
Road-Aided Ground Slowly Moving Target 2D Motion Estimation for Single-Channel Synthetic Aperture Radar

 , ,
, ,
Abstract
:1. Introduction
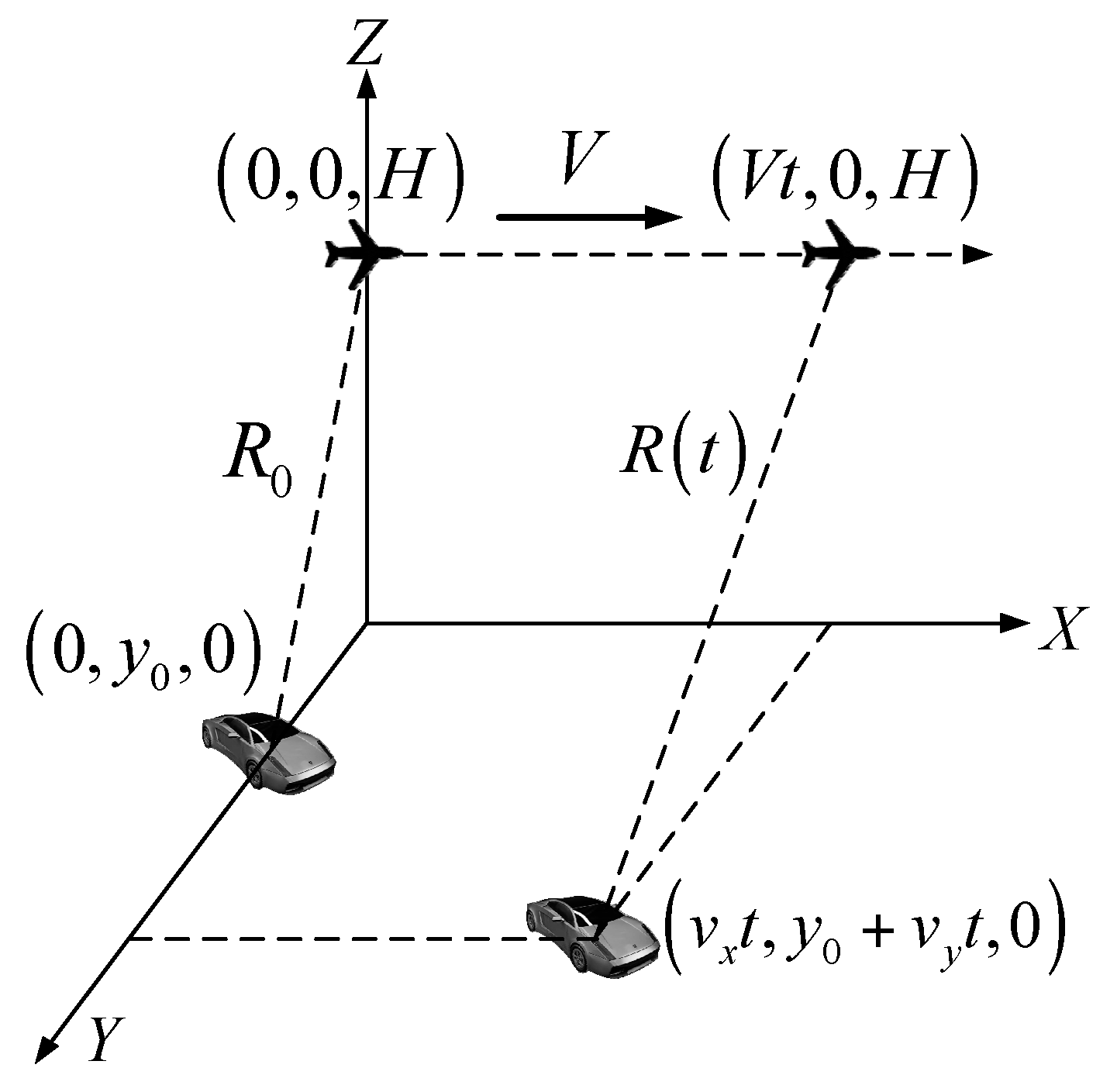
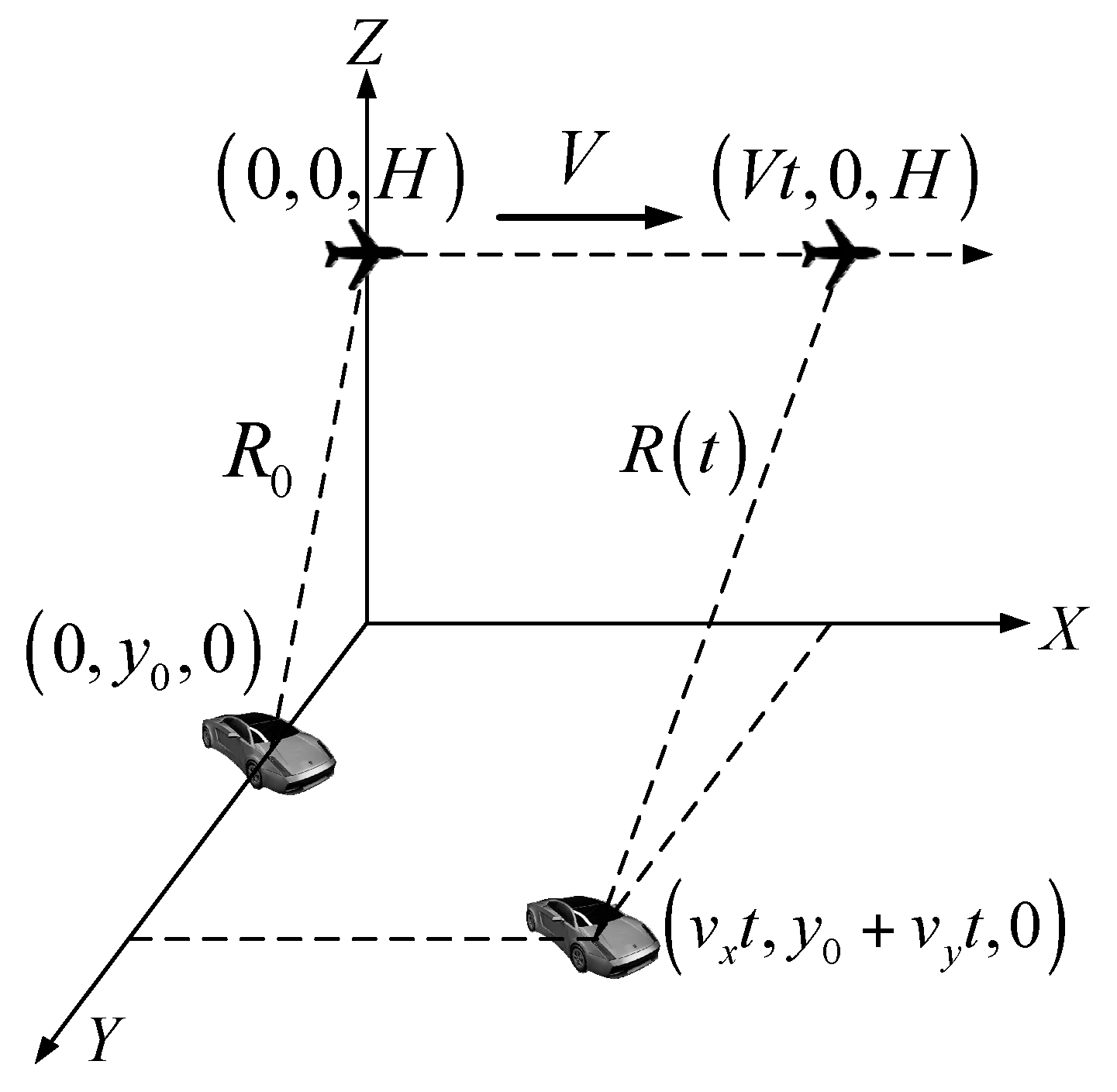
2. Signal Model of a Slowly Moving Target in SAR
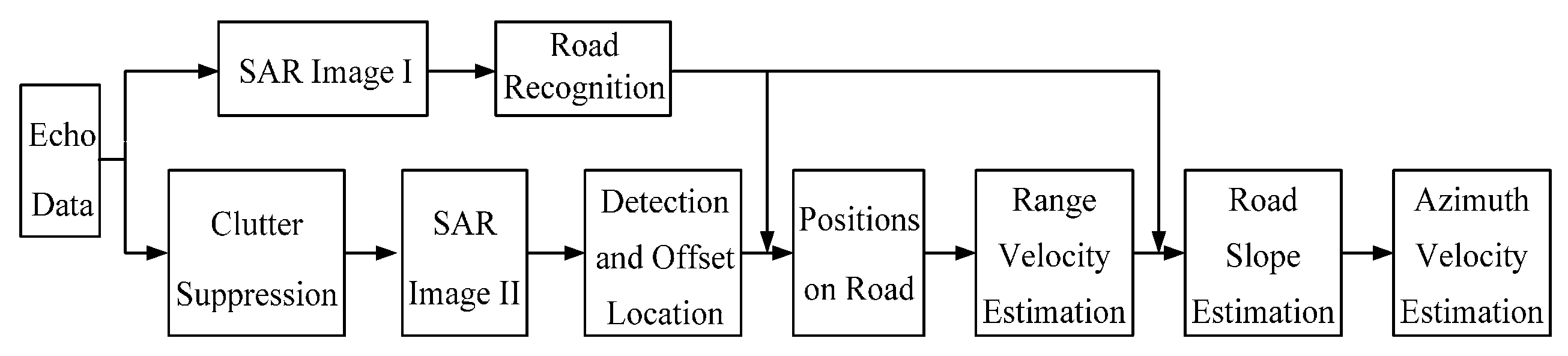
3. The Proposed GMTI Method Based on Radar Vision
3.1. Road Recognition
3.2. Stationary Clutter Filtering
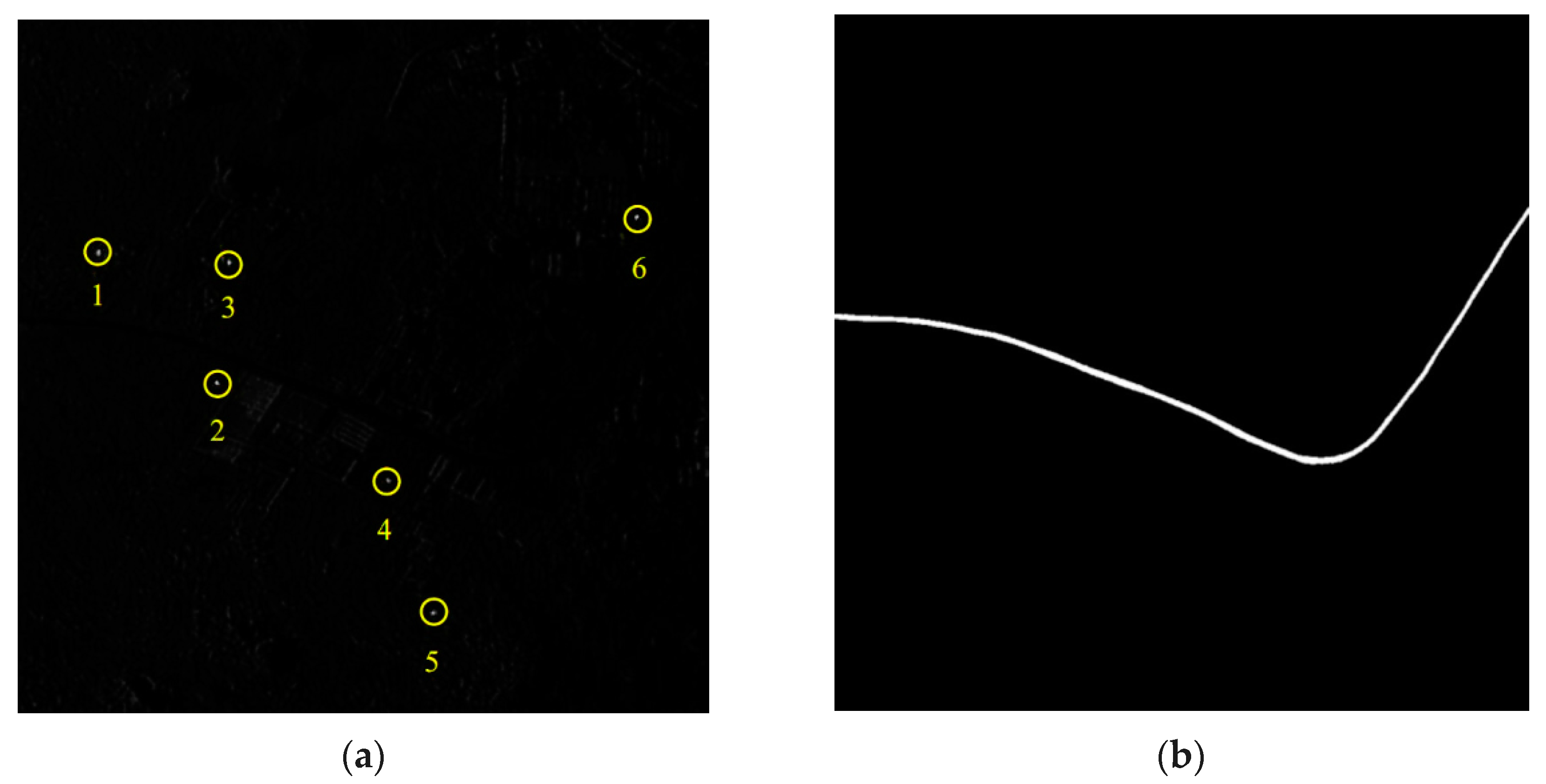
3.3. Moving Target Detection
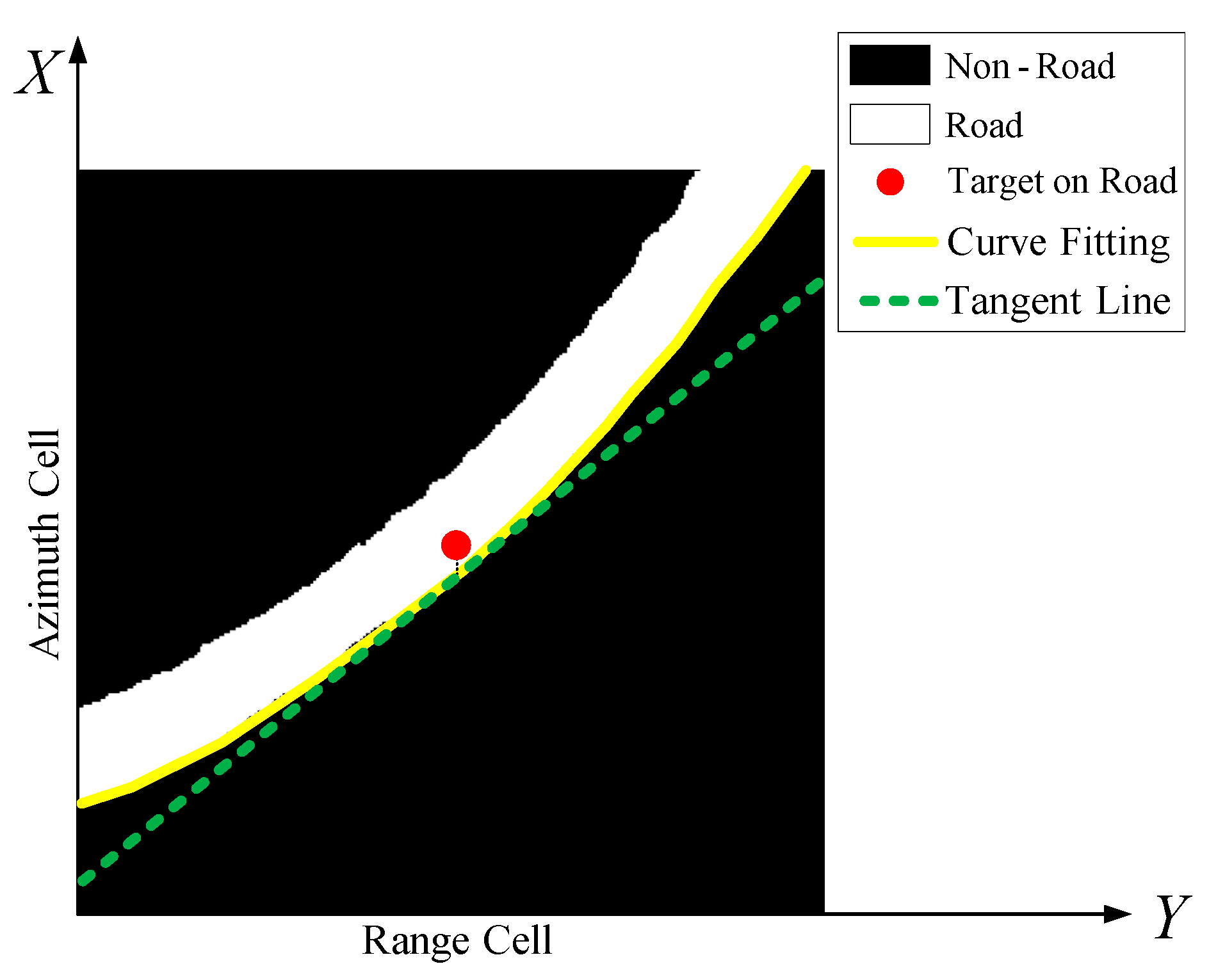
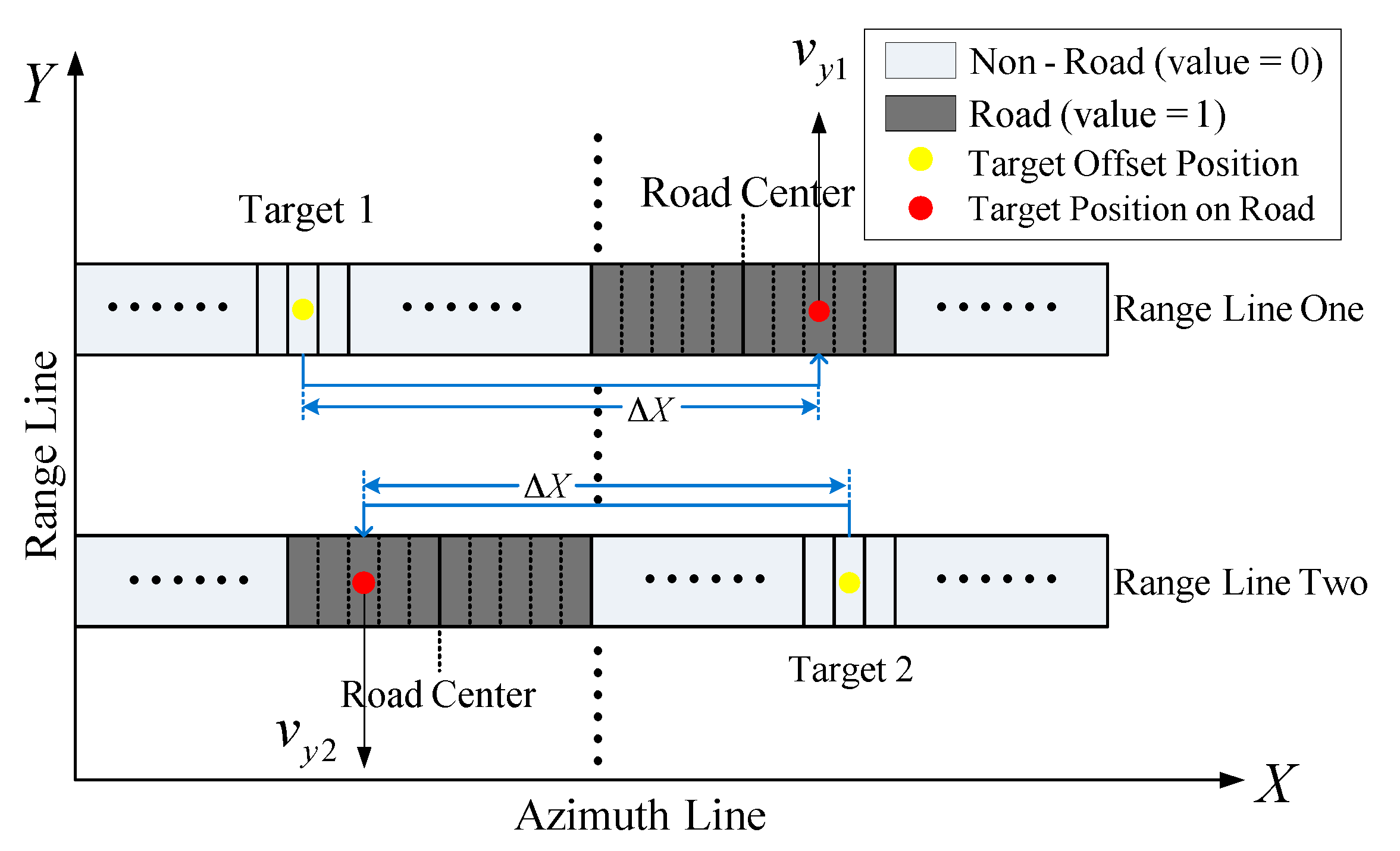
3.4. Moving Target Location on the Road
3.4.1. Range Line Extraction
3.4.2. Road Width Calculation
3.4.3. Offset Direction Determination from the Road
3.4.4. Target Range Velocity Direction
3.4.5. Estimation of Target Position on the Road
3.5. Range Velocity Estimation
3.6. Road Slope Estimation
3.7. Azimuth Velocity Estimation
4. Numerical Experiments and Performance Analysis
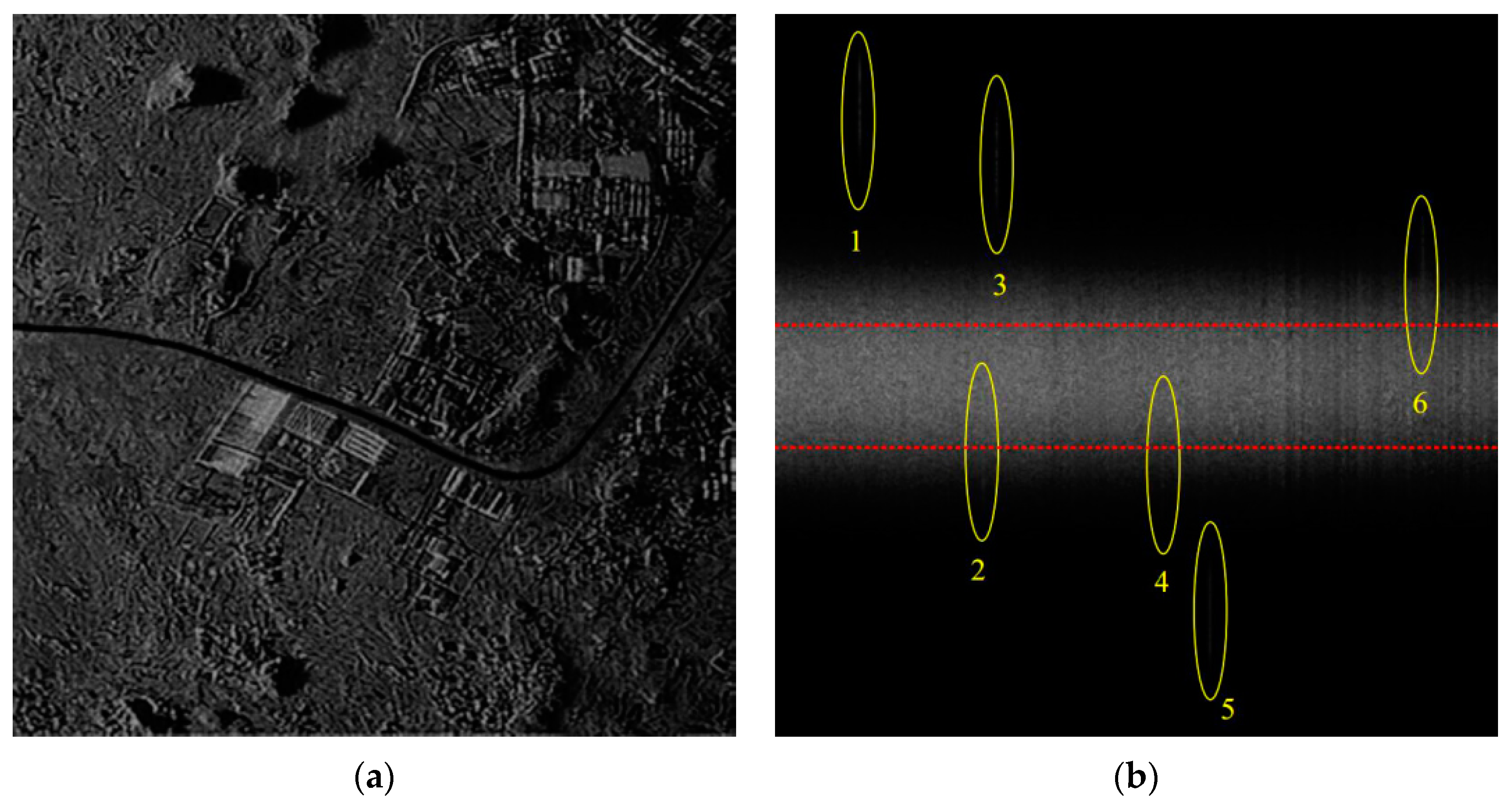
4.1. Numerical Experiments of a Slowly Moving Target
4.2. Estimation Accuracy Discussion
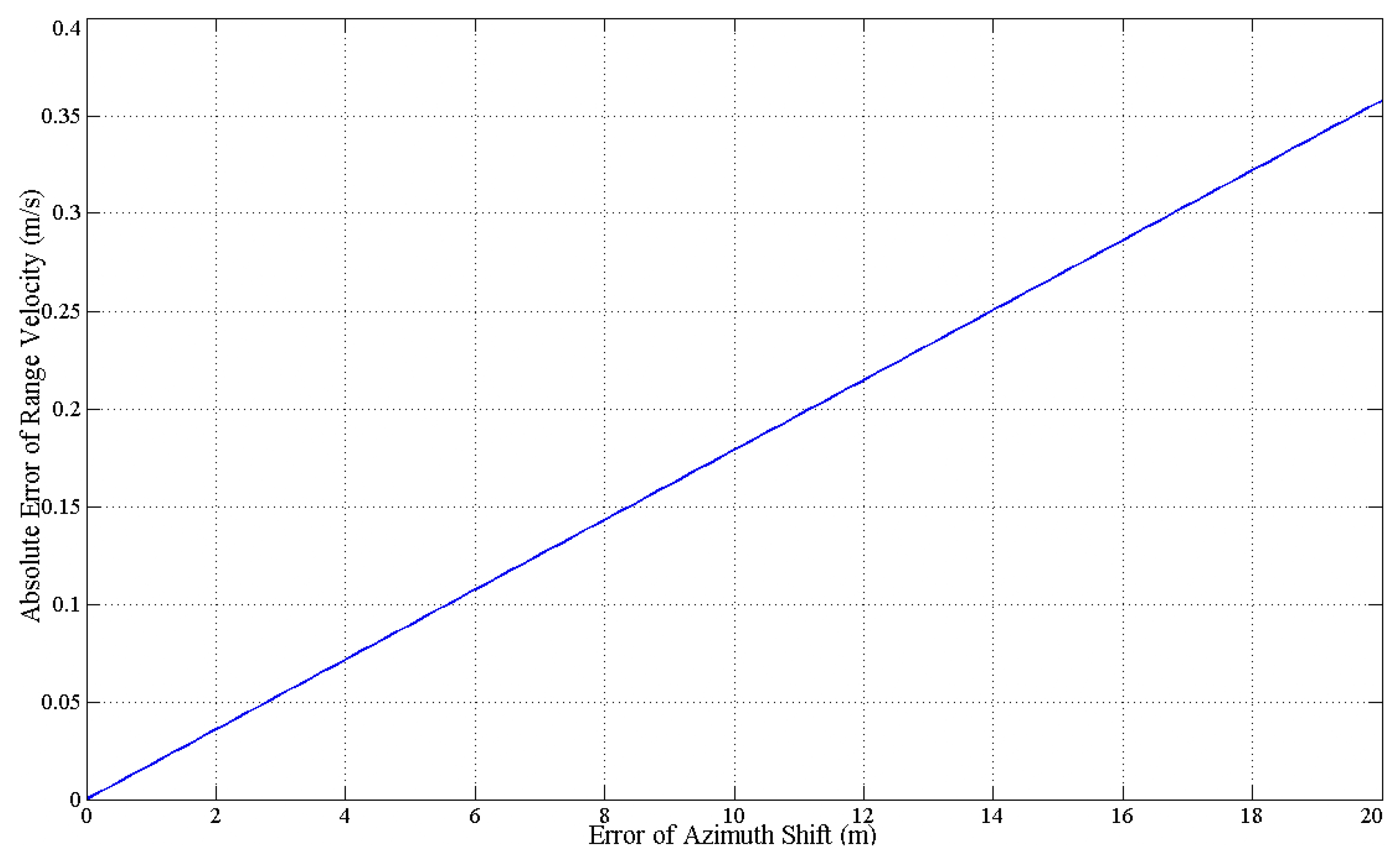
4.2.1. Estimation Accuracy of Range Velocity
- Formula approximation error
- Offset position error
- Location on road error
4.2.2. Azimuth Velocity Estimation Accuracy
4.3. 2-D Motion Estimation Ability
4.3.1. Range Velocity Estimation in a Single-Channel SAR
4.3.2. Azimuth Velocity Estimation
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Xu, J.; Li, G.; Peng, Y.N.; Xia, X.G.; Wang, Y.L. Parametric velocity synthetic aperture radar: Multilook processing and its applications. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3488–3508. [Google Scholar] [CrossRef]
- Zhang, X.P.; Liao, G.S.; Zhu, S.Q.; Gao, Y.C.; Xu, J.W. Geometry-information-aided efficient motion parameter estimation for moving-target imaging and location. IEEE Geosci. Remote Sens. Lett. 2015, 12, 155–159. [Google Scholar] [CrossRef]
- Wu, D.; Zhu, D.Y.; Shen, M.W.; Li, Y. Statistical analysis of monopulse-synthetic aperture radar for constant false-alarm rate detection of ground moving targets. IET Radar Sonar Navig. 2015, 9, 641–652. [Google Scholar] [CrossRef]
- Chen, Z.Y.; Wang, T. Two-stage channel calibration technique for multichannel synthetic aperture radar-ground moving target indication systems. IET Radar Sonar Navig. 2014, 8, 1116–1126. [Google Scholar] [CrossRef]
- Raney, R. Synthetic aperture imaging radar and moving targets. IEEE Trans. Aerosp. Electron. Syst. 1971, 7, 499–505. [Google Scholar] [CrossRef]
- Xu, J.; Zuo, Y.; Xia, B.; Xia, X.G.; Peng, Y.N.; Wang, Y.L. Ground moving target signal analysis in complex image domain for multichannel SAR. IEEE Trans. Geosci. Remote Sens. 2012, 50, 538–552. [Google Scholar] [CrossRef]
- Bacci, A.; Martorella, M.; Gray, D.A.; Gelli, S.; Berizzi, F. Virtual multichannel SAR for ground moving target imaging. IET Radar Sonar Navig. 2016, 10, 50–62. [Google Scholar] [CrossRef]
- Zhu, S.Q.; Liao, G.S.; Qu, Y.; Zhou, Z.G. Ground moving targets detection and unambiguous motion parameter estimation based on multi-channel SAR system. In Proceedings of IET International Radar Conference, Guilin, China, 20–22 April 2009; pp. 1–4.
- Baumgartner, S.V.; Krieger, G. Real-time road traffic monitoring using a fast a priori knowledge based SAR-GMTI algorithm. In Proceedings of 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 1843–1846.
- Meyer, F.; Hinz, S.; Laika, A.; Weihing, D.; Bamler, R. Performance analysis of the TerraSAR-X Traffic monitoring concept. Isprs J. Photogr. Remote Sens. 2006, 61, 225–242. [Google Scholar] [CrossRef]
- Suchandt, S.; Eineder, M.; Muller, R.; Laika, A.; Hinz, S.; Meyer, E.; Palubinskas, G. Development of a GMTI processing system for the extraction of traffic information from TerraSAR-X data. In Proceedings of EUSAR 2006 Conference, Dresden, Germany, 16–18 May 2006.
- Simon, H. Radar vision. In Proceedings of IEEE International Record, Arlington, VA, USA, 7–10 May 1990; pp. 585–588.
- Wang, X.; Xu, L.H.; Sun, H.S.; Xin, J.M.; Zheng, N.N. Bionic vision inspired on-road obstacle detection and tracking using radar and visual information. In Proceedings of 17th International Conference on Intelligent Transportation Systems, Qingdao, China, 8–11 October 2014; pp. 39–44.
- Kim, H.; Song, B. Vehicle recognition based on radar and vision sensor fusion for automatic emergency braking. In Proceedings of the 13th International Conference on Control Automation and Systems, Gwangju, Korea, 20–23 October 2013; pp. 1342–1346.
- Wang, T.; Xin, J.M.; Zheng, N.N. A method integrating human visual attention and consciousness of radar and vision fusion for autonomous vehicle navigation. In Proceedings of the IEEE Fourth International Conference on Space Mission Challenges for Information Technology, Palo Alto, CA, USA, 2–4 August 2011; pp. 192–197.
- Zhang, H.L.; Li, Z.L.; Wang, Y.; Zhang, X.W. Road recognition in high resolution SAR image based on genetic algorithm. In Proceedings of the IEEE International Conference on Information Acquisition, Weihai, China, 20–23 August 2006; pp. 649–654.
- Sonka, M.; Hlavac, V.; Boyle, R. Image Processing, Analysis, and Machine Vision; Chapman & Hall: London, UK, 1993. [Google Scholar]
- Peng, S.B.; Xu, J.; Peng, Y.N.; Xiang, J.B. ISAR rotation velocity estimation based on phase slope difference of two prominent scatterers. IET Radar Sonar Navig. 2011, 5, 1002–1009. [Google Scholar] [CrossRef]
- Gao, F.; Chen, B.N.; Zhou, R.; Sun, J.P. Road extraction and its application in moving target detection in SAR images. In Proceedings of International Conference on Mechanic Automation and Control Engineering, Wuhan, China, 25–27 June 2010; pp. 1150–1153.
- Xu, G.; Sun, H.; Yang, W.; Shuai, Y.M. An improved road extraction method based on MRFs in rural areas for SAR images. In Proceedings of 1st Asian and Pacific Conference on Synthetic Aperture Radar, Huangshan, China, 5–7 November 2007; pp. 489–492.
- Xu, J.; Peng, Y.N.; Xia, X.G. Parametric autofocus of SAR imaging-inherent accuracy limitations and realization. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2397–2411. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Target | Motion Parameters | Parameters Estimated | ||||||
|---|---|---|---|---|---|---|---|---|
| The Proposed Method | EBA before Filtering | EBA after Filtering | CDE before Filtering | CDE after Filtering | ||||
| vy (m/s) | vx (m/s) | vy (m/s) | vx (m/s) | vy (m/s) | vy (m/s) | vy (m/s) | vy (m/s) | |
| 1 | 4.53 | 0.21 | 4.5443 | 0.2036 | 4.5272 | 4.5272 | 4.5317 | 4.5317 |
| 2 | −1.25 | −0.28 | −1.2479 | −0.2978 | −0.0250 | −1.0793 | −0.0451 | −1.1024 |
| 3 | 3.56 | 0.79 | 3.5629 | 0.7785 | 3.5588 | 3.5588 | 3.5615 | 3.5615 |
| 4 | −1.58 | −0.47 | −1.5758 | −0.4524 | −0.0051 | −1.0886 | −0.0107 | −1.0035 |
| 5 | −3.95 | −1.10 | −3.9573 | −1.0793 | −3.9536 | −3.9536 | −3.9472 | −3.9472 |
| 6 | 1.85 | −1.69 | 1.8481 | −1.7197 | 0.1260 | 1.5131 | 0.1246 | 1.4938 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Xu, J.; Huang, Z.; Zhang, X.; Xia, X.-G.; Long, T.; Bao, Q. Road-Aided Ground Slowly Moving Target 2D Motion Estimation for Single-Channel Synthetic Aperture Radar. Sensors 2016, 16, 383. https://doi.org/10.3390/s16030383
Wang Z, Xu J, Huang Z, Zhang X, Xia X-G, Long T, Bao Q. Road-Aided Ground Slowly Moving Target 2D Motion Estimation for Single-Channel Synthetic Aperture Radar. Sensors. 2016; 16(3):383. https://doi.org/10.3390/s16030383
Chicago/Turabian StyleWang, Zhirui, Jia Xu, Zuzhen Huang, Xudong Zhang, Xiang-Gen Xia, Teng Long, and Qian Bao. 2016. "Road-Aided Ground Slowly Moving Target 2D Motion Estimation for Single-Channel Synthetic Aperture Radar" Sensors 16, no. 3: 383. https://doi.org/10.3390/s16030383