
Logarithmic Laplacian Prior Based Bayesian Inverse Synthetic Aperture Radar Imaging

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
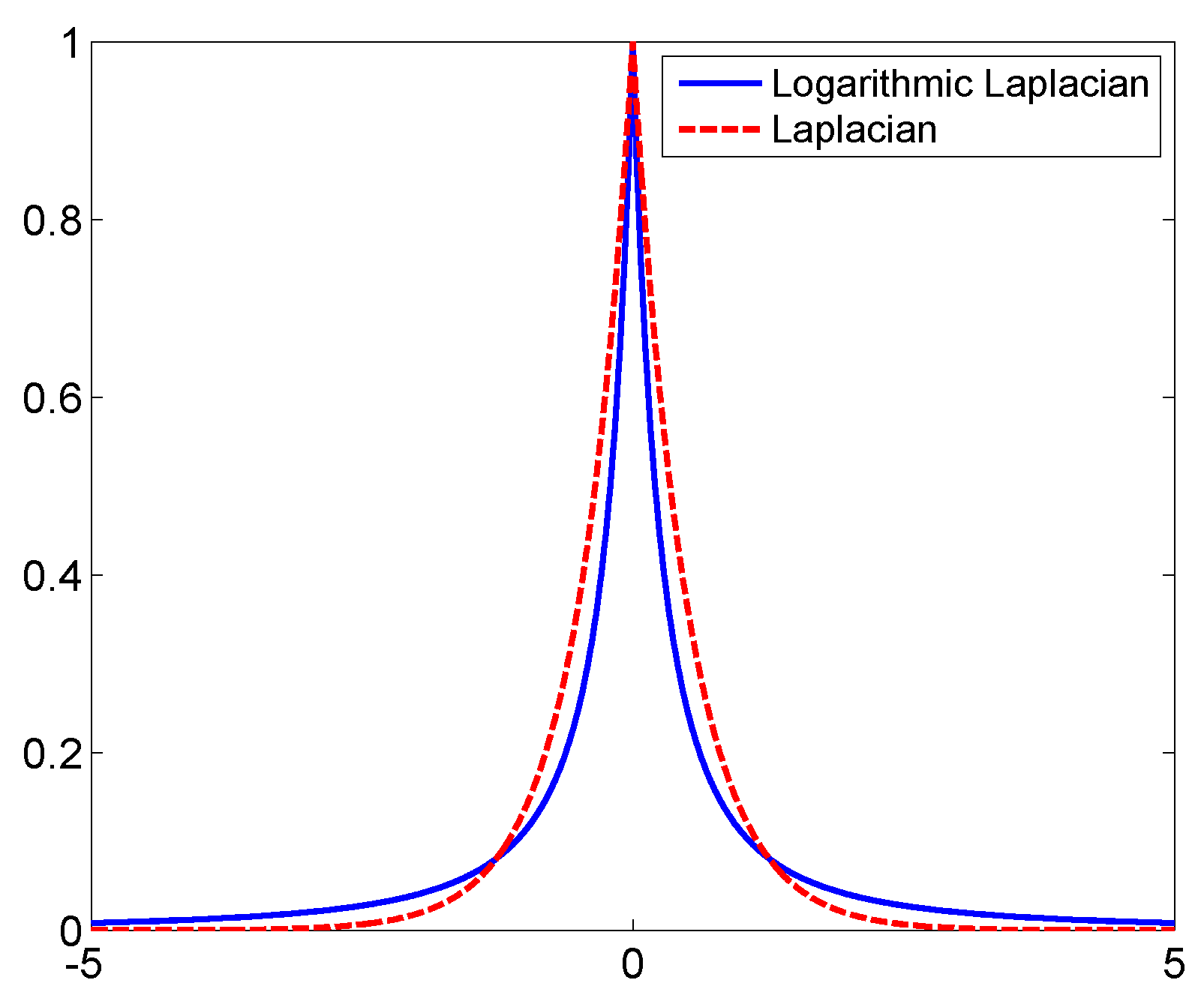
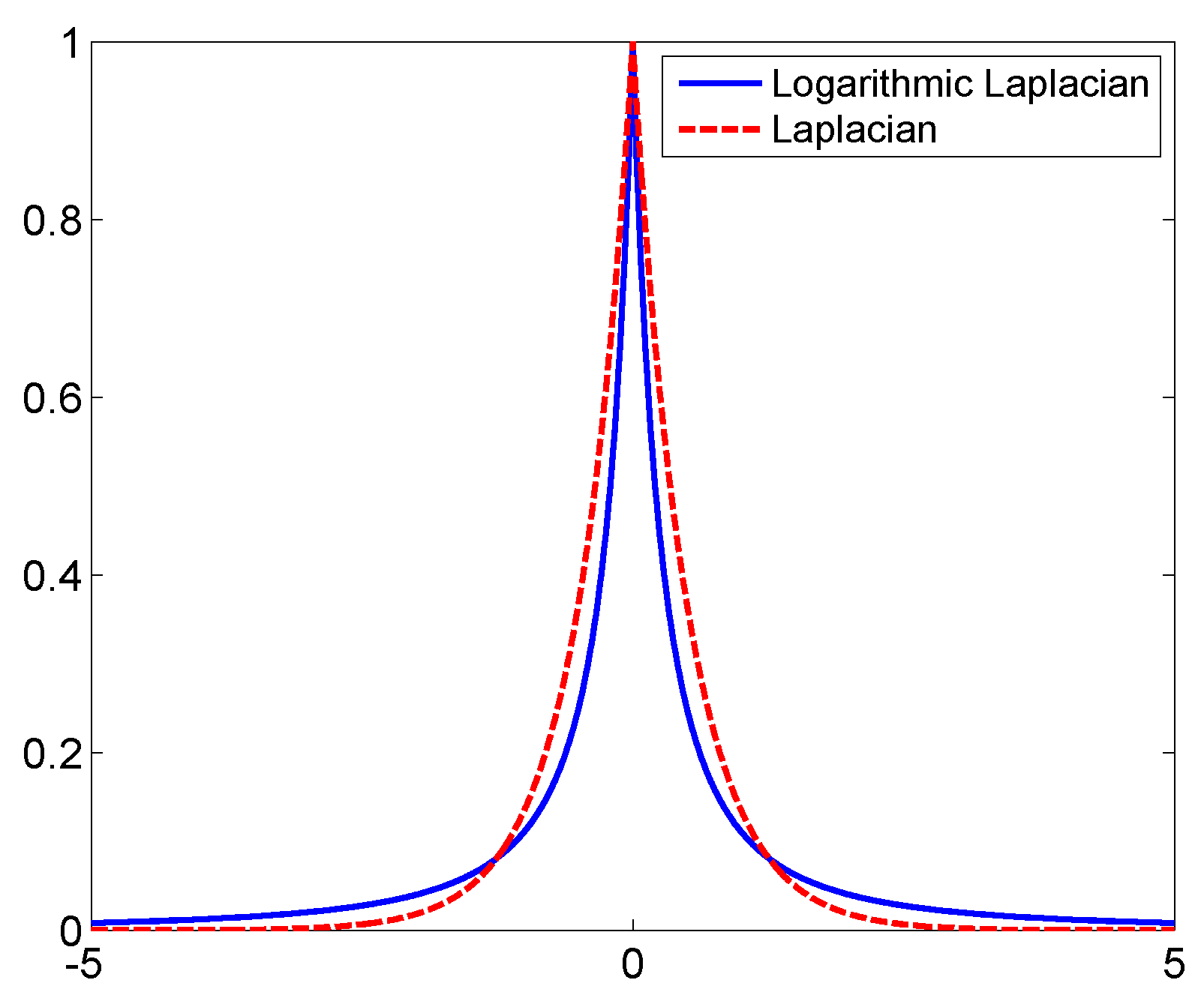
2. Logarithmic Laplacian Prior
3. Signal Model with the Logarithmic Laplacian Prior
4. Bayesian ISAR Imaging
4.1. Sparse Reconstruction of ISAR Image
4.2. Model Parameters Learning
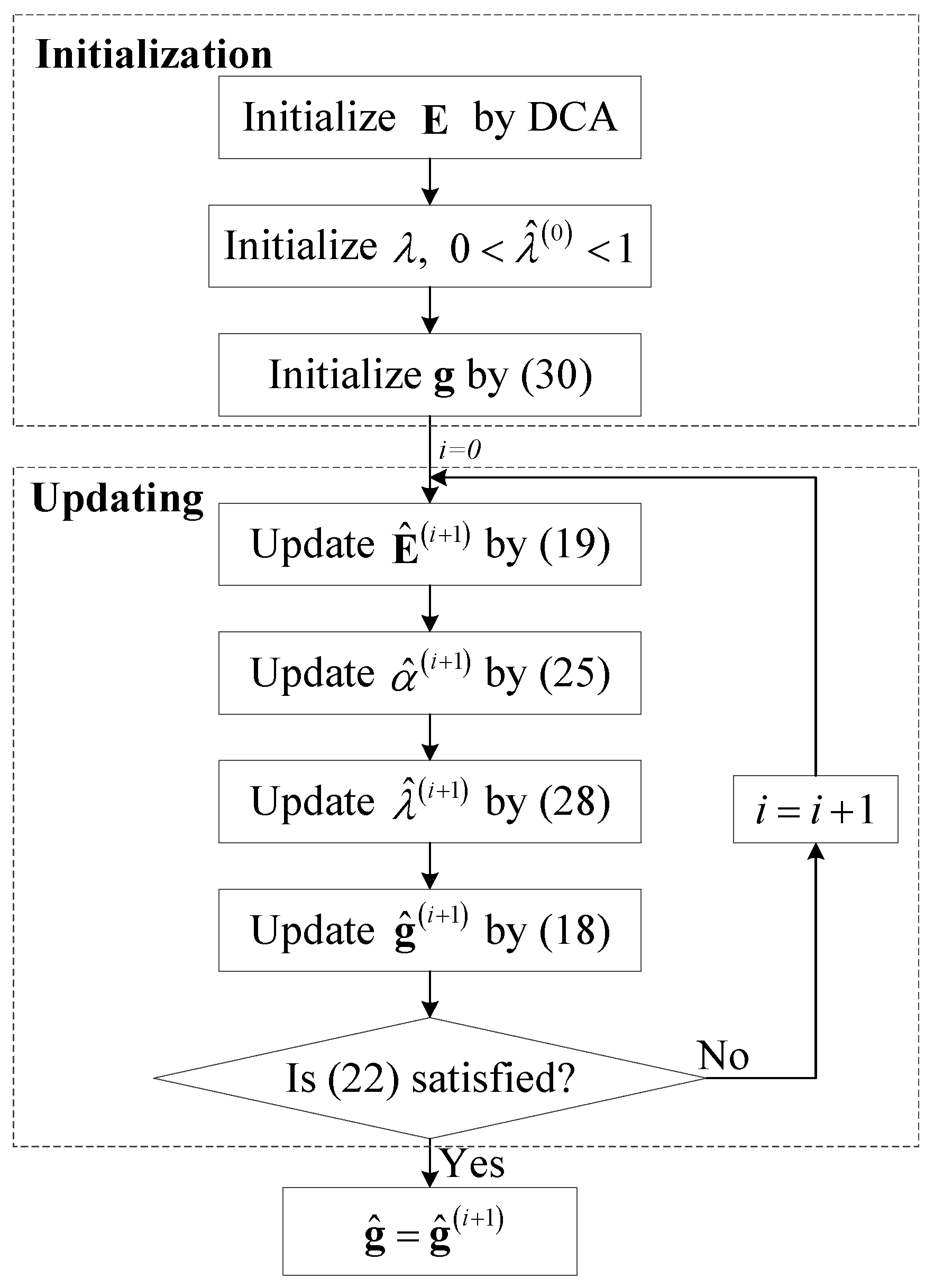
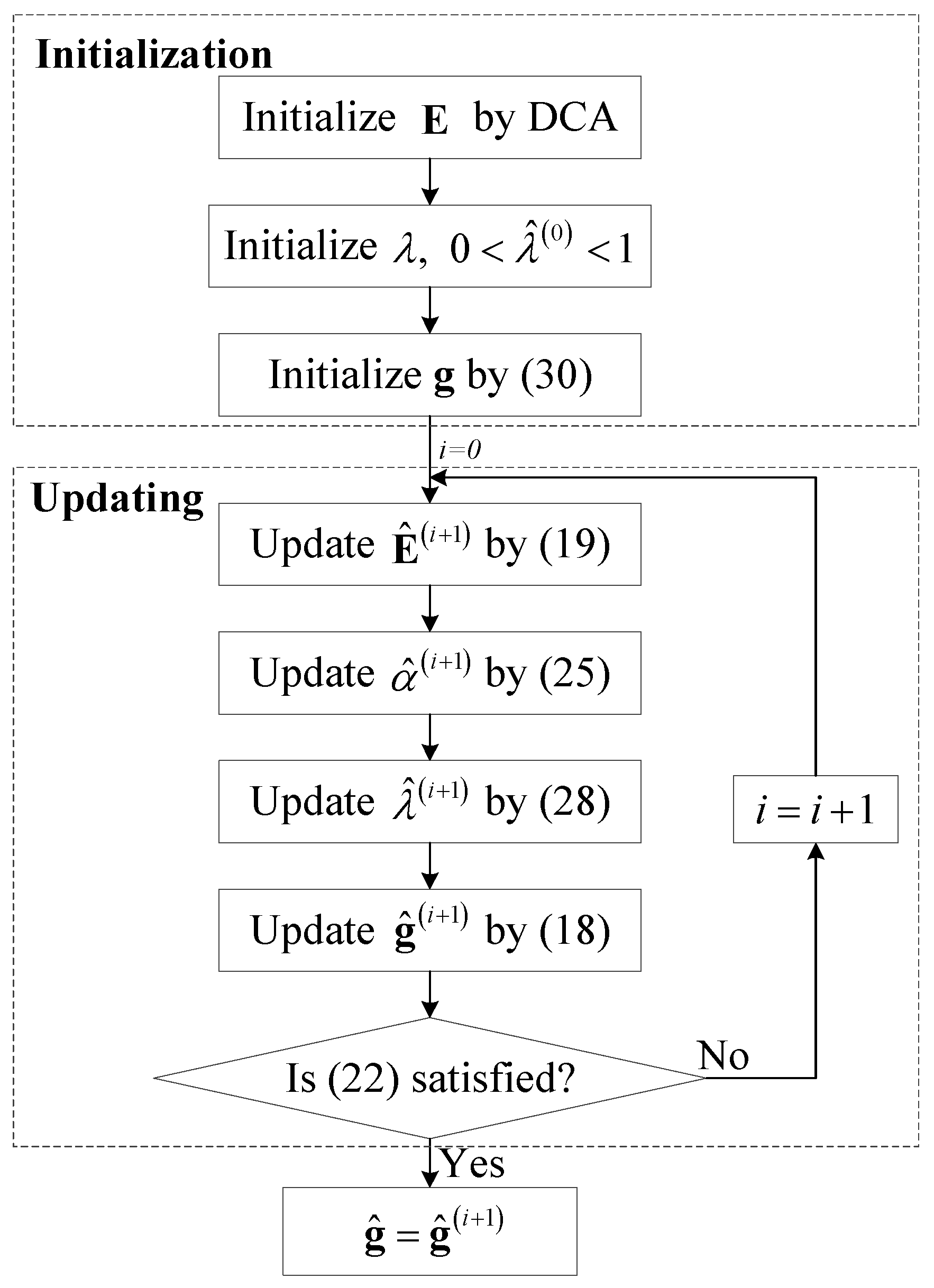
4.3. Initialization
5. Experimental Results
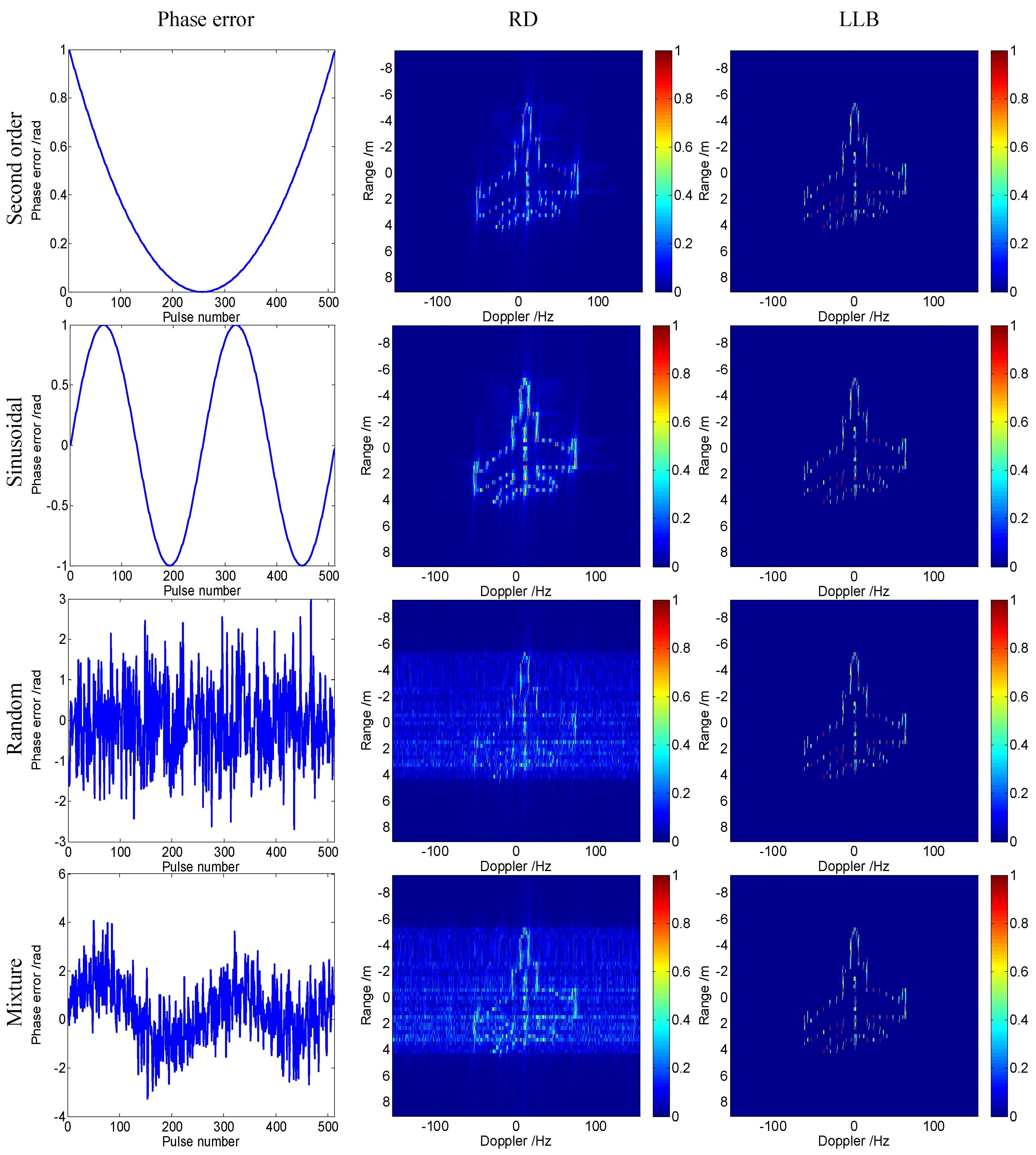
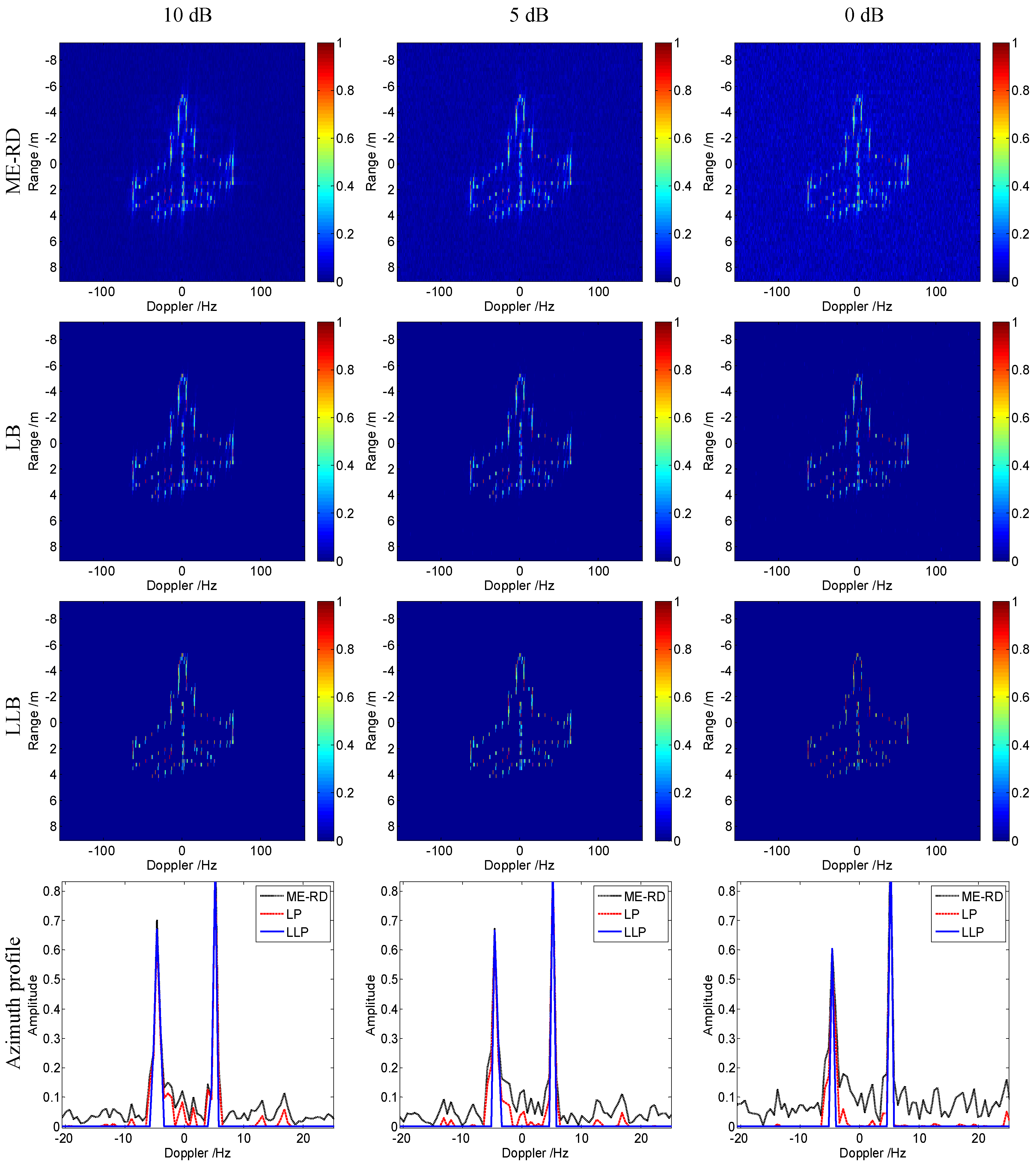
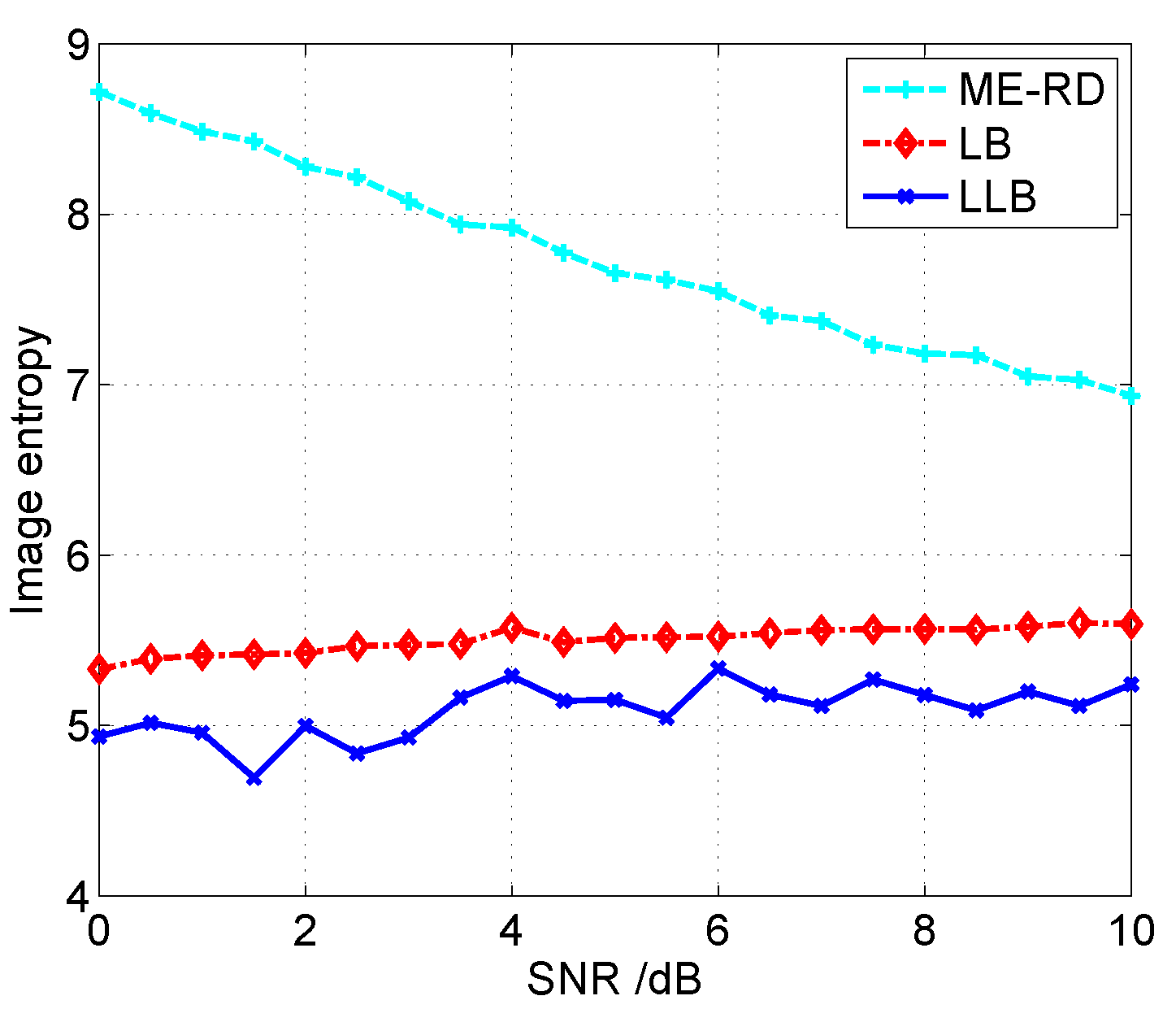
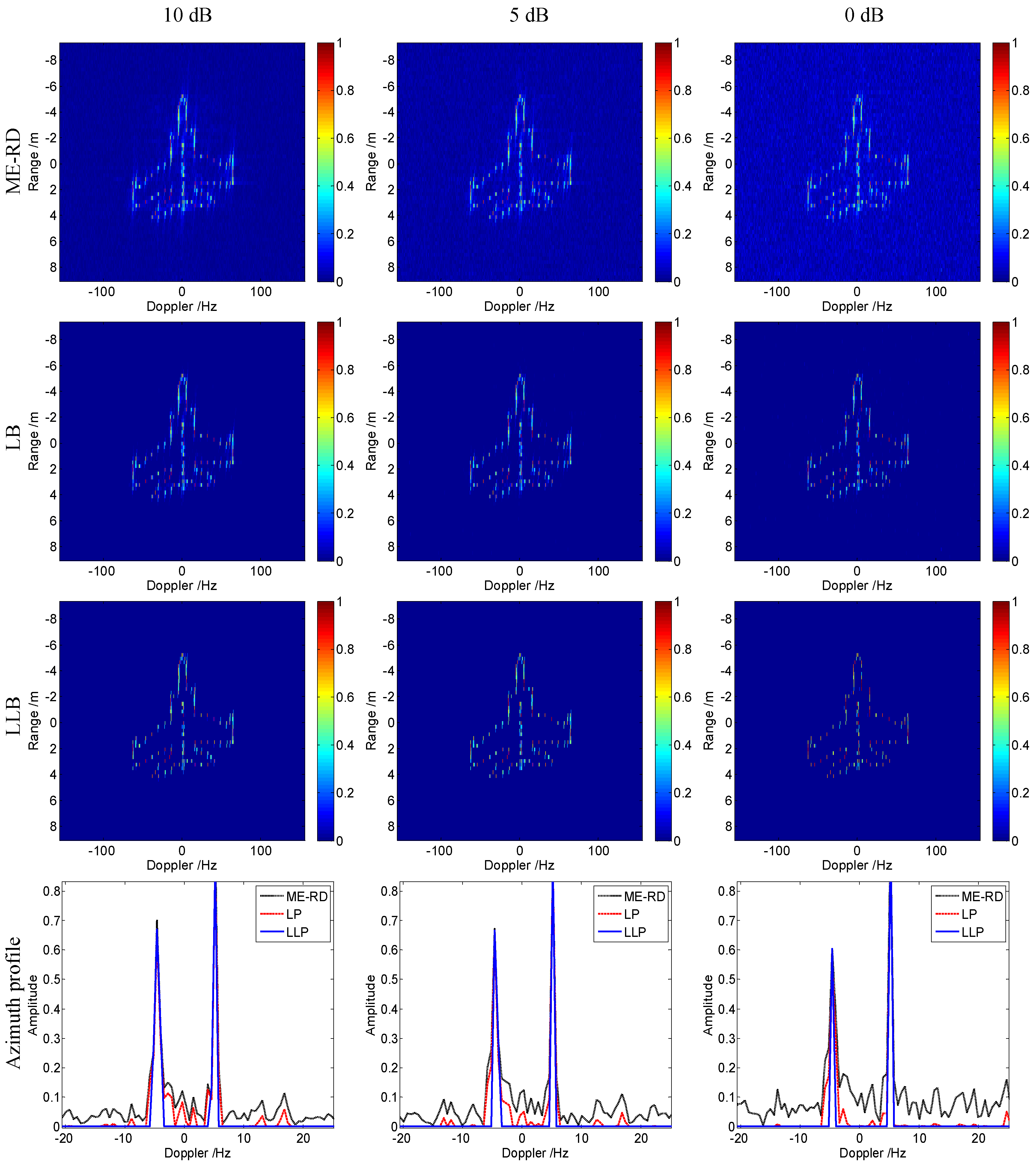
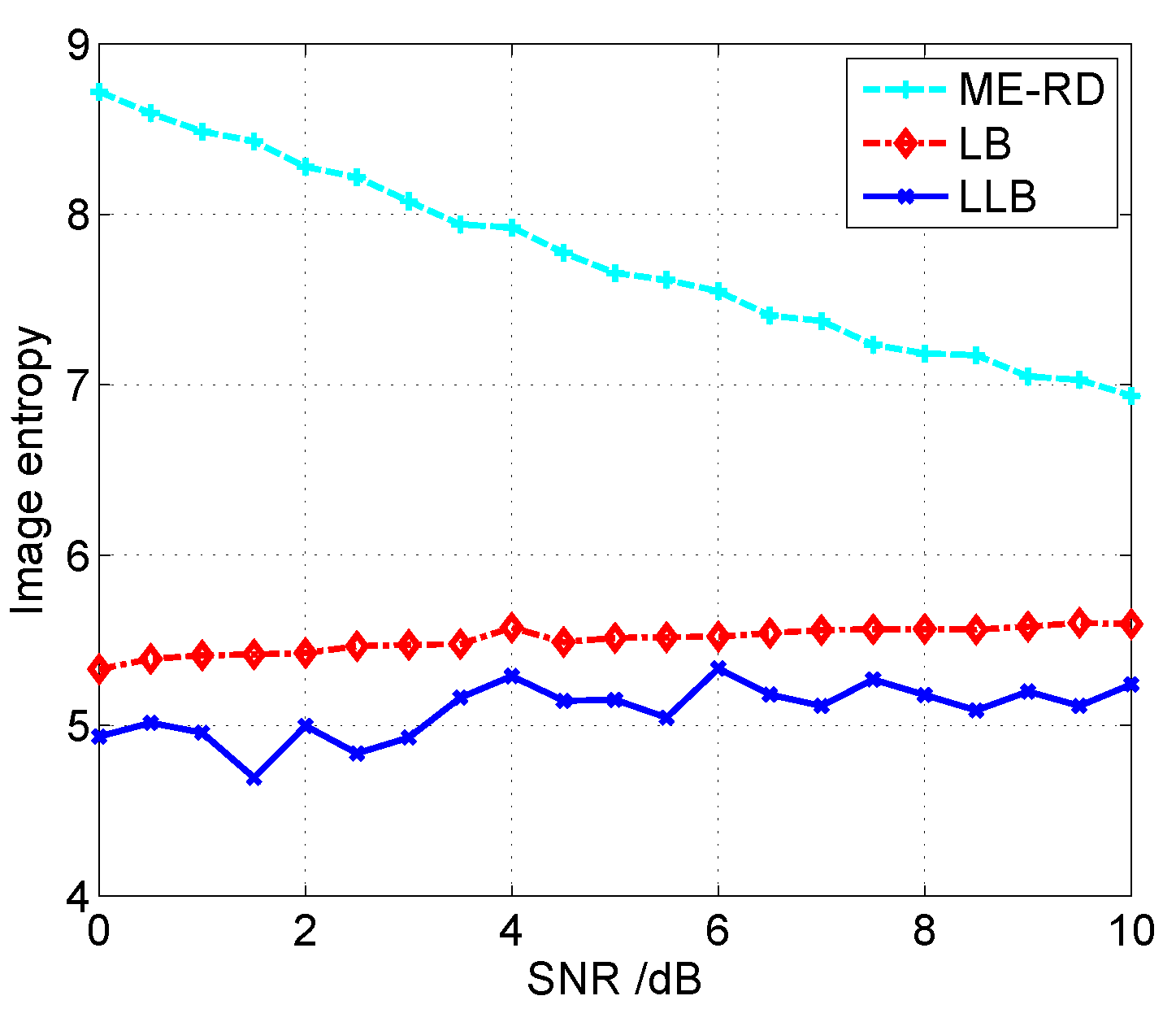
5.1. Data Set 1: Simulated Data of Mig-25
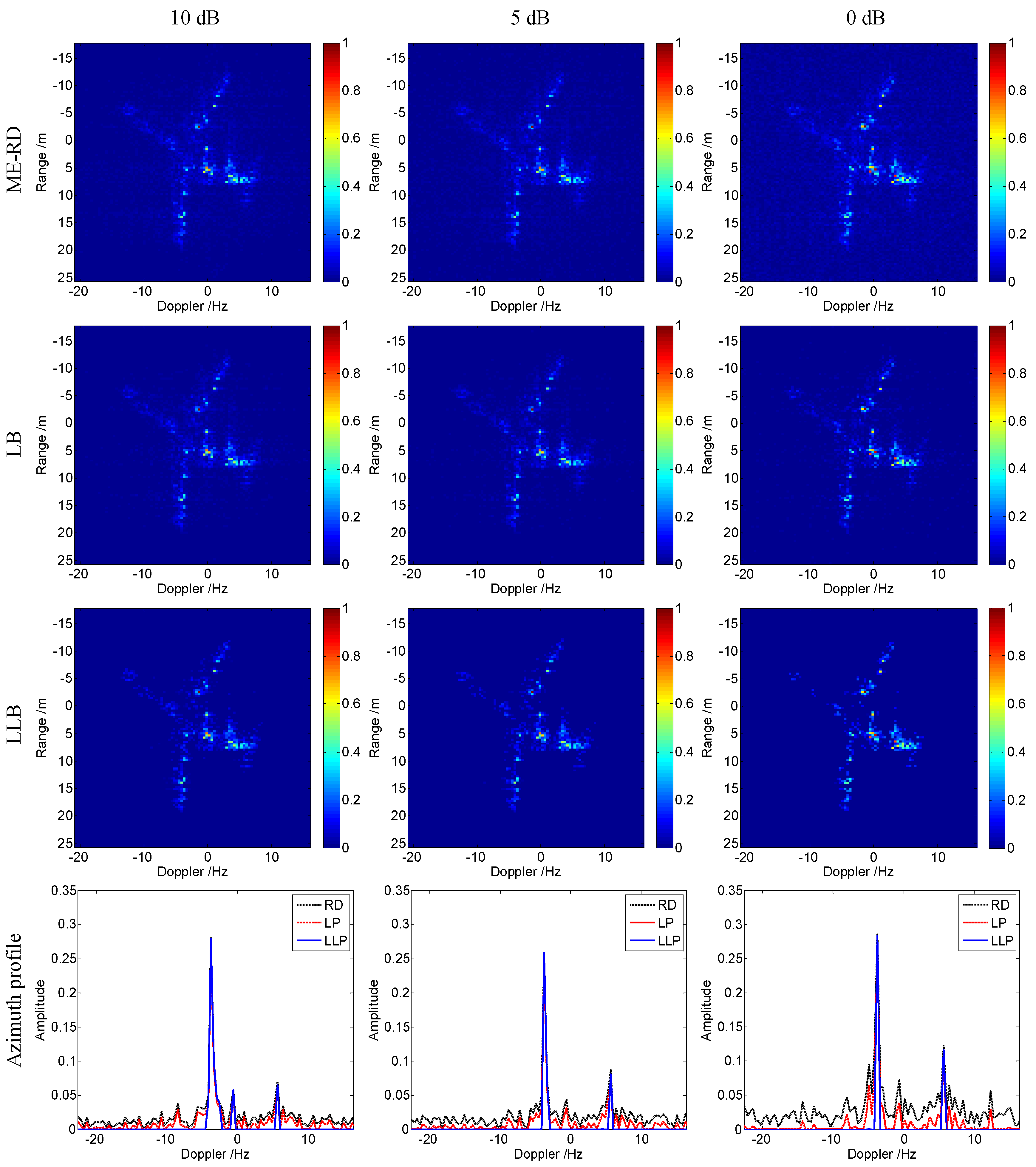
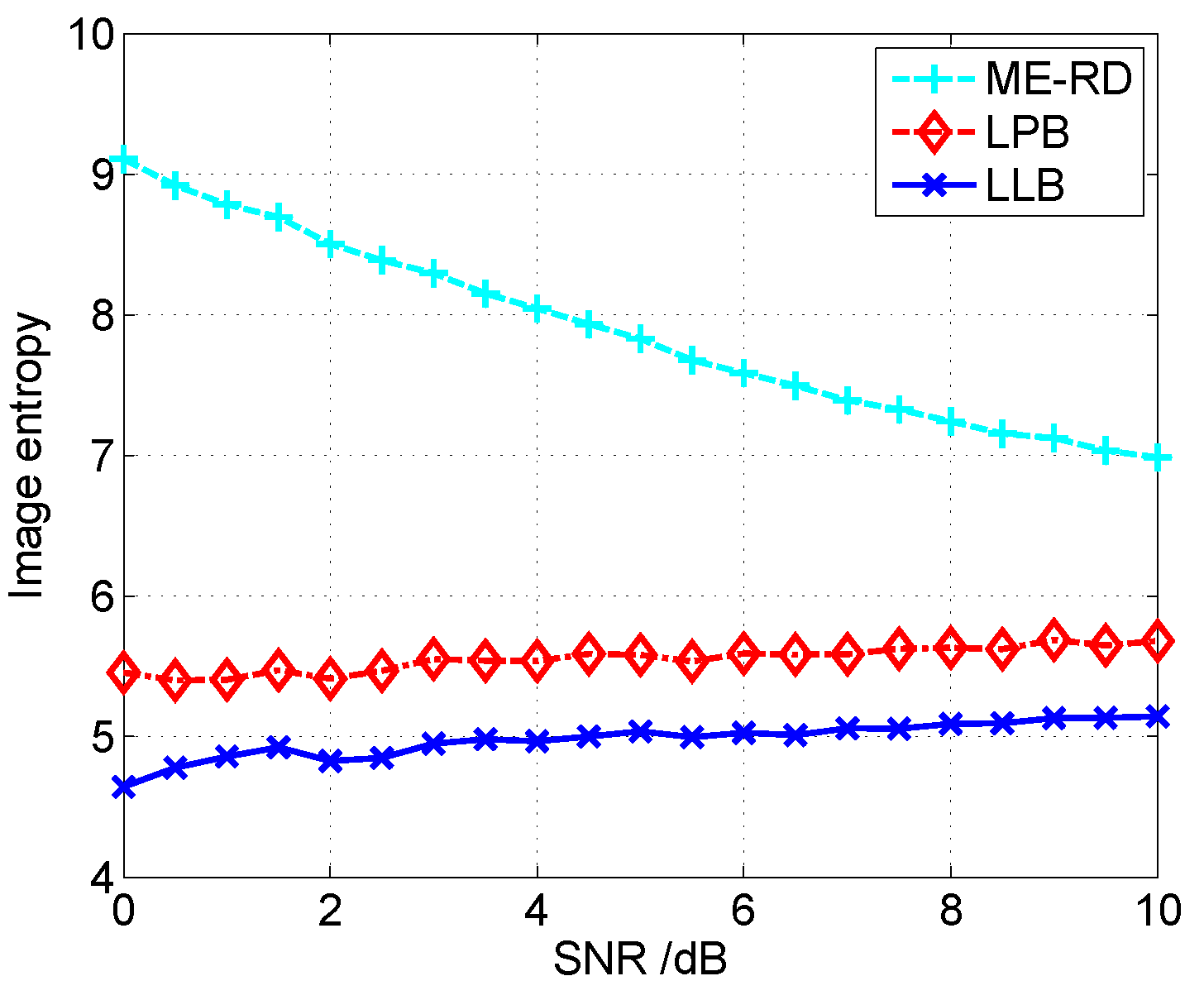
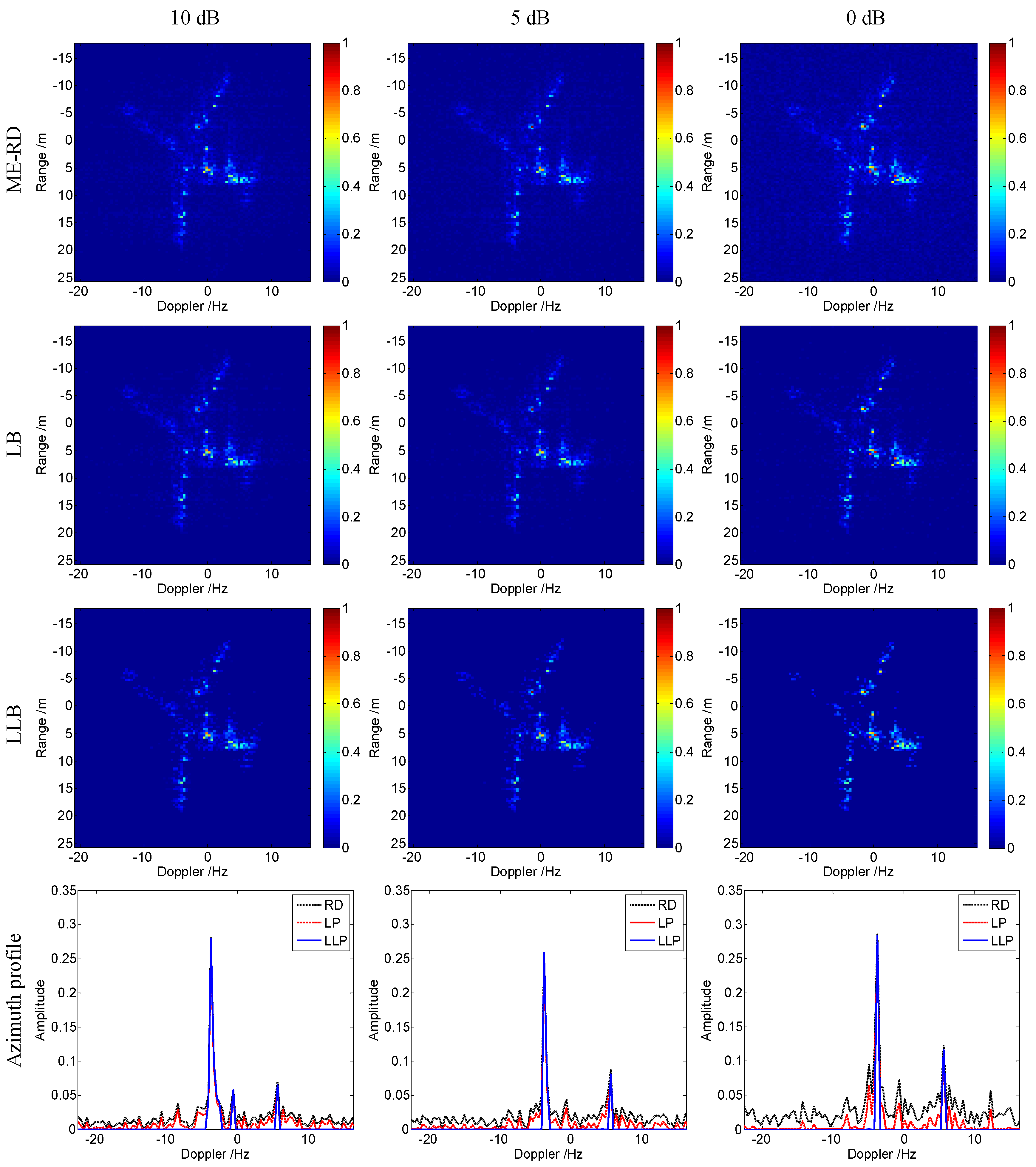
5.2. Data Set 2: Real Measured Data of Yak-42
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chen, C.C.; Andrews, H.C. Target-motion-induced radar imaging. IEEE Trans. Aerosp. Electron. Syst. 1980, 1, 2–14. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, S.; Zhu, D.; Li, X. A Novel Speed Compensation Method for ISAR Imaging with Low SNR. Sensors 2015, 15, 18402–18415. [Google Scholar] [CrossRef] [PubMed]
- Xu, G.; Xing, M.; Zhang, L.; Duan, J.; Chen, Q.; Bao, Z. Sparse Apertures ISAR Imaging and Scaling for Maneuvering Targets. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 2942–2956. [Google Scholar] [CrossRef]
- Walker, J.L. Range-Doppler imaging of rotating objects. IEEE Trans. Aerosp. Electron. Syst. 1980, 1, 23–52. [Google Scholar] [CrossRef]
- Qadir, S.G.; Fan, Y. Two-Dimensional Superresolution Inverse Synthetic Aperture Radar Imaging Using Hybridized SVSV Algorithm. IEEE Trans. Antennas Propag. 2013, 61, 1012–1015. [Google Scholar] [CrossRef]
- Zhang, S.; Liu, Y.; Li, X. Pseudomatched-Filter-Based ISAR Imaging Under Low SNR Condition. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1240–1244. [Google Scholar] [CrossRef]
- Zhang, L.; Qiao, Z.; Xing, M.; Sheng, J.; Guo, R.; Bao, Z. High-Resolution ISAR Imaging by Exploiting Sparse Apertures. IEEE Trans. Antennas Propag. 2012, 60, 997–1008. [Google Scholar] [CrossRef]
- Zhang, L.; Xing, M.; Qiu, C.; Li, J.; Sheng, J.; Li, Y.; Bao, Z. Resolution enhancement for inversed synthetic aperture radar imaging under low SNR via improved compressive sensing. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3824–3838. [Google Scholar] [CrossRef]
- Li, G.; Zhang, H.; Wang, X.; Xia, X. ISAR 2D imaging of uniformly rotating targets via matching pursuit. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 1838–1846. [Google Scholar] [CrossRef]
- Wang, H.; Quan, Y.; Xing, M.; Zhang, S. ISAR imaging via sparse probing frequencies. IEEE Geosci. Remote Sens. Lett. 2011, 8, 451–455. [Google Scholar] [CrossRef]
- Chen, S.S.; Donoho, D.L.; Saunders, M.A. Atomic decomposition by basis pursuit. SIAM Rev. 2001, 43, 129–159. [Google Scholar] [CrossRef]
- Gorodnitsky, I.F.; Rao, B.D. Sparse signal reconstruction from limited data using FOCUSS: A re-weighted minimum norm algorithm. IEEE Trans. Sign. Process. 1997, 45, 600–616. [Google Scholar] [CrossRef]
- Tropp, J.A. Greed is good: Algorithmic results for sparse approximation. IEEE Trans. Inf. Theory 2004, 50, 2231–2242. [Google Scholar] [CrossRef]
- Tipping, M.E. Sparse Bayesian Learning and the Relevance Vector Machine. J. Mach. Learn. Res. 2001, 1, 211–244. [Google Scholar]
- Wipf, D.P.; Rao, B.D. Sparse Bayesian learning for basis selection. IEEE Trans. Sign. Process. 2004, 52, 2153–2164. [Google Scholar] [CrossRef]
- Xu, G.; Xing, M.; Zhang, L.; Liu, Y.; Li, Y. Bayesian inverse synthetic aperture radar imaging. IEEE Geosci. Remote Sens. Lett. 2011, 8, 1150–1154. [Google Scholar] [CrossRef]
- Liu, H.; Jiu, B.; Liu, H.; Bao, Z. Superresolution ISAR Imaging Based on Sparse Bayesian Learning. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5005–5013. [Google Scholar]
- Liu, H.; Jiu, B.; Liu, H.; Bao, Z. A Novel ISAR Imaging Algorithm for Micromotion Targets Based on Multiple Sparse Bayesian Learning. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1772–1776. [Google Scholar]
- Zhao, L.; Wang, L.; Bi, G.; Yang, L. An Autofocus Technique for High-Resolution Inverse Synthetic Aperture Radar Imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6392–6403. [Google Scholar] [CrossRef]
- Xu, G.; Xing, M.; Xia, X.; Chen, Q.; Zhang, L.; Bao, Z. High-Resolution Inverse Synthetic Aperture Radar Imaging and Scaling with Sparse Aperture. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 4010–4027. [Google Scholar] [CrossRef]
- Tzikas, D.G.; likas, A.C.; Galatsanos, N.P. The Variational Approximation for Bayesian inference. IEEE Sign. Process. Mag. 2008, 25, 131–146. [Google Scholar] [CrossRef]
- Babacan, S.D.; Molina, R.; Katsaggelos, A.K. Bayesian Compressive Sensing Using Laplace Priors. IEEE Trans. Image Process. 2010, 19, 53–63. [Google Scholar] [CrossRef] [PubMed]
- Zhu, D.; Wang, L.; Yu, Y.; Tao, Q.; Zhu, Z. Robust ISAR range alignment via minimizing the entropy of the average range profile. IEEE Geosci. Remote Sens. Lett. 2009, 6, 204–208. [Google Scholar]
- Zhang, S.; Liu, Y.; Li, X. Fast entropy minimization based autofocusing technique for ISAR imaging. IEEE Trans. Sign. Process. 2015, 63, 3425–3434. [Google Scholar] [CrossRef]
- Wang, J.; Liu, X.; Zhou, Z. Minimum-entropy phase adjustment for ISAR. IEE Proc. -Radar Sonar Navig. 2004, 151, 203–209. [Google Scholar] [CrossRef]
- Çetin, M.; William, C.K. Feature-Enhanced Synthetic Aperture Radar Image Formation Based on Nonquadratic Regularization. IEEE Image Process. 2001, 10, 623–631. [Google Scholar] [CrossRef] [PubMed]
- Itoh, T.; Sueda, H.; Watanabe, Y. Motion compensation for ISAR via centroid tracking. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 1191–1197. [Google Scholar] [CrossRef]
- Jiang, Z.; Xing, M.; Bao, Z. Correction of migration through resolution cell in ISAR imaging. Electron. Inf. Technol. 2002, 23, 577–583. [Google Scholar]
- Hu, J.; Zhou, W.; Fu, Y.; Li, X.; Jing, N. Uniform Rotational Motion Compensation for ISAR Based on Phase Cancellation. IEEE Geosci. Remote Sens. Lett. 2014, 8, 636–640. [Google Scholar] [CrossRef]
- Jiu, B.; Liu, H.; Liu, H.; Zhang, L.; Cong, Y.; Bao, Z. Joint ISAR Imaging and Cross-Range Scaling Method Based on Compressive Sensing With Adaptive Dictionary. IEEE Trans. Antennas Propag. 2015, 63, 2112–2121. [Google Scholar] [CrossRef]

© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, S.; Liu, Y.; Li, X.; Bi, G. Logarithmic Laplacian Prior Based Bayesian Inverse Synthetic Aperture Radar Imaging. Sensors 2016, 16, 611. https://doi.org/10.3390/s16050611
Zhang S, Liu Y, Li X, Bi G. Logarithmic Laplacian Prior Based Bayesian Inverse Synthetic Aperture Radar Imaging. Sensors. 2016; 16(5):611. https://doi.org/10.3390/s16050611
Chicago/Turabian StyleZhang, Shuanghui, Yongxiang Liu, Xiang Li, and Guoan Bi. 2016. "Logarithmic Laplacian Prior Based Bayesian Inverse Synthetic Aperture Radar Imaging" Sensors 16, no. 5: 611. https://doi.org/10.3390/s16050611