
Performance Comparison of Fuzzy ARTMAP and LDA in Qualitative Classification of Iranian Rosa damascena Essential Oils by an Electronic Nose

 and
and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Sample Preparation
2.2. GC-MS
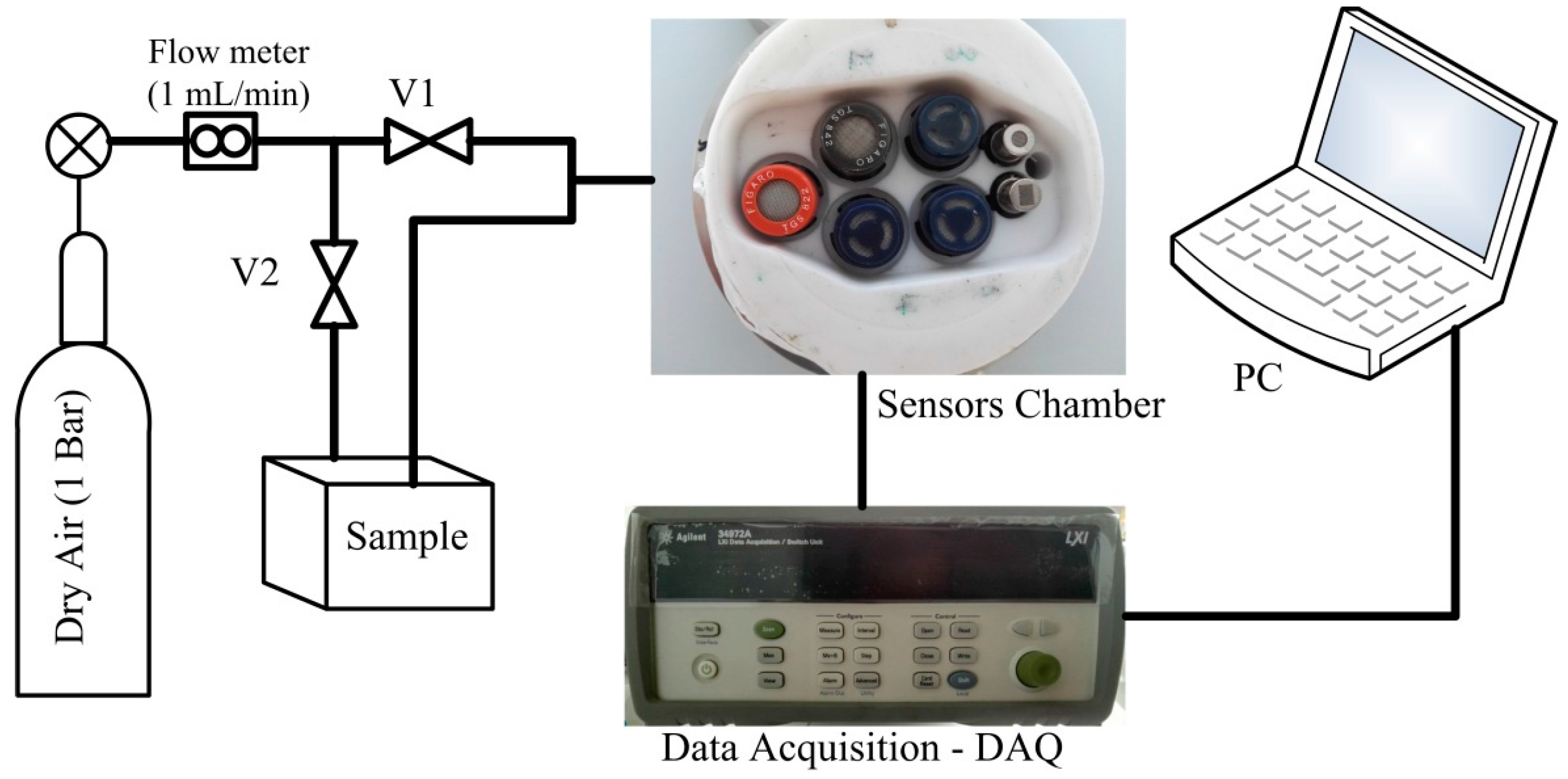
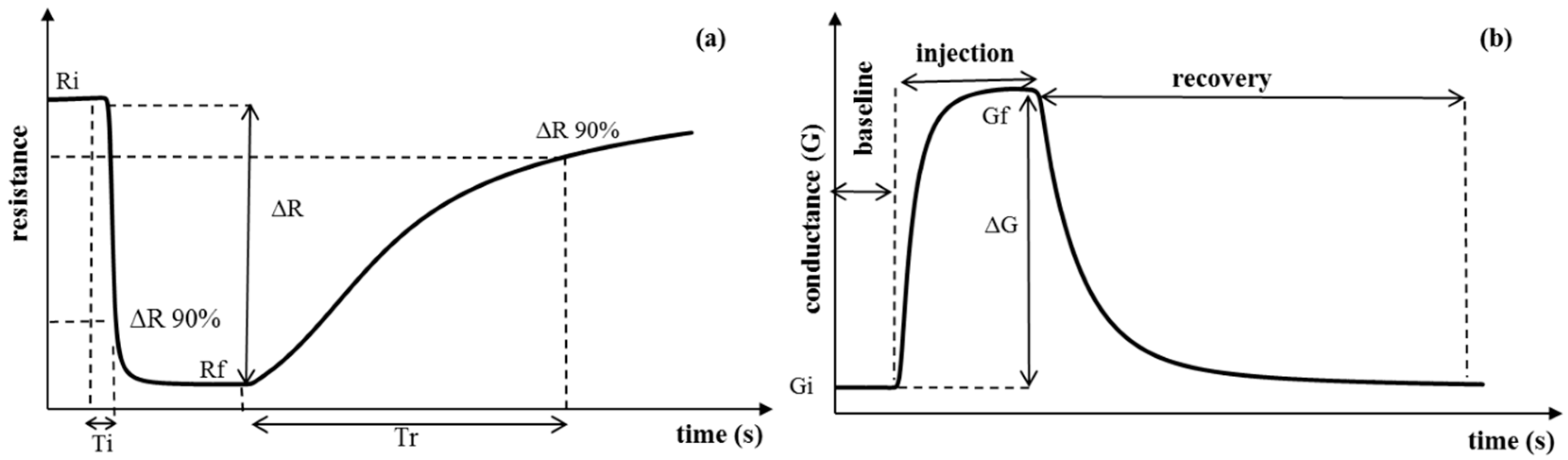
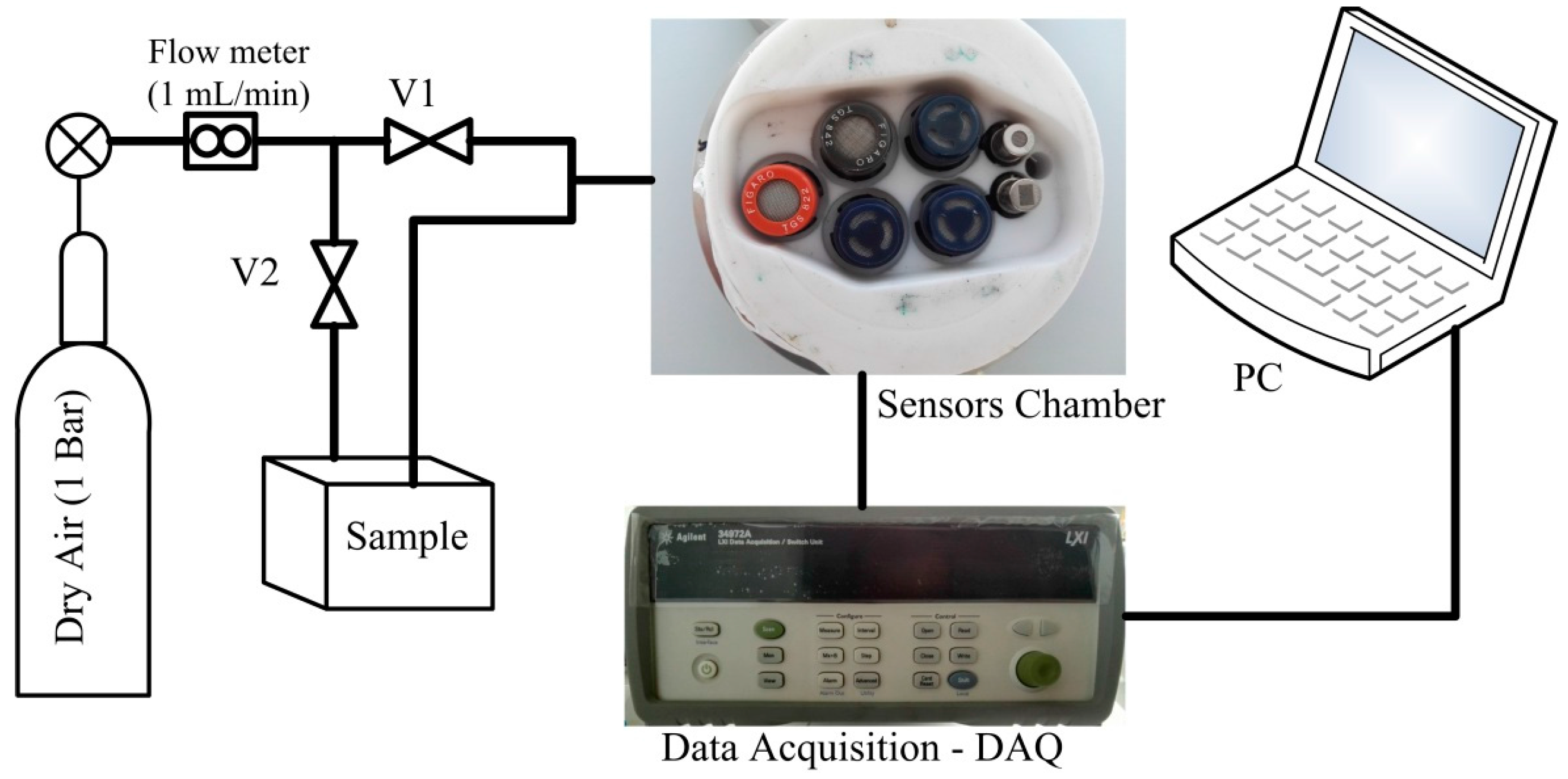
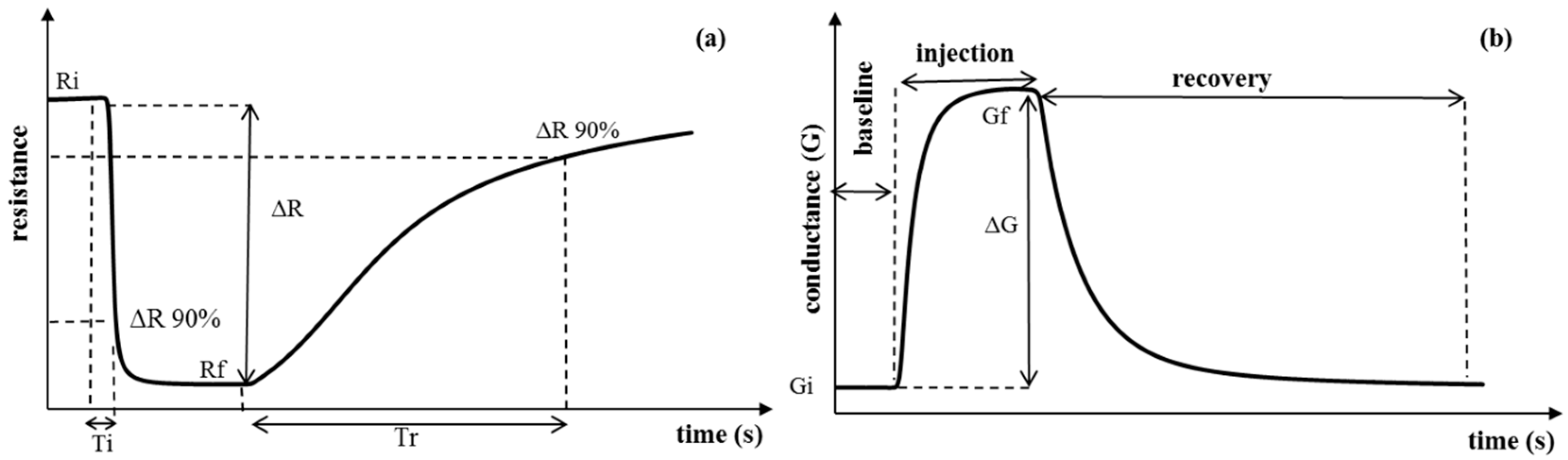
2.3. Electronic Nose Design and Operation
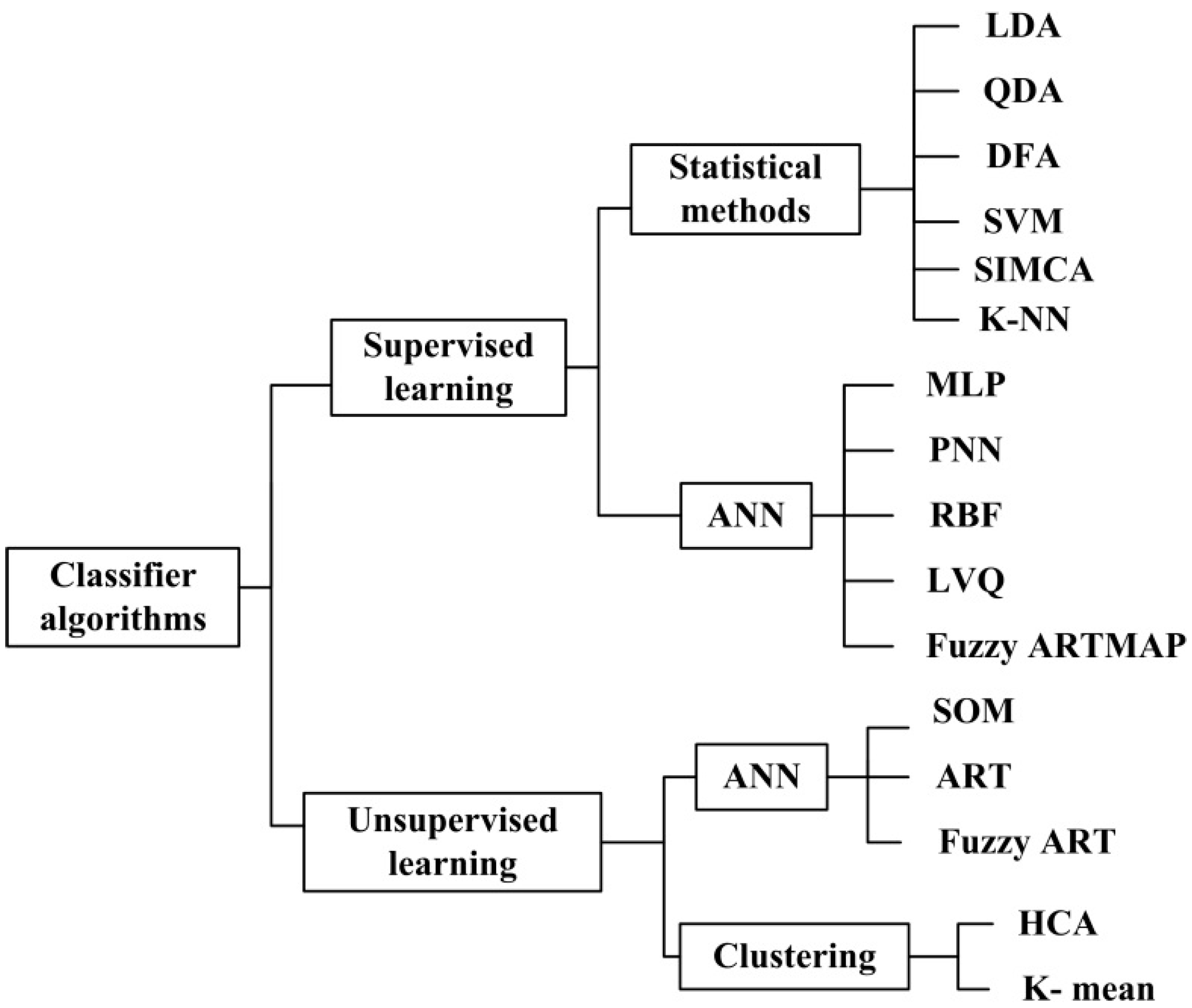
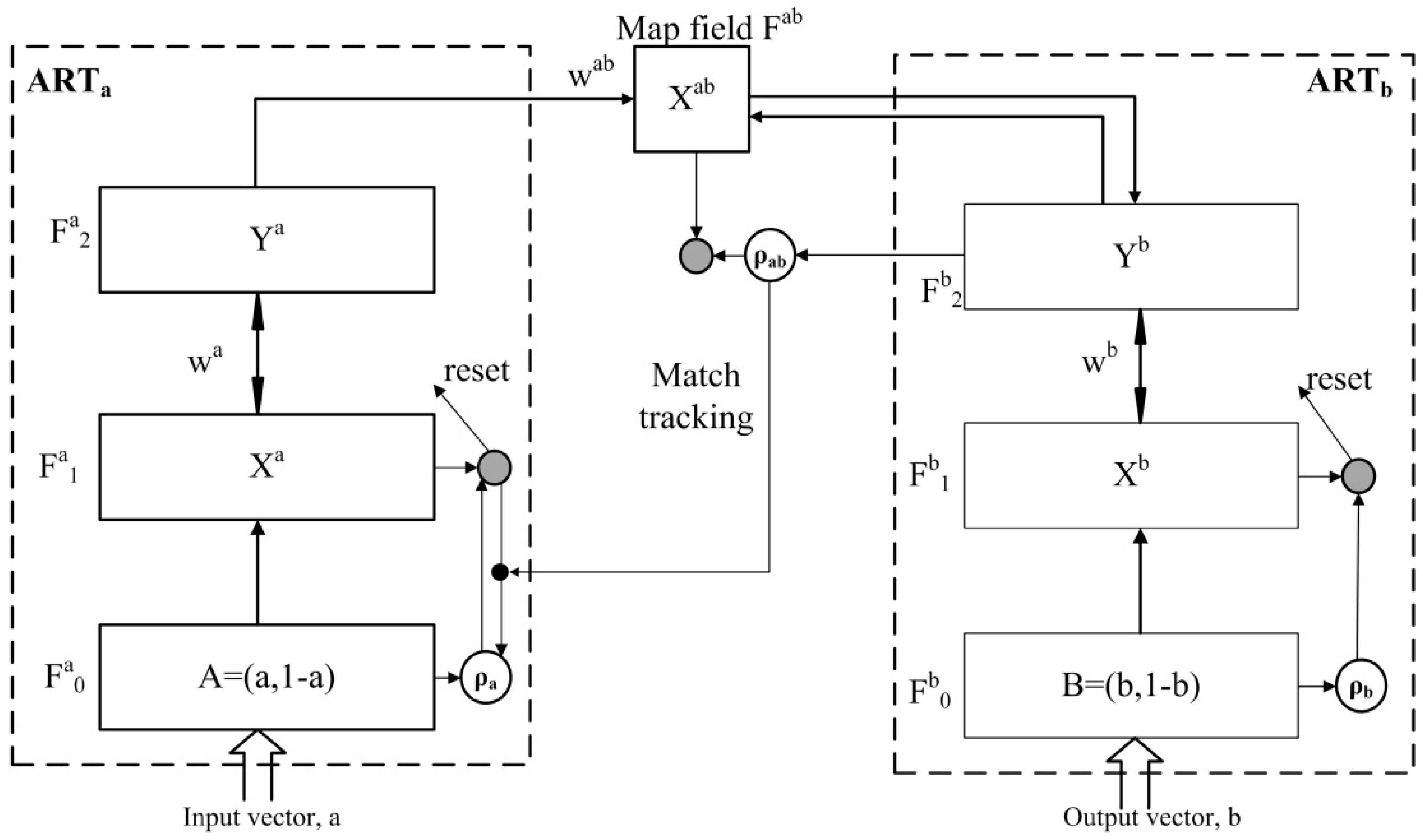
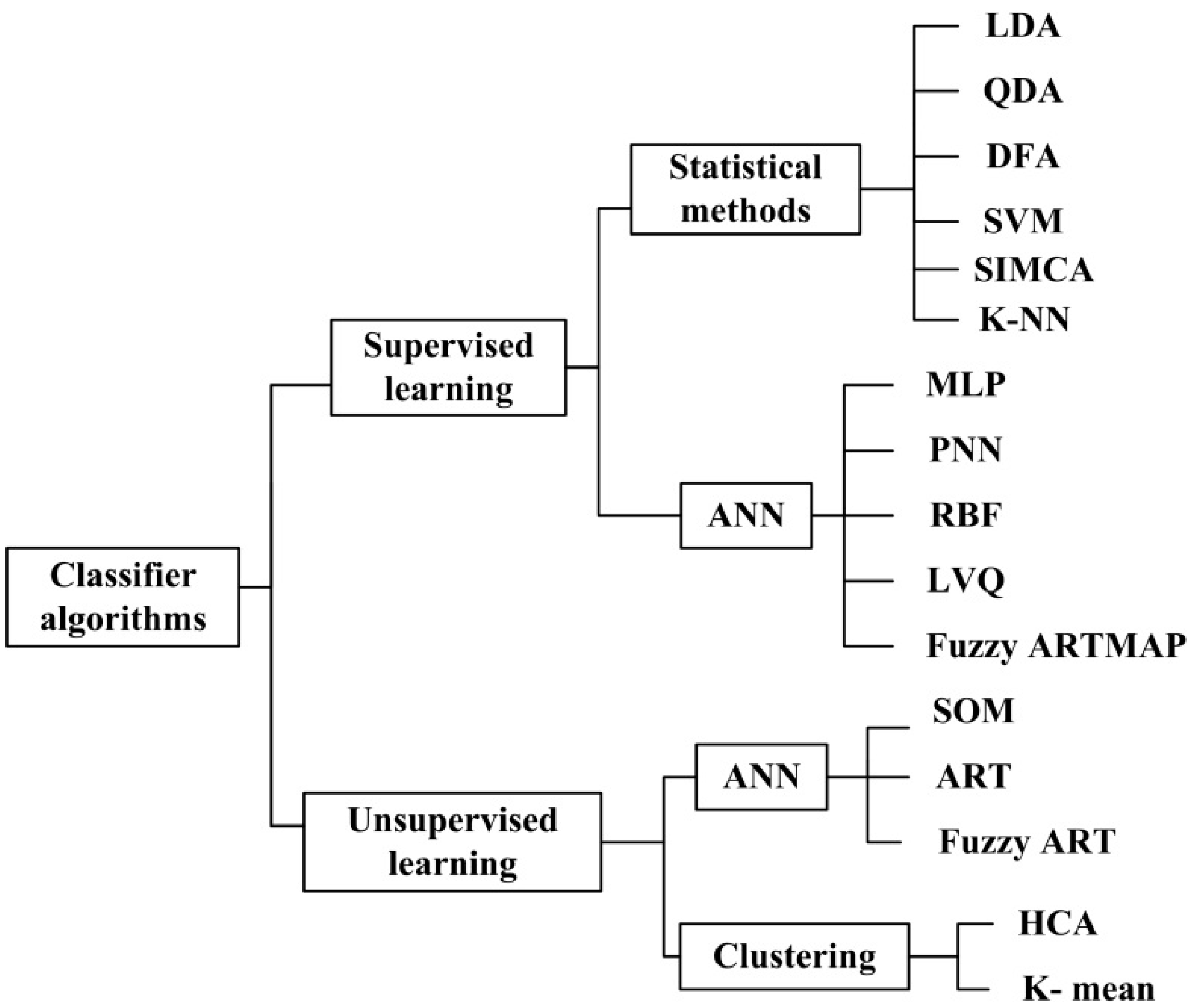
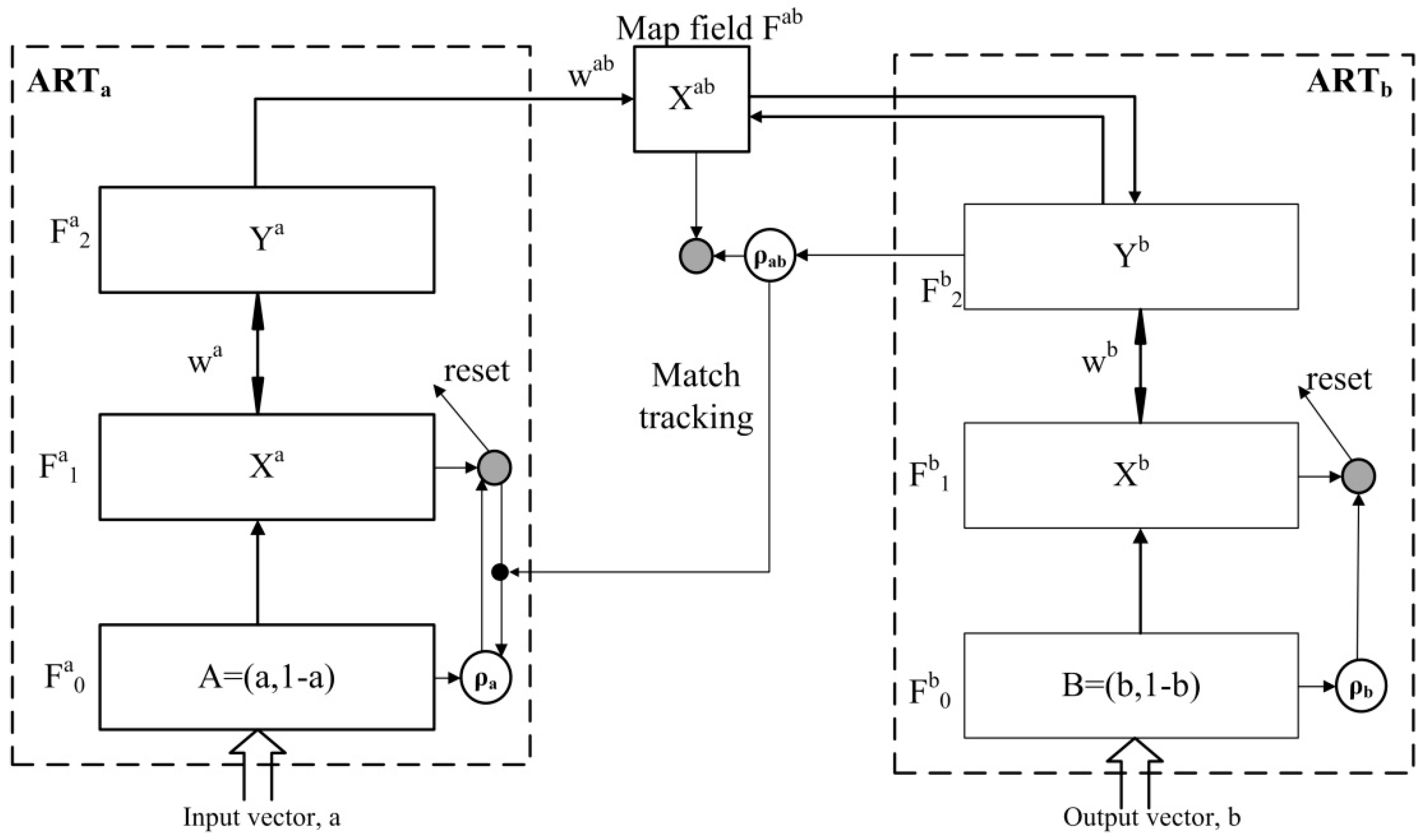
2.4. PARC Techniques (LDA and Fuzzy ARTMAP)
2.5. Statistical Analysis
3. Results and Discussion
3.1. GC-MS Results
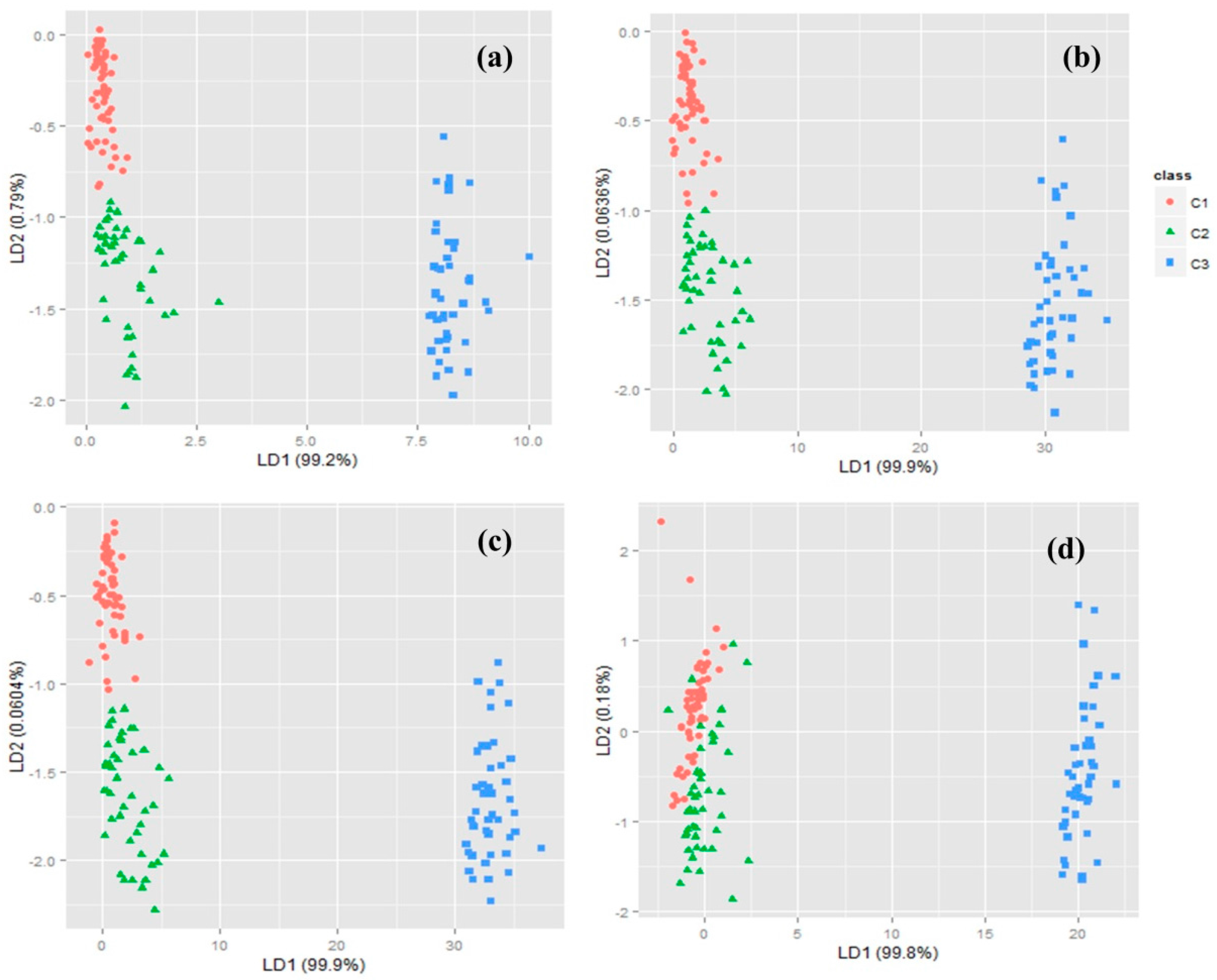
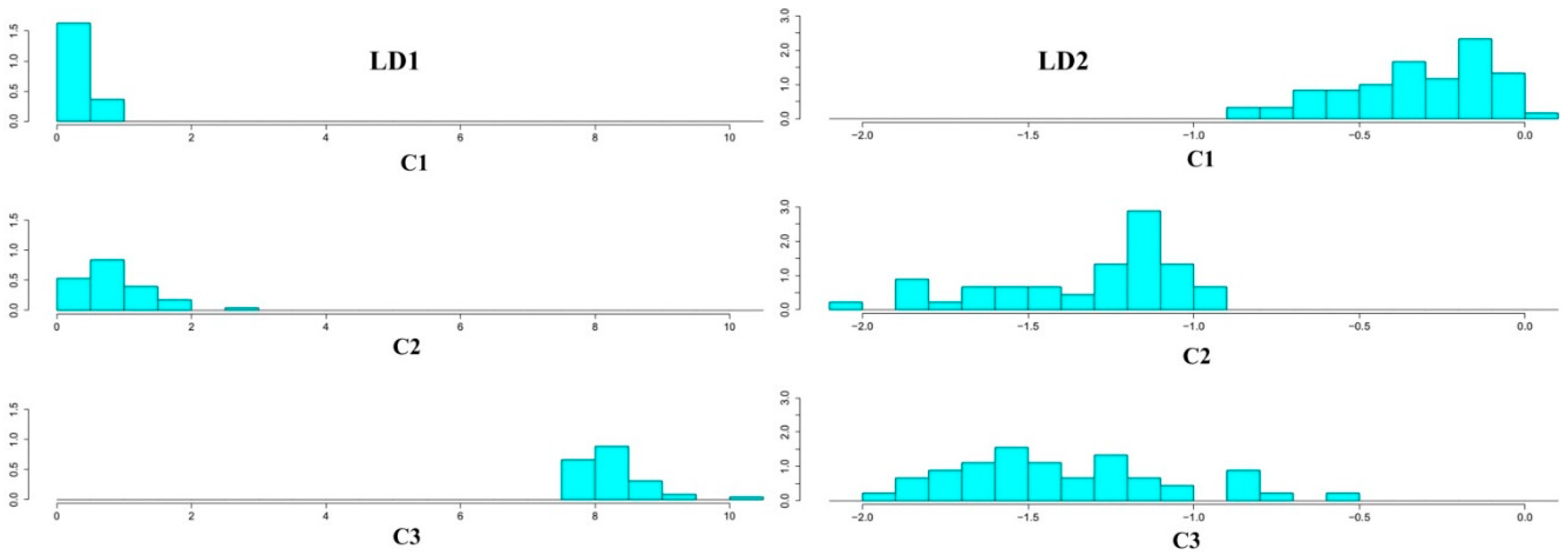
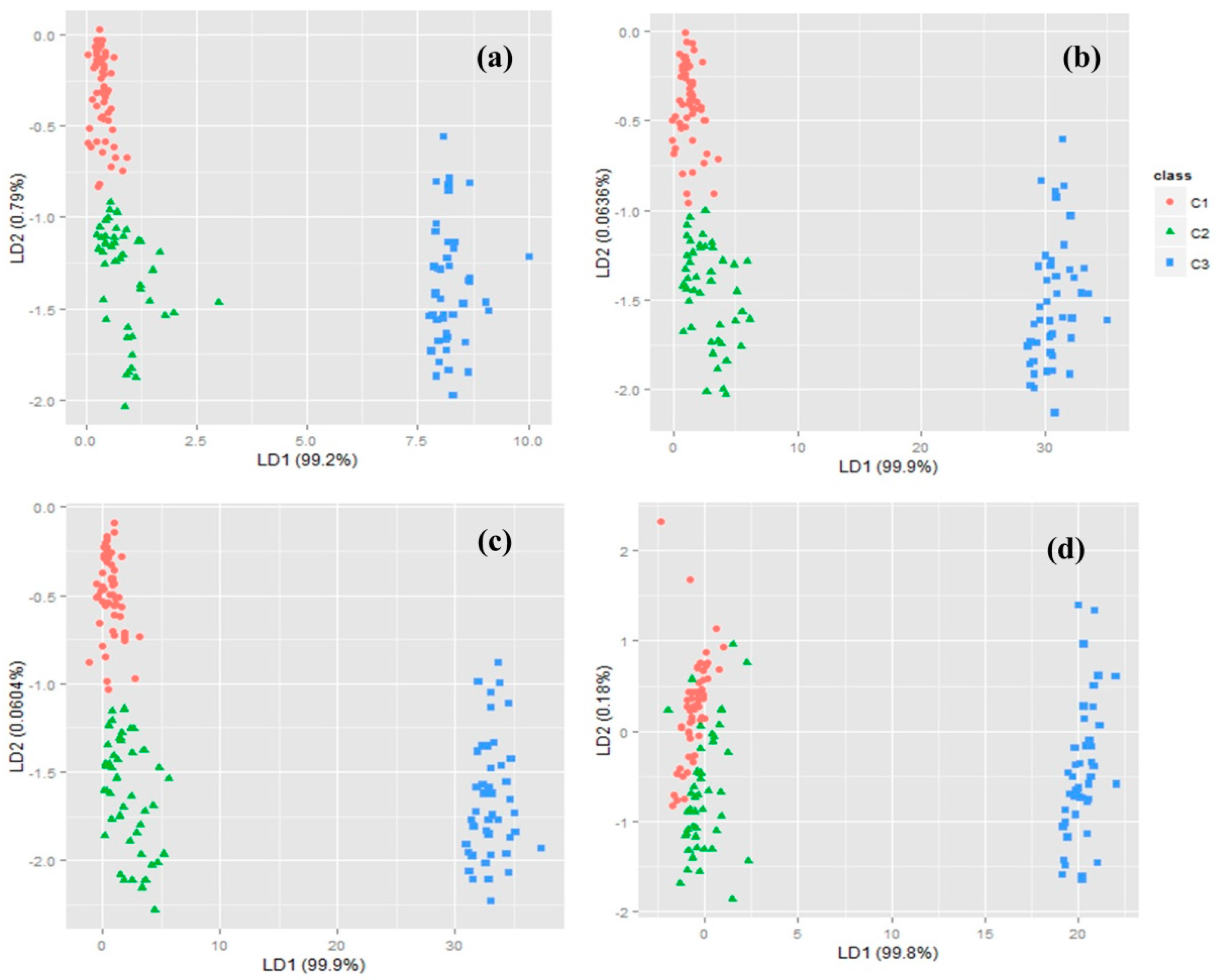
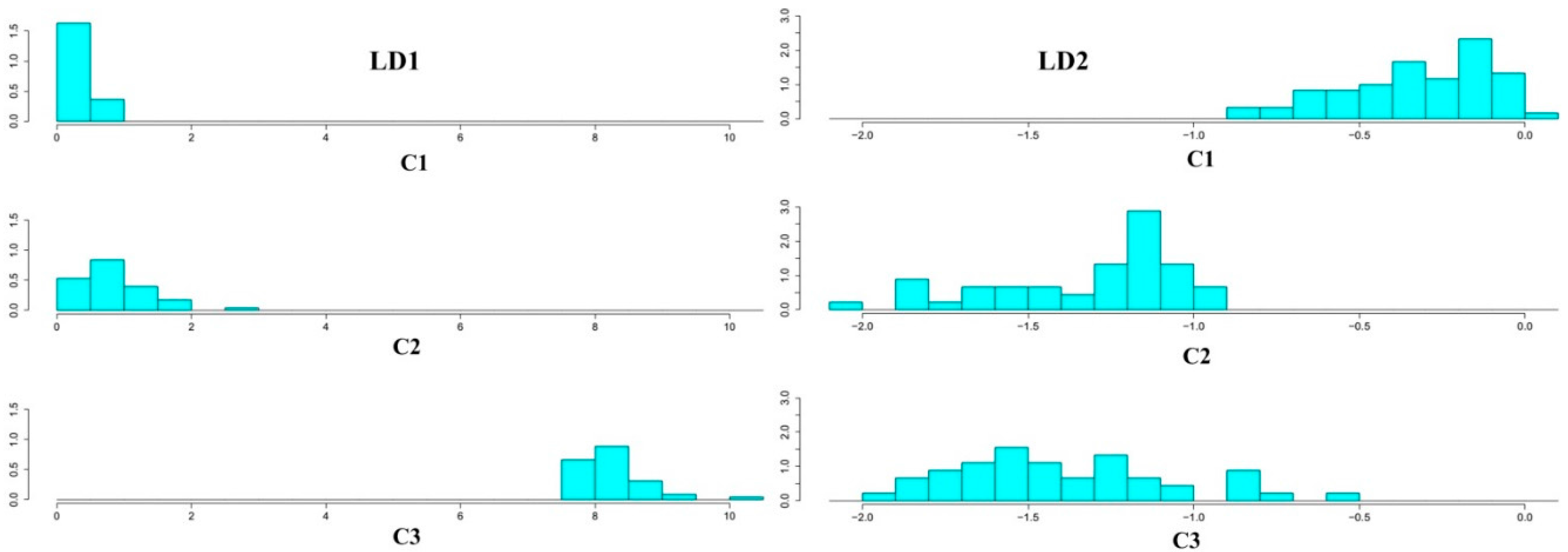
3.2. Classification Results
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| ANN | Artificial Neural Network |
| ART | Adaptive Resonant Theory neural network |
| ARTMAP | Adaptive Resonant Theory Map |
| DFA | Discriminant Factor Analysis |
| EN | Electronic Nose |
| GC-MS | Gas Chromatography coupled to Mass Spectrometry |
| HCA | Hierarchical Cluster Analysis |
| HIV | Human Immunodeficiency Virus |
| HPLC | High Precision Liquid Chromatography |
| K-NN | K Nearest Neighbors |
| LDA | Linear Discriminant Analysis |
| LOOCV | Leave One Out Cross Validation |
| LVQ | Learning Vector Quantization |
| MAP | Medicinal and Aromatic Plant |
| MLP | Multi-Layer Perceptron |
| MOS | Metal Oxide Sensor |
| MSD | Mass Spectroscopy Detector |
| PARC | Pattern Recognition |
| PNN | Probabilistic Neural Network |
| QDA | Quadratic Discriminant Analysis |
| RBF | Radial Basis Function neural network |
| SIMCA | Soft Independent Modelling of Class Analogies |
| SOM | Self-Organizing Map |
| SVM | Support Vector Machine |
| TLC | Thin Layer Chromatography |
References
- Lubbe, A.; Verpoorte, R. Cultivation of medicinal and aromatic plants for specialty industrial materials. Ind. Crops Prod. 2011, 34, 785–801. [Google Scholar] [CrossRef]
- Ozkan, G. Note: Antioxidant and antibacterial activities of Rosa damascena flower extracts. Food Sci. Technol. Int. 2004, 10, 277–281. [Google Scholar] [CrossRef]
- Naquvi, K.J.; Ansari, S.H.; Ali, M.; Najmi, A.K. Volatile oil composition of Rosa damascena. J. Pharmacogn. Phytochem. 2014, 2, 130–134. [Google Scholar]
- Shohayeb, M.; Abdel-Hameed, E.S.S.; Bazaid, S.A.; Maghrabi, I. Antibacterial and antifungal activity of Rosa damascena MILL. essential oil, different extracts of rose petals. Glob. J. Pharmacol. 2014, 8, 1–7. [Google Scholar]
- Rao, B.R.; Rajput, D.; Nagaraju, G.; Adinarayana, G. Scope and potential of medicinal and aromatic plants products for small and medium enterprises. J. Pharmacogn. 2012, 3, 112–114. [Google Scholar]
- Kaul, K.; Karthigeyan, S.; Dhyani, D.; Kaur, N.; Sharma, R.K.; Ahuja, P.S. Morphological and molecular analyses of Rosa damascena × R. bourboniana interspecific hybrids. Sci. Hortic. 2009, 122, 258–263. [Google Scholar] [CrossRef]
- Pal, P.K.; Agnihotri, V.K.; Gopichand; Singh, R.D. Impact of level and timing of pruning on flower yield and secondary metabolites profile of Rosa damascena under western Himalayan region. Ind. Crops Prod. 2014, 52, 219–227. [Google Scholar] [CrossRef]
- Baby, R.; Cabezas, M.; Castro, E.; Filip, R.; De Reca, N.E.W. Quality control of medicinal plants with an electronic nose. Sens. Actuators B Chem. 2005, 106, 24–28. [Google Scholar] [CrossRef]
- Xiong, Y.; Xiao, X.; Yang, X.; Yan, D.; Zhang, C.; Zou, H.; Lin, H.; Peng, L.; Xiao, X.; Yan, Y. Quality control of Lonicera japonica stored for different months by electronic nose. J. Pharm. Biomed. Anal. 2014, 91, 68–72. [Google Scholar] [CrossRef] [PubMed]
- Laureati, M.; Buratti, S.; Bassoli, A.; Borgonovo, G.; Pagliarini, E. Discrimination and characterisation of three cultivars of Perilla frutescens by means of sensory descriptors and electronic nose and tongue analysis. Food Res. Int. 2010, 43, 959–964. [Google Scholar] [CrossRef]
- Huang, Y.; Li, F.; Xia, Y.; Chen, K. Scent profiling of Cymbidium ensifolium by electronic nose. Sci. Hortic. 2011, 128, 306–310. [Google Scholar] [CrossRef]
- Zhang, B.; Huang, Y.; Zhang, Q.; Liu, X.; Li, F.; Chen, K. Fragrance discrimination of Chinese Cymbidium species and cultivars using an electronic nose. Sci. Hortic. 2014, 172, 271–277. [Google Scholar] [CrossRef]
- Hui, G.; Jin, J.; Deng, S.; Ye, X.; Zhao, M.; Wang, M.; Ye, D. Winter jujube (Zizyphus jujuba Mill.) quality forecasting method based on electronic nose. Food Chem. 2015, 170, 484–491. [Google Scholar] [CrossRef] [PubMed]
- Peris, M.; Escuder-Gilabert, L. A 21st century technique for food control: Electronic noses. Anal. Chim. Acta 2009, 638, 1–15. [Google Scholar] [CrossRef] [PubMed]
- El Barbri, N.; Llobet, E.; El Bari, N.; Correig, X.; Bouchikhi, B. Electronic nose based on metal oxide semiconductor sensors as an alternative technique for the spoilage classification of red meat. Sensors 2008, 8, 142–156. [Google Scholar] [CrossRef]
- Ghasemi-Varnamkhasti, M.; Mohtasebi, S.S.; Siadat, M. Biomimetic-based odor and taste sensing systems to food quality and safety characterization: An overview on basic principles and recent achievements. J. Food Eng. 2010, 100, 377–387. [Google Scholar] [CrossRef]
- Ghasemi-Varnamkhasti, M.; Mohtasebi, S.S.; Siadat, M.; Balasubramanian, S. Meat quality assessment by electronic nose (machine olfaction technology). Sensors 2009, 9, 6058–6083. [Google Scholar] [CrossRef] [PubMed]
- Brezmes, J.; Fructuoso, M.L.L.; Llobet, E.; Vilanova, X.; Recasens, I.; Orts, J.; Saiz, G.; Correig, X. Evaluation of an electronic nose to assess fruit ripeness. IEEE Sens. J. 2005, 5, 97–108. [Google Scholar] [CrossRef]
- Qiu, S.; Gao, L.; Wang, J. Classification and regression of ELM, LVQ and SVM for E-nose data of strawberry juice. J. Food Eng. 2015, 144, 77–85. [Google Scholar] [CrossRef]
- Amari, A.; El Barbri, N.; Llobet, E.; El Bari, N.; Correig, X.; Bouchikhi, B. Monitoring the freshness of Moroccan Sardines with a neural-network based electronic nose. Sensors 2006, 6, 1209–1223. [Google Scholar] [CrossRef]
- Benedetti, S.; Buratti, S.; Spinardi, A.; Mannino, S.; Mignani, I. Electronic nose as a non-destructive tool to characterise peach cultivars and to monitor their ripening stage during shelf-life. Postharvest Biol. Technol. 2008, 47, 181–188. [Google Scholar] [CrossRef]
- Ghasemi-Varnamkhasti, M.; Mohtasebi, S.S.; Siadat, M.; Lozano, J.; Ahmadi, H.; Razavi, S.H.; Dicko, A. Aging fingerprint characterization of beer using electronic nose. Sens. Actuators B Chem. 2011, 159, 51–59. [Google Scholar] [CrossRef]
- Yu, H.; Wang, J.; Xu, Y. Identification of adulterated milk using electronic nose. Sens. Mater. 2007, 19, 275–285. [Google Scholar]
- Mildner-Szkudlarz, S.; Jeleń, H.H. Detection of olive oil adulteration with rapeseed and sunflower oils using mos electronic nose and SPME-MS. J. Food Qual. 2010, 33, 21–41. [Google Scholar] [CrossRef]
- Subari, N.; Saleh, J.M.; Md Shakaff, A.; Zakaria, A. A hybrid sensing approach for pure and adulterated honey classification. Sensors 2012, 12, 14022–14040. [Google Scholar] [CrossRef] [PubMed]
- Rocha, A.; Goldenstein, S.K. Multiclass from binary: Expanding one-versus-all, one-versus-one and ECOC-based approaches. IEEE Trans. Neural Netw. Learn. Syst. 2014, 25, 289–302. [Google Scholar] [CrossRef] [PubMed]
- Llobet, E.; Hines, E.L.; Gardner, J.W.; Bartlett, P.N.; Mottram, T.T. Fuzzy ARTMAP based electronic nose data analysis. Sens. Actuators B Chem. 1999, 61, 183–190. [Google Scholar] [CrossRef]
- Ahmadi, K.; Sefidkon, F.; Assareh, M. The effects of different drying methods on essential oil content and composition of three genotypes of Rosa damascena Mill. Iran. J. Med. Aromat. Plants 2008, 24, 162–176. [Google Scholar]
- Mirzaei, M.; Ahmadi, N.; Sefidkon, F.; Shojaeiyan, A.; Mazaheri, A. Evaluation of phytochemical profiling of damask rose (Rosa damascena Mill.) at various post-harvest incubation conditions and determination of the best hydro-distillation time. Iran. J. Med. Aromat. Plants 2015, 31, 732–742. [Google Scholar]
- Adams, R.P. Identification of Essential Oil Components by Gas Chromatography/Mass Spectrometry; Allured Publishing Corporation: Carol Stream, IL, USA, 2001. [Google Scholar]
- Jalali-Heravi, M.; Parastar, H.; Sereshti, H. Development of a method for analysis of Iranian damask rose oil: Combination of gas chromatography-mass spectrometry with Chemometric techniques. Anal. Chim. Acta 2008, 623, 11–21. [Google Scholar] [CrossRef] [PubMed]
- Figaro Engineering Inc. Available online: http://www.figaro.co.jp/en/ (accessed on 2 May 2016).
- FIS Inc. Available online: http://www.fisinc.co.jp/en/ (accessed on 2 May 2016).
- Kim, H.; Konnanath, B.; Sattigeri, P.; Wang, J.; Mulchandani, A.; Myung, N.; Deshusses, M.A.; Spanias, A.; Bakkaloglu, B. Electronic-nose for detecting environmental pollutants: Signal processing and analog front-end design. Analog Integr. Circuits Signal Process. 2012, 70, 15–32. [Google Scholar] [CrossRef]
- Zakaria, A.; Md Shakaff, A.Y.; Masnan, M.J.; Saad, F.S.A.; Adom, A.H.; Ahmad, M.N.; Jaafar, M.N.; Abdullah, A.H.; Kamarudin, L.M. Improved maturity and ripeness classifications of Magnifera Indica cv. harumanis mangoes through sensor fusion of an electronic nose and acoustic sensor. Sensors 2012, 12, 6023–6048. [Google Scholar] [CrossRef] [PubMed]
- Ghasemi-Varnamkhasti, M.; Mohtasebi, S.S.; Siadat, M.; Ahmadi, H.; Razavi, S.H. From simple classification methods to machine learning for the binary discrimination of beers using electronic nose data. Eng. Agric. Environ. Food 2015, 8, 44–51. [Google Scholar] [CrossRef]
- Gardner, J.W.; Shin, H.W.; Hines, E.L.; Dow, C.S. An electronic nose system for monitoring the quality of potable water. Sens. Actuators B Chem. 2000, 69, 336–341. [Google Scholar] [CrossRef]
- Zhang, L.; Tian, F.; Nie, H.; Dang, L.; Li, G.; Ye, Q.; Kadri, C. Classification of multiple indoor air contaminants by an electronic nose and a hybrid support vector machine. Sens. Actuators B Chem. 2012, 174, 114–125. [Google Scholar] [CrossRef]
- Gutierrez-Osuna, R. Pattern analysis for machine olfaction: A review. IEEE Sens. J. 2002, 2, 189–202. [Google Scholar] [CrossRef]
- Xu, Z.; Shi, X.; Wang, L.; Luo, J.; Zhong, C.-J.; Lu, S. Pattern recognition for sensor array signals using Fuzzy ARTMAP. Sens. Actuators B Chem. 2009, 141, 458–464. [Google Scholar] [CrossRef]
- Brezmes, J.; Cabré, P.; Rojo, S.; Llobet, E.; Vilanova, X.; Correig, X. Discrimination between different samples of olive oil using variable selection techniques and modified fuzzy artmap neural networks. IEEE Sens. J. 2005, 5, 463–469. [Google Scholar] [CrossRef]
- El Barbri, N.; Amari, A.; Vinaixa, M.; Bouchikhi, B.; Correig, X.; Llobet, E. Building of a metal oxide gas sensor-based electronic nose to assess the freshness of sardines under cold storage. Sens. Actuators B Chem. 2007, 128, 235–244. [Google Scholar] [CrossRef]
- Palaniappan, R.; Eswaran, C. Using genetic algorithm to select the presentation order of training patterns that improves simplified fuzzy ARTMAP classification performance. Appl. Soft Comput. 2009, 9, 100–106. [Google Scholar] [CrossRef]
- Cho, J.H.; Kurup, P.U. Decision tree approach for classification and dimensionality reduction of electronic nose data. Sens. Actuators B Chem. 2011, 160, 542–548. [Google Scholar] [CrossRef]
- Carpenter, G.A.; Grossberg, S.; Markuzon, N.; Reynolds, J.H.; Rosen, D.B. Fuzzy ARTMAP: A neural network architecture for incremental supervised learning of analog multidimensional maps. IEEE Trans. Neural Netw. 1992, 3, 698–713. [Google Scholar] [CrossRef] [PubMed]
- Carpenter, G.A.; Grossberg, S. A massively parallel architecture for a self-organizing neural pattern recognition machine. Comput. Vis. Graph. Image Process. 1987, 37, 54–115. [Google Scholar] [CrossRef]
- Fuller, R. Neural Fuzzy Systems; Prentice Hall: Upper Saddle River, NJ, USA, 1995. [Google Scholar]
- Wienke, D.; Buydens, L. Adaptive resonance theory based neural networks the ART of real-time pattern recognition in chemical process monitoring. TrAC Trends Anal. Chem. 1995, 14, 398–406. [Google Scholar] [CrossRef]
- Pearce, T.C.; Schifman, S.S.; Nagle, H.T.; Gardner, J.W. Handbook of Machine Olfaction; Wiley: Weinheim, Germany, 2006. [Google Scholar]
- Gardner, J.W. Detection of vapours and odours from a multisensor array using pattern recognition Part I. Principal component and cluster analysis. Sens. Actuators B Chem. 1991, 4, 109–115. [Google Scholar] [CrossRef]
- Gardner, J.W. Detection of vapours and odours from a multisensor array using pattern recognition. Part II. Artificial neural networks. Sens. Actuators B Chem. 1992, 9, 9–15. [Google Scholar] [CrossRef]
- Duran, C.; Brezmes, J.; Gualdrón, O.; Vinaixa, M.; Llobet, E.; Vilanova, X.; Correig, X. Concatenation of a fuzzy artmap neural network to different variable selection techniques to enhance E-nose performance. In Proceedings of the 11th International Symposium on Olfaction and Electronic Nose, Barcelona, Spain, 13–15 April 2005; pp. 29–32.
- Vinaixa, M.; Vergara, A.; Duran, C.; Llobet, E.; Badia, C.; Brezmes, J.; Vilanova, X.; Correig, X. Fast detection of rancidity in potato crisps using e-noses based on mass spectrometry or gas sensors. Sens. Actuators B Chem. 2005, 106, 67–75. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Number | Sensor Name | Target Gas |
|---|---|---|
| S1 | TGS *-822 | Organic Solvent Vapors |
| S2 | TGS-842 | Methane |
| S3 | SP **-15A | LP gas (butane-propane) |
| S4 | SP-32 | Alcohol |
| S5 | SP-53 | Ammonia |
| S6 | TGS-2610 | LP gas (butane-Propane) |
| S7 | TGS-2620 | Organic Solvent Vapors |
| Features | Calculation |
|---|---|
| f1 | |
| f2 | |
| f3 | |
| f4 | |
| f5 | |
| f6 | |
| f7 |
| No. | Cons. Name | Formula | Constituent Percentage for Each Genotype | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| g10 | g9 | g8 | g7 | g6 | g5 | g4 | g3 | g2 | g1 | |||
| 1 | Phenyl ethyl alcohol | C8H10O | 0.64 | 0.18 | 0.61 | 0.37 | 0.3 | 0.3 | 0.21 | - | - | - |
| 2 | Trans rose oxide | C10H18O | 1.25 | 0.61 | 0.5 | 0.61 | 0.4 | 0.23 | 0.12 | 0.32 | 0.18 | 0.4 |
| 3 | Citronellol | C10H20O | 28.18 | 53.1 | 33.7 | 24.1 | 13.35 | 8.48 | 2.14 | 4.73 | 0.48 | 1.25 |
| 4 | Nerol | C10H18O | 16.2 | 2.01 | 3.56 | 0.1 | 0.1 | 0.6 | - | - | - | - |
| 5 | Geraniol | C10H18O | 30.02 | 15.16 | 26.05 | 12.1 | 7.25 | 6.15 | 6.33 | 2.66 | 3.25 | 0.5 |
| 6 | Geranial | C10H16O | 0.48 | 0.26 | 0.27 | 0.1 | 0.21 | 0.2 | 0.1 | 0.14 | 0.15 | - |
| 7 | α-Eudesmol | C15H26O | 0.72 | - | 0.61 | - | 3.15 | 2.18 | - | 2.35 | 2.86 | 1.73 |
| 8 | β-Eudesmol | C15H26O | - | - | 0.67 | - | 2.84 | 2.52 | 2.01 | 2.77 | 4.33 | 1.9 |
| 9 | γ-Eudesmol | C15H26O | - | - | 0.57 | - | 2.68 | 2.43 | - | 1.4 | 1.77 | 1.48 |
| 10 | Cyclohexanemethanol | C15H26O | - | - | - | - | 1.25 | 0.53 | - | 0.17 | 0.62 | 0.44 |
| 11 | Dioctyl Phthalate | C24H38O4 | - | - | - | - | - | - | - | - | - | 15.9 |
| 12 | Farnesol | C15H26O | - | - | 0.27 | 1.53 | - | - | - | 0.9 | 0.95 | - |
| 13 | Octyl phthalate | C24H38O4 | 2.48 | - | 0.28 | - | - | 0.22 | 3.91 | - | 12.0 | - |
| 14 | Geranyl acetate | C12H20O2 | 2.05 | 0.44 | 1.12 | 1.24 | 0.71 | - | 0.5 | 0.1 | - | - |
| 15 | Methyleugenol | C11H14O2 | - | 0.28 | 0.25 | 0.75 | - | - | - | 0.15 | - | - |
| 16 | Diisooctyl phthalate | C24H38O4 | - | 5.16 | - | - | - | - | - | 4.88 | - | - |
| 17 | Linalool | C10H18O | - | - | 0.53 | 0.31 | - | - | 0.83 | - | - | - |
| 18 | Neral | C10H16O | 1.3 | 1.0 | 0.94 | 0.9 | 0.78 | 0.7 | 0.66 | 0.34 | 0.23 | 0.1 |
| 19 | 3-Methyl-4-isopropylphenol | C10H14O | - | 0.53 | - | 0.3 | - | - | - | - | - | - |
| 20 | Eugenol | C10H12O2 | - | - | - | 0.4 | - | - | - | - | - | - |
| 21 | Apilo | C12H14O4 | - | - | 0.23 | 0.42 | - | - | - | - | - | - |
| 22 | Nonacosane | C29H6O | - | - | 0.37 | 0.56 | - | - | - | - | - | - |
| 23 | Nonanal | C9H18O | - | - | 0.13 | - | - | - | - | - | - | - |
| 24 | Anethole | C10H12O | - | 0.55 | 0.5 | - | - | - | - | - | - | - |
| 25 | Chavibetol | C10H12O2 | - | 0.22 | 0.28 | - | - | - | - | - | - | - |
| 26 | Docosane | C22H46 | - | 3.82 | 4.0 | 0.53 | 4.05 | 4.83 | 6.51 | 5.0 | 0.55 | - |
| 27 | Pentacosane | C25H52 | - | 2.25 | - | 2.06 | 1.65 | - | - | - | 2.44 | - |
| 28 | z-5-Nonadecene | C19H38 | - | 2.93 | - | - | - | 6.35 | 6.33 | 6.35 | 5.35 | 5.6 |
| 29 | Nonadecane | C19H40 | 10.94 | 12.76 | 14.2 | 17.6 | 35.9 | 40.3 | 37.2 | 33.7 | 30.5 | 33.1 |
| 30 | Eicosane | C20H42 | 1.9 | 2.48 | 2.28 | 3.12 | 2.73 | 3.76 | 4.15 | 5.4 | 3.43 | 3.28 |
| 31 | Hexadecane | C20H42 | - | - | - | - | - | - | - | - | - | 4.48 |
| 32 | 1-Tetradecene | C14H28 | - | - | - | - | - | - | - | 0.13 | - | - |
| 33 | 9-Eicosene | C20H40 | - | - | 0.2 | - | - | - | - | 0.18 | - | - |
| 34 | 9-Nonadecene | C19H38 | - | 0.21 | 0.33 | - | - | - | 0.35 | 0.37 | - | - |
| 35 | cis-9-Tricosene | C23H46 | - | 0.46 | - | 0.55 | - | - | - | 0.28 | - | - |
| 36 | Bicyclo[10.8.0]eicosane-cis | C20H38 | - | - | - | - | - | - | - | - | - | 0.13 |
| 37 | Hexacosane | C26H54 | - | - | - | - | - | 0.2 | - | 0.2 | - | - |
| 38 | Octacosane | C28H58 | - | - | 0.09 | - | - | - | - | 0.07 | - | - |
| 39 | Heneicosane | C21H44 | 10.0 | 9.66 | 11.2 | 11.6 | 17.34 | 20.7 | 25.7 | 19.6 | 20.2 | 20.0 |
| 40 | Tetracosane | C24H50 | 0.5 | 2.6 | 0.33 | 0.41 | - | 2.42 | 0.27 | 0.6 | 3.68 | 2.87 |
| 41 | Neopentylidenecyclohexane | C11H20 | - | - | - | - | - | 1.35 | - | - | - | - |
| 42 | 1,21-Docosadiene | C22H42 | - | - | - | - | - | 0.15 | - | - | - | - |
| 43 | 1-Octadecene | C18H36 | - | - | - | - | 6.03 | - | - | - | - | - |
| 44 | 8-Heptadecan | C17H34 | - | - | 0.35 | - | 1.5 | 1.84 | - | 1.16 | 0.86 | 0.52 |
| 45 | 2,6-Octadiene, 2,6-dimethyl | C10H18 | - | 0.36 | 0.37 | 0.35 | - | - | - | - | - | - |
| 46 | Heptacosane | C27H56 | - | 0.24 | 2.4 | 2.13 | 2.0 | 0.07 | 3.37 | 2.66 | - | 2.91 |
| 47 | Bergamoten | C15H24 | - | - | - | 0.84 | - | - | - | - | - | - |
| 48 | Teriacontane | C30H62 | 1.78 | 0.4 | - | - | - | - | - | - | - | 0.31 |
| 49 | 1-Nonadecane | C19H38 | - | - | - | 3.5 | - | - | - | - | - | - |
| 50 | Tricosane | C23H48 | - | - | - | 3.75 | - | - | - | - | - | - |
| 51 | 1,19-Eicosadiene | C20H38 | - | - | 0.16 | - | - | - | - | - | - | - |
| 52 | 5-Eicosene, (E) | C20H40 | 3.96 | - | - | - | - | - | - | - | - | - |
| 53 | Pentadecane | C15H32 | - | 0.21 | 0.21 | - | 0.28 | - | - | 0.4 | - | 0.36 |
| 54 | Heptadecane | C17H36 | - | 1.6 | 1.78 | 1.56 | 2.1 | 3.67 | 2.51 | 3 | 2.17 | 2.93 |
| 55 | 7-Tetradecyne | C14H26 | - | - | - | - | - | - | - | - | - | 0.4 |
| 56 | Octadecane | C18H38 | - | 0.6 | 2.16 | 0.4 | - | 0.4 | 2.68 | 0.27 | 5.0 | 0.25 |
| Total Percent for first six constituents | 76.77 | 71.32 | 64.69 | 37.4 | 21.61 | 15.96 | 8.9 | 7.85 | 4.06 | 2.15 | ||
| Analysis | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| LDA | Fuzzy ARTMAP | |||||||||
| No. Features | Real | Predicted | Success Rate | Real | Predicted | Success Rate | ||||
| C1 | C2 | C3 | C1 | C2 | C3 | |||||
| C1 | 60 | 0 | 0 | C1 | 59 | 1 | 0 | |||
| 10 | C2 | 18 | 17 | 10 | 82% | C2 | 0 | 45 | 0 | 99% |
| C3 | 0 | 0 | 45 | C3 | 0 | 0 | 45 | |||
| C1 | 59 | 0 | 1 | C1 | 58 | 2 | 0 | |||
| 20 | C2 | 21 | 11 | 13 | 73% | C2 | 0 | 44 | 1 | 98% |
| C3 | 6 | 0 | 39 | C3 | 0 | 0 | 45 | |||
| C1 | 57 | 0 | 3 | C1 | 58 | 2 | 0 | |||
| 30 | C2 | 23 | 10 | 12 | 67% | C2 | 0 | 43 | 2 | 97% |
| C3 | 12 | 0 | 33 | C3 | 0 | 0 | 45 | |||
| C1 | 57 | 0 | 3 | C1 | 58 | 2 | 0 | |||
| 49 | C2 | 25 | 7 | 13 | 62% | C2 | 1 | 41 | 3 | 96% |
| C3 | 16 | 0 | 29 | C3 | 0 | 0 | 45 | |||
| Variables NO. | Variables Name |
|---|---|
| 1 | S1f5 |
| 2 | S6f5 |
| 3 | S7f5 |
| 4 | S4f5 |
| 5 | S3f5 |
| 6 | S3f7 |
| 7 | S4f7 |
| 8 | S3f3 |
| 9 | S4f3 |
| 10 | S6f4 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gorji-Chakespari, A.; Nikbakht, A.M.; Sefidkon, F.; Ghasemi-Varnamkhasti, M.; Brezmes, J.; Llobet, E. Performance Comparison of Fuzzy ARTMAP and LDA in Qualitative Classification of Iranian Rosa damascena Essential Oils by an Electronic Nose. Sensors 2016, 16, 636. https://doi.org/10.3390/s16050636
Gorji-Chakespari A, Nikbakht AM, Sefidkon F, Ghasemi-Varnamkhasti M, Brezmes J, Llobet E. Performance Comparison of Fuzzy ARTMAP and LDA in Qualitative Classification of Iranian Rosa damascena Essential Oils by an Electronic Nose. Sensors. 2016; 16(5):636. https://doi.org/10.3390/s16050636
Chicago/Turabian StyleGorji-Chakespari, Abbas, Ali Mohammad Nikbakht, Fatemeh Sefidkon, Mahdi Ghasemi-Varnamkhasti, Jesús Brezmes, and Eduard Llobet. 2016. "Performance Comparison of Fuzzy ARTMAP and LDA in Qualitative Classification of Iranian Rosa damascena Essential Oils by an Electronic Nose" Sensors 16, no. 5: 636. https://doi.org/10.3390/s16050636