1. Introduction
The navigation errors of GPS are not divergent with time, but a receiver usually performs less well in highly dynamic situations because there are external signals to be dealt with. On the other hand, though INS has the problem of error accumulation, it realizes autonomous navigation and is robust to vehicle dynamics. Since GPS and INS have complementary advantages, their integration can overcome each other's defects and provide a better navigation performance [
1]. Unlike loose or tight GPS/INS integration, in which GPS is just an aid to INS, the ultra-tight GPS/INS integration uses INS to couple with GPS tracking channels. In this sense, the ultra-tight form is especially applicable to high dynamic situations [
2], and has gradually become the mainstream approach for designing GPS/INS integrated systems.
The ultra-tight GPS/INS integration originates from vector tracking [
3]. Its core concept is using the known ephemeris and the corrected inertial navigation information to calculate tracking parameters. Namely, satellite signal locking is assisted by the integrated navigation filter, and GPS tracking channels no longer remain independent of each other. According to the structural design of the filter models, the ultra-tight GPS/INS integration methods can be roughly divided into two types. In one case, a single high-dimensional filter is used to estimate the GPS tracking parameters of each channel and navigation parameters together [
4,
5], and in the other case, each channel has a baseband signal pre-filter which estimates the tracking parameters for itself, and the integrated navigation filter just needs to estimate the navigation parameters. The second category is actually a form of federated filtering, and usually has higher computational efficiency [
6,
7,
8].
The baseband signal preprocessing realizes optimal estimation of signal characteristic quantities by KF. Thus, under the application background of the ultra-tight GPS/INS integration, it can restrain phase noise more effectively than the loop filter of the classical GPS tracking channel [
9,
10]. For each channel, the baseband signal preprocessing is generally completed by a single pre-filter [
11]. Both carrier tracking errors and code tracking errors are included in the state vector, namely, these two kinds of tracking errors are tightly coupled through the state and observation equations. However, the precision of carrier and code loops do not have the same order of magnitude. The code loop has great tolerance for tracking errors due to the long wavelength of CA code, while the carrier loop is much more sensitive [
12,
13]. As preprocessing continues, the code tracking errors would be delivered to the carrier loop and cause the degradation of carrier tracking precision or even loss of lock. In addition, even if the baseband signal preprocessing is applied in a GPS receiver, the Doppler shifts estimated under highly dynamic conditions may still contain significant errors. In the ultra-tight GPS/INS integration, these incorrect GPS outputs eventually lead the estimation of INS errors to be contaminated [
14]. That generally means the whole system suffers performance degradation, or even completely crashes.
To solve these problems, this paper makes creative contributions in both the tracking and navigation domain. Two independent pre-filters with state feedback are constructed to replace the classical loop filters. The advantages of decoupling between carrier tracking and code tracking are analyzed in detail. Since the single-filter and dual-filter preprocessing models are constructed based on the same principle, their comparison can be free from the influence of other factors. In fact, compared with a popular error-state pre-filter, even the single-filter model has better tracking performance due to the benefits of state feedback. In the ultra-tight GPS/INS integration, local carrier generation is still controlled by state feedback, and the carrier frequency derived from the external navigation information is just used to correct the state feedback value. Meanwhile, a specific integrated navigation filter is presented by taking the pseudorange rate estimation error in each channel as the additional state variable. This scheme ensures the estimation of original state variables, especially the INS errors, is immune to these GPS tracking errors, and hence enables the integrated system to maintain high accuracy even when GPS receiver operates under harsh conditions.
The rest of this paper is organized as follows: first, a baseband signal preprocessing model is designed based on a dual-filter structure, while the state feedback control values of carrier and code loops are derived in detail. Then, the specific integrated navigation filter is proposed, and a concrete approach to aid the tracking channel is elaborated. Furthermore, the results of field tests and semi-physical simulation are given and discussed. Finally, the work in this paper is summarized.
2. Construction of Baseband Signal Preprocessing Model Based on Dual-filter Structure
The classical GPS tracking channel, which typically adopts second-order or third-order phase control technology, has fixed loop bandwidth. Although a narrower bandwidth is helpful to reduce the thermal noise, in highly dynamic situations, the tracking channel may not retain useful high frequency information and suffers from significant dynamic stress error. These usually lead to signal distortion and tracking loss. Thus, a trade-off between noise resistance and response to dynamics is required while setting the loop bandwidth. In view of the abovementioned fact, the classical control approach cannot cope well with high dynamics, and hence KF, which belongs to the modern control category, is taken into account. KF is a kind of optimal estimator, which allows precise modeling of the tracking loop. With its help, baseband signal preprocessing can achieve accurate control of the local signal generation, even in highly dynamic situations [
15].
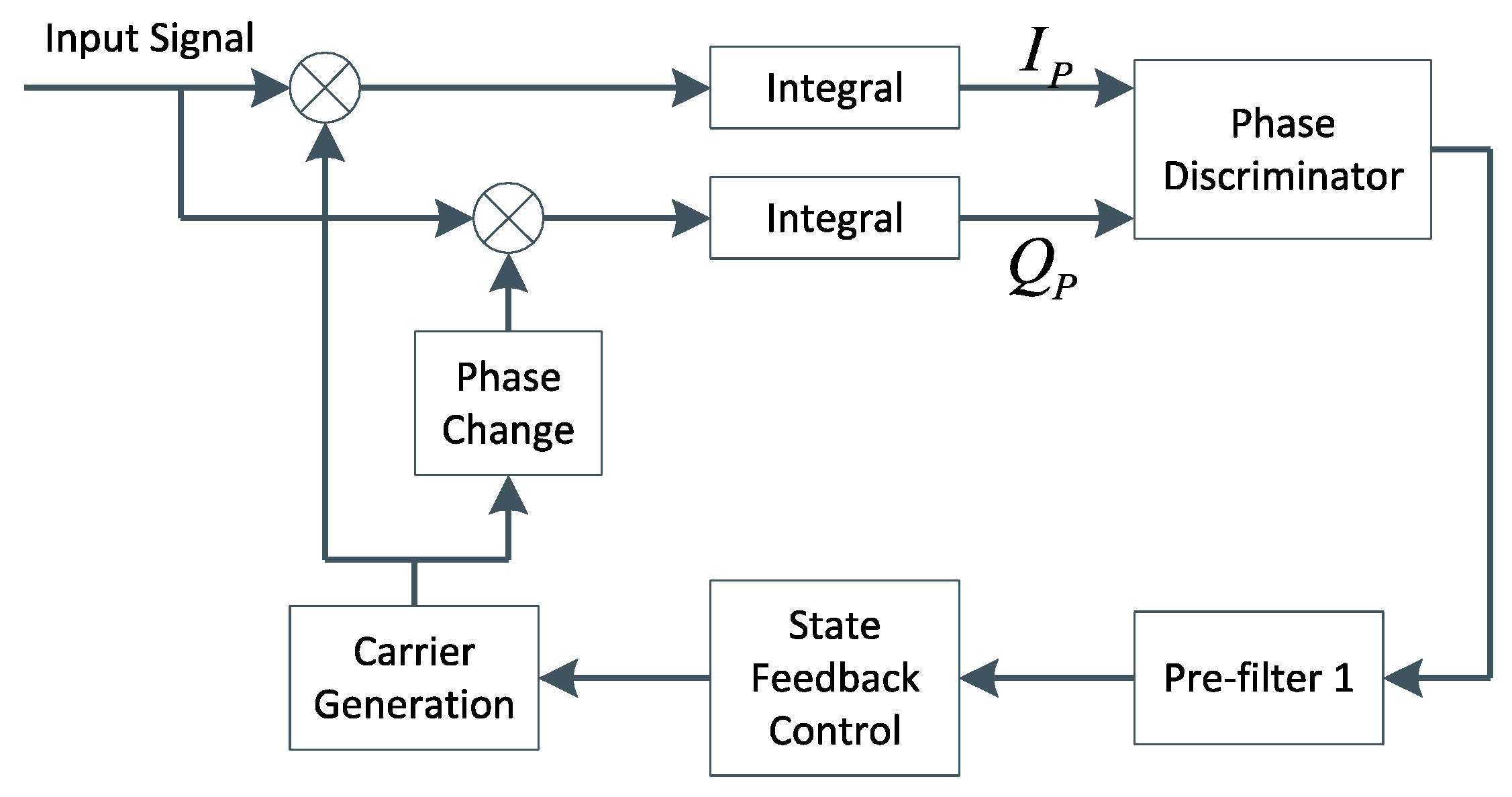
The baseband signal preprocessing model constructed in this paper contains two pre-filters. In this model, the estimation of carrier and code tracking errors are relatively separate, the same as the manner adopted by classical GPS receiver.
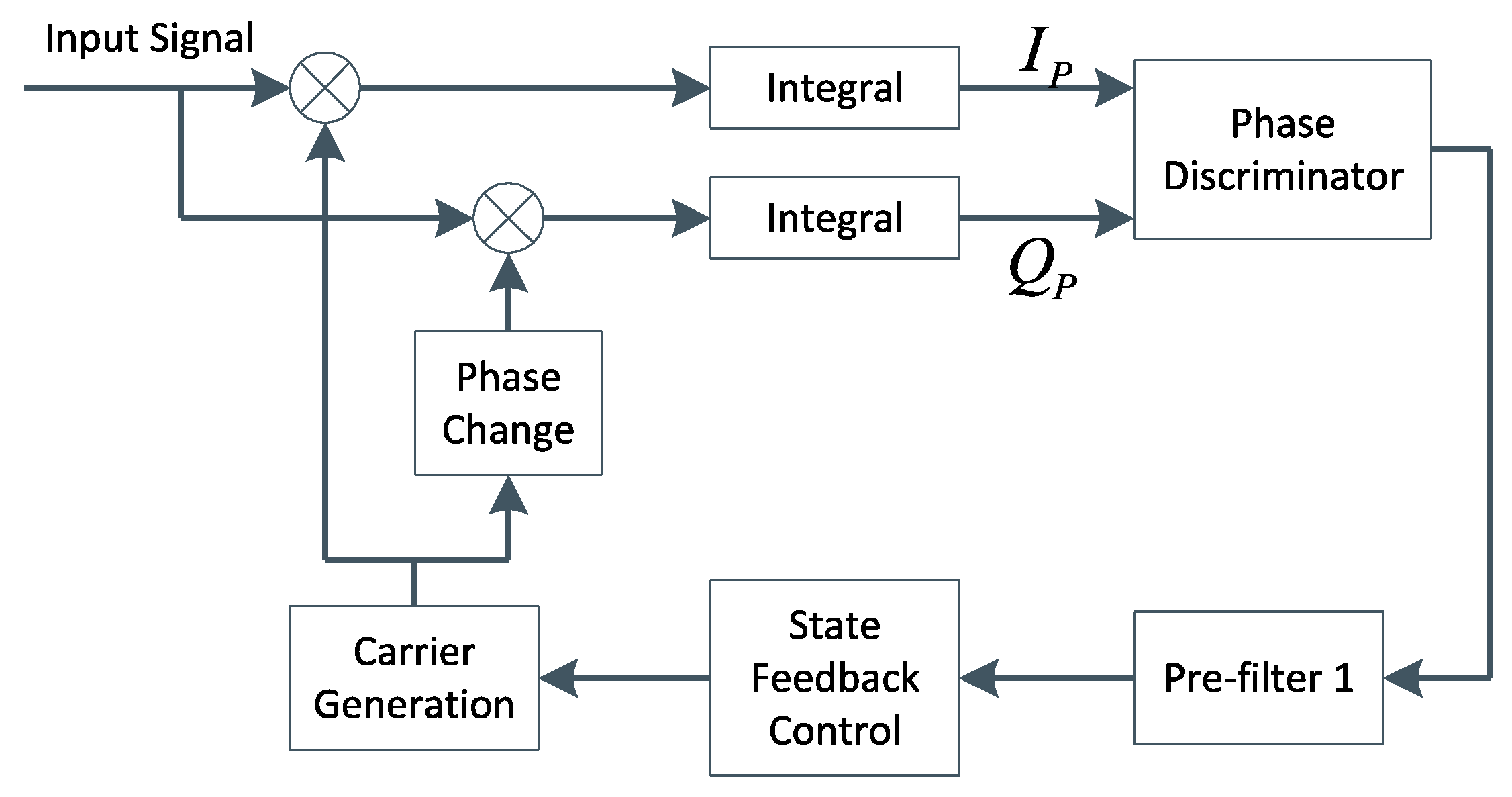
Figure 1 just takes carrier loop for example to show the details of this model. It is observed that the loop filter in the classical tracking channel has been replaced by a pre-filter equipped with state feedback. Obviously, designing a suitable KF is the key to accurate carrier tracking.
This paper sets
as the state vector of pre-filter 1, where
is the epoch,
is the carrier phase error (unit: rad),
is the input carrier frequency, and
is the changing rate of the input carrier frequency. These state variables have the following recurrence relations:
where
is the coherent integration time,
is the local carrier frequency at epoch
.
The output of carrier phase discriminator at epoch
k, notated as
, is the average carrier phase error over an integration interval, due to the presence of Doppler shift. Thus, this output can be expanded as:
Unfortunately, if Equation (2) is directly used to generate the observation model for pre-filter 1, there will be a time lag between the state vector and observation [
16]. Hence, by moving
,
and
to the left side of the equal sign, Equation (1) is rewritten as follows (more details are available in Appendix A):
Substitution of Equation (3) into Equation (2) results in:
Then, in terms of Equations (1) and (4), the state equation and observation equation of pre-filter 1 can be expressed as:
where:
is the observation, and can be directly obtained from carrier phase discriminator, namely:
,
represent the system noise and observation noise, respectively. Assume these two noises have the following characteristics:
where
is the Kronecker delta. Then, the corresponding iterative algorithm for pre-filter 1 is given below:
The carrier loop is in essence a Phase Lock Loop (PLL), and aims to achieve the elimination of the carrier phase error. Since
, by assuming
, the feedback at epoch
k can be obtained as:
It can be seen that
is not exactly equivalent to the estimated input carrier frequency
. And further discussions about
and
can be found in
Section 3 and
Section 4.1.
Similarly, the state vector of pre-filter 2 is set to
, where
is the code phase error (unit: chip),
is the input code frequency, and
is the changing rate of the input code frequency. Meanwhile, in consideration of the following formula:
where
is the Doppler shift,
is the Intermediate Frequency (IF),
(1575.42 MHz) is the L1 carrier frequency,
(1.023 MHz) is the nominal code frequency, the state equation and observation equation of pre-filter 2 can be written as:
where:
,
are respectively the system and observation noises of pre-filter 2, while the observation
obtained from code phase discriminator can be denoted by:
is the local code frequency at epoch
. Moreover, at epoch
, the local code frequency, namely the feedback for code tracking, can be expressed as:
Since code estimation is processed after carrier stripping, its errors have no effect on carrier tracking. At the same time, once these two pre-filters are skillfully tuned, they can accurately track GPS signals in high dynamic situations. Taking pre-filter 1 for example, its equivalent bandwidth can be calculated from the elements of the gain matrix
and is proportional to
,
and
[
17]. Herein,
,
and
are the diagonal elements of
.
and
(the epoch
is omitted to reveal these two values are constant) can be obtained from the receiver clock model [
11], while
is related to the vehicle dynamics. If
is estimated in real-time by any efficient adaptive algorithm, the loop bandwidth will vary in a time-varying optimal manner. This paper uses another more practical method:
is set to a large constant value based on the general knowledge of vehicle dynamics. Since
and
are unchanged, the low variances of
and
can be maintained [
3]. In other words, although the variance of
increases, phase and frequency estimations which normally deserve concern can hardly be affected. Additionally,
is set according to the knowledge of the phase noise variance, while
is usually larger than
to leave space for state corrections. In this case, pre-filter 1 gradually settles down to a wide bandwidth, and hence is robust to high dynamics. Benefiting from the above mentioned advantages, this baseband signal preprocessing model can be appropriate for highly dynamic situations and make GPS have better tracking and navigation performance.
3. Realization of the Specific Ultra-tight GPS/INS Integration
The carrier tracking loop employing pre-filter 1 is in essence equivalent to a third-order loop. However, a
N-th order phase locked loop cannot correctly track the signal whose phase varies by time to the
or higher-order power (the estimates of signal parameters can still have low variance, but not low bias) [
18]. That indicates, even improved by baseband signal processing, an independent GPS receiver is vulnerable to extreme high dynamics, and may give inaccurate tracking and navigation results.
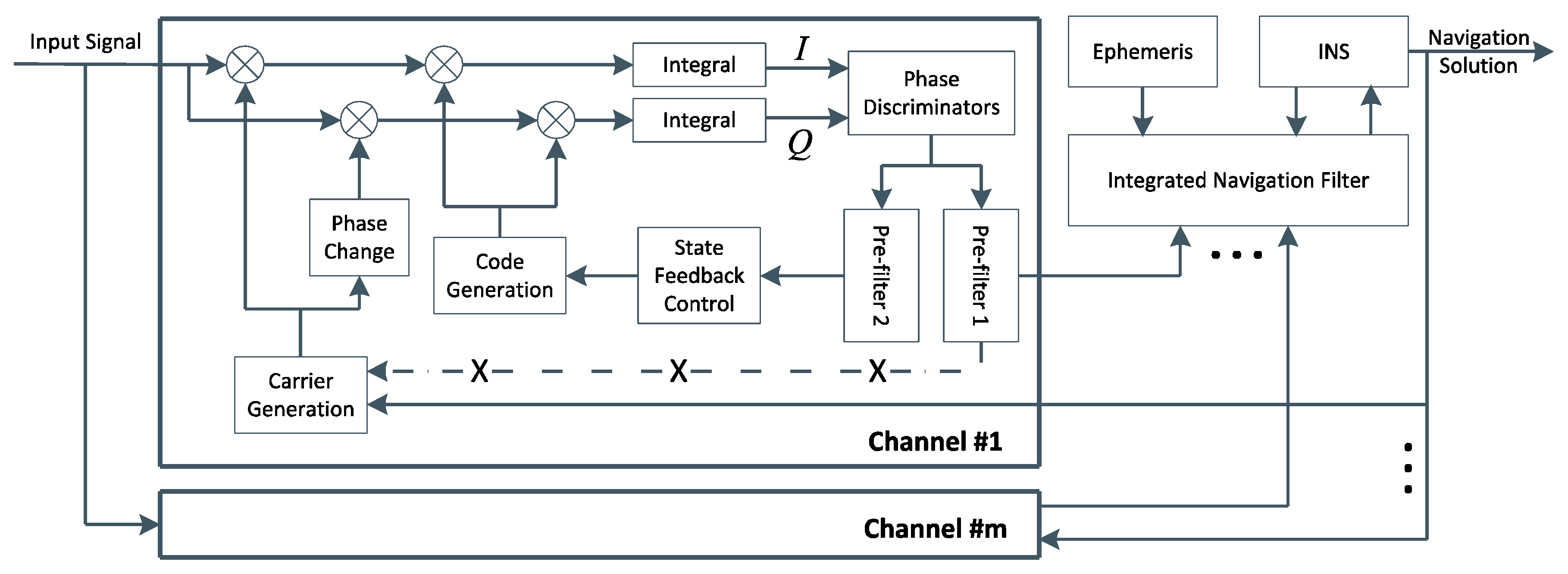
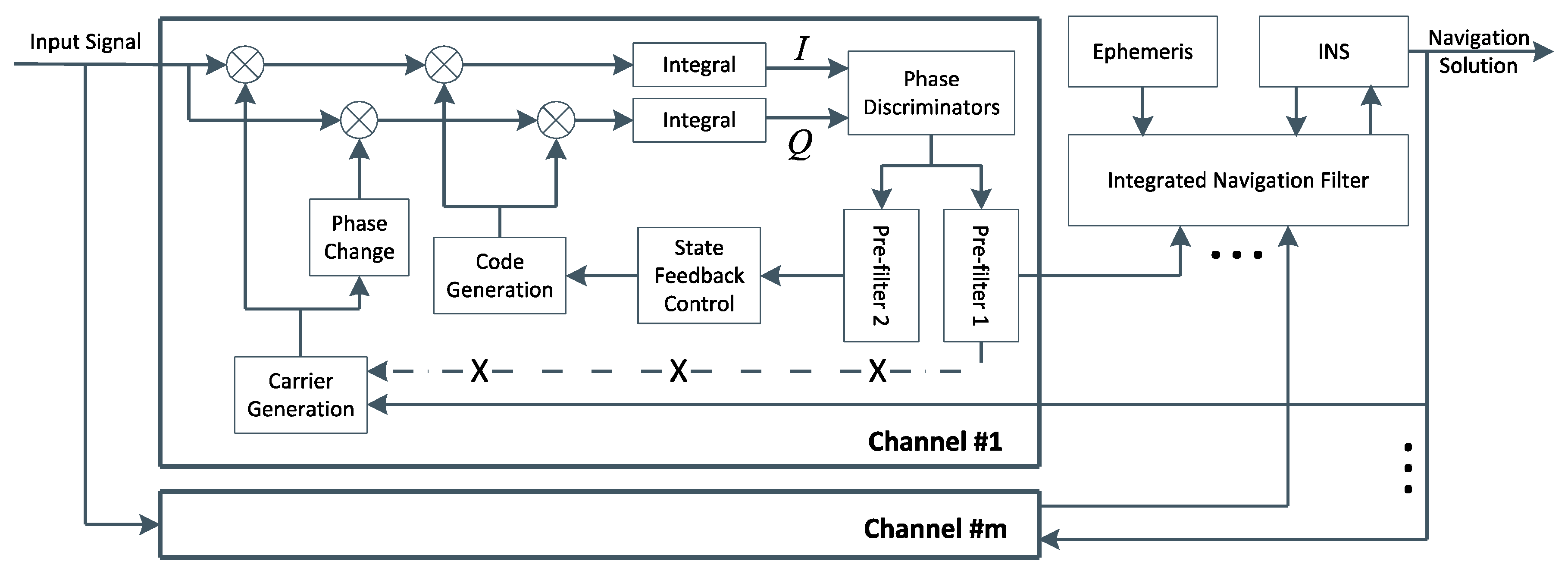
On the contrary, INS is robust to vehicle dynamics. Based on this fact, INS can be used to assist GPS, which usually means baseband signal processing is connected closely with the estimation of navigation parameters. In the ultra-tight GPS/INS integration shown in
Figure 2, the integrated navigation filter is responsible for obtaining corrected inertial navigation information, and delivering them back to GPS tracking channels. Because the feedback from the corrected inertial navigation information has the advantage of high accuracy in a short time, GPS tracking channel can perform better under highly dynamic conditions. The detailed work procedure of this ultra-tight GPS/INS integration is as follows: in each GPS tracking channel, in-phase and quadrature signals are processed by phase discriminators and pre-filters to estimate tracking parameters, such as carrier frequency and code phase; the observations of the integrated navigation filter can be converted from tracking parameters as well as deduced from inertial navigation information and satellite ephemeris, and then the corrected inertial navigation information can be obtained; finally, auxiliary tracking parameters, carrier frequency, for example, can be deduced from these external navigation information and satellite ephemeris, and then be applied to assist signal tracking. Through the above analysis, it can be seen that identifying conversion relations between tracking parameters and navigation parameters as well as finding a rational way to assist tracking are the keys to designing a good ultra-tight GPS/INS integration.
In the ideal situation, pseudorange rate and variation of pseudorange output by GPS tracking channel can be respectively derived from:
where
is the speed of light. But in fact, under highly dynamic conditions, the carrier phase of satellite signal may be proportional to time to the power of
or higher value, and hence the estimated carrier frequency may contain a large error
. Since the incorrect GPS outputs could destroy the estimation of INS errors, it is necessary to analyze this error in detail. Therefore Equation (27) is rewritten as:
On the other hand, Equation (28) can remain unchanged due to the fact that the code loop dynamic stress error is usually small.
, which represents the current pseudorange output by the GPS tracking channel, can be calculated from
and the previous pseudorange. Then, in Earth Centered Earth Fixed (ECEF) coordinate system, the observation equation of integrated navigation filter can be expressed as:
where
,
respectively represent the pseudorange and pseudorange rate deduced from inertial navigation information and satellite ephemeris,
,
,
,
,
,
are vehicle position errors and velocity errors in ECEF coordinate system,
,
,
are unit vectors in the
,
, and
direction,
,
represent clock bias and drift respectively,
is the error of pseudorange rate output by the GPS tracking channel and equals to
,
,
are observation noises. It is noted that Equation (30) should usually be transformed into the geodetic coordinate system to facilitate INS error correction. Then, taking all the available tracking channels into consideration, the observation matrix
can be obtained naturally, where the superscript "
" denotes the navigation filter designed in this paper.
If there are
satellites being locked by tracking channels, the state vector of the integrated navigation filter can be expressed as:
where
is the transpose of the state vector adopted by a traditional integrated navigation filter, namely
and the first 15 variables of
represent three INS error states each in attitude, velocity, position, gyro bias, accelerometer bias. Accordingly, the state transition matrix
and the noise matrix
of the traditional integrated navigation filter can be expanded to:
In addition,
can also be written as:
where
is the traditional observation matrix. The specific information of
,
and
can be easily found in many references [
19,
20,
21,
22] and will not be discussed in detail here.
According to the conversion relations indicated by Equations (27) and (28), the corrected inertial navigation information can in turn feed back into GPS tracking channels. The corresponding carrier frequency estimate is usually accurate enough, and can be used to directly control local carrier generation. However, in the new baseband signal preprocessing model, it is hoped that the phase error can return to 0 in the shortest amount of time, so the external information assists in local carrier generation through correcting the state feedback value, and the input carrier frequency estimated output by pre-filter 1 can be expected to remain relatively stable and accurate. In other words, instead of being given by Equation (17), the local carrier frequency
is calculated from:
where
,
,
are the corrected vehicle velocity components in ECEF coordinate system,
,
,
are the satellite velocity components. Meanwhile, because vehicle dynamics have less effect on the code loop, generation of local code is still based upon the state feedback value
given by Equation (26), namely, the structure of the code loop is unchanged.
5. Conclusions
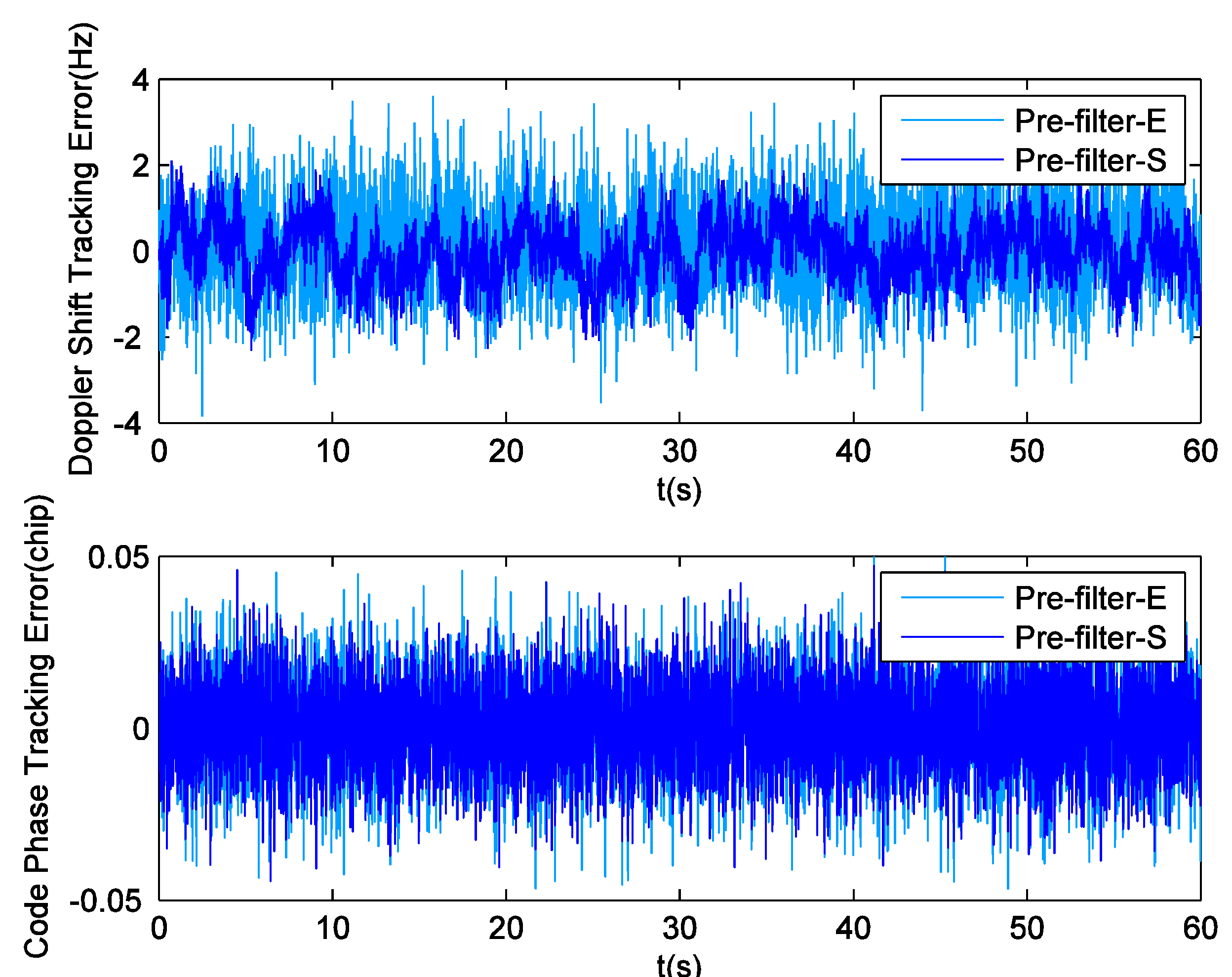
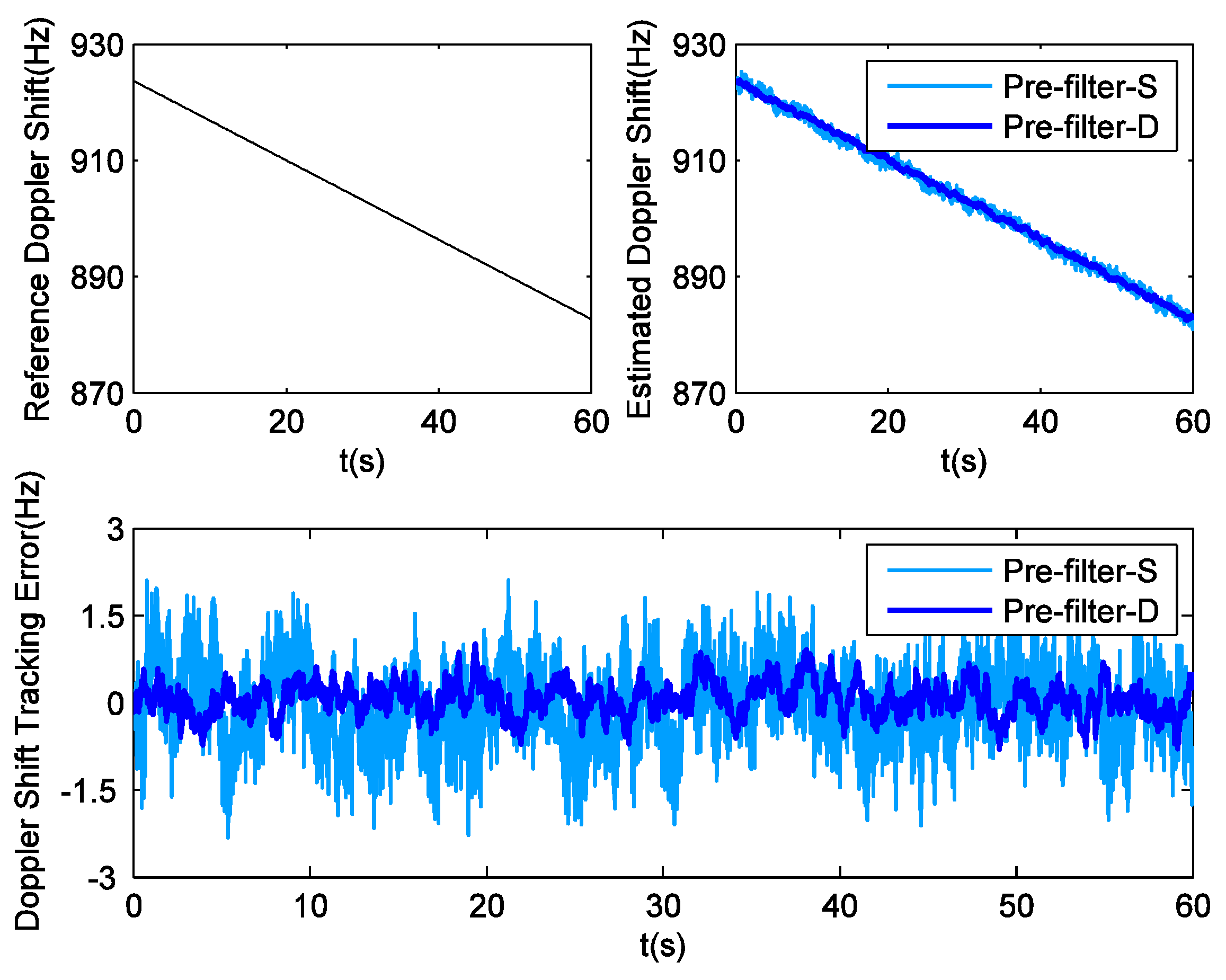
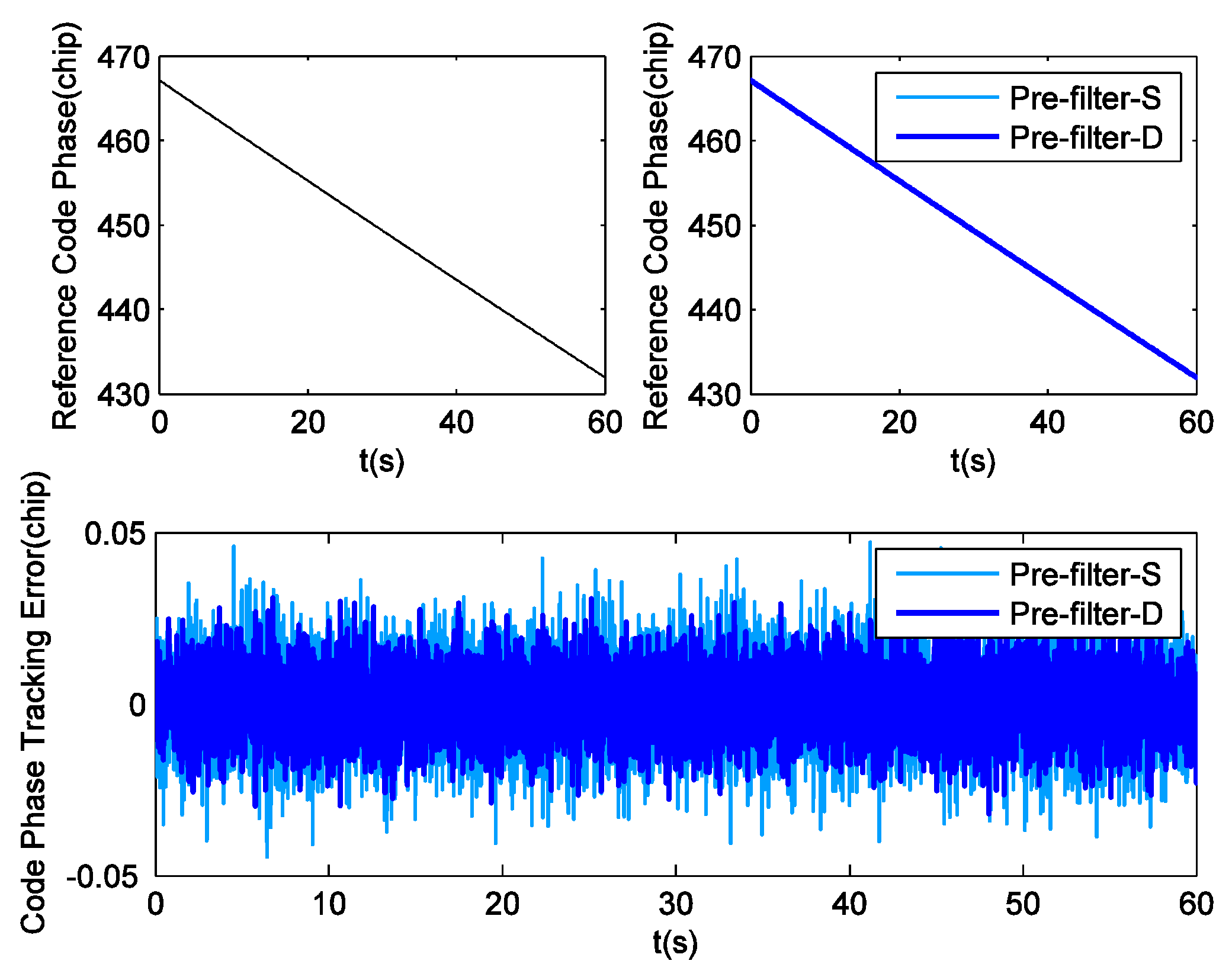
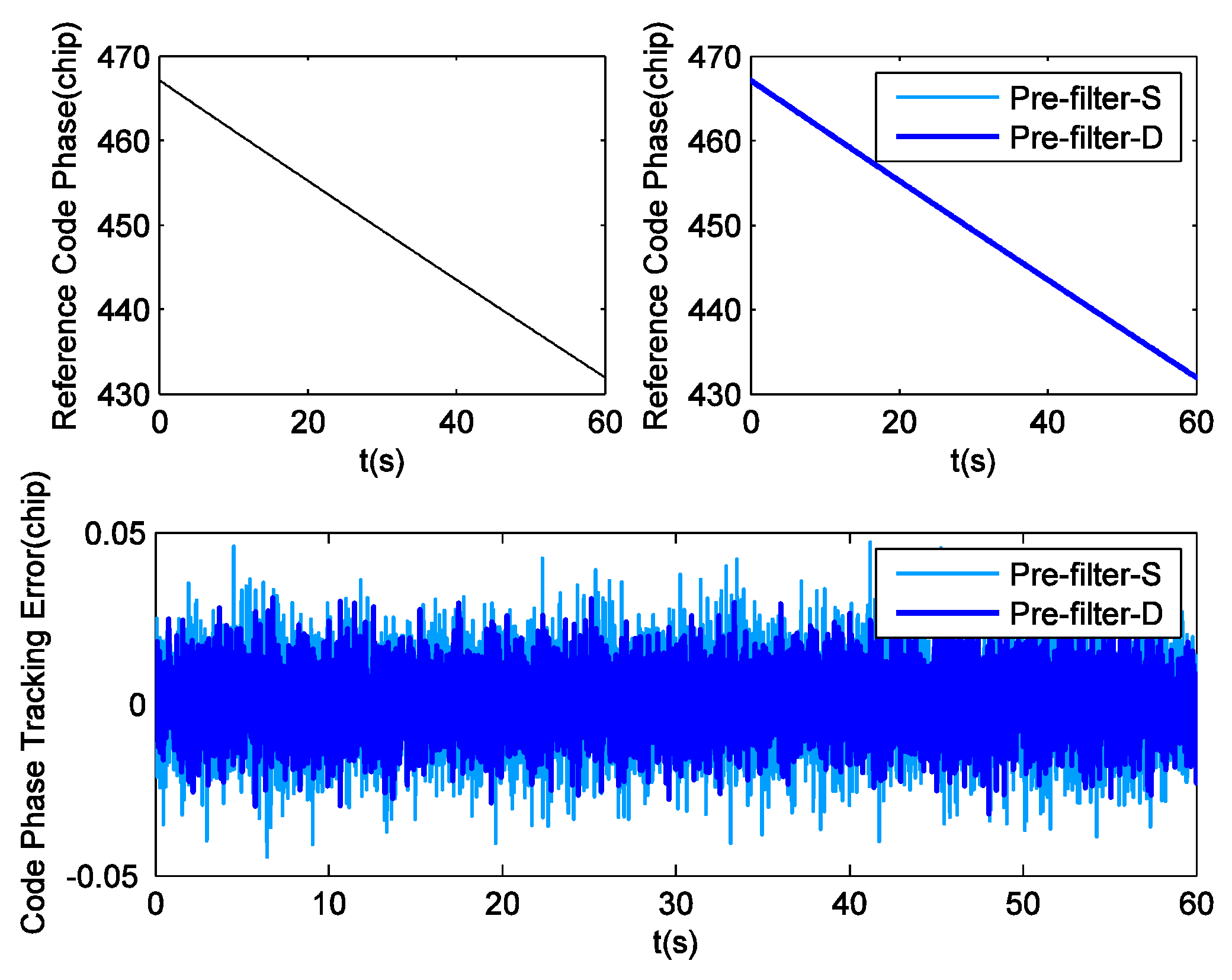
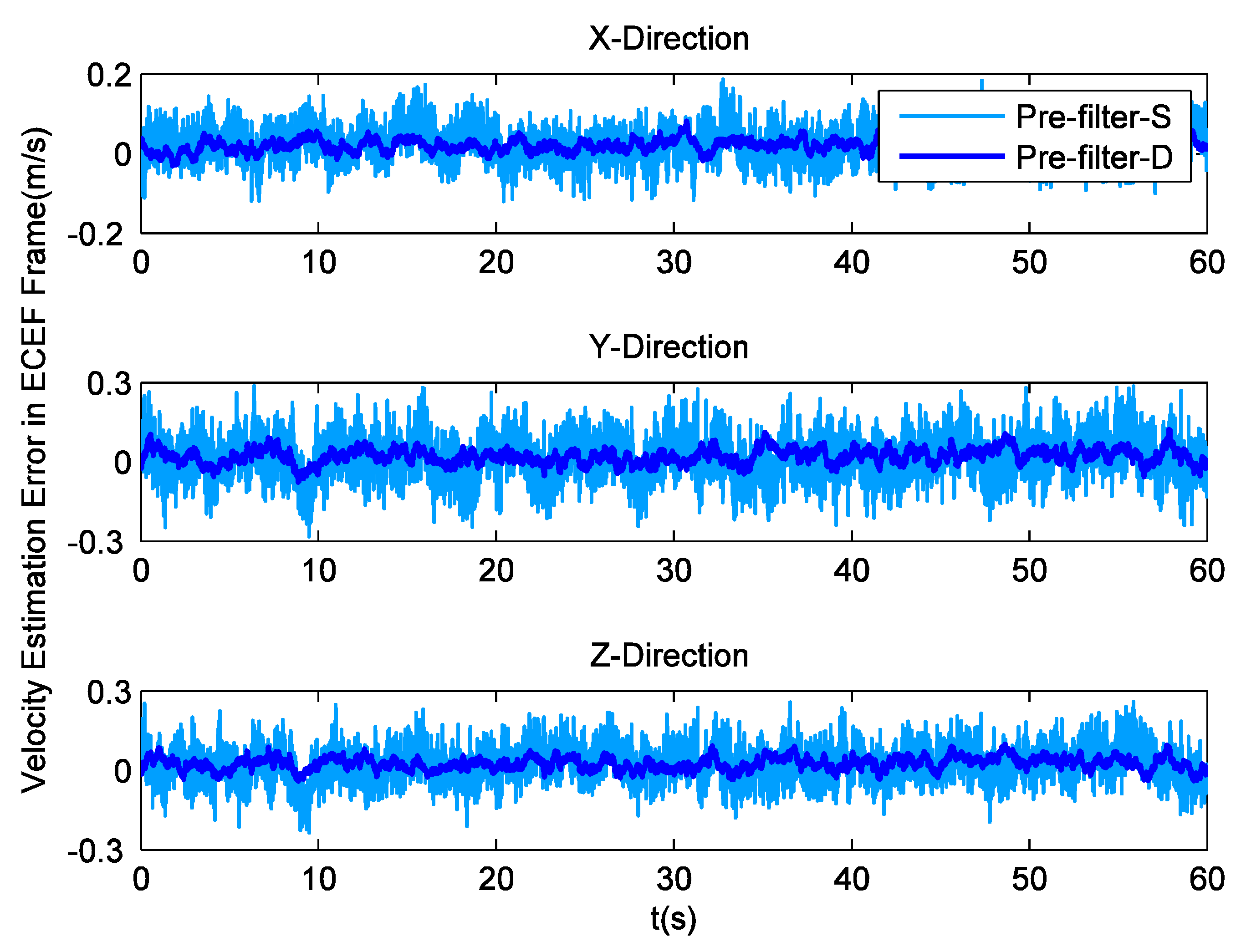
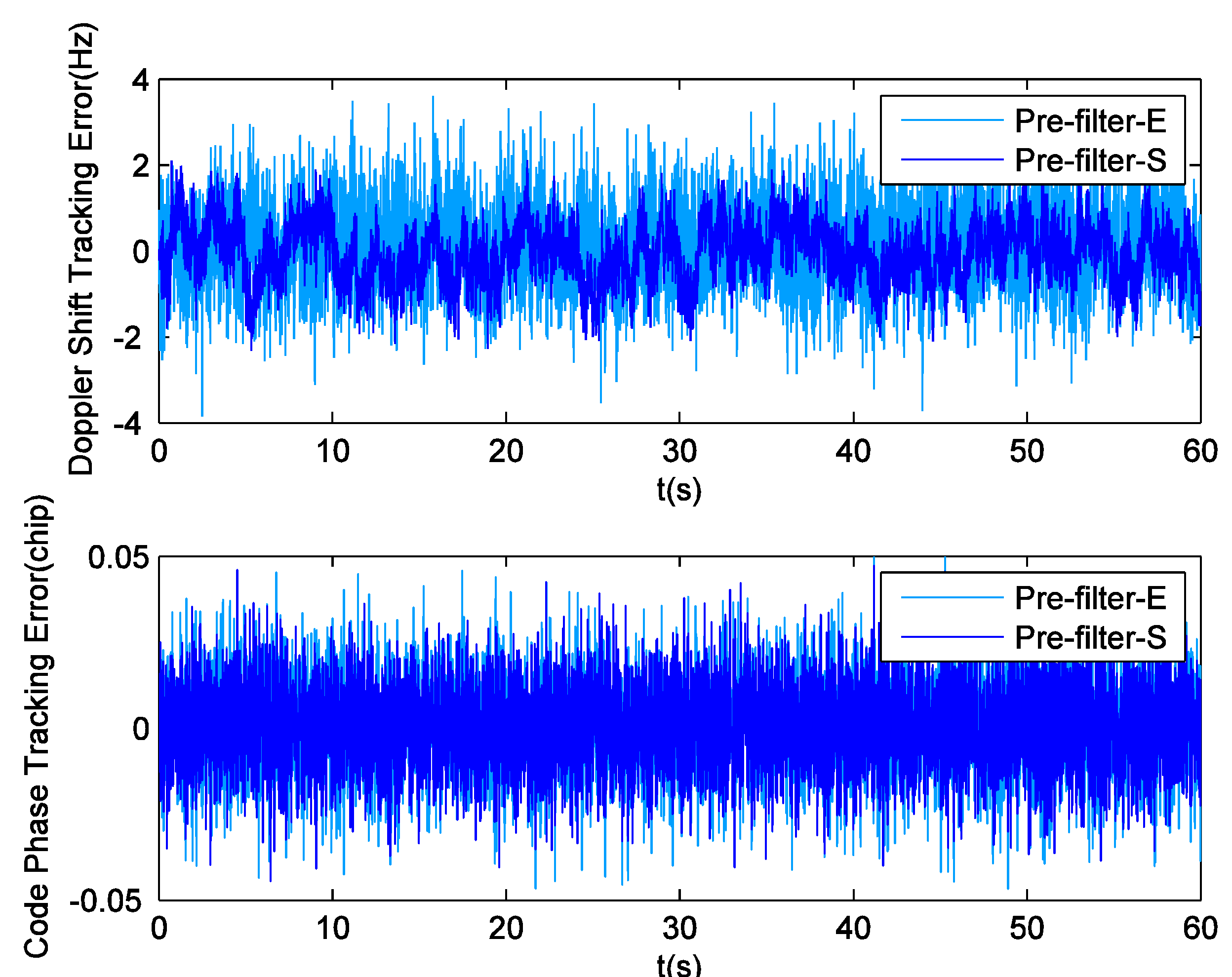
This paper proposes a baseband signal preprocessing model, which has two pre-filters and uses state feedback values to control the generation of local carrier and code. Compared with the conventional approach based on a single-filter structure, this model limits the impact of code phase error on carrier tracking, and hence enables the receiver to achieve better navigation precision. Furthermore, this model can ensure the stationarity of the estimation of input carrier frequency, even in the case of local carrier frequencies with wide fluctuation. In fact, compared with a popular error-state pre-filter, even pre-filter-S proposed in this paper performs better in the tracking domain due to the benefits of state feedback.
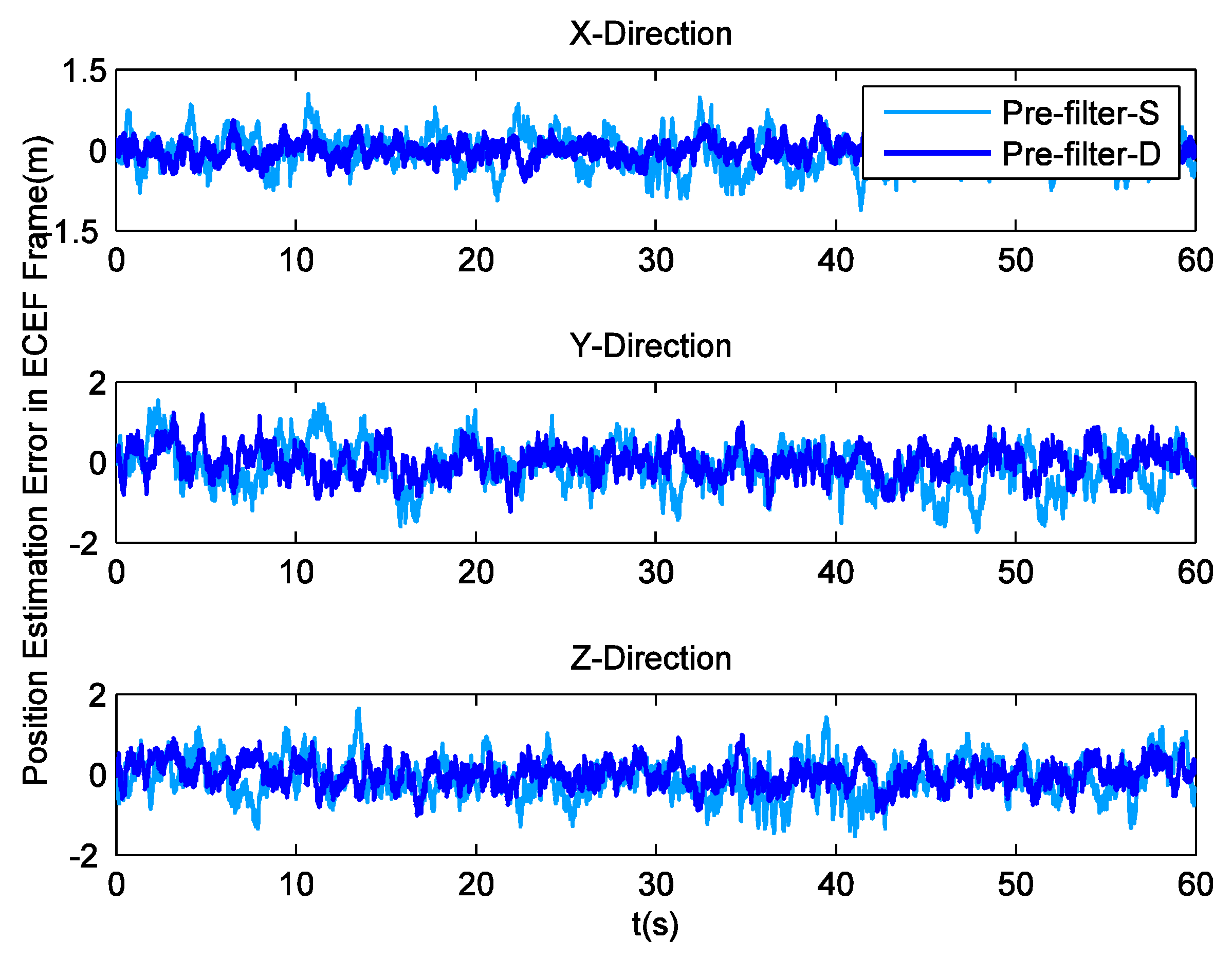
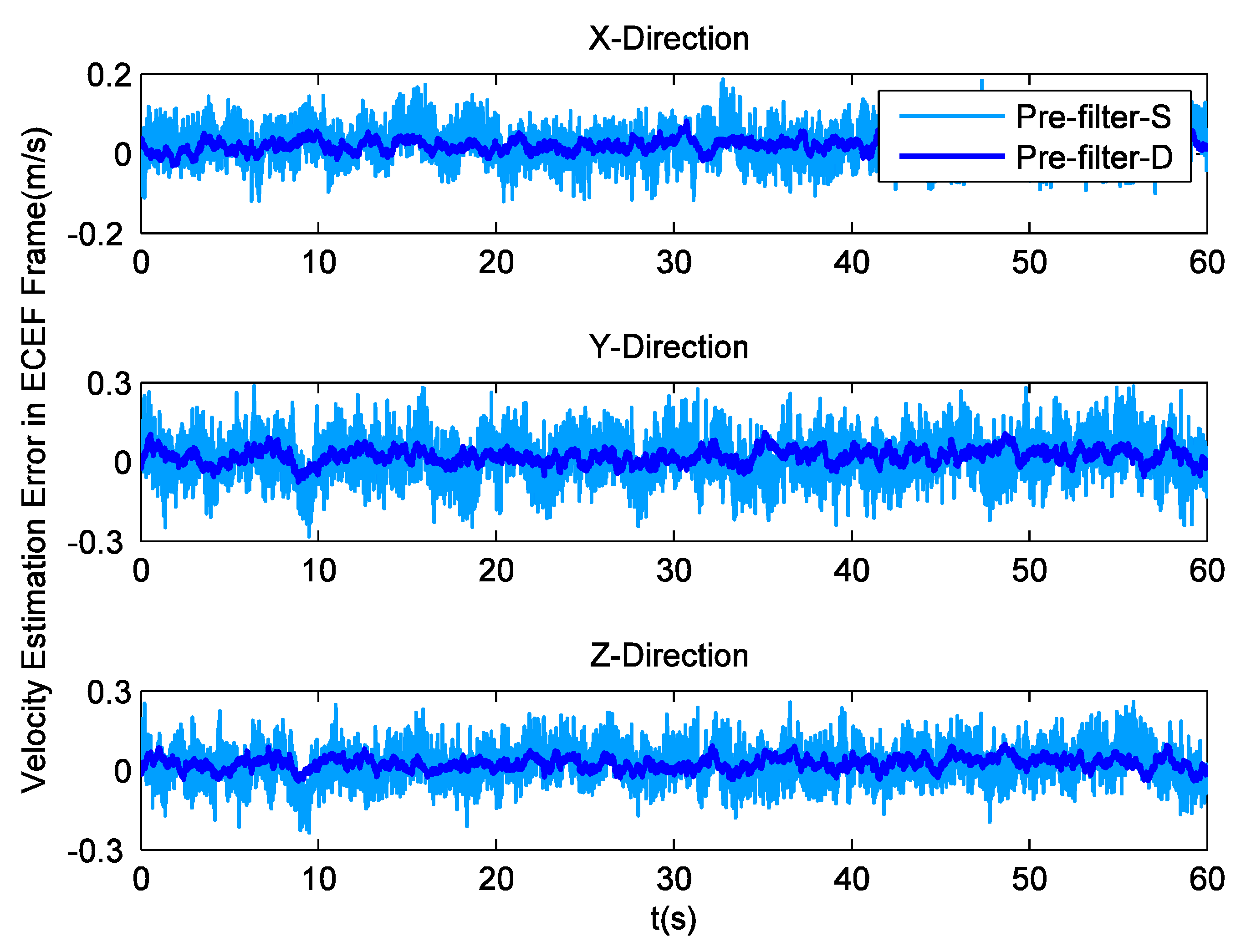
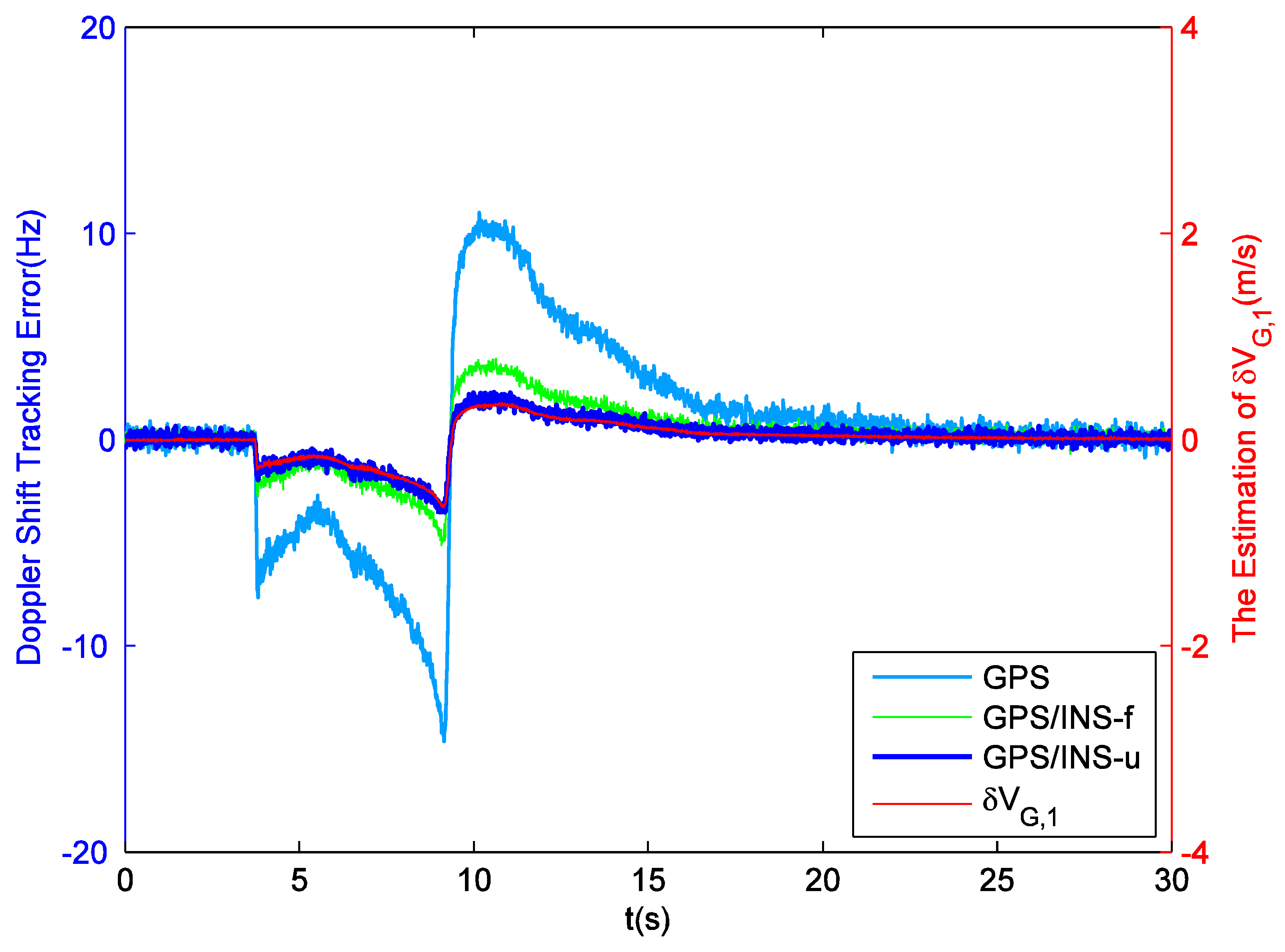
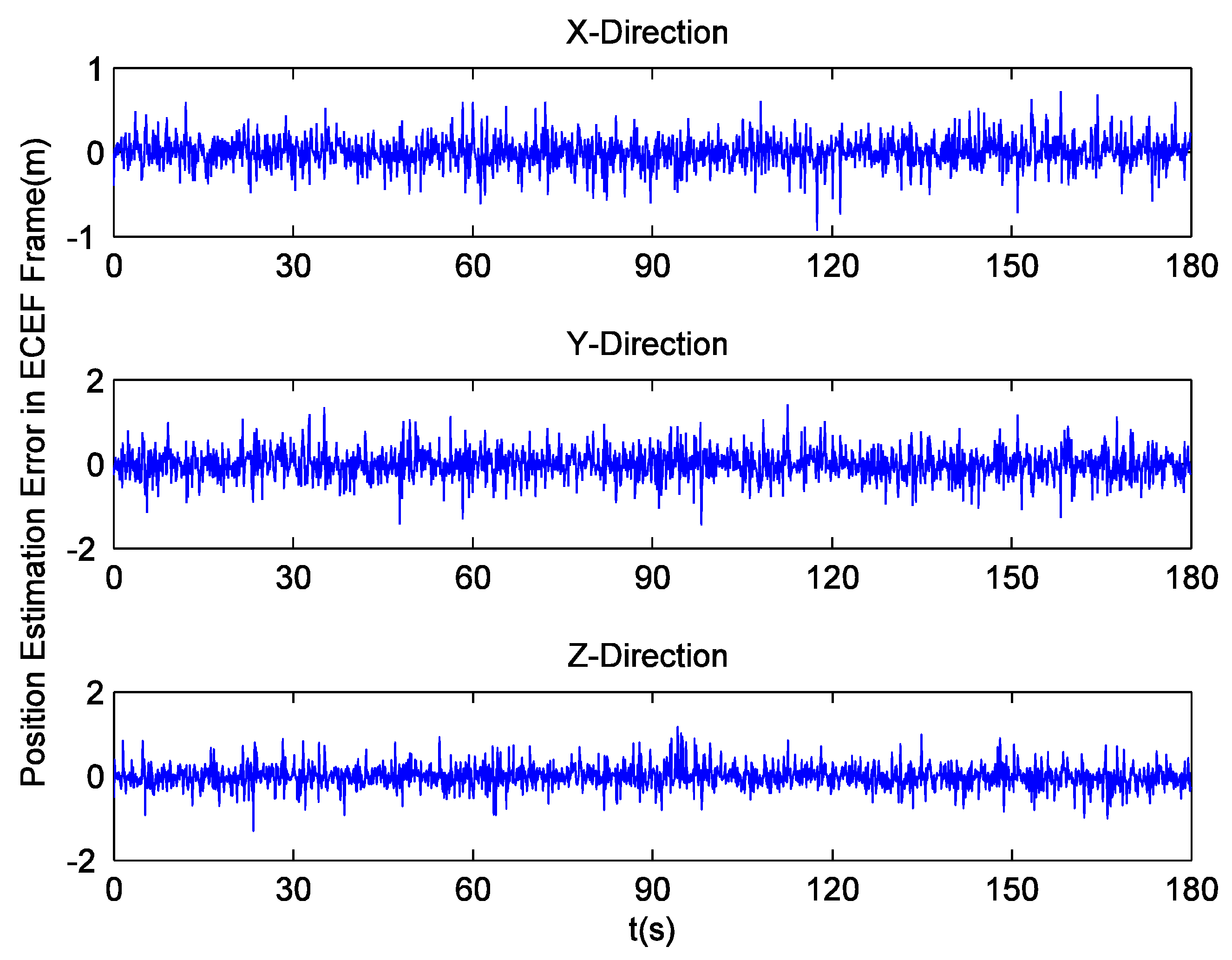
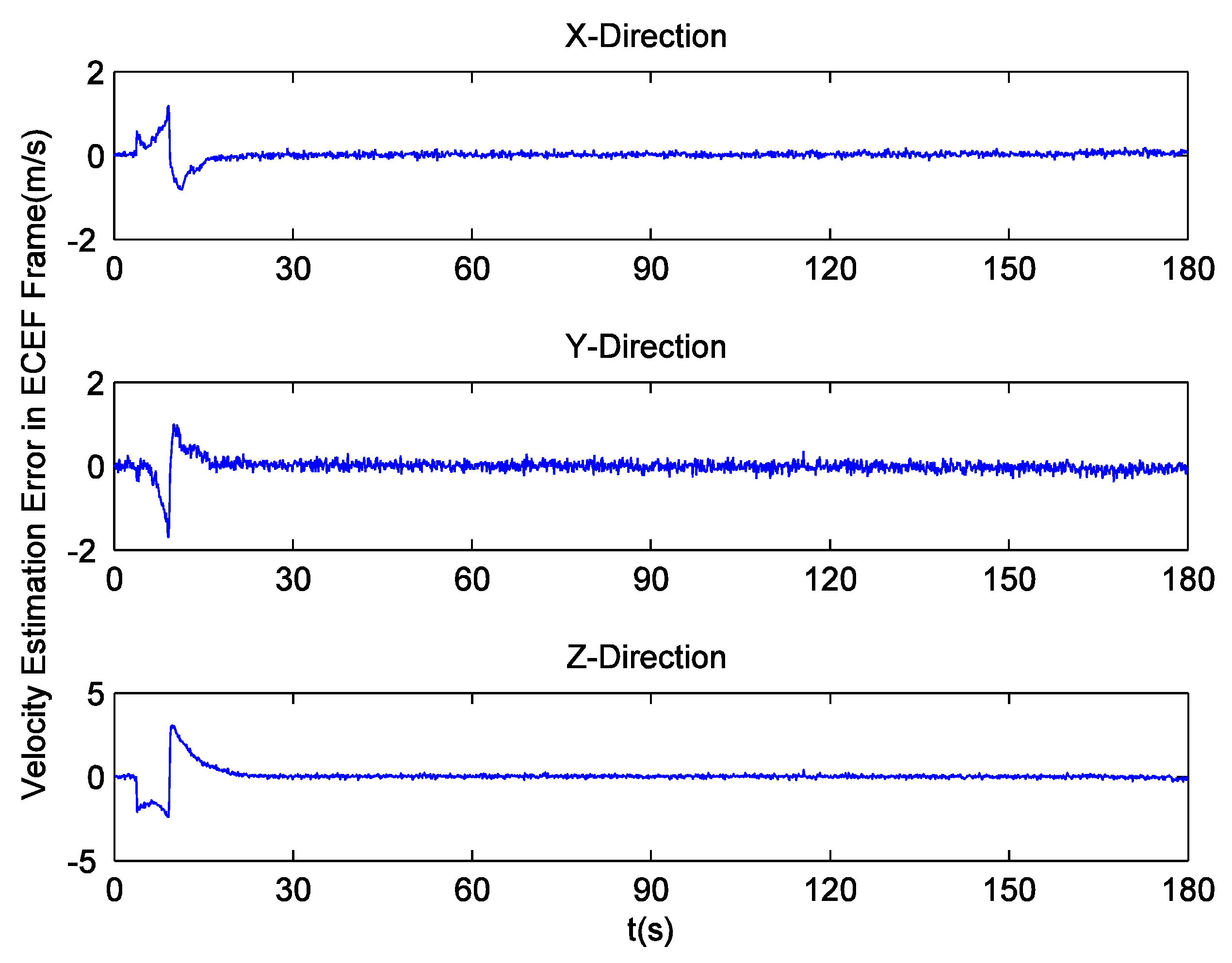
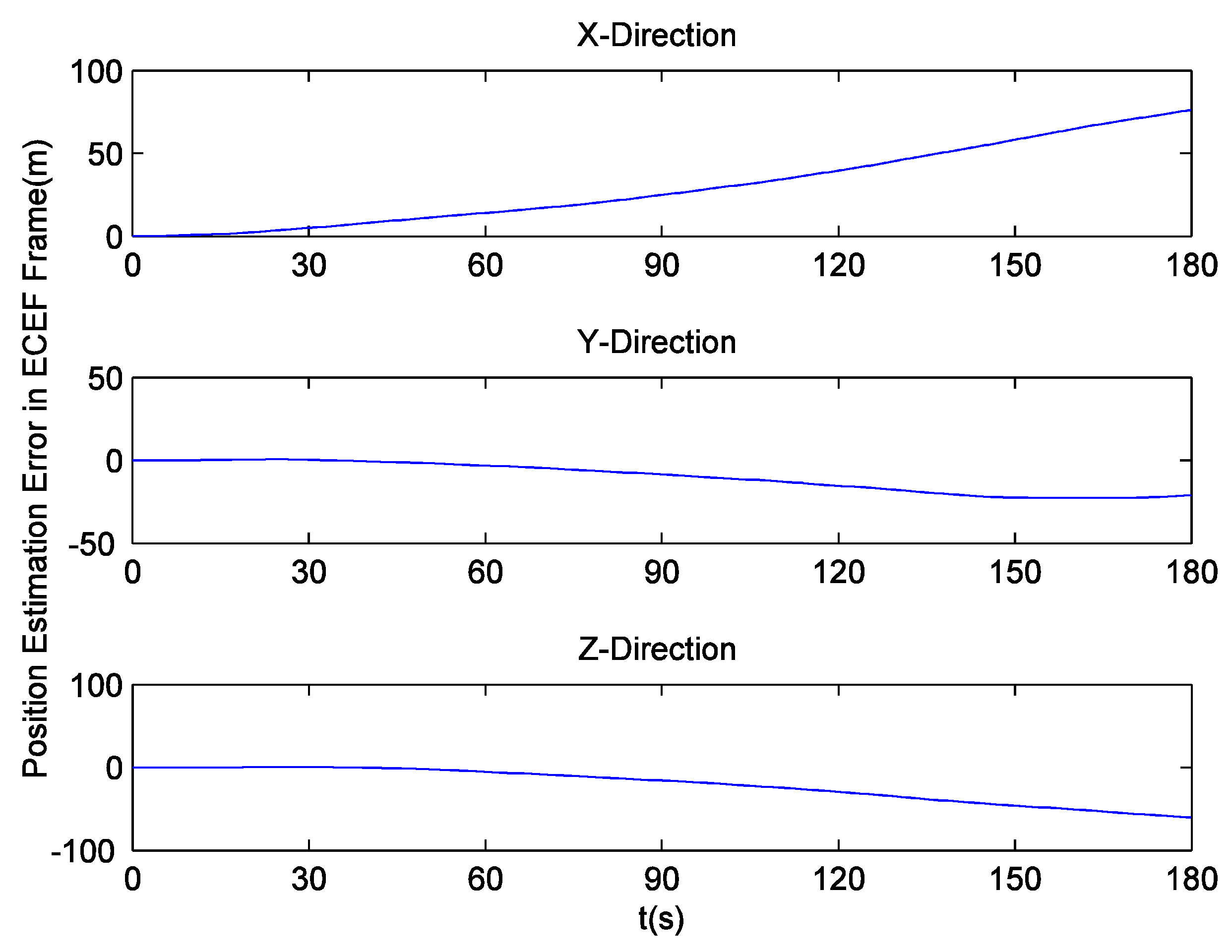
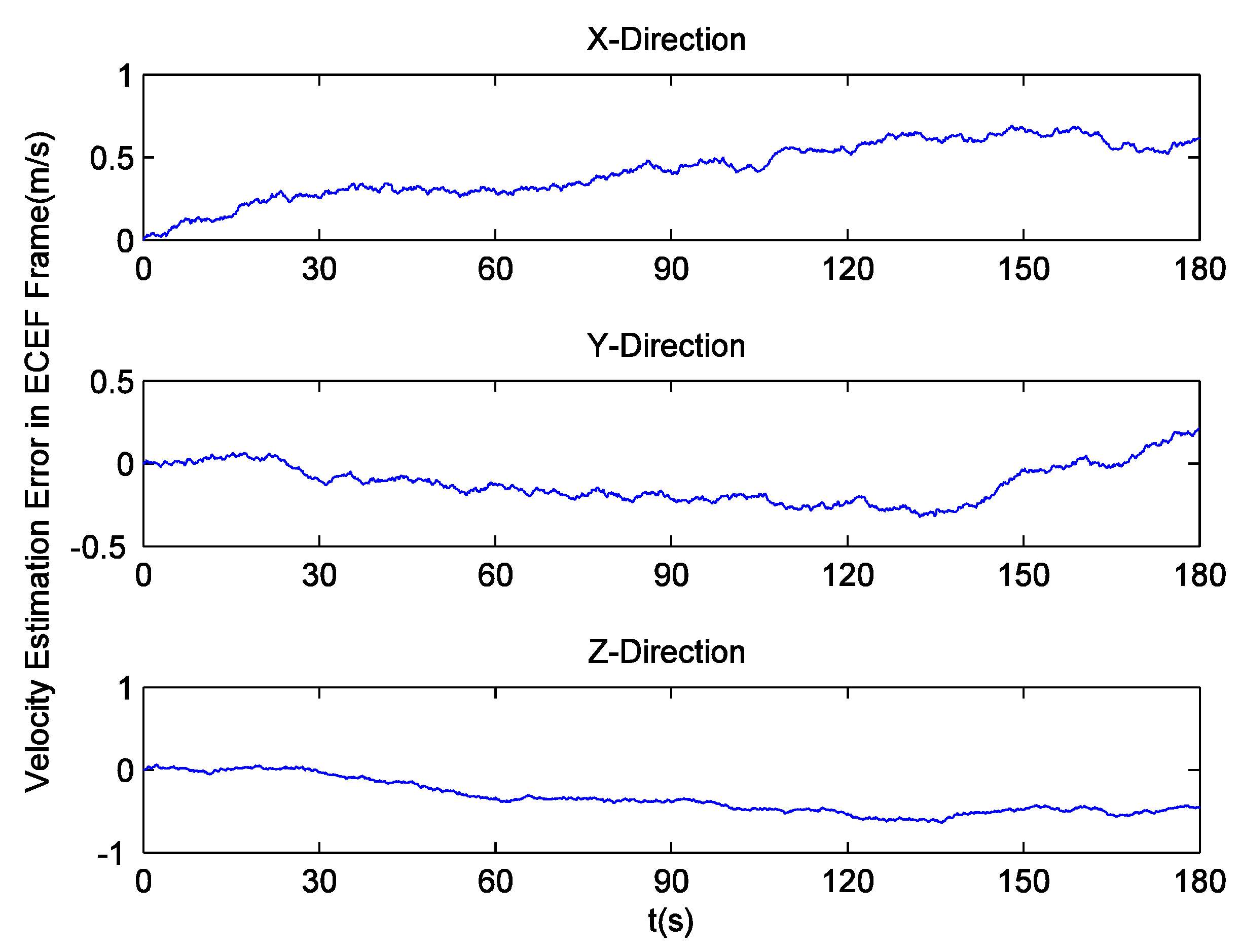
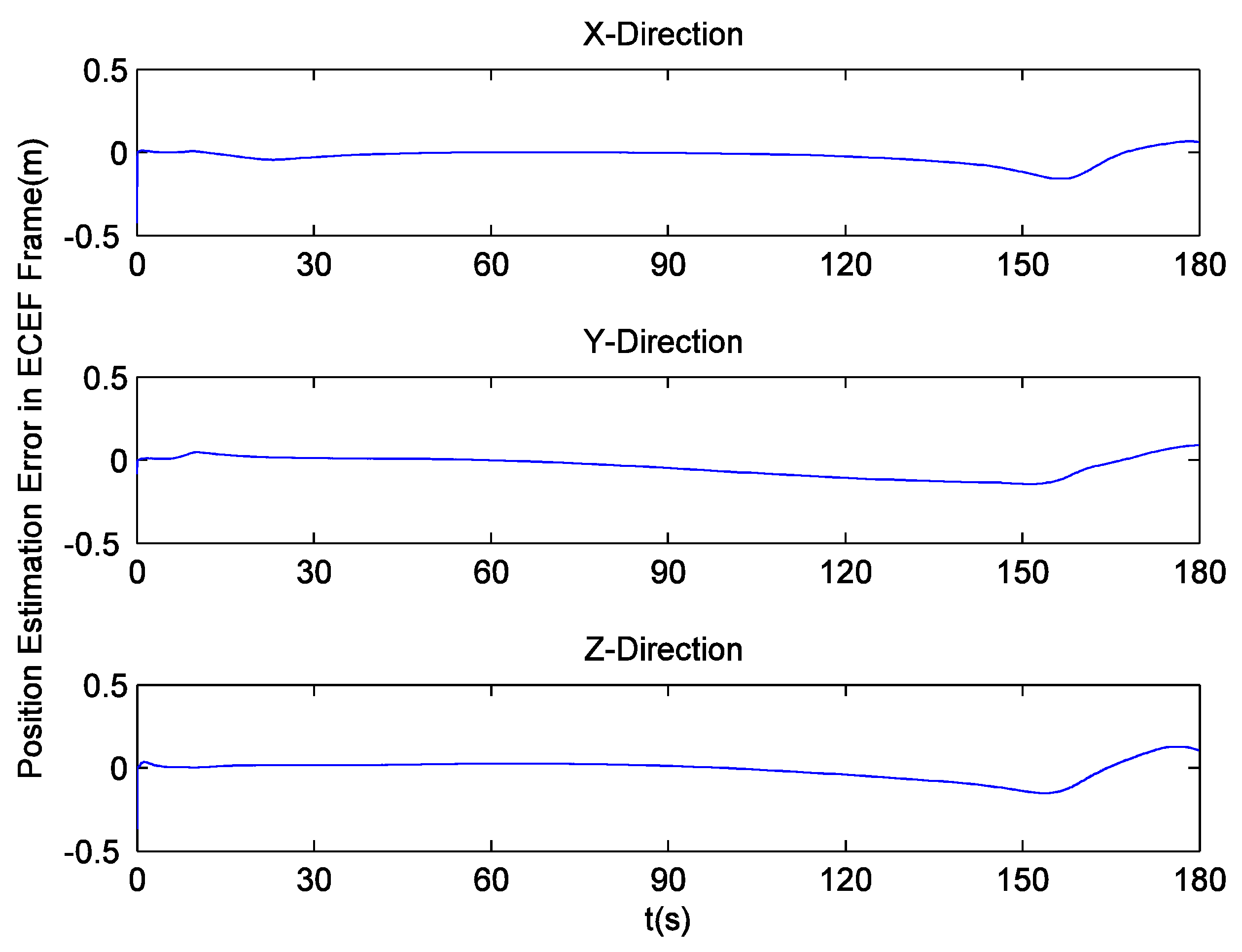
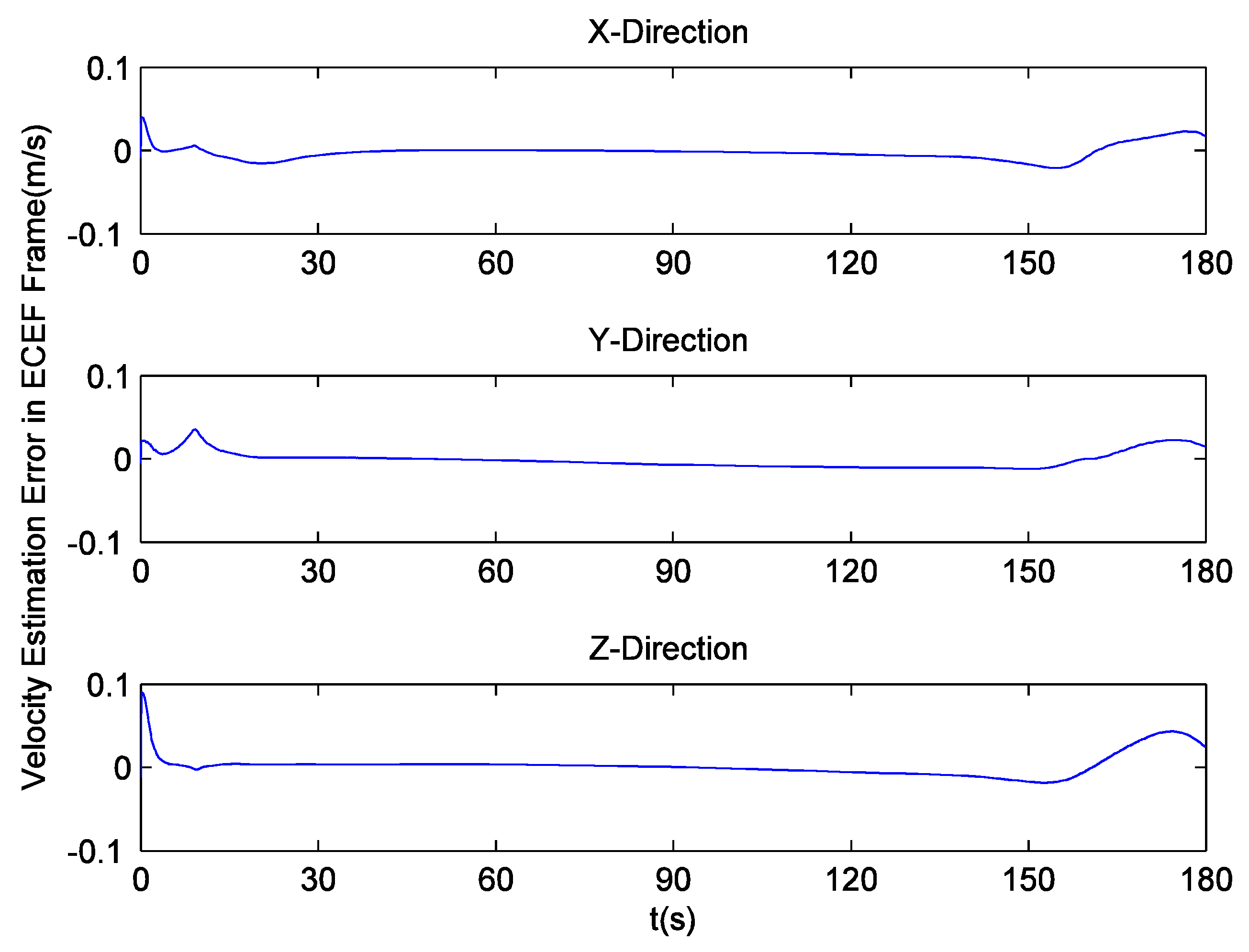
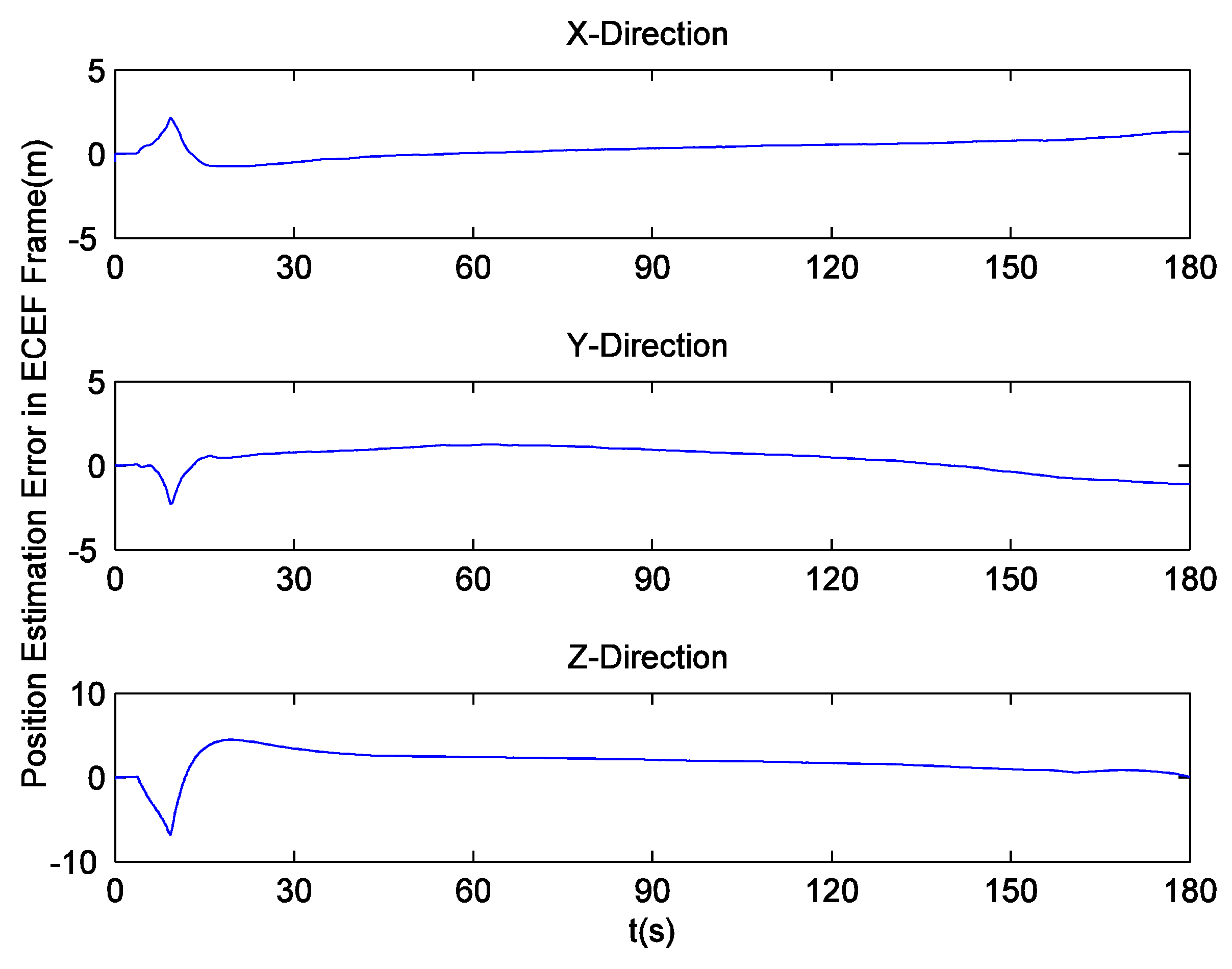
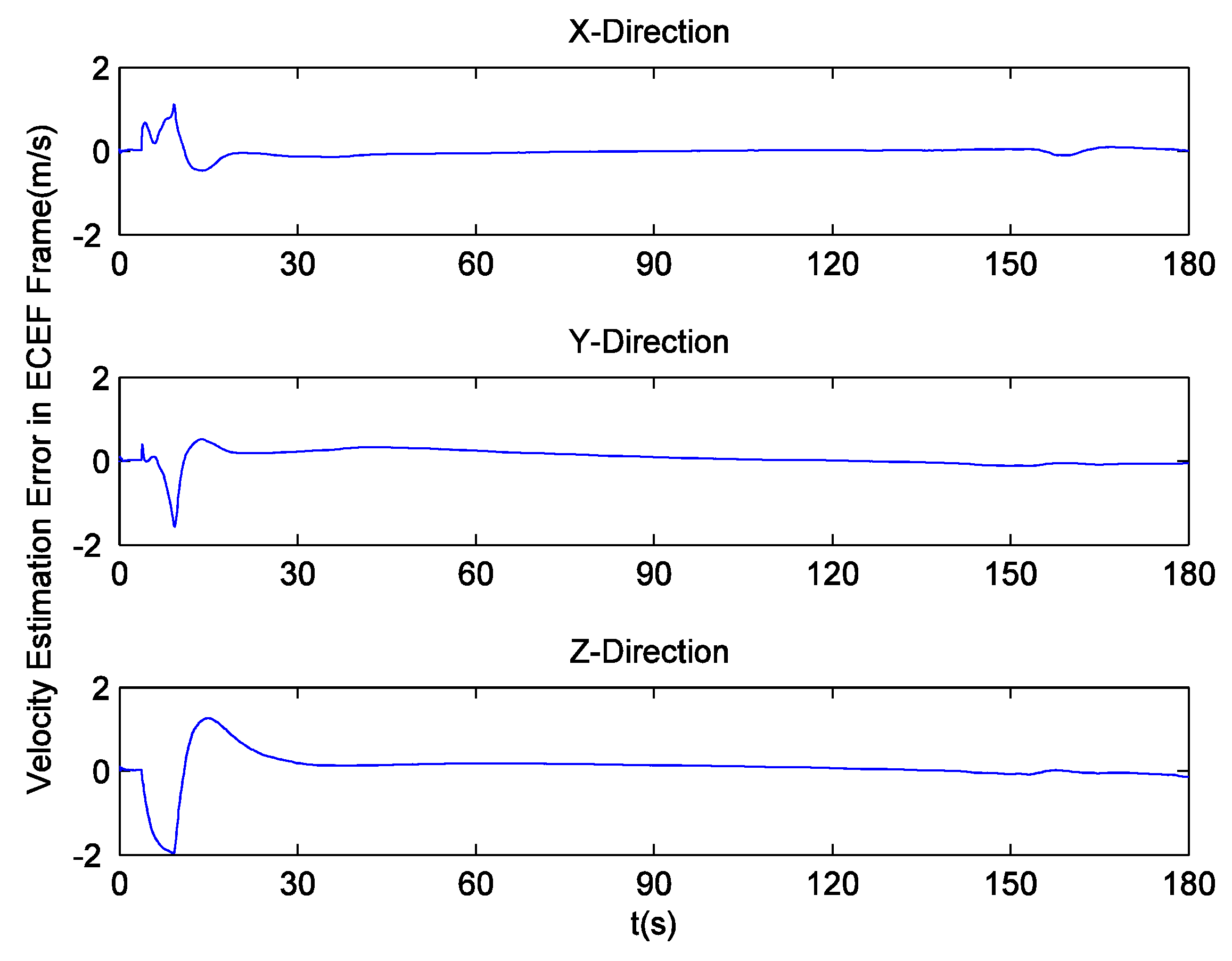
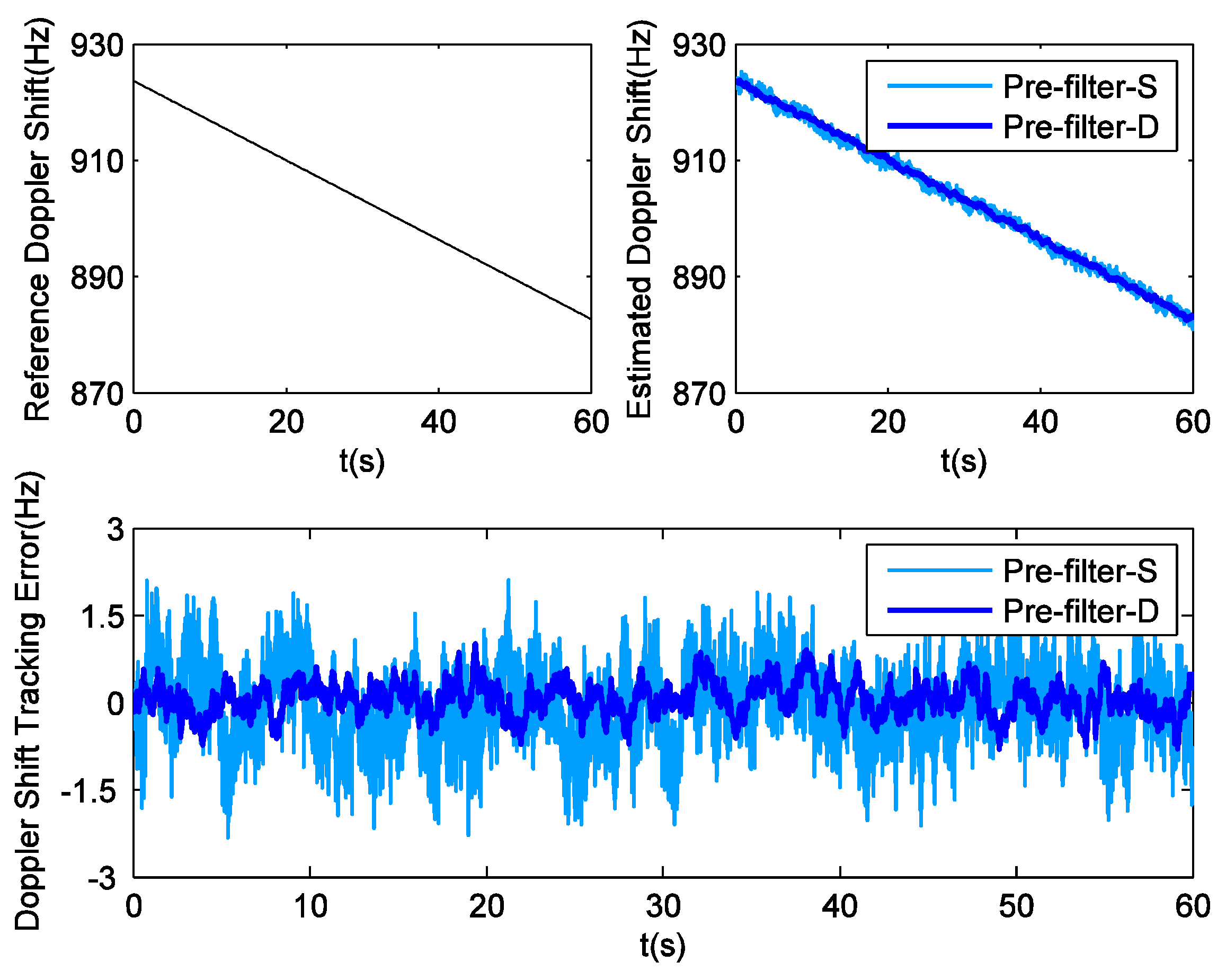
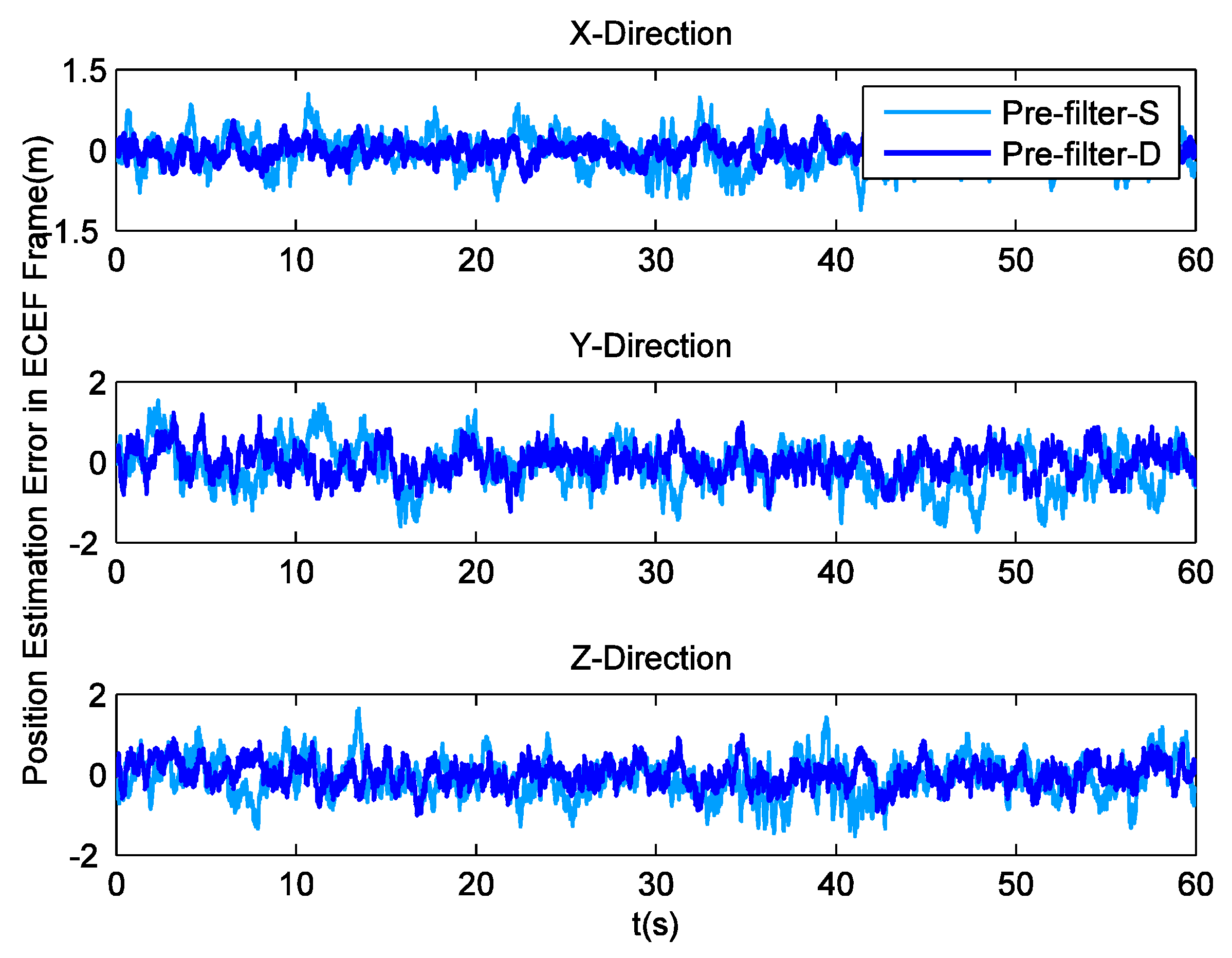
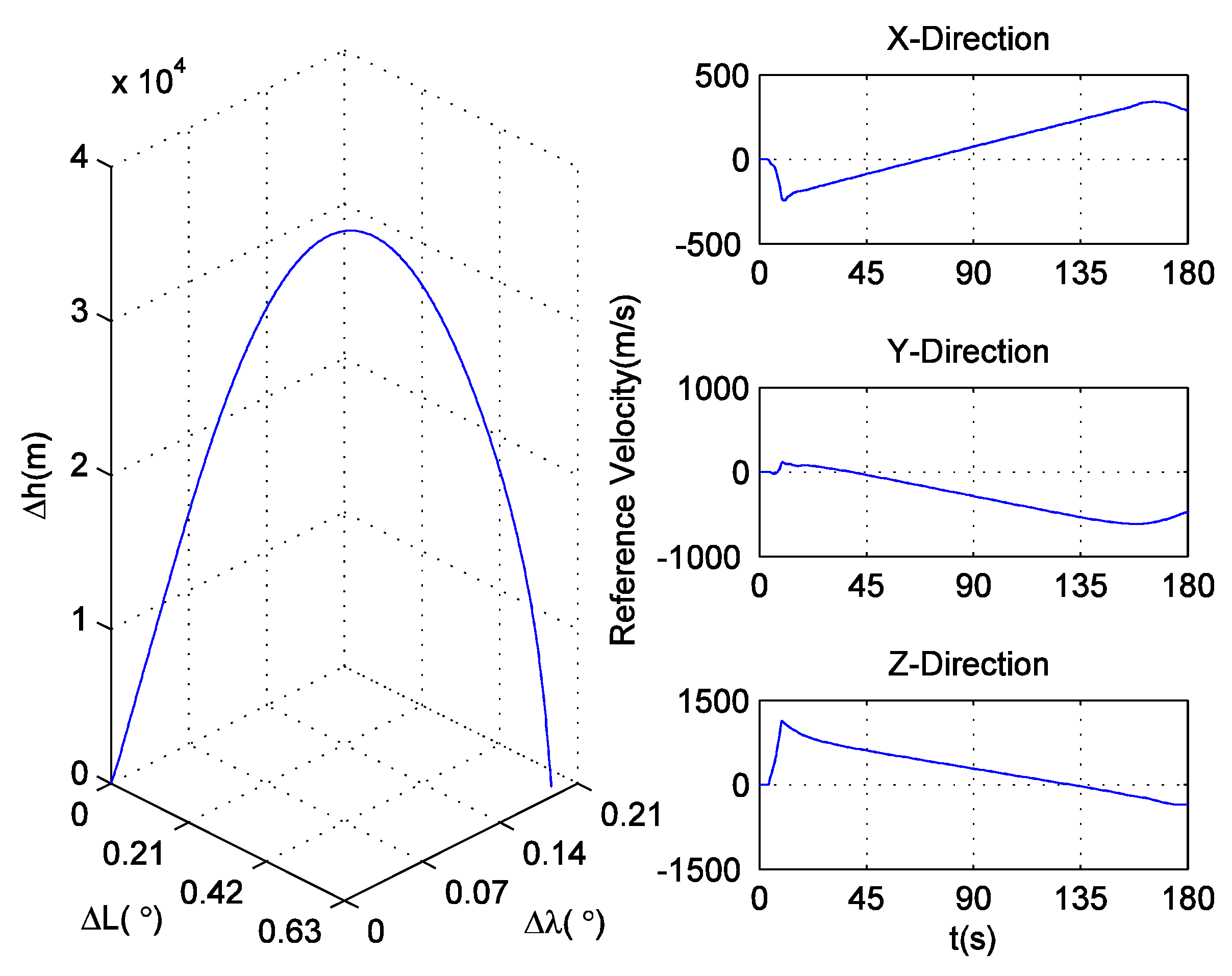
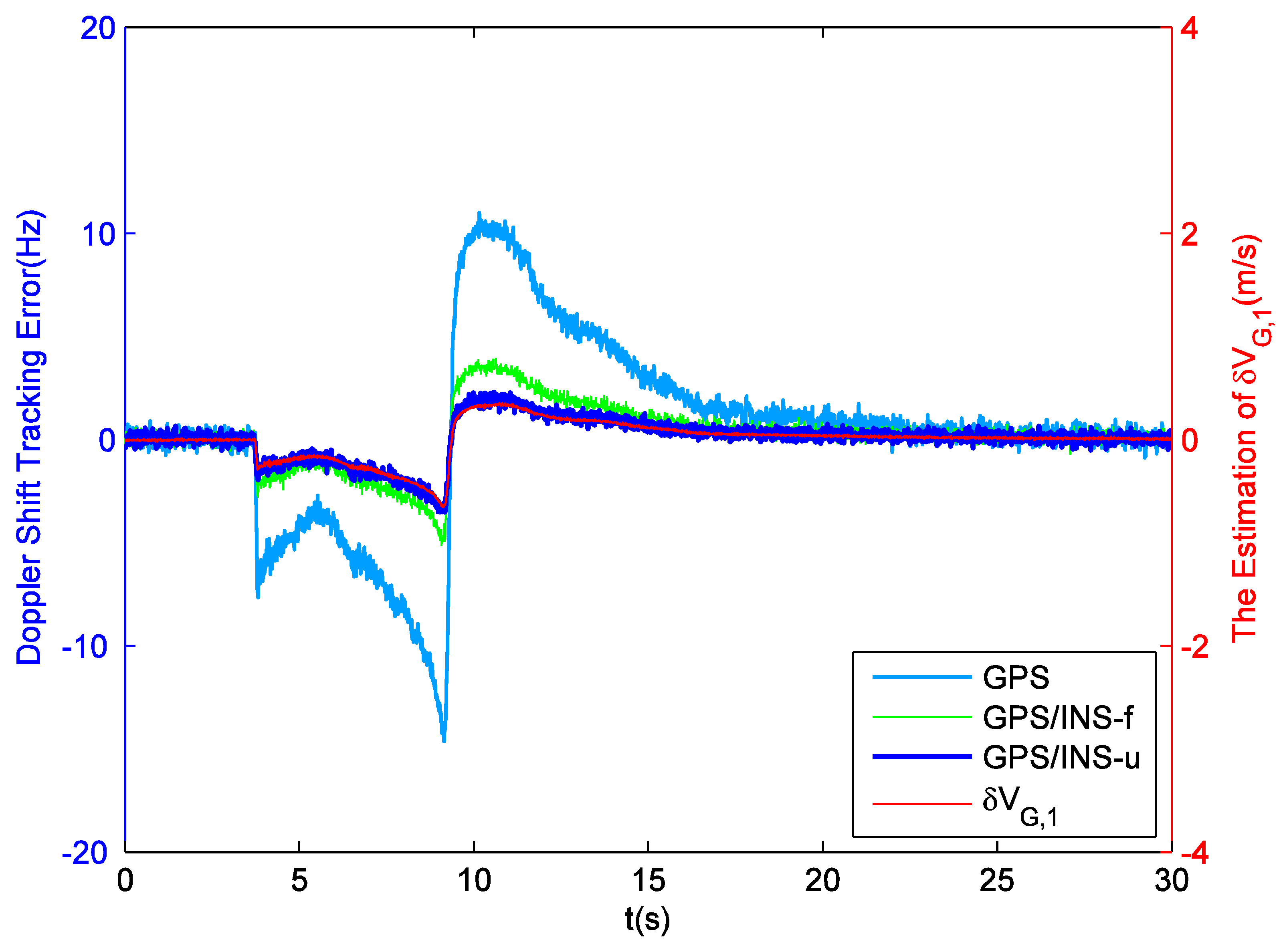
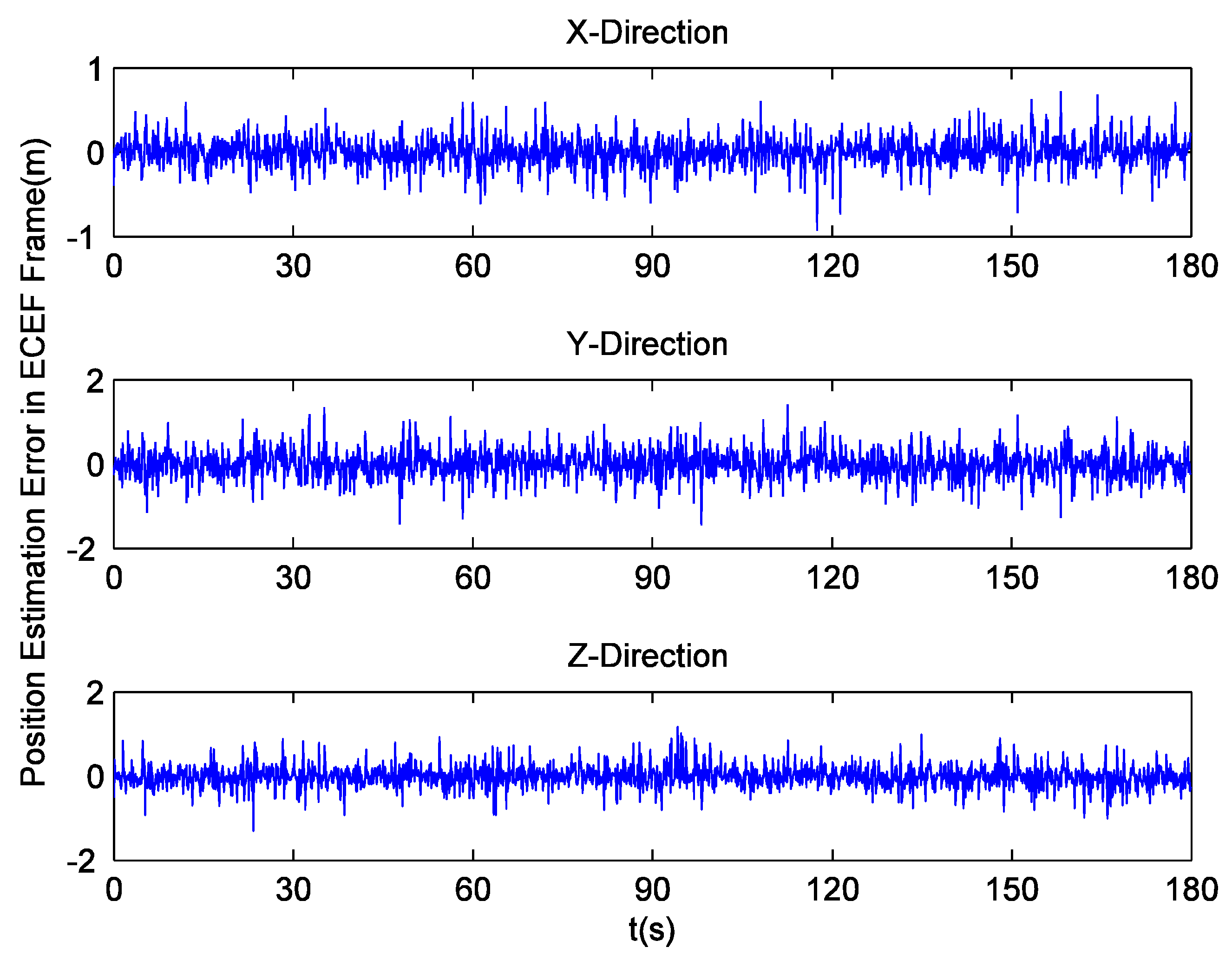
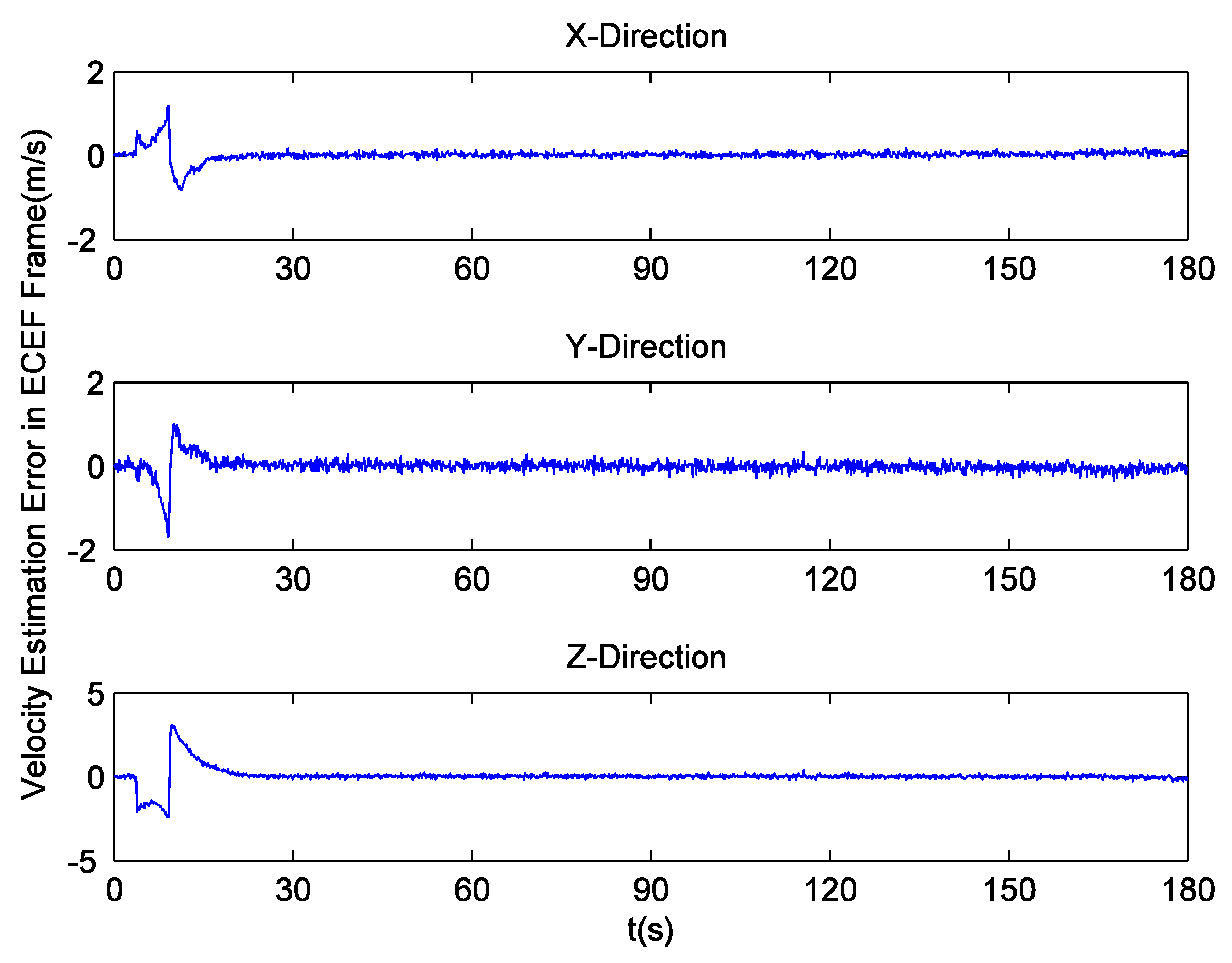
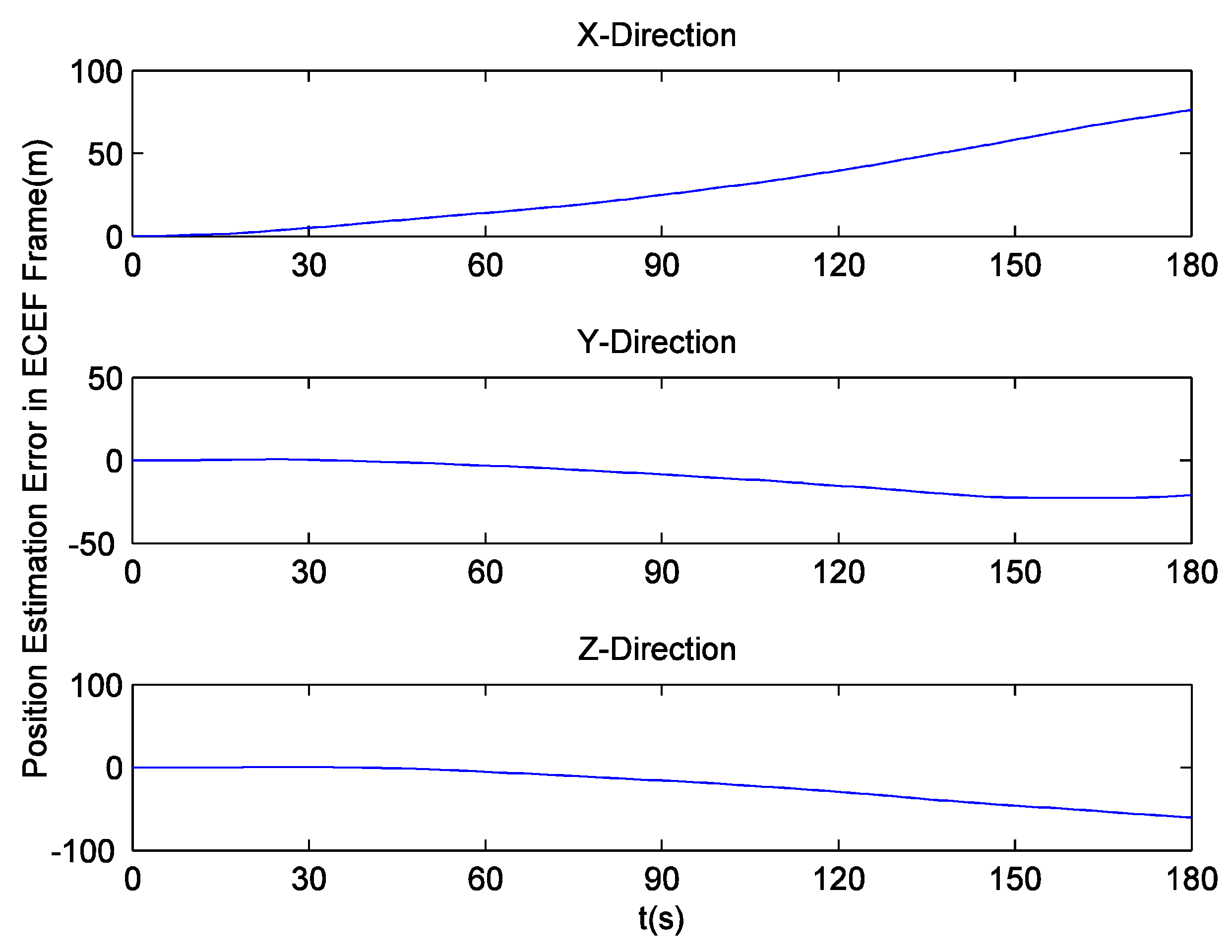
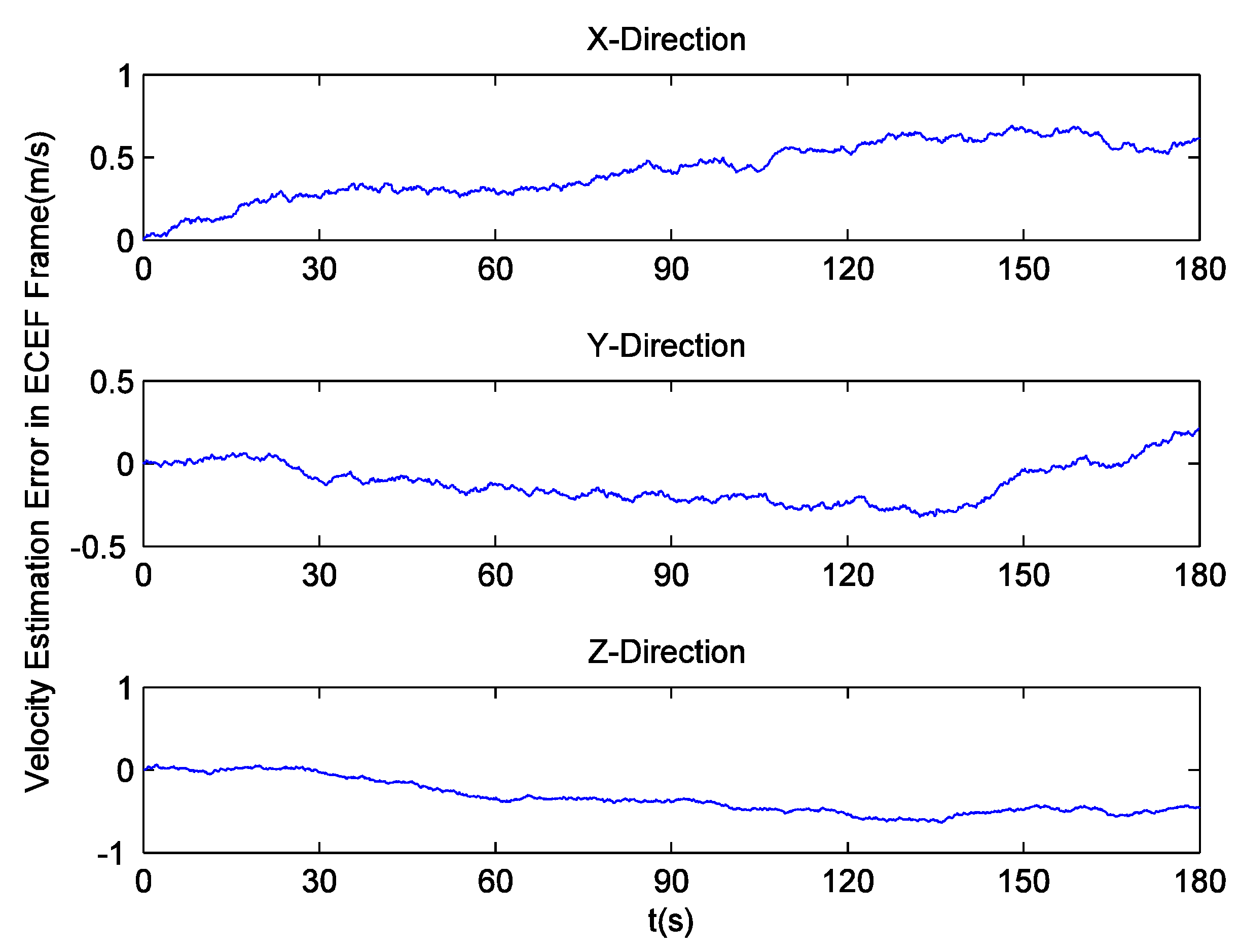
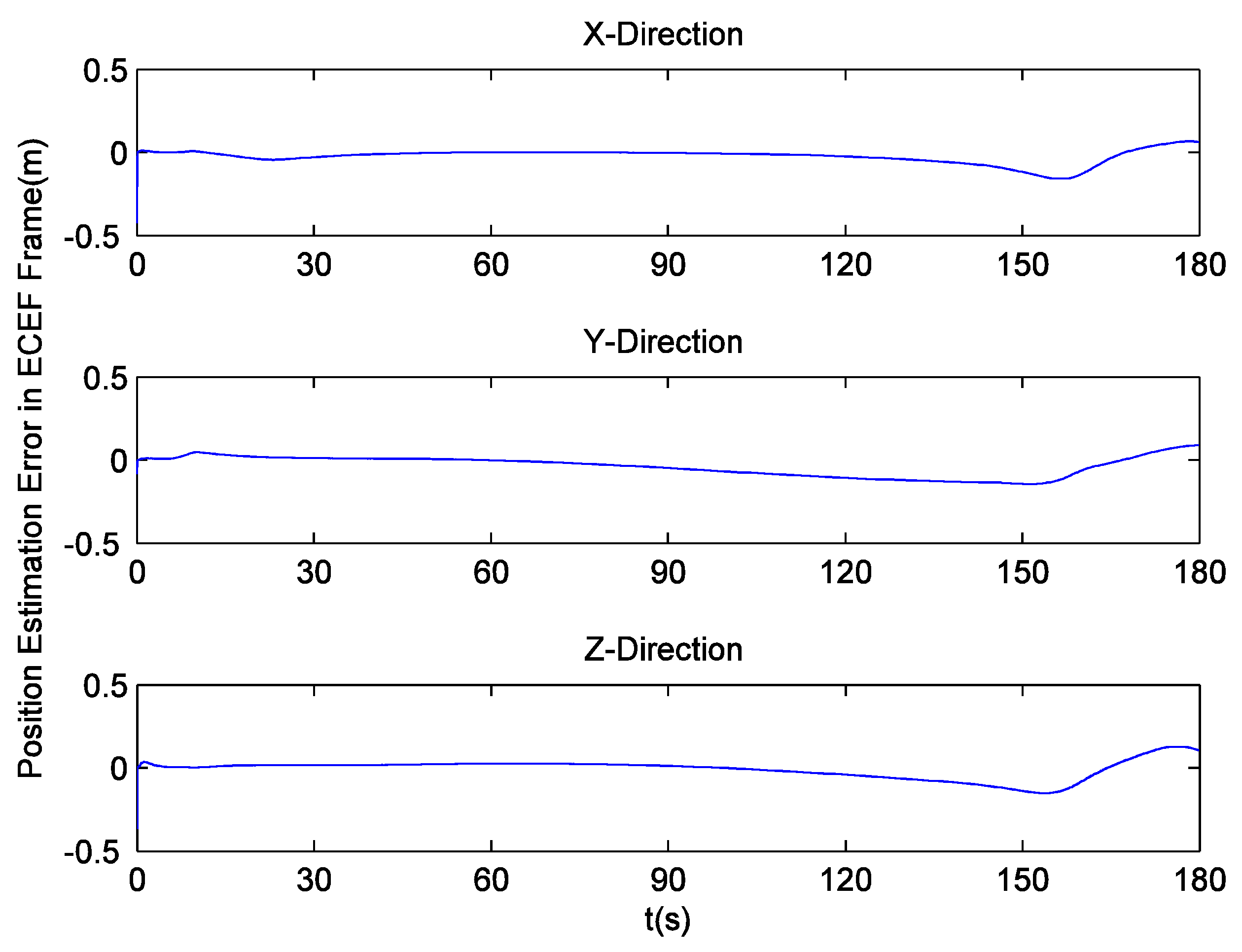
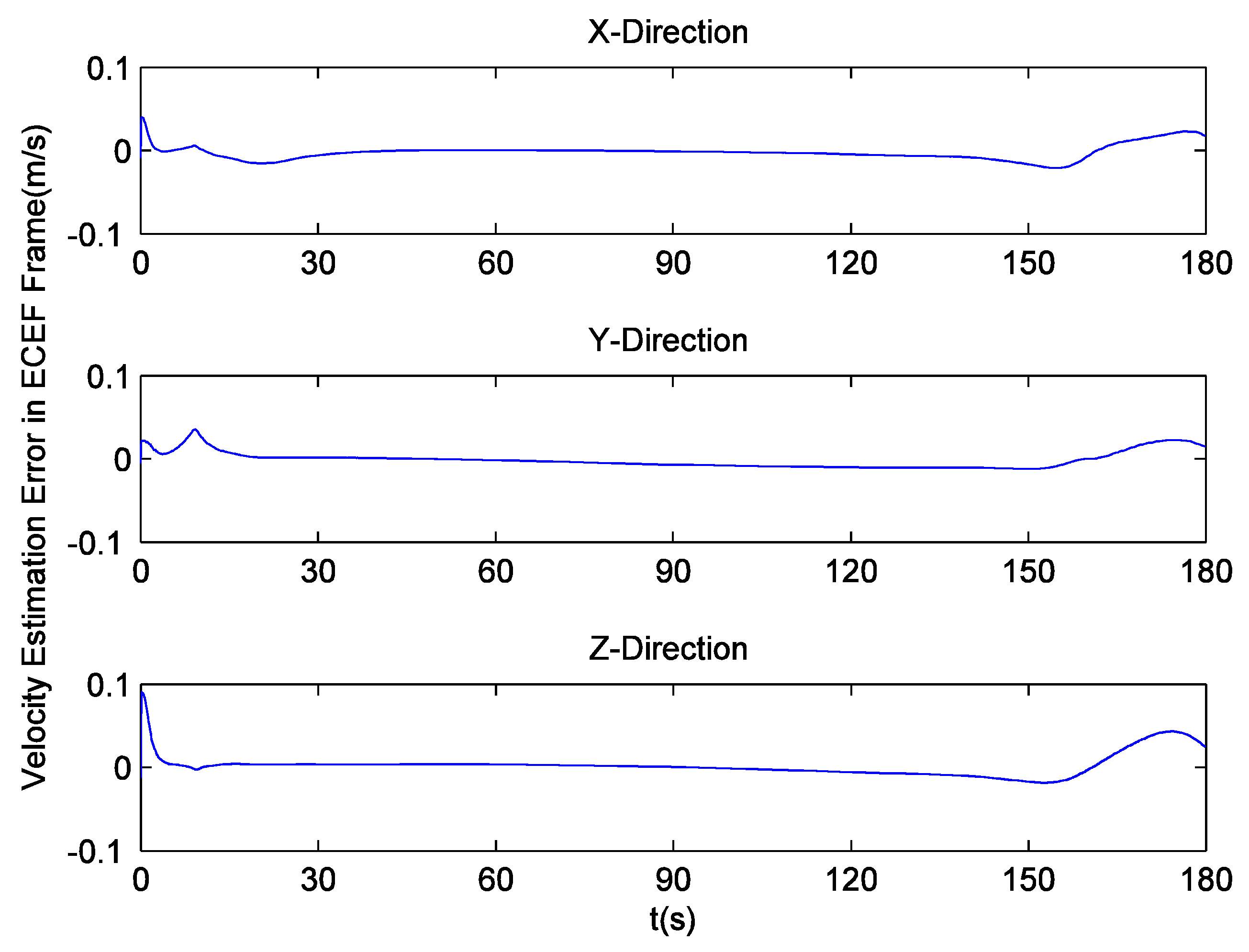
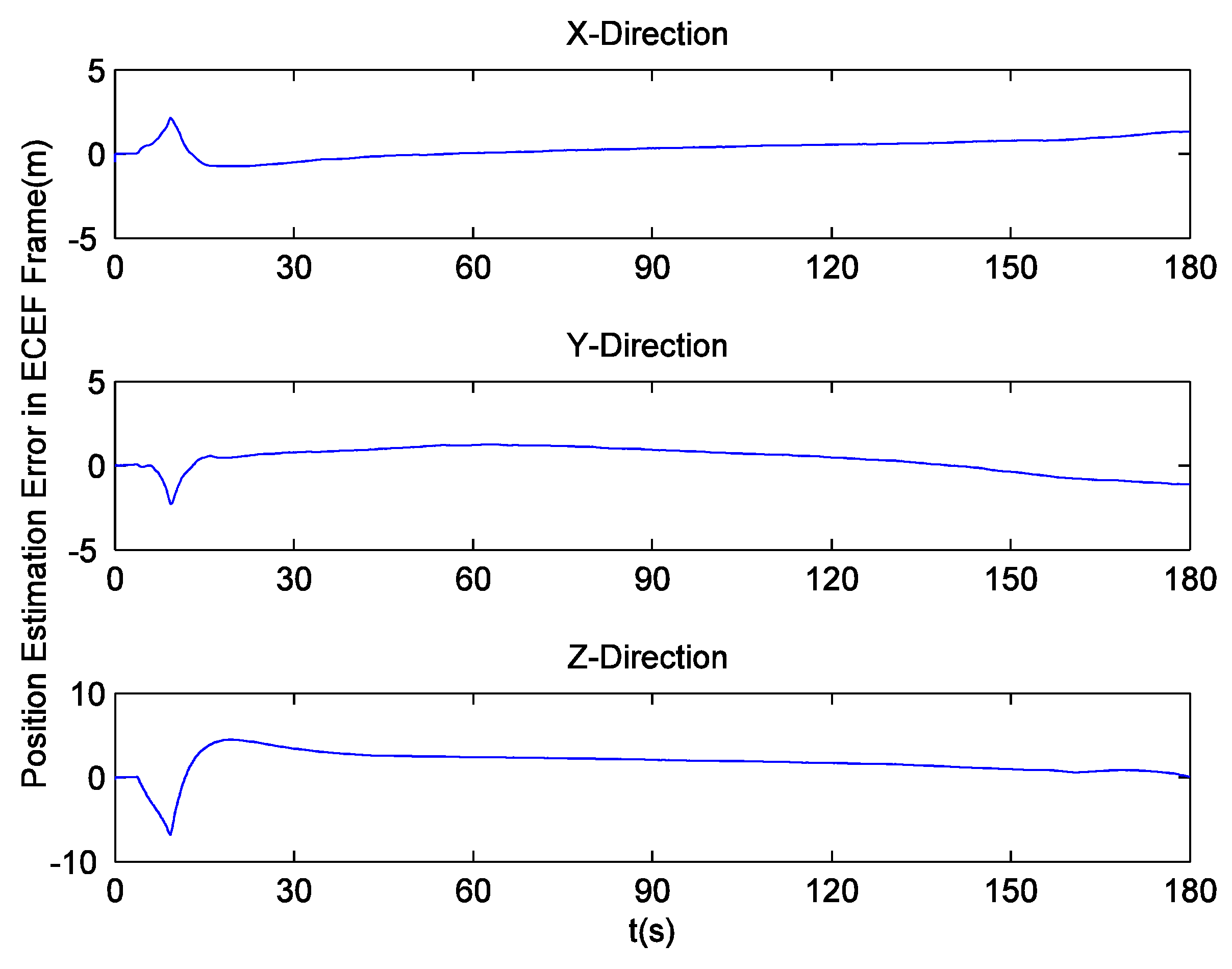
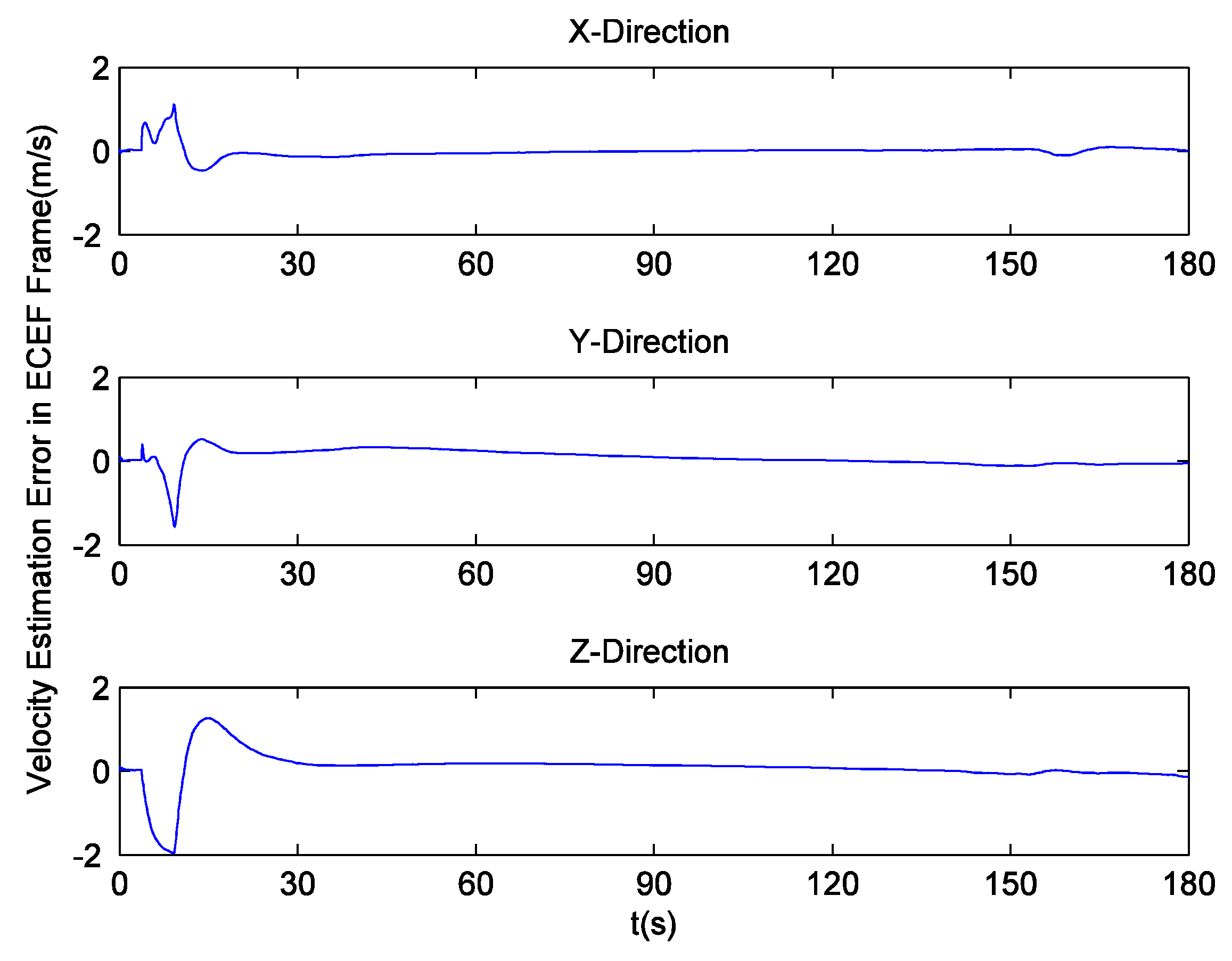
To further promote the tracking and navigation performance, a specific ultra-tight GPS/INS integration is designed on the basis of the new preprocessing model. Since the pseudorange rate estimation error in each channel has been treated as the additional state variable, the proposed navigation filter ensures the estimation of INS errors will not be contaminated. Moreover, in this integration, although the corrected inertial navigation information is used to estimate the carrier frequency, the tracking channel still aims to make the phase error return to 0 in the shortest amount of time. The results of the semi-physical simulation based on a telemetered missile trajectory indicate that navigation solutions with higher accuracy can be achieved. Meanwhile, because tracking is assisted by external navigation information, the error contained in the estimated Doppler shift can be reduced substantially.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}