The traditional RHS reconstruction method consists of three procedures: envelope detection, segmented Hilbert transform, and amplitude compensation. Envelope detection can eliminate the influence of direct signal and obtain one quadrature component of RHS represented by
[
22,
24]. Firstly, we will give the detailed derivation of the model of the signal at the output of the envelope detection. Disregarding the interferences and noise, the complex signal at the input of the amplitude detector,
, can be presented as a sum of the direct signal and the target return:
where
,
is the carrier frequency,
is the amplitude of the direct signal and
is the amplitude of the target return.
,
,
and
denote the Doppler phase, the initial phase of direct signal, the initial phase of target return, and the scatter phase, respectively. Applying the condition that
, which is true for a far-field forward scattering [
22], we can calculate the amplitude of
as :
where the second-order Taylor expansion was used for simplification. Actually,
is the output of the amplitude detector. Since the initial phase
is difficult to know, we can consider the expression
as either quadrature component of RHS. Though the output of the amplitude detector is not exactly equivalent to the quadrature component of RHS, the error introduced by approximation can be ignored for a target in the far-field of forward scattering.
Then, the segmented Hilbert transform can correctly reconstruct most of the other quadrature component of RHS, represented by . It should be mentioned that the denotation and are not exactly the output of quadrature demodulation and should not be confused. Finally, the amplitude compensation is applied to reconstruct the mainlobe RHS to acquire a whole RHS. Here the mainlobe refers to the central part of RHS that occupies most of the signal power. For far-field scattering, the mainlobe RHS refers to the part of RHS between the first nulls of the RHS envelope. The novel method proposed in this article mainly improves the traditional method in two parts: segmented Hilbert transform and mainlobe RHS reconstruction.
3.1. Improved Segmented Hilbert Transform
Hilbert transform is the basic technique to reconstruct a complex signal from its real part. However, the Hilbert transform of the real part of every non-stationary signal is not necessarily its analytic signal. Actually, Bedrosian’s theorem can be applied to explain the prerequisite for the Hilbert transform as follows [
25].
If a real amplitude-modulated and frequency-modulated signal
satisfies the conditions that the spectrum of its envelope is inside the region
while the spectrum of
is outside the above region:
the analytical signal of
has the form presented in Equation (10) as:
where
denotes the Hilbert transform.
Since the Doppler of the FS signal is zero when the target is crossing baseline, the above condition is obviously unsatisfied. If directly taking the Hilbert transform of
, the obtained signal will not be the RHS. To solve this problem, the segmented Hilbert transform is proposed to reconstruct
in [
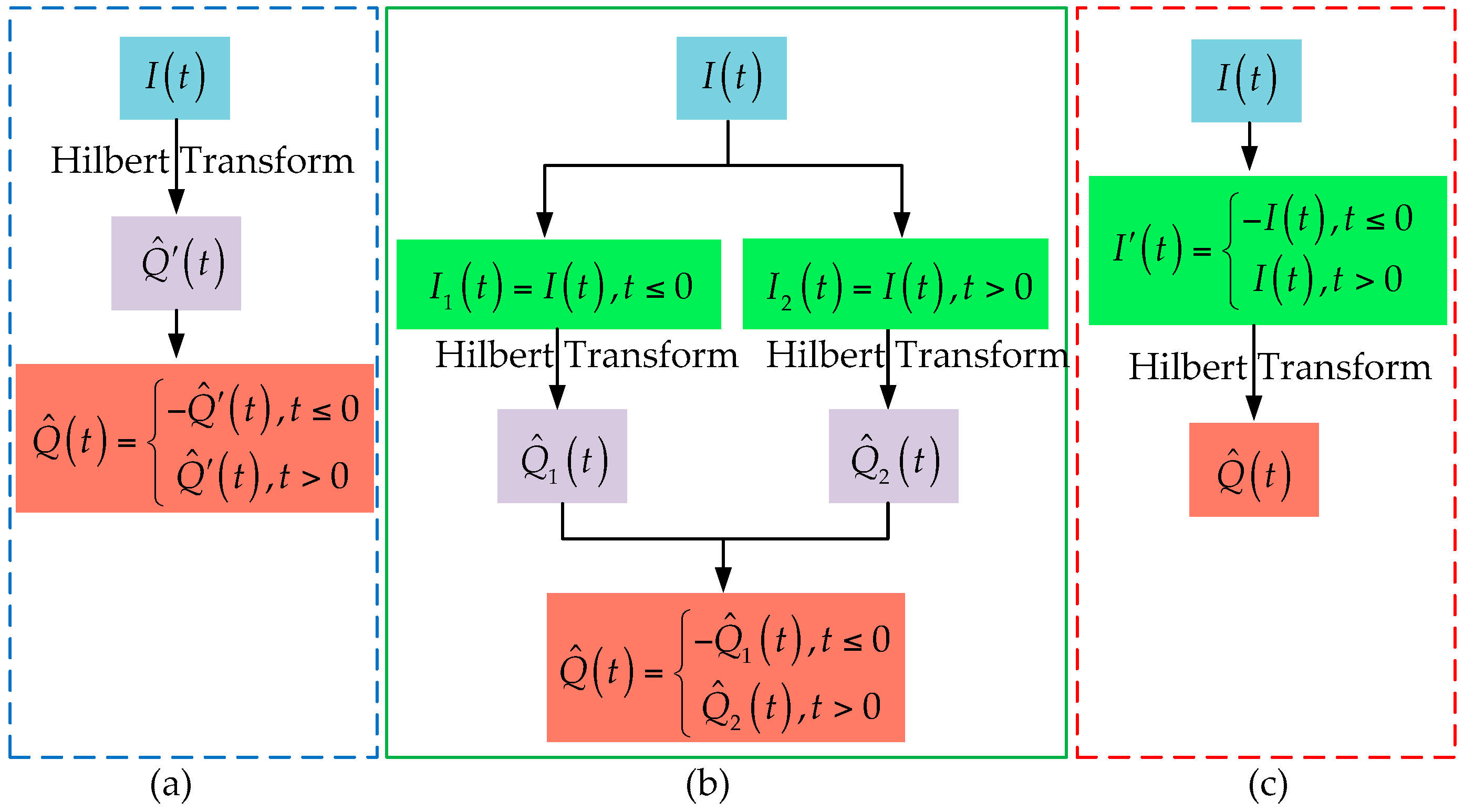
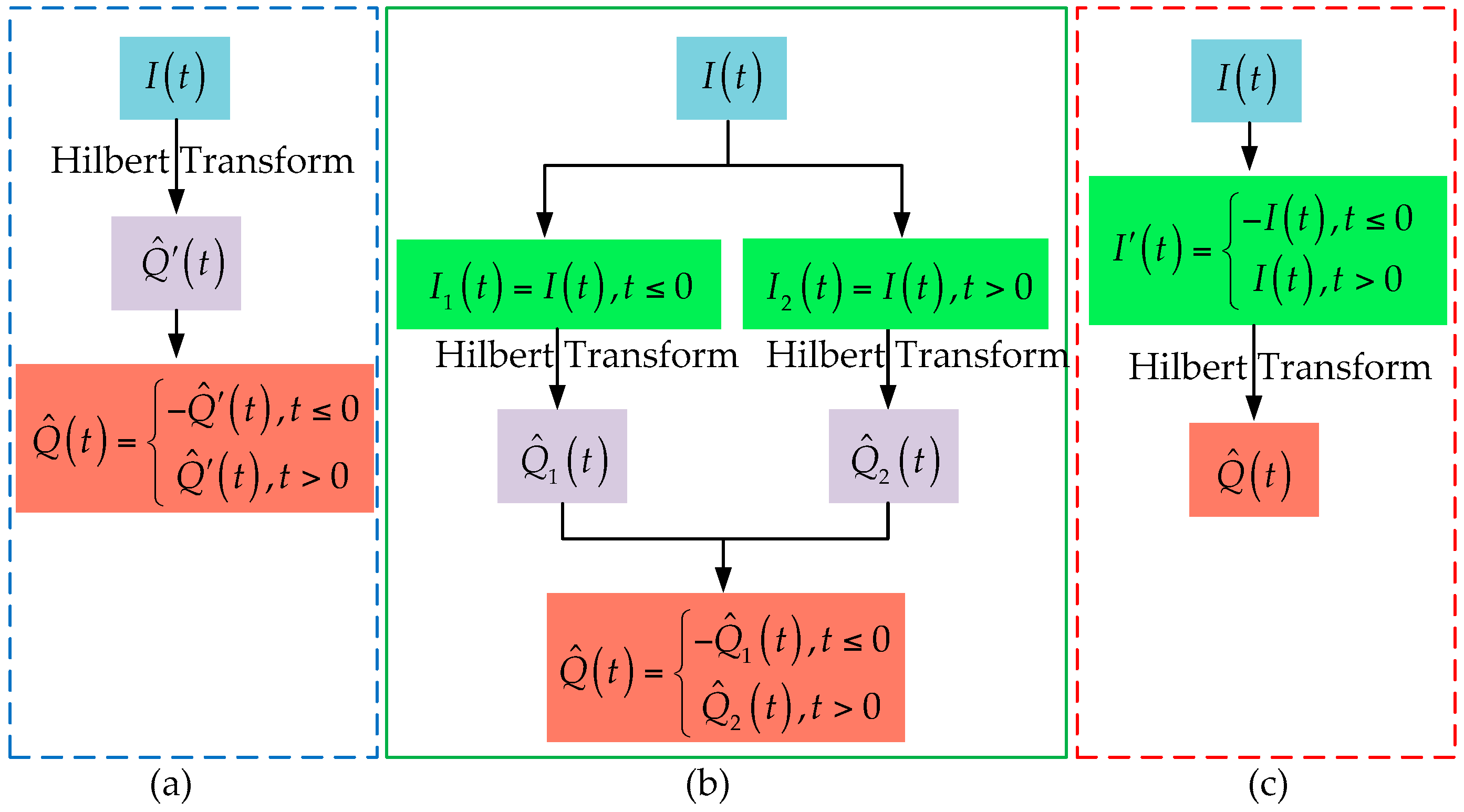
24] and two different implementations are discussed. In the first implementation, the Hilbert transform is taken before the segmentation processing and sign change processing. While in the second implementation, the Hilbert transform is taken between the segmentation processing and sign change processing. In fact, there is a third way of segmented Hilbert transform which is to take the Hilbert transform after segmentation processing and sign change processing. The corresponding illustrations are shown in
Figure 4. For the purpose of convenient expression, we will refer to the above three ways of Hilbert transform as Approach 1, Approach 2, and Approach 3, respectively, in the following paragraphs.
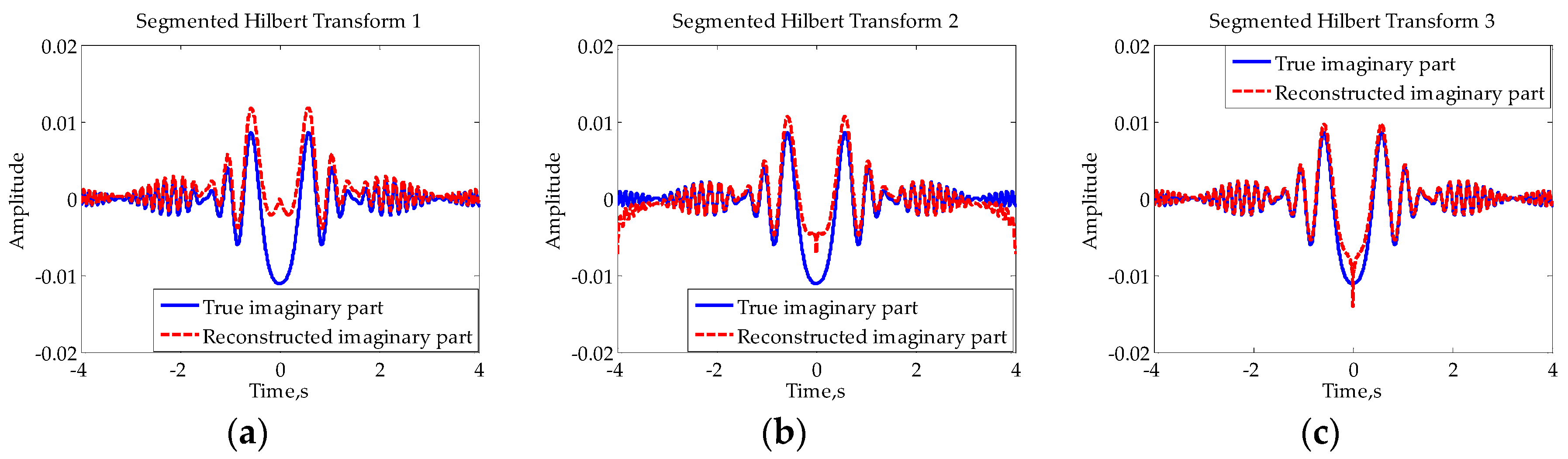
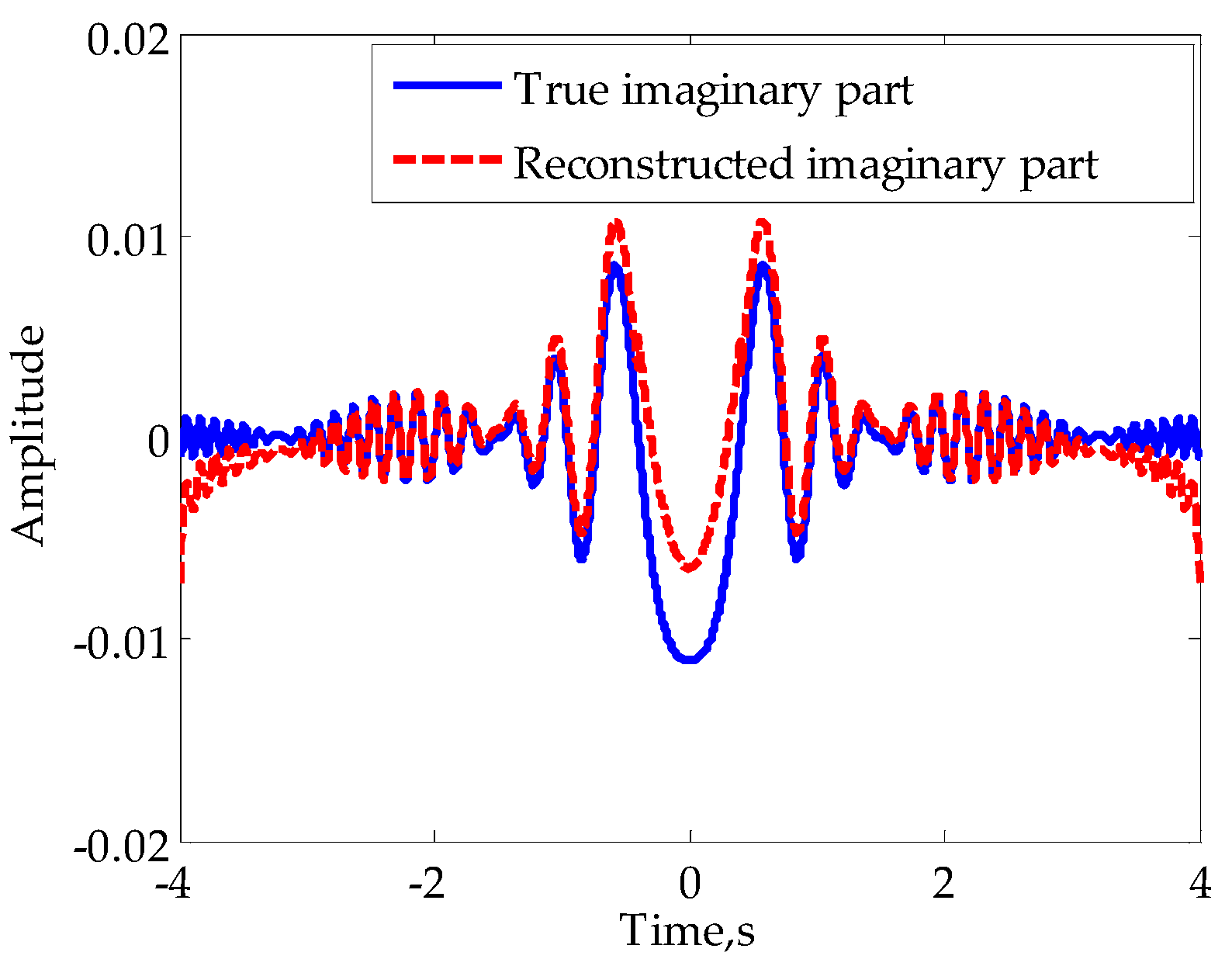
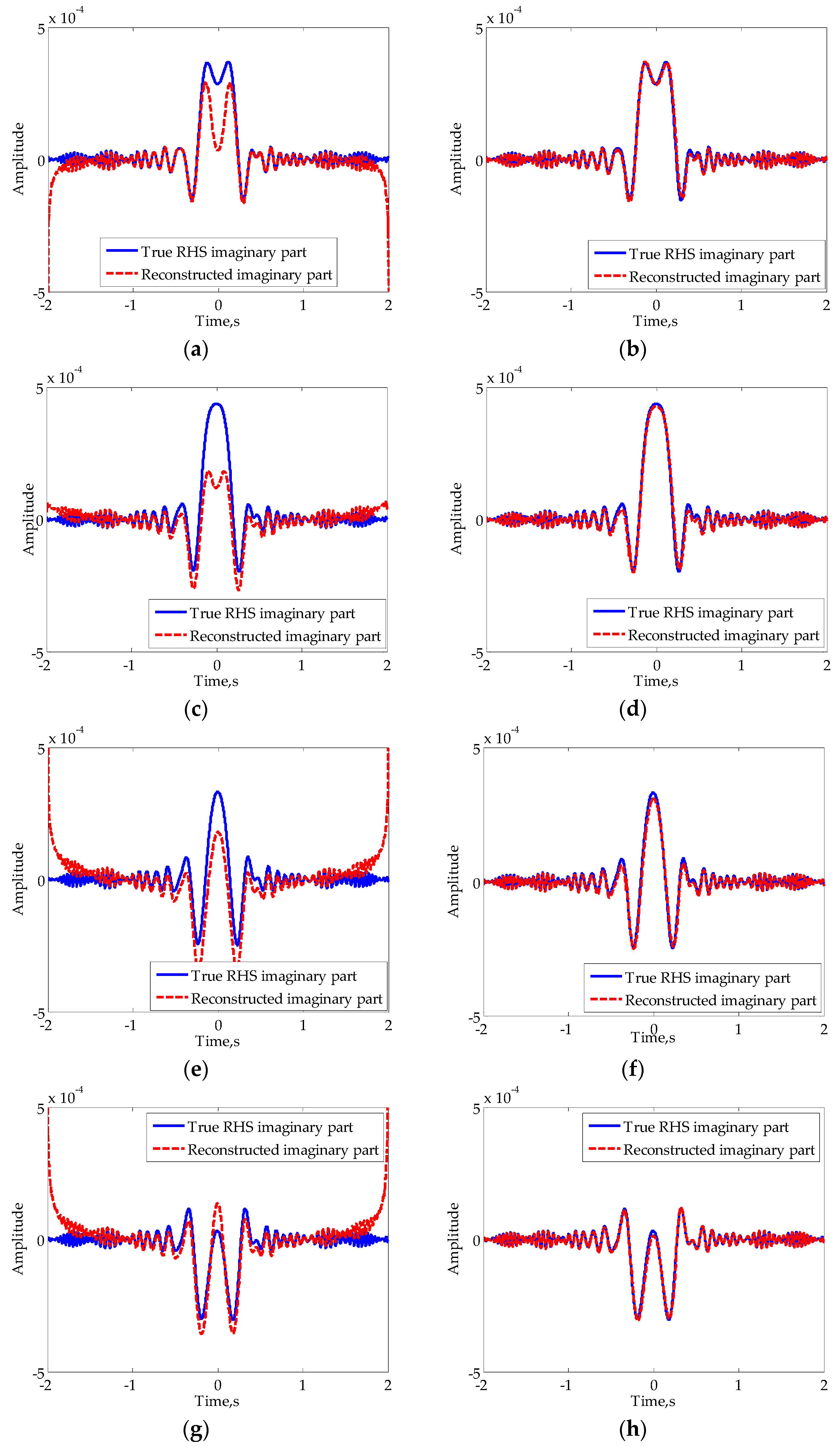
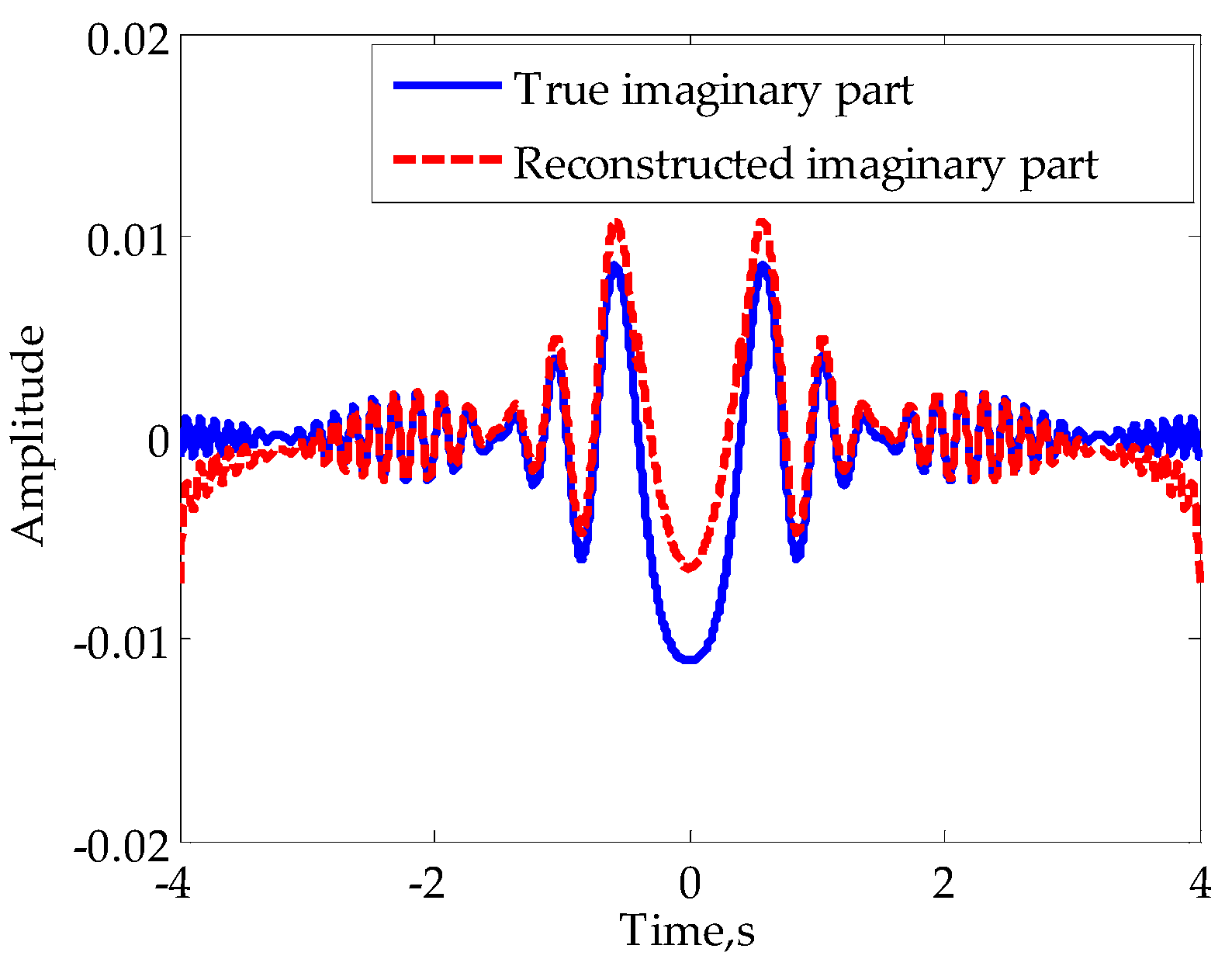
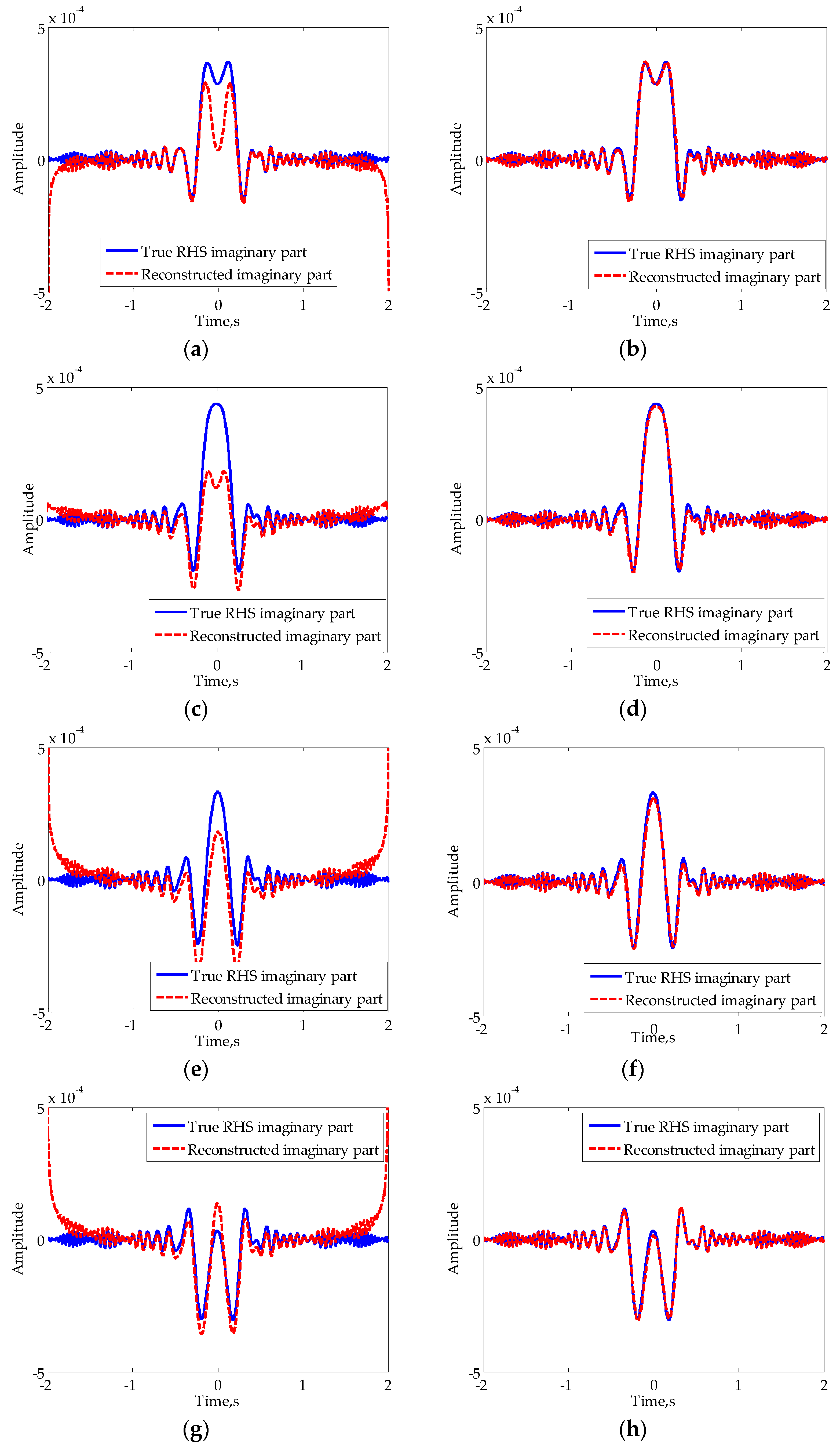
The essential difference between the three methods is the relative position of the Hilbert transform to segmentation processing and sign change processing: before, between, and after. For comparison,
Figure 5 shows the reconstructed imaginary parts of the signal in
Figure 2d using the above three methods, in which the broken lines denote the reconstructed imaginary parts while the solid lines denote the true imaginary parts.
Overall, all of the reconstructed RHSs have obvious distortion at times when Doppler is close to zero. There are also electric mean shifts in the first two cases, which means that local means of signal deviate from zeroes. One has obvious electric mean shift at low frequency while the other has obvious electric mean shift at high frequency. However, the RHS reconstructed using the novel method (Approach 3) represents no obvious electric mean shift. The reason for this phenomenon is that the frequency of the constructed input of the Hilbert transform is not zero at the crossing time, which meets the conditions for the Hilbert transform to a certain extent. In [
24], only the electric mean shifts at low frequency are considered and Approach 2 is considered to be a preferable choice. Obviously, Approach 3 should be the best choice if all the three approaches are considered.
3.2. Mainlobe RHS Reconstruction
The traditional method for the reconstruction of mainlobe RHS is based on quadratic polynomial fitting. With the assumption that the initial phase of RHS is zero and
is the real part of RHS,
can be approximated as
when
is close to zero. However, according to the measured data of FS signal appearing in published papers [
3,
4,
5,
6,
12],
is not necessarily the real part of RHS with zero initial phase. On the other hand, the expression of Equation (3) also indicates that the initial phases are different for different system parameters. Therefore, if the quadratic function fitting is used to reconstruct
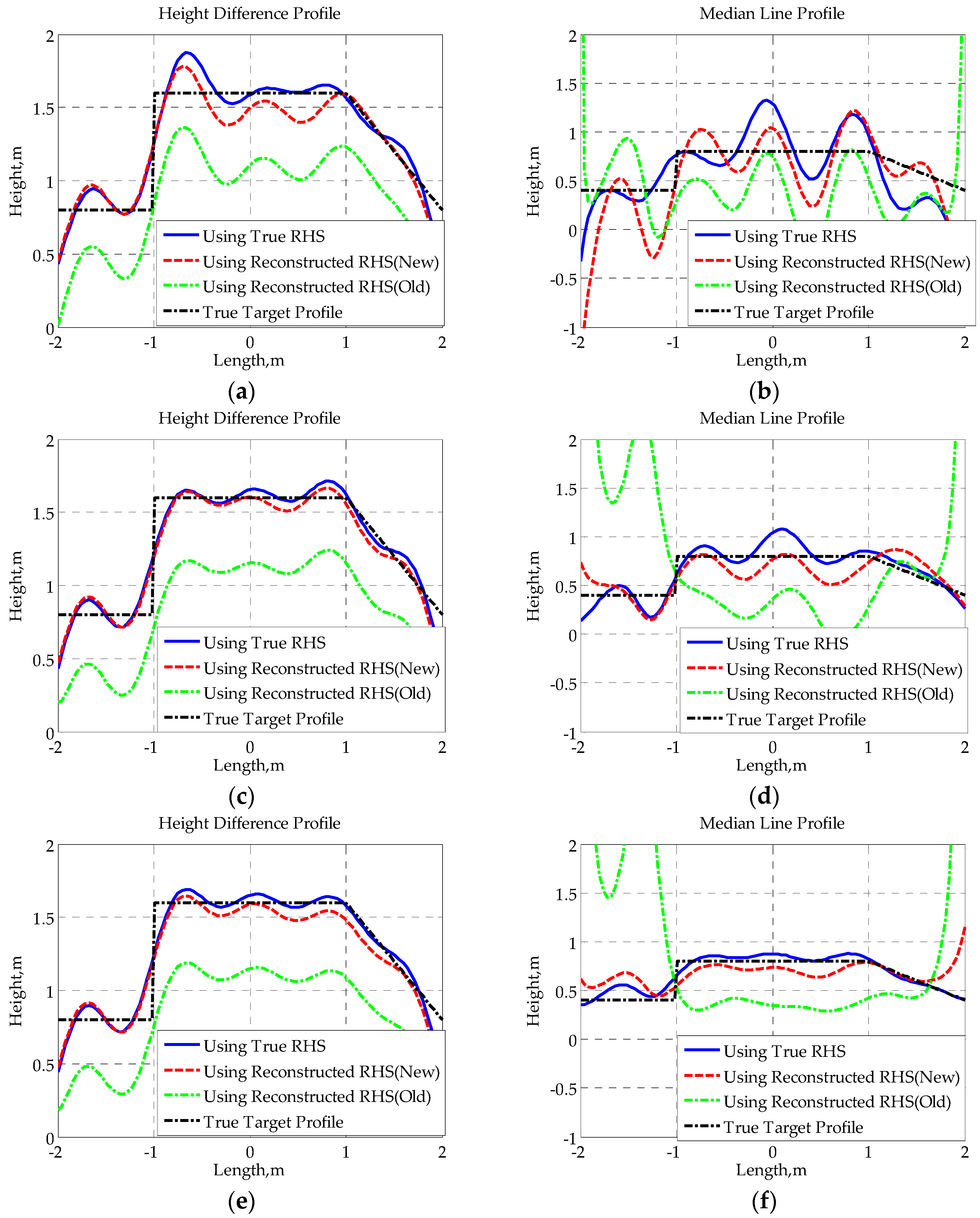
when the assumption is not satisfied, a distortion is inevitable. We reconstruct the mainlobe RHS of the signal in
Figure 5b using the method in [
24] and show the result in
Figure 6. It can be indicated that there is further room for the improvement of the reconstruction of mainlobe RHS.
Actually, we can introduce some additional prior information to assist with the reconstruction of
. Regardless of the scattering phase in the case of far-field diffraction, the RHS can be expressed as:
where
is the envelope and
is the initial phase. Thus, the
obtained by envelope detection is:
Considering the phase, there are two unknown parameters in
, which are the Doppler variation rate
and the initial phase
. If the envelope
is known, we can obtain the estimates of
and
by matching
with constructed matching signals in the least square sense, and hence restore
. In fact, however, as the envelope
is unknown, parameter estimation can be only achieved under the assumption that
is constant [
4]. Simulation proves that the estimated
and
under this assumption have certain deviations from the true values and the reconstructed RHS’s are not accurate.
According to the above analysis, the estimation of the
in mainlobe is the key to RHS reconstruction. From Equation (12) it can be seen that when
,
, we have
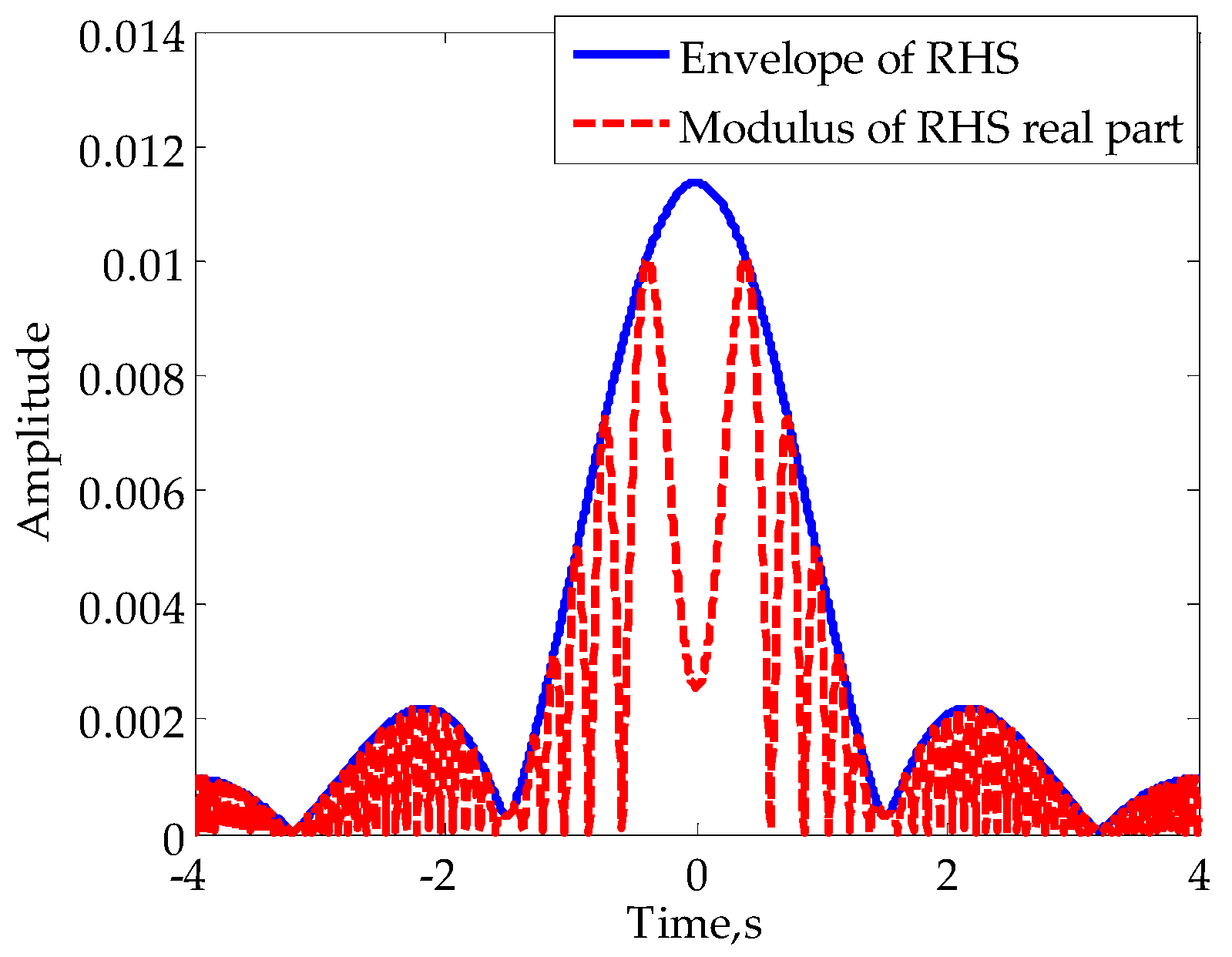
. That is to say, the modulus of
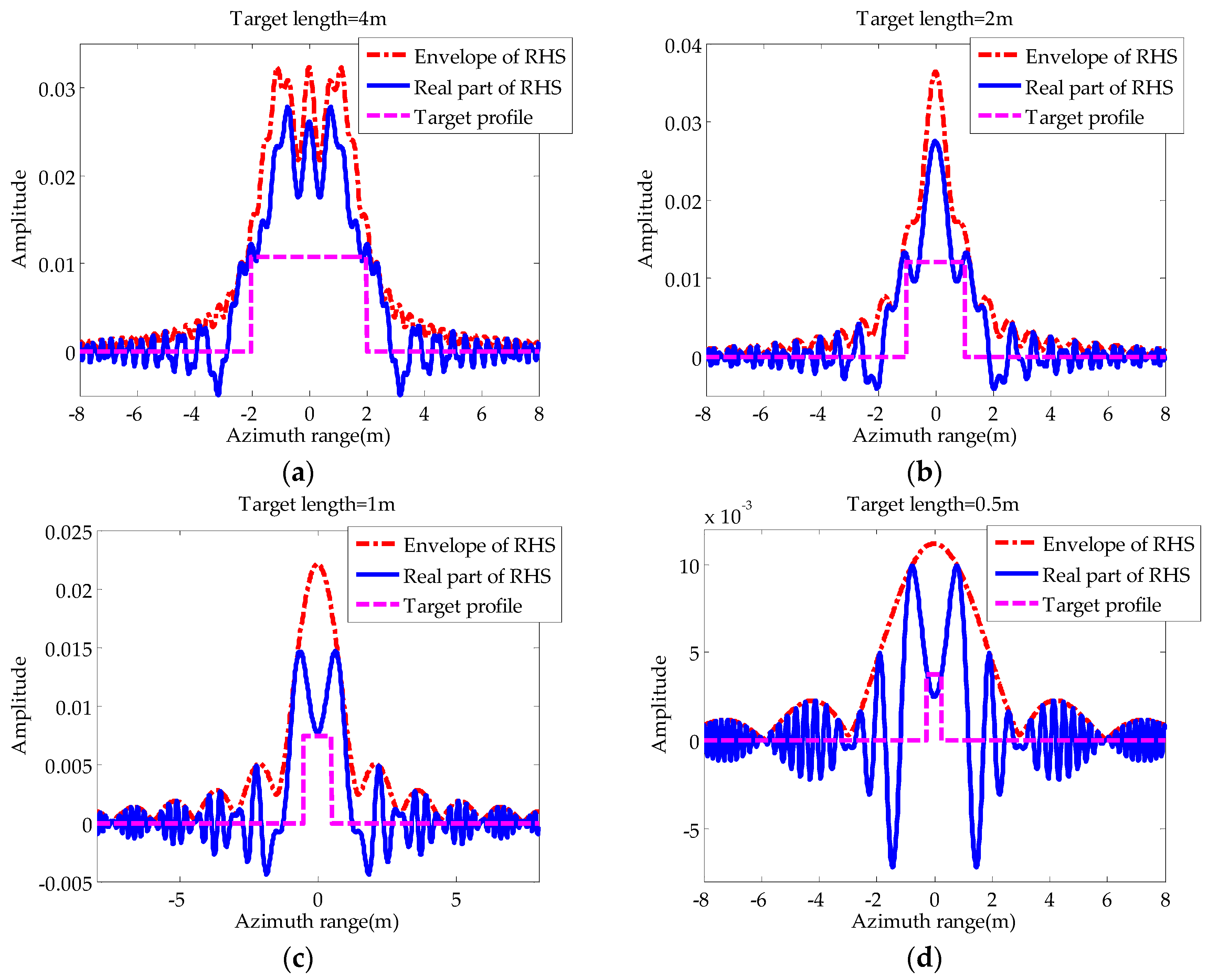
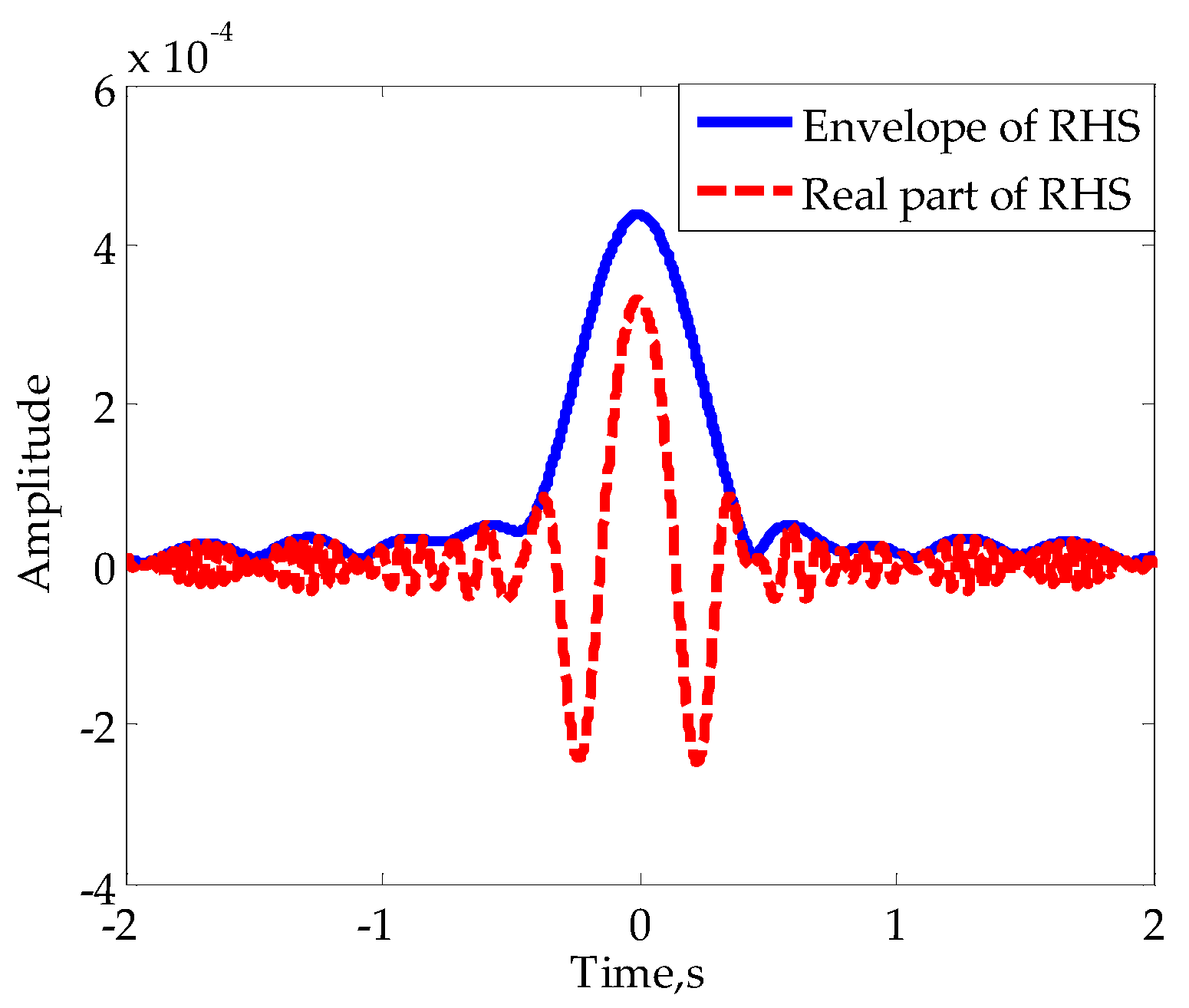
is equal to the amplitude of RHS in some specific moments. In particular, when the target is in the far-field, these moments are very close to moments when
reaches its extremums. Therefore, if we can obtain
M extremums of
in mainlobe (zero moment excluded), expressed as
and
, it is appropriate to consider
as
M non-uniform samples of
. For illustration, the envelope (denoted by solid line) and modulus of the real part (denoted by broken line) of the signal in
Figure 3d are shown in
Figure 7.
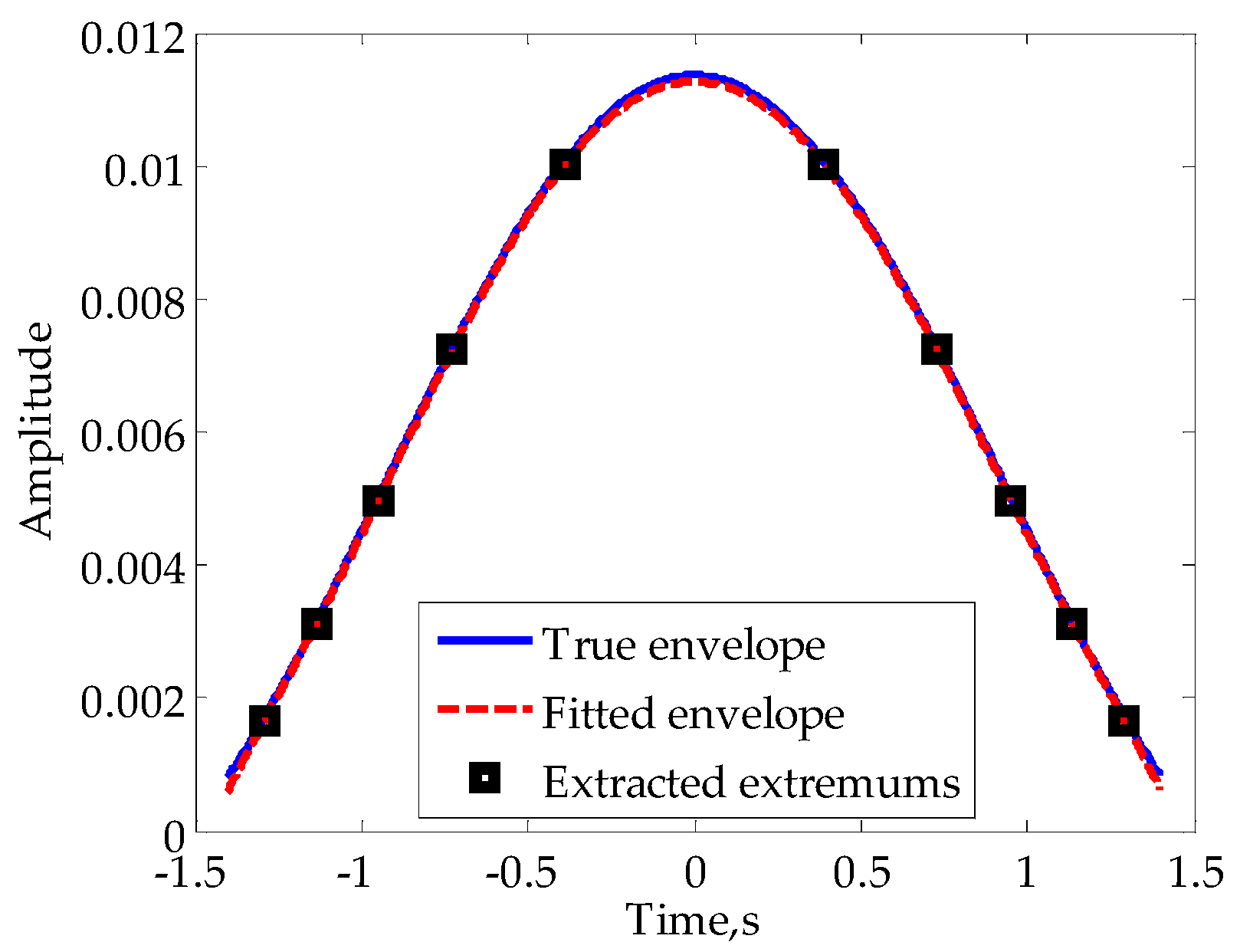
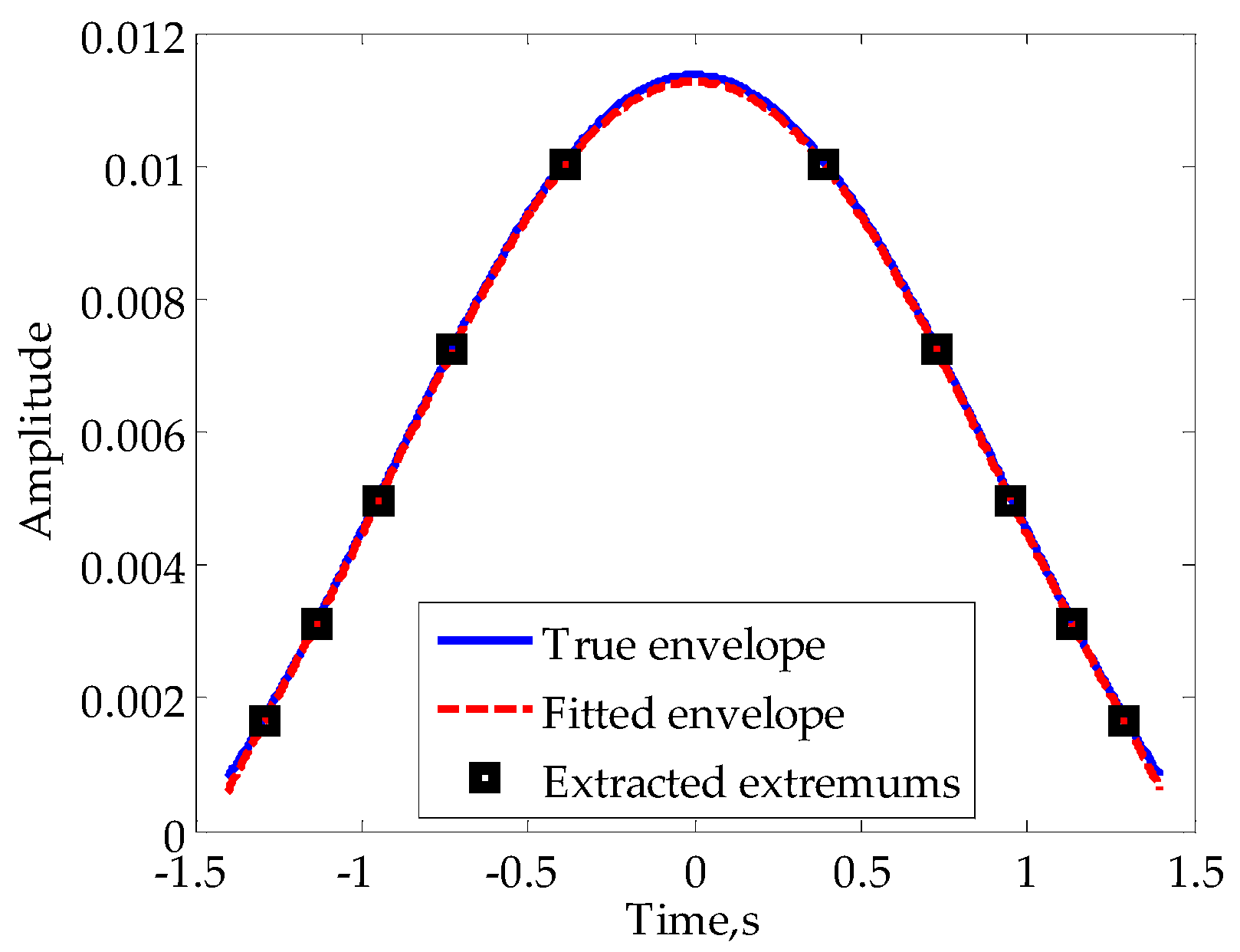
For far-field diffraction, the mainlobe envelope is usually smooth. Thus, we can consider the use of high order polynomial fitting to restore the mainlobe envelope in cases of large
M. For the signal in
Figure 7, we extract the extremums in mainlobe, 10 points altogether, to process a fifth-order polynomial fitting. The corresponding result is shown in
Figure 8, from which we can see that there are minor differences between the fitting envelope and its true value.
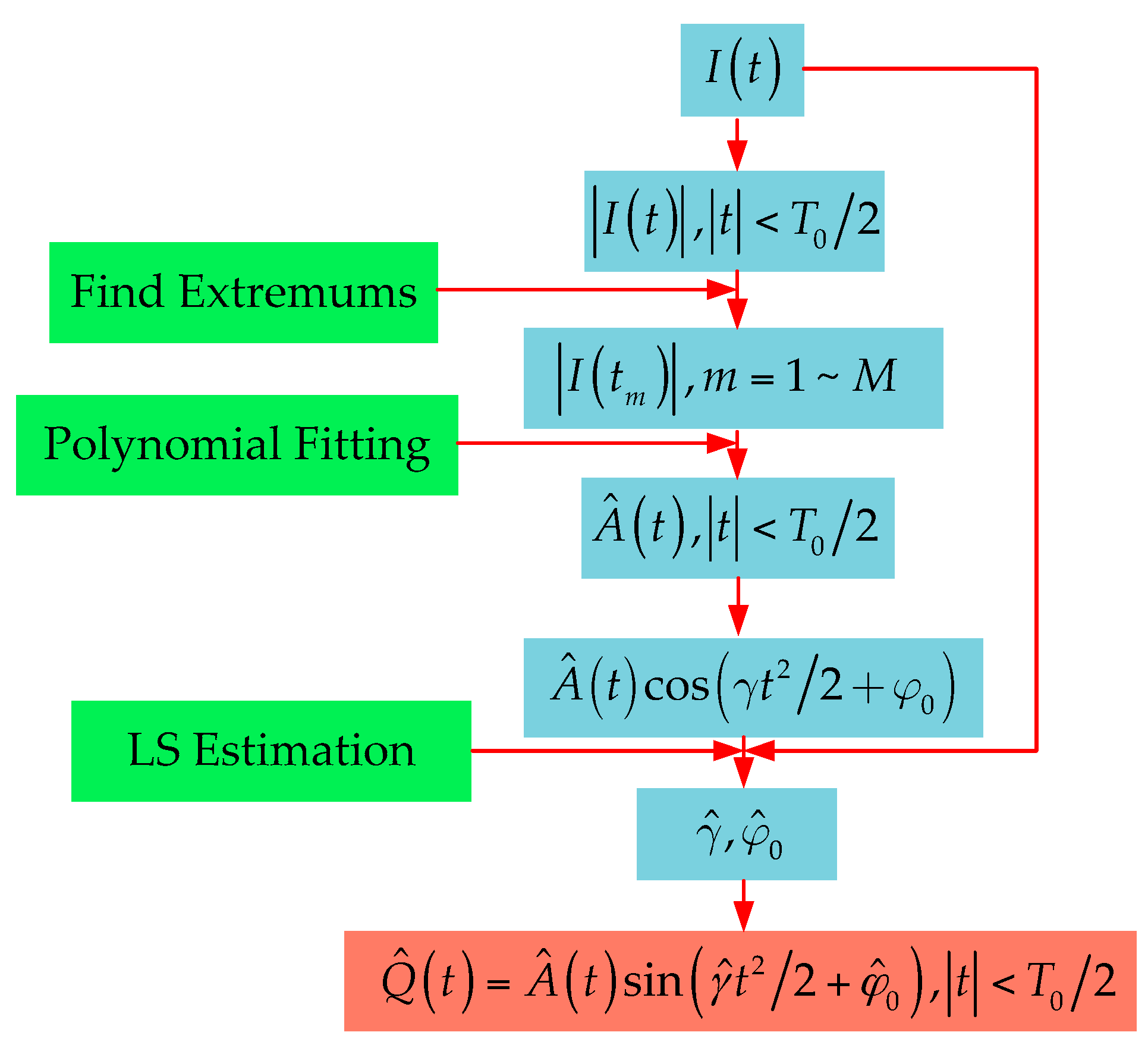
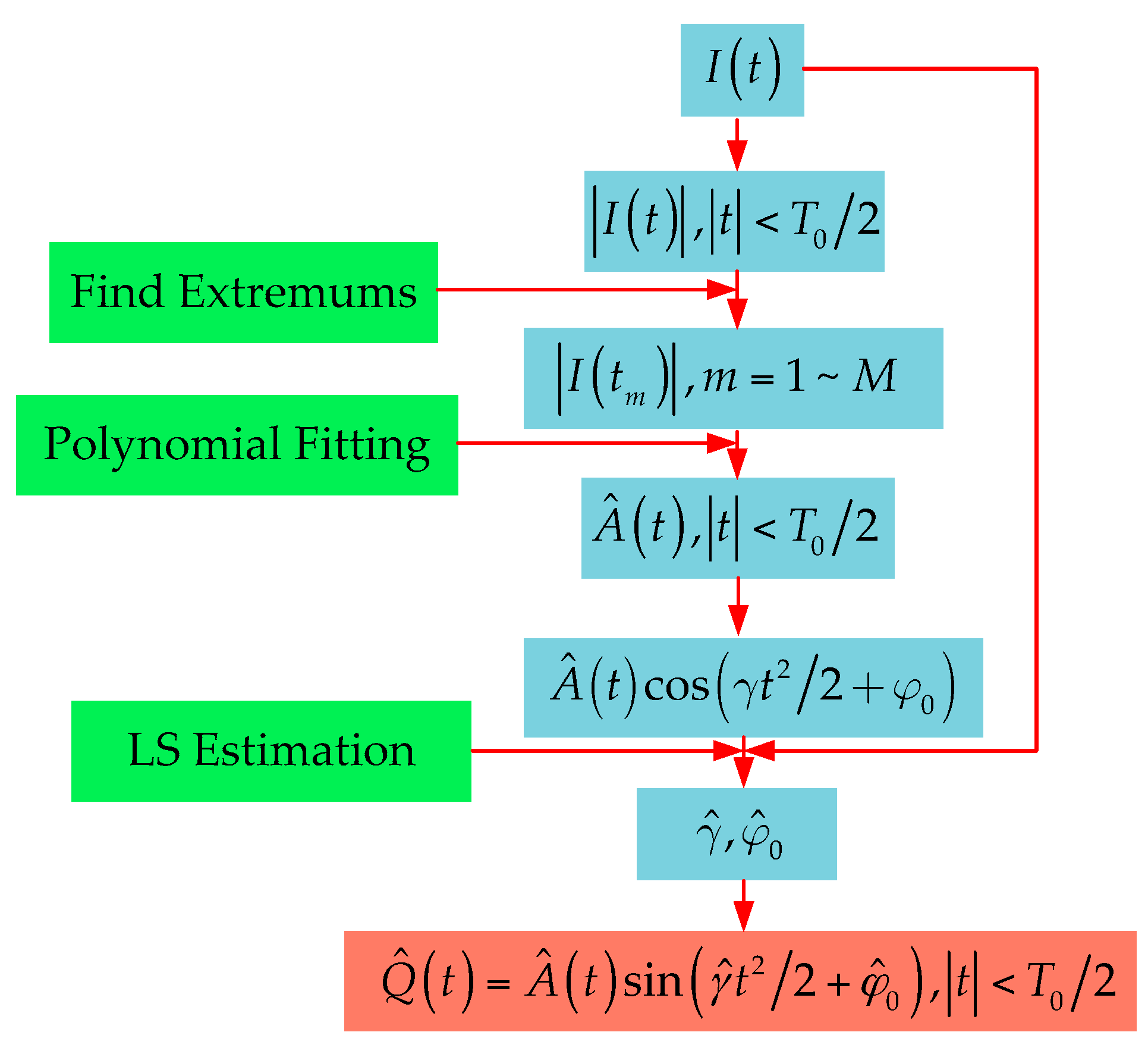
Based on the above description, we present the following method of mainlobe RHS reconstruction, the specific flowchart of which is shown in
Figure 9.
Step 1: Ascertain the range of the mainlobe according to the variation of signal amplitude.
Step 2: Pick the extremums in the mainlobes .
Step 3: Use to fit the mainlobe envelope as .
Step 4: Estimate the signal parameters
and
in the sense of least square error:
where
represents for the time samples in the mainlobe.
Step 5: Substitute
into Equation (11) to obtain the estimate of the imaginary part of RHS:
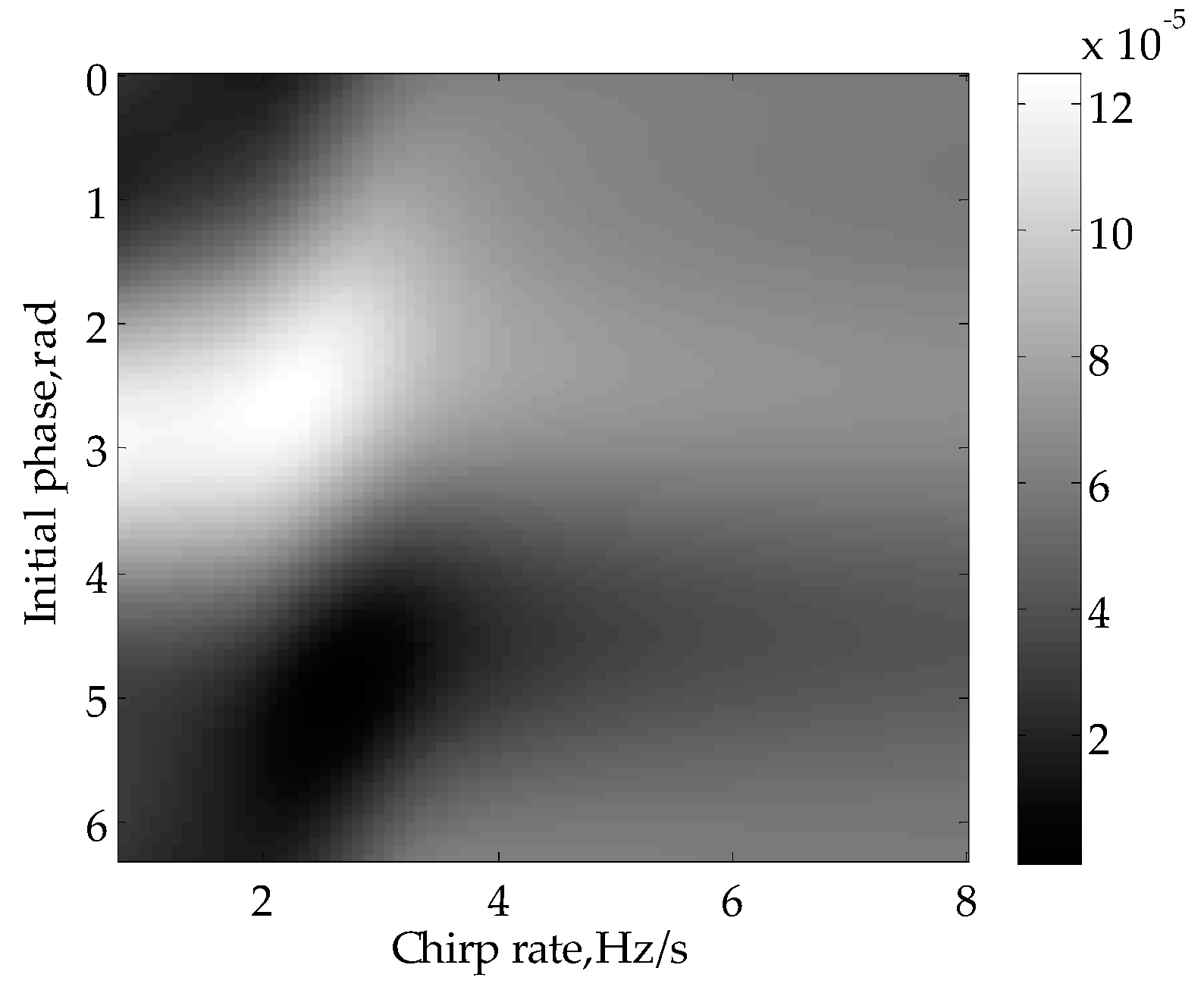
The two-dimensional distribution of mean square errors in estimating the parameters of the signal in
Figure 7 is presented in
Figure 10. The chirp rate and initial phase corresponding to the minimum point are the results of demand. Additionally, the estimated parameters
,
are quite close to the true value
. Actually, the estimated chirp rate can be also used in SISAR imaging. The traditional motion compensation method for SISAR based on contrast maximization [
16] excessively relies on the imaging result, while it is not true for the proposed method of chirp rate estimation.
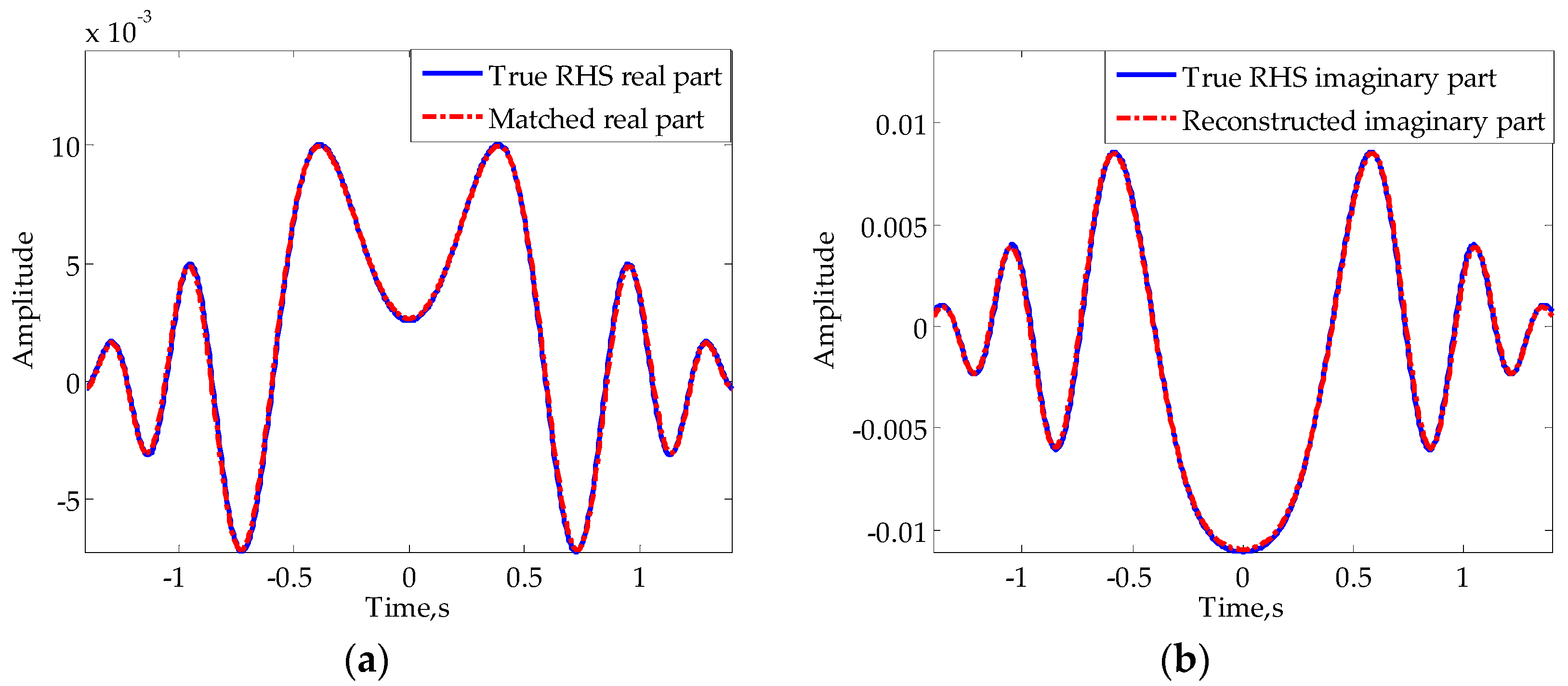
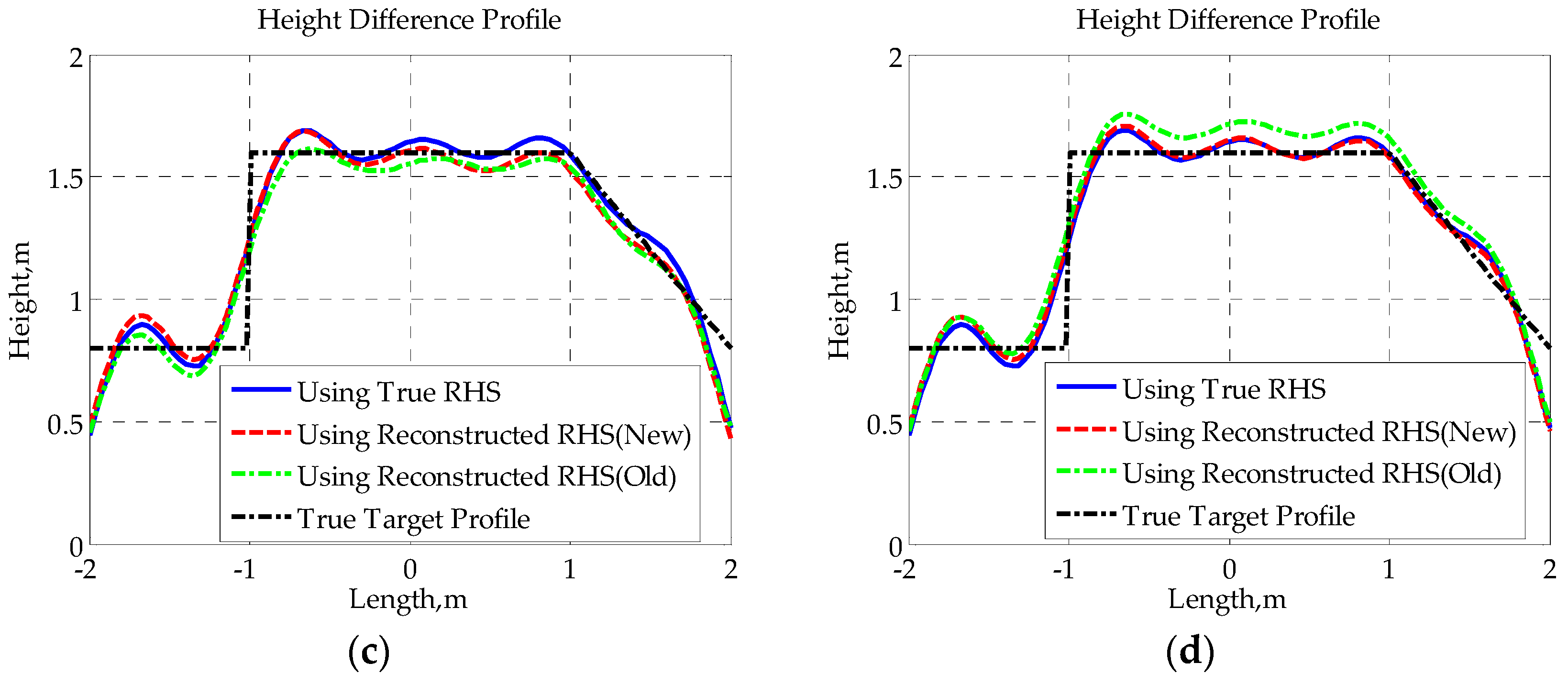
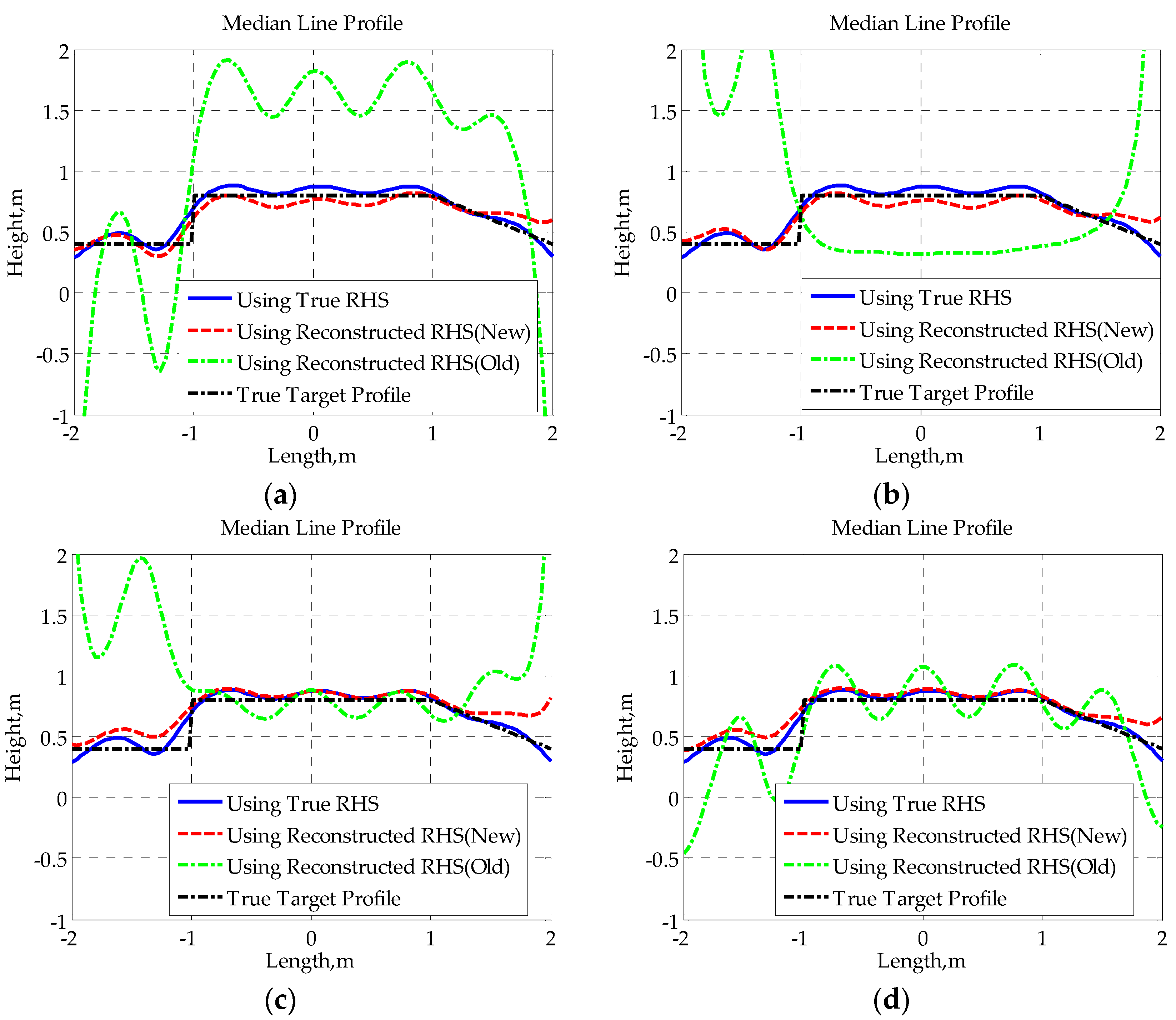
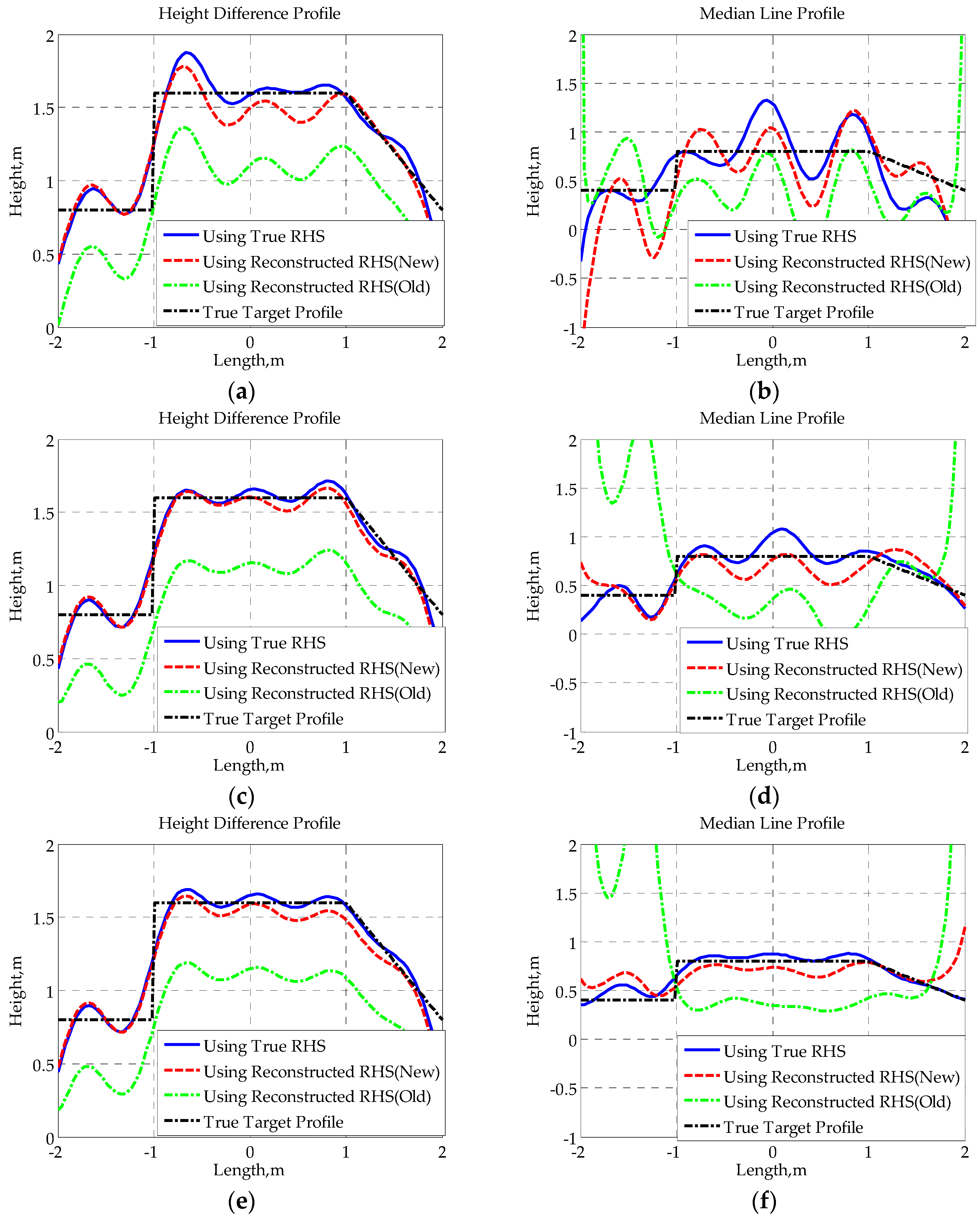
Figure 11 shows the results of real part matching and imaginary part reconstruction of the signal in
Figure 7, which indicate that the matching signal of
and reconstructed
in mainlobe both have high degrees of coincidence with the true values. Using the reconstructed imaginary part of RHS in mainlobe to substitute the distorted part after the segmented Hilbert transform, we can obtain the entire imaginary part of RHS.
3.3. Performance Analysis
According to the above analysis, to ensure the effectiveness and accuracy of the proposed method, it is quite necessary to make sure that the target is in the far-field. In [
4], the Fresnel parameter was used to quantitatively analyze the scattering mechanism, which is expressed as:
where
D is the target’s largest effective size. The scattering mechanism was considered as a far-field diffraction for target distances larger than
. Similarly, the Fresnel number was used in [
24] for the same purpose, written as:
where
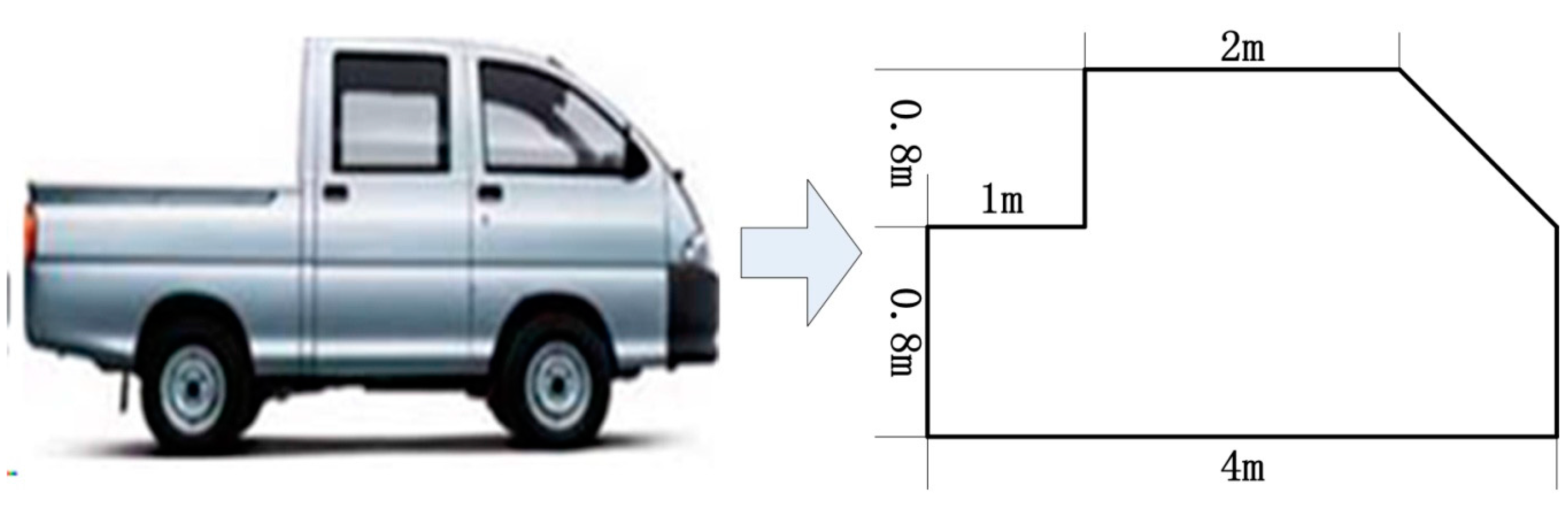
is half of the target size in the direction perpendicular to the baseline. Using this definition, the scattering mechanism was considered as a far-field diffraction under the condition that
. It can be seen that neither definition has given full consideration to the target’s geometry relationship to the receiver and transmitter, thus being not accurate enough.
In order to provide a theoretical basis for the proposed RHS reconstruction method, we will next define a new parameter to differentiate between near-field scattering and far-field scattering in FSR and use it to give the scope of application for the novel RHS reconstruction method.
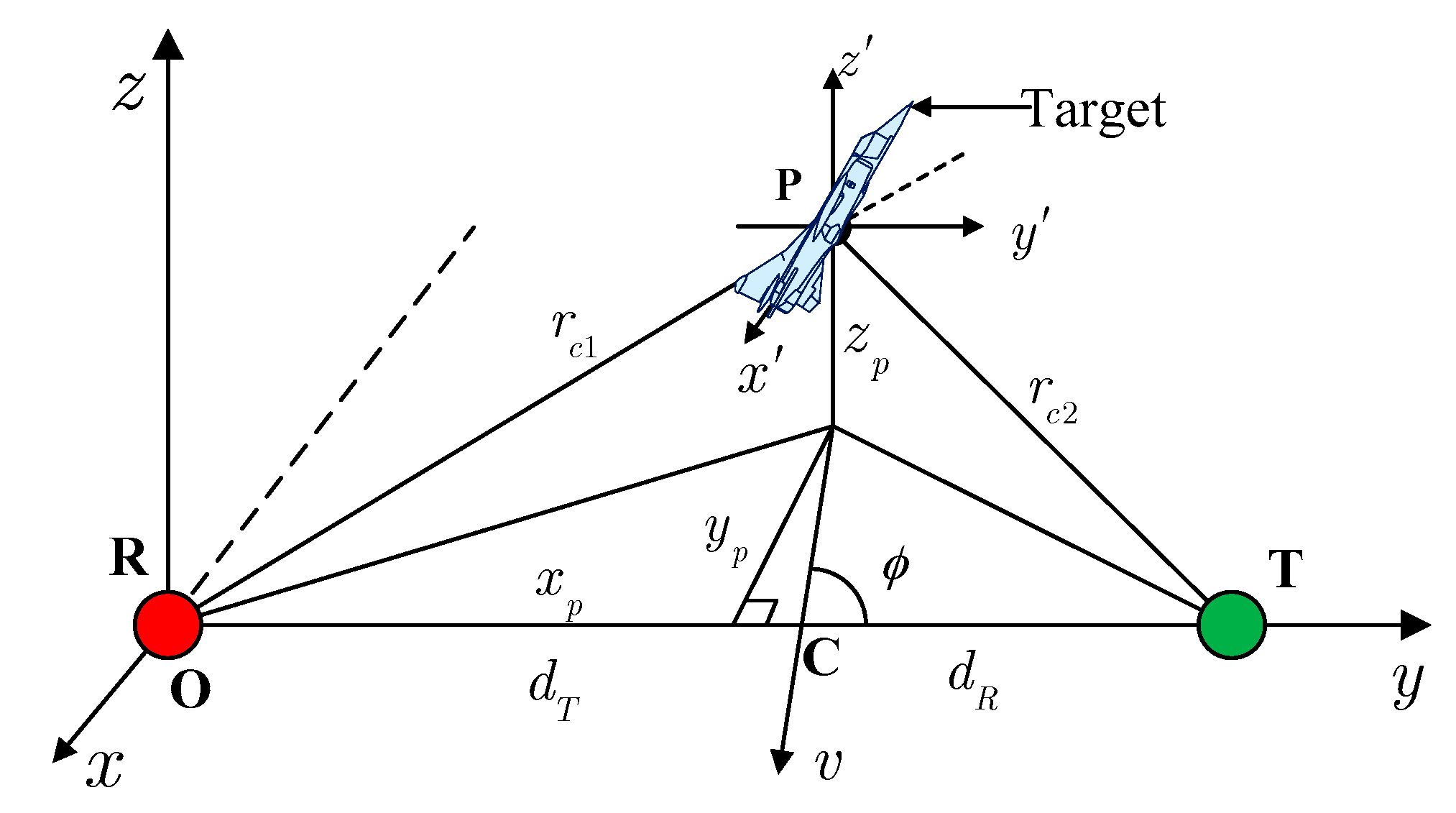
In electromagnetic theory, when the incident wave is a plane wave, the scattering mechanism is considered as a far-field scattering if the secondary radiation wave of the target satisfies the plane-wave approximation. The target’s FS signal can be considered as the coherent superposition of signals scattered from numbers of silhouette elements of the target. Therefore, we can make use of the propagation path differences of signals from different silhouette elements to decide the scattering mechanism. From Equation (2) it can be seen that the FS signal can be approximately expressed by the integral of finite independent scattering sub-signals along the
direction. Each sub-signal can be written as:
Obviously, the propagation path difference of two sub-signals is:
Giving
,
and substituting them into Equation (18), we can obtain the propagation path difference of sub-signals from the center to the edge of the target after simplification:
It can be found that, converting the distance to phase, the linear term of
on the right of Equation (19) has a periodic change as
increases. Therefore, only the case of
is taken into consideration:
Based on the plane-wave assumption, we define a parameter
as the ratio of
to a quarter of the wavelength, which is written as follows:
Compared to the last two definitions, its advantage is the consideration of the relative position of the target to the transceivers so that in certain situations it will be more precise. Apparently, an increasing
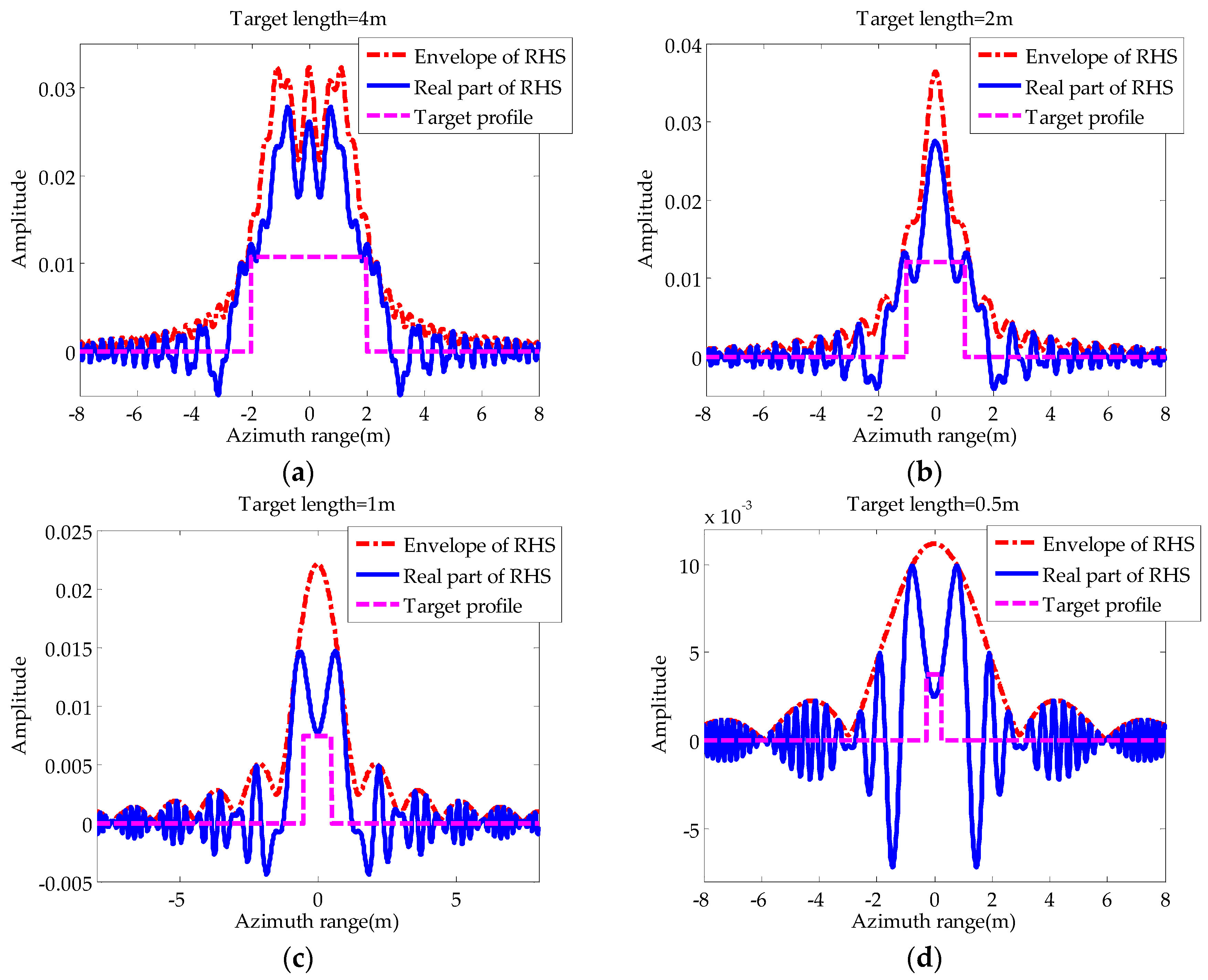
indicates that the scattering mechanism is approaching near-field diffraction. Substituting the parameters in
Table 1 into Equation (21), the corresponding
of each signal in
Figure 3 can be obtained as (a) 5.33, (b) 1.33, (c) 0.33, (d) 0.083. In general, we consider the target in the far-field for small
(e.g., less than 0.1) and in the near field for large
(e.g., greater than 1). To insure the effectiveness of our method, the parameter
needs to be small enough. According to Equation (21), when the wavelength and baseline are fixed,
is mainly determined by the target’s crossing position and trajectory angle
. Obviously, we have large
for
close to 90° or a crossing point near the transmitter/receiver. In fact, the
for
and
is only four thirds of the
for
and
. That is to say, if the RHS for
and
can be correctly reconstructed, there is a large possibility that the proposed method is effective for other situations. Therefore, for the sake of convenience, next we will still analyze the method’s performance under the situation of
and
.
For mainlobe RHS reconstruction, the necessary condition to guarantee its performance is that there should be enough samples of extremums in the mainlobe to acquire a fitting of high accuracy. We may assume that the minimum number of samples is four and that their corresponding times are
. We have the Doppler phase as:
According to the simple rule of quadratic phase change, we have
. According to Equation (5), the mainlobe duration of the first nulls can be approximately expressed as:
These extremums are in the mainlobe on condition that:
Substituting
and Equations (21)–(23) into Equation (24), we can obtain:
Based on the restriction that
, the maximum of
is 0.25, which means
It can be seen that in this special situation Equation (26) degenerates to the simple definition in Equation (16). Since the new criterion is obtained by mathematical deduction, this equivalence also verifies the correctness of the traditional criterions from another perspective. However, for accurate analysis in a specific situation, Equation (21) should be used as a substitute. Additionally, it should be mentioned that, for the sake of simplicity, here we have used rectangle target and far-field approximation to obtain the approximate expression, Equation (23), for the calculation of mainlobe width. Therefore, the restriction given by Equation (26) should be used for rough judgment.
From another point of view, the parameter
can be used for the design of FSR system parameters if the SISAR imaging is considered as one of the system functions. As concluded, the given method has better performance for smaller
, which means longer wavelength, longer baseline, and shorter target length. Therefore, once the configuration is fixed, we need a longer wavelength to achieve the correct RHS reconstruction and SISAR imaging for a longer targets. Considering an adverse situation in which the target is in the near field, the lack of extremums in the mainlobe will disable polynomial fitting and the estimation of the mainlobe envelope. Thus the performance of the proposed method will deteriorate sharply in this situation, and the same is true for the traditional method. Though a long wavelength can guarantee the method’s performance for a long target, the resolving effect of a short target becomes worse as the resolution is proportional to the wavelength [
14]. To solve this dilemma, a multi-frequency system might be an option.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}