1. Introduction
Compared with traditional electronic vibration sensors, fiber Bragg grating (FBG) sensing offers many advantages, for instance, immunity from electromagnetic interference and high temperatures, small size, corrosion resistance and ability to multiplex, so accelerometer design methods based on FBG are particularly attractive. Many scholars have done an in-depth research on them. Berkoff
et al. proposed a new accelerometer, where the mass rested on a compliant material supported by a rigid base plate, and FBG embedded in the compliant material, using the mass’s movement conversion of the axial strain of the FBG by the compliant material [
1]. Au
et al. presented a tapered plate FBG accelerometer, where the FBGs have been pasted on the surface of the tapered plate; the experiment shows that its sensitivity is 18.93 με/g, and the maximum input signal frequency is up to 150 Hz [
2]. A flexural beam utilized as primary transduction mechanism for demonstrating a FBG accelerometer has been described in [
3]; it has good acceleration sensitivity of 212.5 με/g, and the resonant frequency is on the order of 1 kHz. Basumallick
et al. proposed a method to improve the sensitivity of cantilever-mass-based FBG accelerometers by altering the distance between the axis of the FBG sensor to the neutral axis of the cantilever [
4], and it’s demonstrated that its sensitivity is about 1062 pm/g. All of the above FBG vibration sensors’ principles are based on pasted FBGs, so these sensors’ sensing properties are limited by the pasting process and the elastomer structure.
Antunes
et al. described the implementation and testing of an optical fiber-based accelerometer with cross axis insensitivity; its principle is based on an improved cantilever beam, and vertical vibration is converted into tension and compression movement along the FBGs’ axial direction by dangly arranged FBGs [
5]. A
L-shaped modified cantilever beam FBG-based accelerometer with self-temperature compensation has been studied in [
6]; its sensitivity is 46 pm/g for frequencies below 50 Hz and 306 pm/g for frequencies above 150 Hz. da Costa Antunes
et al. designed an accelerometer, where the inertial mass, supported by a
L-shaped aluminum cantilever beam, was connected to the structure base by a steel leaf spring; when exposed to an external acceleration, the inertial mass’s movement along the vertical direction was converted into a contraction/expansion of the optical fiber through the
L-shaped beam; it can be used to monitor structures with frequencies up to 45 Hz [
7]. Reference [
8] described the implementation and testing of an optical fiber biaxial accelerometer based on four FBGs placed in opposite positions; this is a simple solution to measure acceleration in two orthogonal directions, and its sensitivities were 87.848 and 92.351 pm/g, for each sensitive direction with resonant frequencies of 846.01 and 845.33 Hz, respectively. A fiber Bragg grating single-axis acceleration sensor based on a double-membrane has been proposed in [
9]; its cross coupling of non-directional accelerations is minimized by introducing a unique double-membrane fixture of the sensor's mass of inertia leading to an almost diagonal form of the sensors stiffness-matrix; according to FEM simulation of the sensor, its resonance frequency is 6.0 kHz with a sensitivity of 1 pm/g. The references [
10,
11] proposed a non-contact vibration sensor based on fiber Bragg gratings, mainly used to measure displacement vibrations; the diaphragm is used as the elastomer, and its principle is similar to that described in [
9]. Zhang
et al. presented a novel FBG accelerometer, where the elastomer is the fiber itself, and the mass is fixed on the middle of the two FBGs to sense the vibration; it has good flat response from 10–130 Hz with a sensitivity of 231.8 pm/g [
12]. A metal bellows-based FBG accelerometer is proposed and experimentally demonstrated in [
13], the mass is also directly fixed on the fiber, the principle of the it is similar to the sensor in reference [
12]; its sensitivity is 548.7 pm/g within a wide frequency response range 5–110 Hz. Guo
et al. presented a fiber Bragg grating-based accelerometer with a fully metalized package, the elastic coefficient of fiber is greatly improved by this processing, the experiments shows that its resonant frequency is 3.6 kHz, and the sensitivity is 1.7 pm/g within the range of 0–8 g [
14]. Based on the above investigation, the sensitivity of previous FBG accelerometers is commonly relatively lower. And all of these aren’t suited to measure micro-vibrations. Li
et al. used the transverse property of optical fiber to design a triaxial vibration sensor; its sensitivity in the y direction is 971.8 pm/g, which is larger than the above designed FBG vibration sensors [
15], but in [
15], only experiments were used to verify the triaxial vibration measurement theoretical model, and it lacks a rigorous sensitivity theoretical model, so this paper mainly proposes a FBG-based vibration sensor to monitor micro-vibrations and builds an effective model for the sensitivity, which meets the micro-vibration requirements.
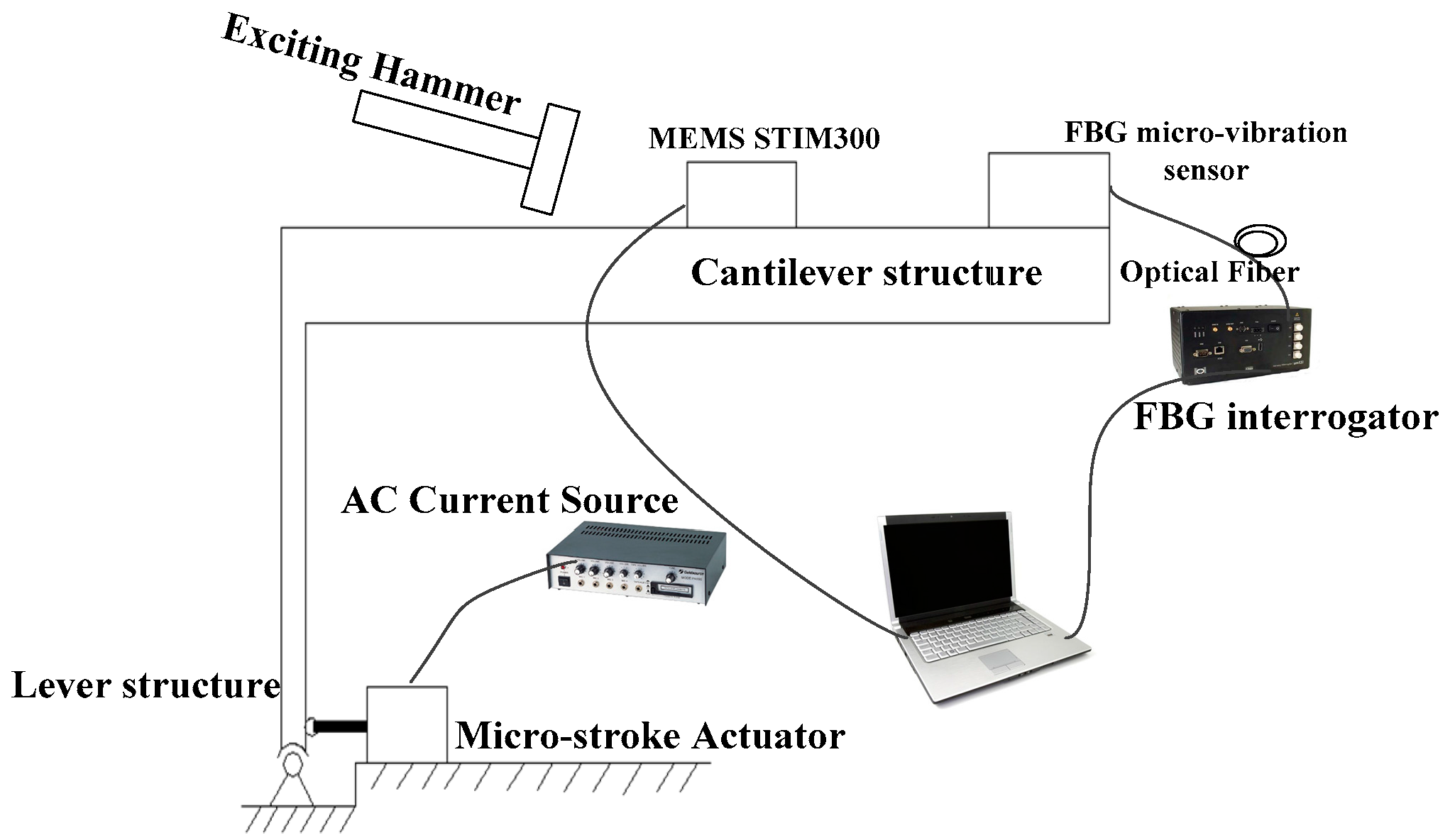
In this paper, a micro-vibration sensor based on FBG sensing has been proposed. The optical fiber has been directly treated as an elastomer, which possesses two FBGs, and the vertical vibration of the mass has been converted into the axial tension/compression of FBG to achieve the micro-vibration measurement. The principle of the sensor and experimental analyses are introduced.
2. Model and Principle of Micro-Vibration Sensor
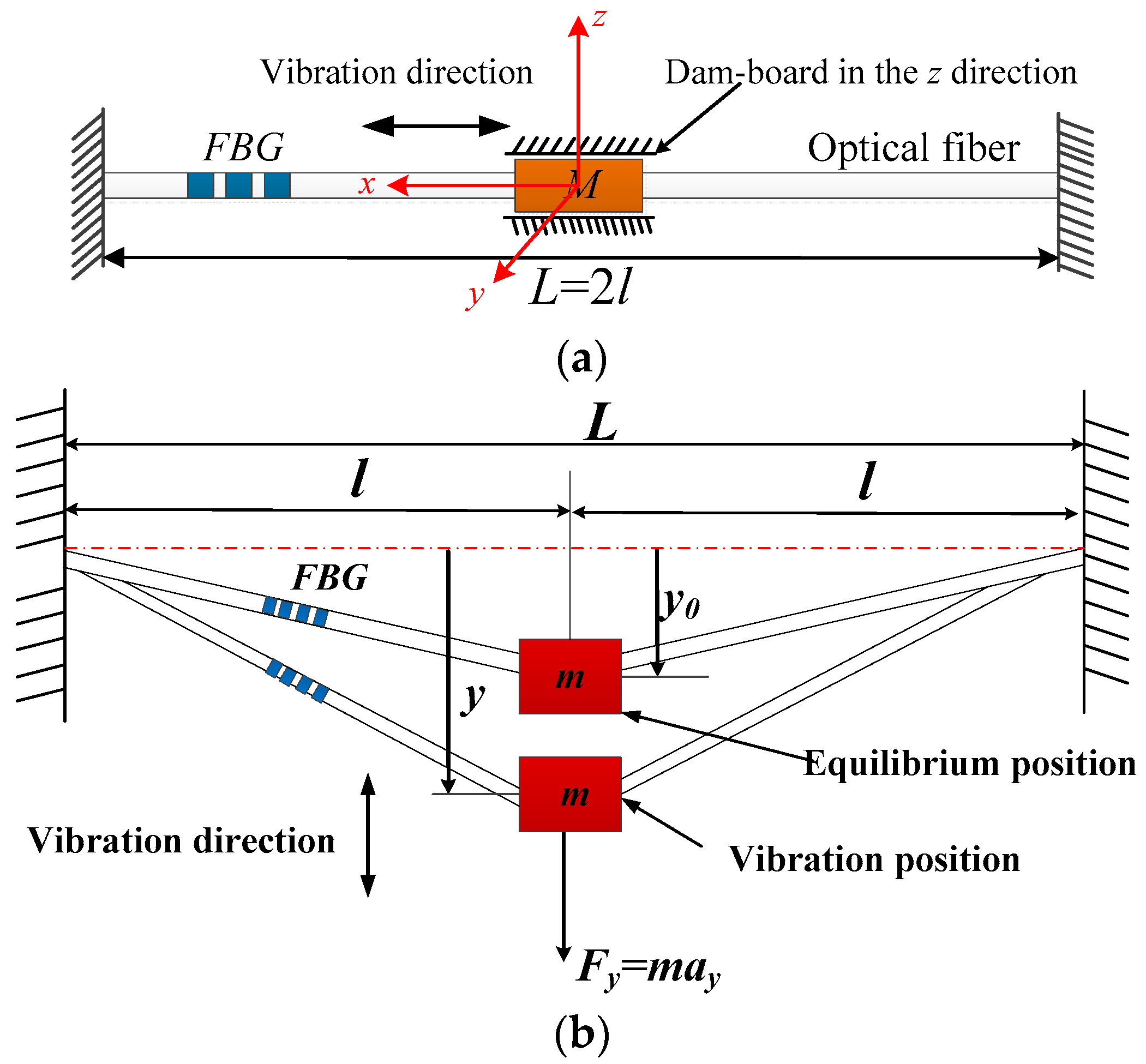
Commonly designed FBG vibration sensors mainly use the mechanical structure as elastomer, such as the cantilevers in [
6,
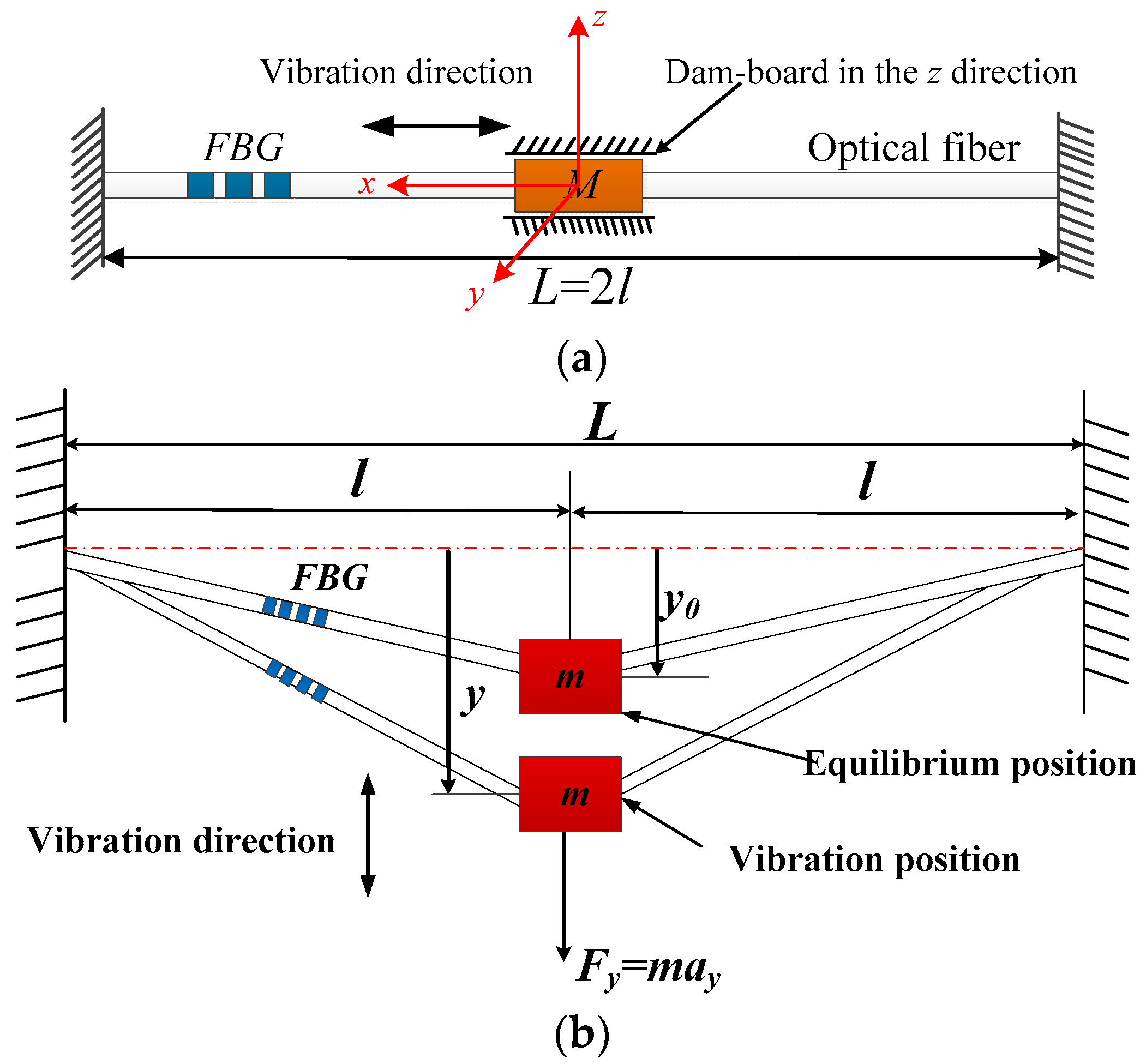
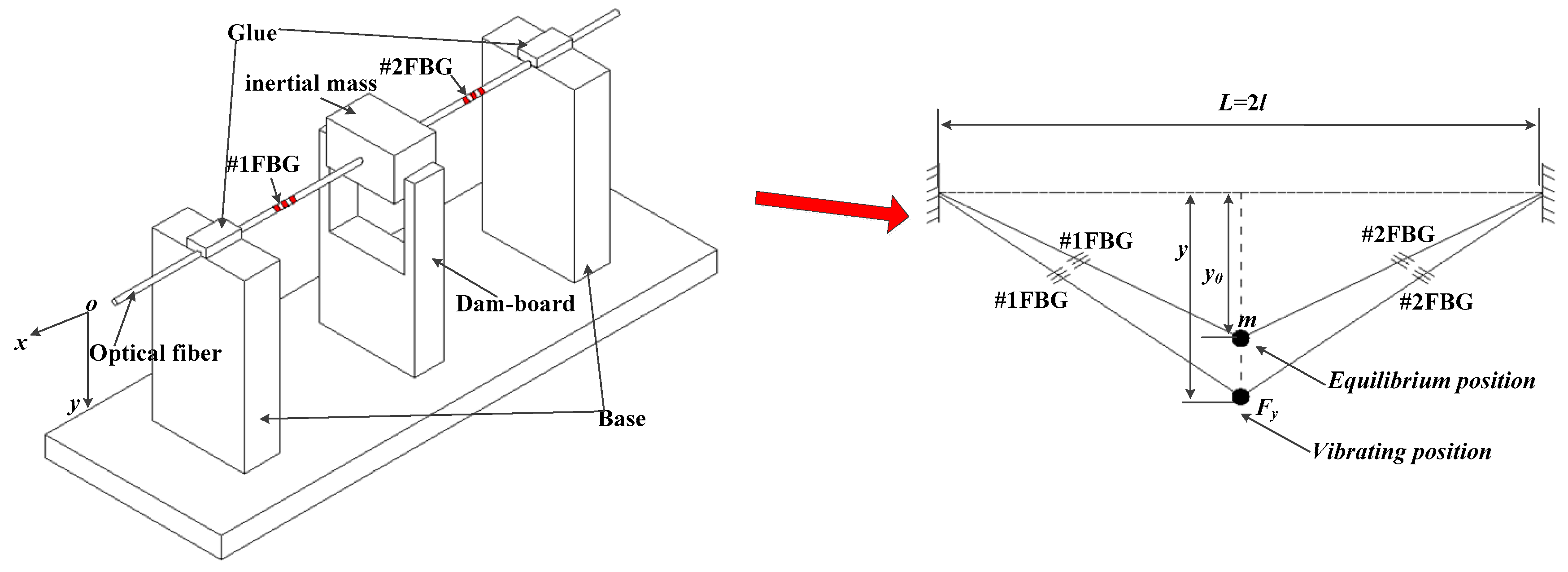
7]. This paper directly uses the optical fiber as elastomer to design the vibration sensor (
Figure 1), the
z direction freedom of mass is limited by the dam-board. Its structure is very small and simple; also it’s easily to achieve quasi-distributed vibration measurements. According to the mechanics of the material, the horizontal direction stiffness
Kx of sensor can be expressed as:
where
Ef is the Young’s Modulus of optical fiber, and
Af means the cross-sectional area of the optic fiber. According to the material mechanics, the lateral bending stiffness of the fiber can be described as
KL =
EfIf = π
EfD4/64. Young’s Modulus
Ef and diameter of optical fiber D are 72 GPa and 125 μm, respectively.
The lateral bending stiffness of fiber
KL is equal to 8.63 × 10
−5 N/m, which is close to 0, so the optical fiber can be considered as a string. Its lateral vibration model can be simplified as shown in
Figure 1b. Combining with geometrical deformation method, the strain increment of the fiber are separately Δ
ε0 and Δ
εy under mass in the equilibrium position or vibrating position, which can be expressed by:
where
y0 represents the distance between the equilibrium position of the mass and a horizontal line,
y is the vertical direction movement of inertial mass,
L(
L = 2
l) is the initial length of the optical fiber between both fixed ends,
ay is the acceleration along the
y direction.
Pre-stress is exerted on the optical fiber during the sensor packaging process; the corresponding pre-strain of the fiber is
ε0. Combining the equation of static theory with Equation (1), when the mass is in the equilibrium position, the gravity of mass
mg can be represented by:
where Δ
ε0 is the strain increment under the inertial mass gravity,
g represents acceleration of gravity.
Combining with Equation (4), the stiffness of optical fiber
Ky along the vibration direction can be written as:
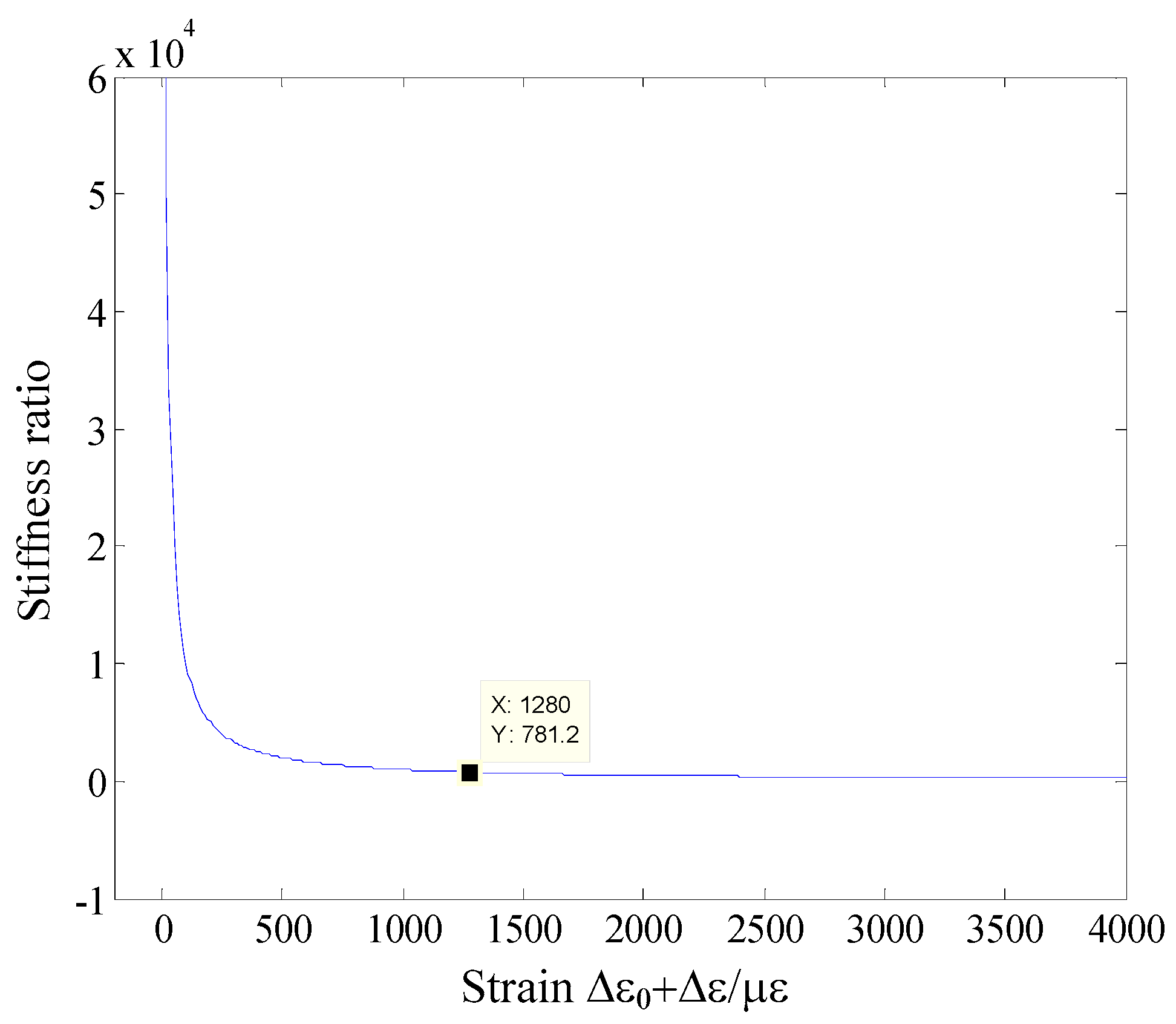
Combining Equation (1) with Equation (5), the
Rx/y is the stiffness ratio between the horizontal and vibration direction stiffness, and it can be described by:
From Equation (6), the stiffness ratio
versus Δ
ε0 +
ε0 is shown in
Figure 2. From
Figure 2, the
Rx/y is far more than 1, which means the
Kx >>
Ky. The sensitivity of the vibration sensor is inversely proportional to the stiffness. The FBG vibration sensor was designed using the axial feature of optical fiber in [
13], and the mass is 17.9 g, while the sensor’s sensitivity is only 231.48 pm/g. When the vertical direction of optical fiber is considered as the vibration direction, it will greatly improve the sensitivity of the FBG vibration sensor to use the same mass as reference [
13]. Therefore, the vertical vibration property can be used to design a micro-vibration sensor.
Combining Equation (4) with the definition of resonant frequency, the resonant frequency
wv of vibration direction can be written as:
When the excited vibration frequency
w <<
wv, through the vibration mechanics, the relationship between
y −
y0 and acceleration
ay can be expressed as:
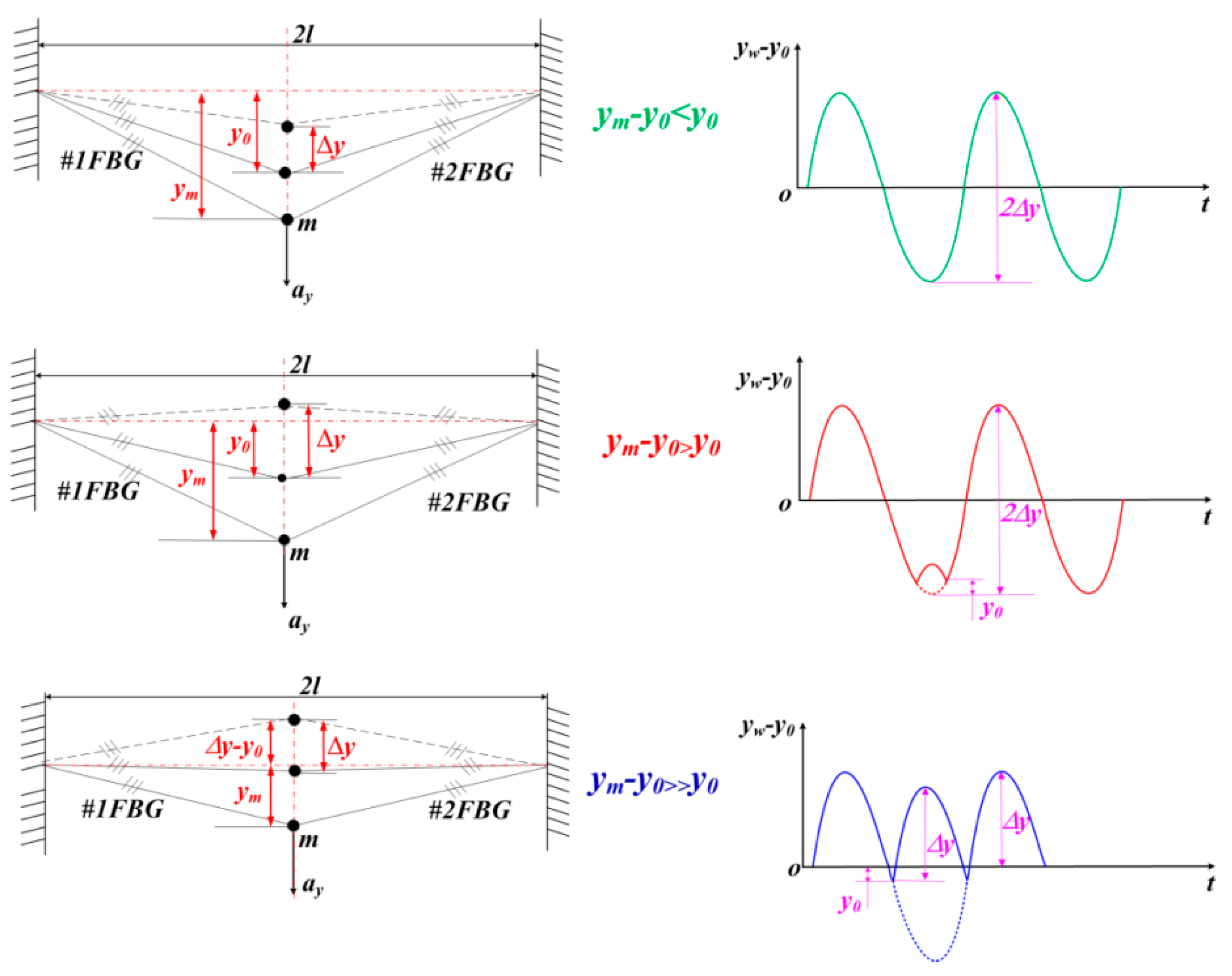
The response wave pattern for the vertical vibration model of optical fiber is shown in
Figure 3. In order to get a perfect vibration wave, it should satisfy the situation
ym −
y0 <
y0 (where
ym represents the maximum vibration deformation in the vertical direction) from
Figure 3. When the vibration is very small, the relation between
y0 and Δ
ε0 can be simplified as linearity. Therefore, only if the maximum strain of FBG is less than Δ
ε0 could the sensor accurately obtain the vibration signal. From this conclusion, we can effectively obtain the sensing ranges of the micro-vibration sensor.
Combining the Equation (2) with Equation (3), Equation (8) can be simplified as:
From Equation (9), the acceleration
ay can be expressed as:
According to the Taylor formula, Equation (10) can be expanded at the Δ
εy = 0. Due to the fact Δ
εy is very small, we extract the first order Taylor expansion. The acceleration
ay can be rewritten as:
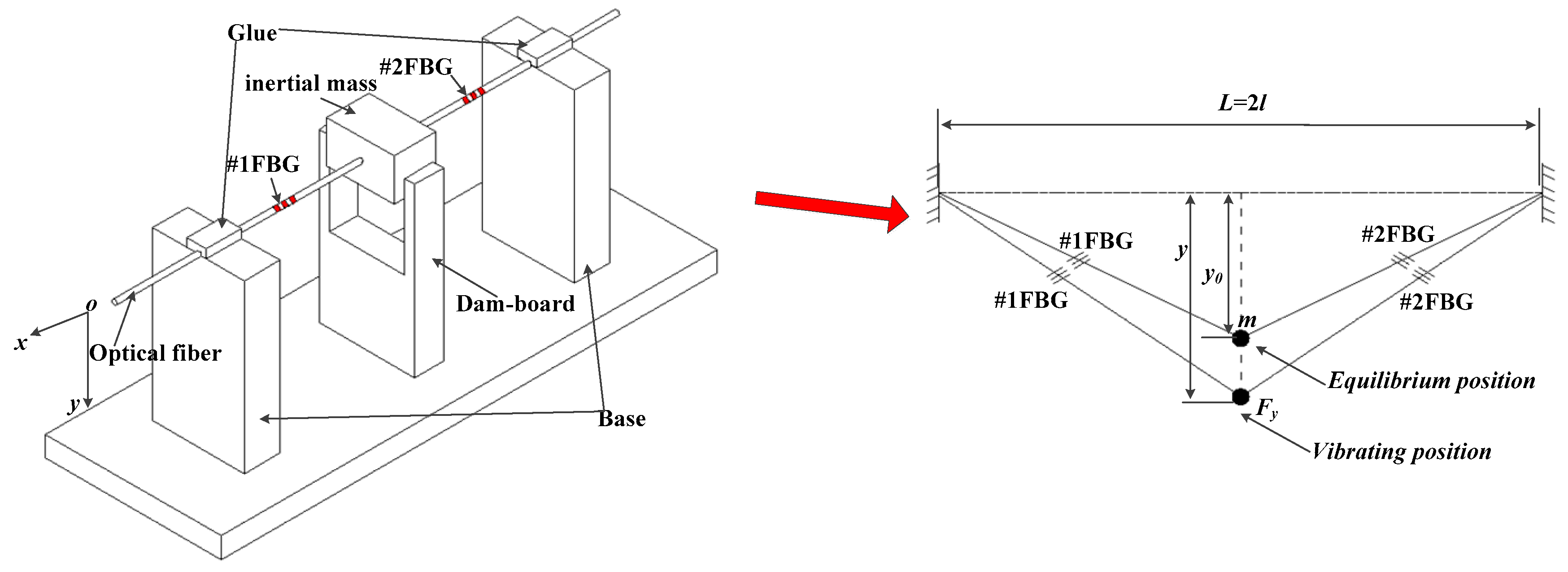
A schematic diagram of the FBG-based micro-vibration sensor is shown in
Figure 4. The optical fiber has been directly treated as an elastomer. It has two FBGs (#1FBG and #2FBG), which can be used to eliminate the interference from the vertical vibration direction and enhance the sensitivity by adding the two FBGs’ center wavelength shift. The two sides of the fiber are fixed on the base with glue, and the mass is fixed on the middle of the fiber. When the mass moves along the vertical direction, it will cause a contraction/expansion of the FBGs, finally indicing the two FBGs’ wavelengths shift, so the vibration will be obtained by the FBGs’ center wavelength shift.
Assume the micro-vibration sensor is working at constant temperature, so according to the basic principle of FBGs, the center wavelength shifts of #1FBG and #2FBG are separately defined as:
where λ
1and Δλ
2 represent the center wavelength of #1FBG and #2FBG, respectively;
ρe represents the strain-optic coefficient of the optical fiber;
ε1 and
ε2 are the axial strain of #1FBG and #2FBG, respectively.
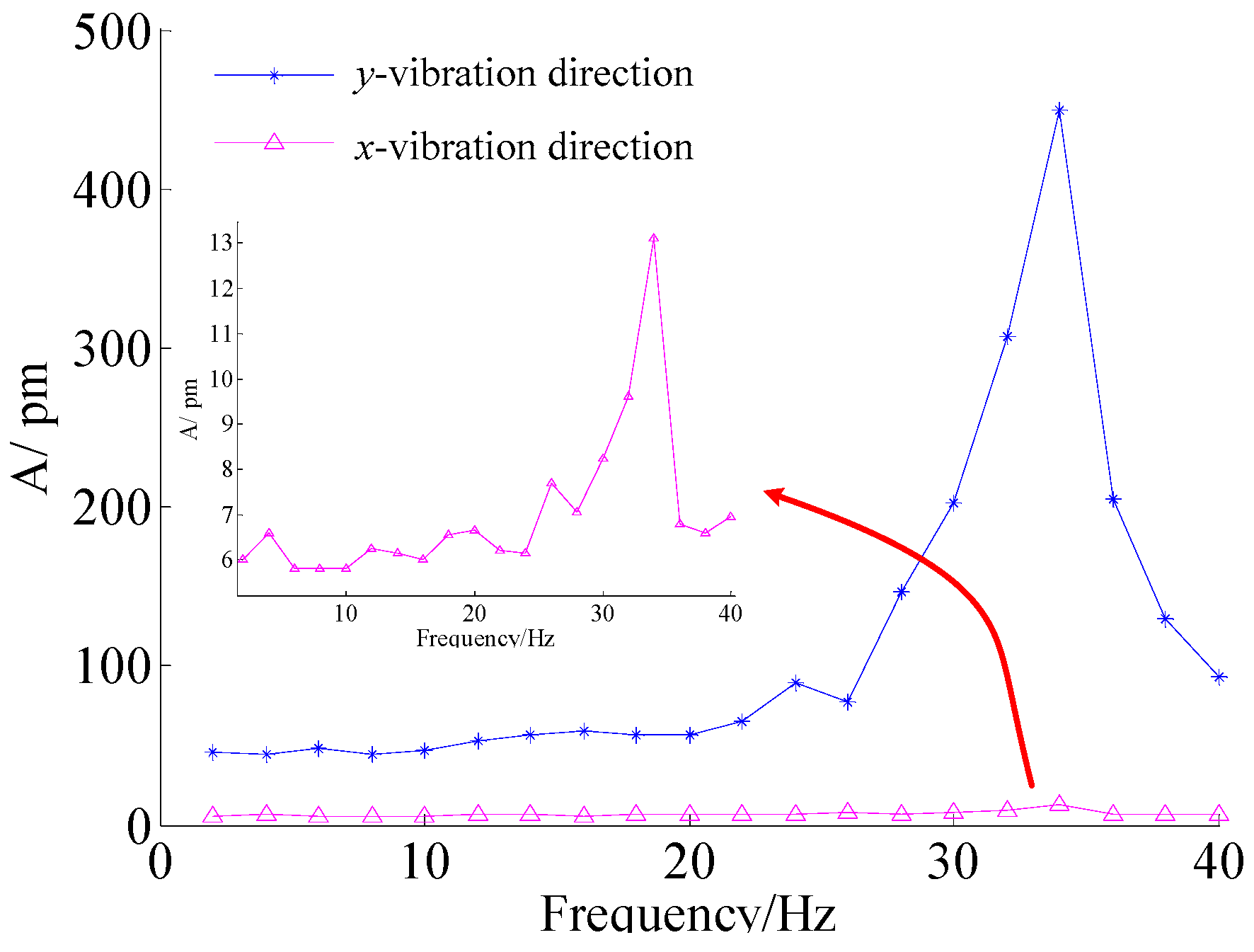
As a result of the existence of machining errors and assembly errors, when the sensor is working, there always occurs some vibration interference from the horizontal direction, which isn’t limited (
Figure 1), so #1FBG will be compressed or stretched under the inertial force of the horizontal direction, but the #2FBG is in the opposite state. The strain of the #1FBG and #2FBG are separately Δ
εx and −Δ
εx at any time. When the optical fiber moves under an inertial force in the vertical direction, both #1FBG and #2FBG will be compressed or stretched. Therefore, the strain increment of #1FBG Δ
εy is equal to the strain of #1FBG. Combining with Equation (12), the two FBGs’ center wavelengths can be rewritten as:
Since λ
1, λ
2 >> Δλ
1, Δλ
2 and λ
1 ≈ λ
2, combining Equation (13), the addition value Δλ
2 + Δλ
1 can be expressed as:
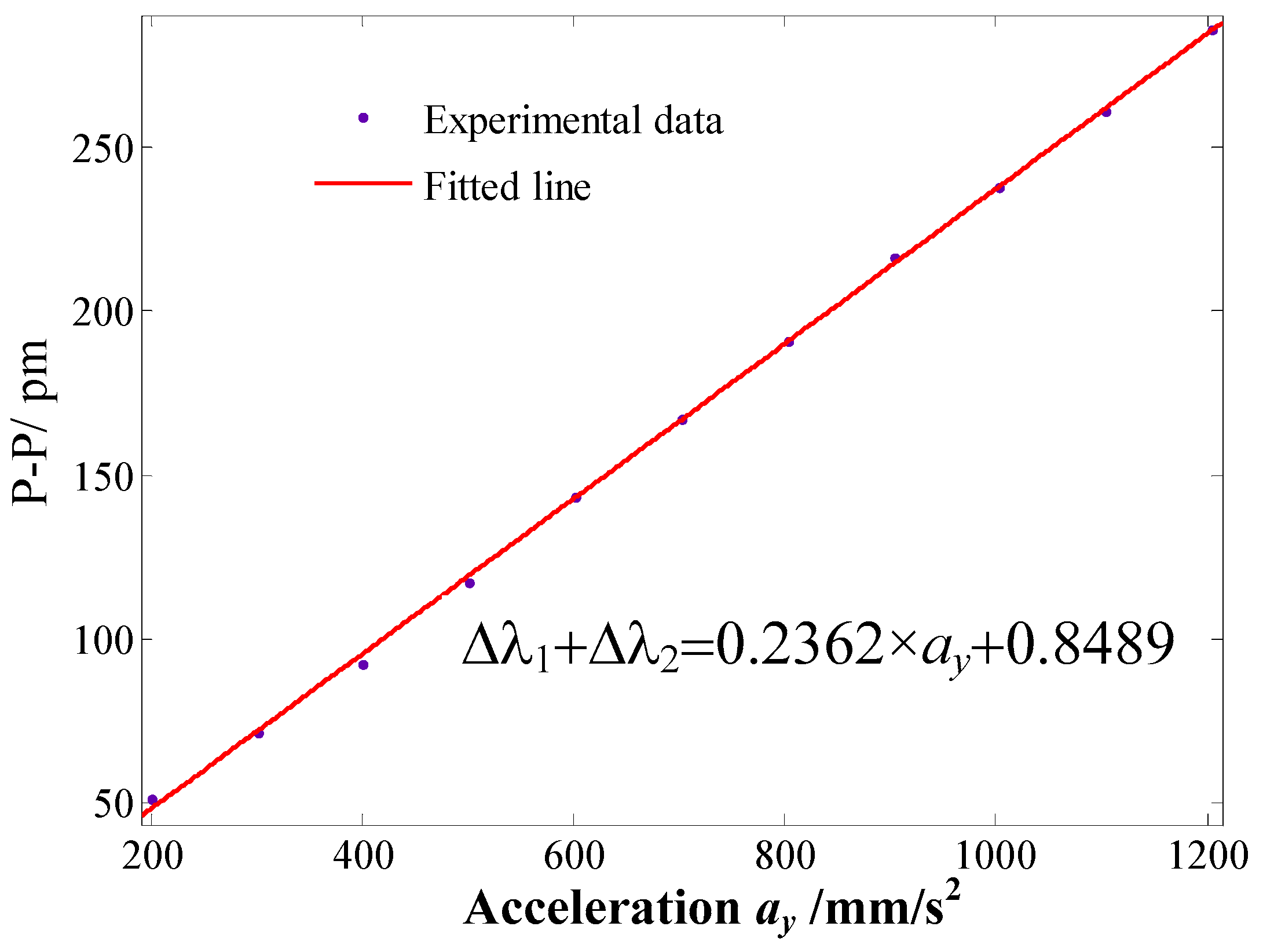
From Equation (14), Δλ
2 + Δλ
1 is only affected by
ay, and the vibration interference from the
x-direction is eliminated by the sum of two FBGs’ center wavelength shift. Also the sensitivity of the sensor is enhanced two times compared with the single FBG in Equation (11), which can be expressed by:
According to the Equation (15), the micro-vibration can be obviously obtained by the two FBGs’ center wavelength shift.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}