
Combining Charge Couple Devices and Rate Sensors for the Feedforward Control System of a Charge Coupled Device Tracking Loop

Abstract
:1. Introduction
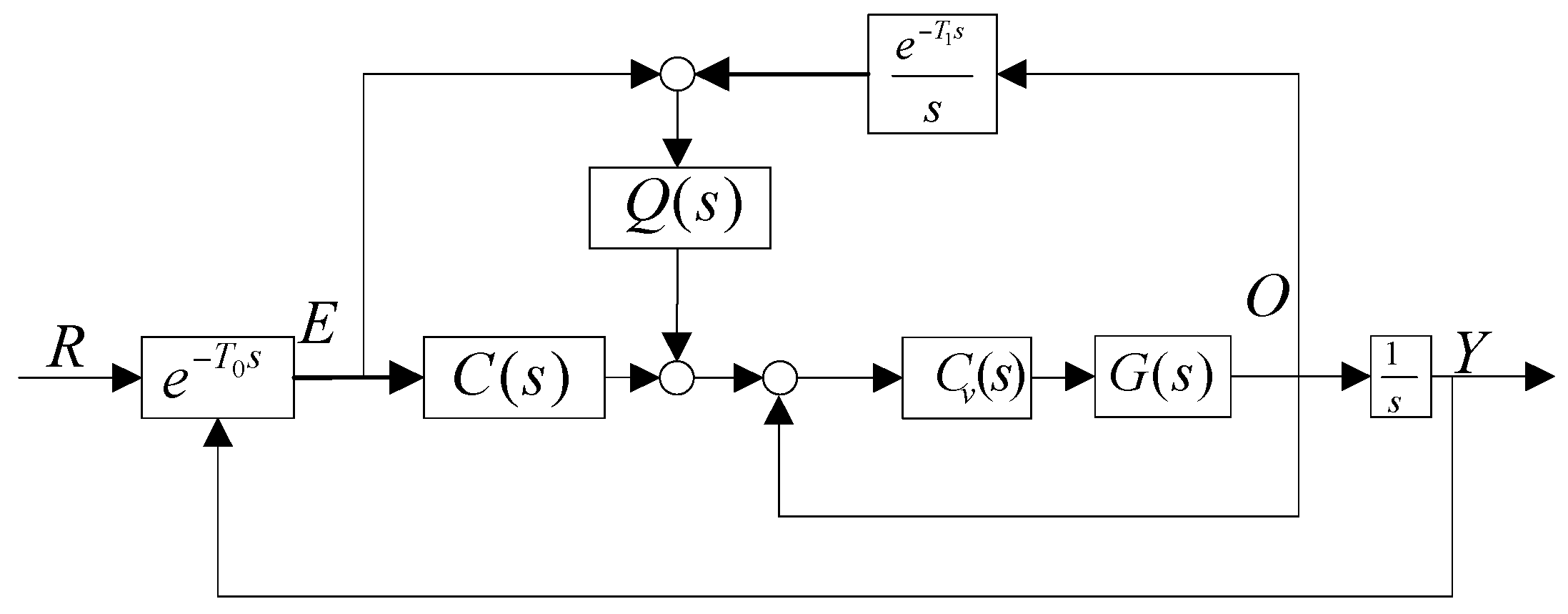
2. Feedforward Control Based on Sensor Fusion
3. Parameters Design
4. Performance Analysis
5. Simulations and Experiments
5.1. Simulations
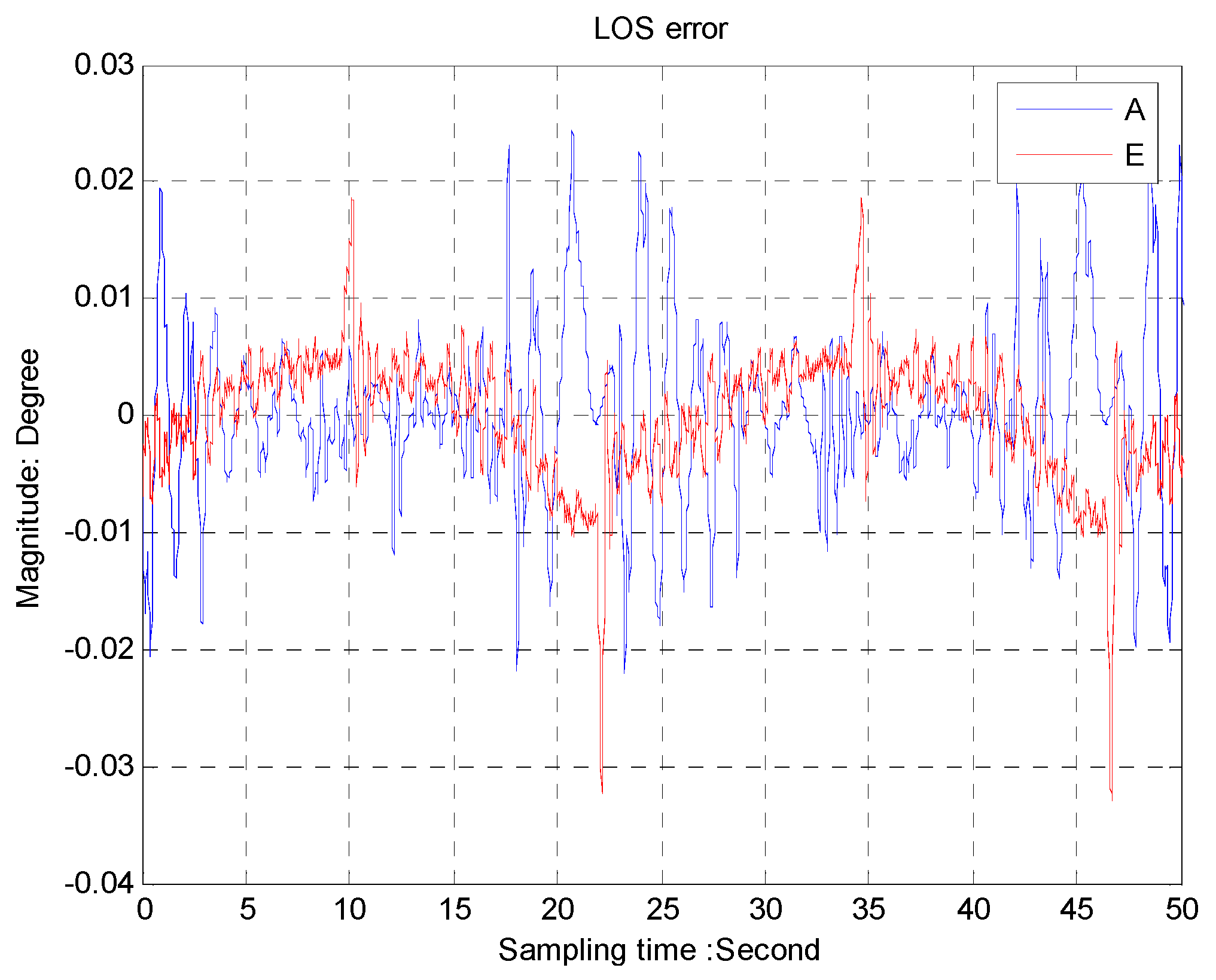
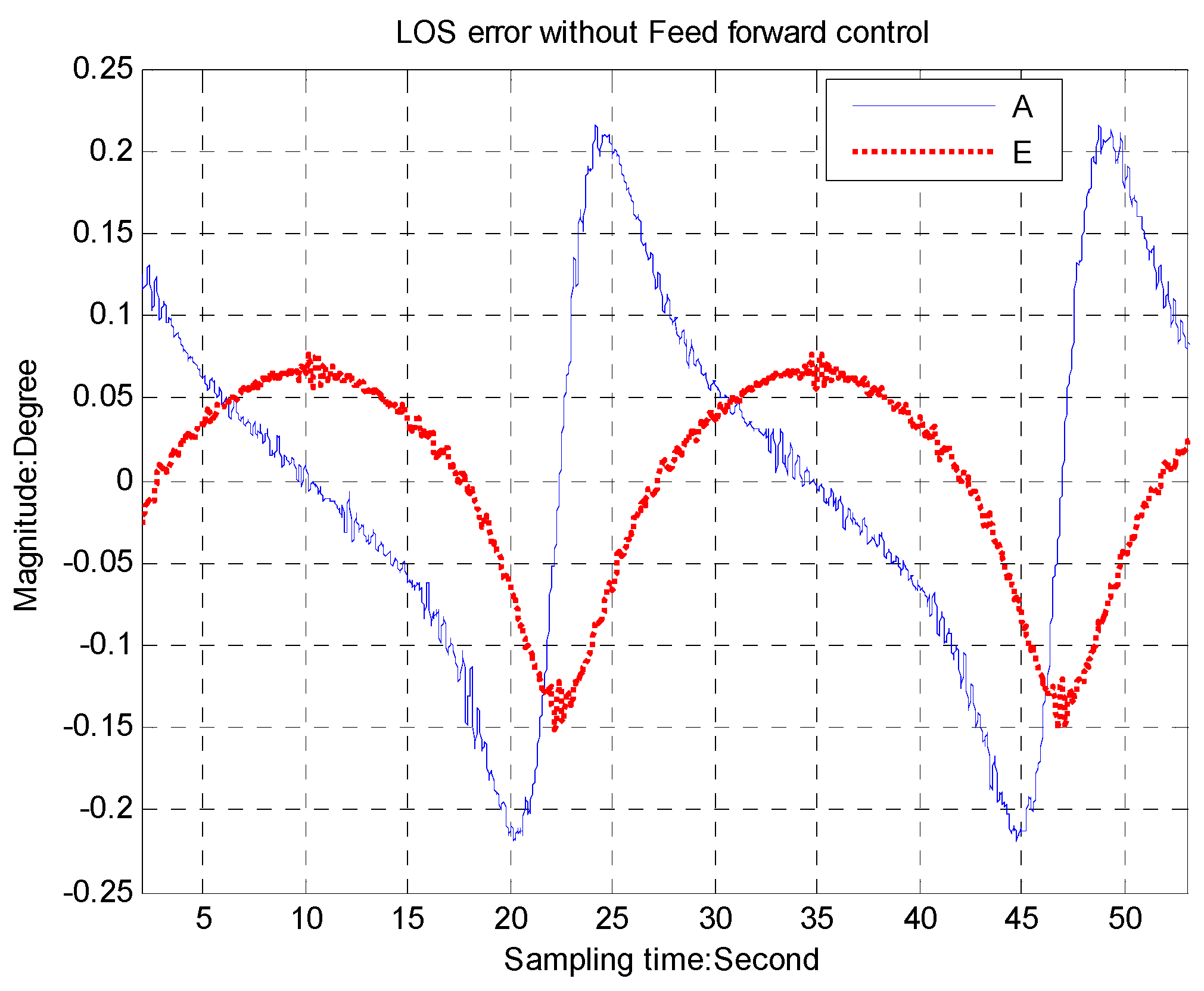
5.2. Experiments
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hutchinson, S.; Hager, G.D.; Corke, P.I. A Tutorial on Visual Servo Control. IEEE Trans. Rob. Autom. 1996, 12, 651–670. [Google Scholar] [CrossRef]
- Dhou, S.; Motai, Y. Scale-invariant optical flow in tracking using a pan-tilt-zoom camera. Rob. Available CJO 2014. [Google Scholar] [CrossRef]
- Motai, Y.; Jha, S.K.; Kruse, D. Human tracking from a mobile agent: Optical flow and Kalman filter arbitration. Signal Proc. Image Commun. 2012, 27, 83–95. [Google Scholar] [CrossRef]
- Hurak, Z.; Rezac, M. Delay compensation in a dual-rate cascade visual servomechanism. In Proceedings of the 49th IEEE Conference on Decision and Control, Atlanta, GA, USA, 15–17 December 2010.
- Fitts, J.M. Aided tracking as Applied to High Accuracy Pointing Systems. IEEE Trans. Aerosp. Electron. Syst. 1973, AES-9, 350–368. [Google Scholar] [CrossRef]
- Downey, G.A., Jr.; Fountain, H.W.; Riding, T.J.; Eggleston, J.; Hopkins, M.; Adams, B. Sled tracking system. Proc. SPIE Acquis. Track. Pointing 1991, 40. [Google Scholar] [CrossRef]
- Hilkert, J.M. Kinematic Algorithms for Line-of-Sight Pointing and Scanning using INS/GPS Position and Velocity Information. In Proceedings of the SPIE on Acquisition, Tracking, and Pointing XIX, Bellingham, WA, USA, 28 March 2005; Volume 5810.
- Corke, P.I. Visual Control of Robots: High-Performance Visual Servoing. In Mechatronics; Research Studies Press: Hertfordshire, UK, 1996. [Google Scholar]
- Ekstrand, B. Tracking Filters and Models for Seeker Applications. IEEE Trans. Aerosp. Electron. Syst. 2001, 37, 965–977. [Google Scholar] [CrossRef]
- Waldmann, J. Line-of-Sight Rate Estimation and Linearizing Control of an Imaging Seeker in a Tactical Missile Guided by Proportional Navigation. IEEE Trans. Control Syst. Technol. 2002, 10, 556–567. [Google Scholar] [CrossRef]
- Palumbo, N.F.; Blauwkamp, R.A.; Lloyd, J.M. Basic Principles of Homing Guidance. Johns Hopkin Apl Tech. Dig. 2010, 29, 25–41. [Google Scholar]
- L, X.R.; Jilkov, V.P. Survey of Maneuvering Target Tracking: Dynamic Models. In Proceedings of the SPIE Conference on Signal and Data Processingof Small Targets, Orlando, FL, USA, 24 April 2000.
- Li, X.R.; Jilkov, V.P. Survey of maneuvering target tracking. Part I. Dynamic models. In IEEE Transactions on Aerospace and Electronic Systems; IEEE: New York, NY, USA, 2003; Volume 39, pp. 1333–1364. [Google Scholar]
- Li, X.R.; Jilkov, V.P. Survey of Maneuvering Target Tracking. Part II: Motion Models of Ballistic and Space Targets. In IEEE Transactions on Aerospace and Electronic Systems; IEEE: New York, NY, USA, 2010; Volume 46, pp. 96–119. [Google Scholar]
- Lee, B.; Park, Y.J.B. An intelligent tracking method for a maneuvering target. Int. J. Control Autom. Syst. 2003, 1, 344–350. [Google Scholar]
- Horowitz, R.; Li, Y.; Oldham, K.; Kon, S.; Huang, X.H. Dual-stage servo systems and vibration compensation in computer hard disk drives. Control Eng. Pract. 2007, 15, 291–305. [Google Scholar] [CrossRef]
- Berger, E.J. Friction modeling for dynamic system simulation. Appl. Mech. Rev. 2002, 55, 535–577. [Google Scholar] [CrossRef]
- Boerlage, M.; Steinbuch, M.; Lambrechts, P.; van de Wal, M. Model-based feedforward for motion systems. In Proceedings of 2003 IEEE Conference on Control Applications, Istanbul, Turkey, 23–25 June 2003; pp. 1158–1163.
- Hilkert, J.M. Alpha-Theta Technol, Richardson Inertially stabilized platform technology Concepts and principles. IEEE Control Syst. Mag. 2008, 28, 26–46. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frame Frequency | 50 Hz |
| Pixels | 640 × 512 |
| Pixel Size | 5.5 µm |
| Focus Length | 30–450 mm |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, T.; Tian, J.; Zhong, D.; Fu, C. Combining Charge Couple Devices and Rate Sensors for the Feedforward Control System of a Charge Coupled Device Tracking Loop. Sensors 2016, 16, 968. https://doi.org/10.3390/s16070968
Tang T, Tian J, Zhong D, Fu C. Combining Charge Couple Devices and Rate Sensors for the Feedforward Control System of a Charge Coupled Device Tracking Loop. Sensors. 2016; 16(7):968. https://doi.org/10.3390/s16070968
Chicago/Turabian StyleTang, Tao, Jing Tian, Daijun Zhong, and Chengyu Fu. 2016. "Combining Charge Couple Devices and Rate Sensors for the Feedforward Control System of a Charge Coupled Device Tracking Loop" Sensors 16, no. 7: 968. https://doi.org/10.3390/s16070968