
Distributed Long-Gauge Optical Fiber Sensors Based Self-Sensing FRP Bar for Concrete Structure

Abstract
:1. Introduction
2. BOTDA-Based Distributed OF Sensing Principle
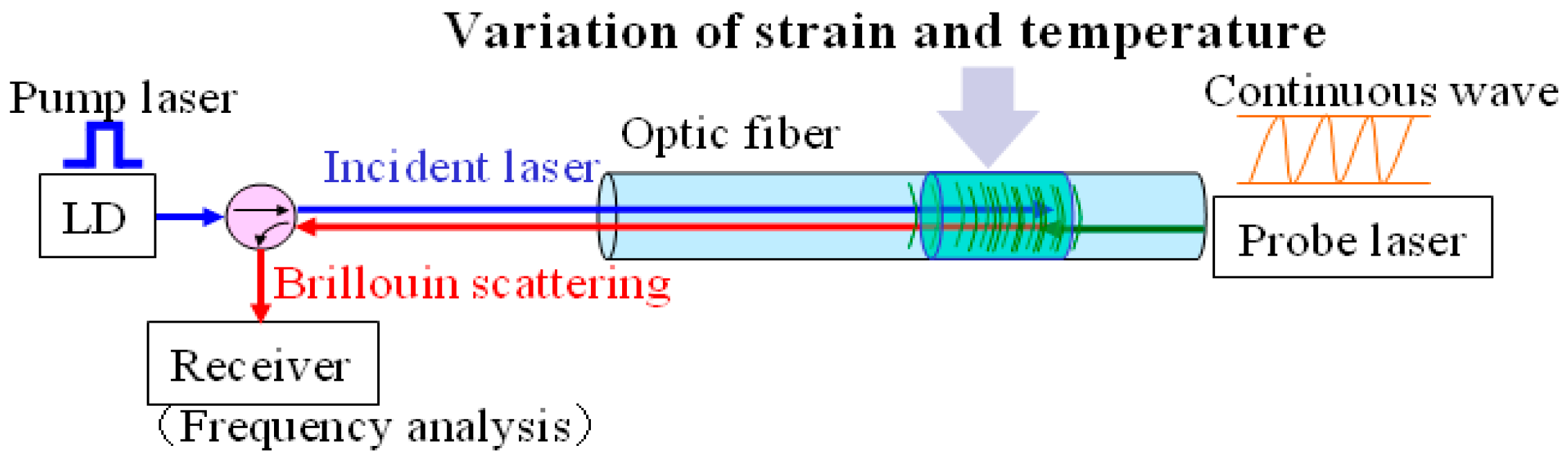
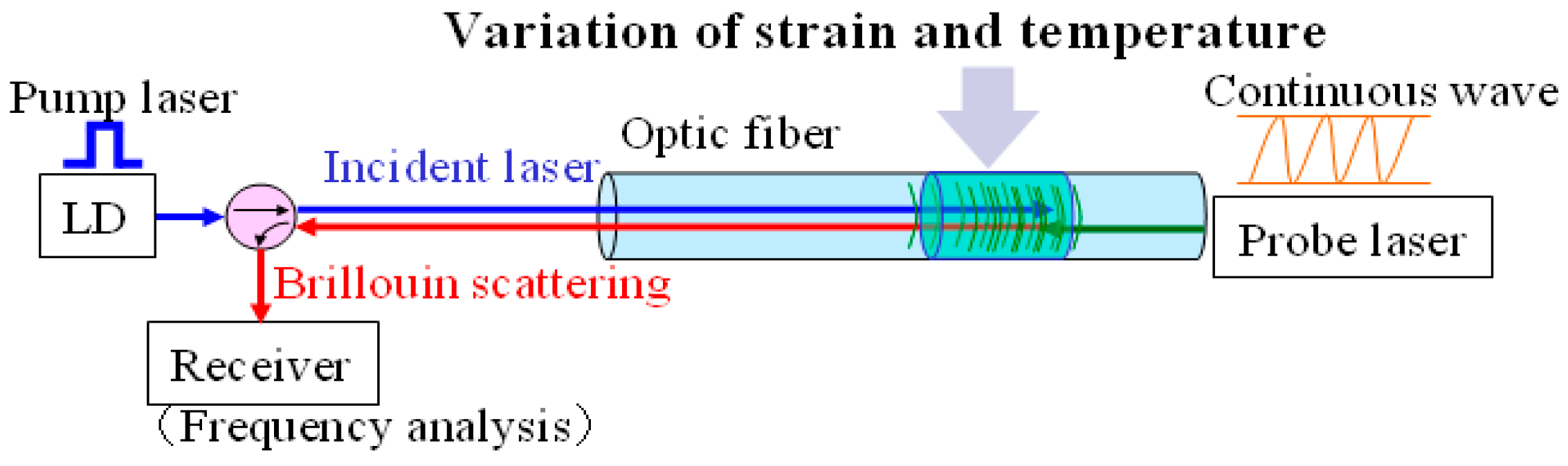
2.1. Measurement Principle of BOTDA
2.2. Spatial Resolution
3. BOTDA Based Distributed Long-Gauge OF Sensor
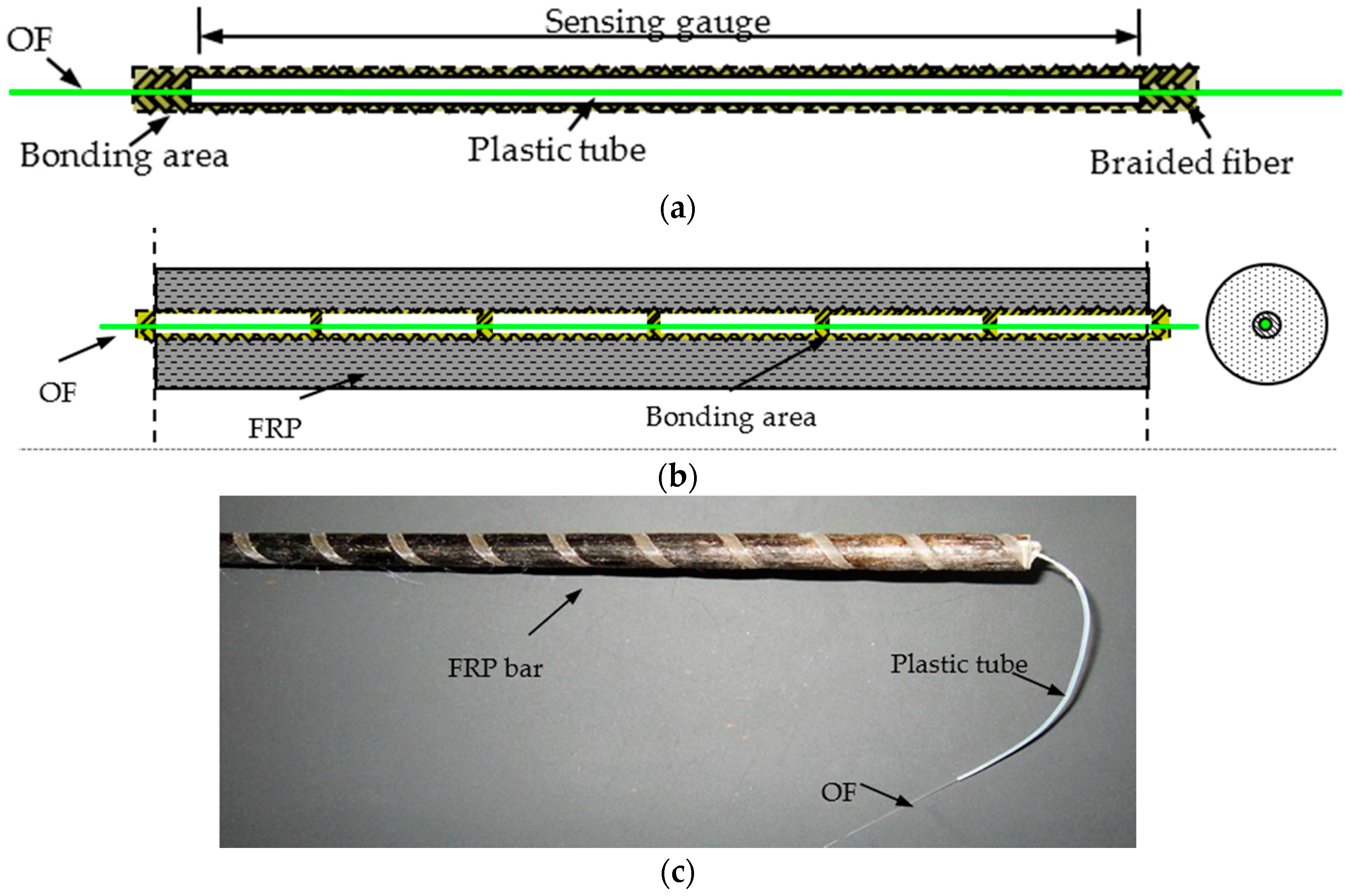
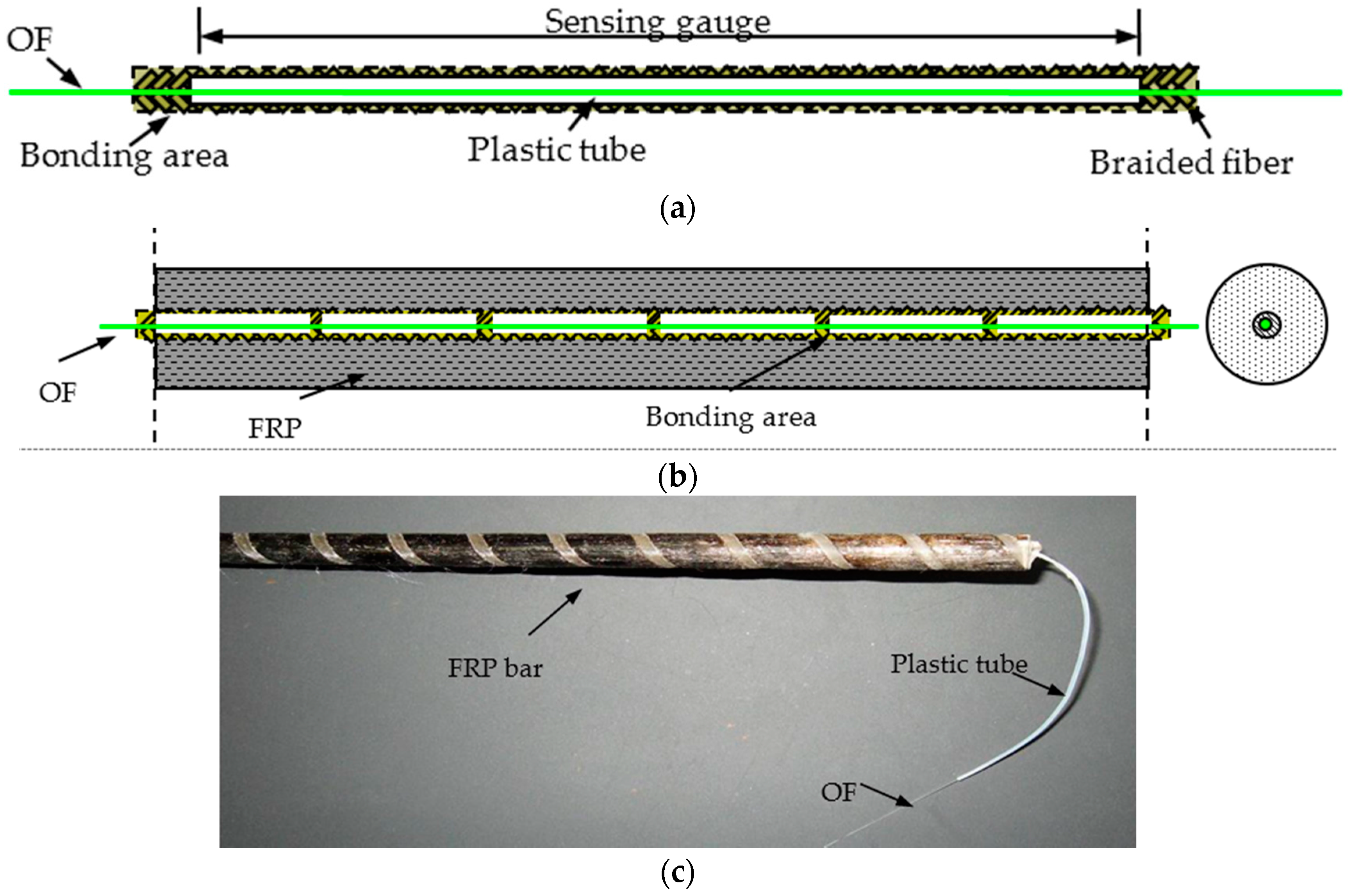
3.1. Long-Gauge OF Sensor
3.2. Key Sensor Parameters
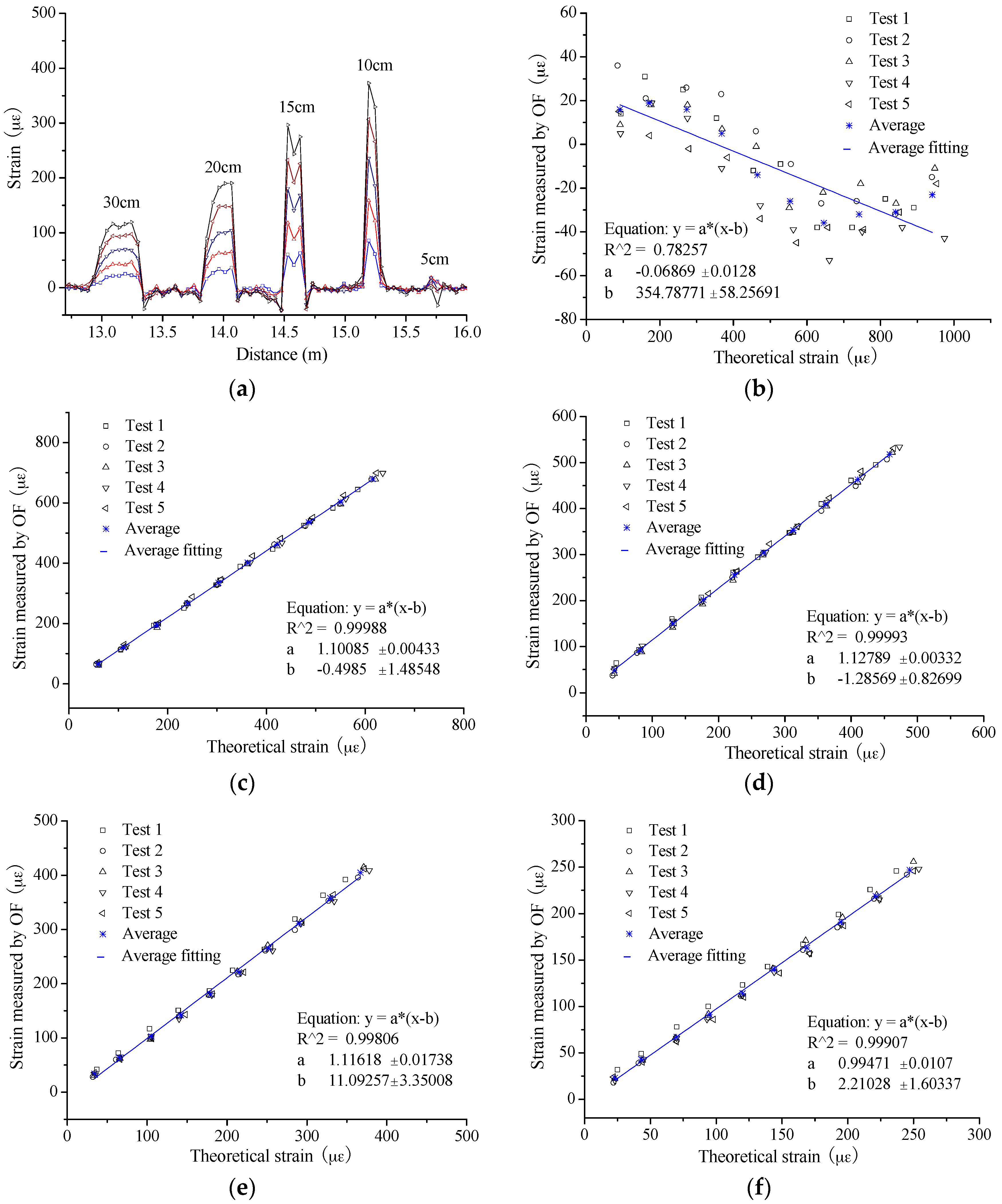
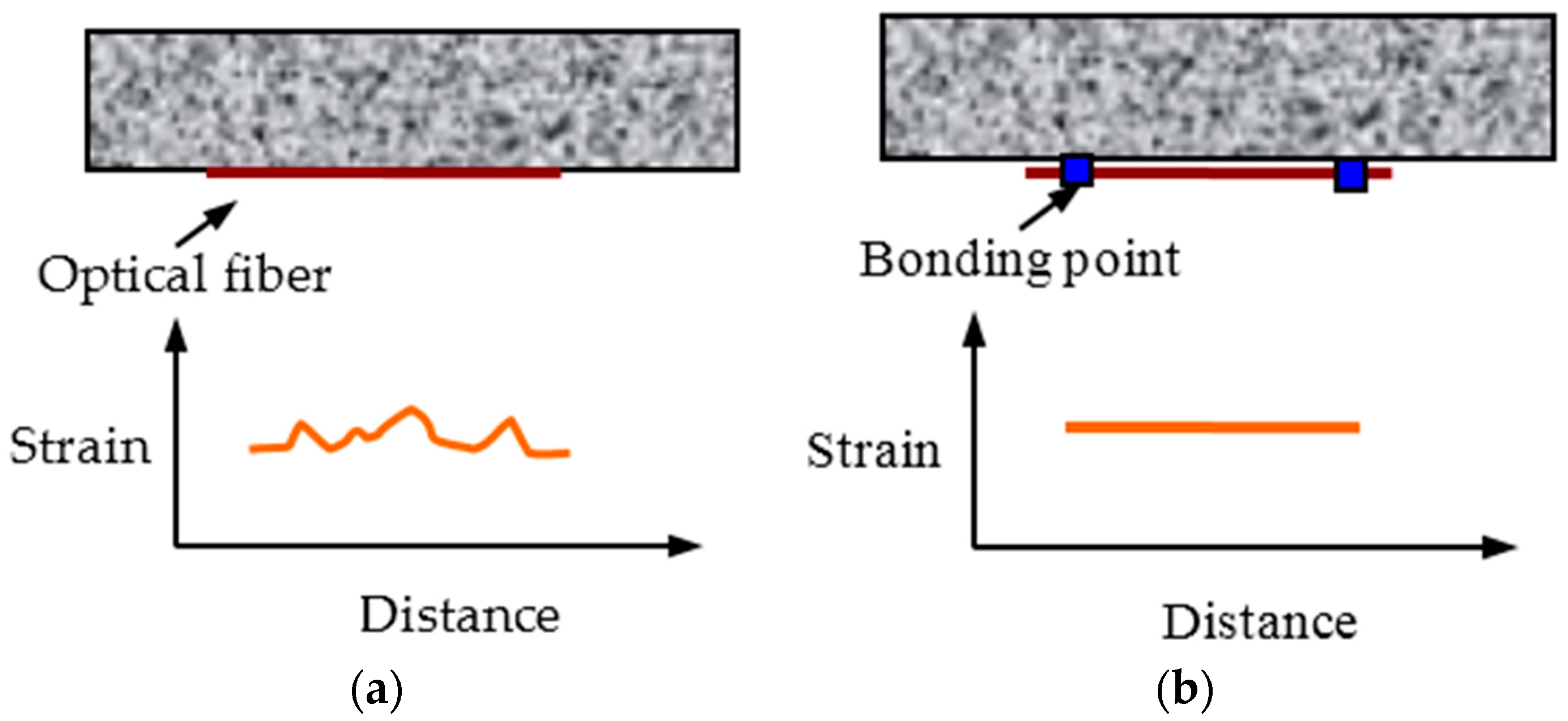
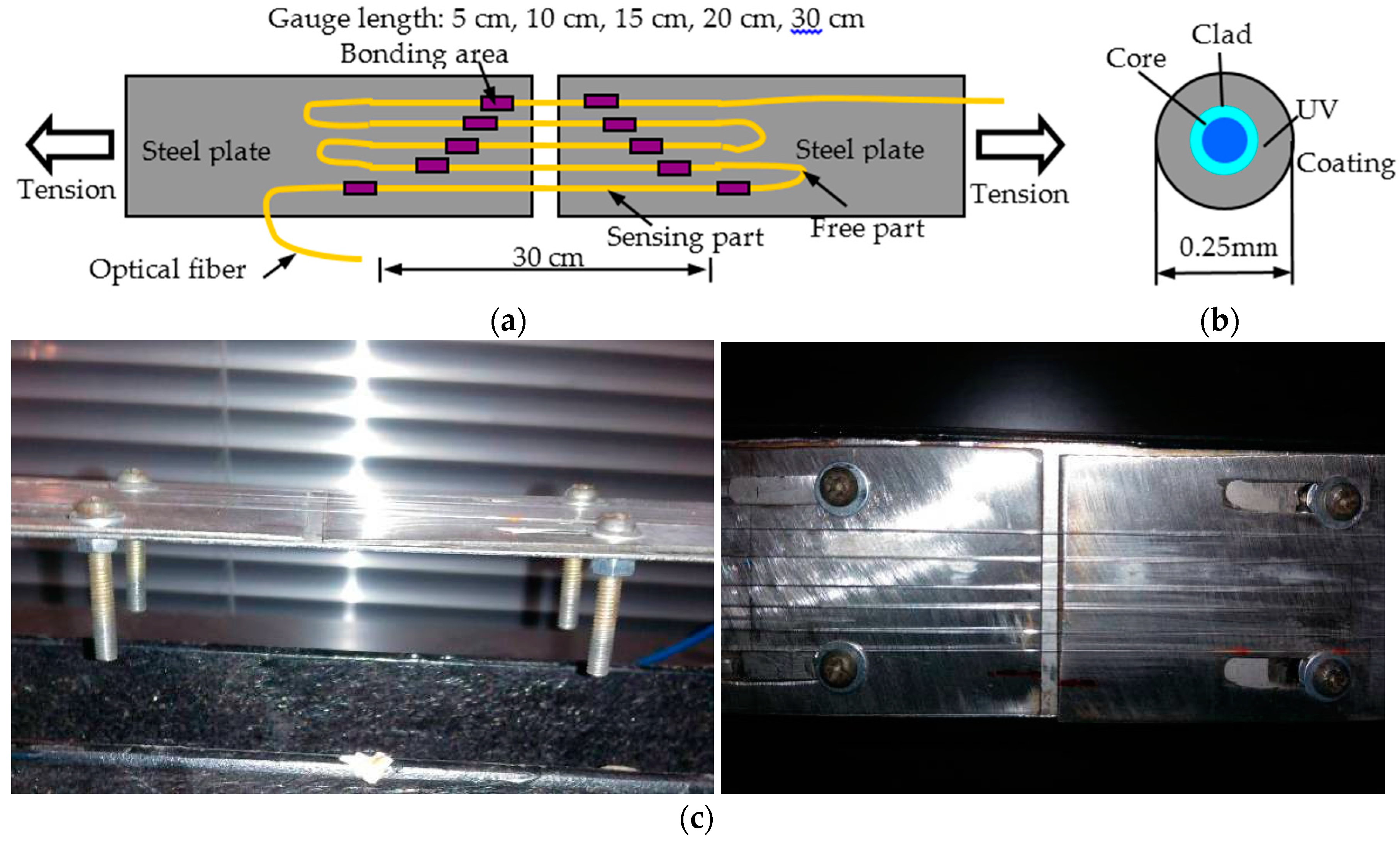
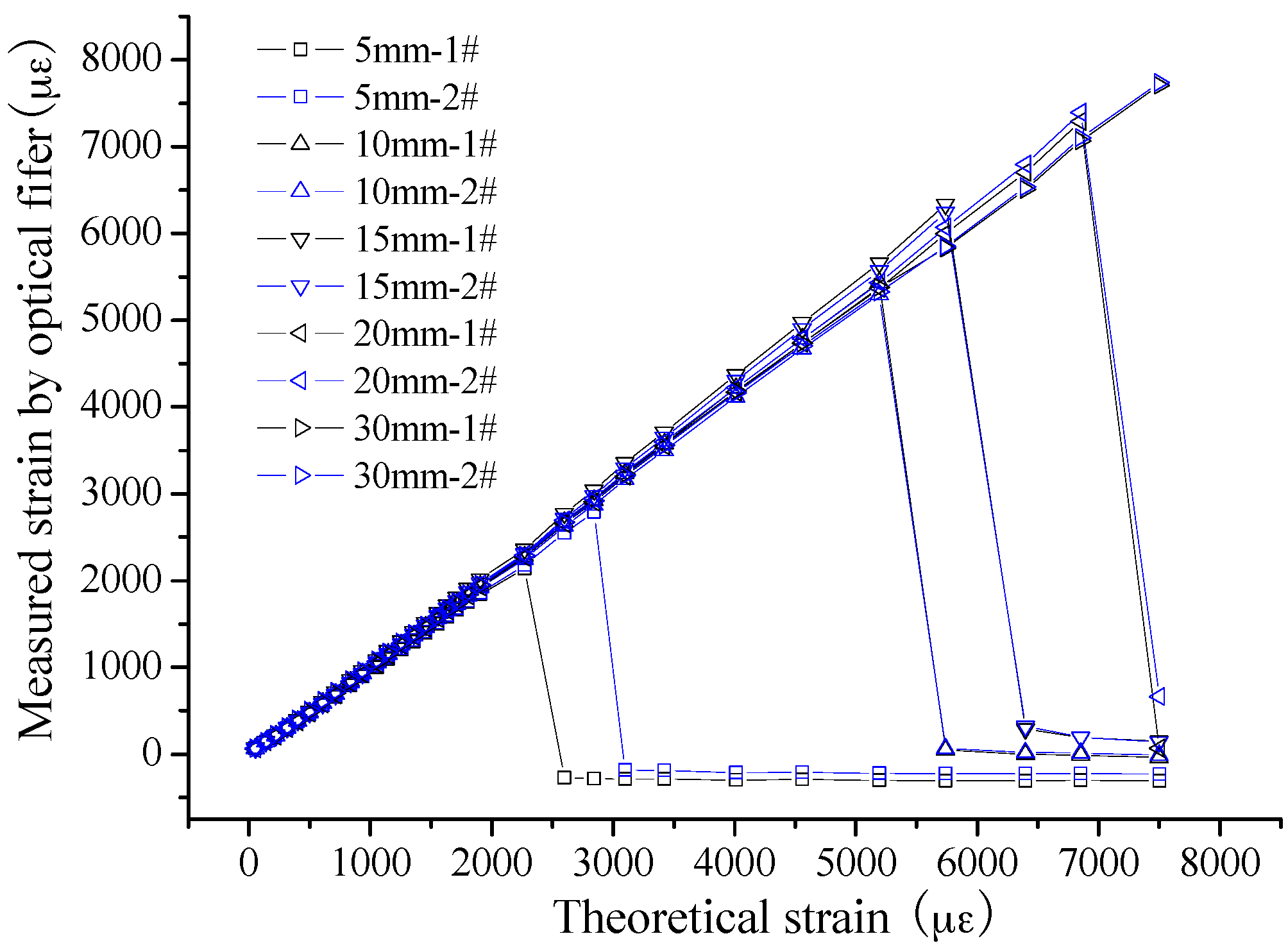
3.2.1. Gauge Length
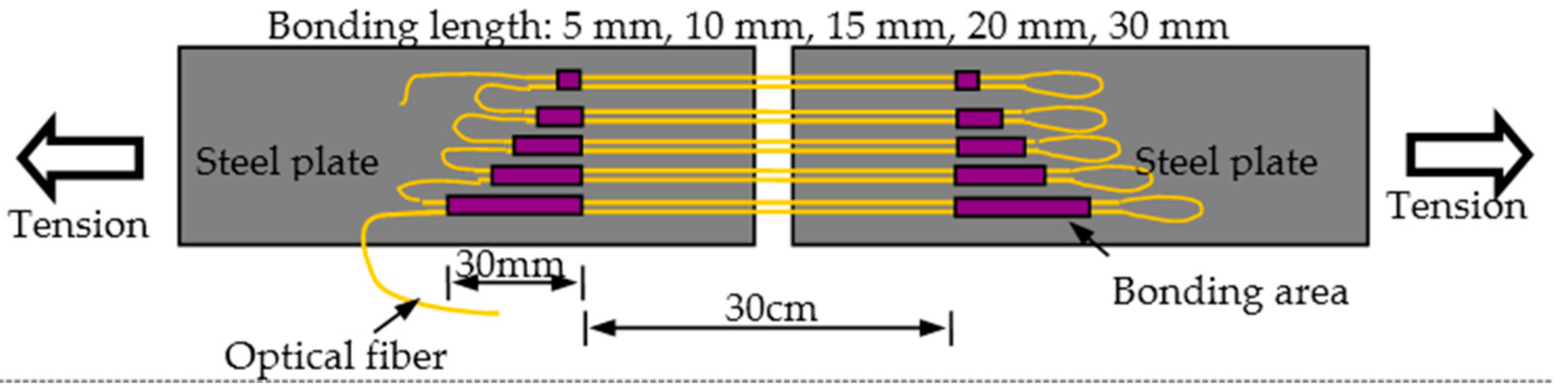
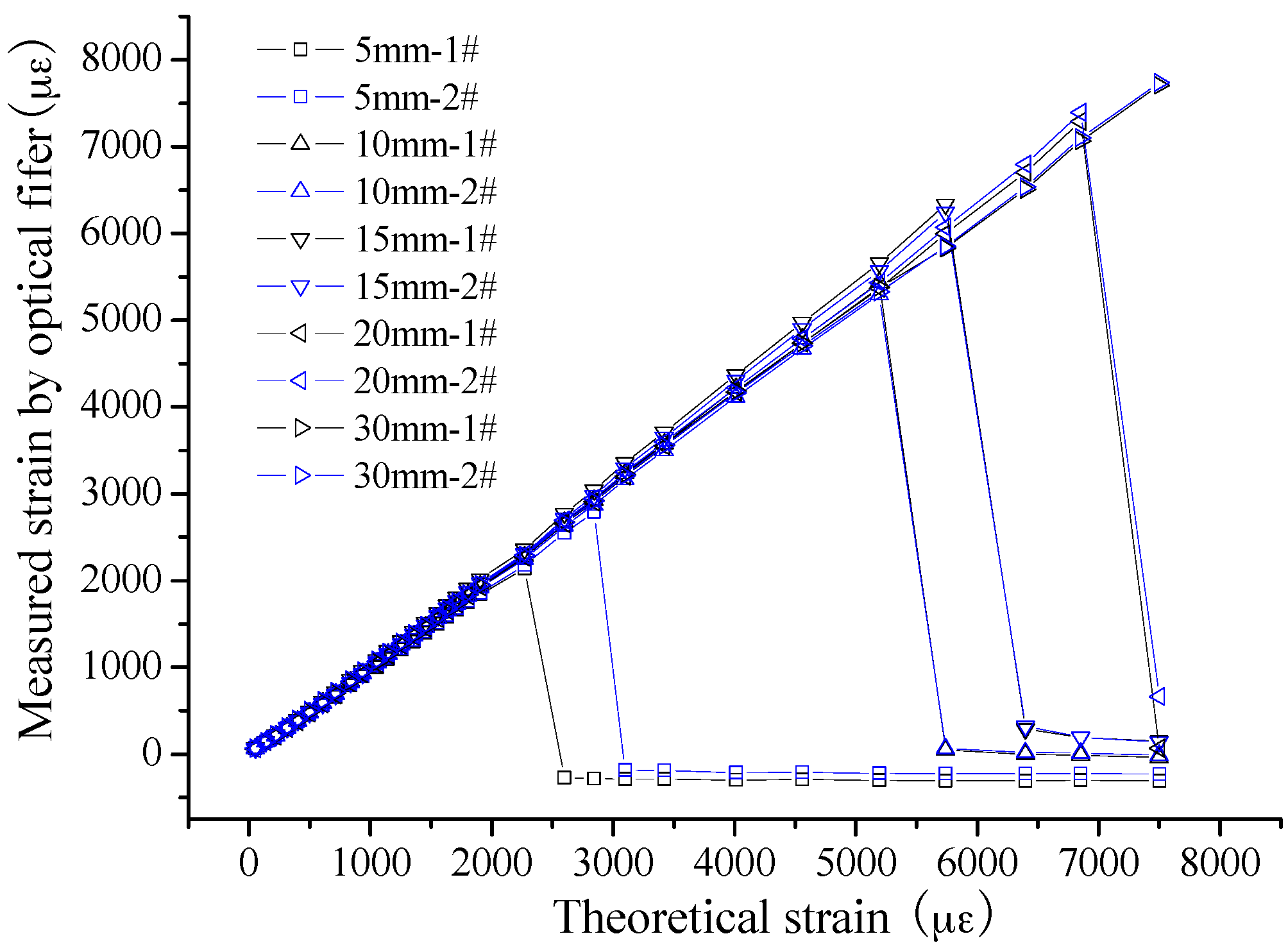
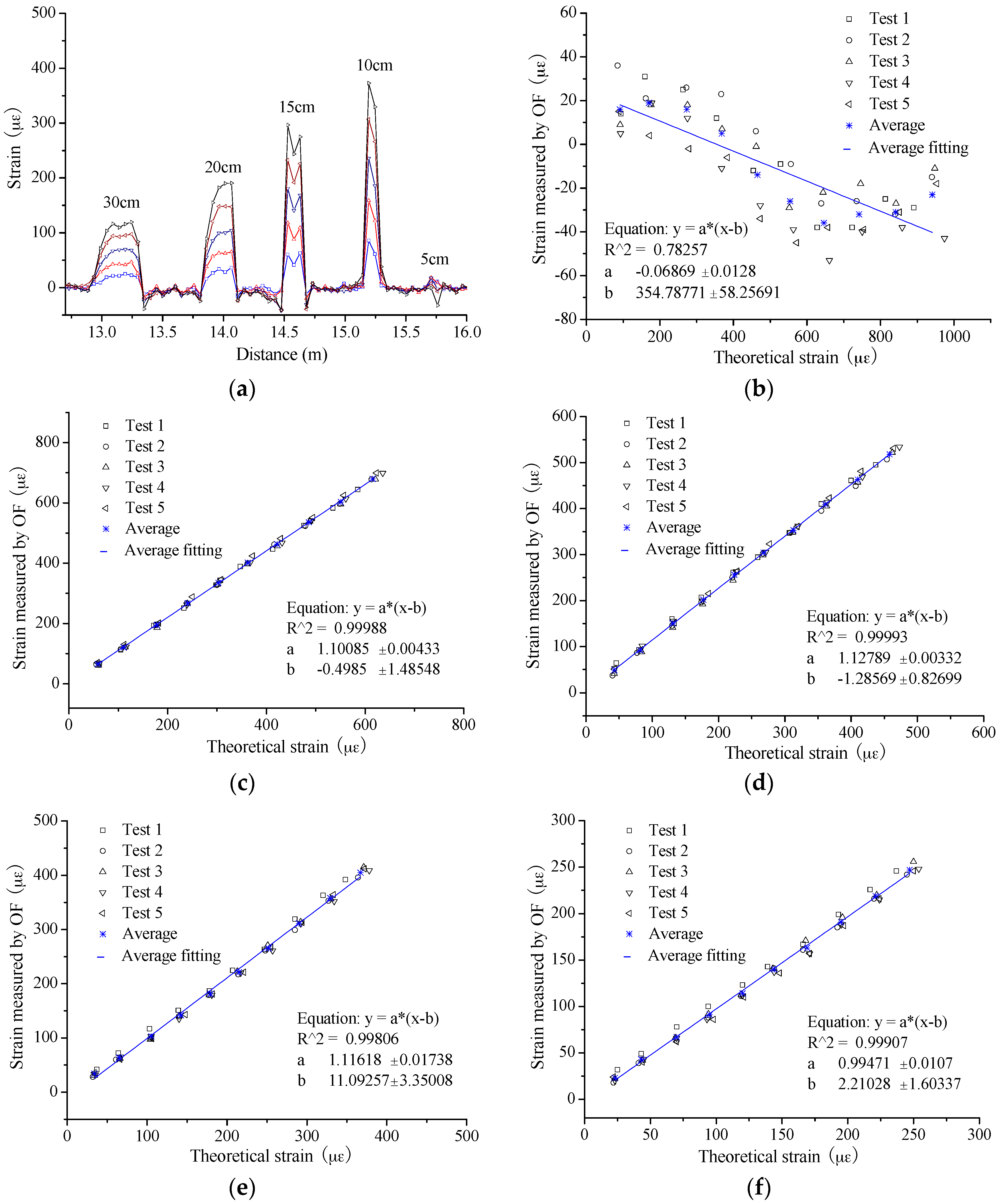
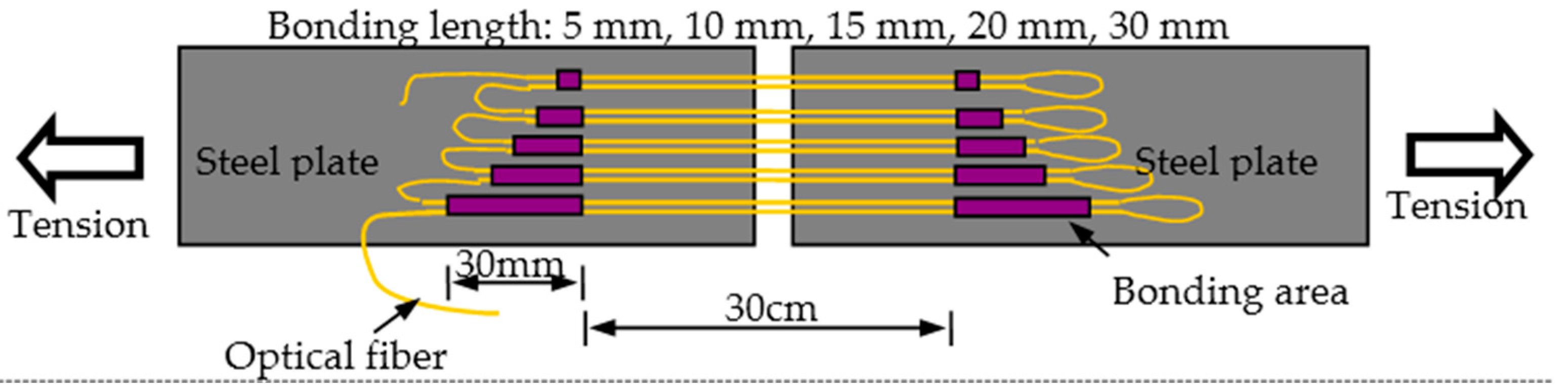
3.2.2. Bonding Length
4. Fabrication of Self-Sensing FRP Bar with Improved Distributed OF Sensor
5. Properties of Self-Sensing FRP Bar
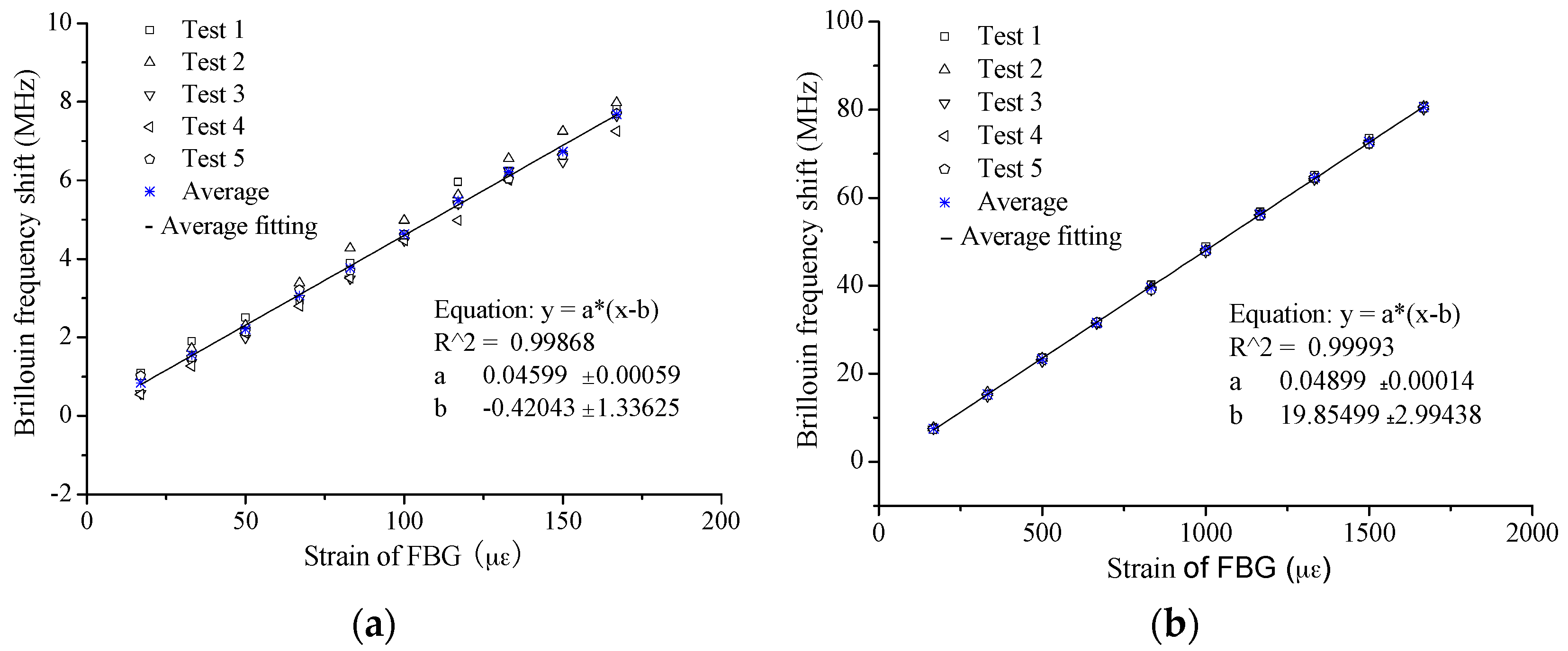
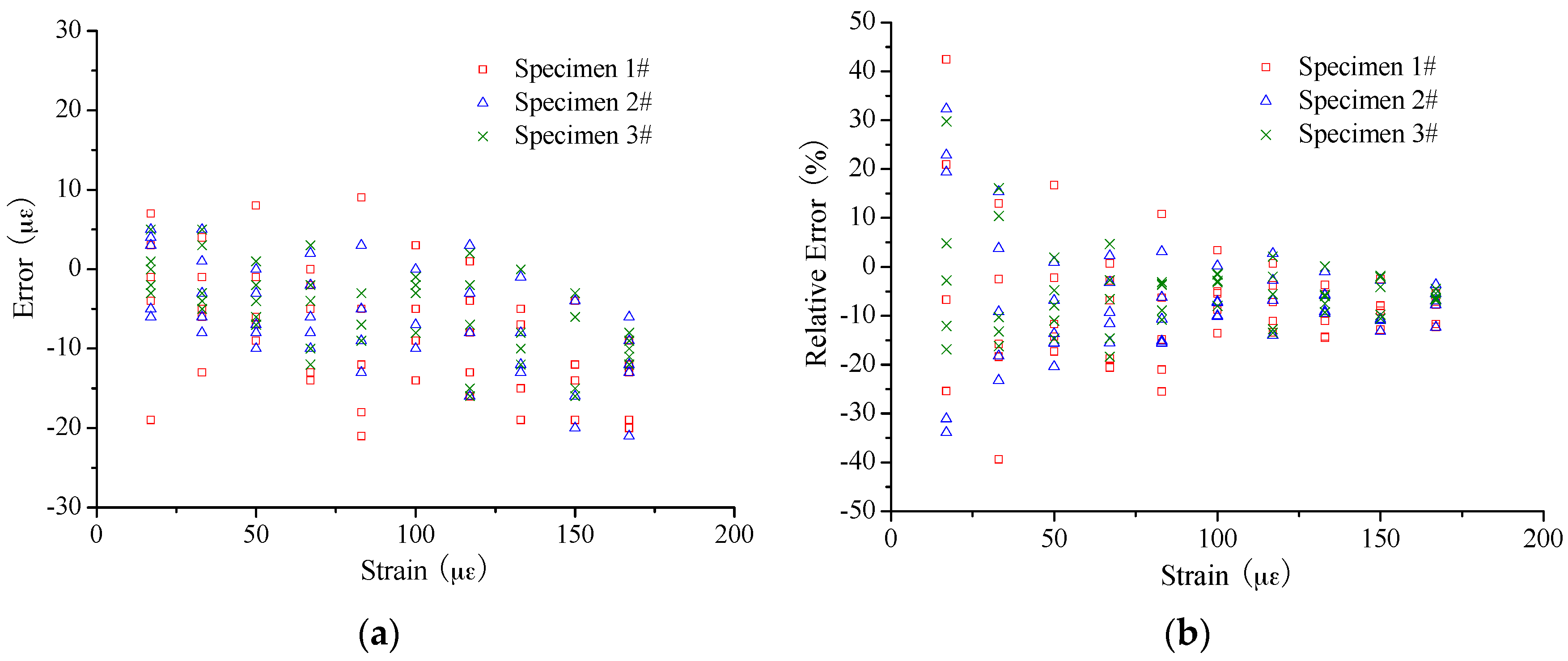
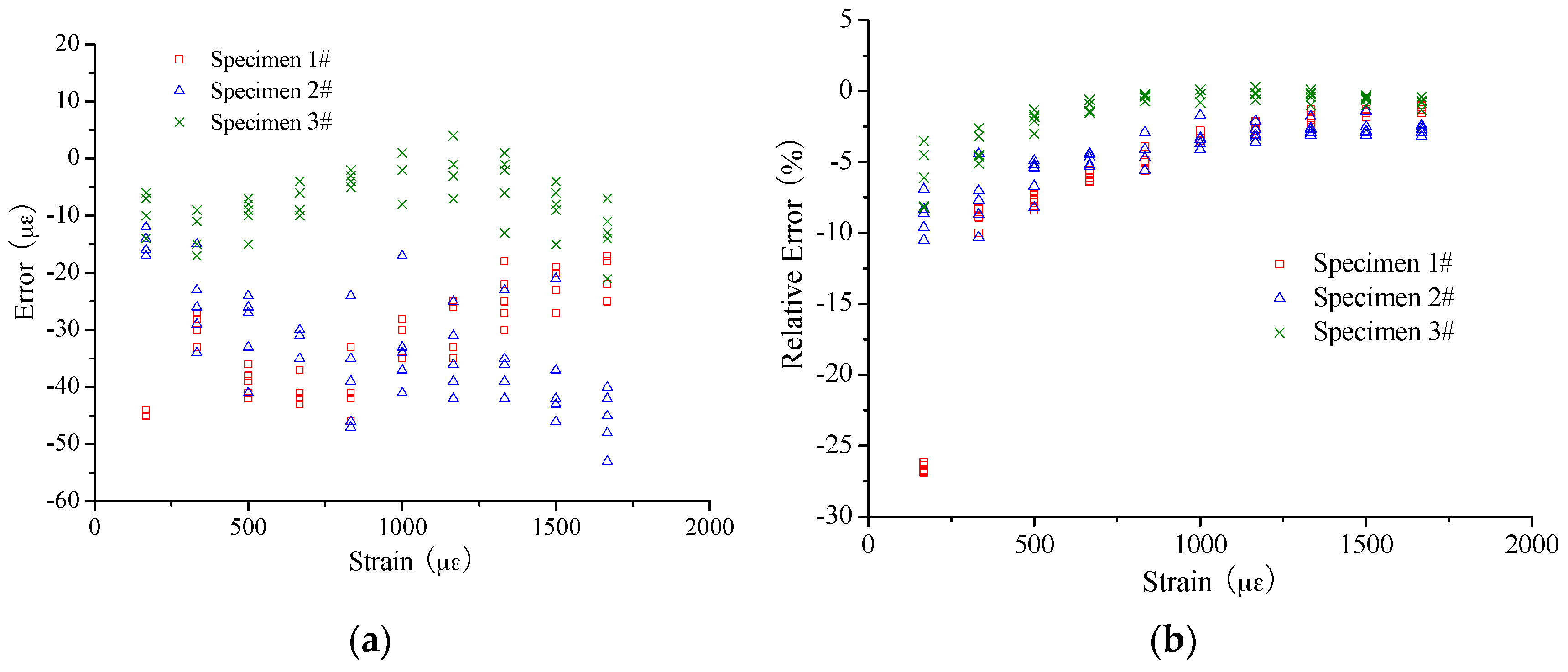
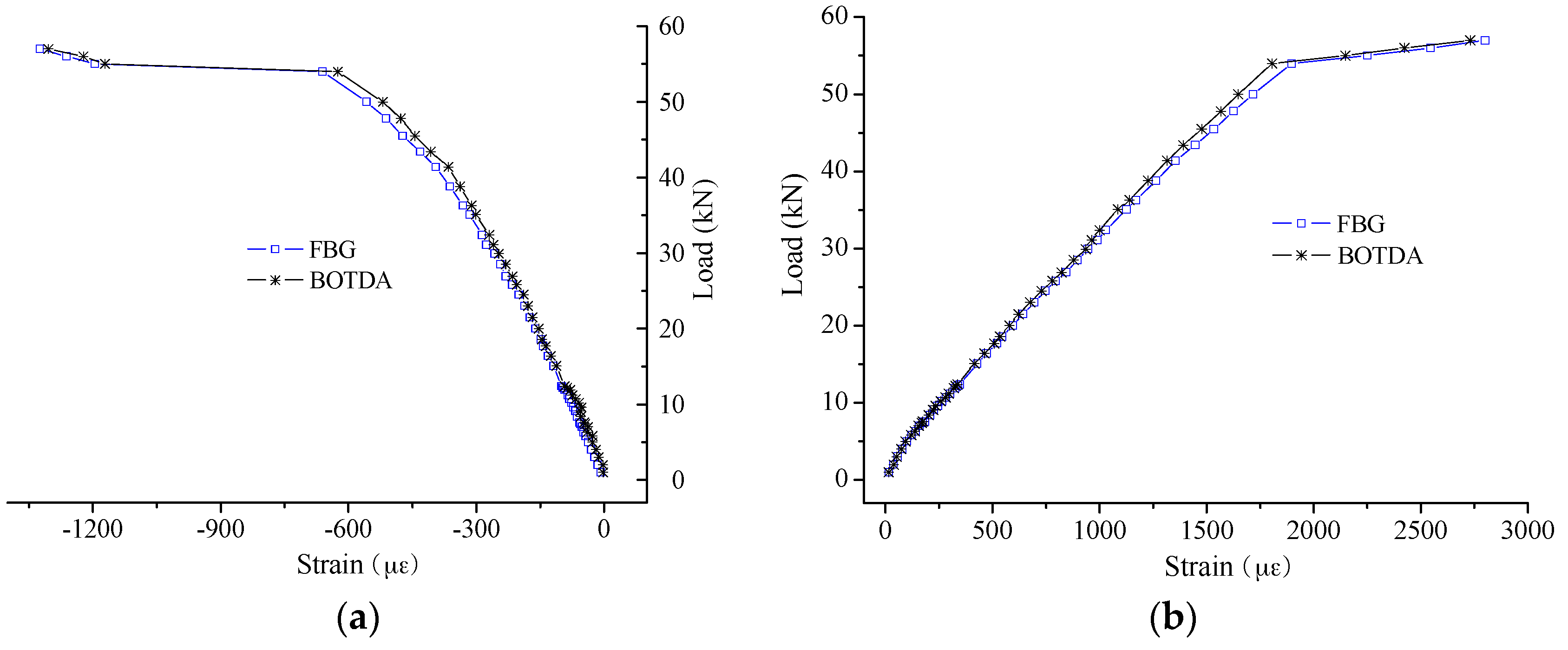
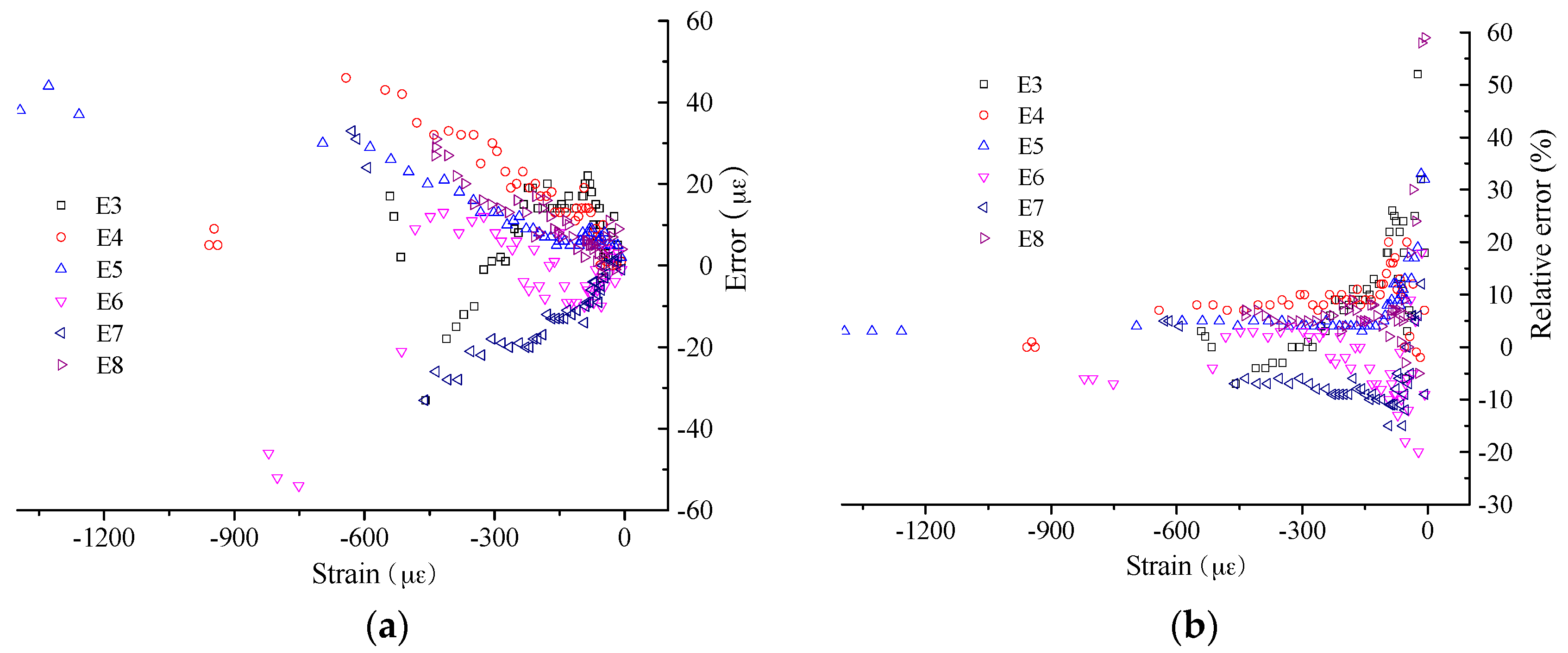
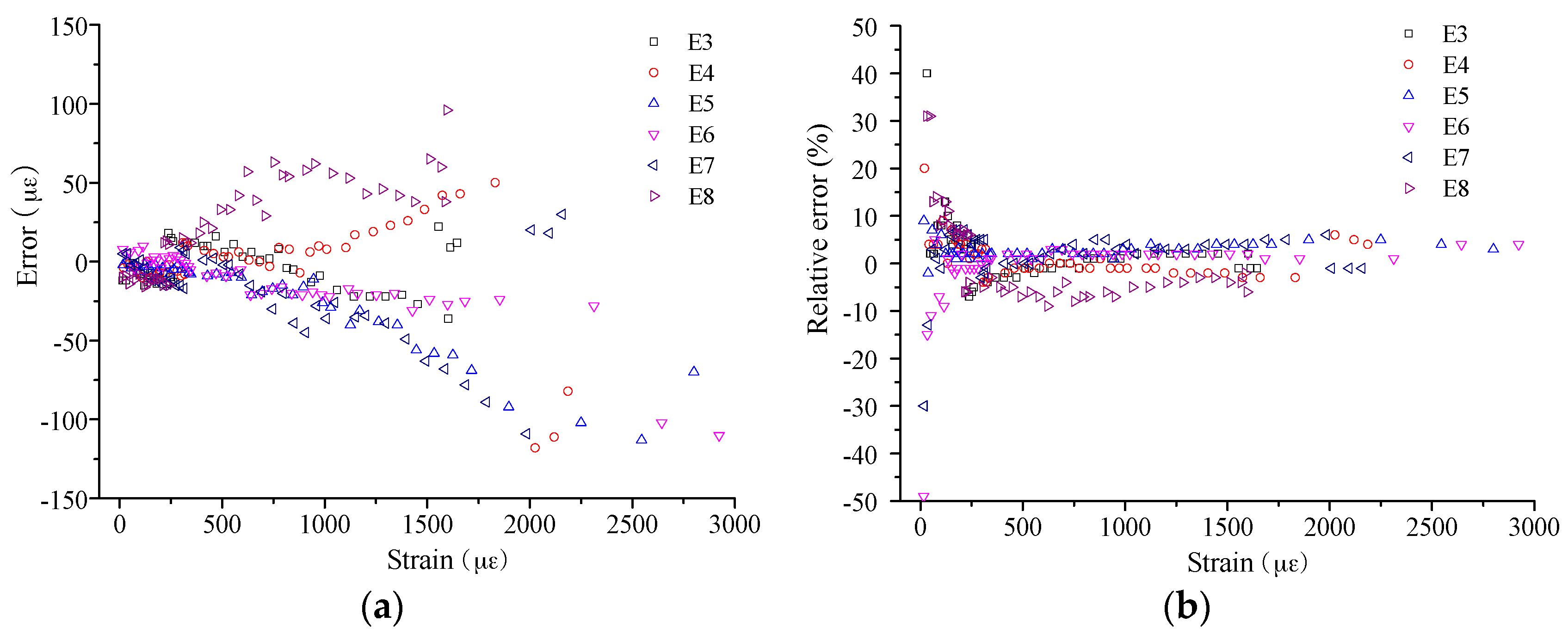
5.1. Strain Sensing Property
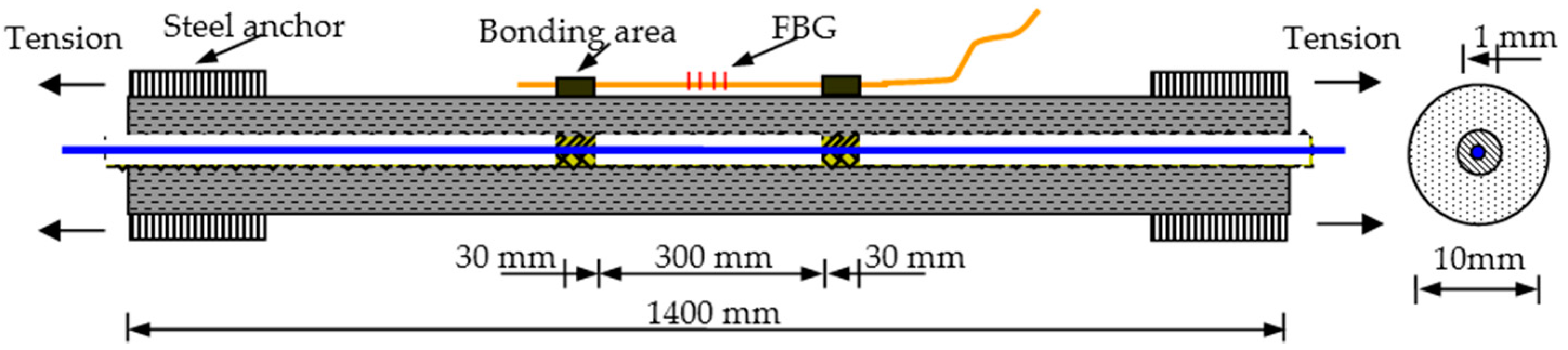
5.1.1. Experimental Description
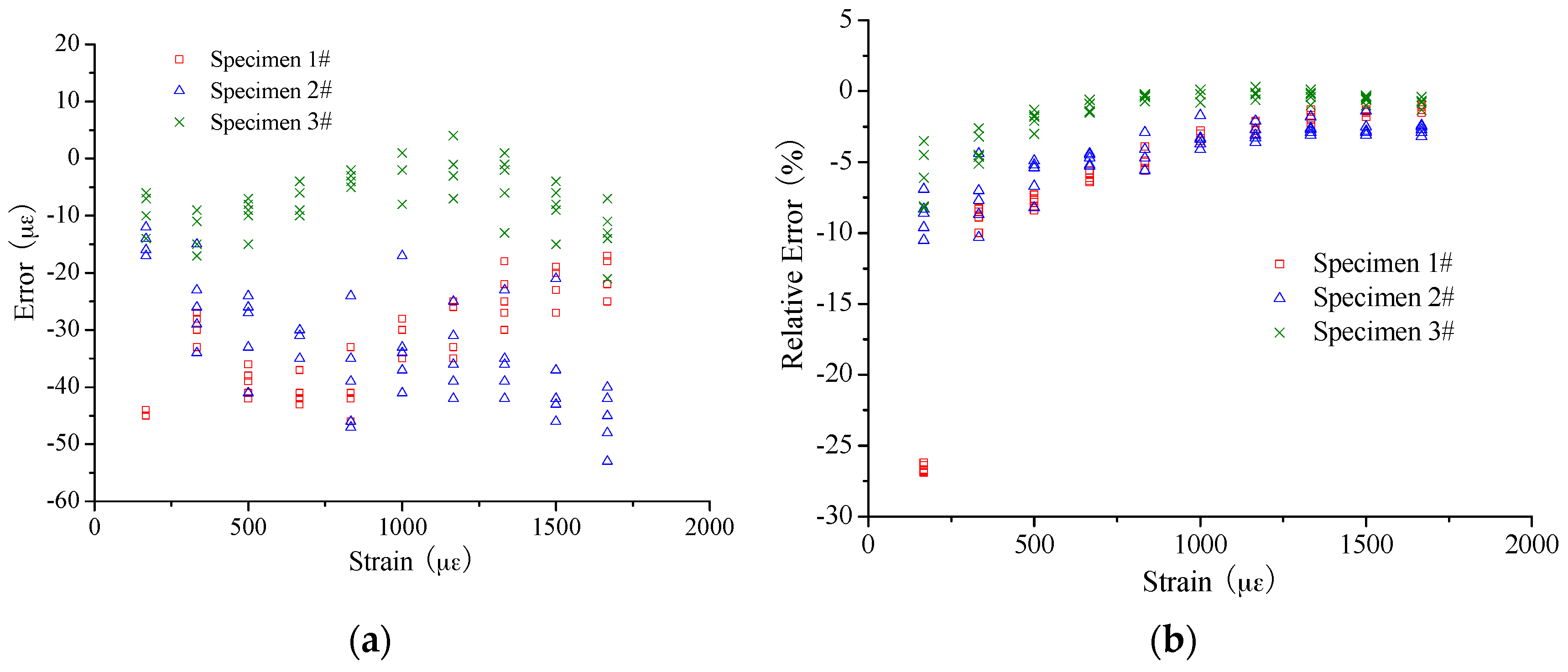
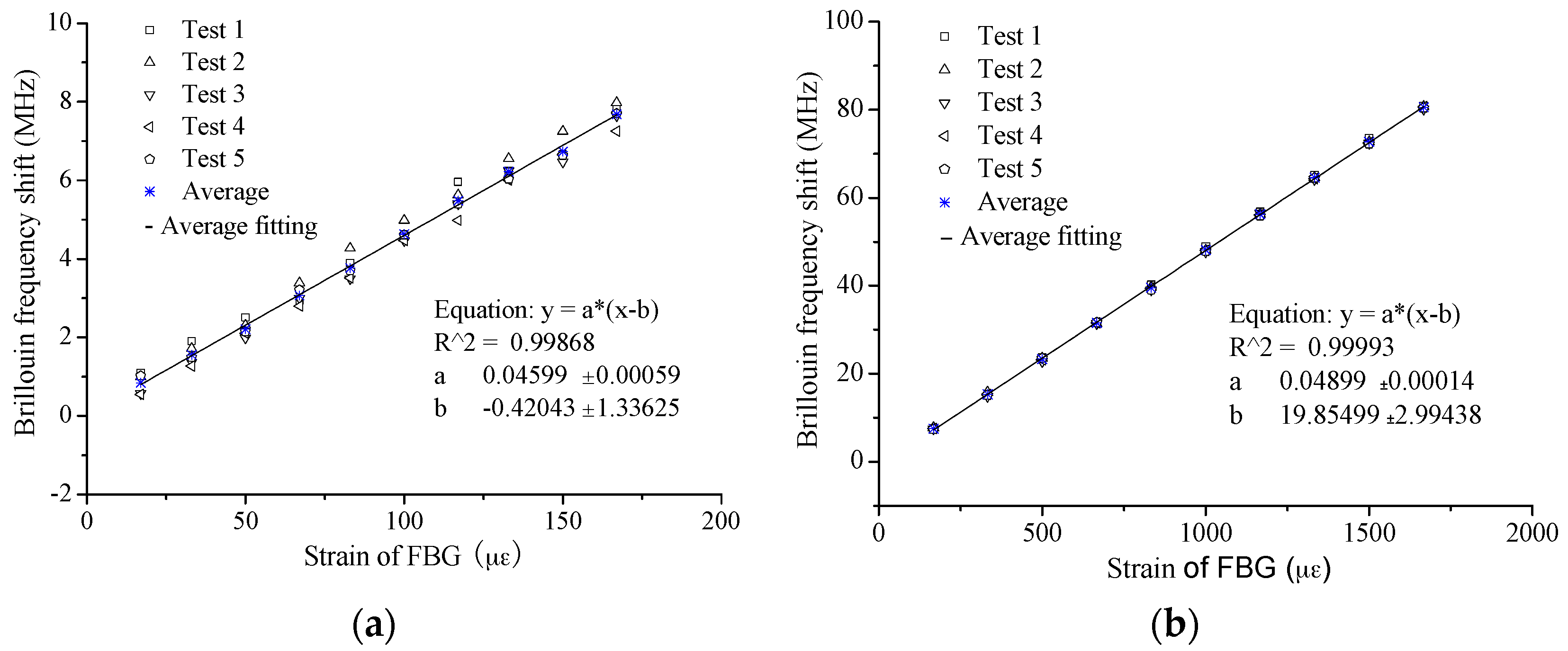
5.1.2. Experimental Results and Analysis
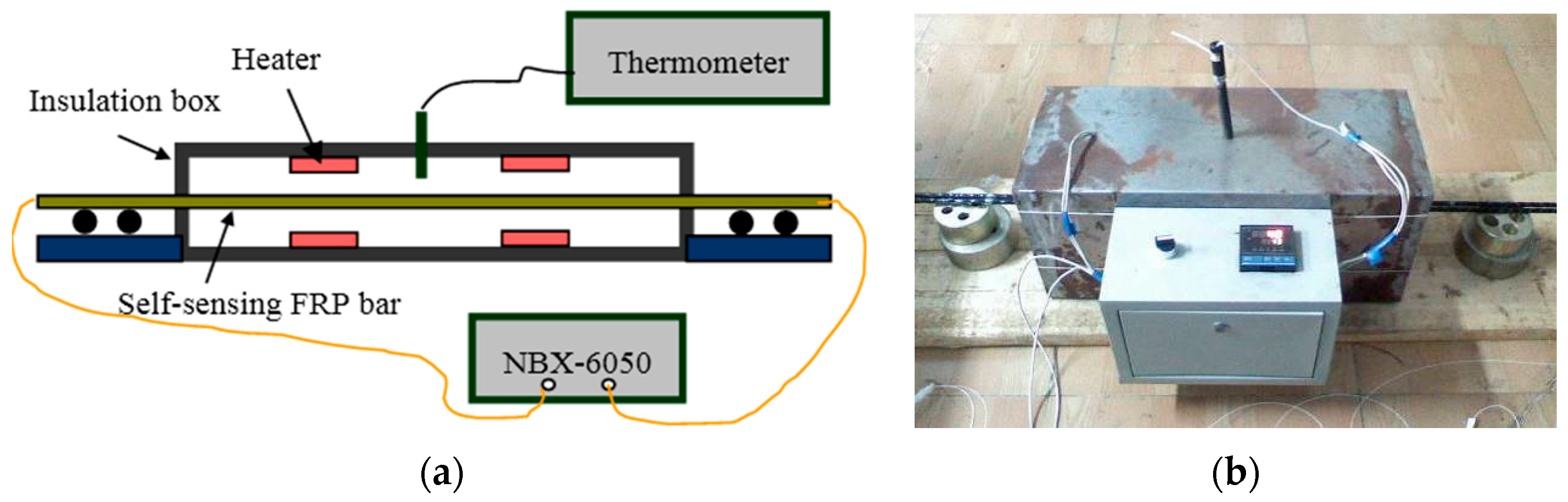
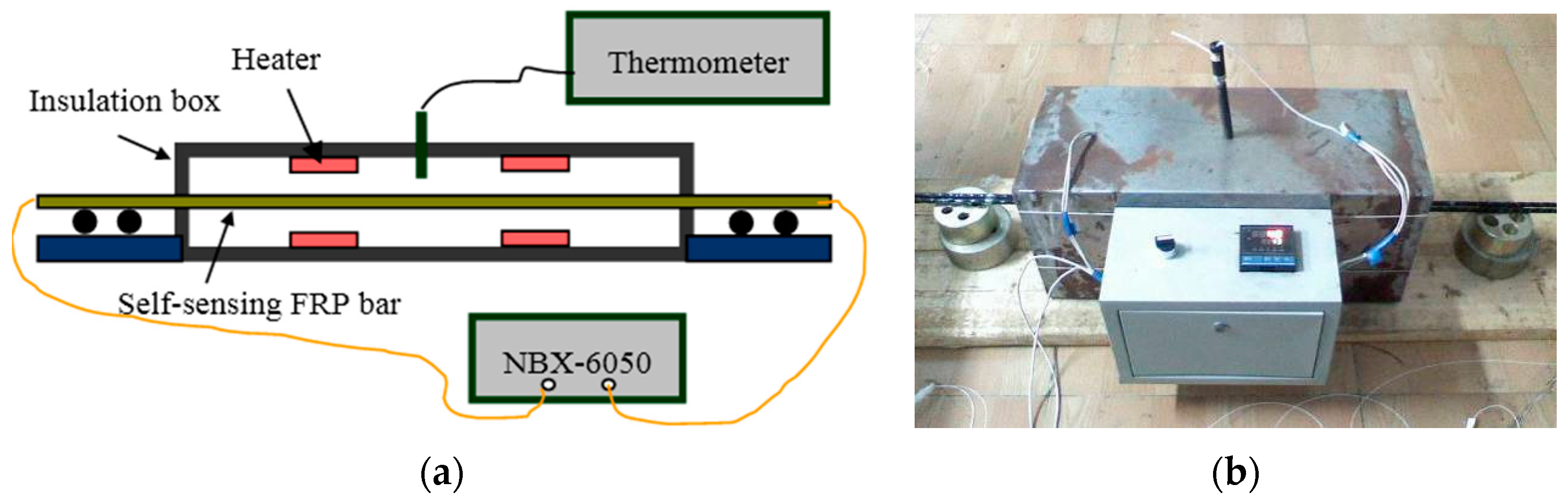
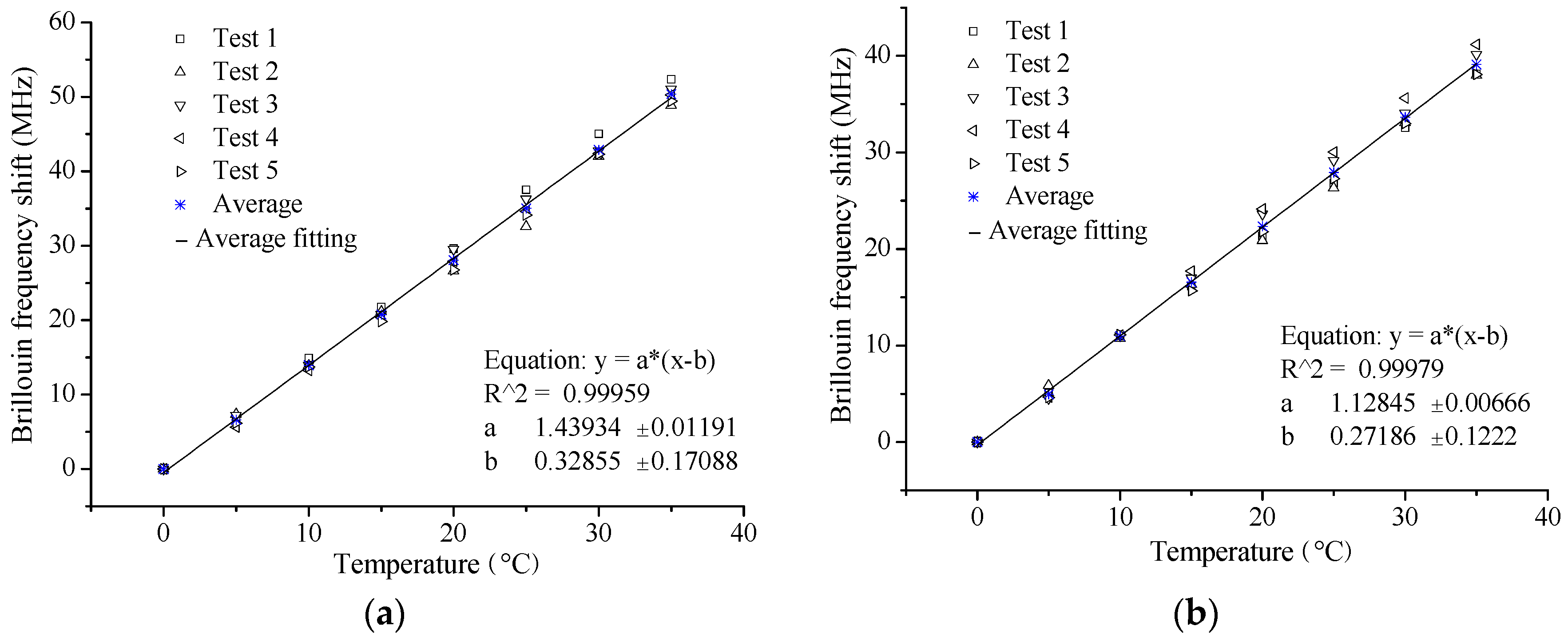
5.2. Temperature Sensing Property
5.2.1. Experimental Description
5.2.2. Experimental Results and Analysis
5.3. Basic Mechanical Property
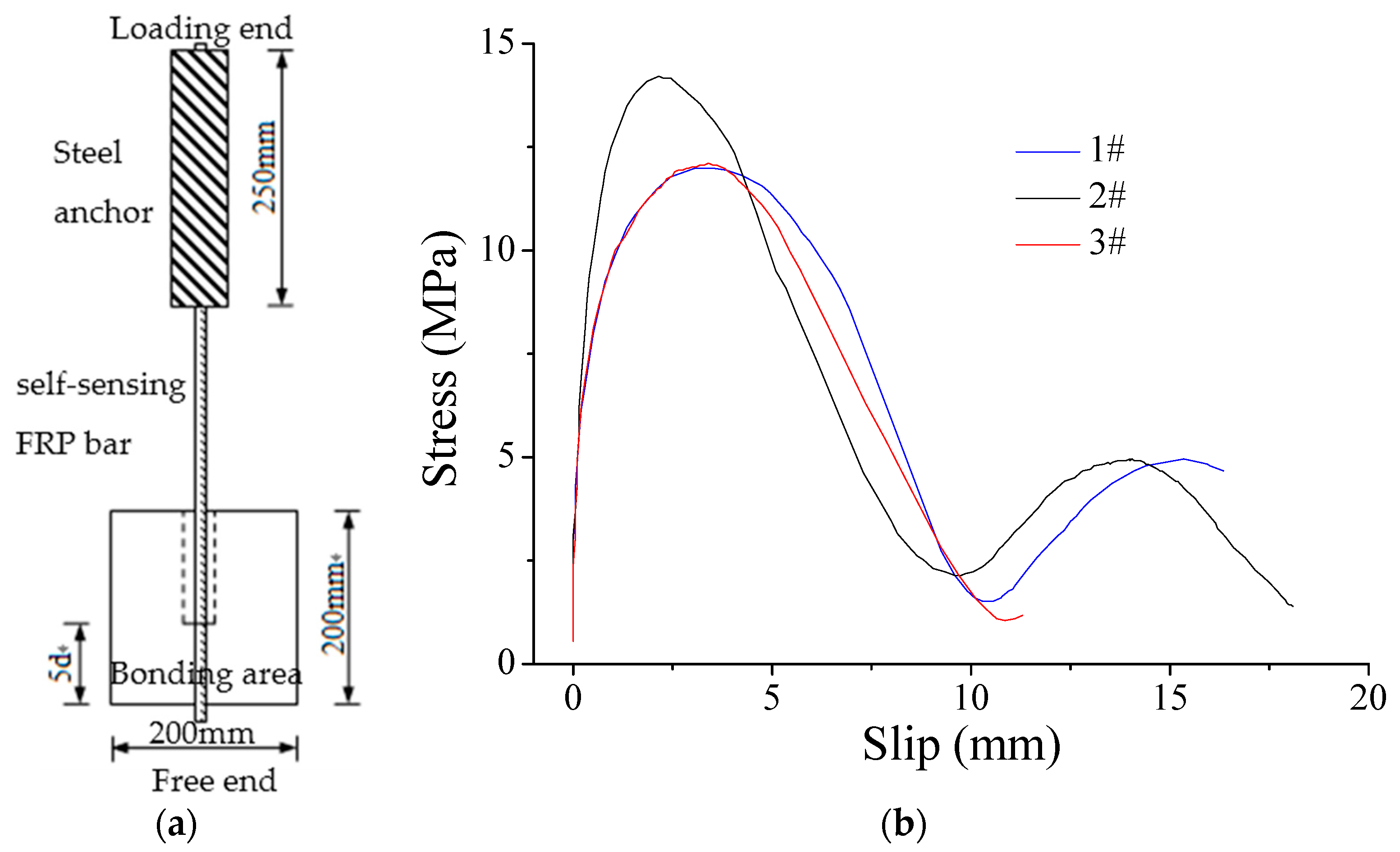
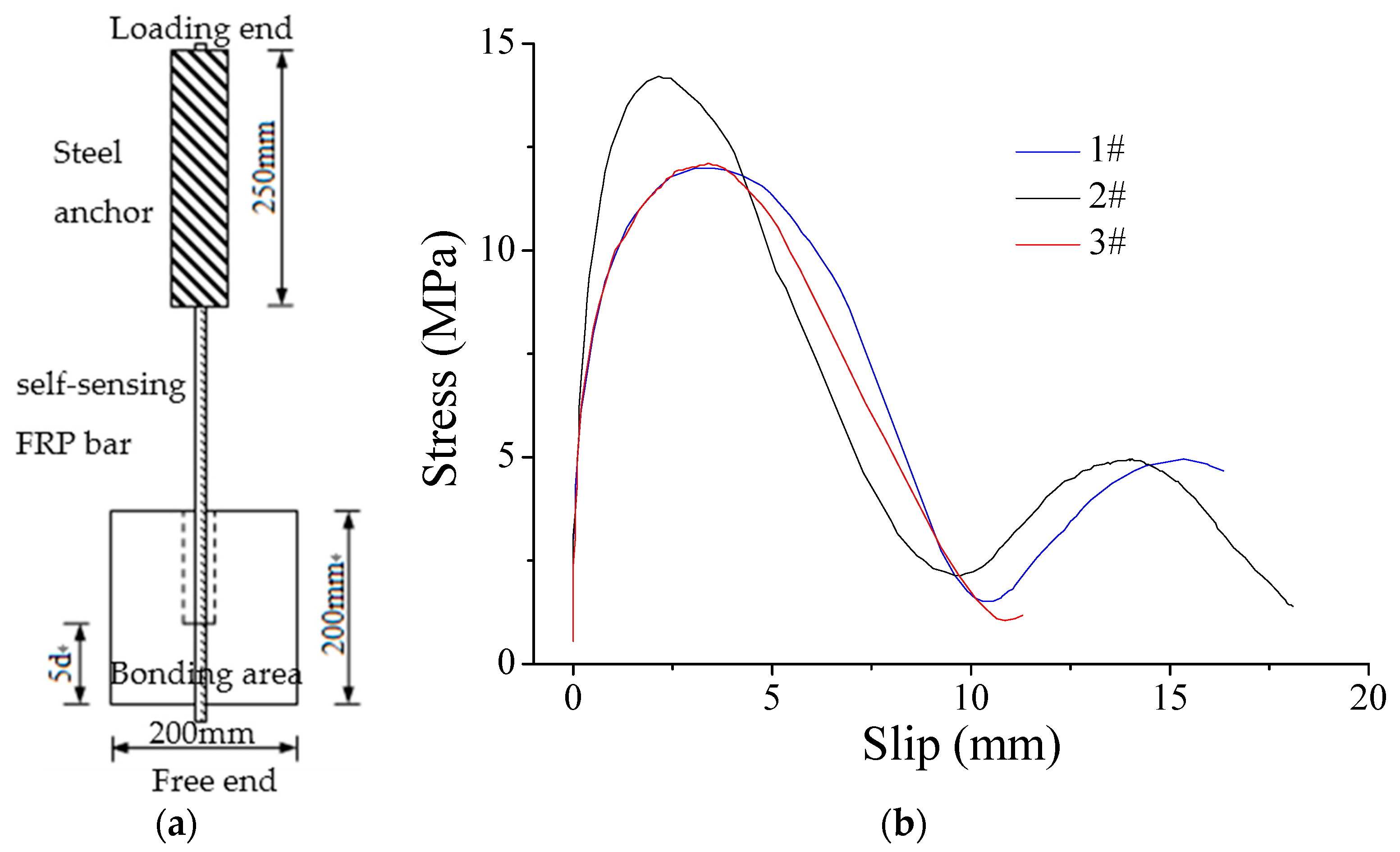
5.4. Bonding Performance between Self-Sensing FRP Bar and Concrete
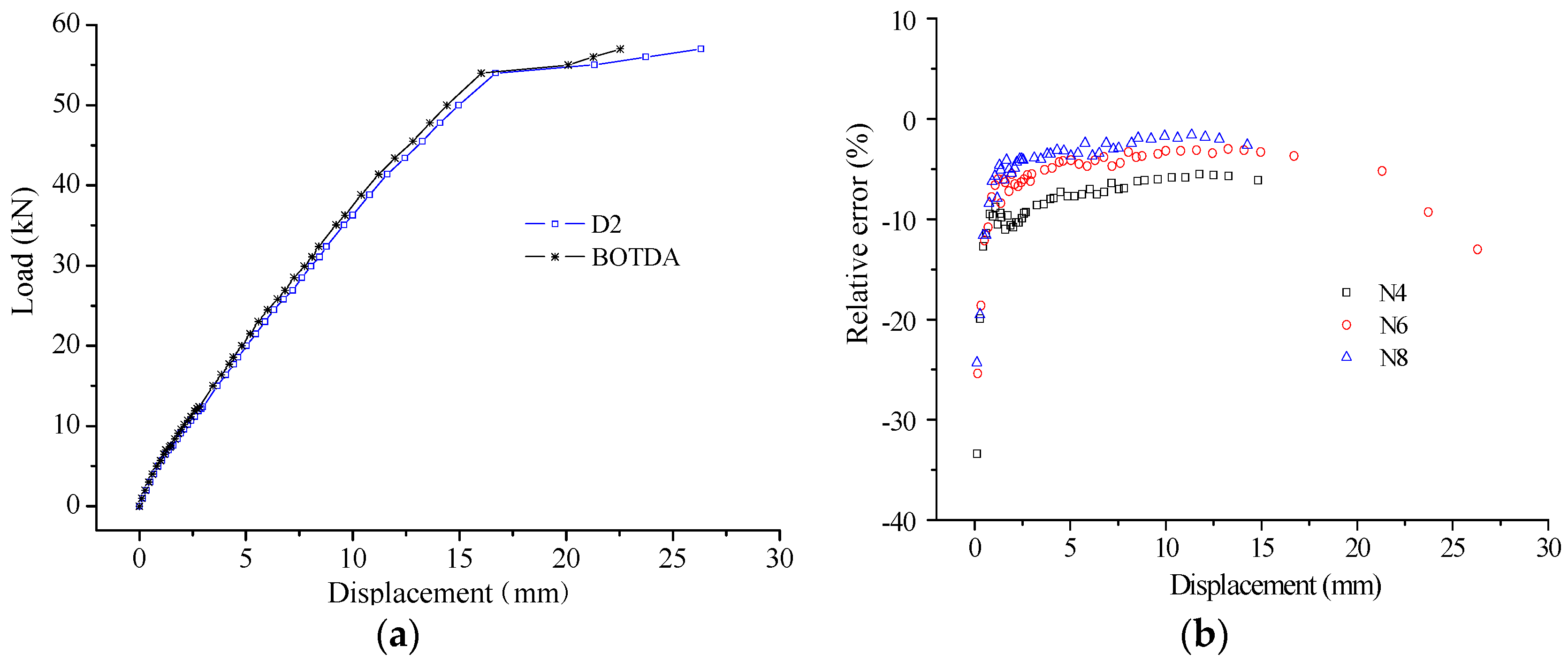
6. Sensing Performance Verification with Concrete Beam
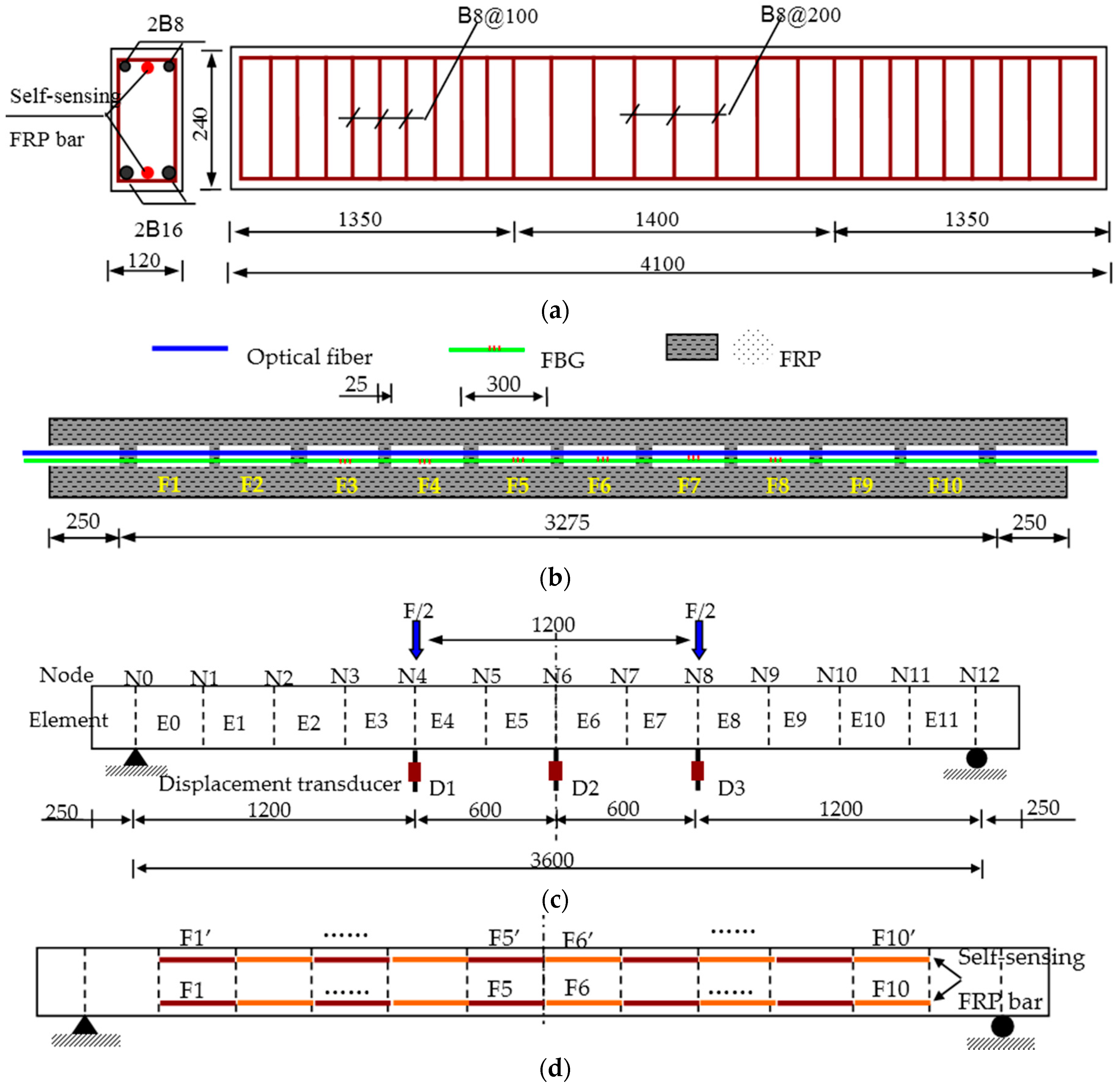
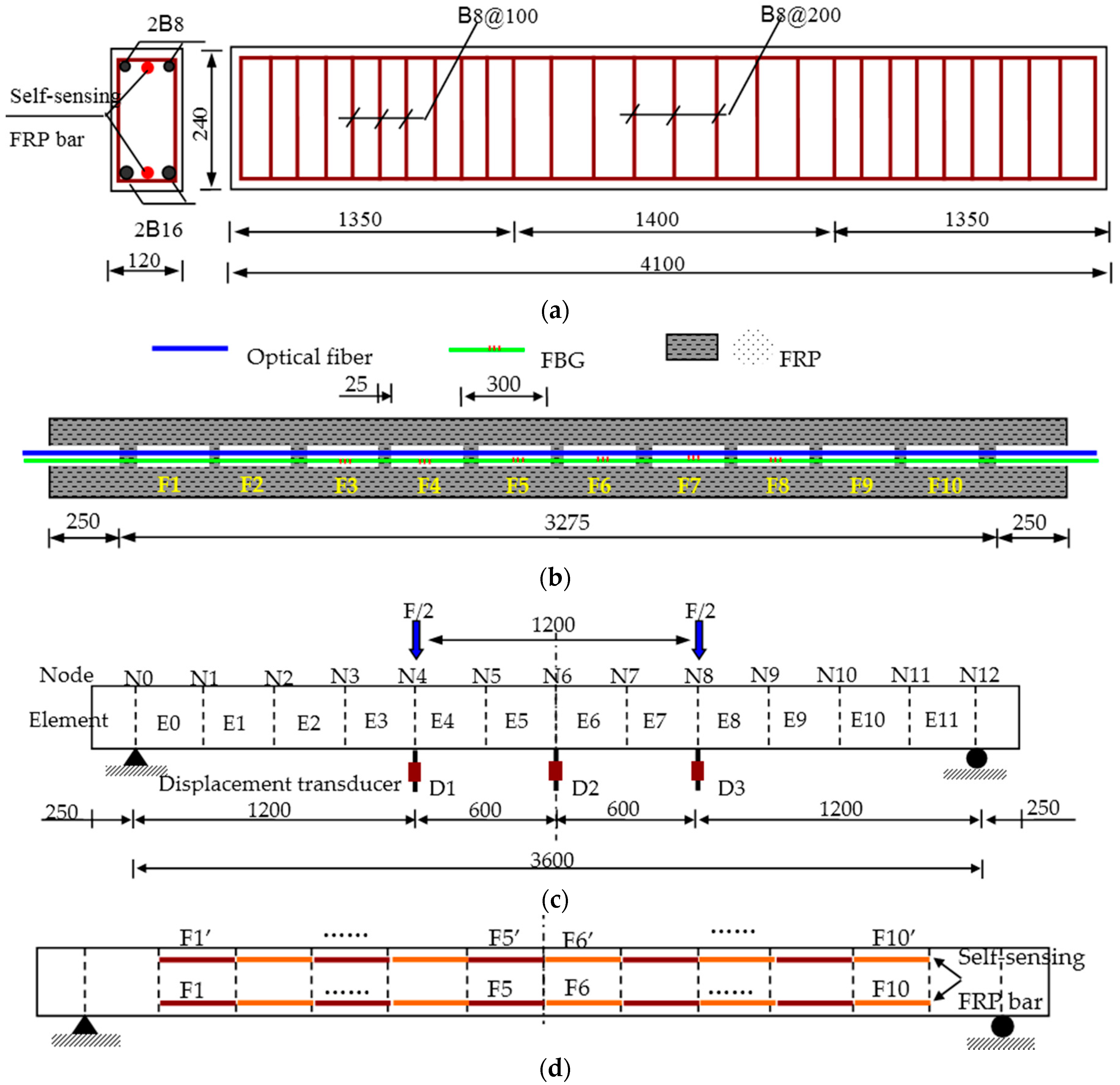
6.1. Experimental Description
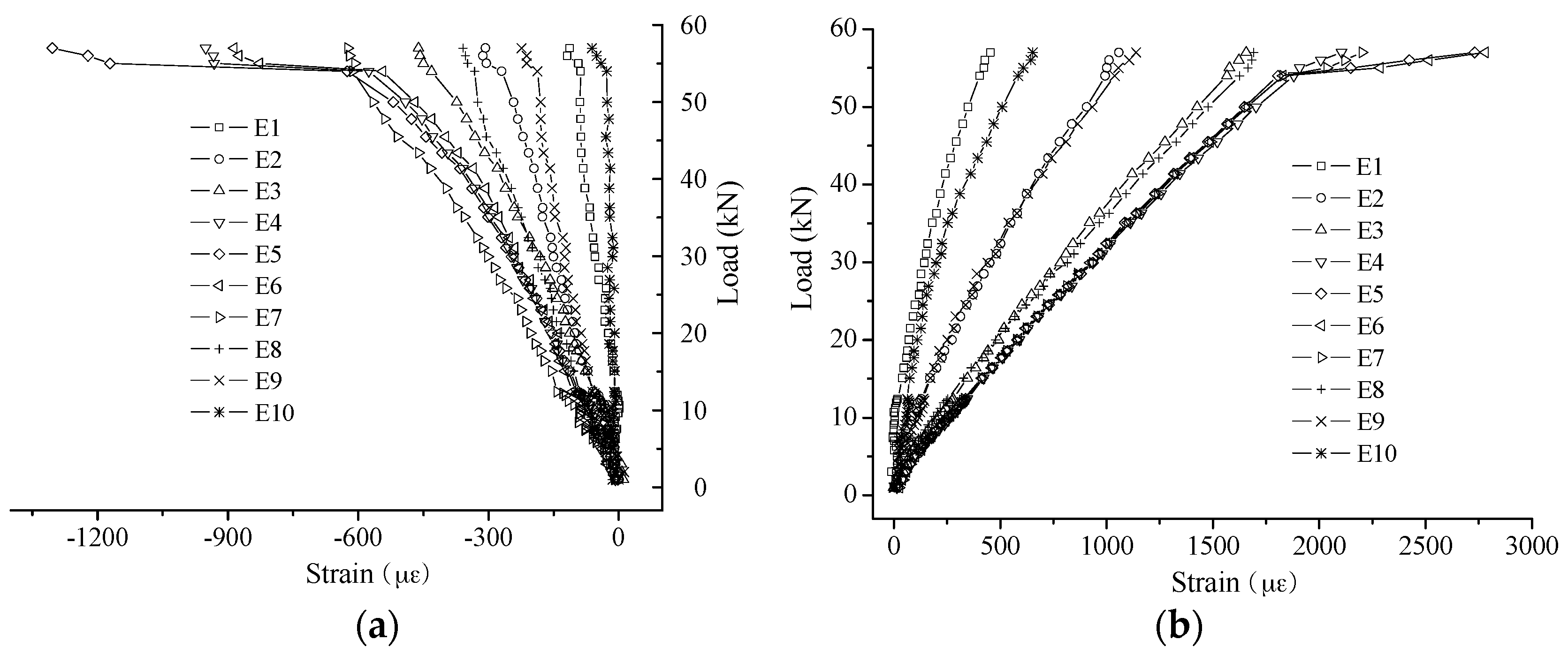
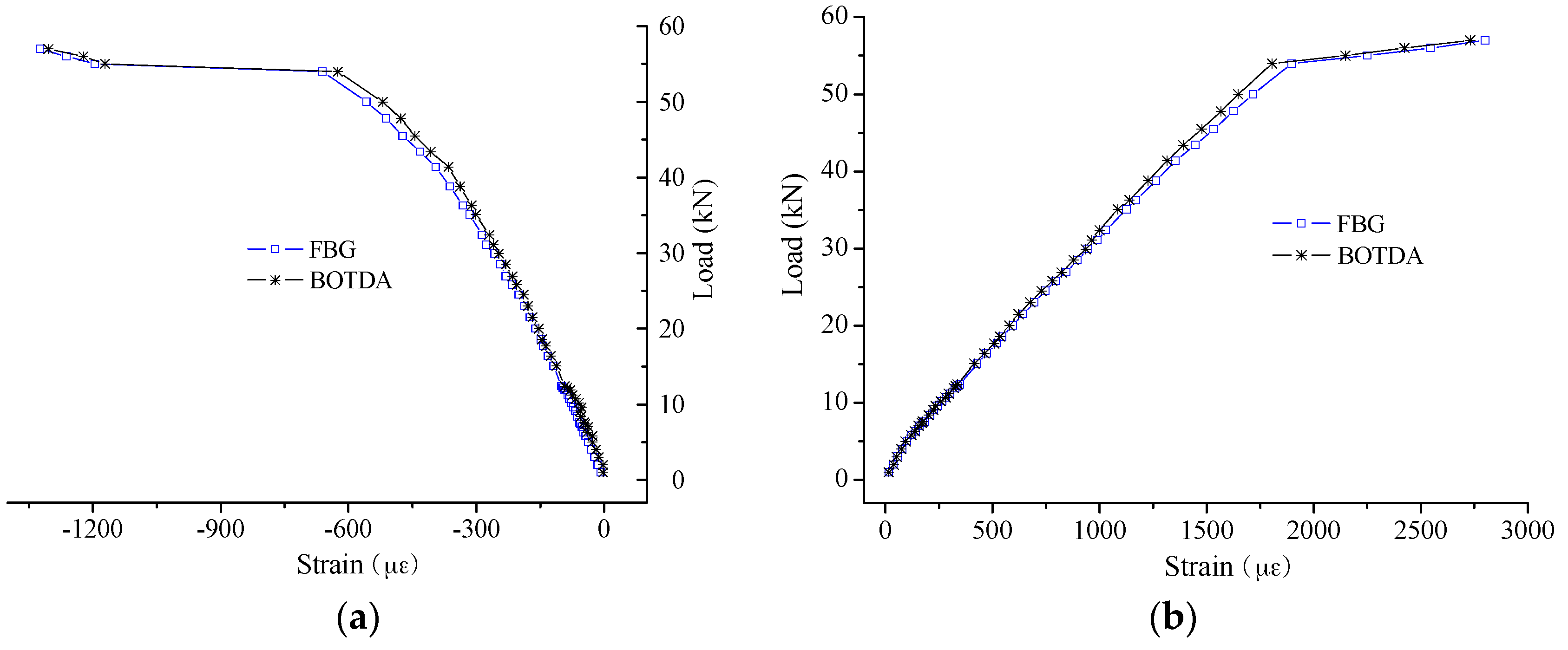
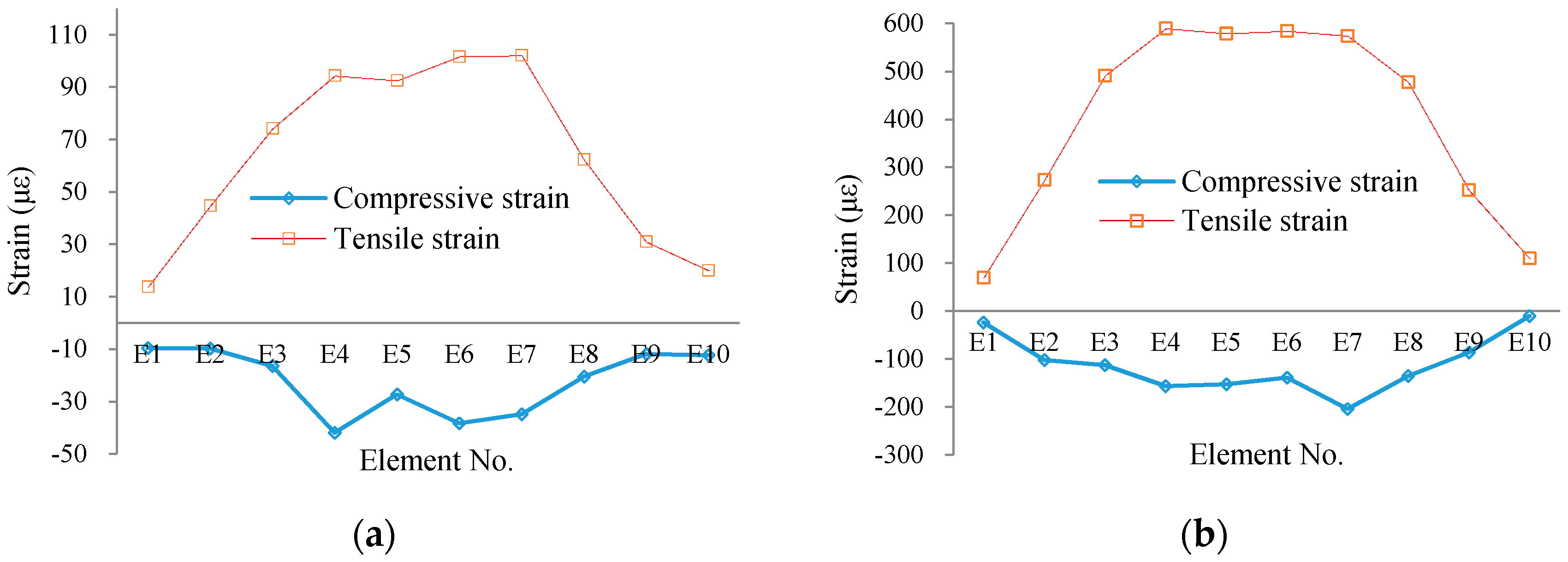
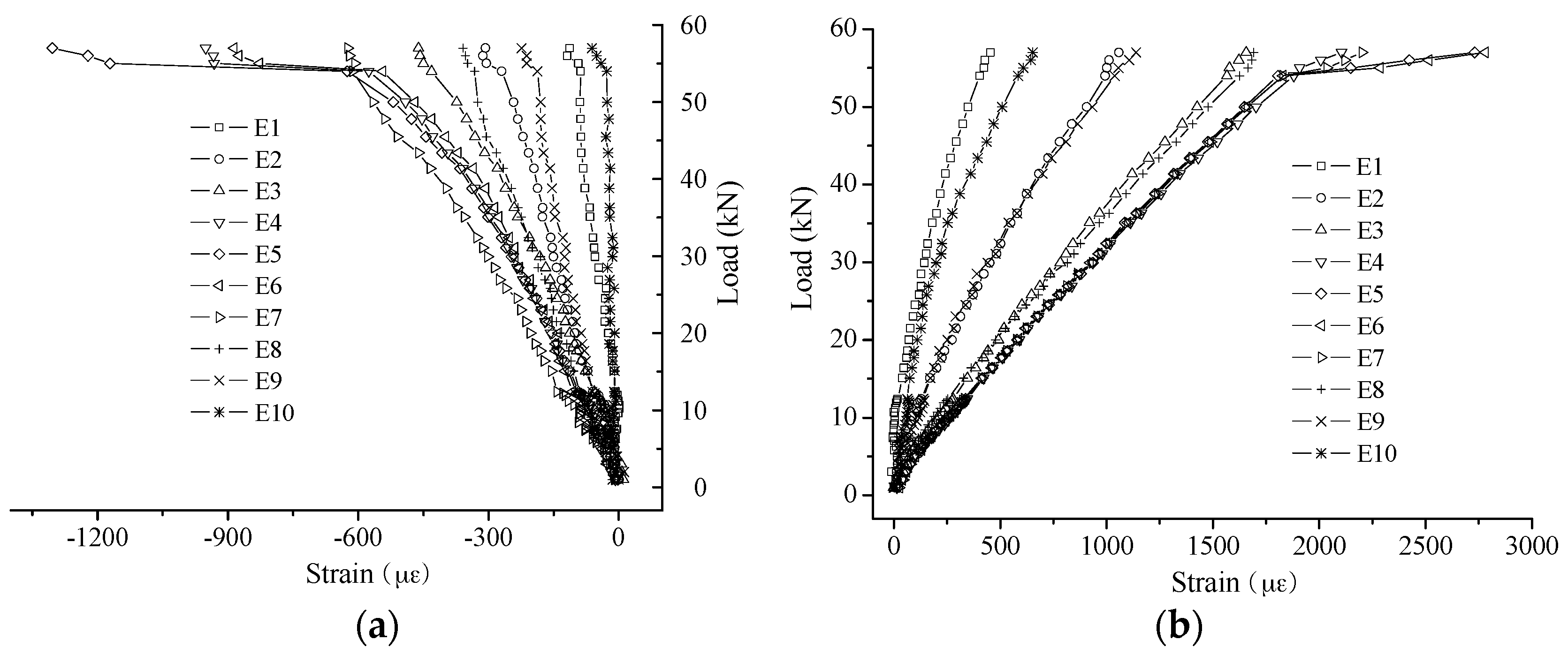
6.2. Experimental Results
7. Conclusions and Remarks
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wu, Z.S.; Xu, B.; Harada, T. Review on structural health monitoring for infrastructures. J. Appl. Mech. JSCE 2003, 6, 1043–1054. [Google Scholar] [CrossRef]
- Damien, K.; Patrice, M.; Keith, W.G.; Qiu, L.; Dirk, H.; Christophe, C. Fiber Bragg grating sensors toward structural health monitoring in composite materials: Challenges and Solutions. Sensors 2014, 14, 7394–7419. [Google Scholar]
- Horiguchi, T.; Kurashima, T.; Tateda, M. Tensile strain dependence of Brillouin frequency shift in silica optical fibers. IEEE Photon. Technol. Lett. 1989, 1, 107–108. [Google Scholar] [CrossRef]
- Wu, Z.S.; Xu, B.; Keiji, H.; Atsuhiko, M. Distributed optic fiber sensing for a full-scale PC girder strengthened with prestressed PBO sheets. Eng. Struct. 2006, 28, 1049–1059. [Google Scholar] [CrossRef]
- Wu, Z.S.; Xu, B.; Takahashi, T.; Harada, T. Performance of a BOTDR optical fibre sensing technique for crack detection in concrete structures. J. Struct. Infrastruct. Eng. 2008, 4, 311–323. [Google Scholar] [CrossRef]
- Zhang, D.; Shi, B.; Xu, H.Z.; Gao, J.Q.; Zhu, H. Experimental study on the deformation monitoringof reinforced concrete T beam using BOTDR. J. Southeast. Univ. 2004, 34, 480–484. [Google Scholar]
- Zhang, W.; Shi, B.; Zhang, Y.F.; Liu, J.; Zhu, Y.Q. The strain field method for structural damage identification using Brillouin optical fiber sensing. Smart Mater. Struct. 2007, 16, 843–850. [Google Scholar] [CrossRef]
- Hiroshi, N.; Koji, K.; Kazuhiko, F.; Masaru, O. Telecommunications tunnel monitoring system based on distributed optical fiber strain measurement. Proc. SPIE 2005, 5855, 168–171. [Google Scholar]
- Naruse, H.; Uchiyama, Y.; Kurashima, T.; Unno, S. River levee change detection using distributed fiber optic strain sensor. IEICE Trans. Electron. 2000, 83, 462. [Google Scholar]
- Anthony, W.B.; Bruce, G.C.; Kellie, B. Dark-Pulse Brillouin Optical Time-Domain sensor with 20-mm spatial resolution. J. Lightwave Technol. 2007, 25, 381–386. [Google Scholar]
- Li, W.H.; Bao, X.Y.; Li, Y.; Chen, L. Differential pulse-width pair BOTDA for high spatial resolution sensing. Opt. Express 2008, 16, 21616–61625. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Wu, Z.S. Performance evaluation of BOTDR-based distributed fiber optic sensors for crack monitoring. Struct. Health Monit. 2008, 7, 143–156. [Google Scholar] [CrossRef]
- Zhou, Z.; He, J.P.; Yan, K.; Ou, J.P. Large scale distribution monitoring of FRP-OF based on BOTDR technique for infrastructures. Proc. SPIE 2007, 6530, 061–0612. [Google Scholar]
- Tang, Y.S.; Wu, Z.S.; Yang, C.Q.; Shen, S.; Wu, G.; Hong, W. Development of self-sensing BFRP bars with distributed optic fiber sensors. Proc. SPIE 2009, 7293, 171–1710. [Google Scholar]
- Tang, Y.S.; Wu, Z.S.; Yang, C.Q.; Wu, G.; Shen, S. A new type of smart BFRP bars as both reinforcements and sensors for civil engineering application. Smart Mater. Struct. 2010, 19, 1–14. [Google Scholar] [CrossRef]
- Scarcia, W.; Palma, G.; Falconi, M.C.; de Leonardis, F.; Passaro, V.M.N.; Prudenzano, F. Electromagnetic modelling of fiber sensors for low-cost and high sensitivity temperature monitoring. Sensors 2015, 15, 29855–29870. [Google Scholar] [CrossRef] [PubMed]
- Kishida, K.; Li, C.H. Pulse pre-pump-BOTDA technology for new generation of distributed strain measuring system. Proc. Struct. Health Monit. Intell. Infrastruct. 2006, 1, 471–477. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gauge Length | Test 1 | Test 2 | Test 3 | Test 4 | Test 5 | Average | Standard Deviation |
|---|---|---|---|---|---|---|---|
| 5 cm | −0.084 | −0.079 | −0.050 | −0.076 | −0.052 | −0.068 | 0.016 |
| 10 cm | 1.099 | 1.094 | 1.099 | 1.099 | 1.114 | 1.101 | 0.007 |
| 15 cm | 1.117 | 1.119 | 1.142 | 1.115 | 1.150 | 1.128 | 0.016 |
| 20 cm | 1.125 | 1.107 | 1.138 | 1.094 | 1.125 | 1.118 | 0.017 |
| 30 cm | 1.005 | 0.996 | 1.020 | 0.976 | 0.979 | 0.995 | 0.018 |
| Specimen No. | Test 1 | Test 2 | Test 3 | Test 4 | Test 5 | Average | Standard Deviation |
|---|---|---|---|---|---|---|---|
| 1# | 45.6 | 45.9 | 46.1 | 46.4 | 44.5 | 45.5 | 0.7 |
| 2# | 45.3 | 47.8 | 46.3 | 44.9 | 45 | 46 | 1.2 |
| 3# | 46.3 | 46.1 | 47.4 | 47.1 | 46.7 | 46.9 | 0.5 |
| Specimen No. | Test 1 | Test 2 | Test 3 | Test 4 | Test 5 | Average | Standard Deviation |
|---|---|---|---|---|---|---|---|
| 1# | 49.6 | 49.9 | 49.7 | 49.8 | 49.9 | 49.8 | 0.1 |
| 2# | 49.1 | 48.6 | 48.7 | 48.6 | 48.6 | 48.7 | 0.2 |
| 3# | 49.3 | 49.7 | 49.7 | 49.8 | 49.9 | 49.7 | 0.2 |
| Specimen No. | Test 1 | Test 2 | Test 3 | Test 4 | Test 5 | Average | Standard Deviation |
|---|---|---|---|---|---|---|---|
| 1# | 1.541 | 1.468 | 1.513 | 1.439 | 1.479 | 1.488 | 0.040 |
| 2# | 1.508 | 1.373 | 1.454 | 1.446 | 1.416 | 1.439 | 0.050 |
| 3# | 1.660 | 1.493 | 1.515 | 1.517 | 1.501 | 1.537 | 0.069 |
| Free OF | 1.088 | 1.080 | 1.166 | 1.206 | 1.103 | 1.128 | 0.055 |
| Specimen No. | 1# | 2# | 3# | Average | Standard Deviation |
|---|---|---|---|---|---|
| Elastic modulus (GPa) | 45.5 | 45.7 | 45.5 | 45.6 | 0.1 |
| Ultimate strength (MPa) | 1056 | 997 | 1005 | 1019 | 32 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, Y.; Wu, Z. Distributed Long-Gauge Optical Fiber Sensors Based Self-Sensing FRP Bar for Concrete Structure. Sensors 2016, 16, 286. https://doi.org/10.3390/s16030286
Tang Y, Wu Z. Distributed Long-Gauge Optical Fiber Sensors Based Self-Sensing FRP Bar for Concrete Structure. Sensors. 2016; 16(3):286. https://doi.org/10.3390/s16030286
Chicago/Turabian StyleTang, Yongsheng, and Zhishen Wu. 2016. "Distributed Long-Gauge Optical Fiber Sensors Based Self-Sensing FRP Bar for Concrete Structure" Sensors 16, no. 3: 286. https://doi.org/10.3390/s16030286