
Preliminary Study on Continuous Recognition of Elbow Flexion/Extension Using sEMG Signals for Bilateral Rehabilitation

Abstract
:1. Introduction
2. Materials and Methods
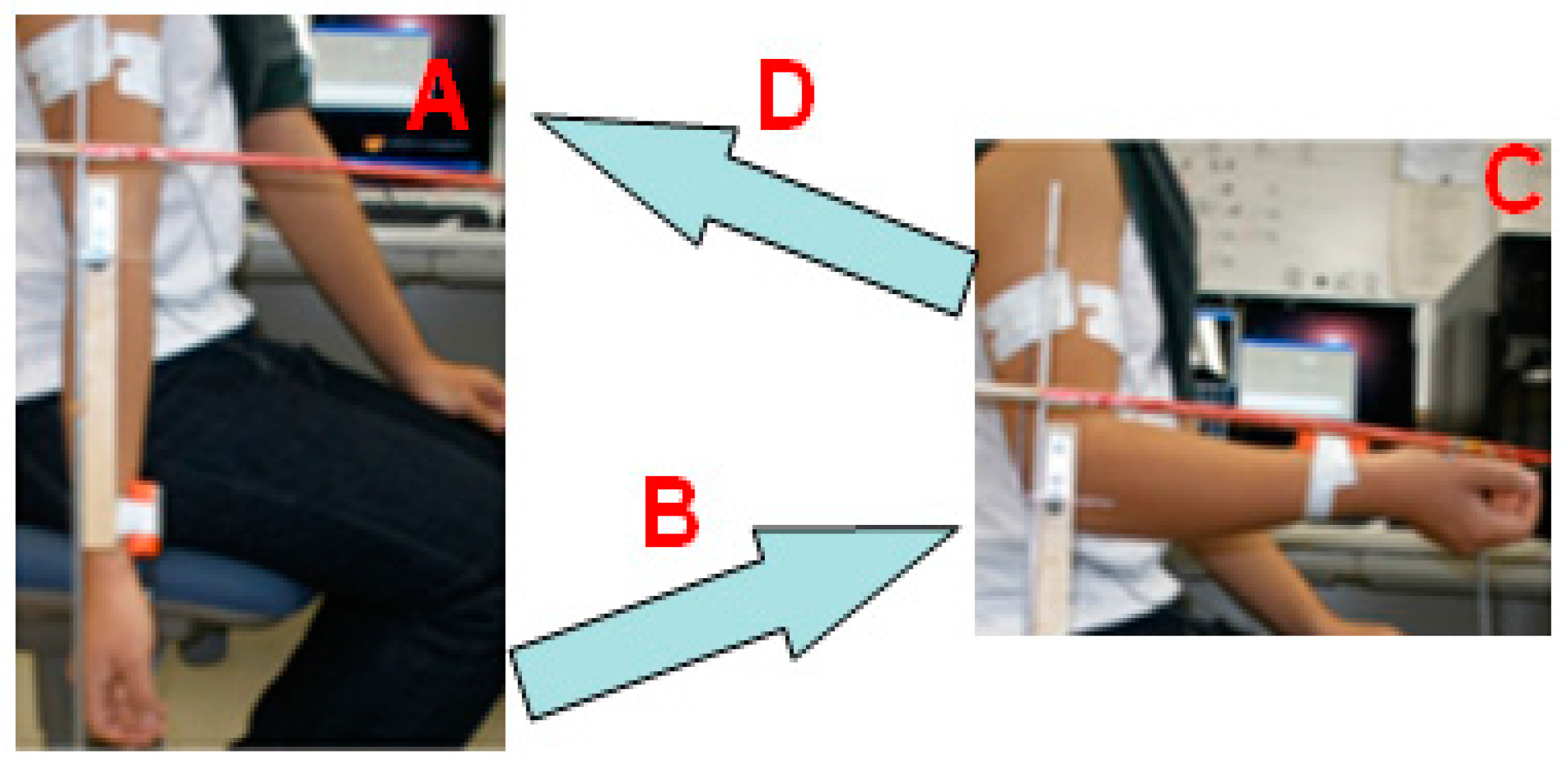
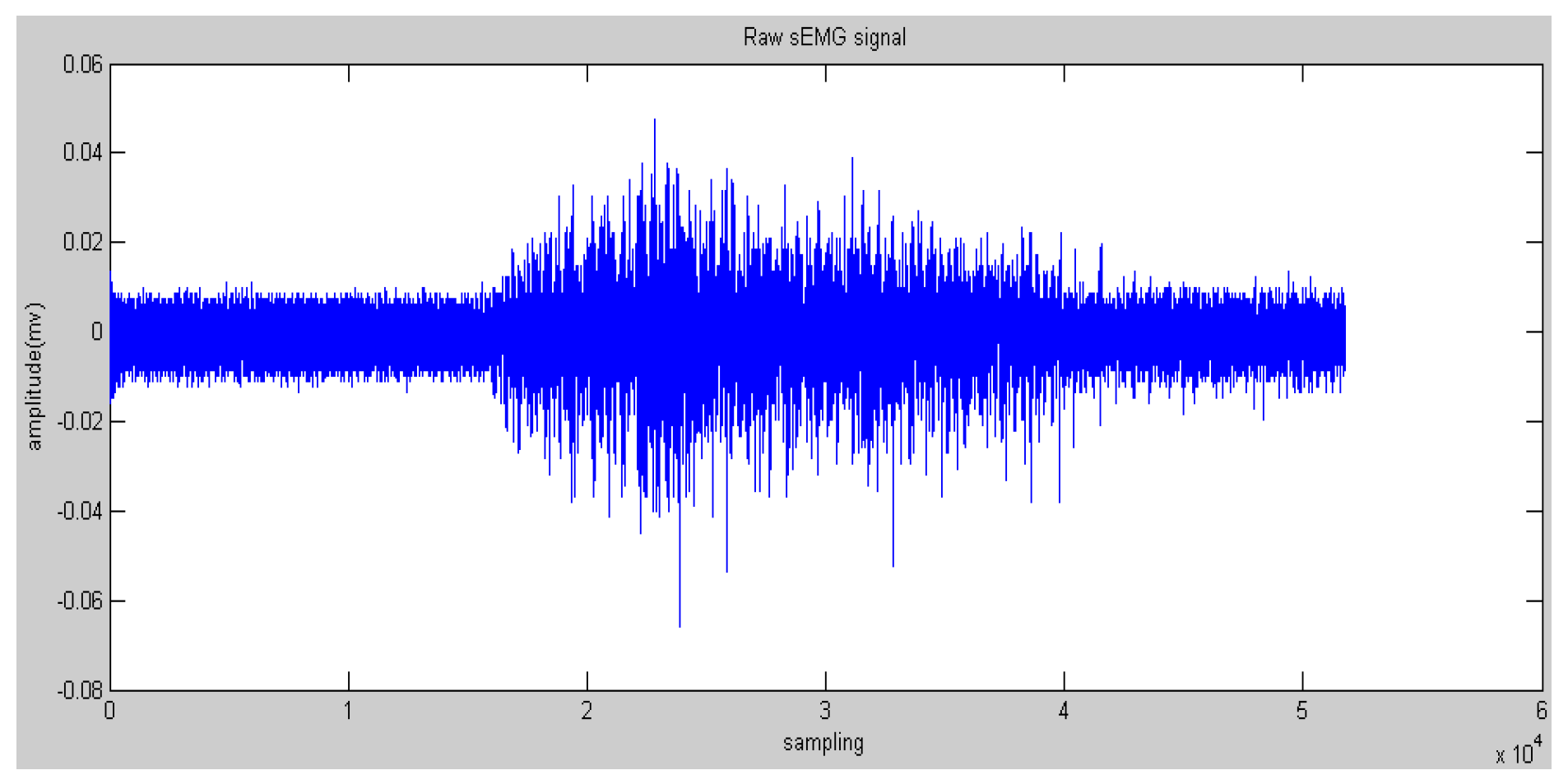
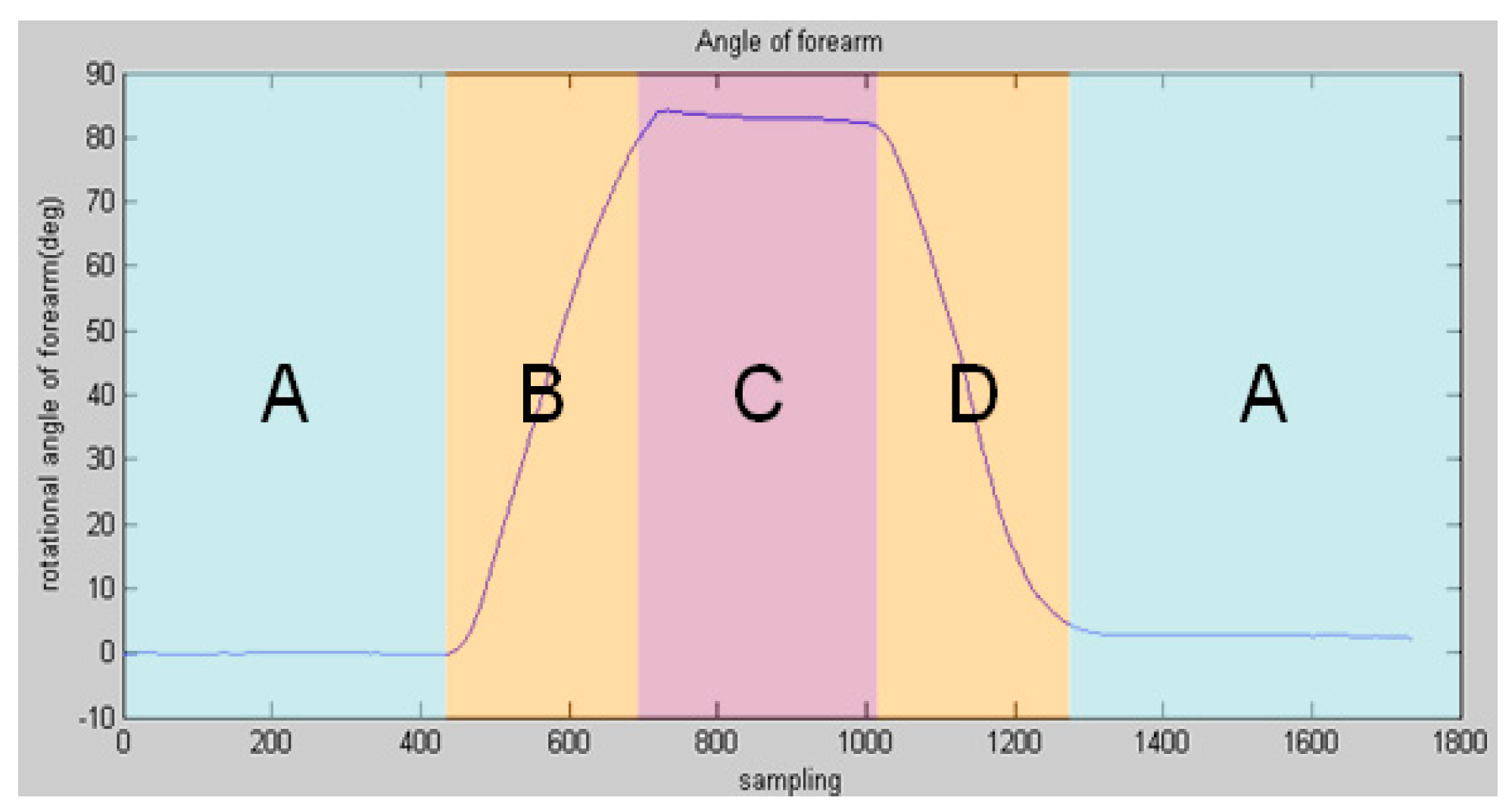
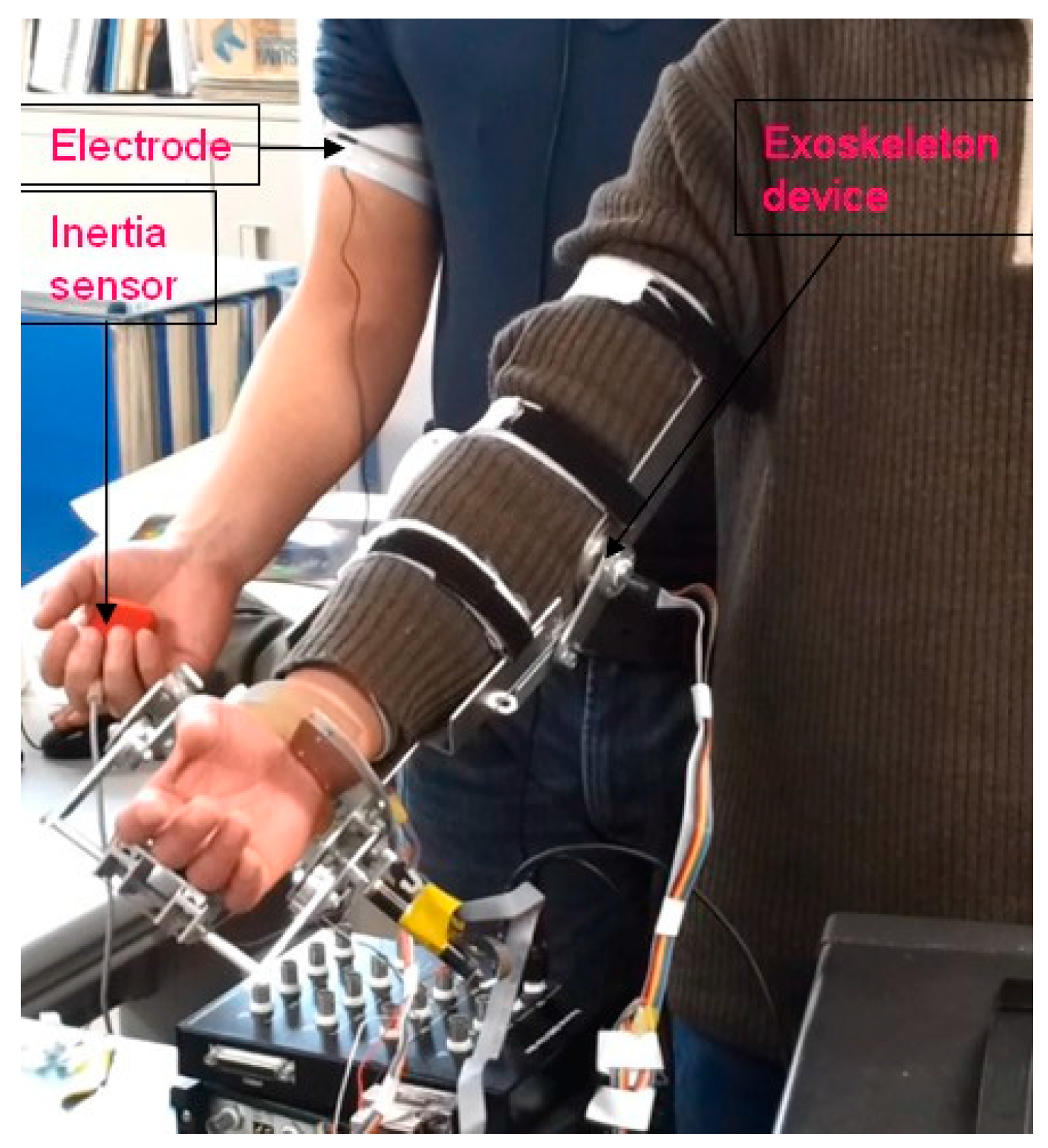
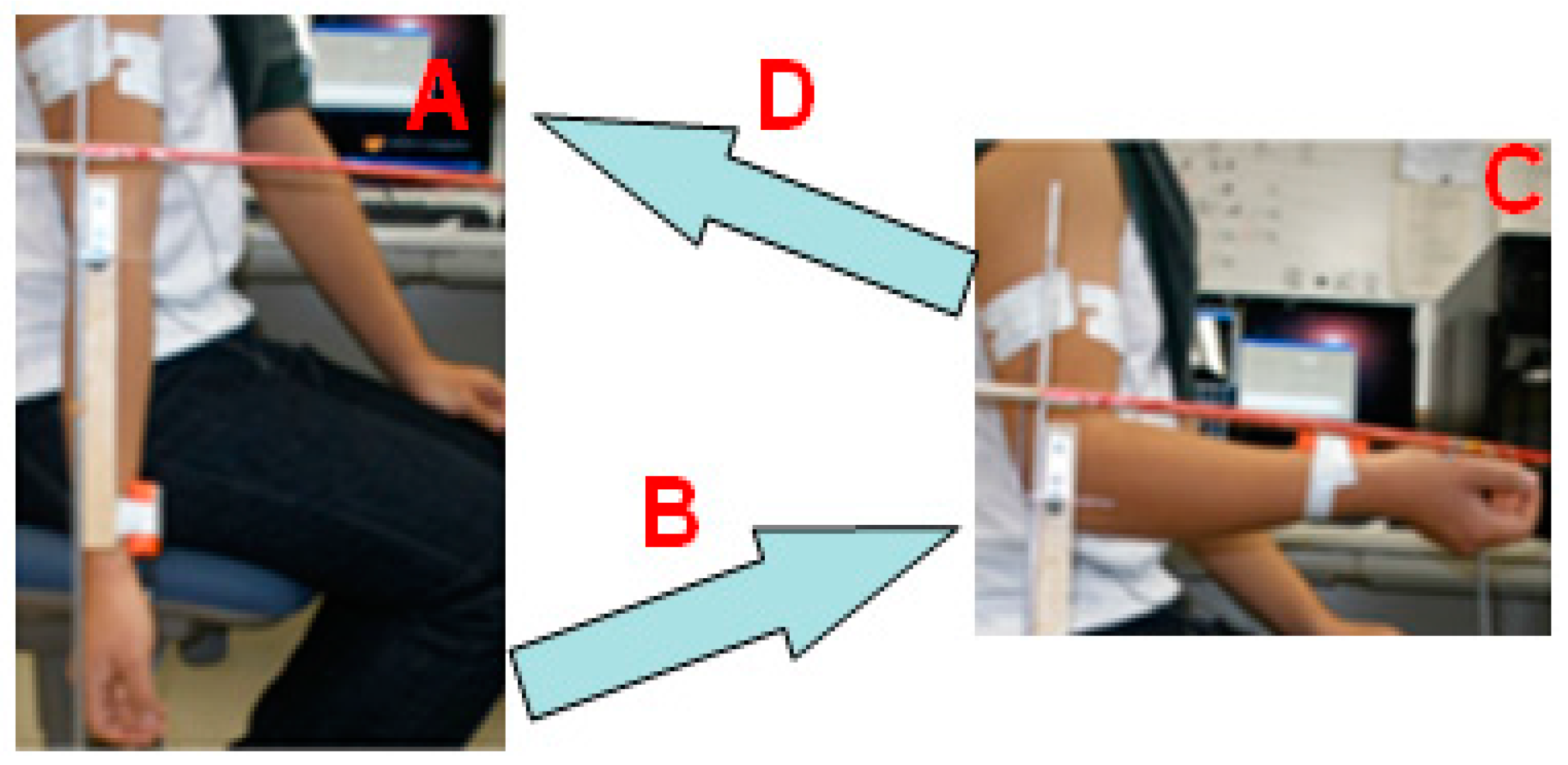
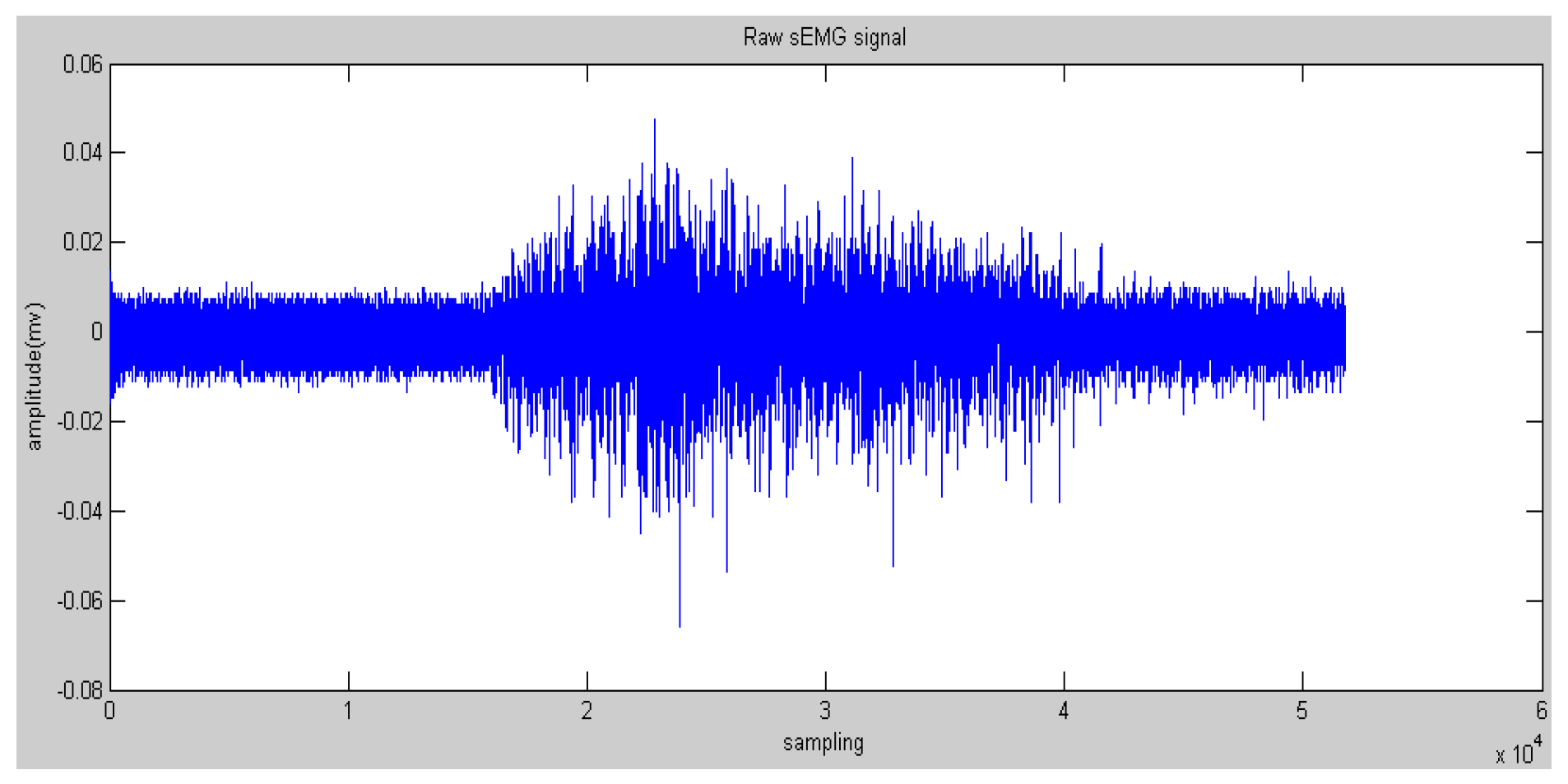
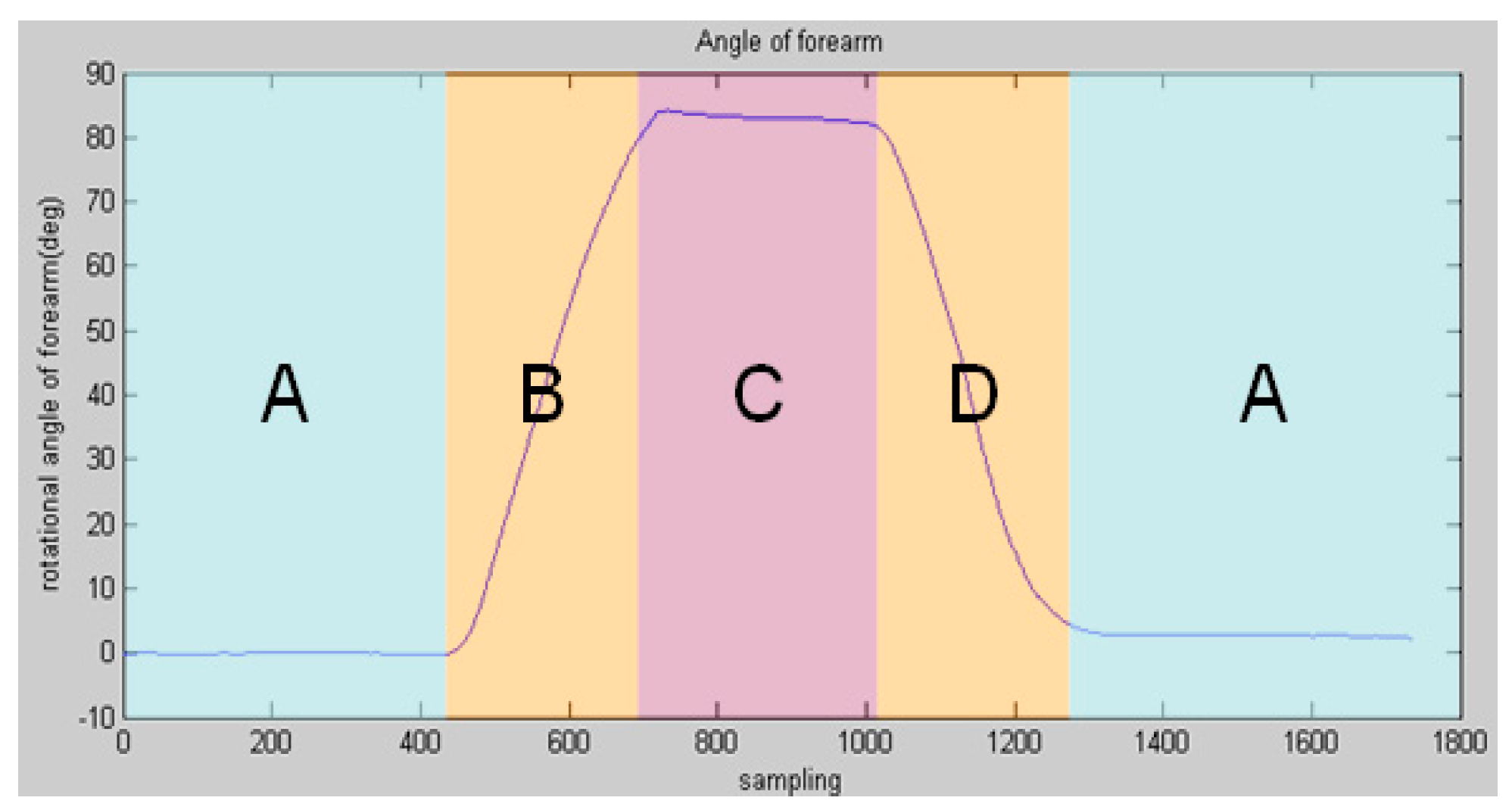
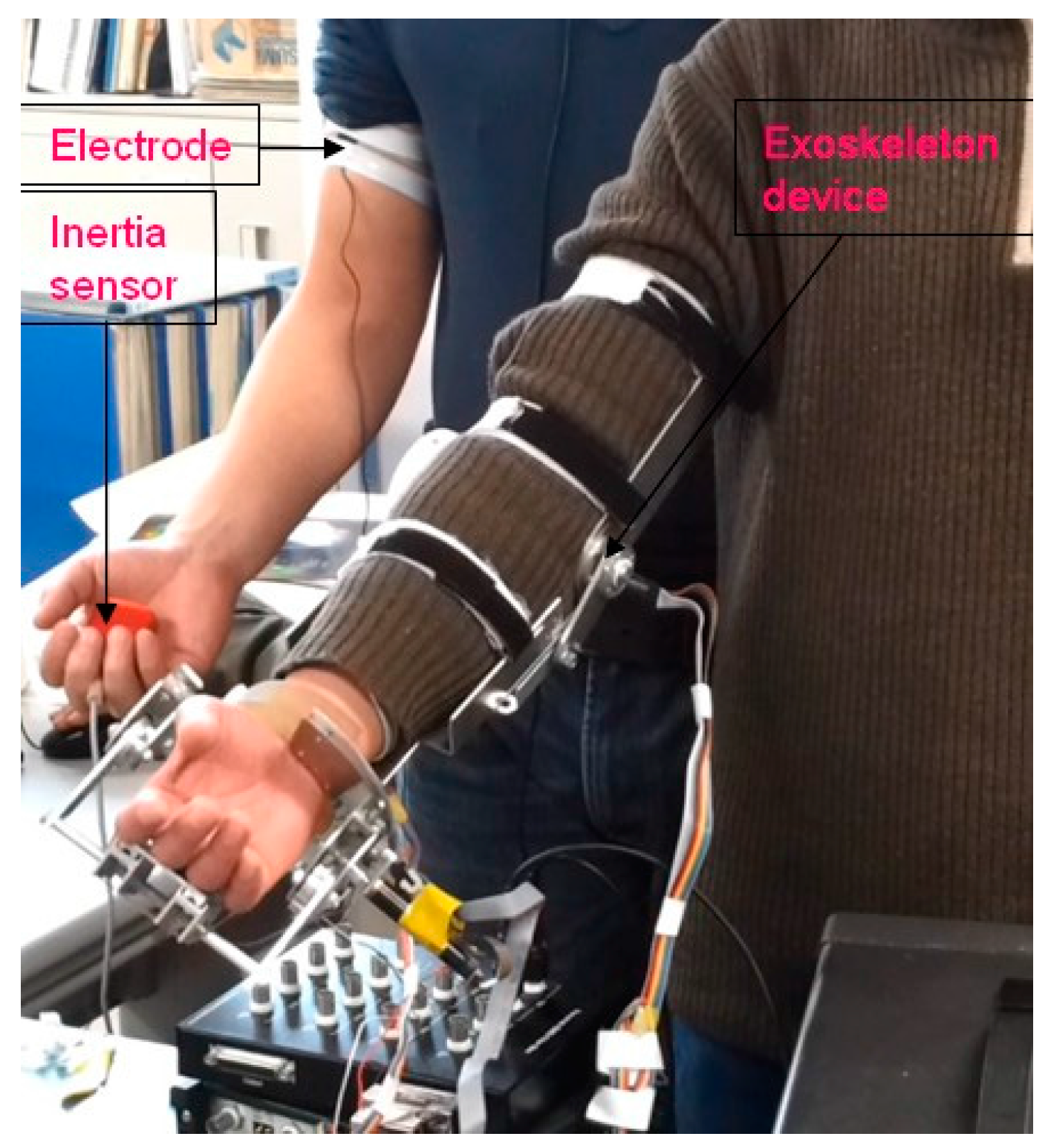
2.1. SEMG Signal Acquisition and Experiments
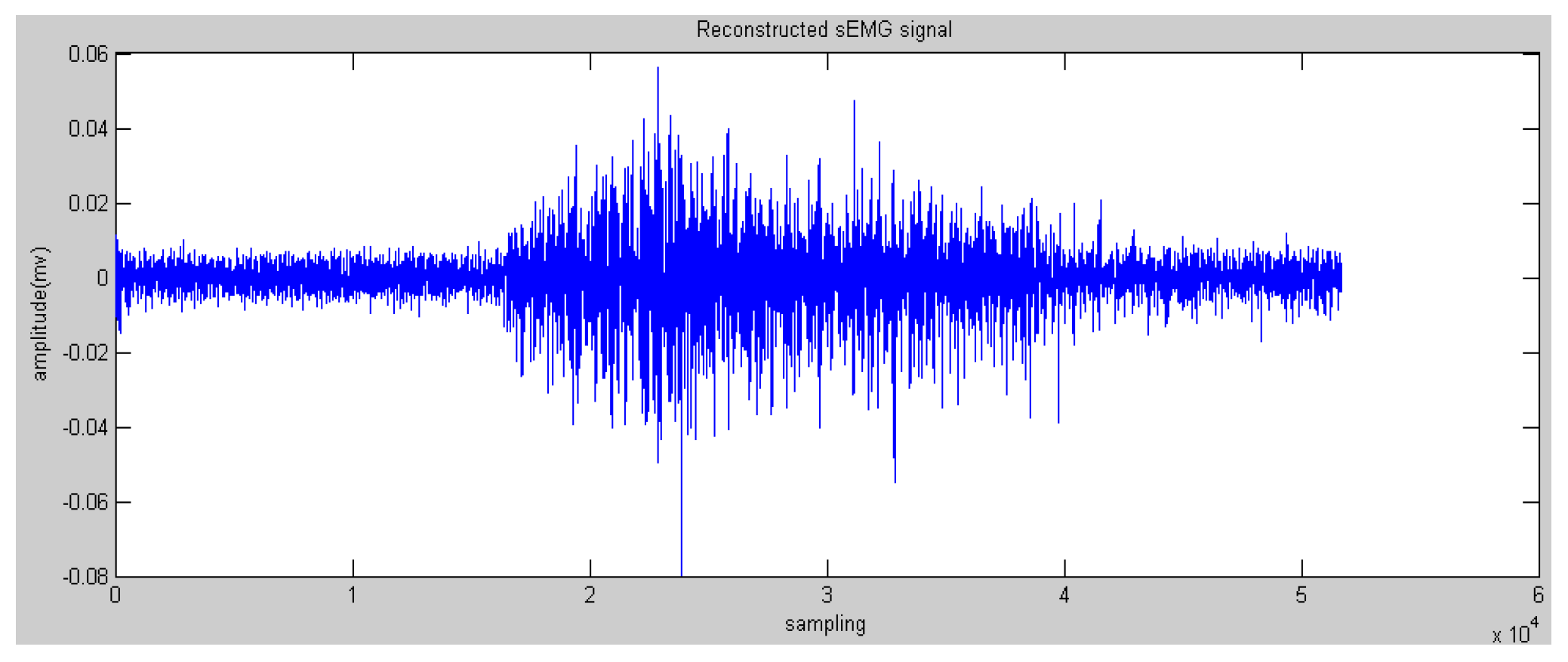
2.2. Wavelet Packet Transform (WPT)
2.3. Feature Extraction Methods
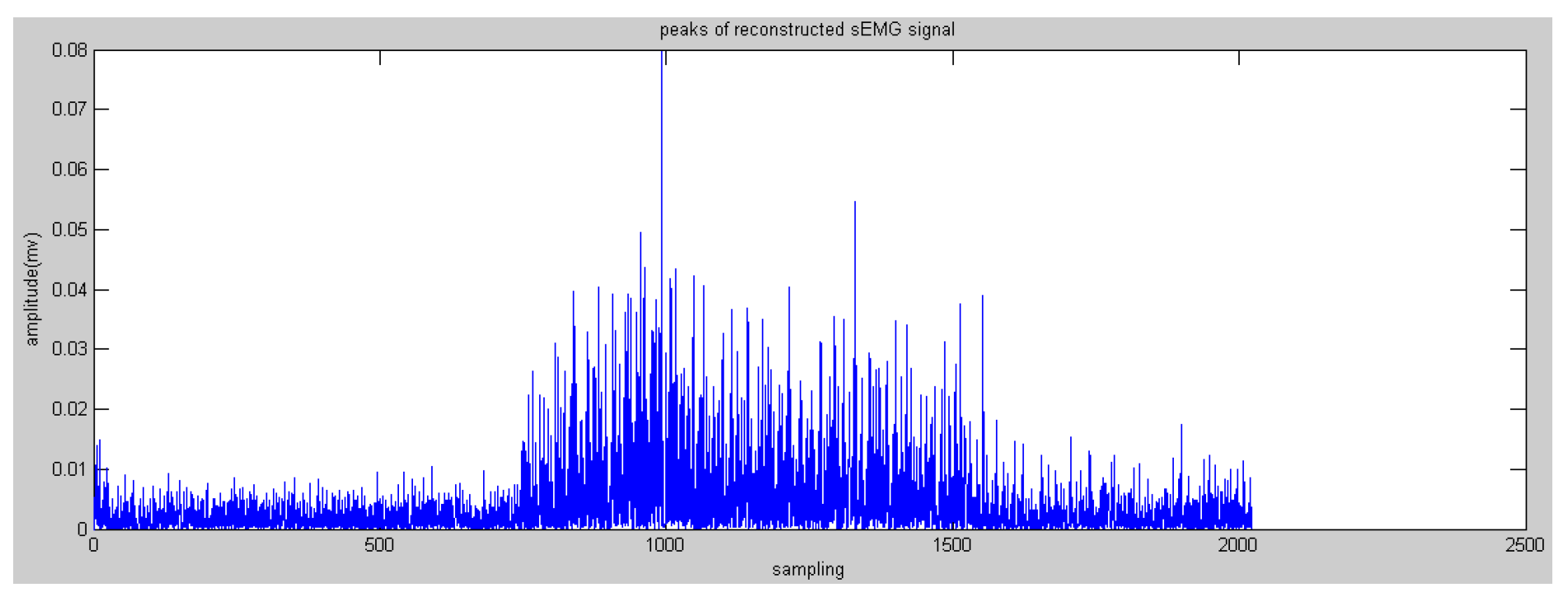
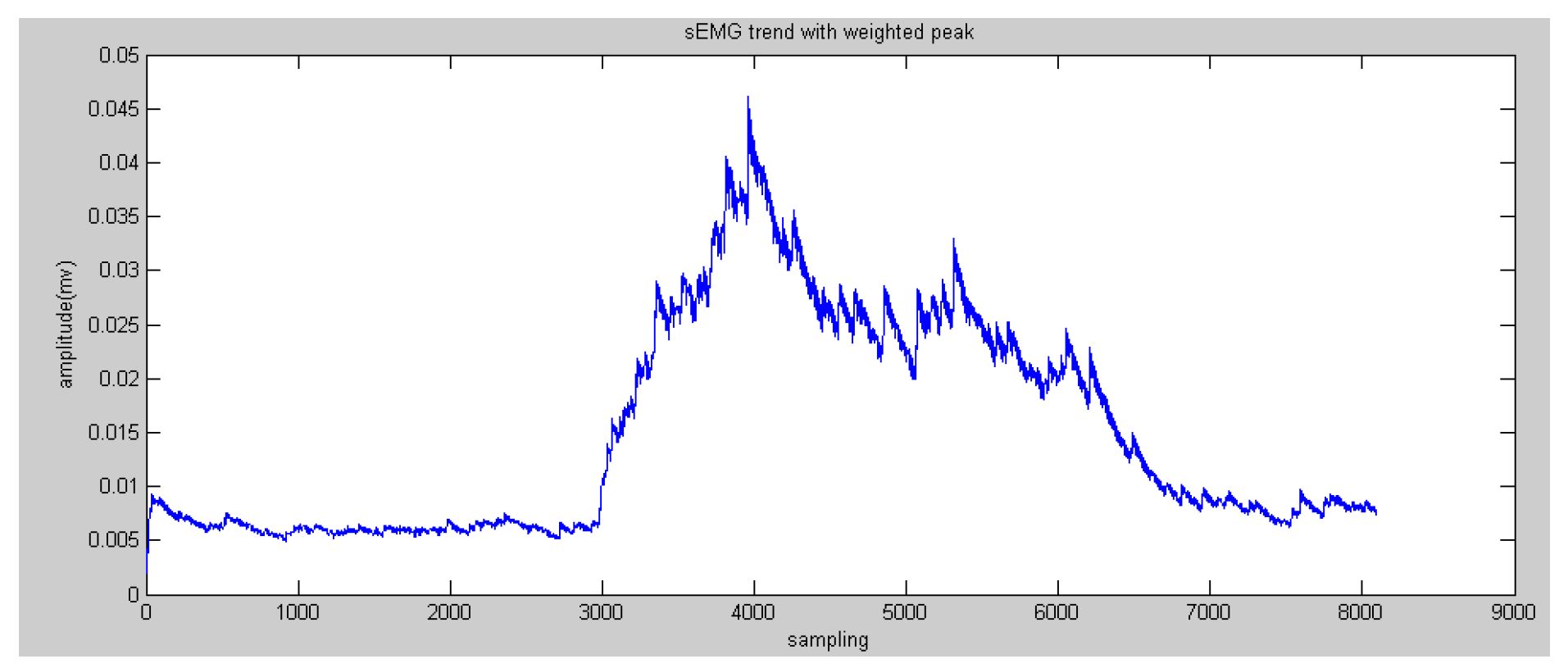
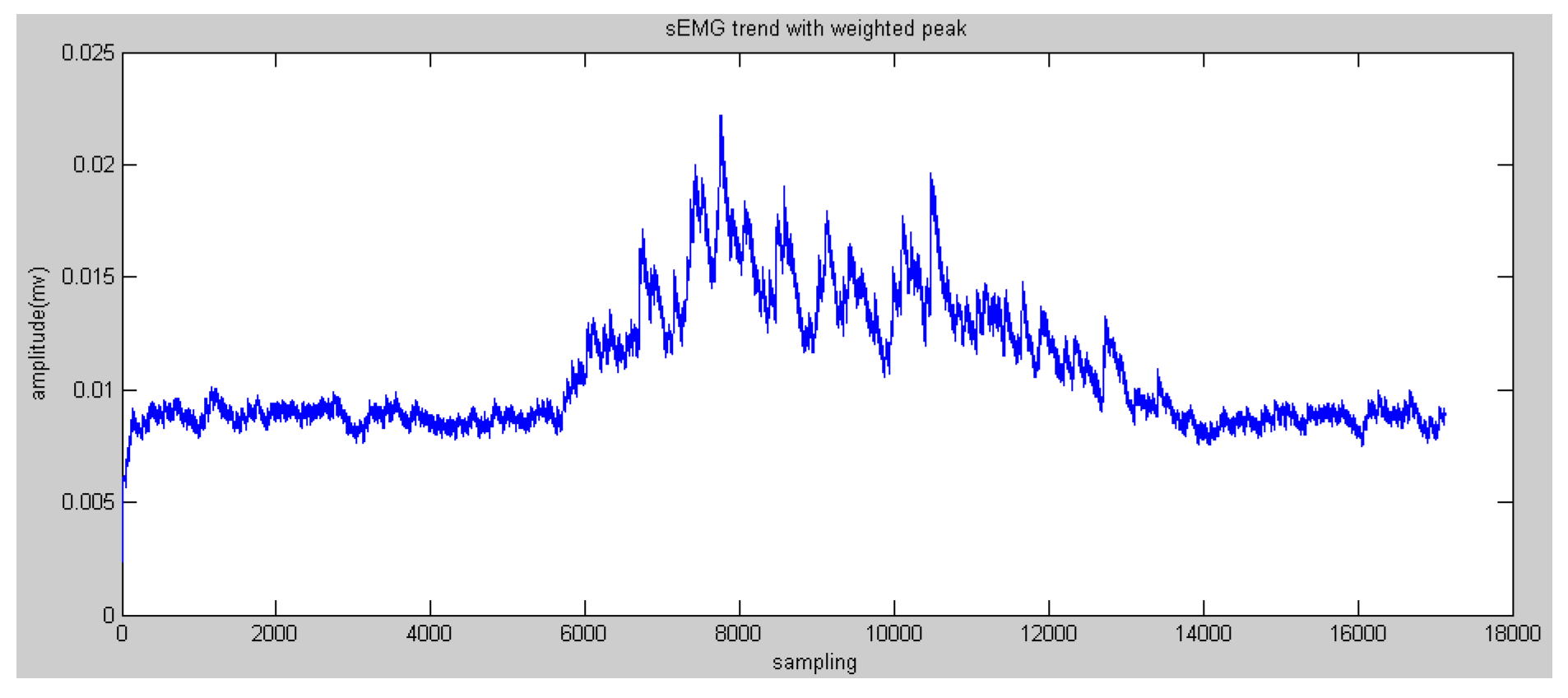
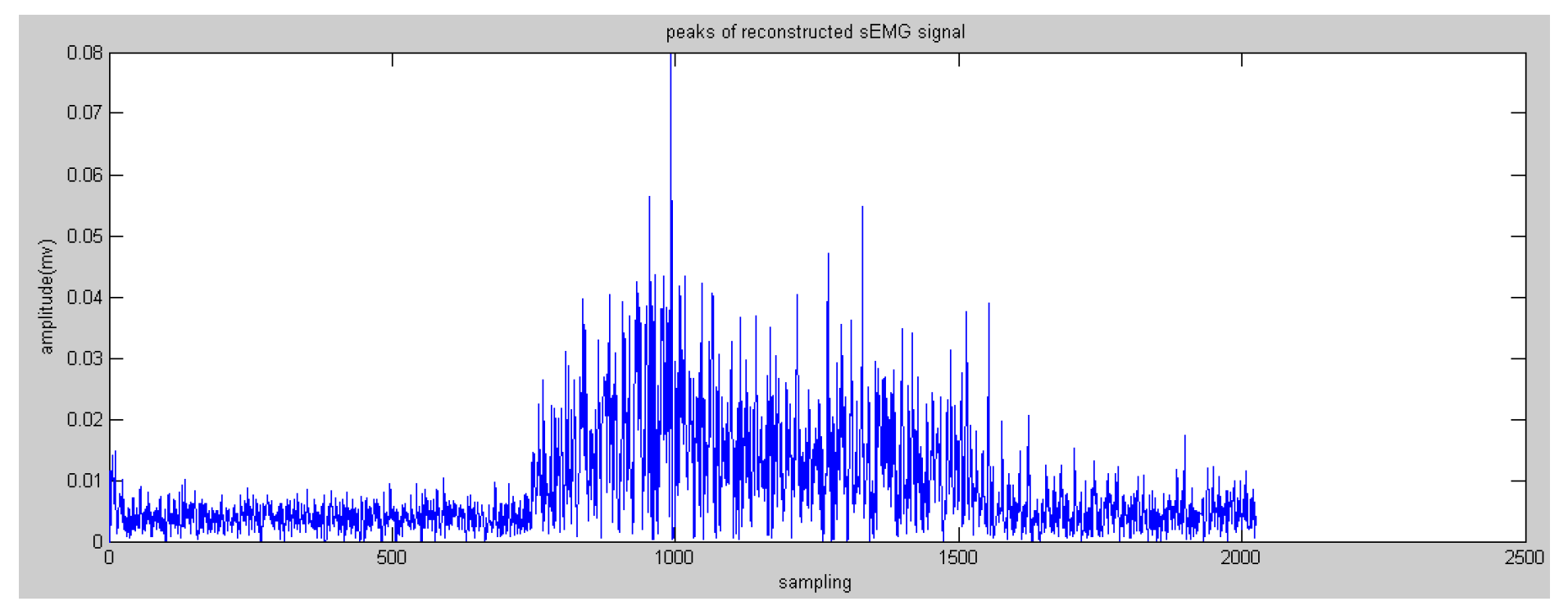
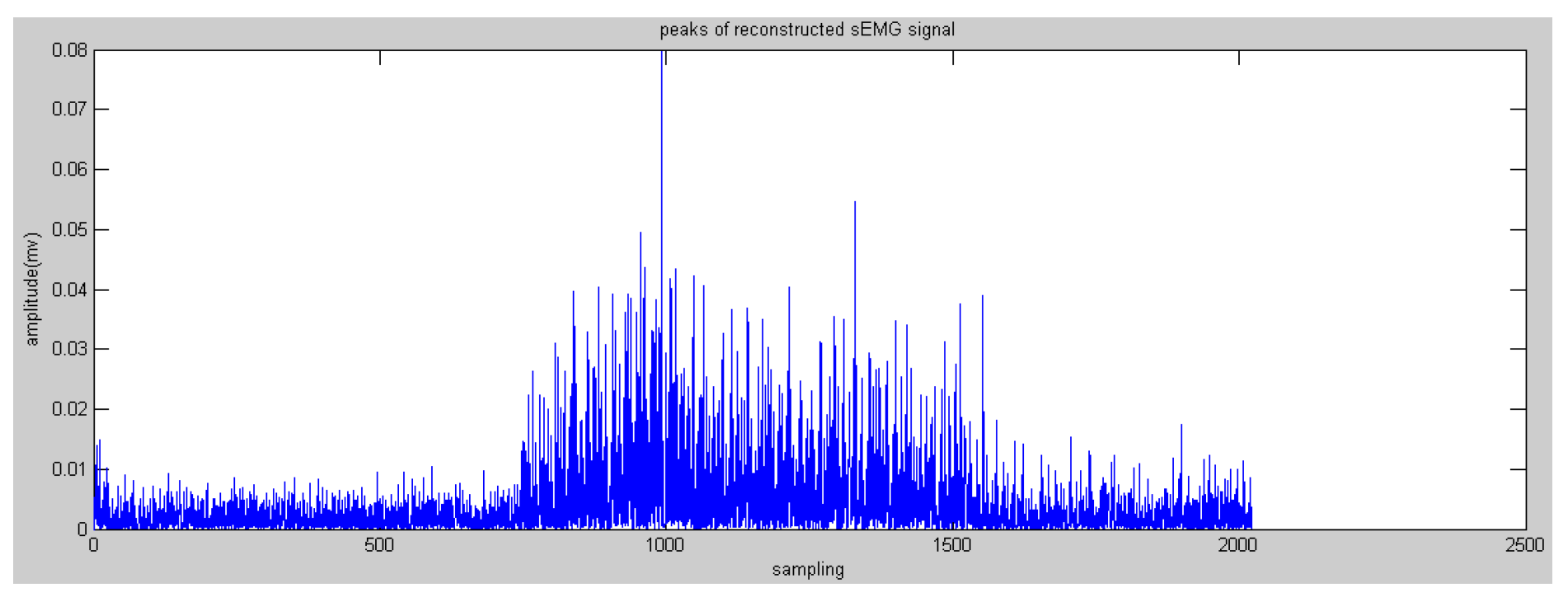
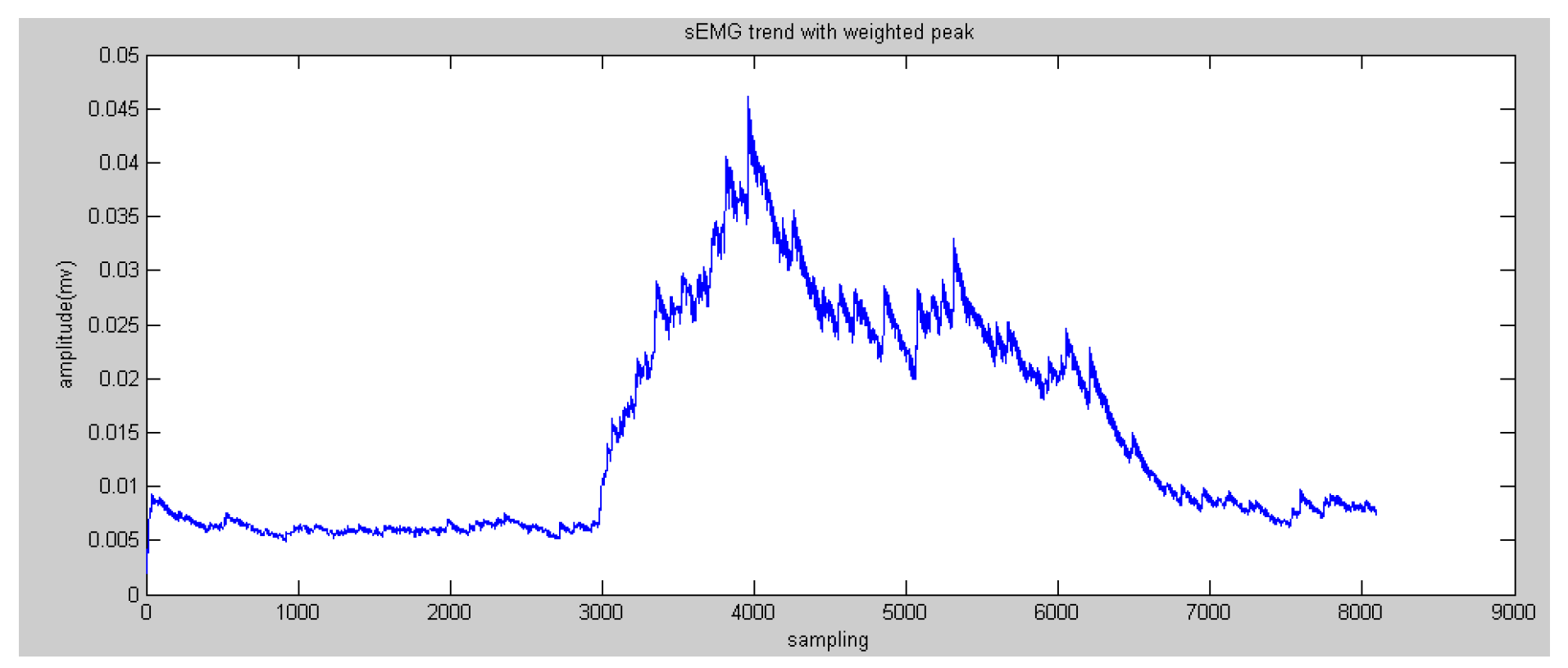
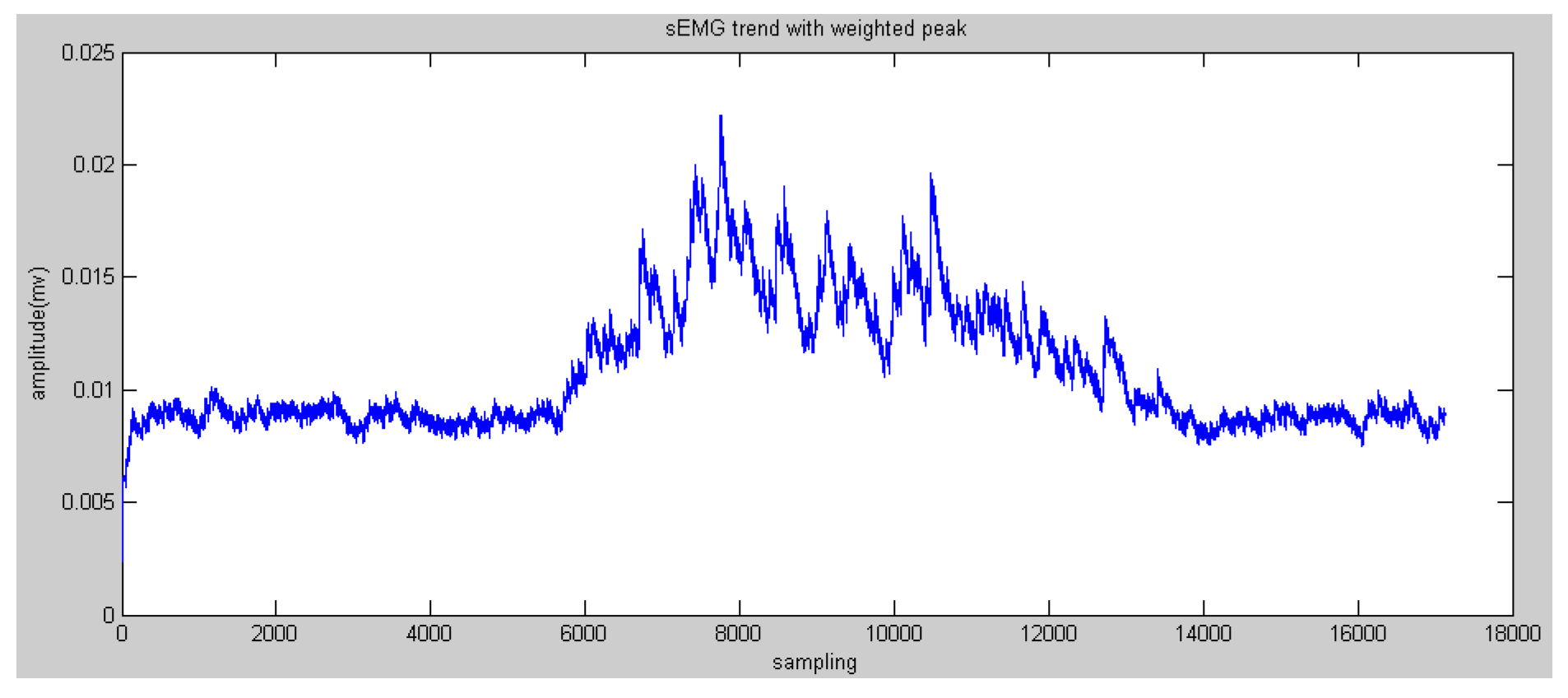
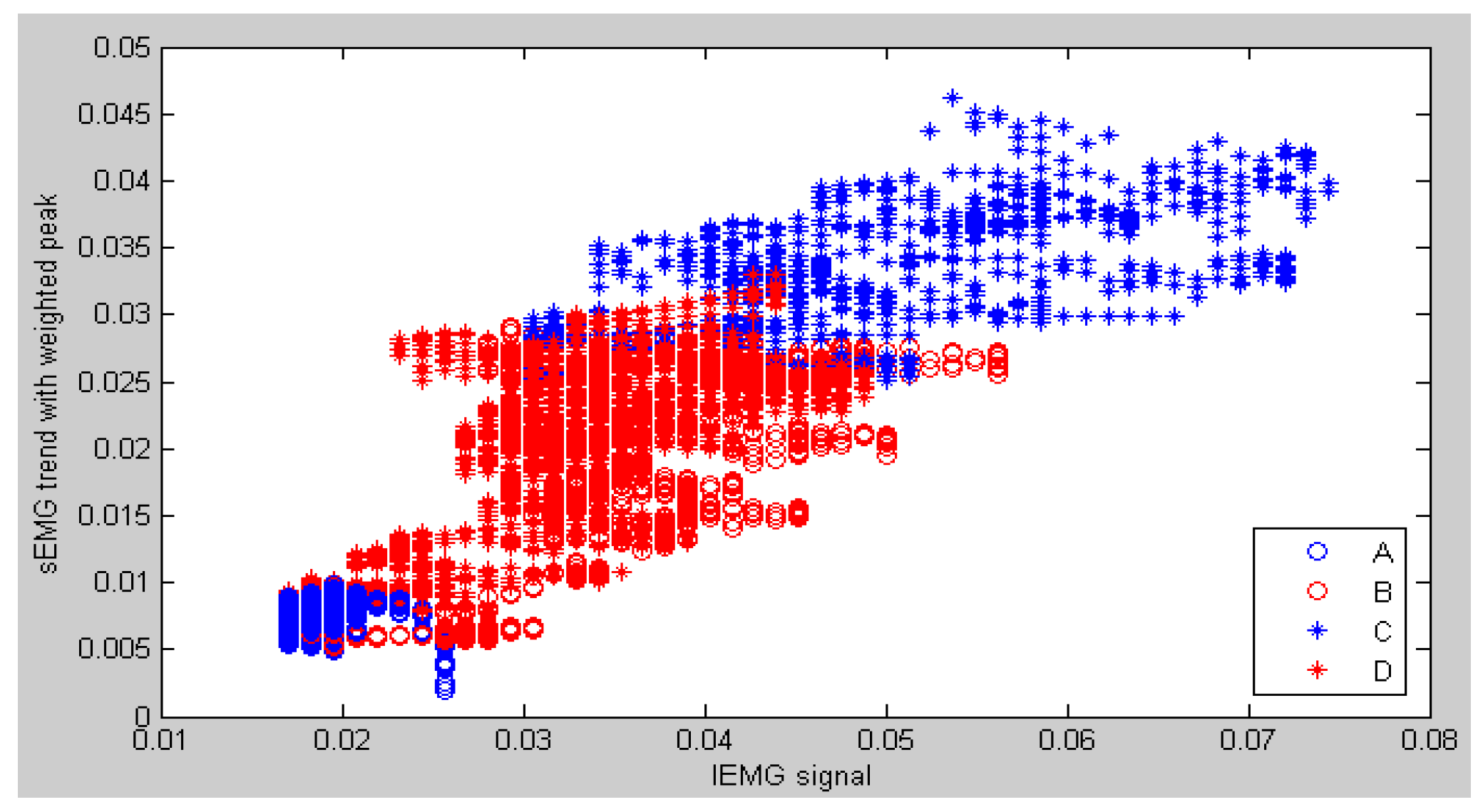
2.4. Weighted Peaks
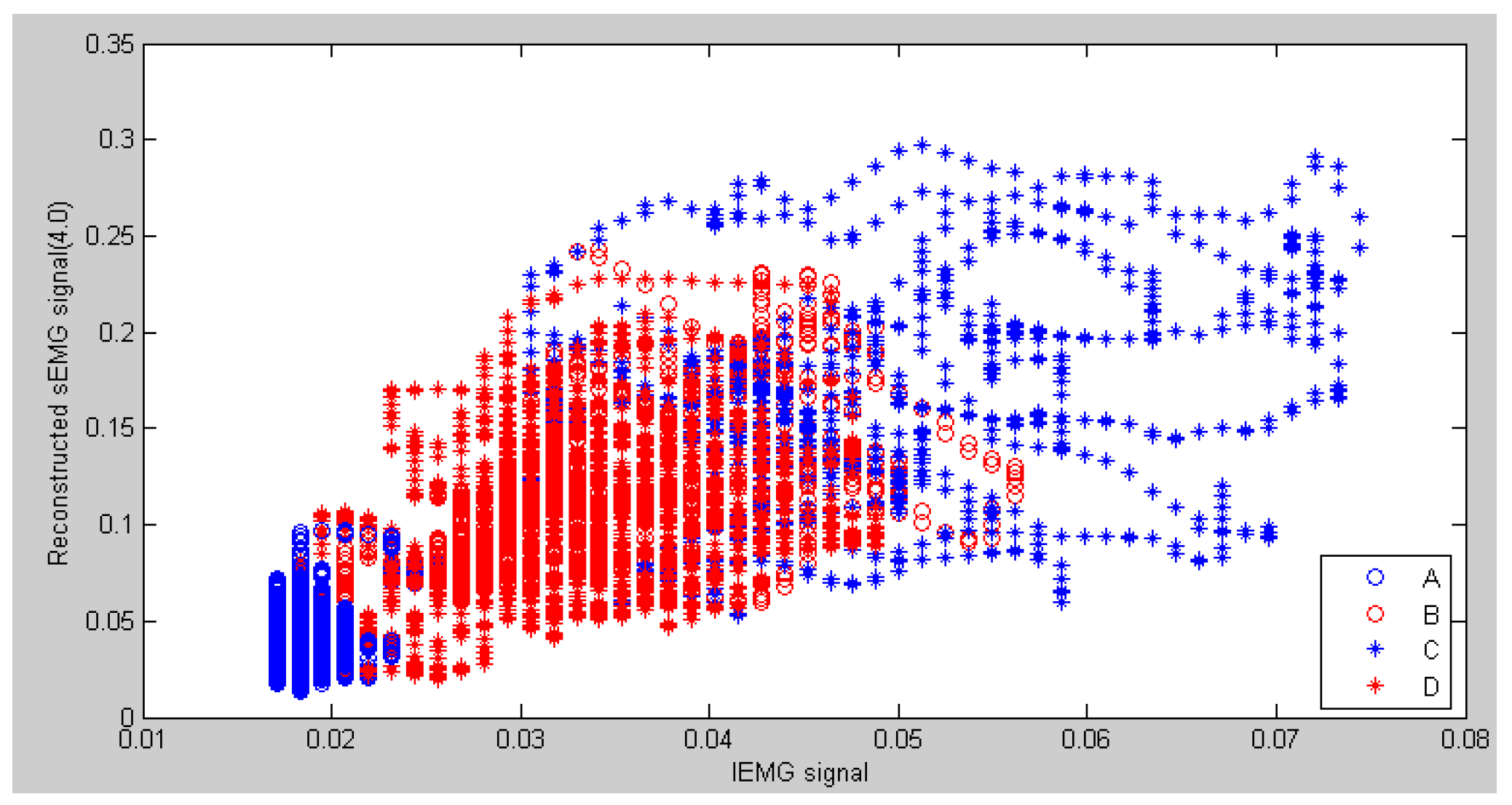
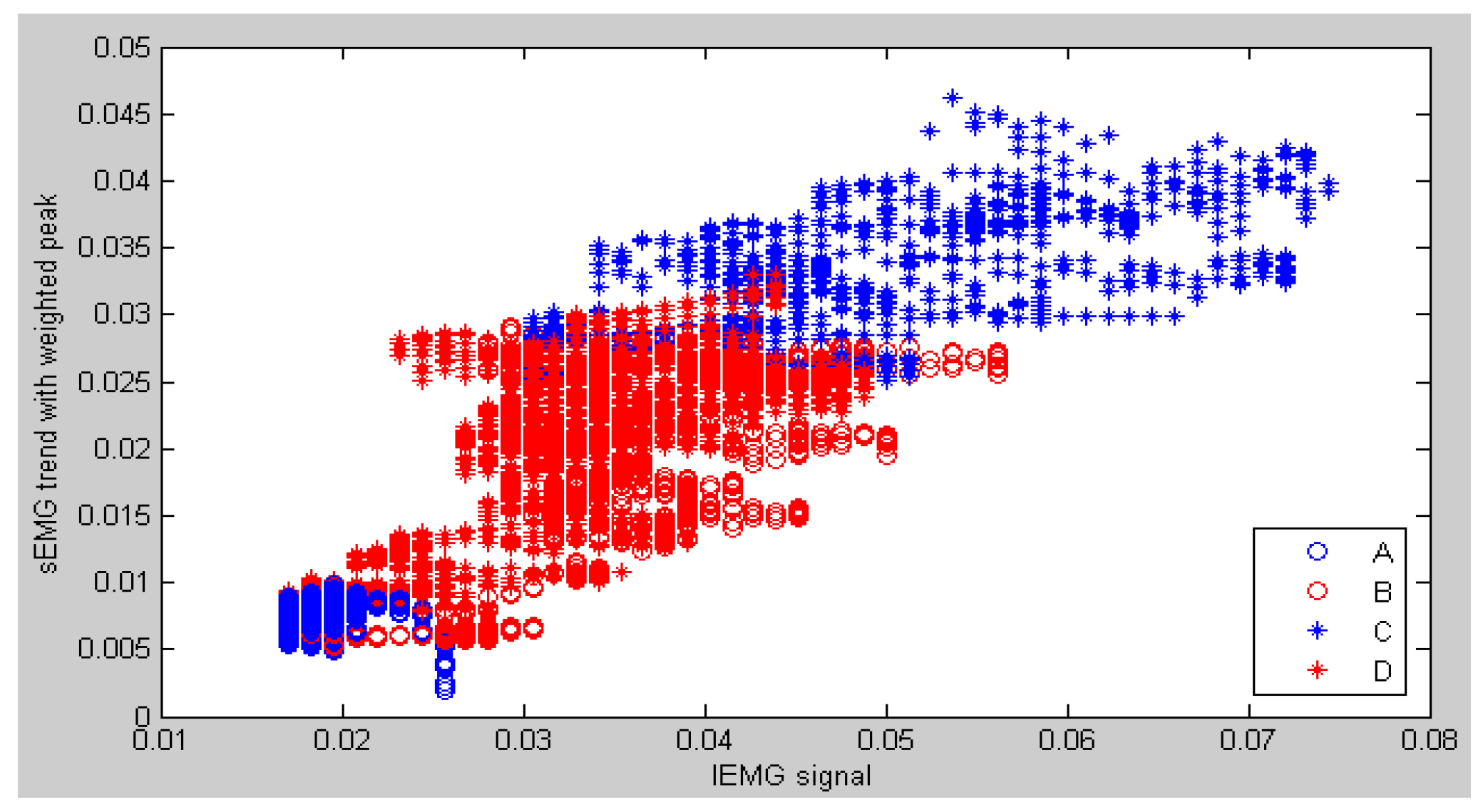
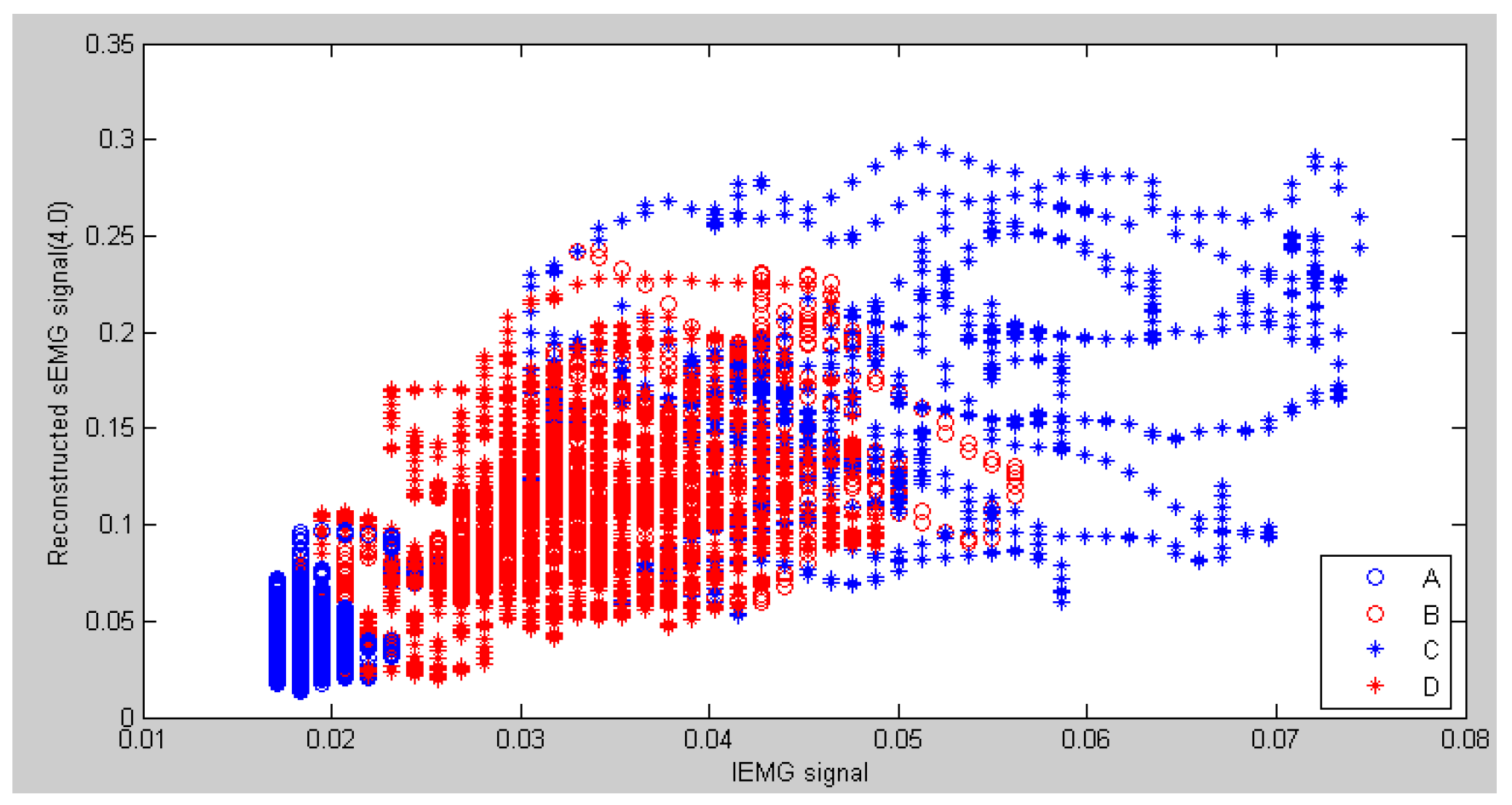
2.5. Comparison of Features Extracted by the Proposed Methods and Traditional Methods
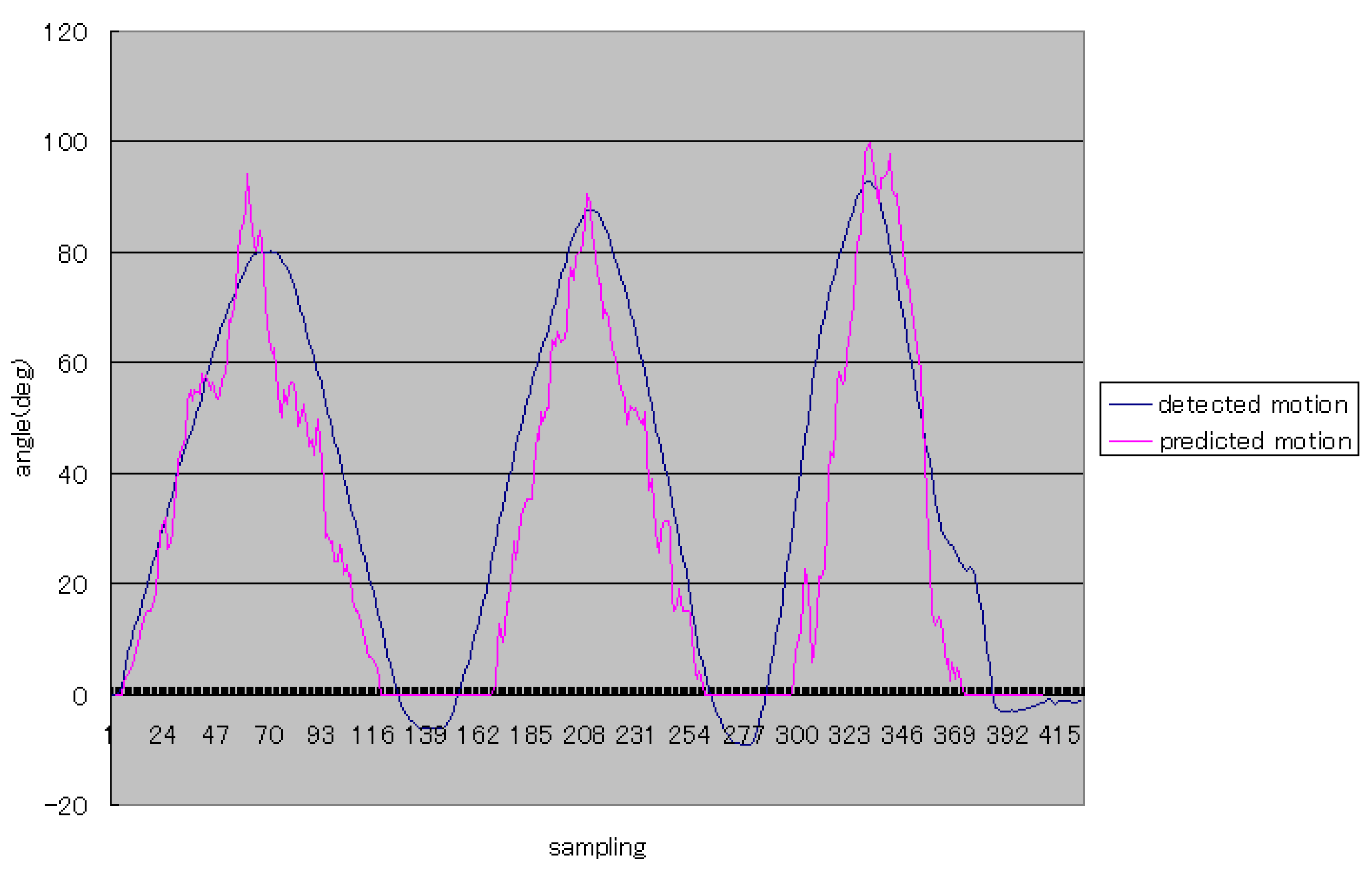
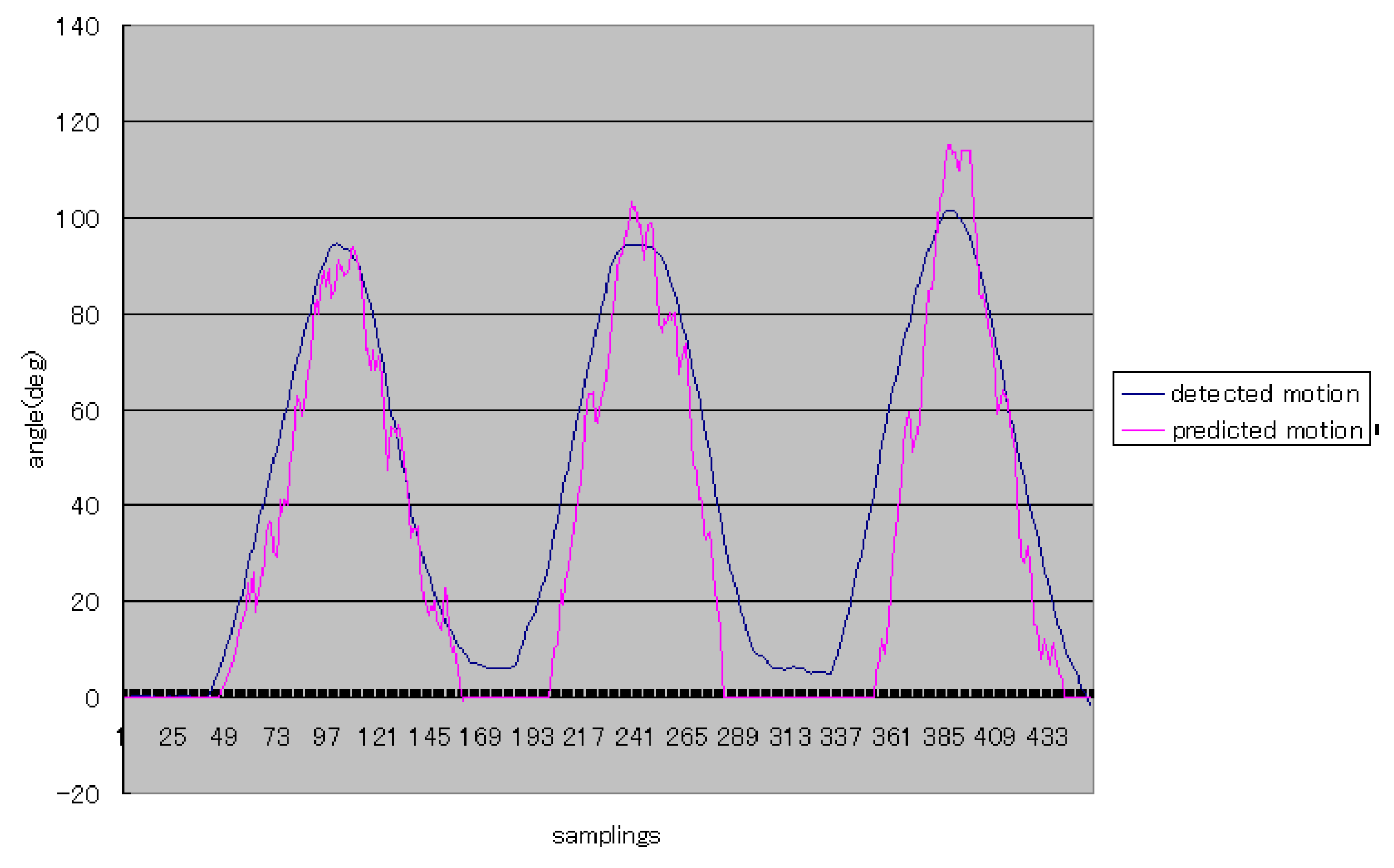
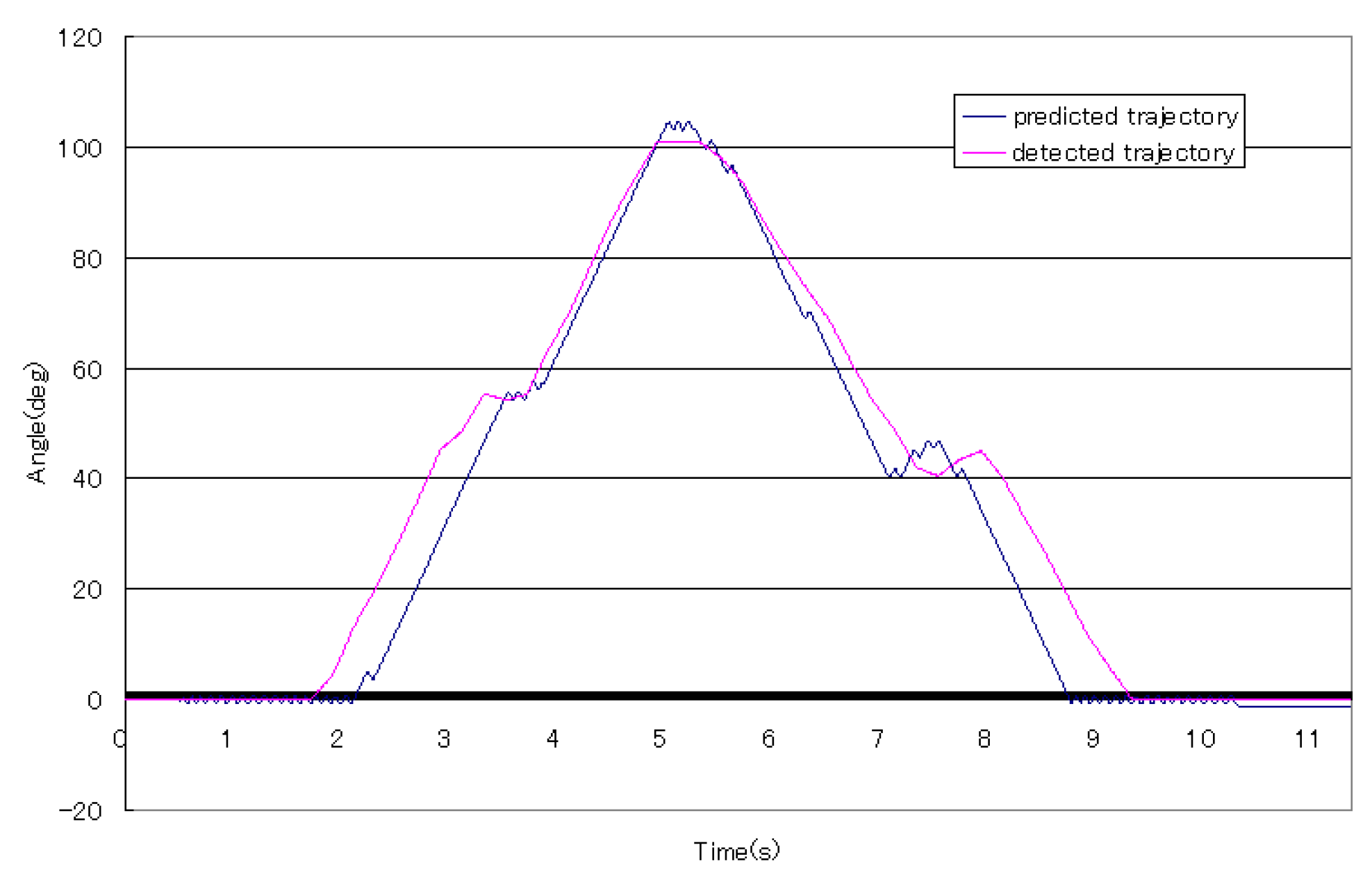
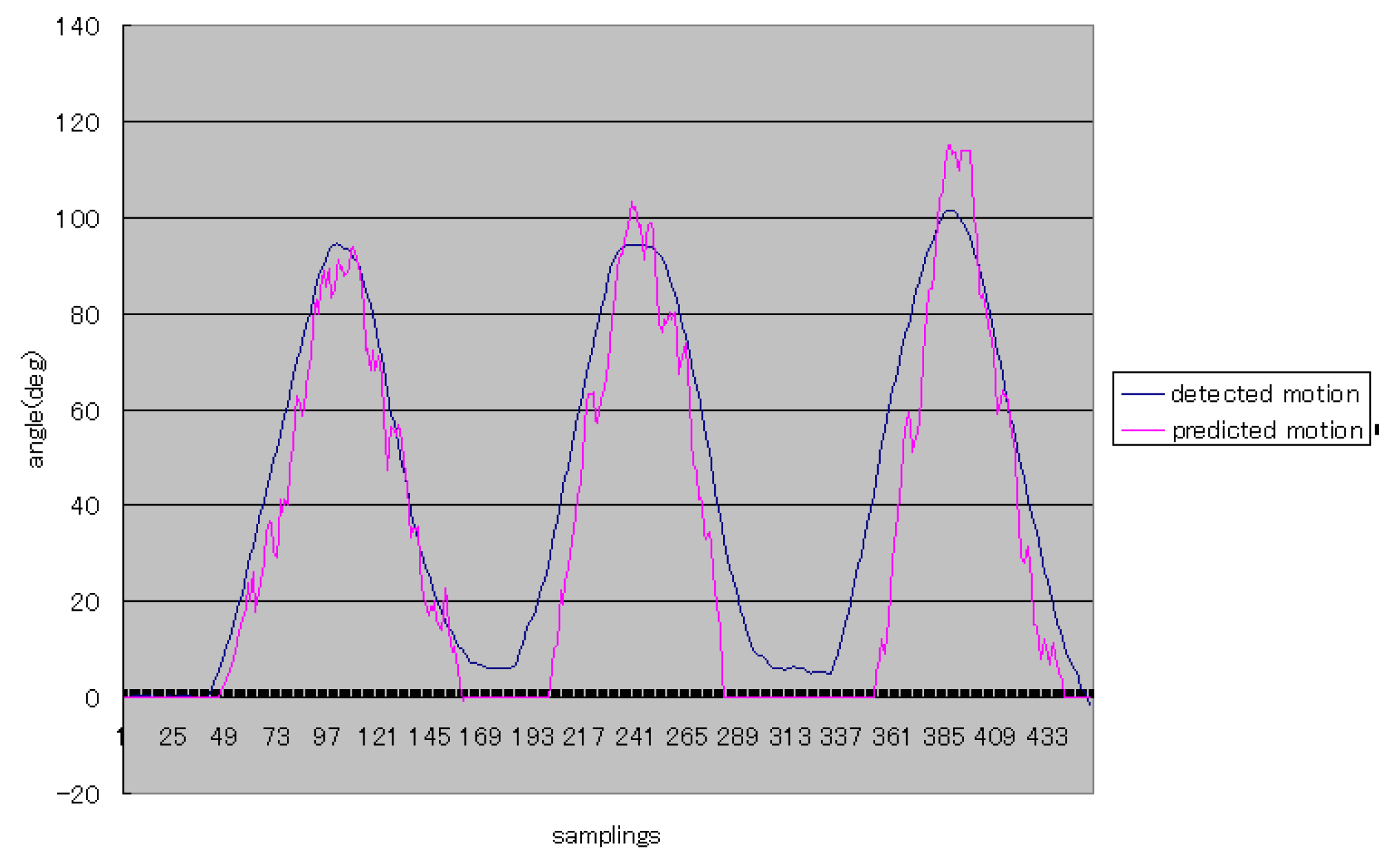
2.6. Linear Map from sEMG Signals to Forearm Motion
3. Experiments and Results
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| SEMG | Surface Electromyography |
| WPT | Wavelet Packet Transform |
| IEMG | Integrated Electromyography |
| MAV | Mean Absolute Value |
References
- Searles, J.W.; Avodele, L.; Kuhlmann, G.L. Acute Ischemic Stroke; Technical Report 2009; Decision Resources: Burlington, MA, USA, 2009. [Google Scholar]
- Loureiro, R.C.; Harwin, W.S.; Nagai, K.; Johnson, M. Advances in upper limb stroke rehabilitation: A technology push. Med. Biol. Eng. Comput. 2011, 49, 1103–1118. [Google Scholar] [CrossRef] [PubMed]
- Masiero, S.; Carraro, E.; Ferraro, C.; Gallina, P.; Rossi, A.; Rosati, G. Upper limb rehabilitation robotics after stroke: A perspective from the University of Padua, Italy. J. Rehabil. Med. 2009, 41, 981–985. [Google Scholar] [CrossRef] [PubMed]
- Lum, P.S.; Burgar, C.G.; Van der Loos, M.; Shor, P.C.; Majmundar, M.; Yap, R. MIME robotic device for upper-limb neurorehabilitation in subacute stroke subjects: A follow-up study. J. Rehabil. Res. Dev. 2006, 43, 631–642. [Google Scholar] [CrossRef] [PubMed]
- Taub, E. Harnessing brain plasticity through behavioural techniques to produce new treatments in neurorehabilitation. Am. Psychol. 2004, 59, 692–704. [Google Scholar] [CrossRef] [PubMed]
- Chang, K.-M.; Liu, S.-H.; Wu, X.-H. A wireless sEMG recording system and its application to muscle fatigue detection. Sensors 2012, 12, 489–499. [Google Scholar] [CrossRef] [PubMed]
- Zecca, M.; Micera, S.; Carrozza, M.C.; Dario, P. Control of multifunctional prosthetic hands by processing the electromyographic signals. Crit. Rev. Biomed. Eng. 2002, 30, 459–468. [Google Scholar] [CrossRef]
- Phinyomark, A.; Limsakul, C.; Phukpattaranont, P. A novel feature extraction for robust EMG pattern recognition. J. Comput. 2009, 1, 71–80. [Google Scholar]
- Jiang, M.W.; Wang, R.C.; Wang, J.Z.; Jin, D.W. A method of recognizing finger motion using wavelet transform of surface EMG signals. In Proceedings of the 2005 27th Annual Conference of the IEEE Engineering in Medicine and Biology Society, Shanghai, China, 17–18 January 2005; pp. 2672–2674.
- Kumar, S.; Prasad, N. Torso muscle EMG profile differences between patients of back pain and control. Clin. Biomech. 2010, 25, 103–109. [Google Scholar] [CrossRef] [PubMed]
- Kumar, D.K.; Pah, N.D.; Bradley, A. Wavelet analysis of surface electromyography to determine muscle fatigue. IEEE Trans. Neural Syst. Rehabil. Eng. 2003, 11, 400–406. [Google Scholar] [CrossRef] [PubMed]
- Delis, A.L.; Carvalho, J.L.A.; Rocha, A.F.D.; Ferreira, R.U.; Rodrigues, S.S.; Borges, G.A. Estimation of the knee joint angle from surface electromyographic signals for active control of leg prostheses. Phys. Meas. 2009, 30, 931–946. [Google Scholar] [CrossRef] [PubMed]
- Hussain, M.S.; Reaz, M.B.I.; Mohd-Yasin, F.; Ibrahimy, M.I. Electromyography signal analysis using wavelet transform and higher order statistics to determine muscle contraction. Expert Syst. 2009, 26, 35–48. [Google Scholar] [CrossRef]
- Saevarsson, G.; Sveinsson, J.R.; Benediktsson, J.A. Wavelet-packet transformation as a preprocessor of EEG waveforms for classification. In Proceedings of the 19th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Chicago, IL, USA, 30 October–2 November 1997; pp. 1305–1308.
- Song, Z.; Guo, S. Design process of a novel exoskeleton rehabilitation device and implementation of bilateral upper limb motor movement. J. Med. Biol. Eng. 2014, 34, 188–196. [Google Scholar] [CrossRef]
- Song, Z.; Guo, S.; Fu, Y. Development of an upper extremity motor function rehabilitation system and an assessment system. Int. J. Mechatron. Autom. 2011, 1, 19–28. [Google Scholar] [CrossRef]
- Pang, M.; Guo, S.; Song, Z. Study on the sEMG driven upper limb exoskeleton rehabilitation device in bilateral rehabilitation. J. Robot. Mechatron. 2014, 24, 585–594. [Google Scholar]
- Song, Z.; Guo, S.; Pang, M.; Zhang, S. Recognition of motion of human upper limb using SEMG in real-time: Towards bilateral rehabilitation. In Proceedings of the 2012 IEEE International Conference on Robotics and Biomimetics, Guangzhou, China, 11–14 December 2012; pp. 1404–1408.
- Chu, J.U.; Moon, I.; Mun, M.S. A real-time EMG pattern recognition system based on linear-nonlinear feature projection for a multifunction myoelectric control. IEEE Trans. Biomed. Eng. 2006, 53, 2232–2239. [Google Scholar] [PubMed]
- Mahdi, K.; Mehran, J. Real-time intelligent pattern recognition algorithm for surface EMG. Biomed. Eng. Online 2007. [Google Scholar] [CrossRef]
- Chang, C.C.; Lin, C.J. LIBSVM: A Library for Support Vector Machines; Technical Report 2004; National Taiwan University: Taipei, Taiwan, 2004. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MAV | Weighted Peaks | |
|---|---|---|
| Subject 1 | 85.1 | 93.4 |
| Subject 2 | 86.6 | 95.3 |
| Subject 3 | 79.3 | 87.7 |
| Subject 4 | 81.1 | 89.3 |
| Subject 5 | 81.7 | 91.9 |
| Subject 6 | 80.3 | 87.0 |
| Subject 7 | 77.8 | 84.1 |
| Subject 8 | 79.0 | 90.6 |
| Subject 9 | 80.3 | 89.1 |
| Subject 10 | 85.7 | 89.9 |
| Subject 11 | 81.8 | 92.7 |
| Subject 12 | 82.1 | 91.5 |
| Subject 13 | 80.3 | 93.5 |
| Subject 14 | 77.1 | 90.7 |
| Subject 15 | 79.1 | 85.1 |
| Subject 16 | 81.9 | 89.2 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, Z.; Zhang, S. Preliminary Study on Continuous Recognition of Elbow Flexion/Extension Using sEMG Signals for Bilateral Rehabilitation. Sensors 2016, 16, 1739. https://doi.org/10.3390/s16101739
Song Z, Zhang S. Preliminary Study on Continuous Recognition of Elbow Flexion/Extension Using sEMG Signals for Bilateral Rehabilitation. Sensors. 2016; 16(10):1739. https://doi.org/10.3390/s16101739
Chicago/Turabian StyleSong, Zhibin, and Songyuan Zhang. 2016. "Preliminary Study on Continuous Recognition of Elbow Flexion/Extension Using sEMG Signals for Bilateral Rehabilitation" Sensors 16, no. 10: 1739. https://doi.org/10.3390/s16101739