3.1. Modeling Procedure
In order to predict global dynamic behavior of the Green Building, a 3-D simplified lumped-mass stick model (SLMM) is developed. The SLMM models each floor as a point mass with 6 degrees of freedom—three transverse and three rotational. Successive floor point masses are joined by single beam elements which represent the equivalent stiffness of connecting walls and columns. To determine the equivalent beam stiffness of each story, the 6 × 6 stiffness and mass matrices are computed for each story. The 6 × 6 stiffness matrix is determined by condensing the distributed stiffness properties of an entire floor down to a single point. The procedures to develop a SLMM for tall buildings are as follows:
Develop a detailed finite element model of each unique story.
Extract node locations and the global stiffness matrix from the detailed FE model.
Condense the global stiffness matrix to the slab degrees of freedom using static condensation.
Condense the slab stiffness matrix down to a 6 × 6 stiffness matrix corresponding to a point on the slab surface by using geometric transformations.
Assemble each story’s 6 × 6 stiffness and mass matrices to develop the simplified stiffness and mass matrices for the entire building.
3.1.1. Stiffness Matrix Estimation
Mass and stiffness matrices are extracted to develop 6 × 6 condensed matrices for simplified stick dynamic model of the 21-story building from the detailed finite element model (FEM) of each unique story. The detailed FEM of each story has fixed end boundary conditions in each end of the columns. Then each story has following procedures to develop condensed matrices. These condensed matrices in each story will be combined to each other to develop entire structure’s mass and stiffness matrices. In each story all nodes are divided into master or slave nodes. The slab nodes are assumed to drive the motion of the floor and they are defined as master nodes for static condensation to the floor slab DOFs. The remaining nodes are defined as slave nodes with zero mass. The dynamic equations of motion for an undamped system, excluding damping, are written in partitioned form, where master degrees of freedom have the ‘MM’ subscript.
is zero because no external forces are applied to the slave DOFs,
denotes the slave DOFs, and
denotes the master DOFs. Thus, Equation (1) is divided into two equations:
Equation (3) permits a static relationship between
and
because no inertia terms or external force are associated with
Then by substituting Equation (4) into Equation (2):
Then
The next step is to condense the slab degrees of freedom to a point on the slab surface which is considered as a rigid plate. Assuming that the N slab master nodes have six degrees of freedom:
where
,
,
,
,
, and
are the three translational and three rotational displacements of node
j, and
are the coordinate of that node. A reference point, usually the center of mass, is defined as
. The rigid body motion of the floor slab is:
where
are the rigid body motion components at reference point
, and the rigid body transformation matrix is:
For simplicity, the reference point of each story is taken to be at elevation
= 0, so all
terms are 0. z coordinate of each slab node is zero. The rotational effects due to the distances
and
are effected to center of geometry’s global Z-directional rotation. Hence:
Next, we assume that external forces are applied only to the master nodes. The external forces applied to the master node are related to the forces on all remnant nodes by the following transformation:
Combining Equations (12) and (13):
where
.
is the story’s 6 × 6 stiffness matrix.
The 6 × 6 stiffness matrix of each floor can now be transformed into the 12 × 12 stiffness of a standard beam element.
is the stiffness matrix of a beam element whose displacements or degrees of freedom
are defined at the two ends such as first story and second story of the building.
and
are the specific story numbers with coordinates
and
The stiffness matrix of this beam element will have the form:
, and
are stiffness matrices of the rigid plate relative to any one end,
, which consists of three translations and three rotations. The displacements at the other end are then defined as:
For an upright beam element,
and
are zero, and
is height of each story. A rigid body motion of a free body requires no external forces, then:
Hence:
where
and
. Thus, the entire stiffness matrix for N number of story building is expressed as:
where
is the
N-th number of story of the entire building. To apply the boundary conditions of the entire Green building model, the last row and column of the
are removed since the bottom columns are assumed to be fixed.
3.1.2. Mass Matrix
Here is a necessary overview of the floor models we used. In summary, we used Autodesk Simulation Multiphysics (ASM) and modeled the floors using beam and shell elements. The 6 × 6 mass matrix consists of the total floor mass, the mass products of inertia, and the mass moments of inertia. These quantities can either be computed by hand based on the floor geometry, or output from ASM. The mass product and mass moment of inertia are computed relative to the center of mass (reference point).
The global mass matrix of the SLMM is assembled by overlapping the 12 × 12 mass matrices of each equivalent beam element. As with the stiffness matrix, only the 6 × 6 mass matrix of each story is needed to define each story’s full mass matrix. This 6 × 6 matrix is found by computing the mass properties of a floor and assuming that each of the two nodes defining the equivalent beam receives one half of the mass properties:
The form of an individual floor mass matrix is found in Equation (24), where mx = my = mz is the full floor mass; Jxx, Jyy and Jzz are the mass moments of inertia with respect to a point aligned with the center of mass; and Jxy = Jyx, Jxz = Jzx and Jyz = Jzy are the mass products of inertia, with respect to the same point. Given a set of orthogonal axis u, v and w and a material density ρ, the equations for the mass moments and mass products of inertia are given in Equations (22) and (23). In practice, the mass products are very small and can be neglected. Density of the concrete is taken to be 2400 kg/m3.
Using
matrix of
N-th of the Green Building in Equation (24), the final lumped mass matrix of the Green building is developed using the same procedure as for the stiffness matrix (Equation (21)). The lumped global mass matrix of the entire Green building is:
To get the mass matrix of the entire Green Building, the last row and column of are removed due to the clamped boundary condition. Also is multiplied by two to consider additional mass from roof mounted radio and meteorological equipment.
3.1.3. Damping Matrix
In order to develop the damping matrix of the structure using the mass and stiffness matrices,
and
, Rayleigh proportional damping is used:
where:
where
is a 3% damping ratio, and
and
are natural frequencies where
and
are 1 and 2, respectively.
3.2. Modal and Time History Analysis
Modal updating is carried out to match the natural frequencies between the measured from sensors and the calculated from the developed SLMM. In order to find optimal mass and stiffness values in each story of the structure, advanced multi-objective genetic algorithms are applied [
29,
30]. The fitness objective functions of the optimization are:
where,
is number of time steps in measurements and absolute displacement of the time history analysis, and
is number of natural frequencies measured and calculated. Single objective based composite objective function requires weight for each component of the objectives to evenly or purposely assign the contribution of each objective to an eventual fitness objective value. However, multi-objective optimization does not require those weights, which is one of the main advantages of multi-objective based optimization [
31,
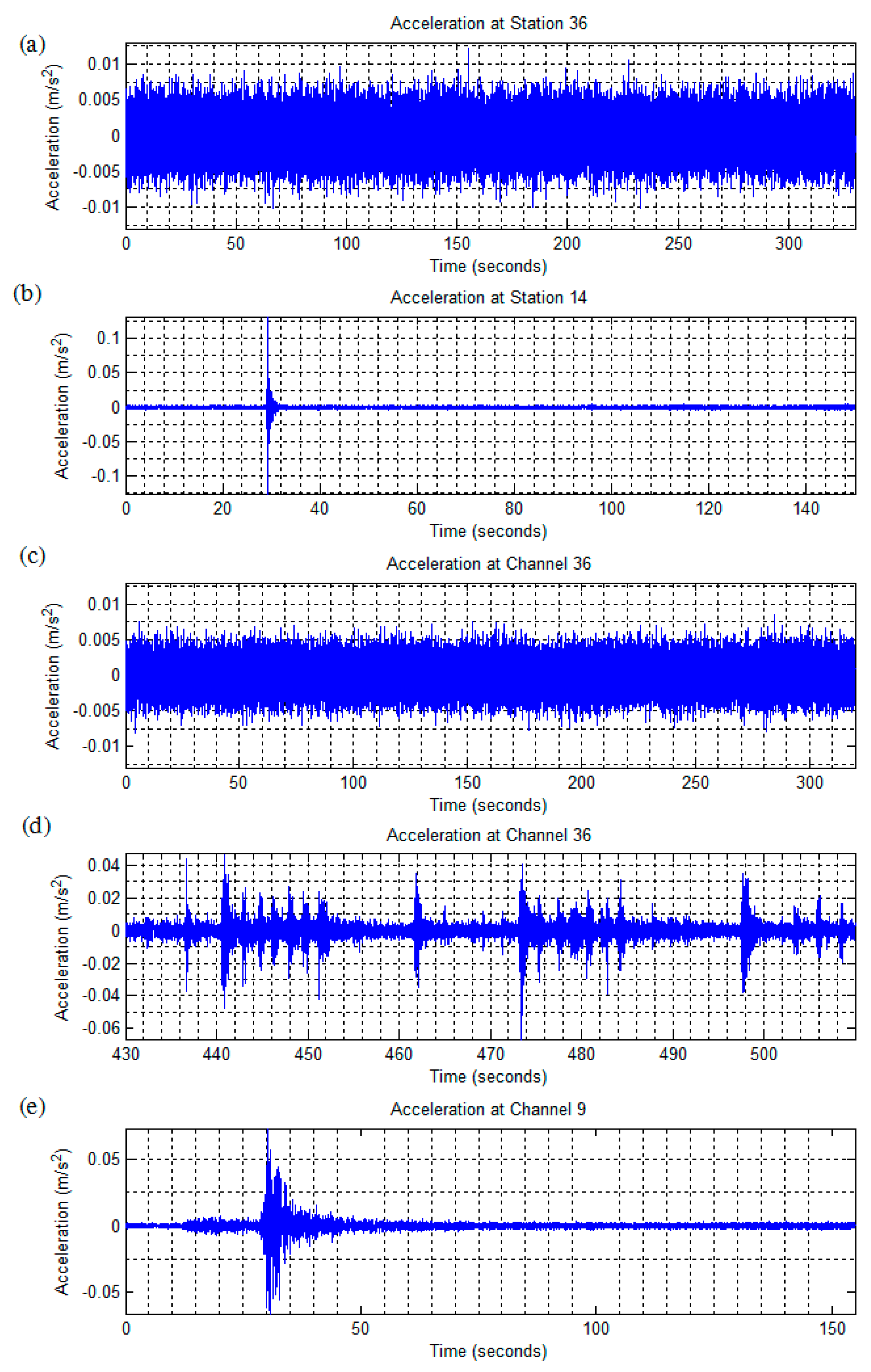
32]. In order to carry out a time history analysis for the 10/16 Hollis Center Maine Earthquake, input earthquakes for EW- and NS directions are calculated using the recorded acceleration data from the following channels:
For the EW direction, Channel 7 is used because we do not have acceleration data from west facades of the building, and for NS direction average of the two related accelerations are used for the center of the mass because SLMM is a lumped mass model. In Equation (28) the root-mean-square errors are also calculated using the average of the two related displacements. Newmark-β time-step integration method has been used in the simulation for the SLMM. The incremental governing equations of motion for the structural system are expressed as:
where
and
are reduced order mass, damping, and stiffness matrices of the 21-story building,
is incremental response vector, and
and
are loading vector for the earthquakes, ground acceleration increment, respectively.
In order to update each value of mass and stiffness matrices of each story, a vector of n physically significant parameters is to be updated:
in which
ri is the
i-th rate of the
i-th parameter. For this structure, it has four parameters for each mass matrix (i.e.,
m11 =
m22 =
m33,
m44,
m55 and
m66) and nine parameters for each stiffness matrix (i.e.,
k11,
k22,
k33,
k44,
k55,
k66,
k24 =
k42,
k15 =
k51 and
k45 =
k54) of each story and total 273 parameters, which is n in Equation (31). The updated parameters from the multi-objective optimization is used to calculate new mass and stiffness values in each story as follows:
where subscripts
ui, and
oi are the updated and original mass and stiffness values, respectively. Mass values are increased from the Equation (32) to consider nonstructural components and stiffness values are decreased due to damage and deterioration of materials.
In order to update modal properties, the natural frequencies from the earthquake ground motion (Maine) are used instead of the average values from various vibrations from the
Table 2 for better synchronization in time histories of acceleration at top story. The 2nd torsional frequency, 5.05, is also taken from the average value because the frequency was not achieved from the earthquake as shown in
Table 2. Updated structural stiffness and mass information are achieved as shown in
Table 5 and
Table 6 using the advanced multi-objective optimization in terms of measured natural frequencies and acceleration time history. The initial masses were underestimated in the SLMM because contributing live load and the superimposed dead load masses were not considered. In order to consider the mass of non-structural members such as interior partitions and any additional masses due to heavy experimental equipment, the increment of mass values in each component of mass matrix in each story is assigned as maximum 30% of the original self-weight with the resolution of 1%. The stiffness of each story is also updated with the reduction of a maximum of 50% of the original SLMM to consider degradation of stiffness due to strong winds and minor earthquakes during last 50 years, which is based on previous research done by Skolnik et al. [
12]. The Green building was constructed in 1964.
The discrepancy of the natural frequencies between initial simplified FE model and measured data are significant as shown in
Table 7. It is reasonable because the contributing live load and the superimposed dead load masses were not considered as we mentioned in the previous paragraph and simultaneously the stiffness of the structure has been gradually reduced during 50 years due to strong winds in Boston area and material degradation. Similar result was reported by Bradford et al. [
33]; the natural frequencies of the Millikan Library building, which is also a concrete structure, at Caltech (Pasadena, CA, USA) have been reduced more than 30% during 30 years due to degradation of strength of materials and strong and minor earthquakes. From the updated stiffness values in
Table 6, we found that the torsional stiffness values and coupling stiffness values are more reduced compared to NS or ES directional stiffness values, which may be due to exposure to strong winds during the last 50 years.
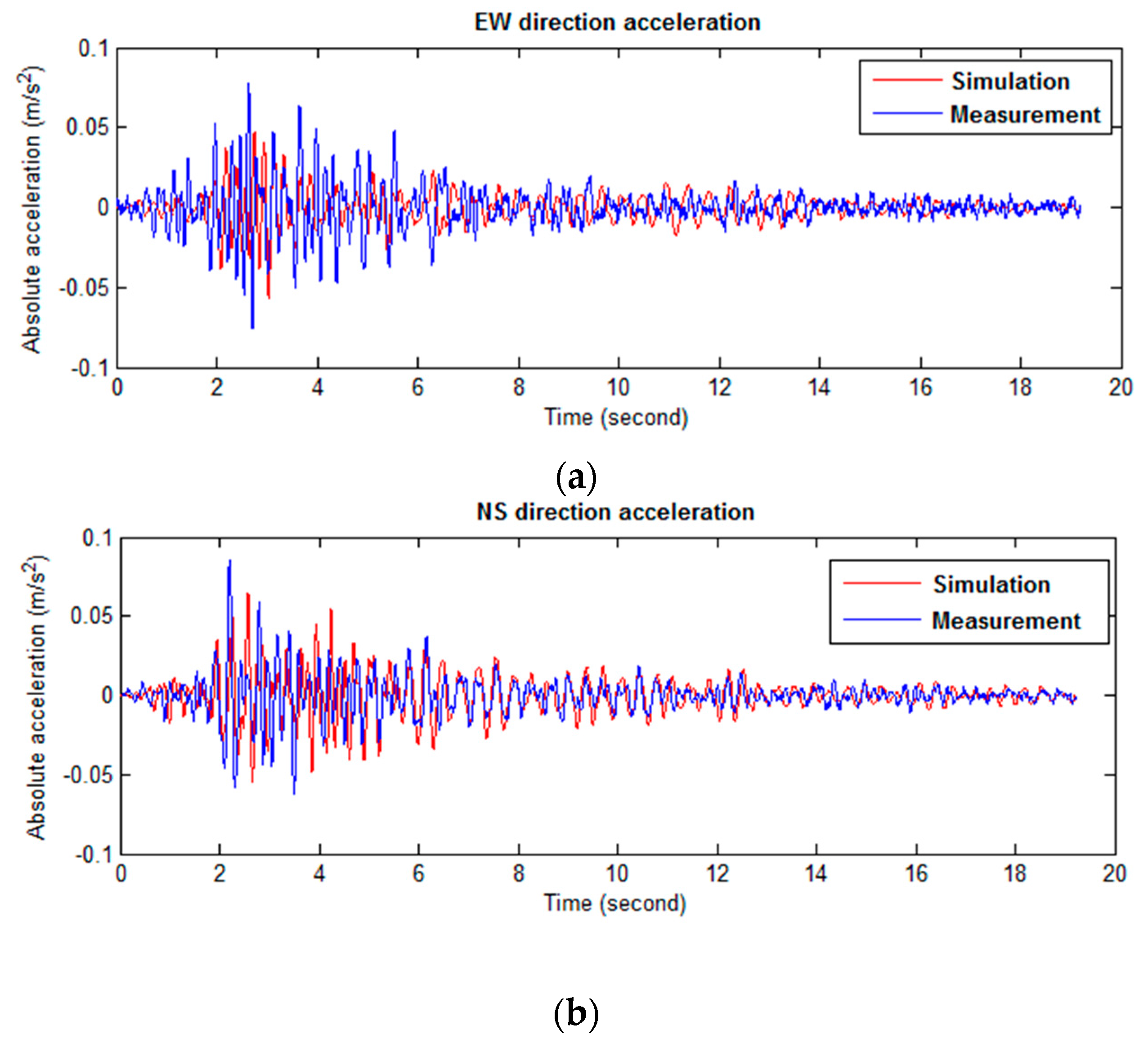
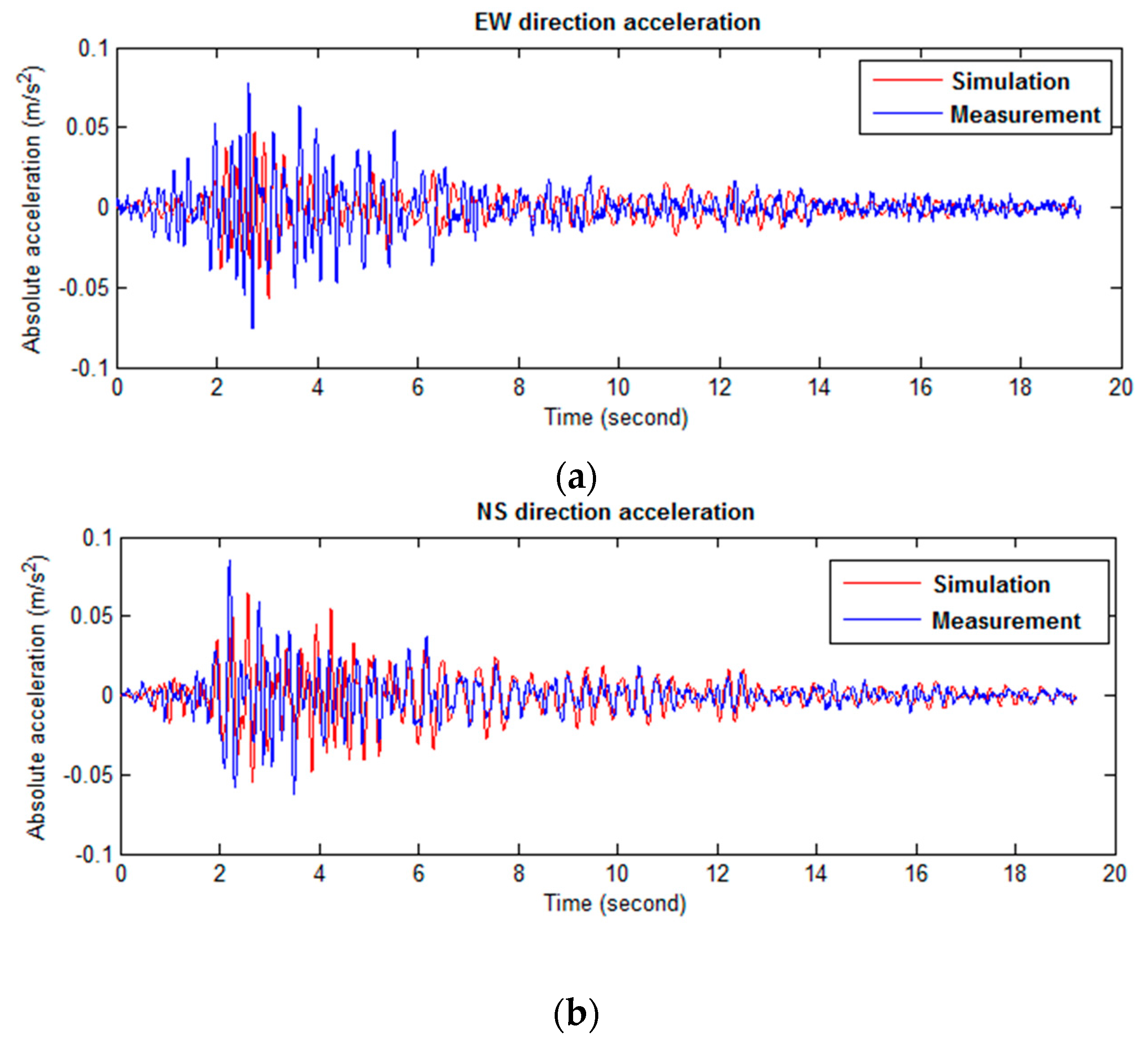
The predicted response of the updated SLMM to the 10/16 Hollis Center Maine earthquake in
Table 7 is also compared to the measured vibration data, as shown in
Figure 19. The overall responses show good agreement each other. Especially the NS directional responses are quite well matched with each other, even though it is the response of the top story which is the result of the accumulated responses of lower stories. It means that the discrepancies are also able to be accumulated. In terms of that viewpoint, the achieved result is quite satisfactory, but there are discrepancies with respect to the amplitude of the EW direction may be the result of the inaccurate earthquake input for that direction. The assumed damping ratios and simplified model, which is not able to consider higher modes of the building with accumulated errors due to high-rise building, may cause discrepancies in time history responses as shown in
Figure 19. Thus, as future work, in order to more precisely predict structural behavior of the building, we will include parameters of damping ratios for better synchronization, nonlinear Kalman filtering based system identification method could be used to predict structural properties such as stiffness and damping for each DOF and also to predict structural responses when it is subjected to future random earthquake ground motions.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}