
XpertTrack: Precision Autonomous Measuring Device Developed for Real Time Shipments Tracker


Abstract
:1. Introduction
2. XpertTrack: Technical and General Specifications
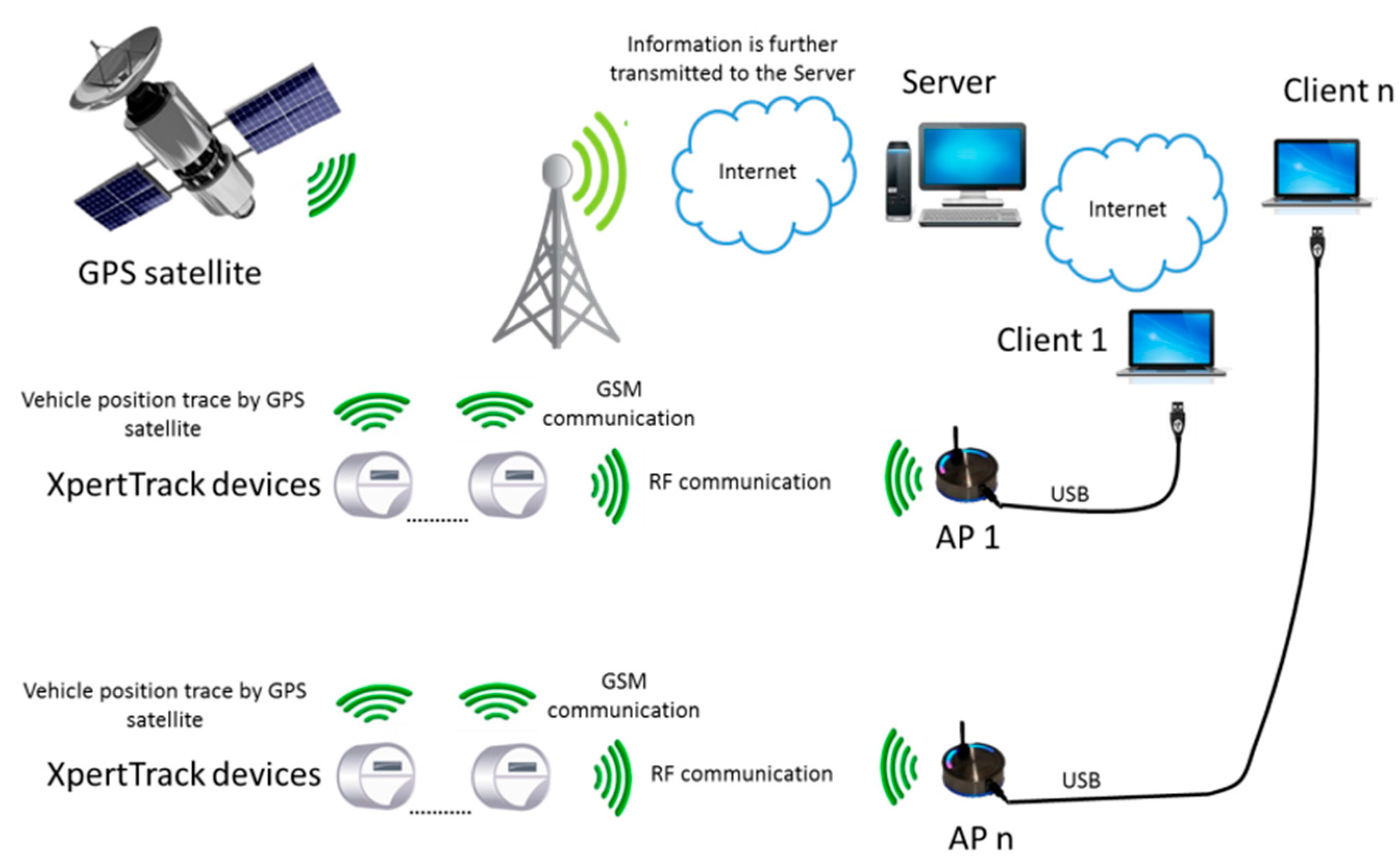
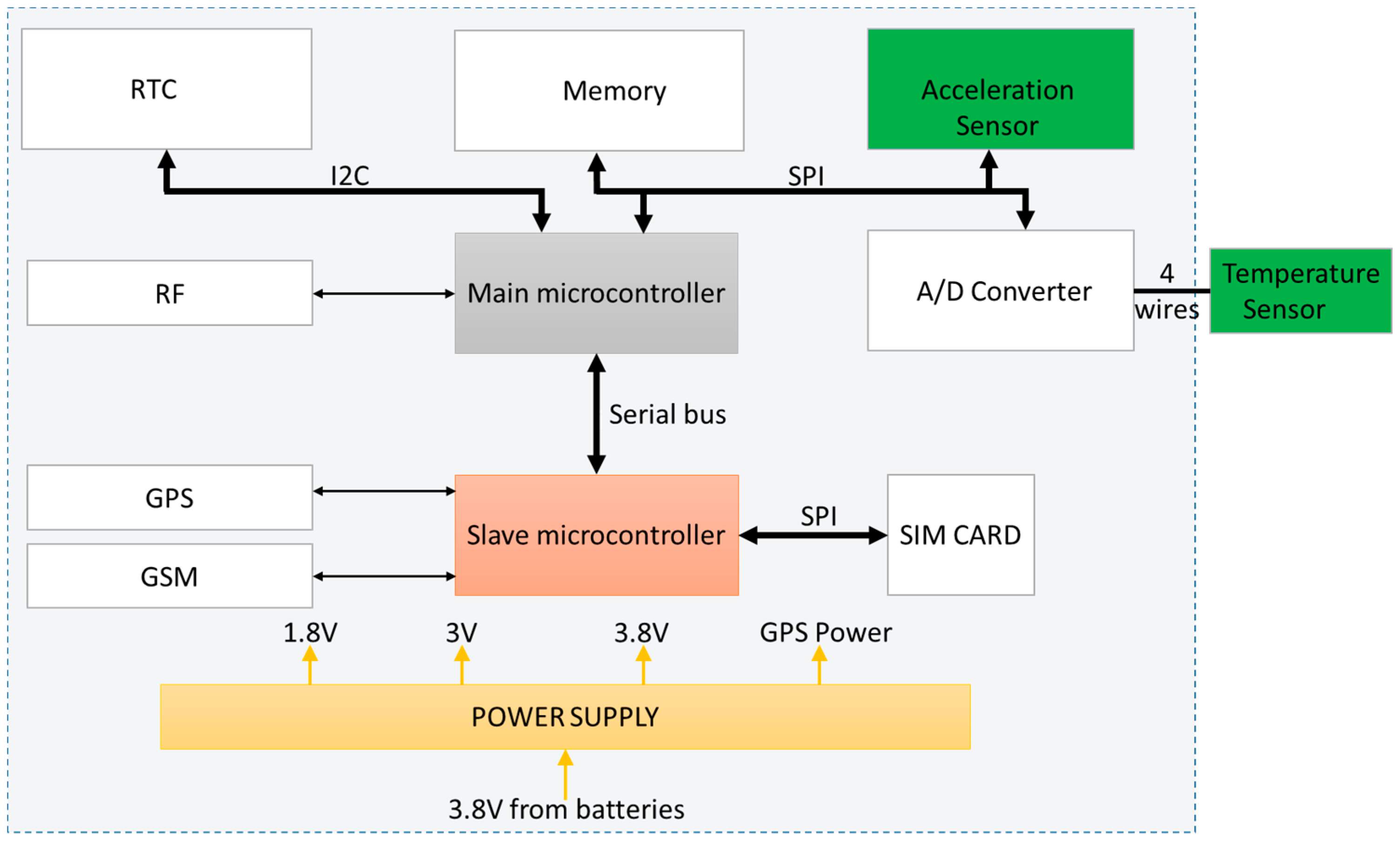
3. General Overview of System Architecture
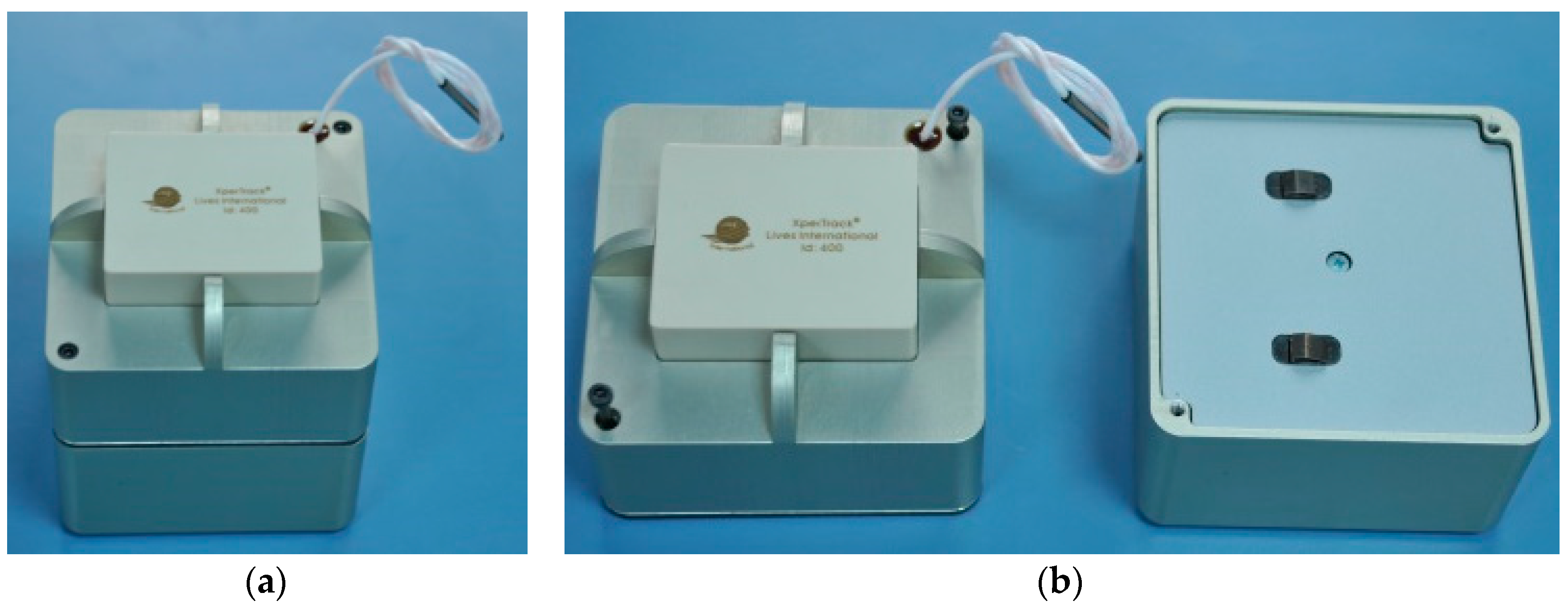
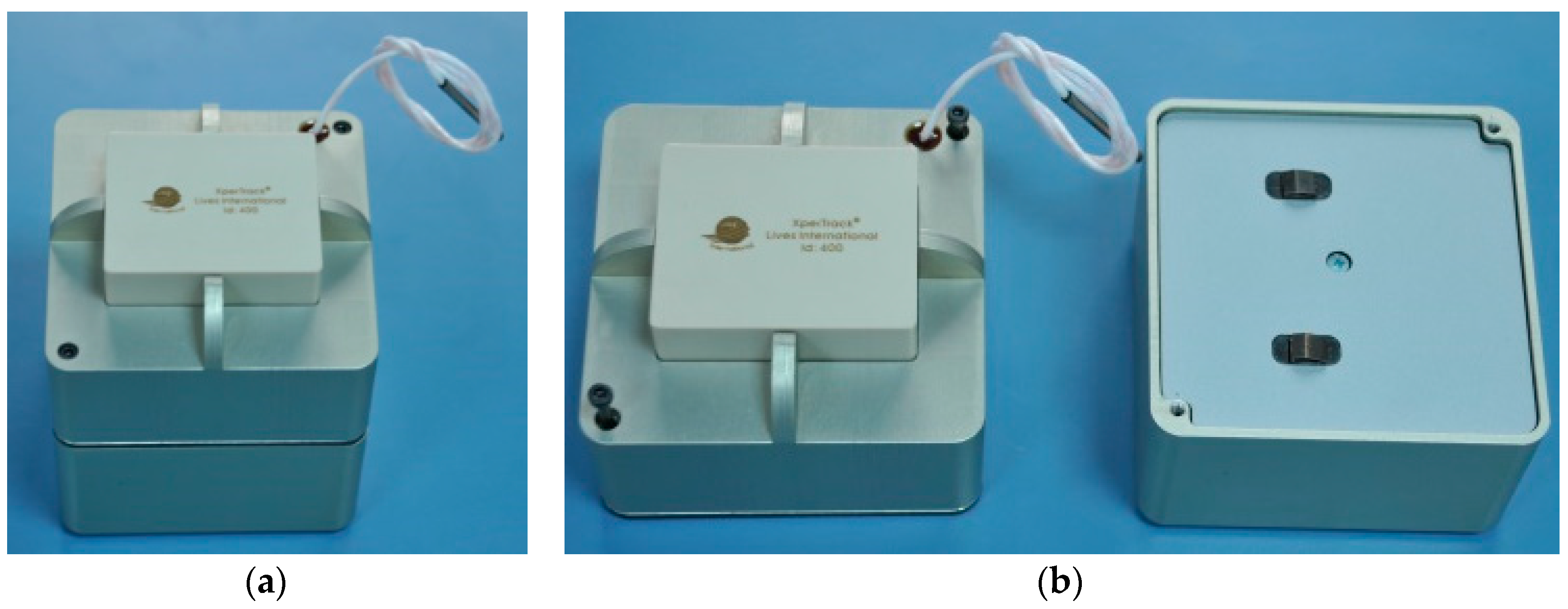
4. Device Concept
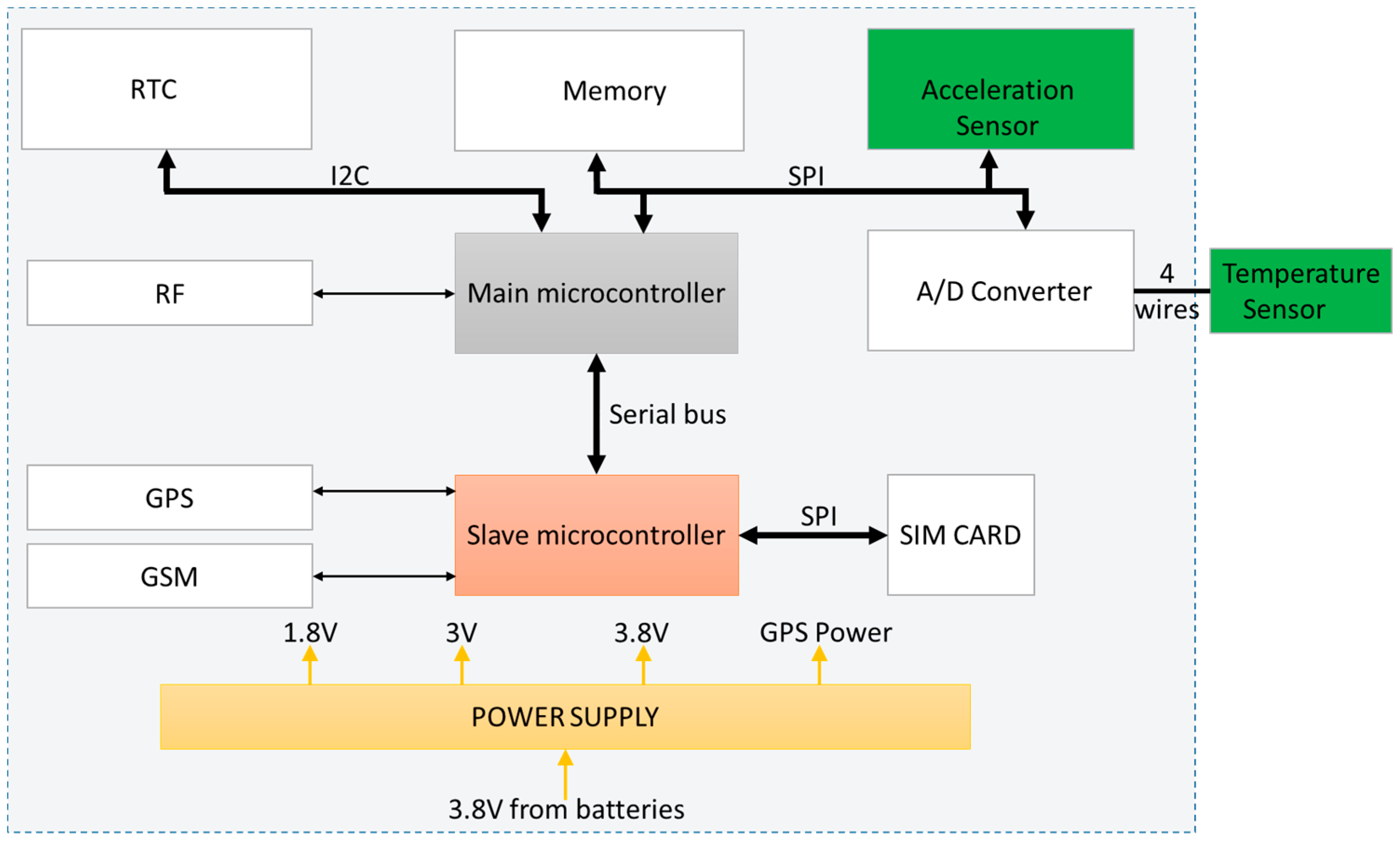
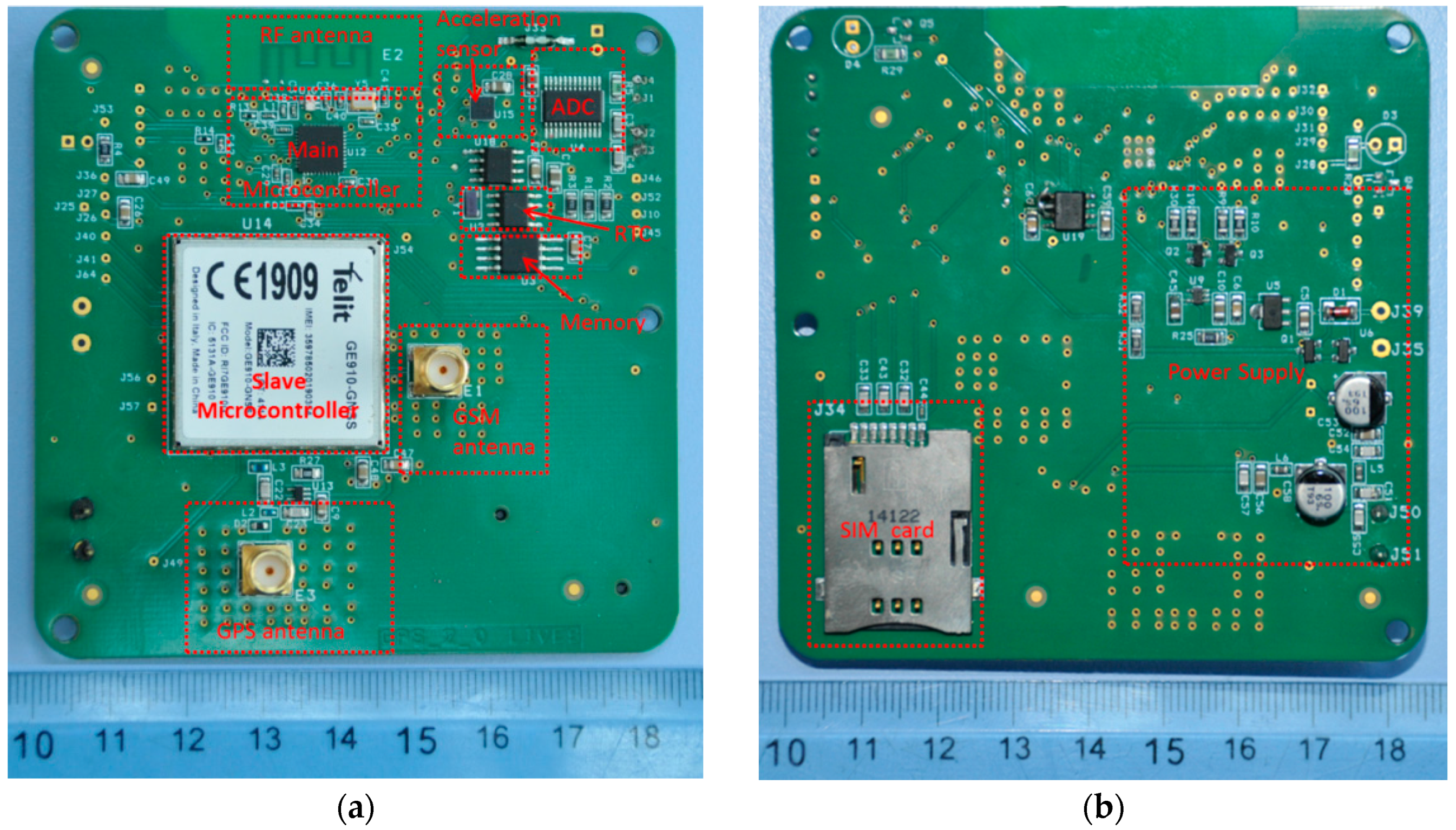
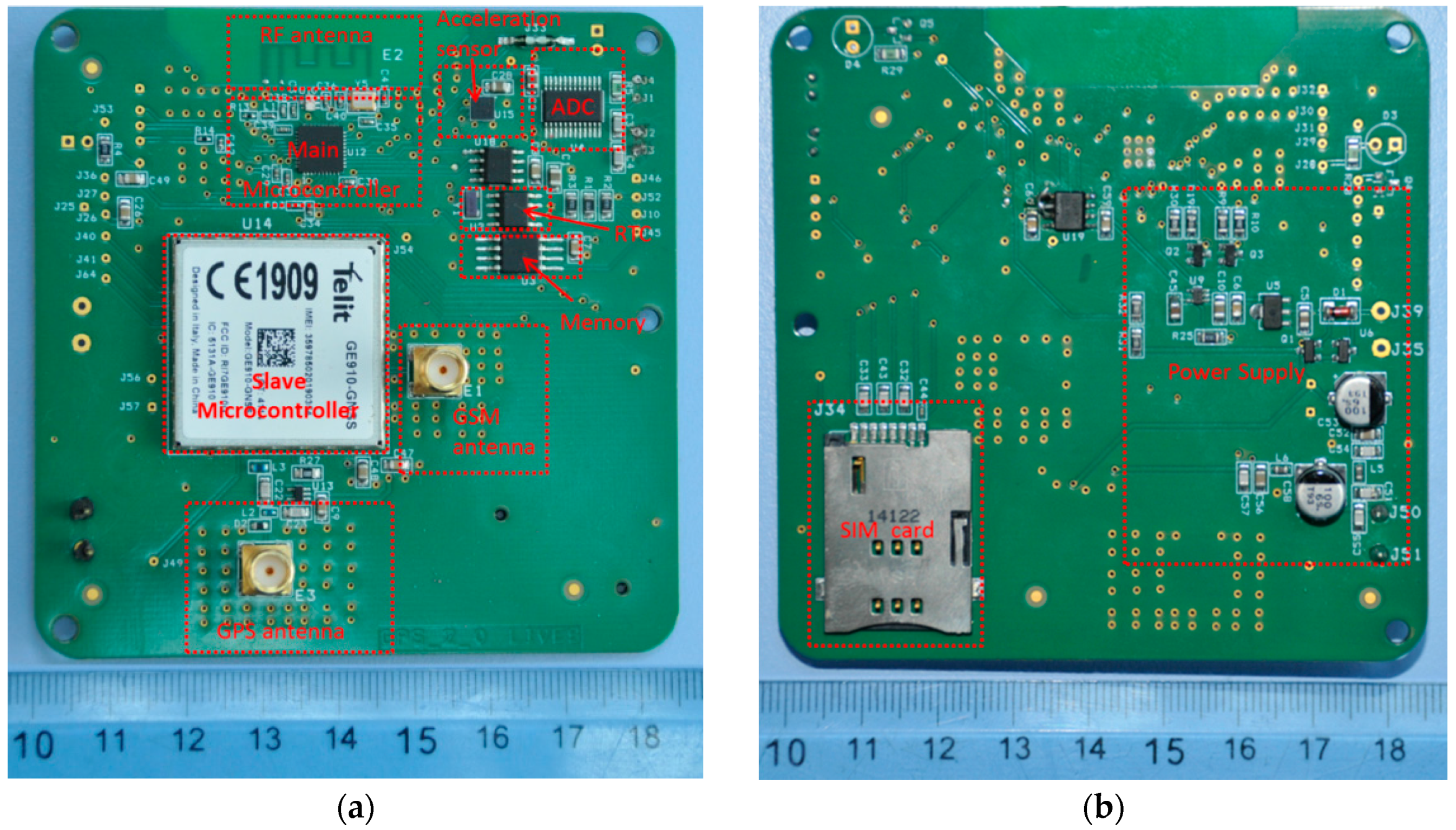
4.1. Electronic Design
- For temperatures below 0 °C, Equation (4) is used, and the deviation ΔW is determined using relation Equation (5):
- For temperatures above 0 °C, Equation (6) is used, and the deviation ΔW is determined using relation Equation (7):
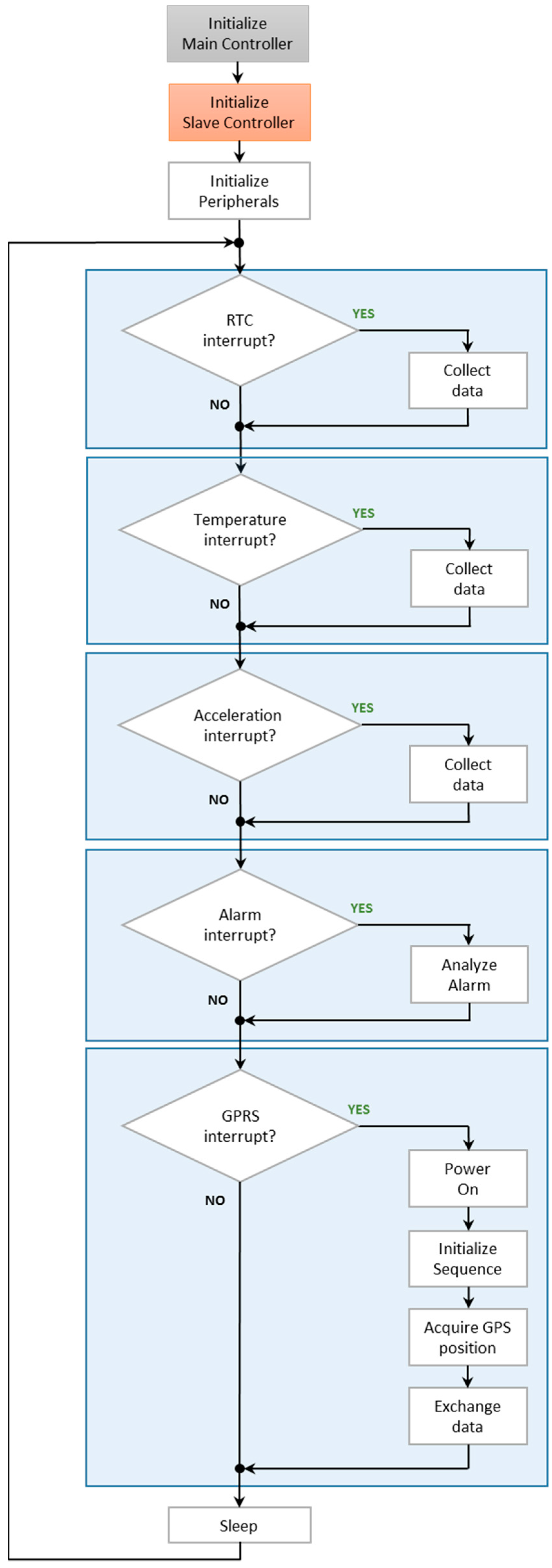
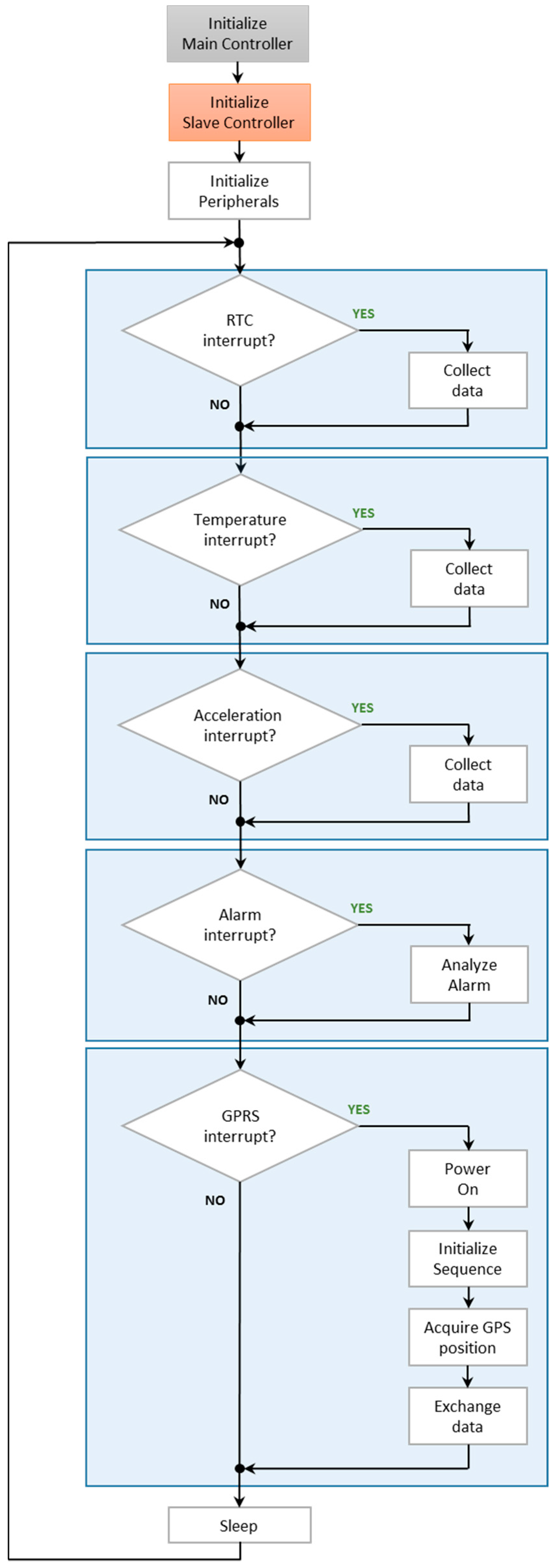
4.2. Firmware Design
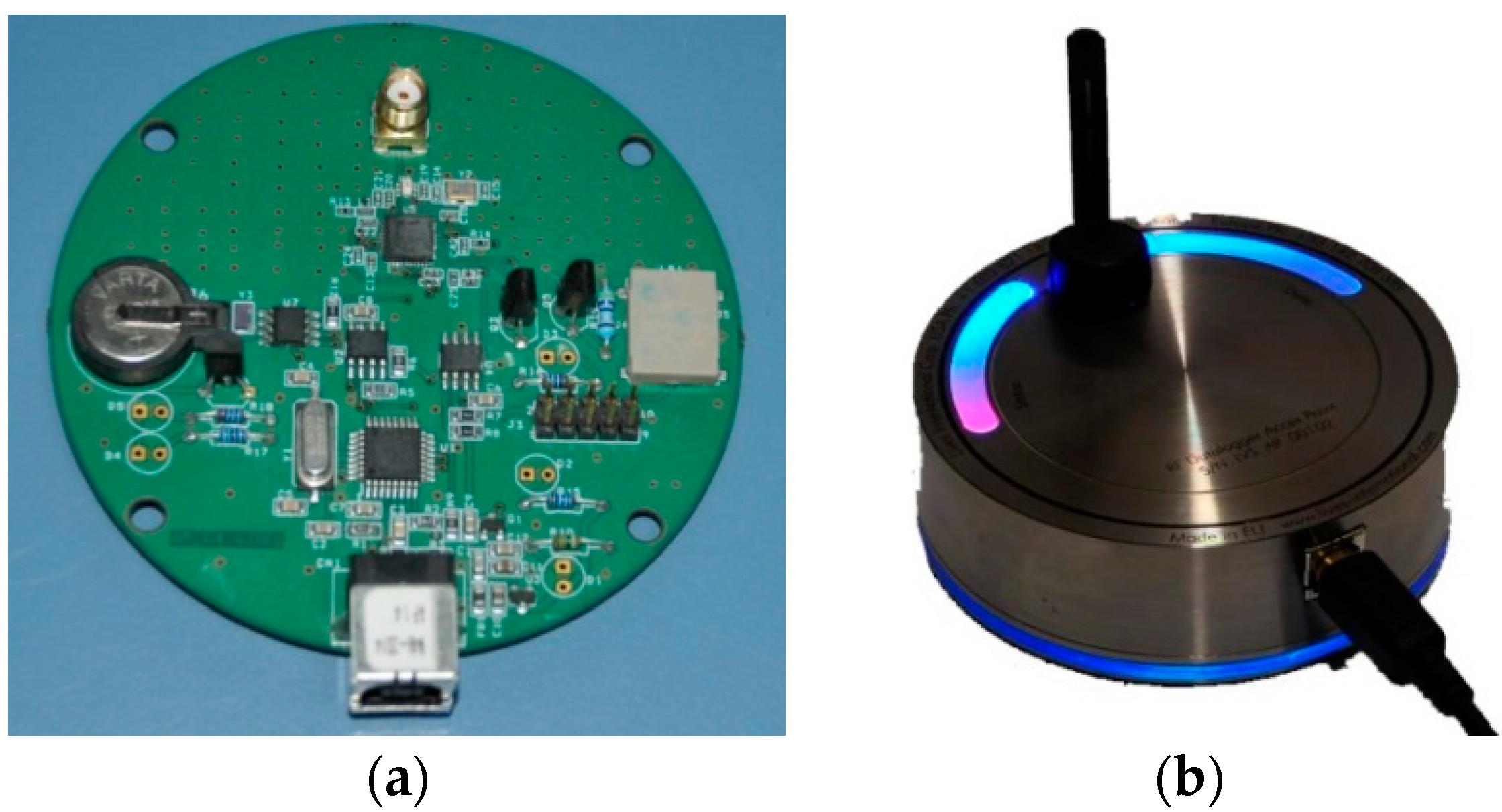
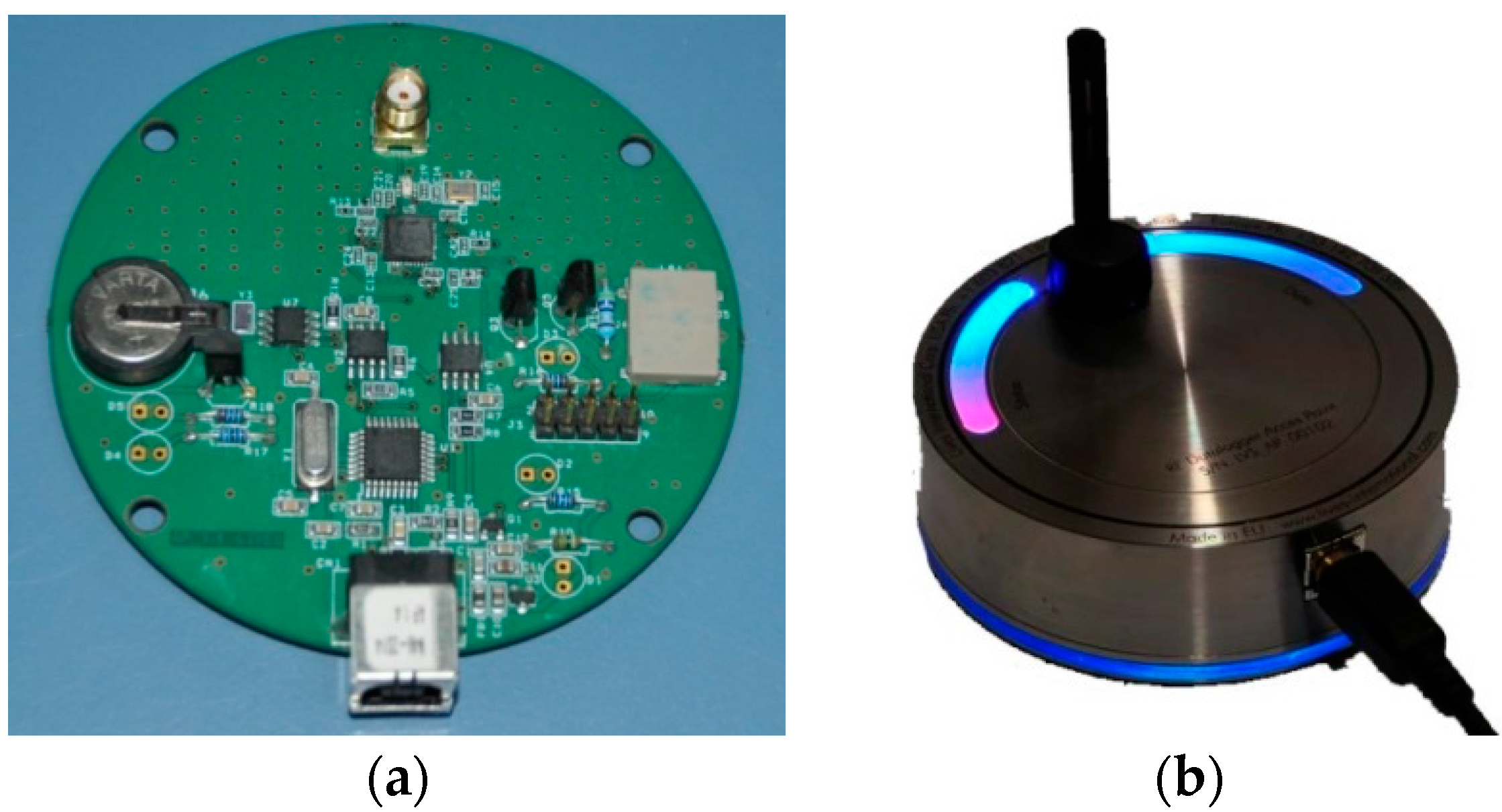
5. Device Implementation
5.1. Printed Circuit Board (PCB) Designing
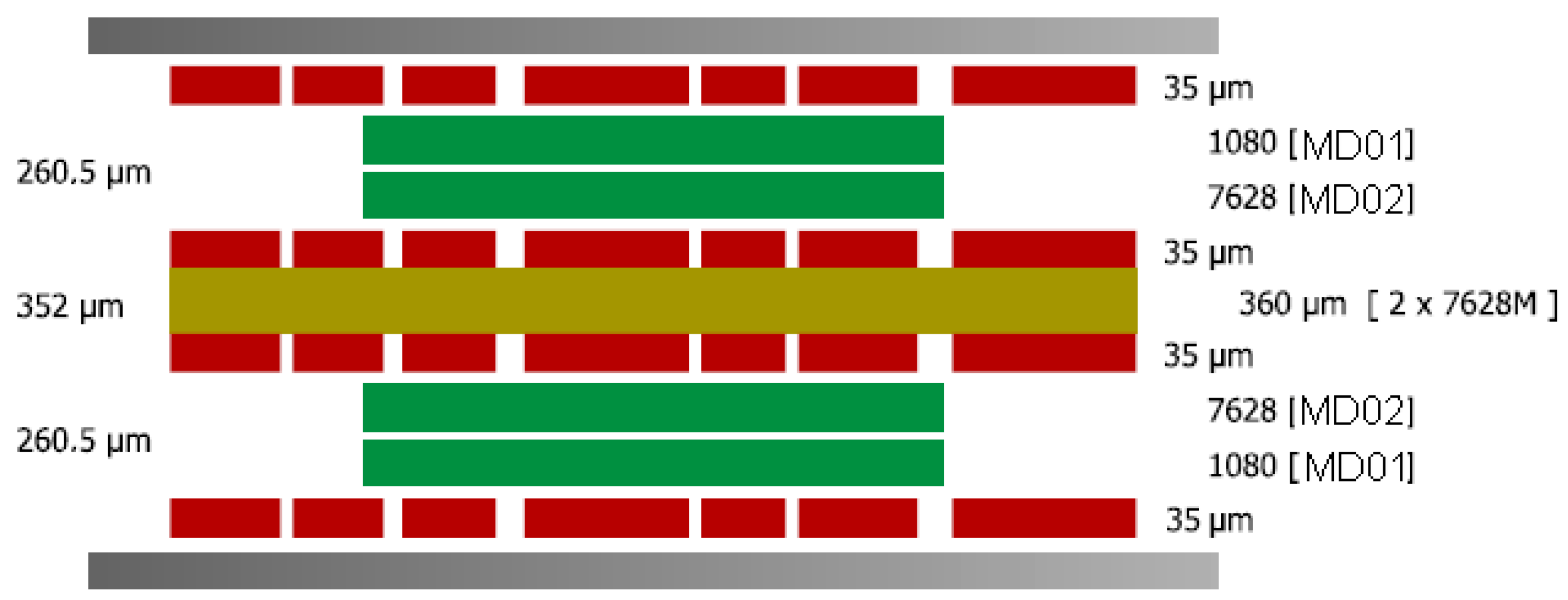
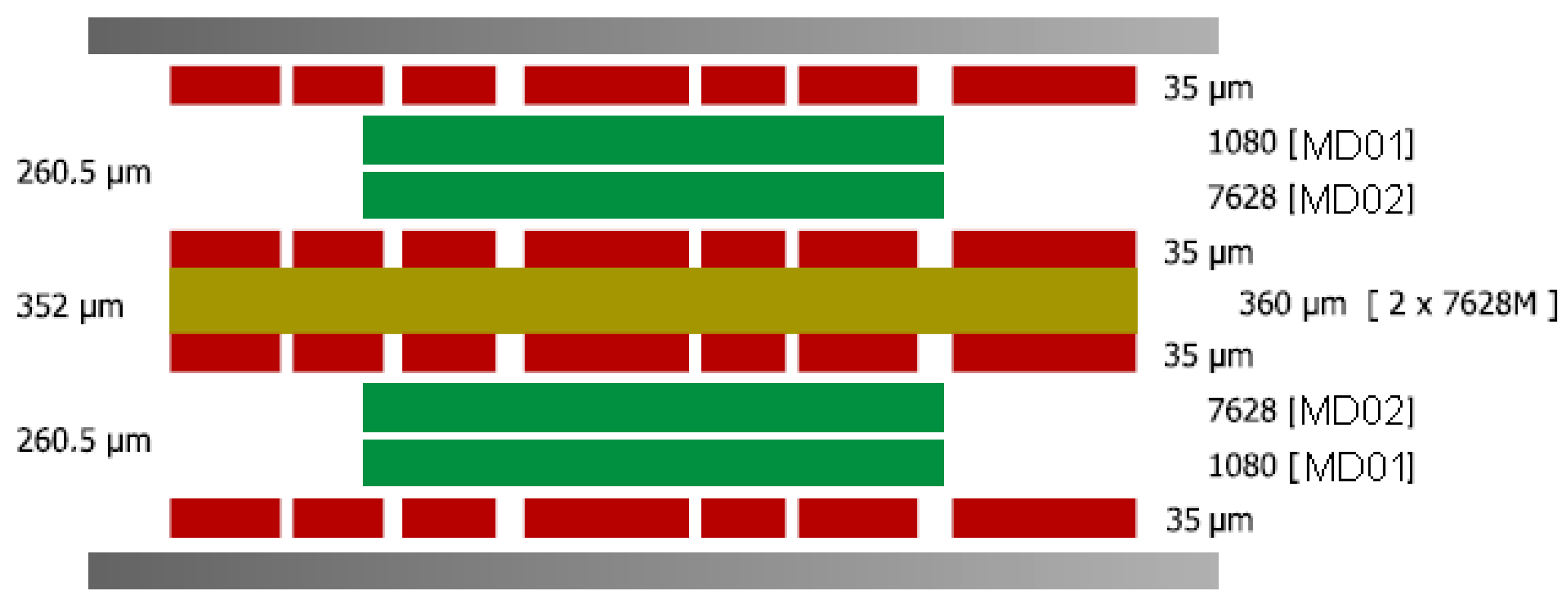
5.2. Stack-Up Layers Definition
- high thermal resistance; T260 > 60 min, T288 = 30 min, TD: +360 °C;
- high resistance to chemical attack;
- CAF-enhanced;
- excellent resistance to heat shock (withstands six solder test repetitions of 10 s at +288 °C); and
- completely cures without follow-up post baking.
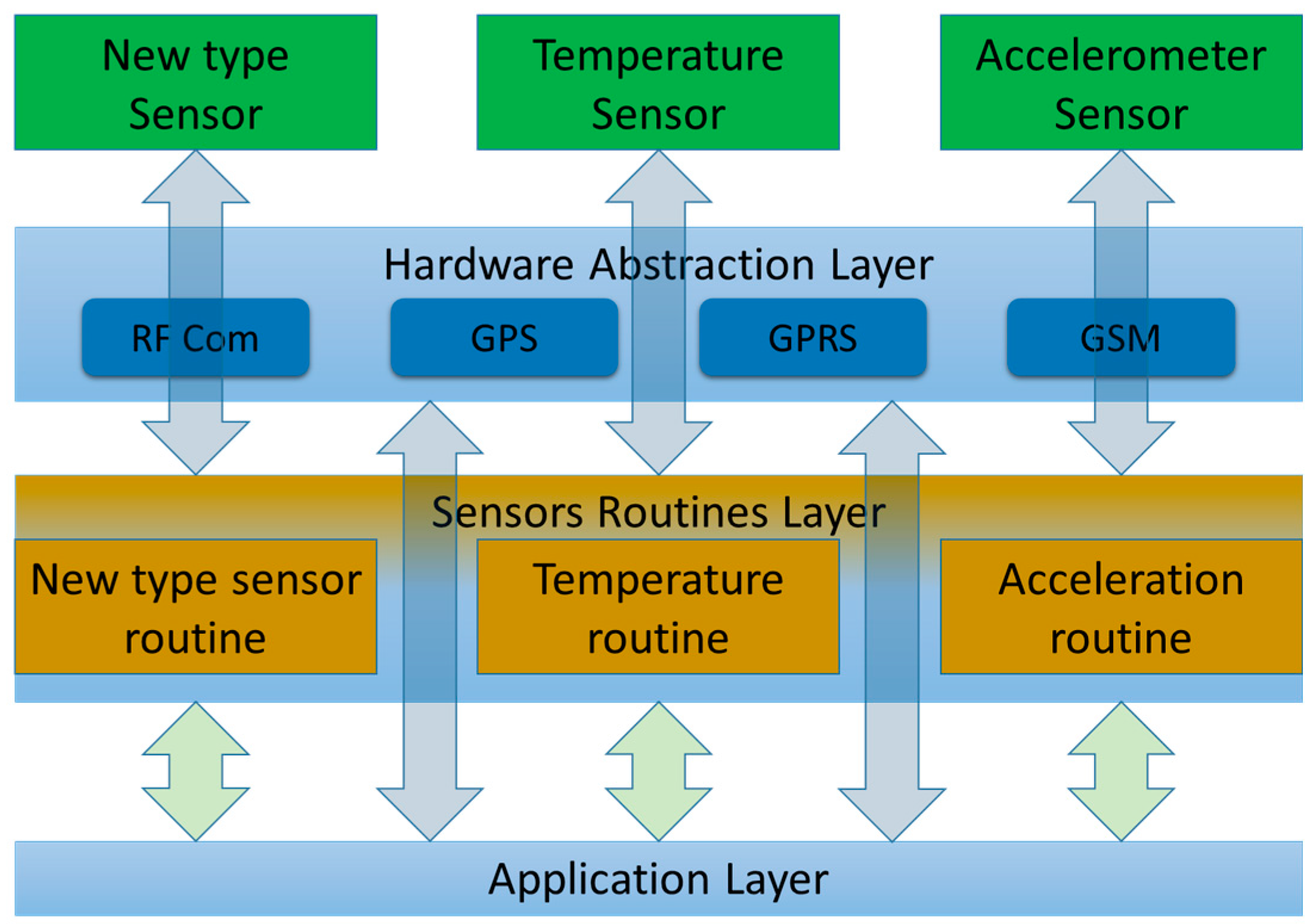
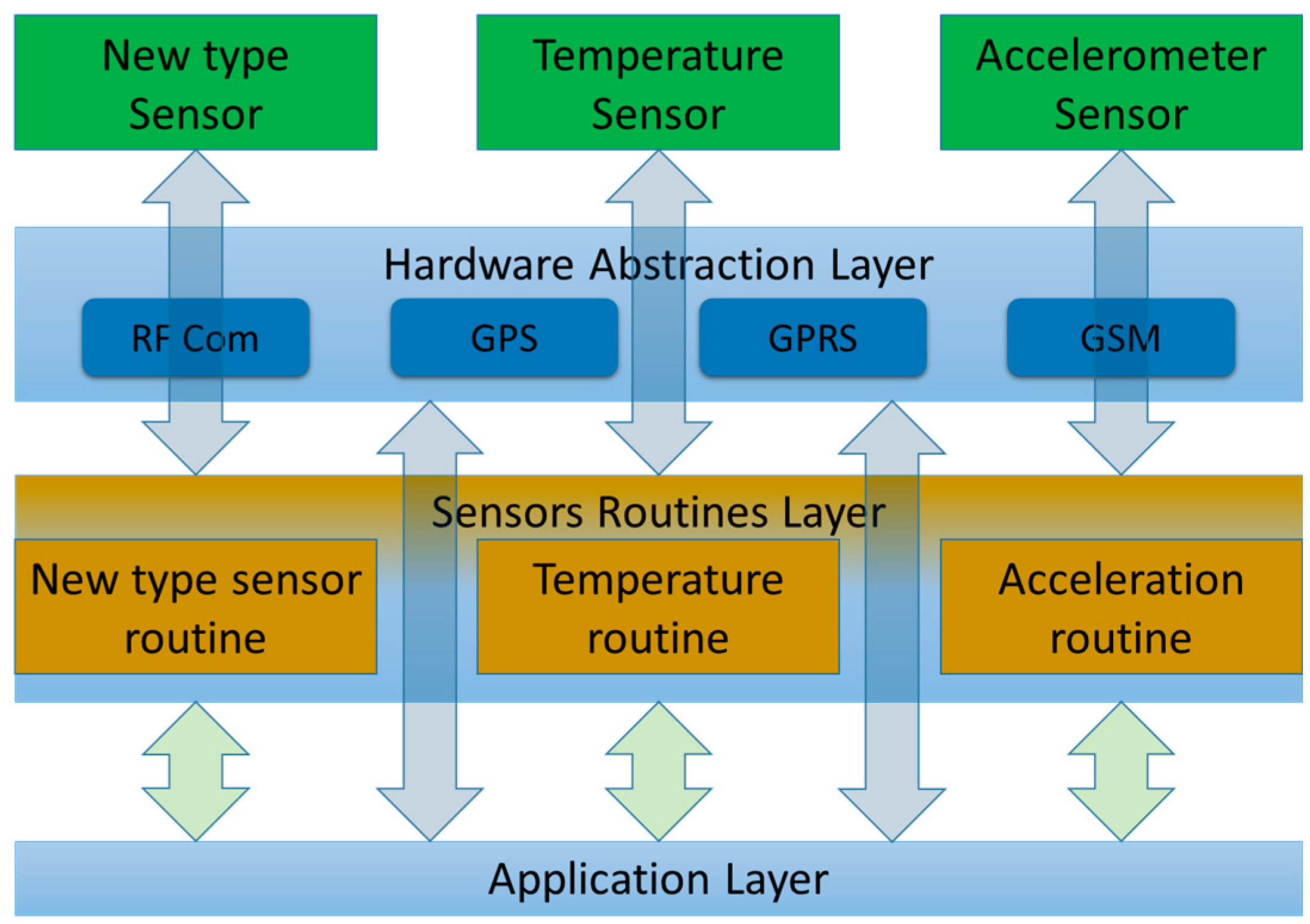
5.3. Software Details
5.4. Programming and Configuring the Device
5.5. Data Reports
6. Experiments and Results
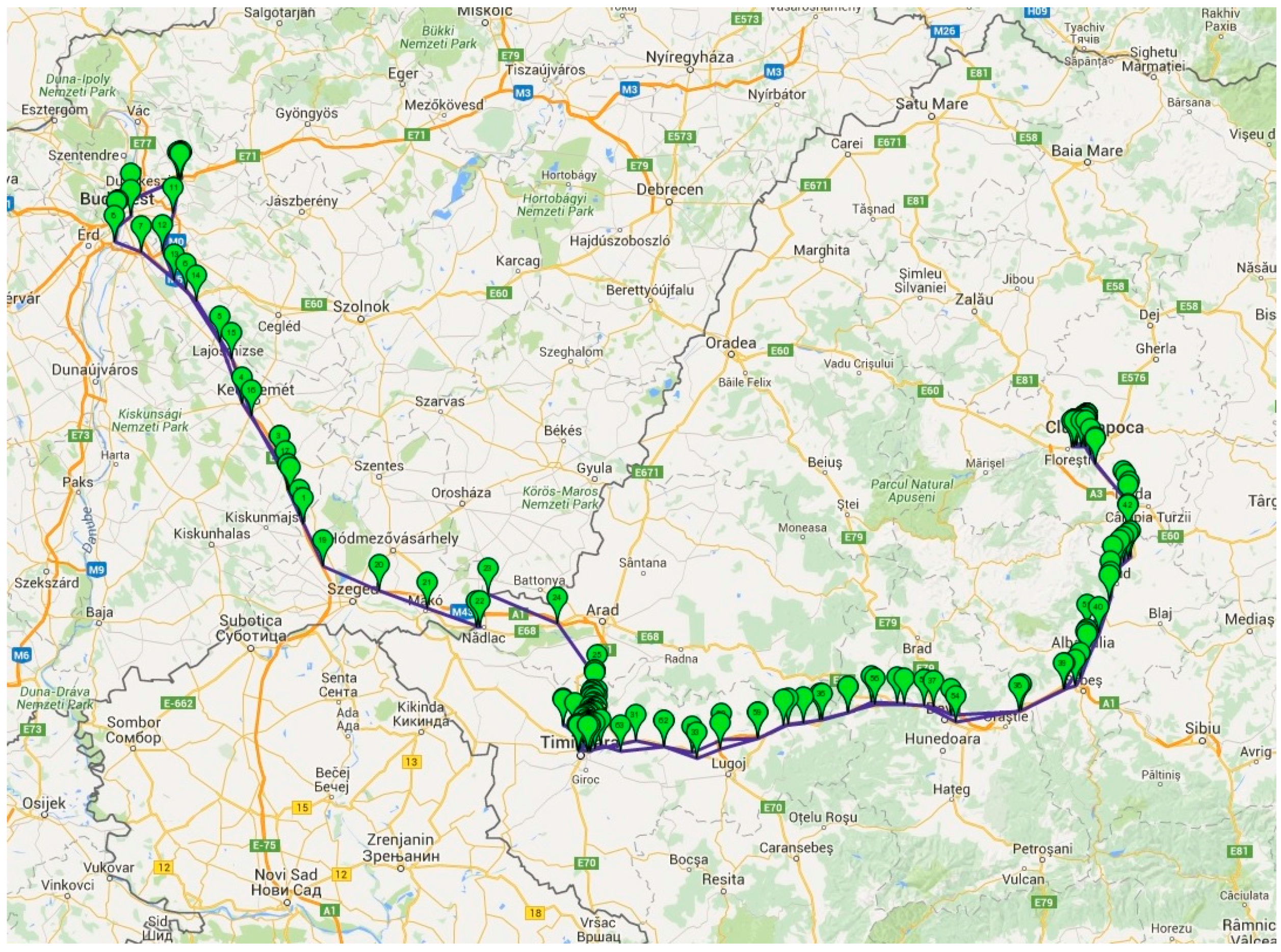
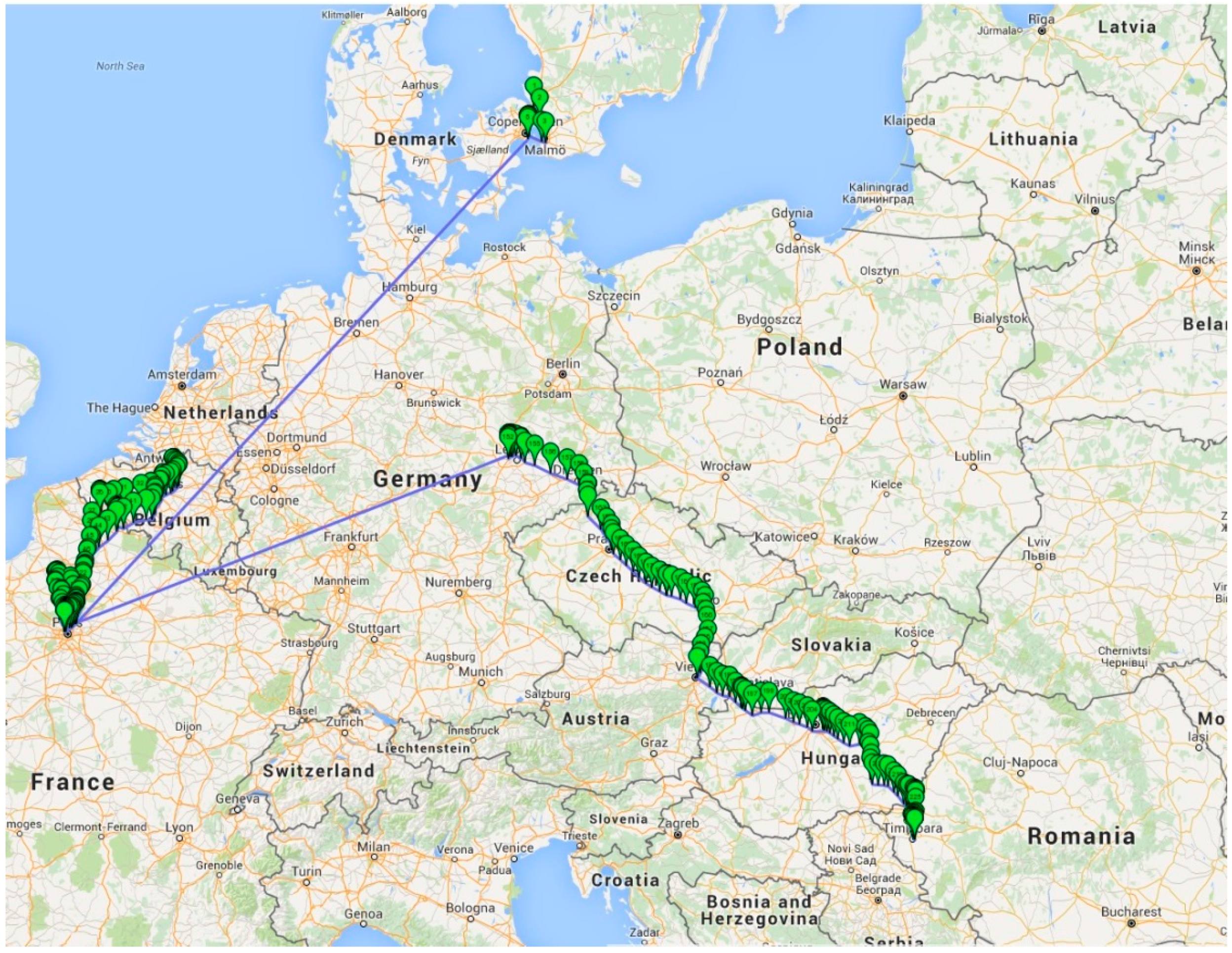
6.1. Communications Tests
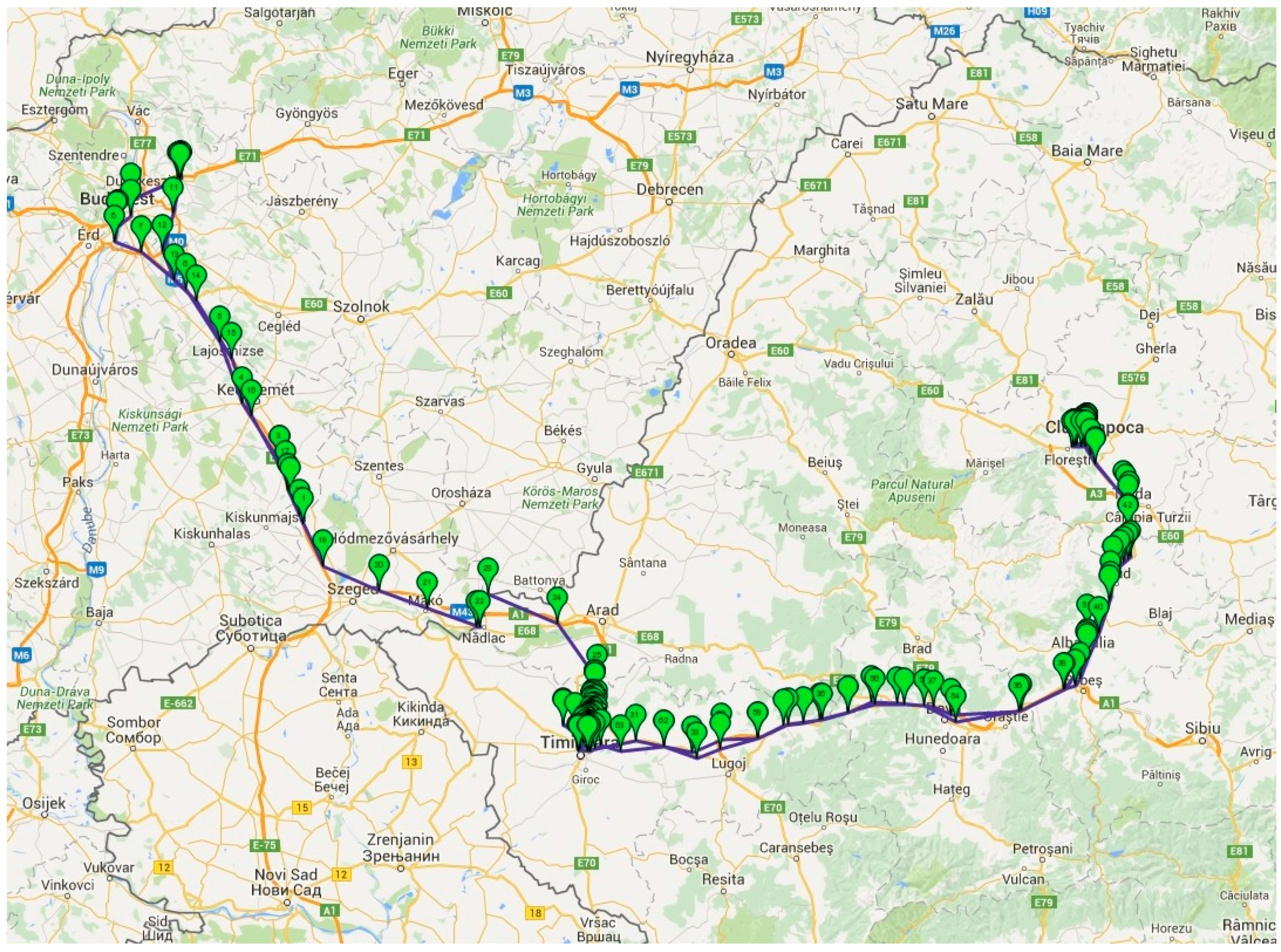
6.1.1. GPS and GSM
6.1.2. Radio
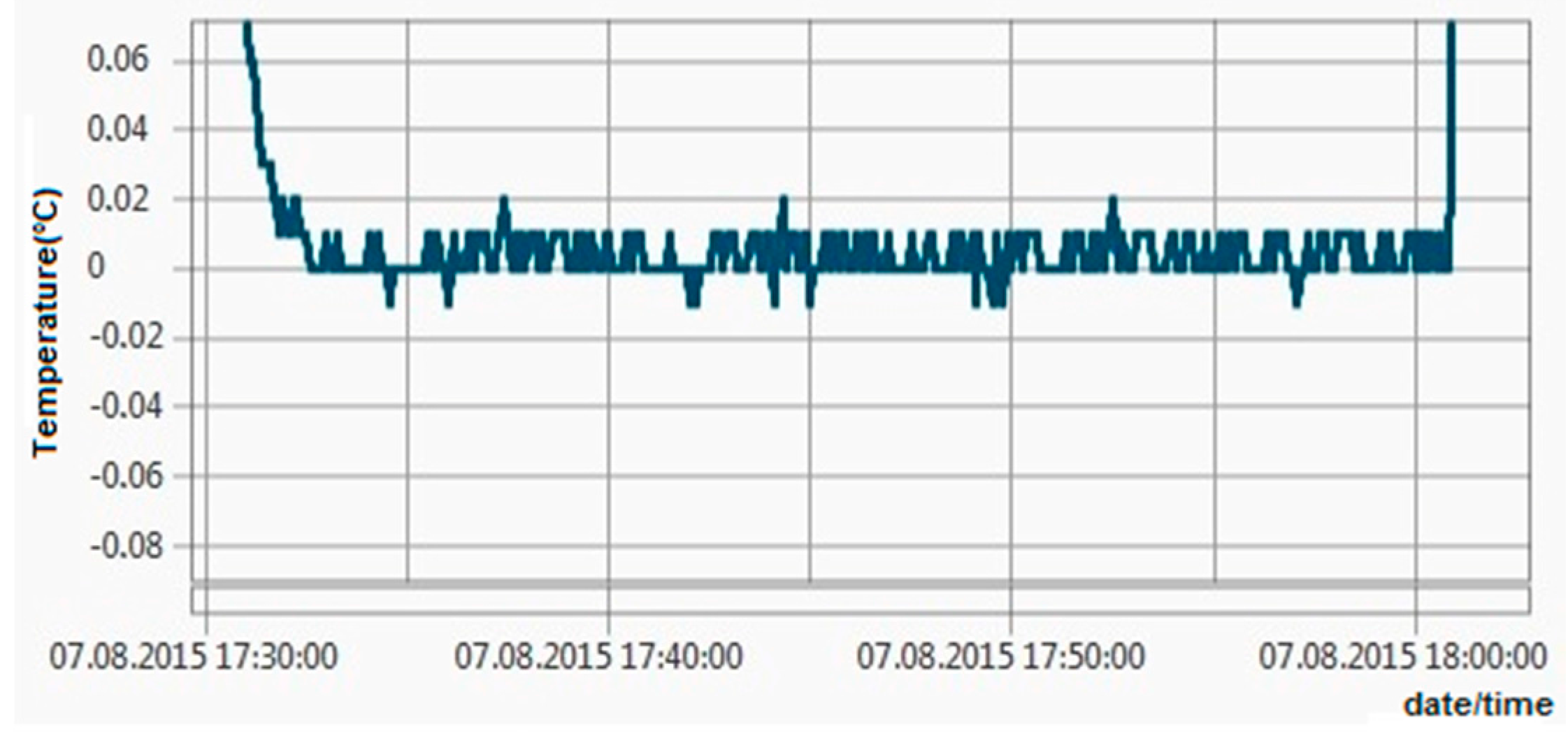
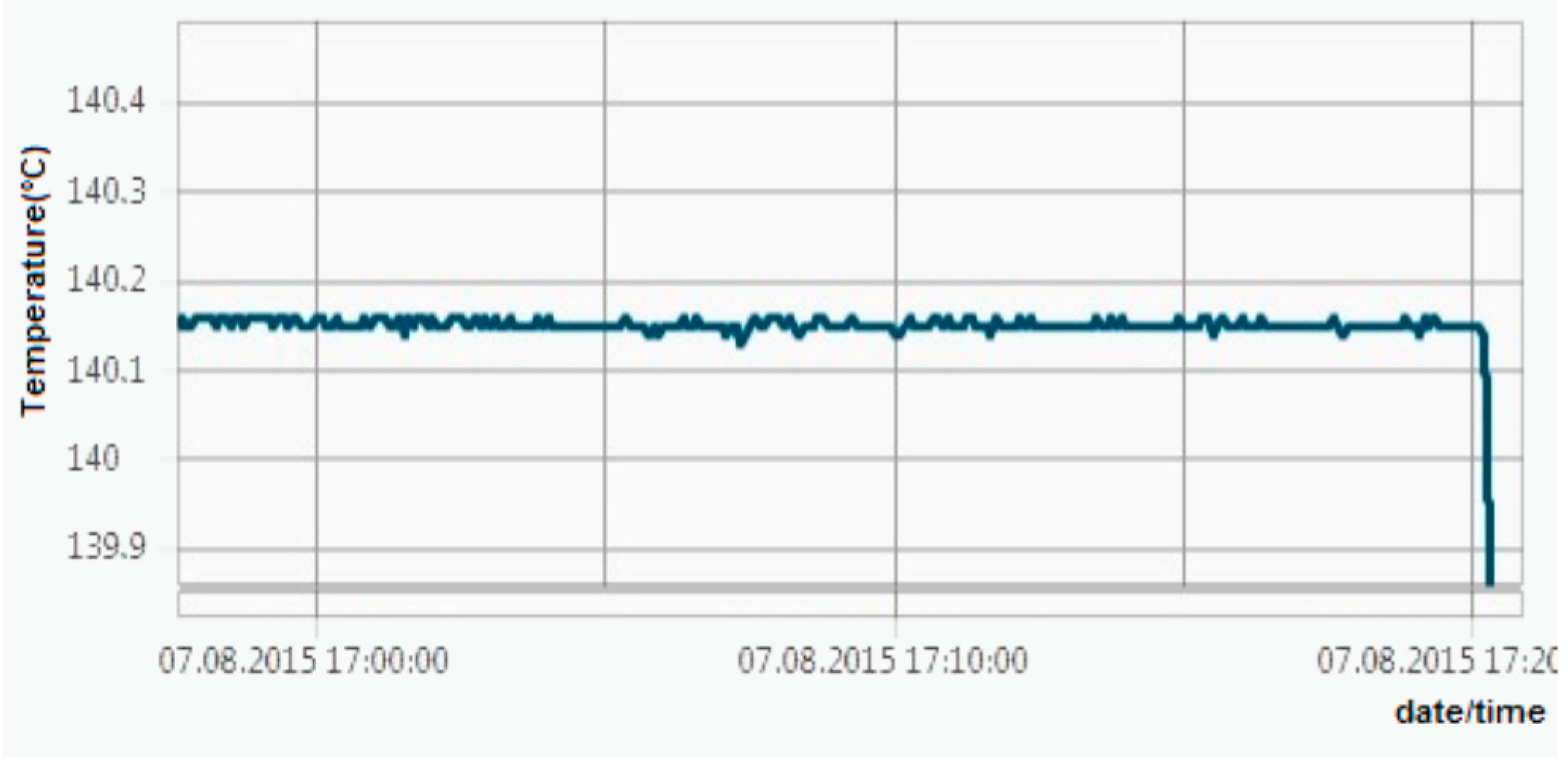
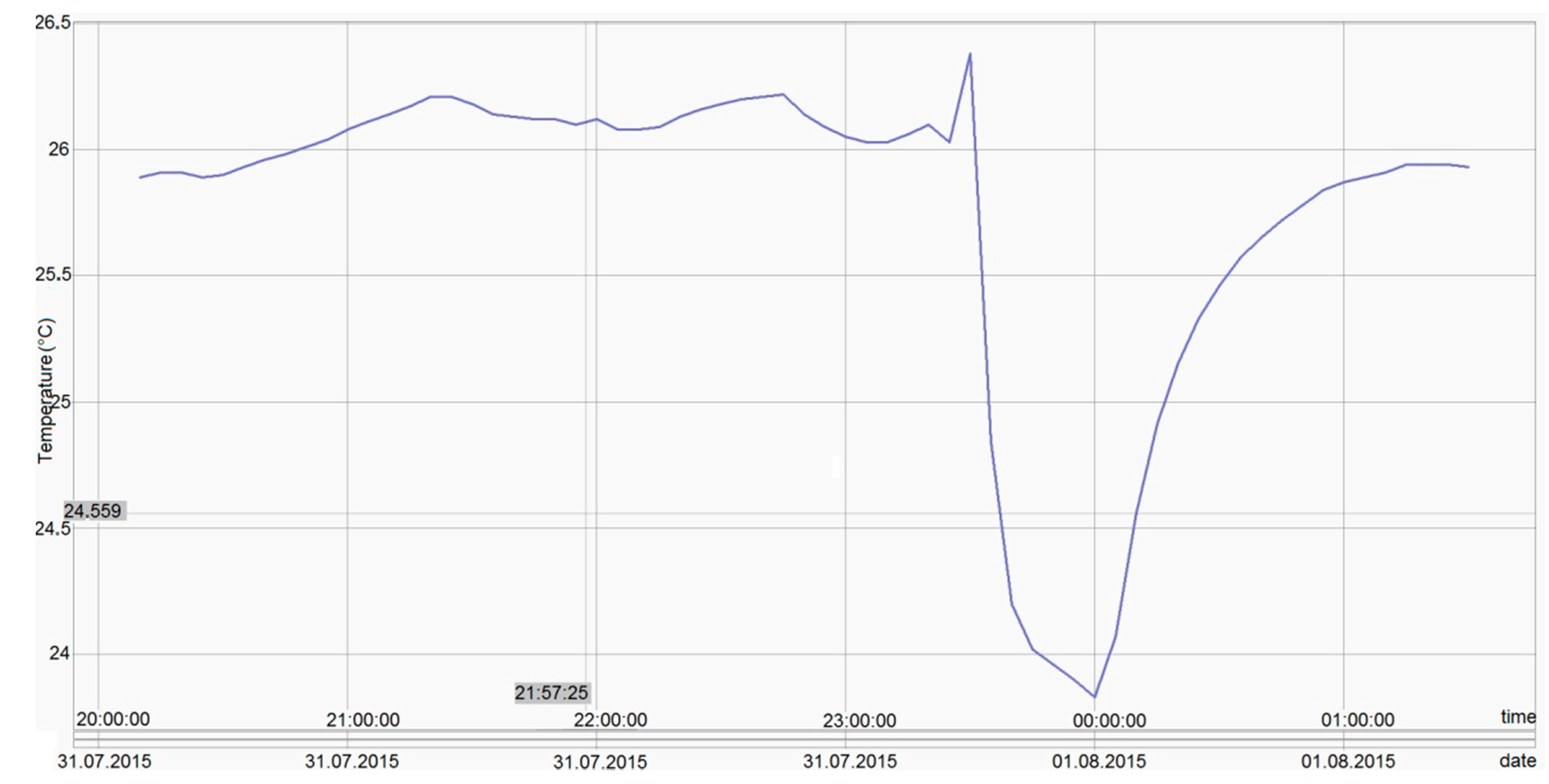
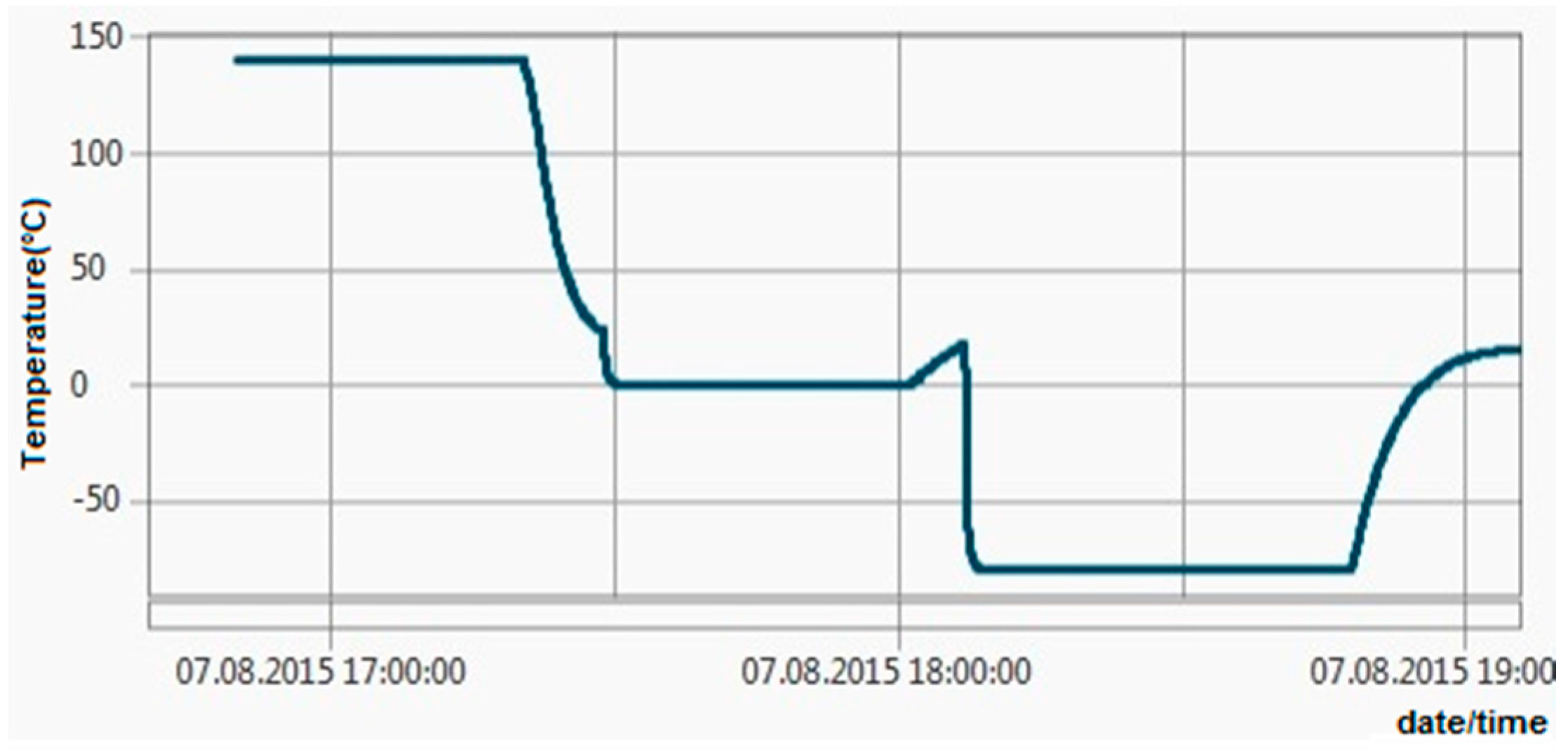
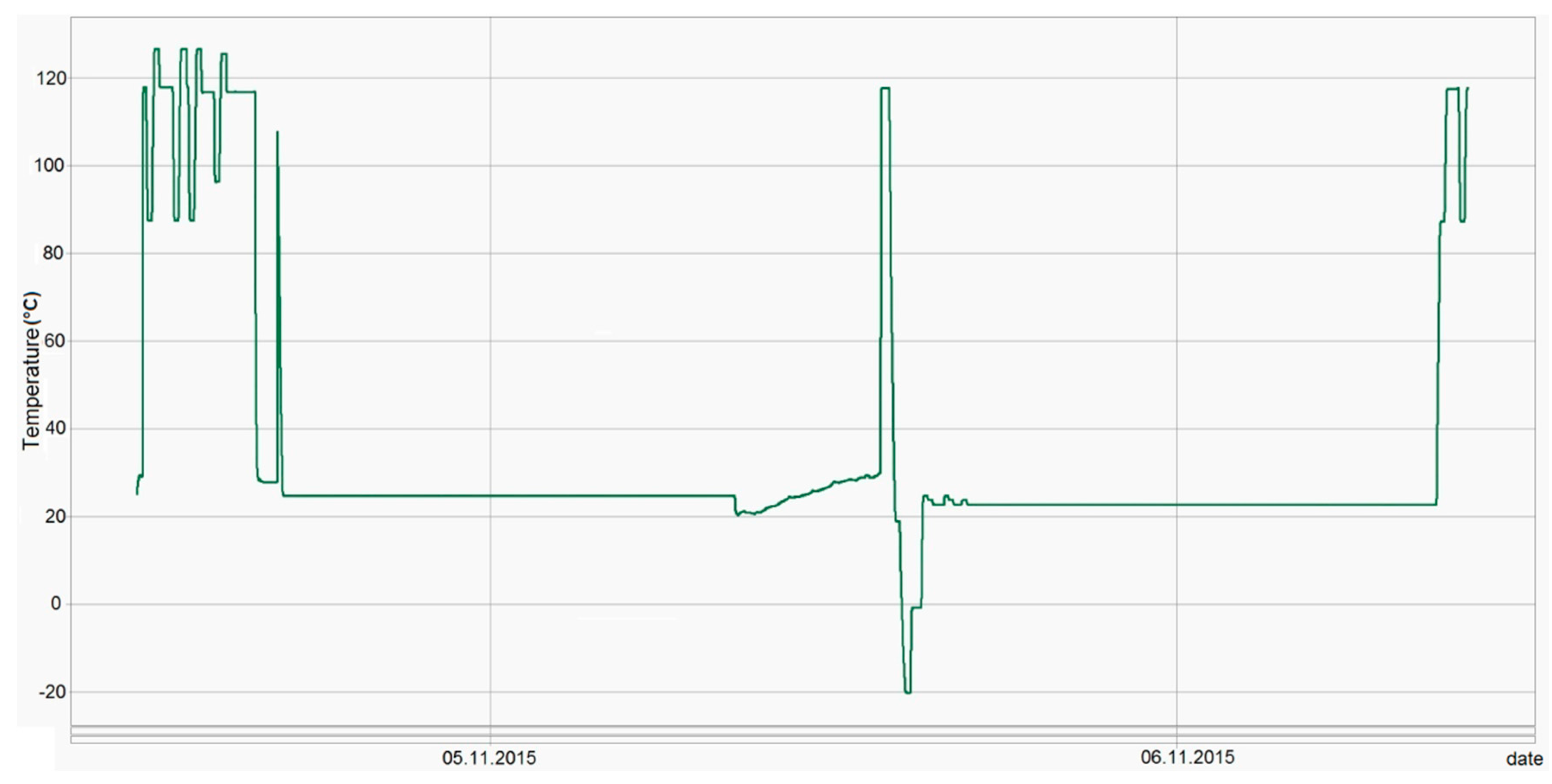
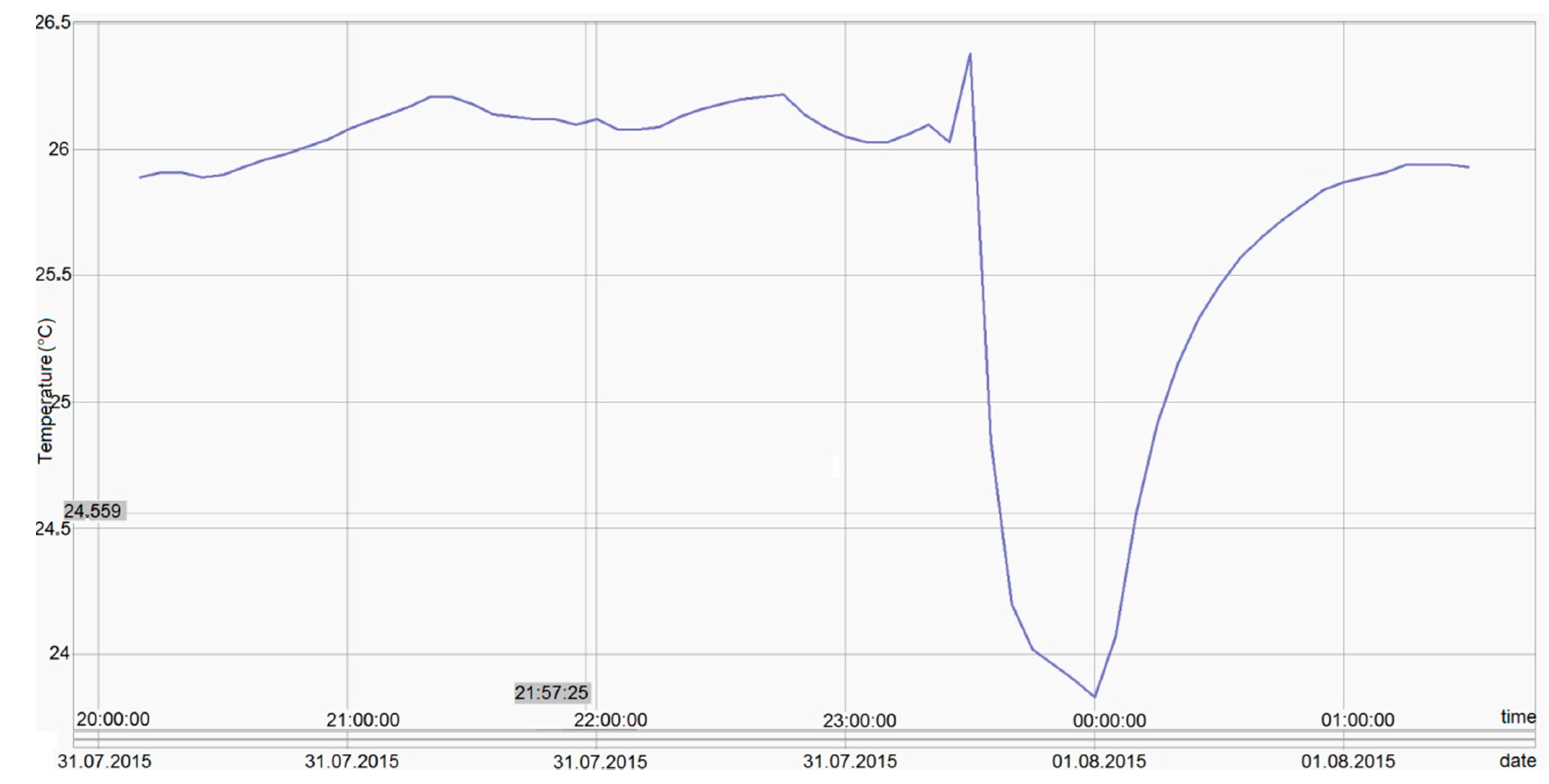
6.2. Temperature Measurements
6.3. Shock
6.4. Power Management
7. Conclusions and Future Works
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ruiz-Garcia, L.; Barreiro, P.; Robla, J.I. Performance of ZigBee-Based Wireless Sensor Nodes for Real-Time Monitoring of Fruit Logistics. J. Food Eng. 2008, 87, 405–415. [Google Scholar] [CrossRef] [Green Version]
- Ruiz-Garcia, L.; Barreiro, P.; Robla, J.I.; Lunadei, L. Testing ZigBee Motes for Monitoring Refrigerated Vegetable Transportation under Real Conditions. Sensors 2010, 10, 4968–4982. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, J.; Wang, H.; He, J.; Li, L.; Shen, M.; Tan, X.; Min, H.; Zheng, L. Wireless sensor network for real-time perishable food supply chain management. Comput. Electron. Agric. 2015, 110, 196–207. [Google Scholar] [CrossRef]
- Lang, W.; Jedermann, R.; Mrugala, D.; Jabbari, A.; Krieg-Brückner, B.; Schill, K. The Intelligent Container-A Cognitive Sensor Network for Transport Management. IEEE Sens. J. 2011, 11, 688–698. [Google Scholar] [CrossRef]
- Crowley, K.; Frisby, J.; Edwards, S.; Murphy, S.; Roantree, M.; Diamond, D. Wireless temperature logging technology for the fishing industry. Proc. IEEE Sens. 2004, 2, 571–574. [Google Scholar]
- Shan, Q.; Liu, Y.; Prosser, G.; Brown, D. Wireless Intelligent Sensor Networks for Refrigerated Vehicle. In Proceedings of the IEEE 6th Circuits and Systems Symposium on Emerging Technologies: Frontiers of Mobile and Wireless Communication, 2004, Shanghai, China, 31 May–2 June 2004; pp. 525–528.
- Sehgal, V.K.; Chauhan, D.S.; Sharma, R. Smart Wireless Temperature Data Logger Using IEEE 802.15.4/ZigBee Protocol. In Proceedings of the TENCON 2008—2008 IEEE Region 10 Conference, Hyderabad, India, 19–21 November 2008; pp. 1–6.
- Wang, N.; Zhang, N.; Wang, M. Wireless sensors in agriculture and food industry-recent development and future perspective. Comput. Electron. Agric. 2006, 50, 1–14. [Google Scholar] [CrossRef]
- Hill, J.L.; Culler, D.E. Mica: A Wireless Platform for Deeply Embedded Networks. IEEE Micro 2002, 22, 12–24. [Google Scholar] [CrossRef]
- PT300 Tracking System. Available online: http://sendum.com/pt300-package-tracker/ (accessed on 1 March 2016).
- SA2000_Sales_Slick. Available online: http://www.senseaware.com/wp-content/uploads/SA2000_Sales_Slick.pdf (accessed on 1 March 2016).
- Locus Traxx Lux. Available online: http://www.locustraxx.com/media/2015/04/Lux-Spec-Sheet-7.23.15.pdf (accessed on 2 March 2016).
- Kylos—Tracking of Any Merchandise. Available online: http://www.advanced-tracking.com/kylos-tracking-of-any-merchandise-c2x13920875 (accessed on 2 March 2016).
- ShockpodLive. Available online: http://www.shockpodlive.com/ (accessed on 3 March 2016).
- Vancea, C.M.; Viman, L. Wireless data logger for thermal validation systems. In Proceedings of the 17th International Symposium for Design and Technology of Electronic Packages, Timisoara, Romania, 20–23 October 2011; pp. 295–298.
- A True System-on-Chip Solution for 2.4-GHz IEEE 802.15.4 and ZigBee Applications. Available online: http://www.ti.com/lit/ds/symlink/cc2530.pdf (accessed on 8 May 2015).
- Andersen, A. Small Size 2.4 GHz PCB Antenna. Application Note AN0043. Available online: http://www.ti.com/lit/an/swra117d/swra117d.pdf (accessed on 4 May 2015).
- GE910 Hardware User Guide. Available online: http://www.roundsolutions.com/techdocs/DOCS_TELIT/GE910_Hardware_User_Guide_r14.pdf (accessed on 15 June 2015).
- Telit Modules Software User Guide. Available online: http://www.roundsolutions.com/techdocs/DOCS_TELIT/Modules_Software_User_Guide_r16.pdf (accessed on 15 May 2015).
- AT Commands Reference Guide. Available online: http://www.roundsolutions.com/techdocs/DOCS_TELIT/AT_Commands_Reference_Guide_r21.pdf (accessed on 22 June 2015).
- Analog Devices, AD7794 Datasheet. Available online: http://www.analog.com/en/analog-to-digital-converters/ad-converters/ad7794/products/product.html (accessed on 11 May 2015).
- The International Temperature Scale of 1990 (ITS-90). Procès-Verbaux du Comité International des Poids et Mesures. 78th Meeting. 1989. Available online: http://www.omega.com/temperature/Z/pdf/z186–193.pdf (accessed on 8 June 2015).
- Coca, E.; Popa, V. Antenna Radiation Pattern Influence on the Localization Accuracy in Wireless Sensor Networks. Adv. Electr. Comput. Eng. 2013, 13, 43–46. [Google Scholar] [CrossRef]
- Sungwon, Y.; Hojung, C. An Empirical Study of Antenna Characteristics toward RF-Based Localization for IEEE 802.15.4 Sensor Nodes. In Wireless Sensor Networks; Springer Berlin Heidelberg: Heidelberg, Germany, 2007; pp. 309–324. [Google Scholar]
- Bayon, R.M.; Suarez, V.M.G.; Martin, F.M.; Ronda, J.M.L.; Anton, J.C.A. A Wireless Portable High Temperature Data Monitor for Tunnel Ovens. Sensors 2014, 14, 14712–14731. [Google Scholar] [CrossRef] [PubMed]
- Roundy, S.; Steingart, D.; Frechette, L.; Wright, P.K.; Rabaey, J.M. Power Sources for Wireless Sensor Networks. In Wireless Sensor Networks; Springer-Verlag: Berlin, Germany, 2004; Volume 2920, pp. 1–17. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | Temperature | Shock |
|---|---|---|
| Sensor type | 4 wires PT100 | acceleration |
| flexible | PTFE 19“ (480 mm) | |
| customized | Up to 39“ (1000 mm) | |
| Range | −30 °C to +80 °C | |
| (−200 °C to +200 °C sensor only) | ||
| Accuracy | ±0.1 °C | |
| Sensitivity | ±0.01 °C | 10 levels (shock/free fall) |
| Characteristics | Details |
|---|---|
| Weight | 850 g battery included |
| Antennas Battery | internal 2 lithium batteries |
| Battery lifetime | Up to 3 month—based on user (client) usage |
| Size | 90 mm × 90 mm × 100 mm |
| Sampling rate | 2 s to 24 h |
| Logger update rate | 300 s to 24 h—user configurable |
| Memory capacity | 128.000 data points |
| Internal clock drift | 4 s/24 h @ +23 °C |
| Calibrations | Factory: Traceable NIST/COFRAC—IST-90 coefficient reside in internal memory |
| User: Close loop calibration, on user site, using provided software for devices |
| Length | Device Type | Address | Cmd. | Param. | CRC | End |
|---|---|---|---|---|---|---|
| 1 byte | 1 byte | 2 bytes | 2 bytes | 0…n byte(s) | 2 bytes | 1 byte |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Viman, L.; Daraban, M.; Fizesan, R.; Iuonas, M. XpertTrack: Precision Autonomous Measuring Device Developed for Real Time Shipments Tracker. Sensors 2016, 16, 355. https://doi.org/10.3390/s16030355
Viman L, Daraban M, Fizesan R, Iuonas M. XpertTrack: Precision Autonomous Measuring Device Developed for Real Time Shipments Tracker. Sensors. 2016; 16(3):355. https://doi.org/10.3390/s16030355
Chicago/Turabian StyleViman, Liviu, Mihai Daraban, Raul Fizesan, and Mircea Iuonas. 2016. "XpertTrack: Precision Autonomous Measuring Device Developed for Real Time Shipments Tracker" Sensors 16, no. 3: 355. https://doi.org/10.3390/s16030355