
Examination of Inertial Sensor-Based Estimation Methods of Lower Limb Joint Moments and Ground Reaction Force: Results for Squat and Sit-to-Stand Movements in the Sagittal Plane

Abstract
:1. Introduction
2. Materials and Methods
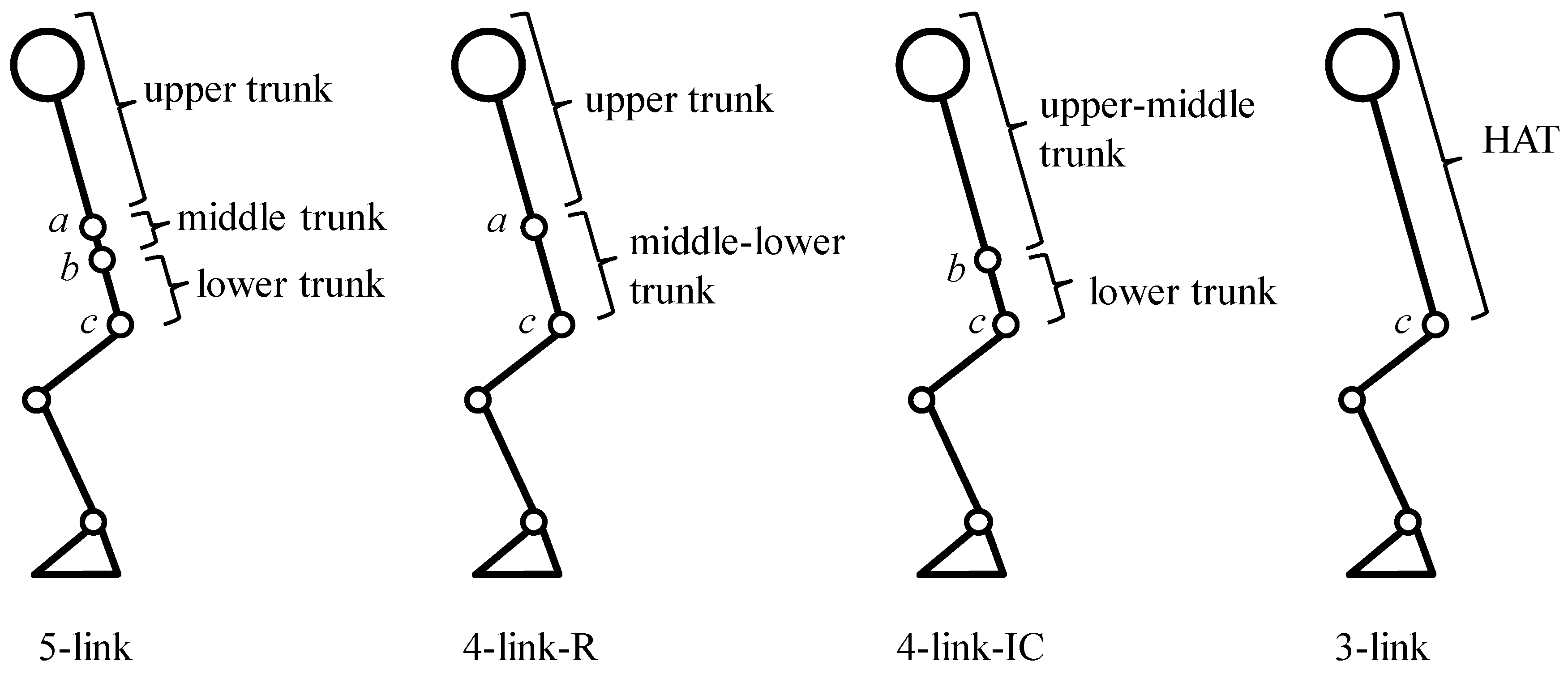
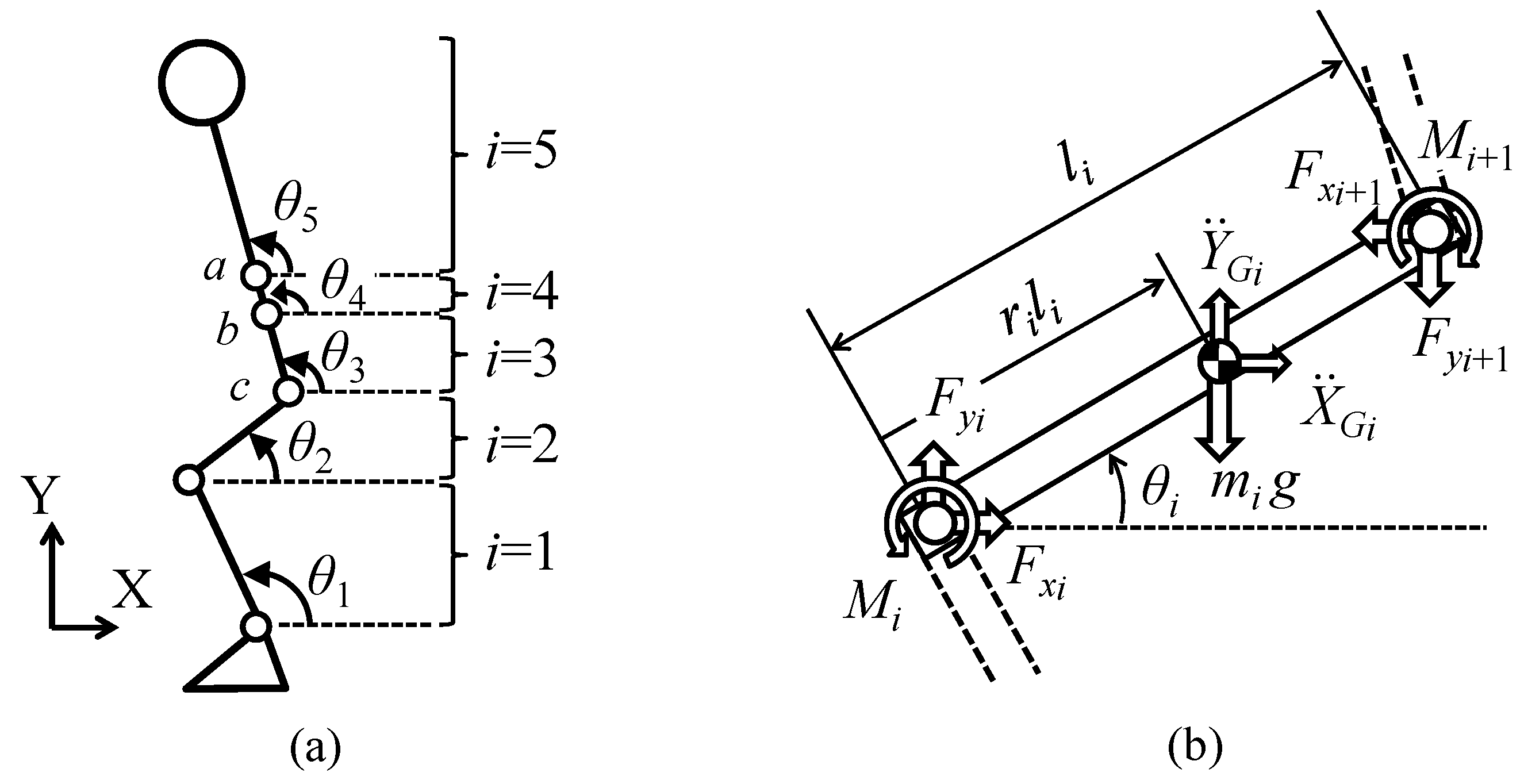
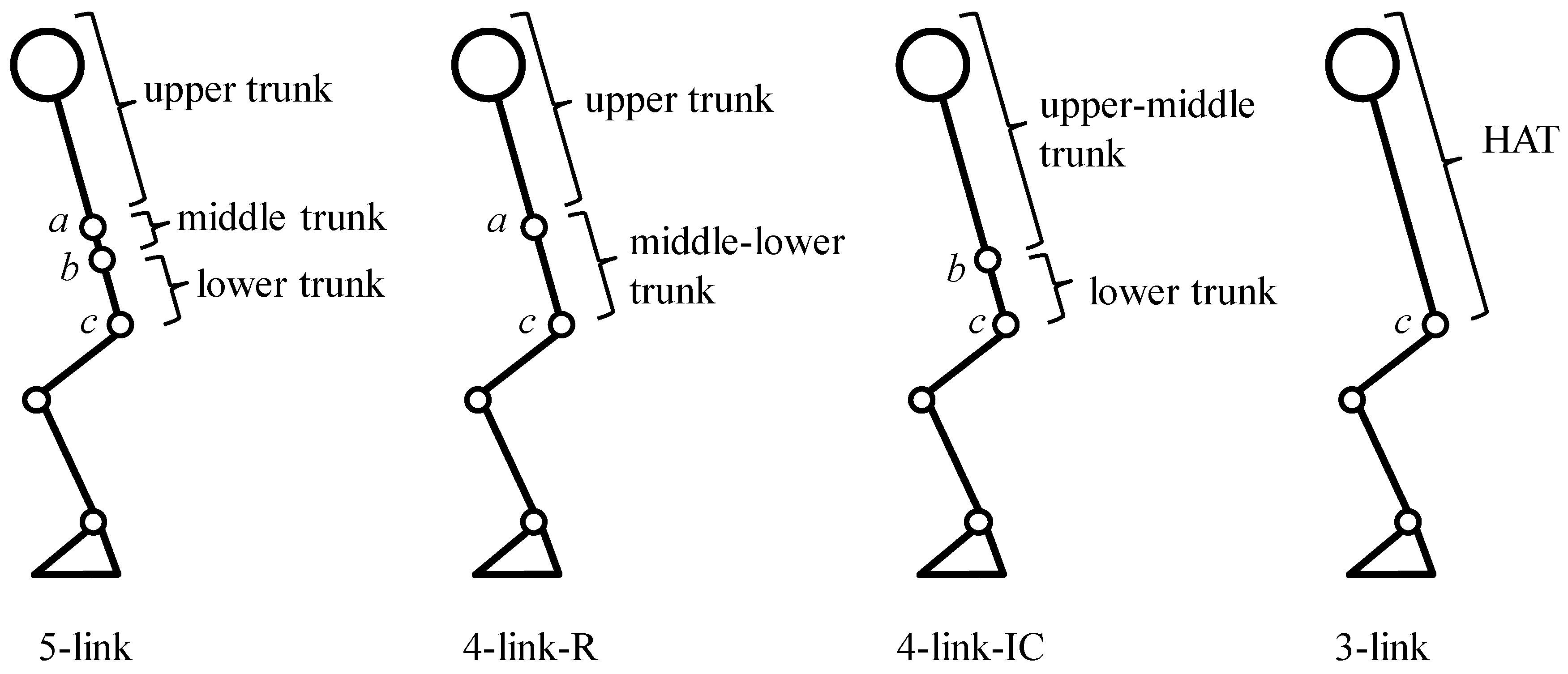
2.1. Rigid Body Link Model
2.2. Estimation of Joint Moment
2.3. Experimental Method
3. Results
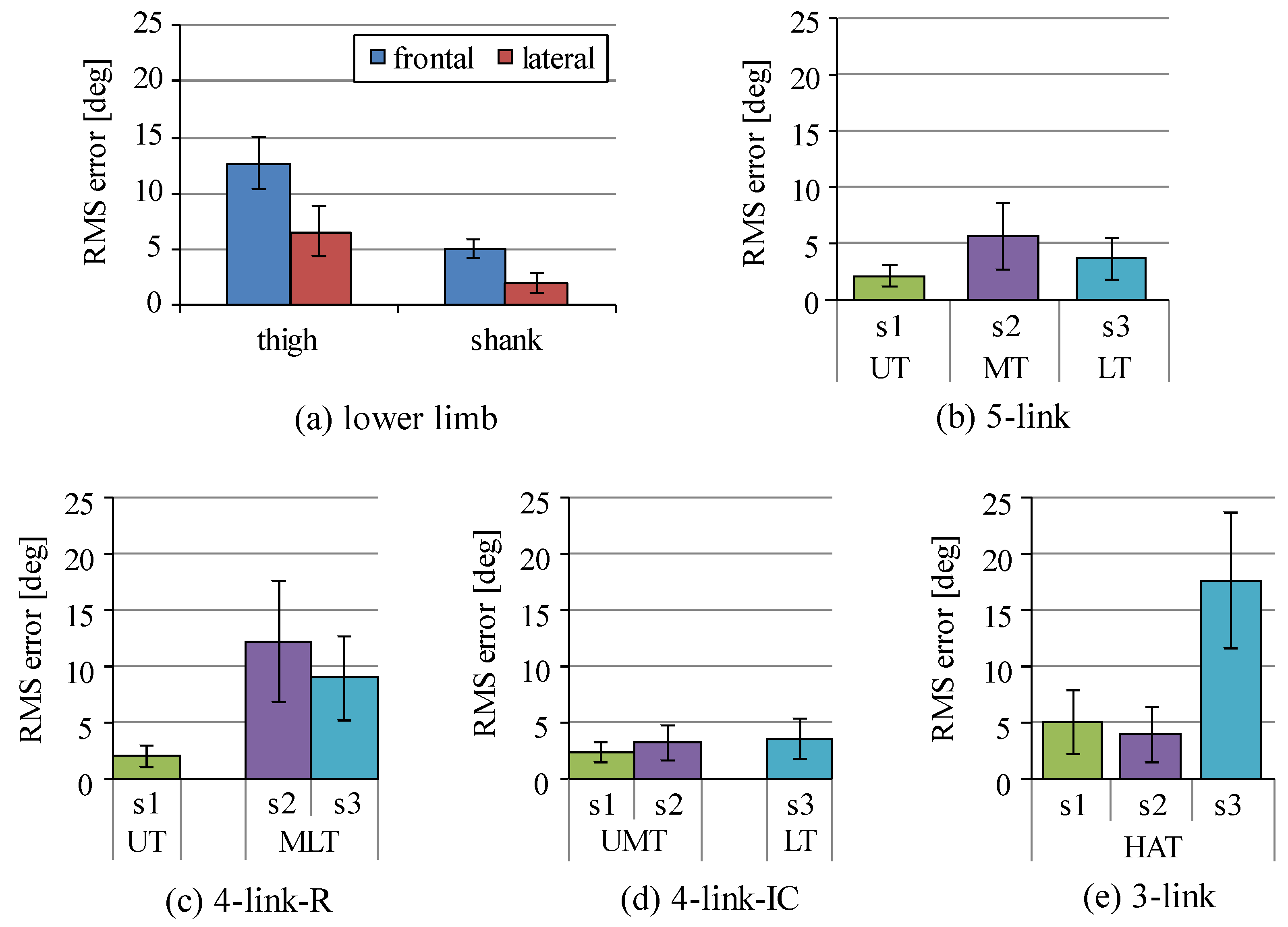
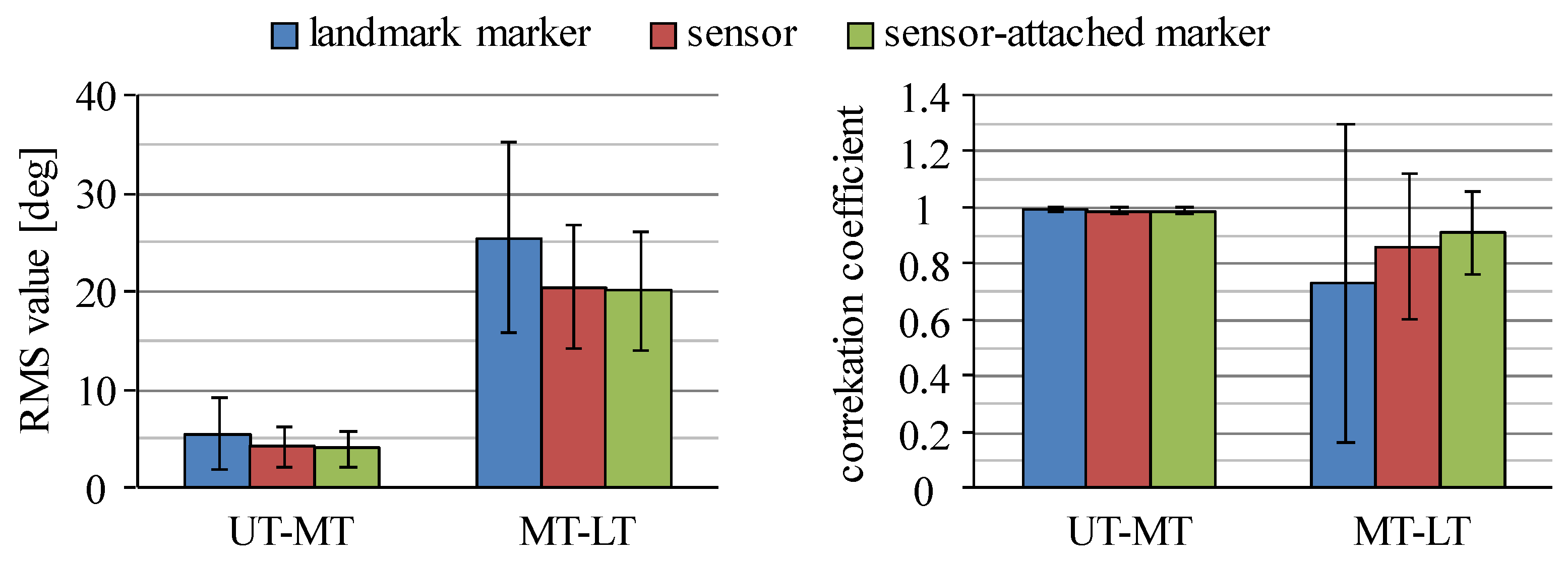
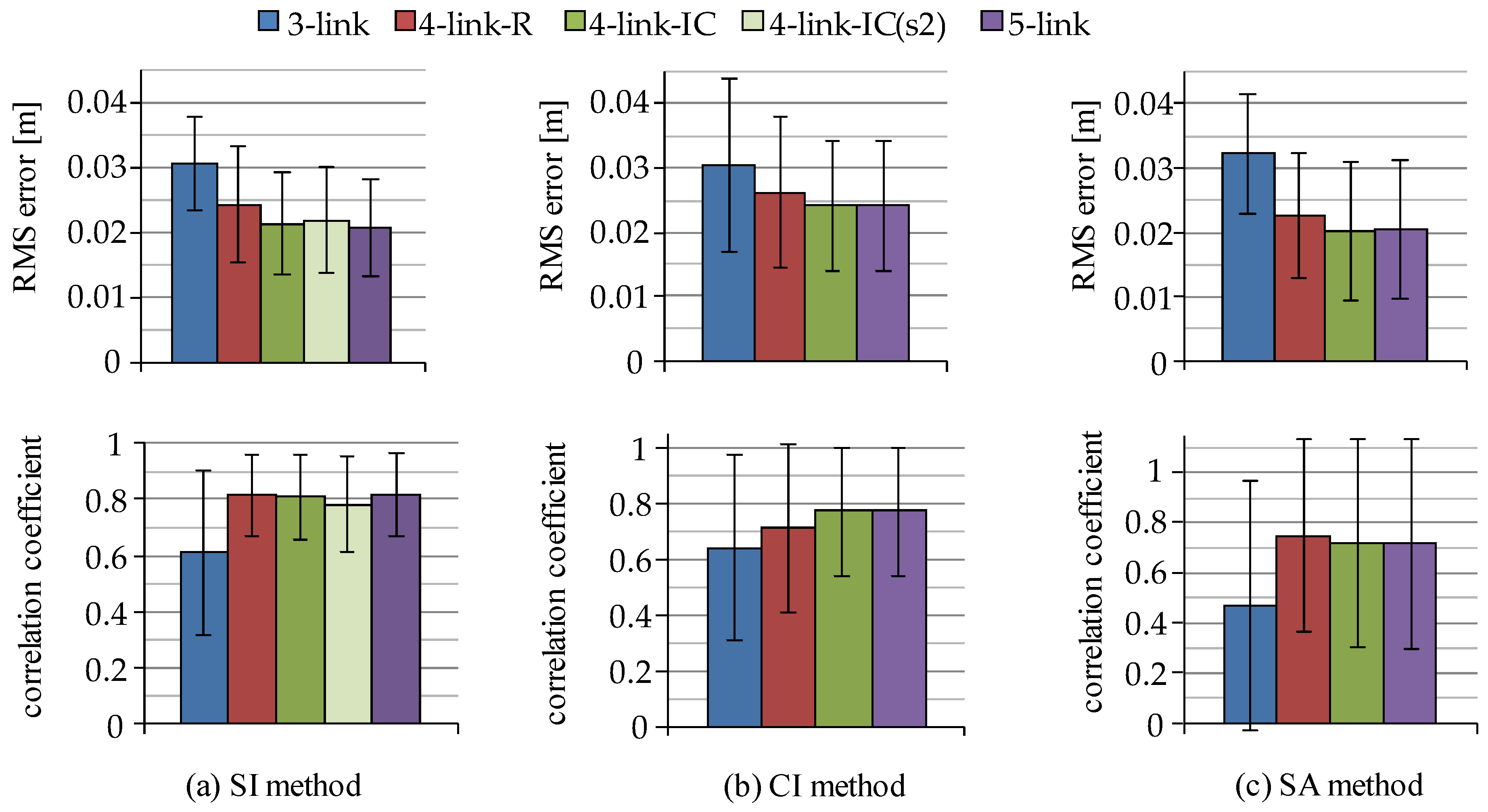
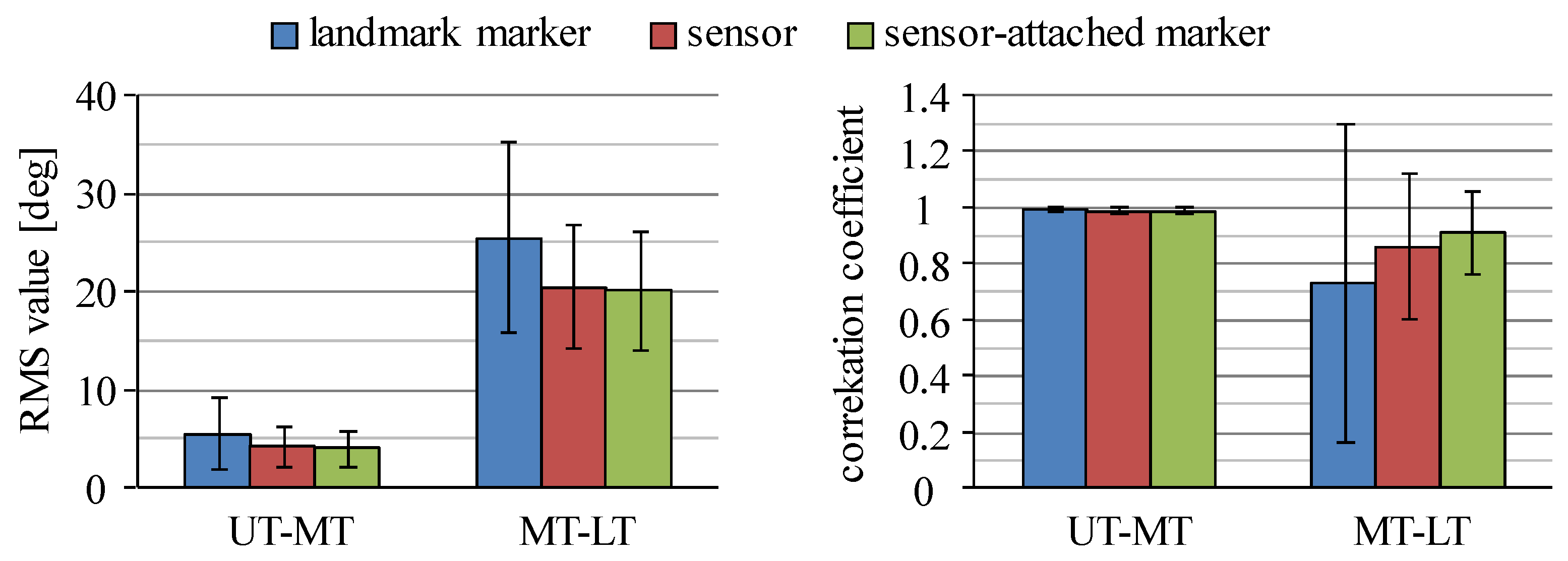
3.1. Estimation of Inclination Angles
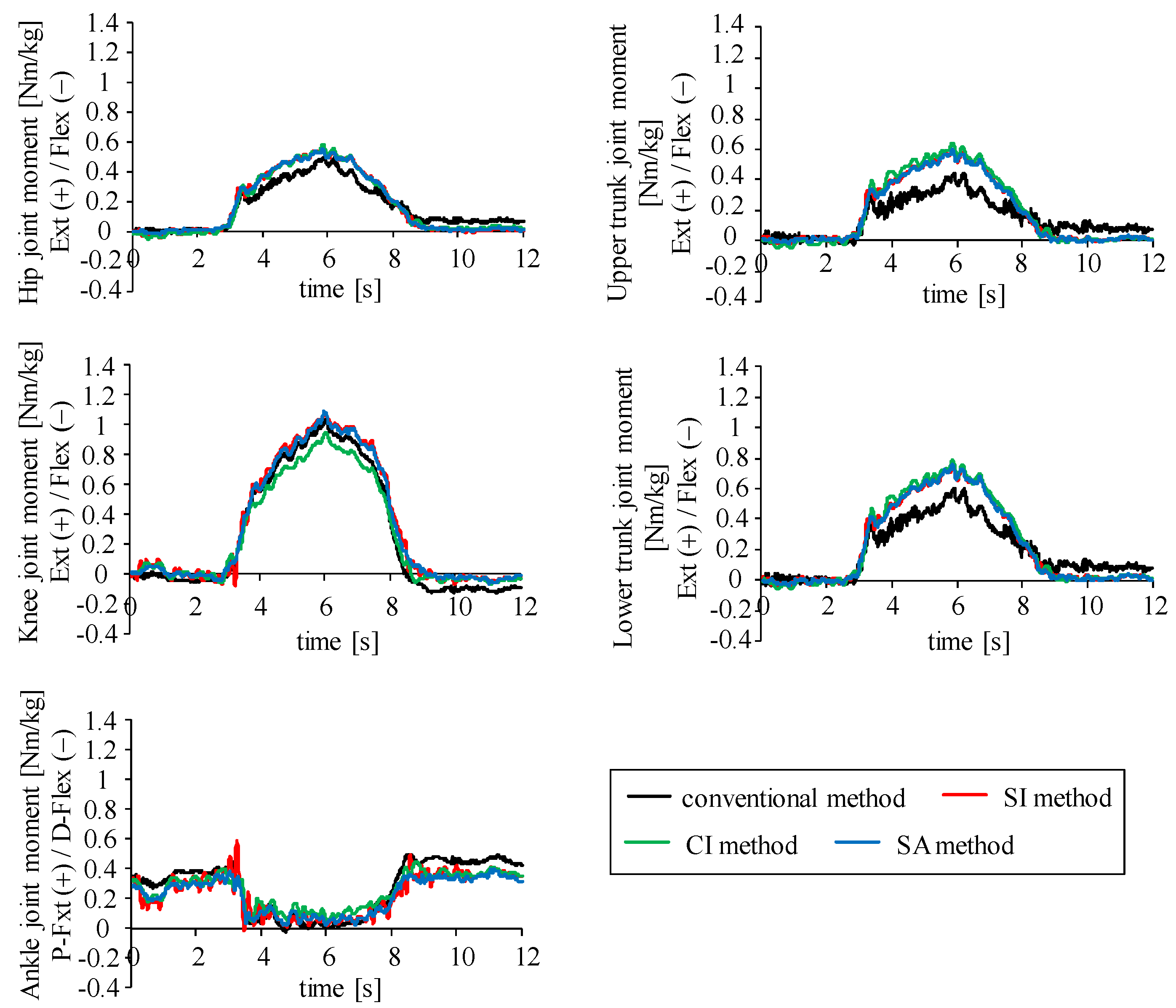
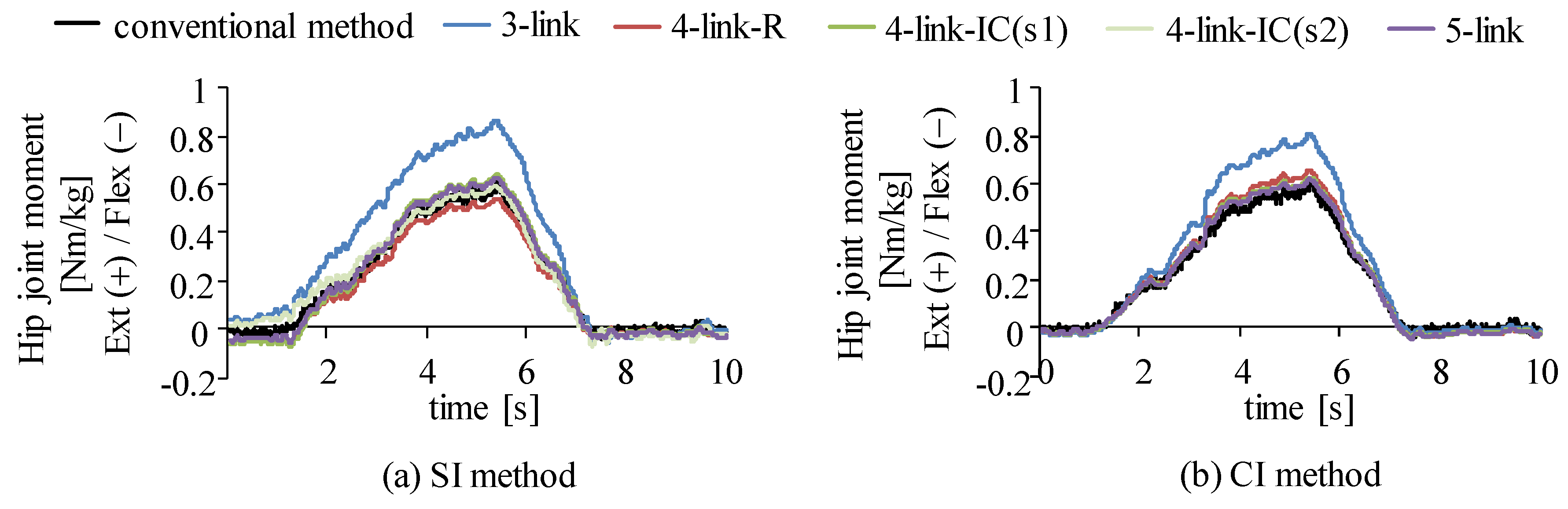
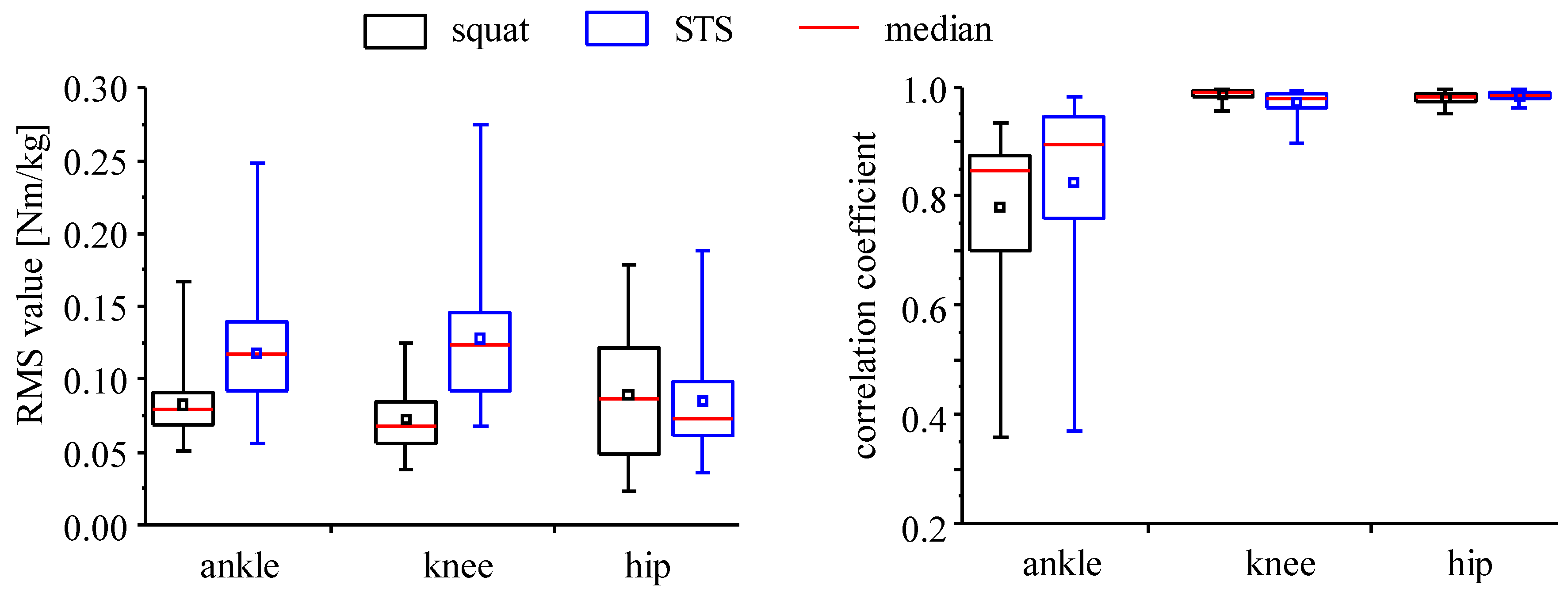
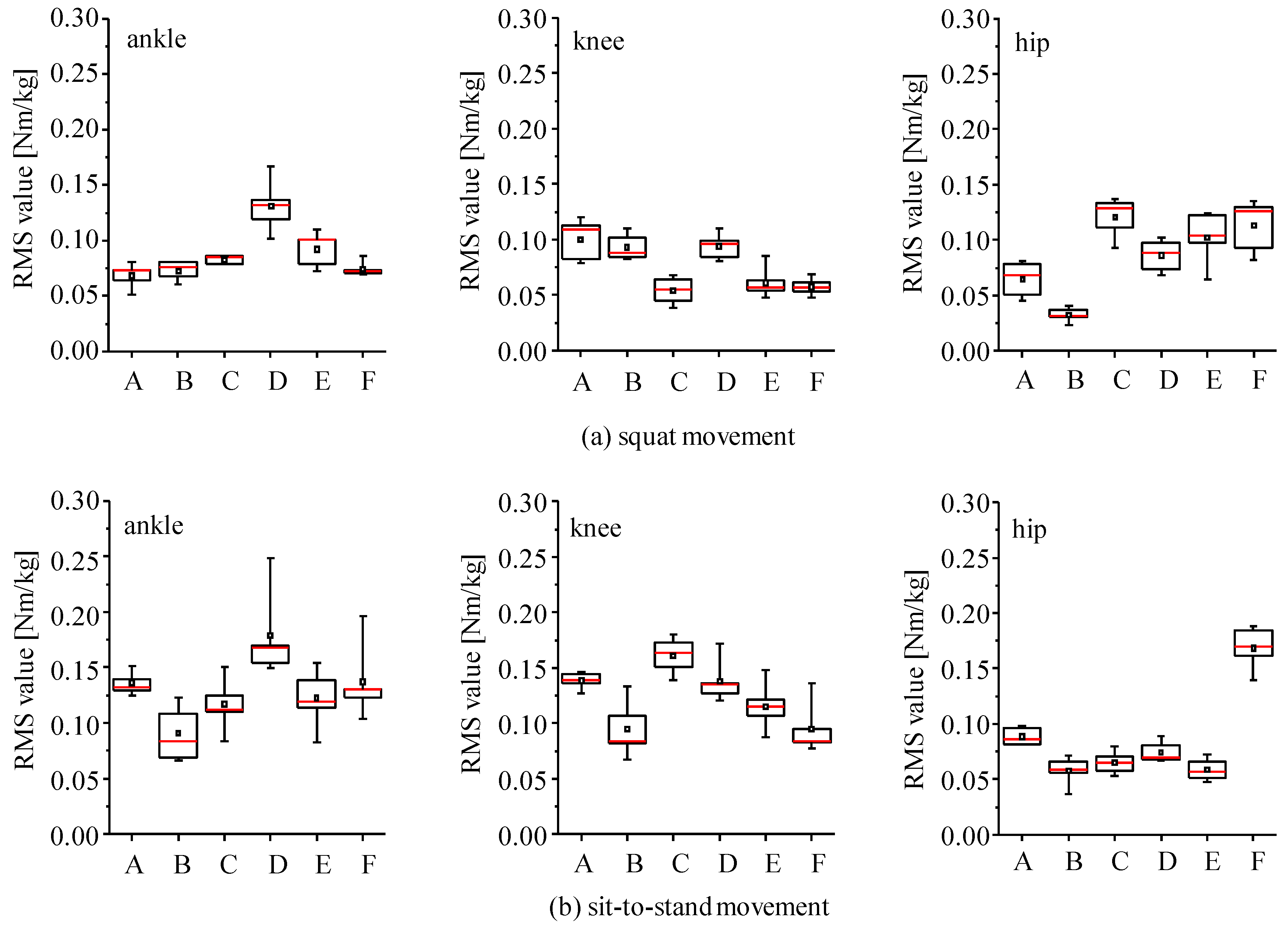
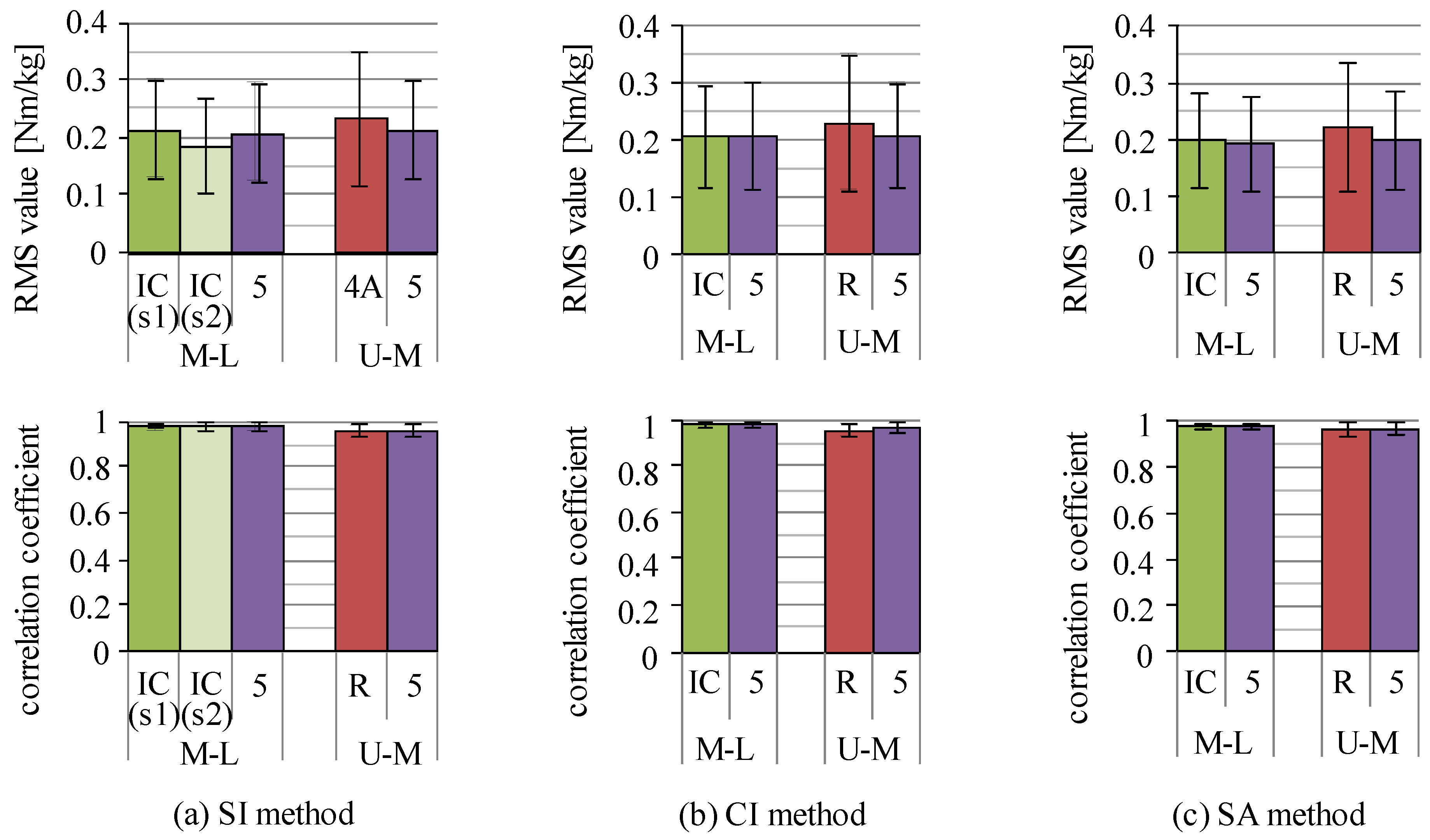
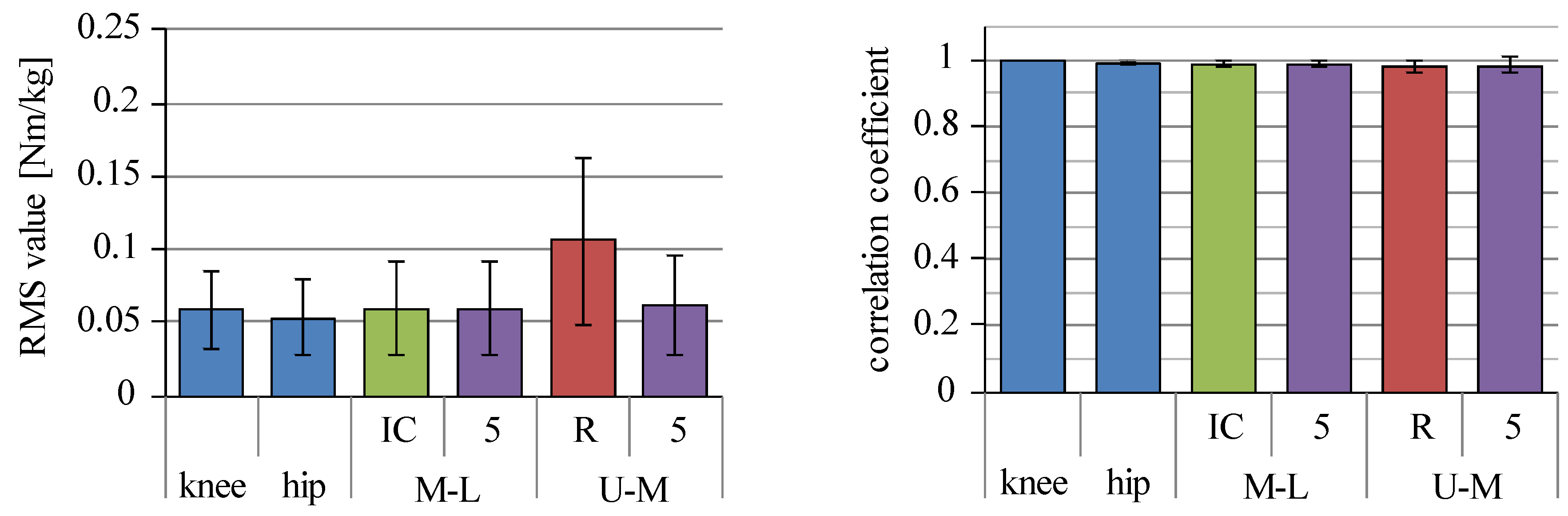
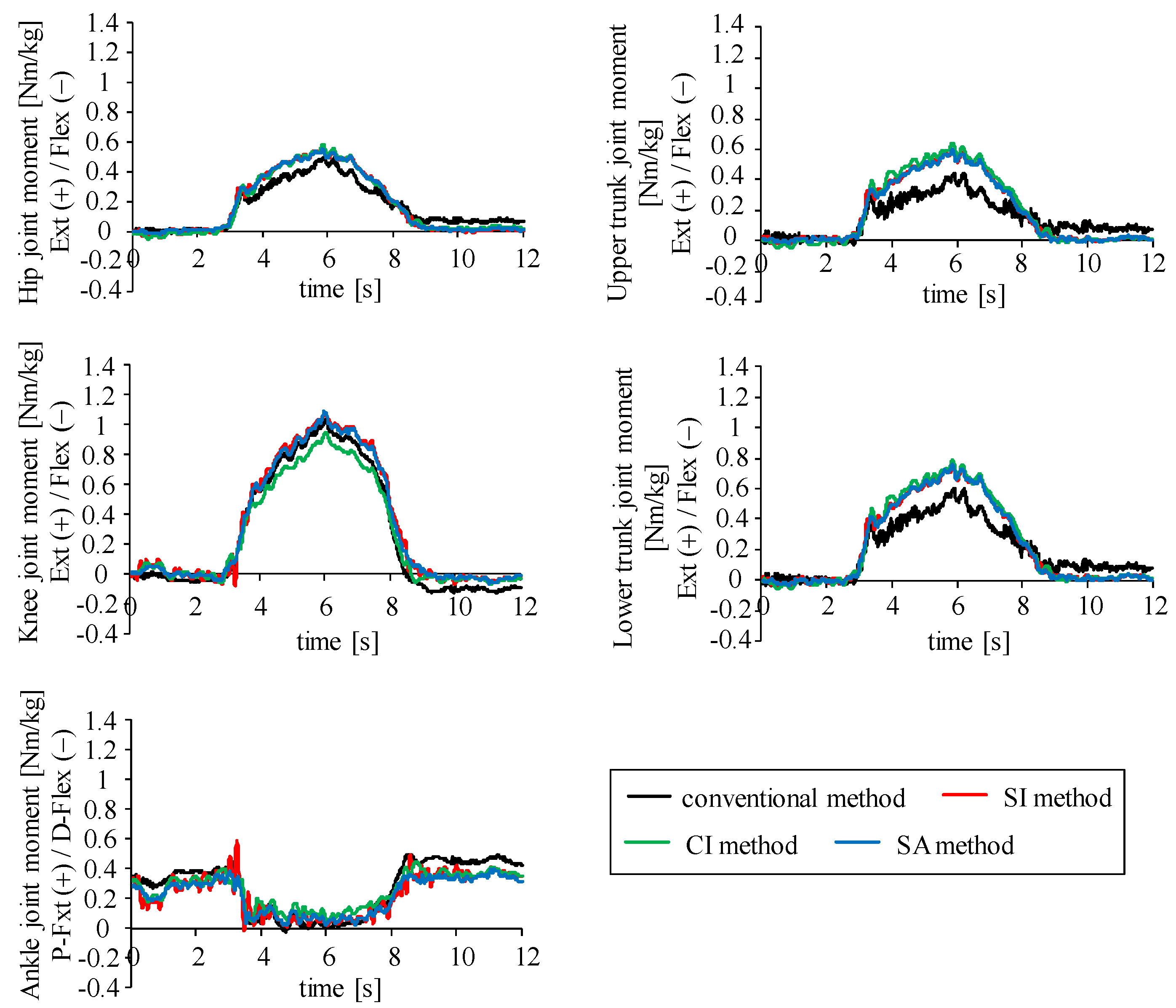
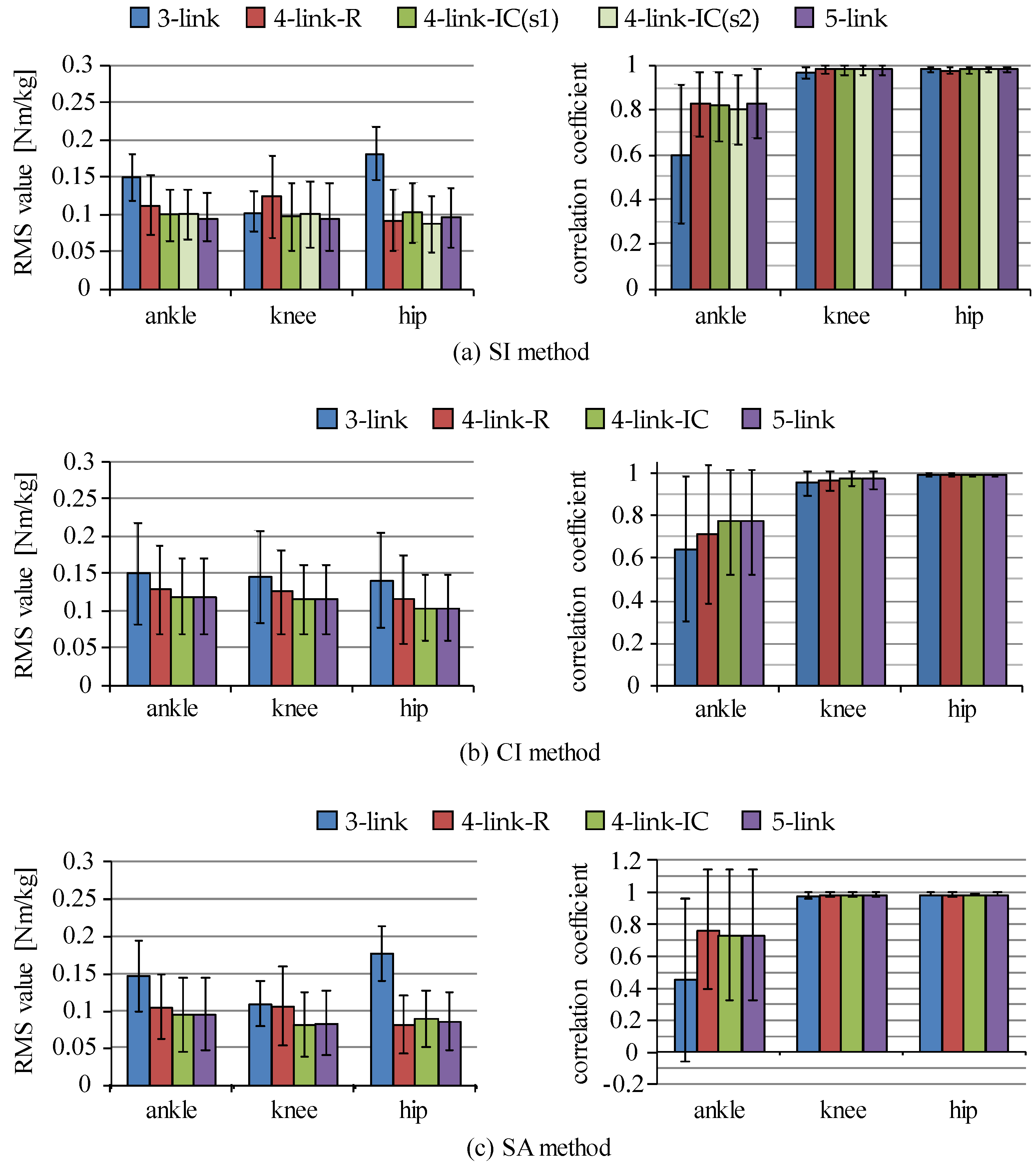
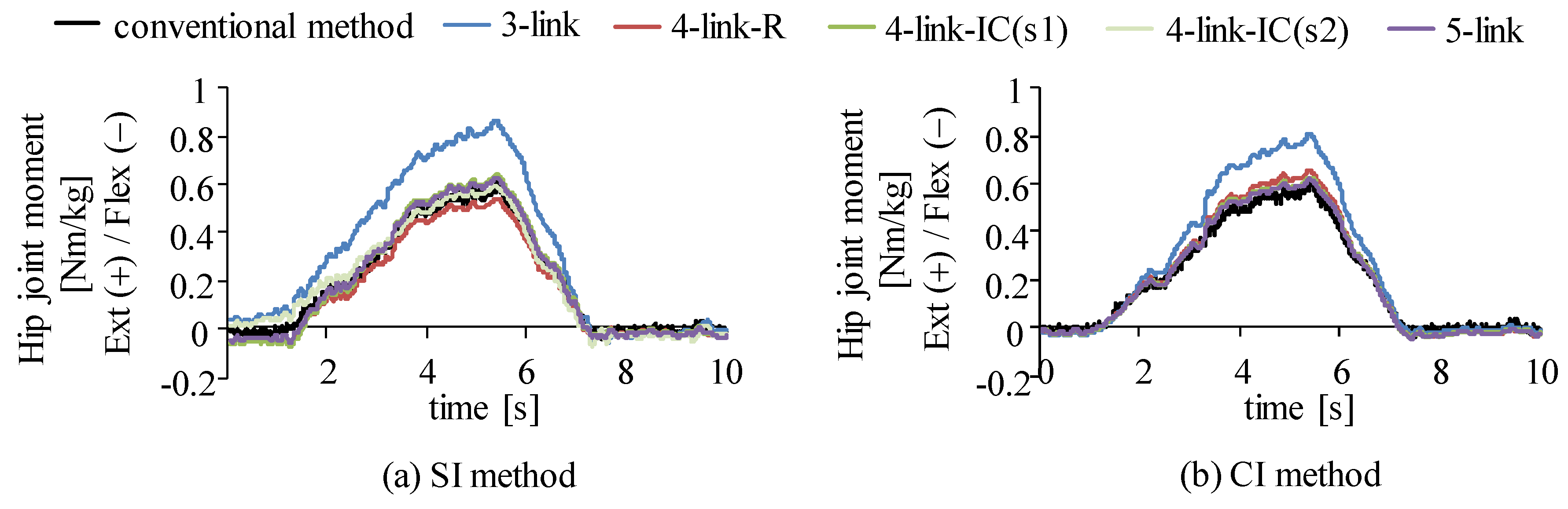
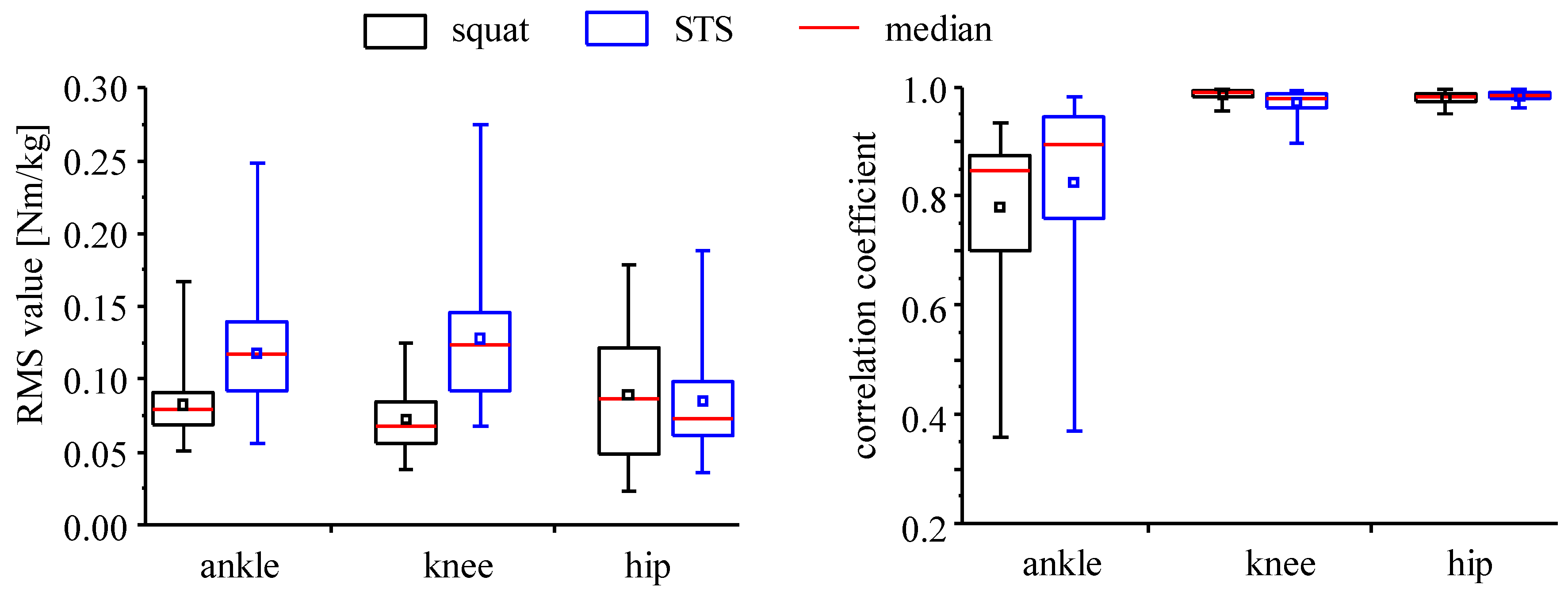
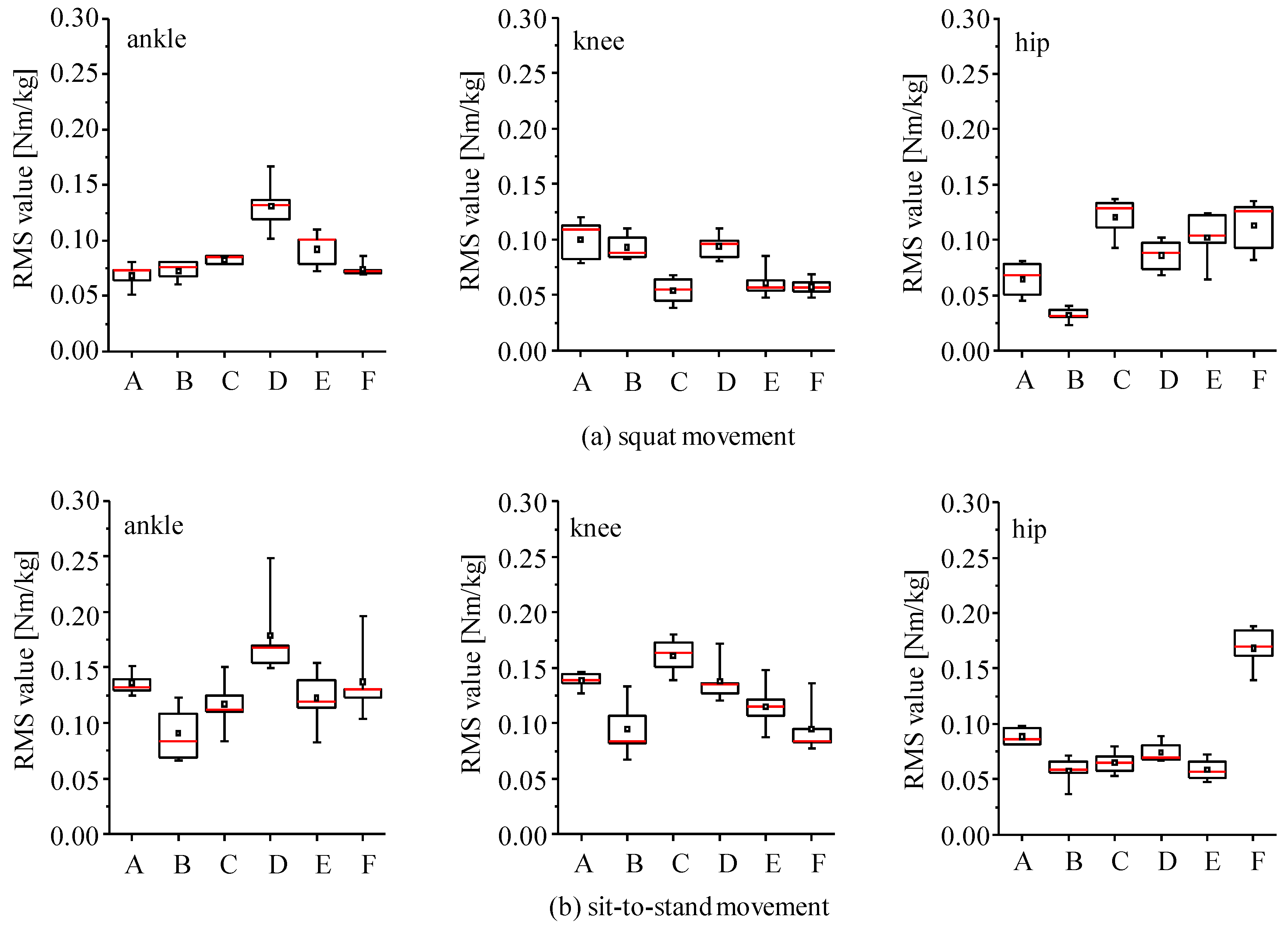
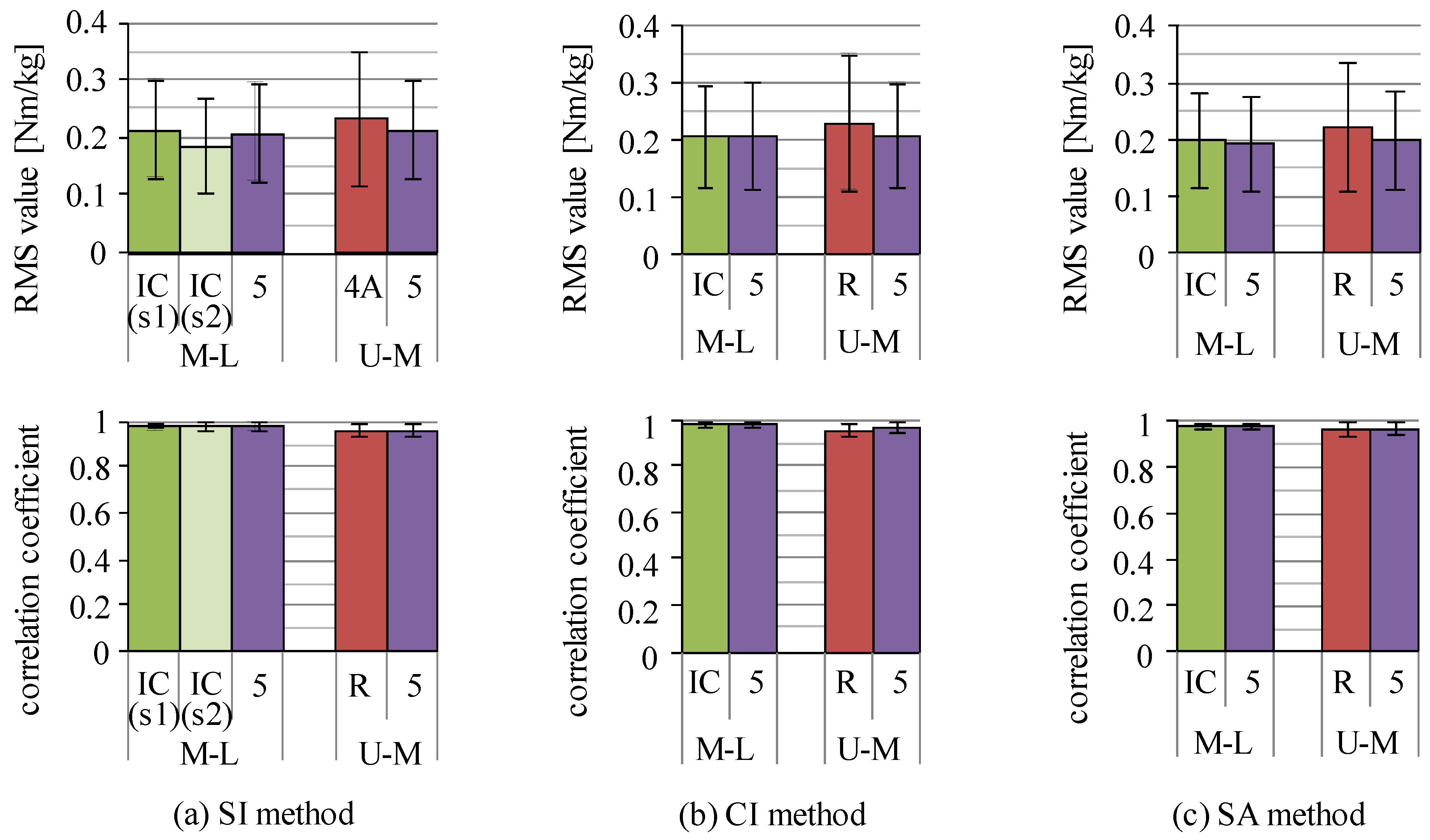
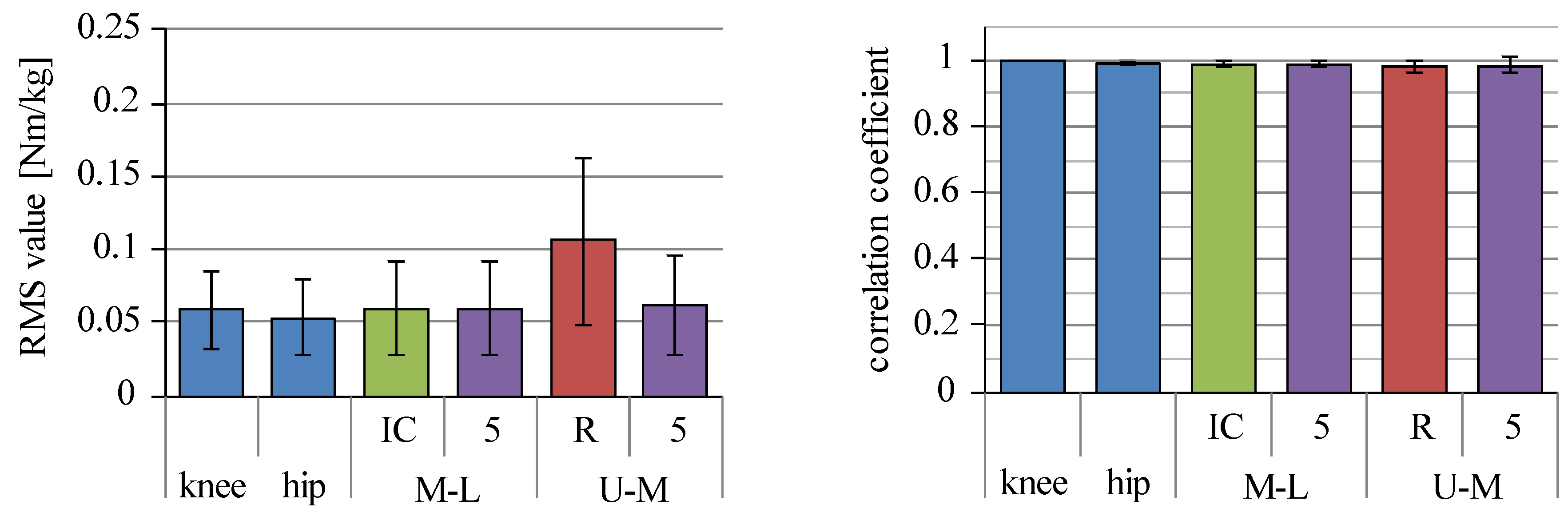
3.2. Joint Moment Estimation
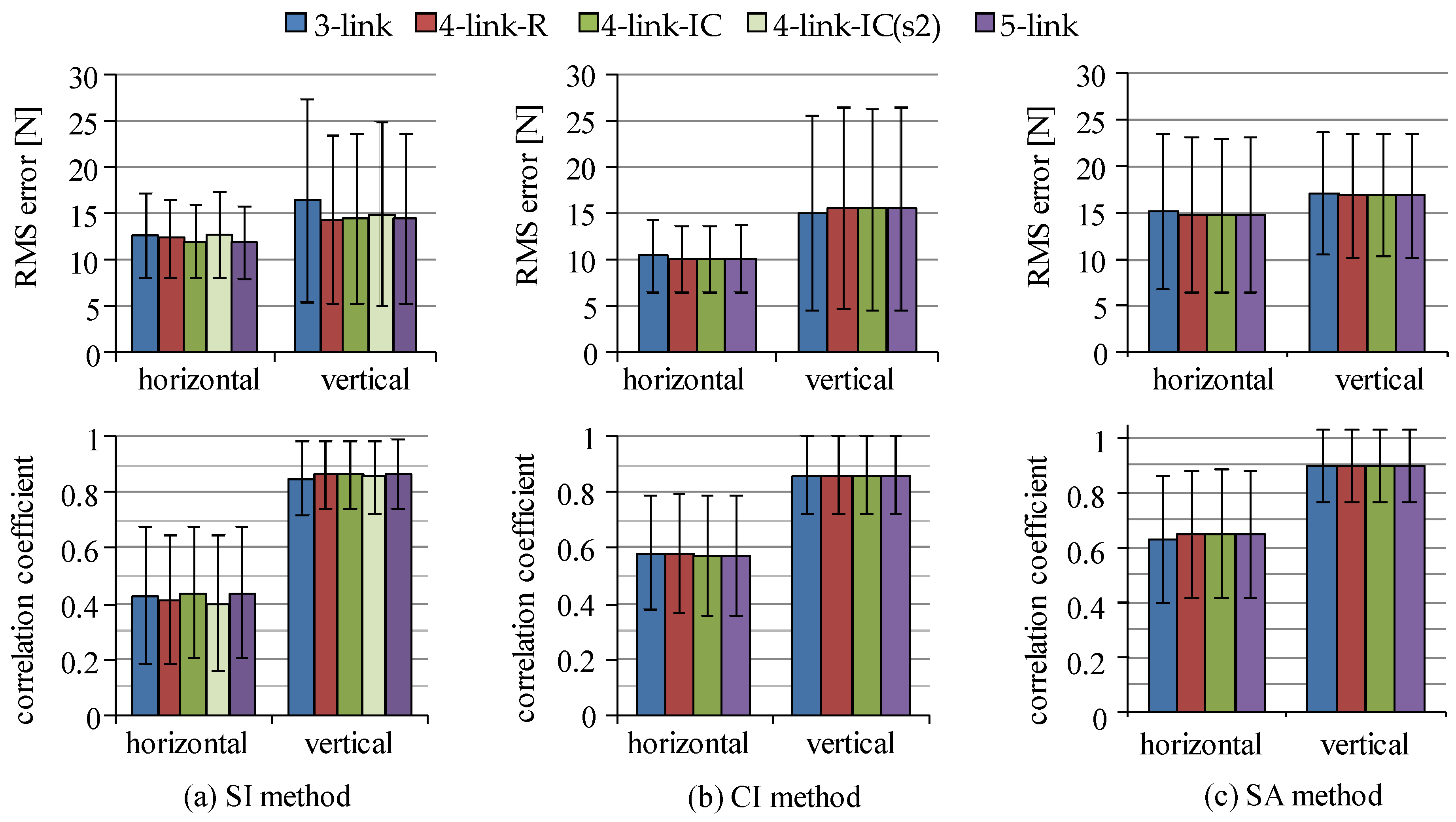
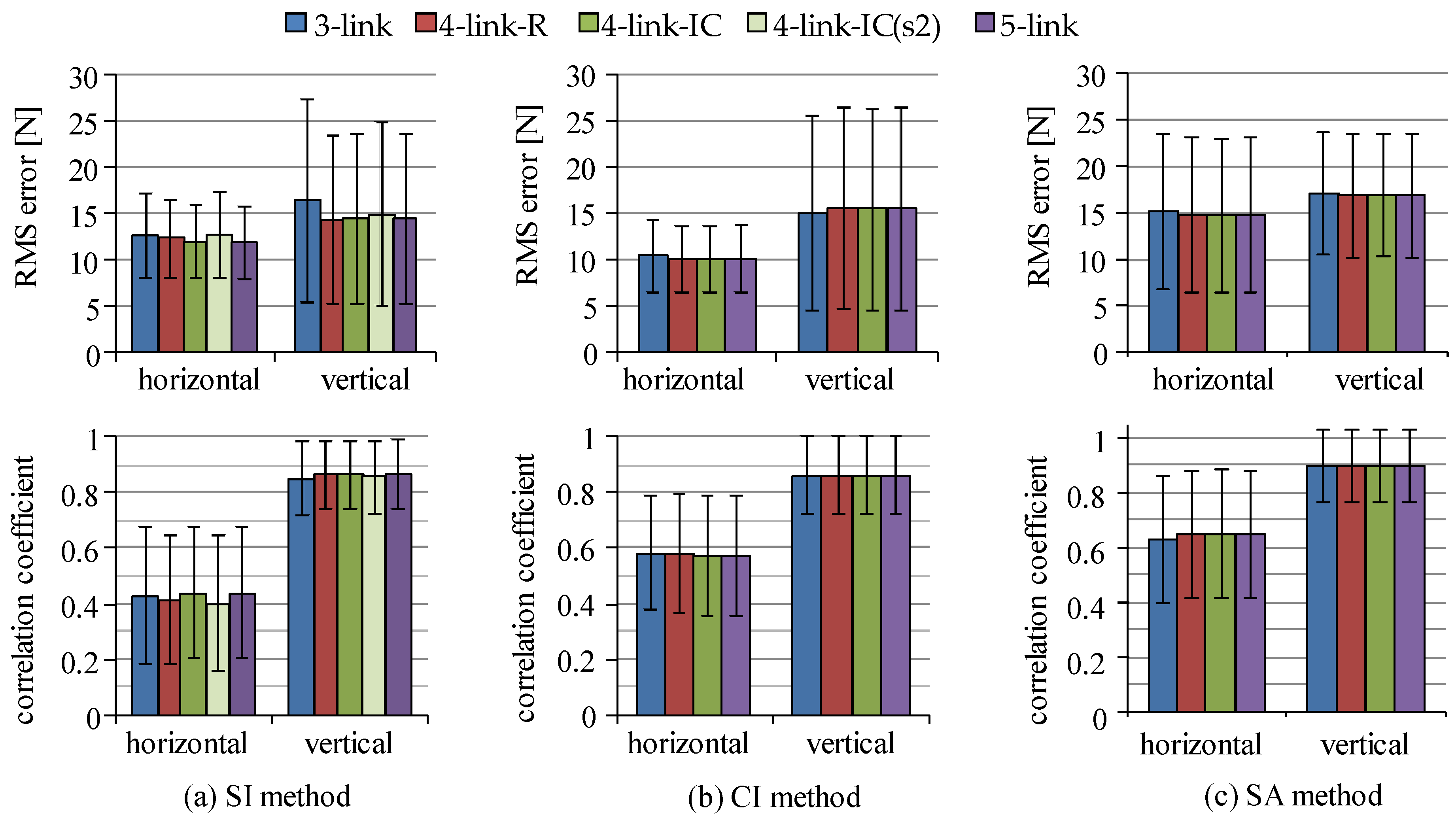
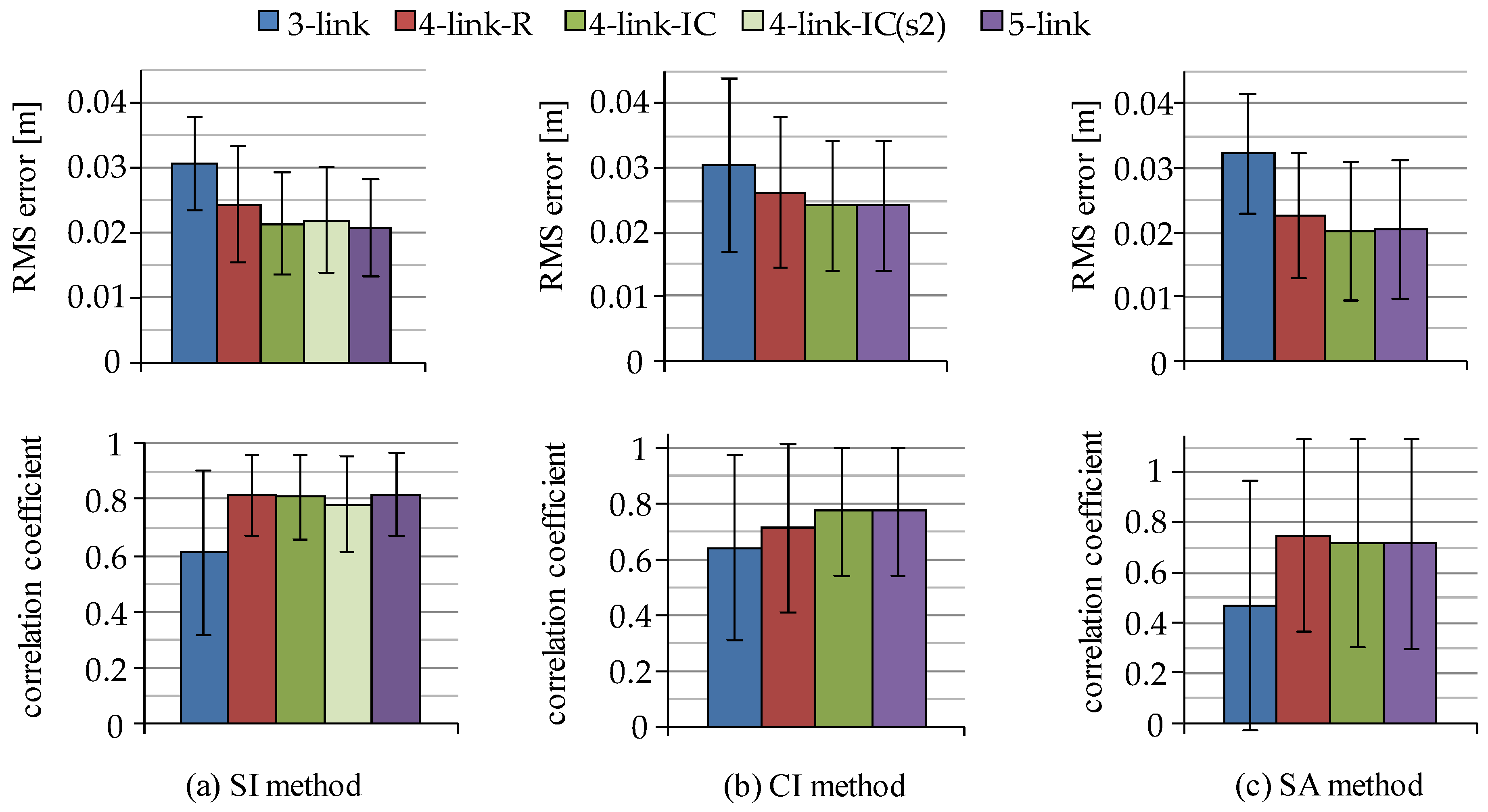
3.3. Ground Reaction Force
4. Discussions
4.1. Estimation of Inclination Angles
4.2. Estimation of Joint Moments and Ground Reaction Forces
4.3. Joint Moment Estimation Method for an Easy to Use System
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bolink, S.A.; van Laarhoven, S.N.; Lipperts, M.; Heyligers, I.C.; Grimm, B. Inertial sensor motion analysis of gait, sit-stand transfers and step-up transfers: Differentiating knee patients from healthy controls. Physiol. Meas. 2012, 33, 1947–1958. [Google Scholar] [CrossRef] [PubMed]
- Guo, Y.; Zhao, G.; Liu, Q.; Mei, Z.; Ivanov, K.; Wang, L. Balance and knee extensibility evaluation of hemiplegic gait using an inertial body sensor network. Biomed. Eng. Online 2013, 12. [Google Scholar] [CrossRef] [PubMed]
- Watanabe, T.; Shibasaki, J. Measurement of Gait Movements of a Hemiplegic Subject with Wireless Inertial Sensor System before and after Robotic-assisted Gait Training in a Day. IFMBE Proc. 2014, 41, 1730–1733. [Google Scholar]
- Watanabe, T.; Endo, S.; Murakami, K.; Kumagai, Y.; Kuge, N. Movement Change Induced by Voluntary Effort with Low Stimulation Intensity FES-assisted Dorsiflexion: A Case Study with a Hemiplegic Subject. In Proceedings of the 6th International IEEE EMBS Conference on Neural Engineering, San Diego, CA, USA, 6–8 November 2013; pp. 327–330.
- Calliess, T.; Bocklage, R.; Karkosch, R.; Marschollek, M.; Windhagen, H.; Schulze, M. Clinical evaluation of a mobile sensor-based gait analysis method for outcome measurement after knee arthroplasty. Sensors 2014, 14, 15953–15964. [Google Scholar] [CrossRef] [PubMed]
- Van Meulen, F.B.; Reenalda, J.; Buurke, J.H.; Veltink, P.H. Assessment of daily-life reaching performance after stroke. Ann. Biomed. Eng. 2015, 43, 478–486. [Google Scholar] [CrossRef] [PubMed]
- Graham, D.F.; Carty, C.P.; Lloyd, D.G.; Barrett, R.S. Biomechanical predictors of maximal balance recovery performance amongst community-dwelling older adults. Exp. Gerontol. 2015, 66, 39–46. [Google Scholar] [CrossRef] [PubMed]
- Carty, C.P.; Cronin, N.J.; Lichtwark, G.A.; Mills, P.M.; Barrett, R.S. Lower limb muscle moments and power during recovery from forward loss of balance in male and female single and multiple steppers. Clin. Biomech. 2012, 27, 1031–1037. [Google Scholar] [CrossRef] [PubMed]
- Toda, H.; Nagano, A.; Luo, Z. Age and gender differences in the control of vertical ground reaction force by the hip, knee and ankle joints. J. Phys. Ther. Sci. 2015, 27, 1833–1838. [Google Scholar] [CrossRef] [PubMed]
- Chen, T.; Chang, C.C.; Chou, L.S. Sagittal plane center of mass movement strategy and joint kinetics during sit-to-walk in elderly fallers. Clin. Biomech. 2013, 28, 807–812. [Google Scholar] [CrossRef] [PubMed]
- Mak, M.K.; Levin, O.; Mizrahi, J.; Hui-Chan, C.W. Joint torques during sit-to-stand in healthy subjects and people with Parkinson’s disease. Clin. Biomech. 2003, 18, 197–206. [Google Scholar] [CrossRef]
- Roy, G.; Nadeau, S.; Gravel, D.; Piotte, F.; Malouin, F.; McFadyen, B.J. Side difference in the hip and knee joint moments during sit-to-stand and stand-to-sit tasks in individuals with hemiparesis. Clin. Biomech. 2007, 22, 795–804. [Google Scholar] [CrossRef] [PubMed]
- Arpin, D.J.; Stuberg, W.; Stergiou, N.; Kurz, M.J. Motor control of the lower extremity musculature in children with cerebral palsy. Res. Dev. Disabil. 2013, 34, 1134–1143. [Google Scholar] [CrossRef] [PubMed]
- Dos Santos, A.N.; Pavão, S.L.; Santiago, P.R.; de Fatima Salvini, T.; Rocha, N.A. Sit-to-stand movement in children with hemiplegic cerebral palsy: Relationship with knee extensor torque and social participation. Res. Dev. Disabil. 2013, 34, 2023–2032. [Google Scholar] [CrossRef] [PubMed]
- Yoshioka, S.; Nagano, A.; Hay, D.C.; Fukashiro, S. Biomechanical analysis of the relation between movement time and joint moment development during a sit-to-stand task. Biomed. Eng. Online 2009, 8. [Google Scholar] [CrossRef] [PubMed]
- Salem, G.J.; Salinas, R.; Harding, F.V. Bilateral kinematic and kinetic analysis of the squat exercise after anterior cruciate ligament reconstruction. Arch. Phys. Med. Rehabil. 2003, 84, 1211–126. [Google Scholar] [CrossRef]
- Neckel, N.D.; Blonien, N.; Nichols, D.; Hidler, J. Abnormal joint torque patterns exhibited by chronic stroke subjects while walking with a prescribed physiological gait pattern. J. Neuroeng. Rehabil. 2008, 5. [Google Scholar] [CrossRef] [PubMed]
- Abujaber, S.B.; Marmon, A.R.; Pozzi, F.; Rubano, J.J.; Zeni, J.A., Jr. Sit-To-Stand Biomechanics Before and After Total Hip Arthroplasty. J. Arthroplast. 2015, 30, 2027–2033. [Google Scholar] [CrossRef] [PubMed]
- Judd, D.L.; Dennis, D.A.; Thomas, A.C.; Wolfe, P.; Dayton, M.R.; Stevens-Lapsley, J.E. Muscle strength and functional recovery during the first year after THA. Clin. Orthop. Relat. Res. 2014, 472, 654–664. [Google Scholar] [CrossRef] [PubMed]
- Farquhar, S.J.; Reisman, D.S.; Snyder-Mackler, L. Persistence of Altered Movement Patterns During a Sit-to-Stand Task 1 Year Following Unilateral Total Knee Arthroplasty. Phys. Ther. 2008, 88, 567–579. [Google Scholar] [CrossRef] [PubMed]
- Kerkum, Y.L.; Houdijk, H.; Brehm, M.A.; Buizer, A.I.; Kessels, M.L.; Sterk, A.; van den Noort, J.C.; Harlaar, J. The Shank-to-Vertical-Angle as a parameter to evaluate tuning of Ankle-Foot Orthoses. Gait Posture 2015, 42, 269–274. [Google Scholar] [CrossRef] [PubMed]
- Fatone, S.; Gard, S.A.; Malas, B.S. Effect of Ankle-Foot Orthosis Alignment and Foot-Plate Length on the Gait of Adults with Poststroke Hemiplegia. Arch. Phys. Med. Rehabil. 2009, 90, 810–818. [Google Scholar] [CrossRef] [PubMed]
- Winter, D.A. Biomechanics and Motor Control of Human Movement, 2nd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2009. [Google Scholar]
- Khurelbaatar, T.; Kim, K.; Lee, S.; Kim, Y.H. Consistent accuracy in whole-body joint kinetics during gait using wearable inertial motion sensors and in-shoe pressure sensors. Gait Posture 2015, 42, 65–69. [Google Scholar] [CrossRef] [PubMed]
- Faber, G.S.; Kingma, I.; Schepers, H.M.; Veltink, P.H.; Van Dieen, J.H. Determination of joint moments with instrumented force shoes in a variety of tasks. J. Biomech. 2010, 43, 2848–2854. [Google Scholar] [CrossRef] [PubMed]
- Faber, G.S.; Chang, C.C.; Kingma, I.; Dennerlein, J.T.; van Dieën, J.H. Estimating 3D L5/S1 moments and ground reaction forces during trunk bending using a full-body ambulatory inertial motion capture system. J. Biomech. 2016, 49, 904–912. [Google Scholar] [CrossRef] [PubMed]
- Kingma, I.; de Looze, M.P.; Toussaint, H.M.; Klijnsma, H.G.; Bruijnen, T.B.M. Validation of a full body 3-D dynamic linked segment model. Hum. Mov. Sci. 1996, 15, 833–860. [Google Scholar] [CrossRef]
- Iino, Y.; Kojima, T. Validity of the top-down approach of inverse dynamics analysis in fast and large rotational trunk movements. J. Appl. Biomech. 2012, 28, 420–430. [Google Scholar] [PubMed]
- Zijlstra, W.; Bisseling, R. Estimation of hip abduction moment based on body fixed sensors. Clin. Biomech. 2004, 19, 819–827. [Google Scholar] [CrossRef] [PubMed]
- Young, J.W.; Chandler, R.F.; Snow, C.C.; Robinette, K.M.; Zehner, G.F.; Lofberg, M.S. Anthropometric and Mass Distribution Characteristics of the Adult Female; Technical Report No. FAA-AM-83-16; FAA Civil Aeromedical Institute: Oklahoma, OK, USA, 1983. [Google Scholar]
- Ae, M.; Tang, H.P.; Yokoi, T. Estimation of Inertia Properties of the Body Segments in Japanese Athletes. Biomechanisms 1992, 11, 23–33. (In Japanese) [Google Scholar]
- Clauser, C.E.; McConville, J.T.; Young, J.W. Weight, Volume, and Center of Mass of Segments of the Human Body; Technical Report; Air Force Systems Command, Wright-Patterson Air Force Base: Ohio, OH, USA, August 1969. [Google Scholar]
- AIST Human Body Size Database. Available online: https://www.dh.aist.go.jp/database/91-92/ (accessed on 25 April 2016).
- Usui, S.; Amidror, I. Digital Low-Pass Differentiation for Biological Signal Processing. IEEE Trans. Biomed. Eng. 1982, 29, 686–693. [Google Scholar] [CrossRef] [PubMed]
- Winter, D.A.; Sidwall, H.G.; Hobson, D.A. Measurement and reduction of noise in kinematics of locomotion. J. Biomech. 1974, 7, 157–159. [Google Scholar] [CrossRef]
- Watanabe, T.; Saito, H.; Koike, E.; Nitta, K. A Preliminary Test of Measurement of Joint Angles and Stride Length with Wireless Inertial Sensors for Wearable Gait Evaluation System. Comput. Intell. Neurosci. 2011, 2011. [Google Scholar] [CrossRef] [PubMed]
- Teruyama, Y.; Watanabe, T. Effectiveness of variable-gain Kalman filter based on angle error calculated from acceleration signals in lower limb angle measurement with inertial sensors. Comput. Math. Methods Med. 2013, 2013. [Google Scholar] [CrossRef] [PubMed]
- Benoit, D.L.; Ramsey, D.K.; Lamontagne, M.; Xu, L.; Wretenberg, P.; Renström, P. Effect of skin movement artifact on knee kinematics during gait and cutting motions measured in vivo. Gait Posture 2006, 24, 152–164. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Segment | Segment Length | Mass | Center of Mass Location | Radius of Gyration |
|---|---|---|---|---|
| foot | 14.8 | 1.1 | 0.595 | 17.7 |
| shank | 23.0 | 5.1 | 0.594 | 27.4 |
| thigh | 23.9 | 11.0 | 0.525 | 27.8 |
| lower trunk | 8.1 | 15.4 | 0.397 | 52.5 |
| middle trunk | 3.0 | 3.3 | 0.500 | 97.4 |
| upper trunk | 37.8 | 46.9 | 0.331 | 26.9 |
| middle-lower | 11.1 | 18.7 | 0.391 | 42.5 |
| upper-middle | 40.8 | 50.2 | 0.358 | 25.6 |
| HAT | 48.9 | 65.6 | 0.371 | 25.5 |
| Segment | Position | RMSE (°) | CC |
|---|---|---|---|
| thigh | frontal | 2.33 ± 0.69 | 1.00 ± 0.00 |
| lateral | 2.34 ± 0.80 | 1.00 ± 0.00 | |
| shank | frontal | 0.60 ± 0.33 | 1.00 ± 0.00 |
| lateral | 0.59 ± 0.31 | 1.00 ± 0.00 | |
| trunk | s1 | 1.39 ± 0.88 | 1.00 ± 0.00 |
| s2 | 0.94 ± 0.52 | 1.00 ± 0.00 | |
| s3 | 1.02 ± 0.70 | 0.98 ± 0.08 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kodama, J.; Watanabe, T. Examination of Inertial Sensor-Based Estimation Methods of Lower Limb Joint Moments and Ground Reaction Force: Results for Squat and Sit-to-Stand Movements in the Sagittal Plane. Sensors 2016, 16, 1209. https://doi.org/10.3390/s16081209
Kodama J, Watanabe T. Examination of Inertial Sensor-Based Estimation Methods of Lower Limb Joint Moments and Ground Reaction Force: Results for Squat and Sit-to-Stand Movements in the Sagittal Plane. Sensors. 2016; 16(8):1209. https://doi.org/10.3390/s16081209
Chicago/Turabian StyleKodama, Jun, and Takashi Watanabe. 2016. "Examination of Inertial Sensor-Based Estimation Methods of Lower Limb Joint Moments and Ground Reaction Force: Results for Squat and Sit-to-Stand Movements in the Sagittal Plane" Sensors 16, no. 8: 1209. https://doi.org/10.3390/s16081209