
Effective World Modeling: Multisensor Data Fusion Methodology for Automated Driving

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Work
2.1. Single Sensor State Estimation
2.2. Multisensor Data Fusion
- Low-level sensor data: unprocessed measurement data or features extracted from sensor data are fed to a fusion algorithm
- Tracks estimated by single sensor state estimators are fused.
2.2.1. Multisensor Low-Level Sensor Data Fusion
2.2.2. Multisensor High-Level Sensor Data Fusion
2.3. Data Association
2.4. Multisensor Data Fusion for Automated Driving
2.4.1. Object Existence
2.4.2. Object Representation
2.4.3. Multisensor Data Fusion Architectures in Automated Driving
2.5. Related Work Conclusions
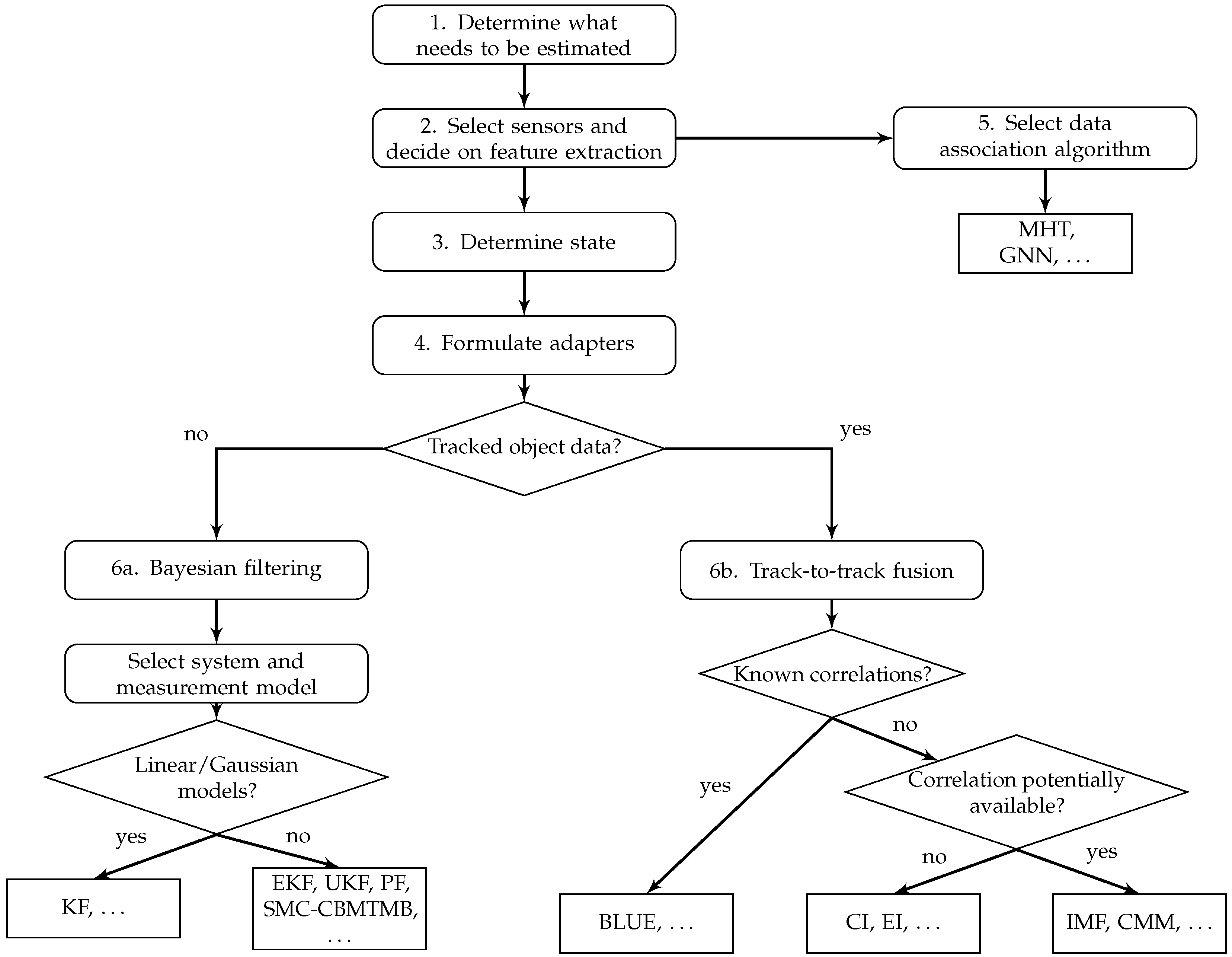
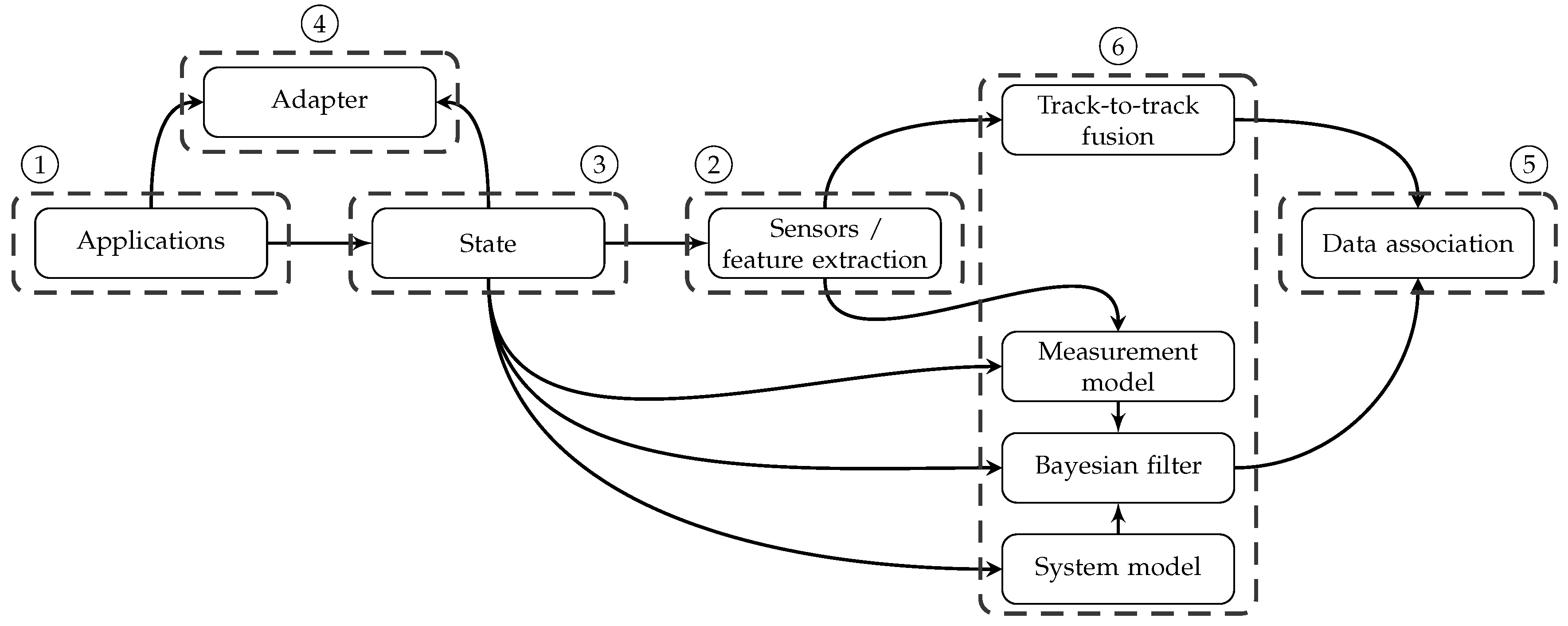
3. Multisensor Data Fusion Methodology
3.1. Step 1: Application-Dependent Output Selection
3.2. Step 2: Sensor Set and Feature Extraction
3.3. Step 3: State Representation
3.4. Step 4: Adapters
3.5. Step 5: Data Association
3.6. Step 6a: State Estimation: Bayesian Filters
3.6.1. System Model
3.6.2. Measurement Model
3.6.3. Bayesian Filter
3.7. Step 6b: State Estimation: Track-To-Track Fusion
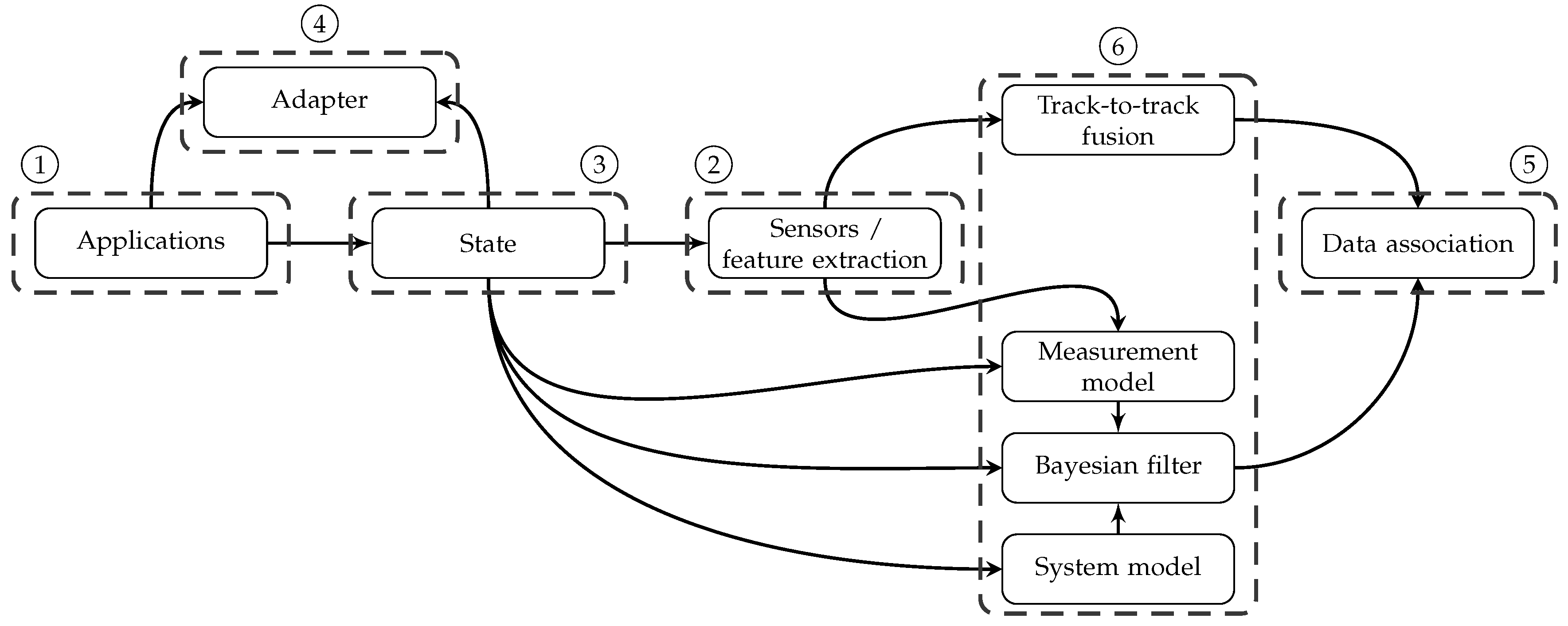
4. Architecture
4.1. Requirements
4.1.1. Dependence versus Independence
4.1.2. Interfaces
4.1.3. Algorithms and Representation
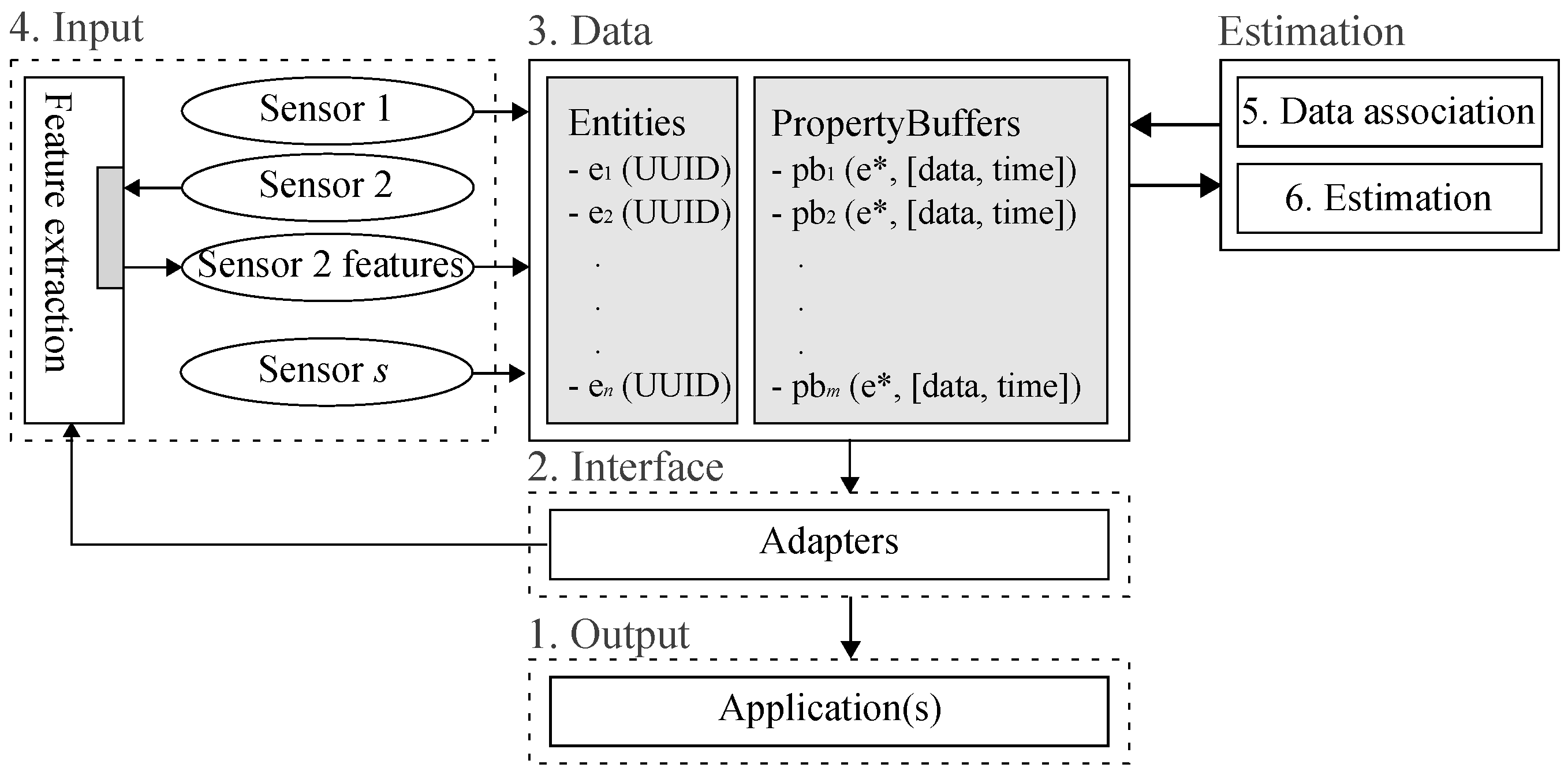
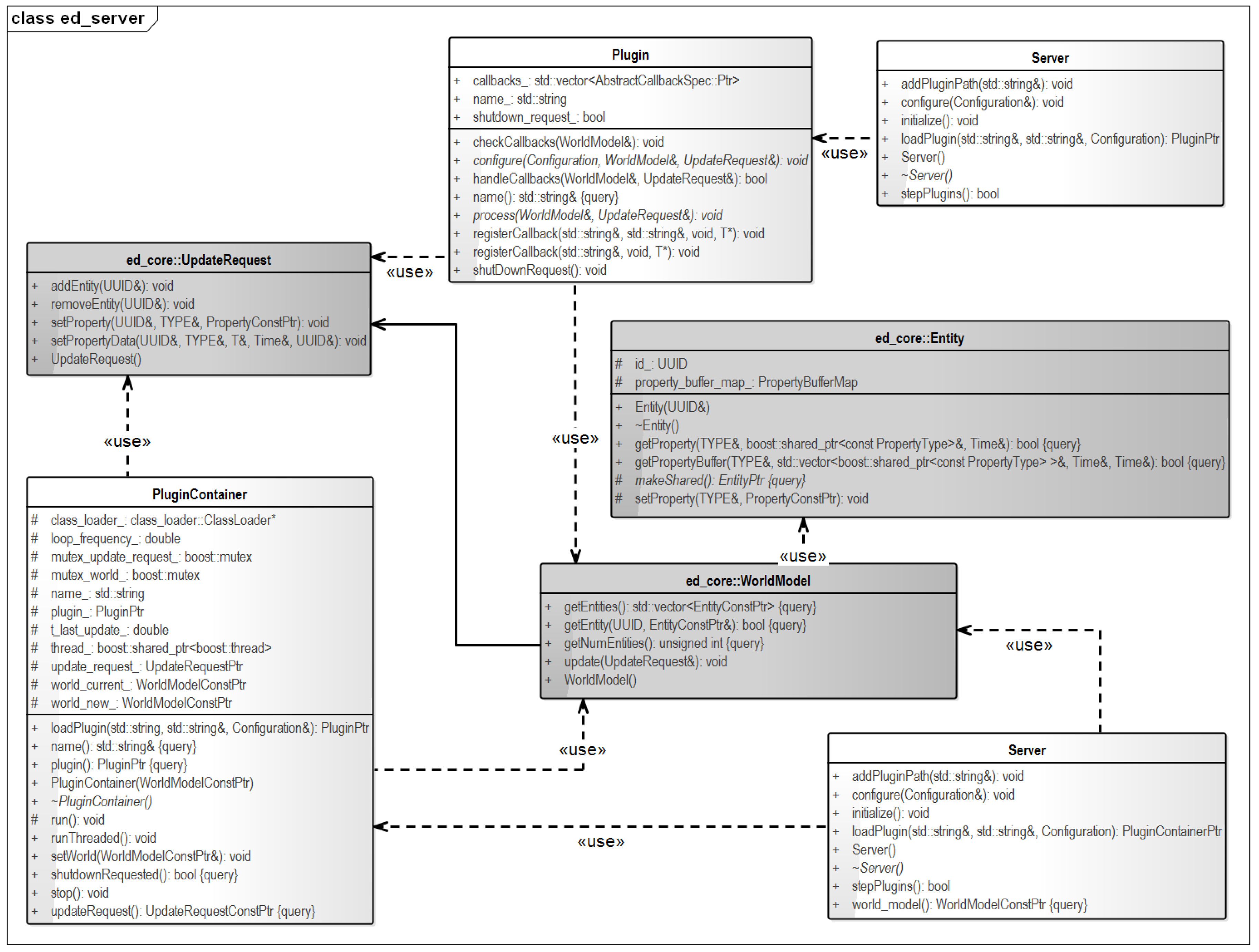
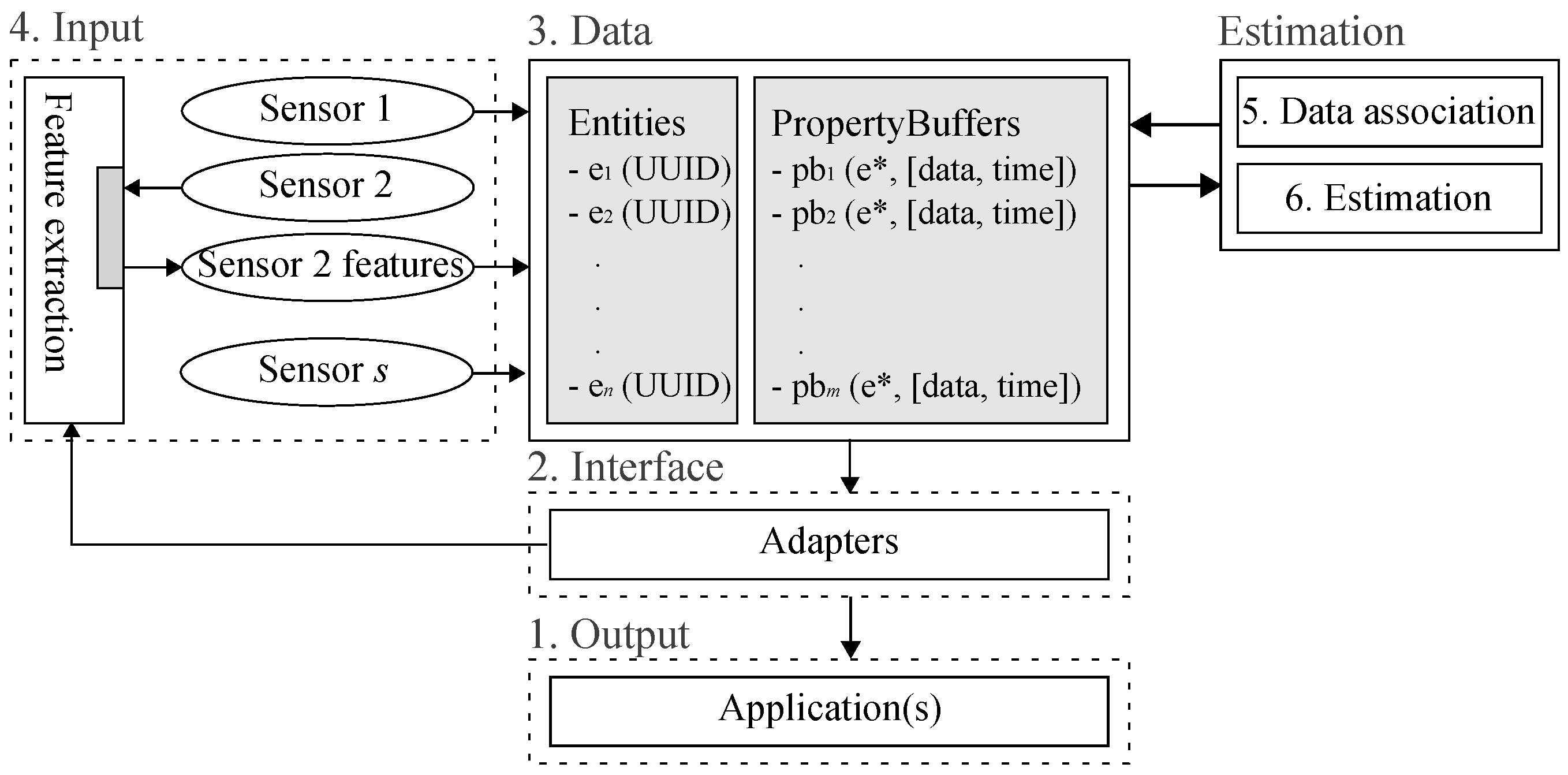
4.2. Software Architecture
4.2.1. Data
4.2.2. Input
4.2.3. Estimation
4.2.4. Interface and Output
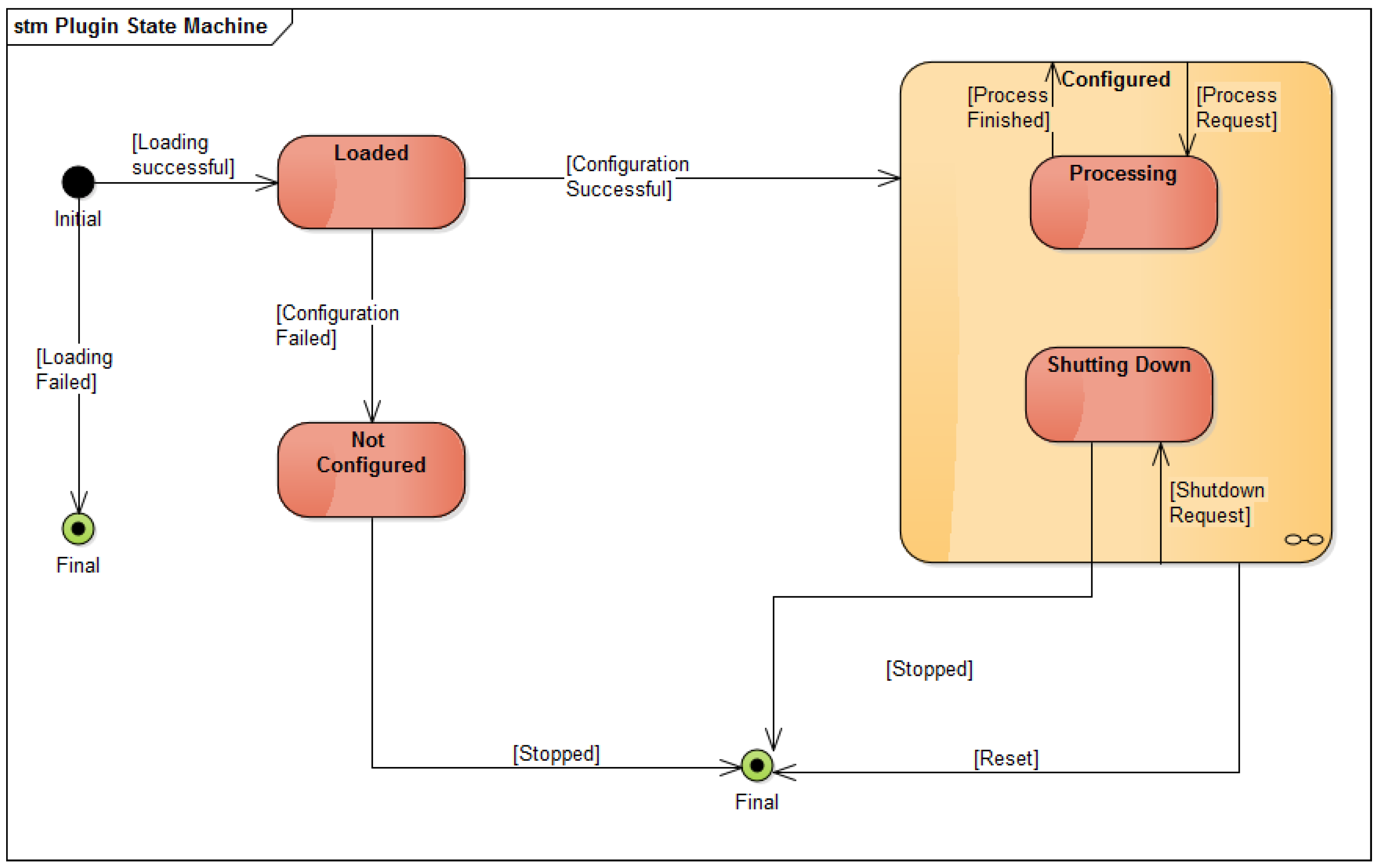
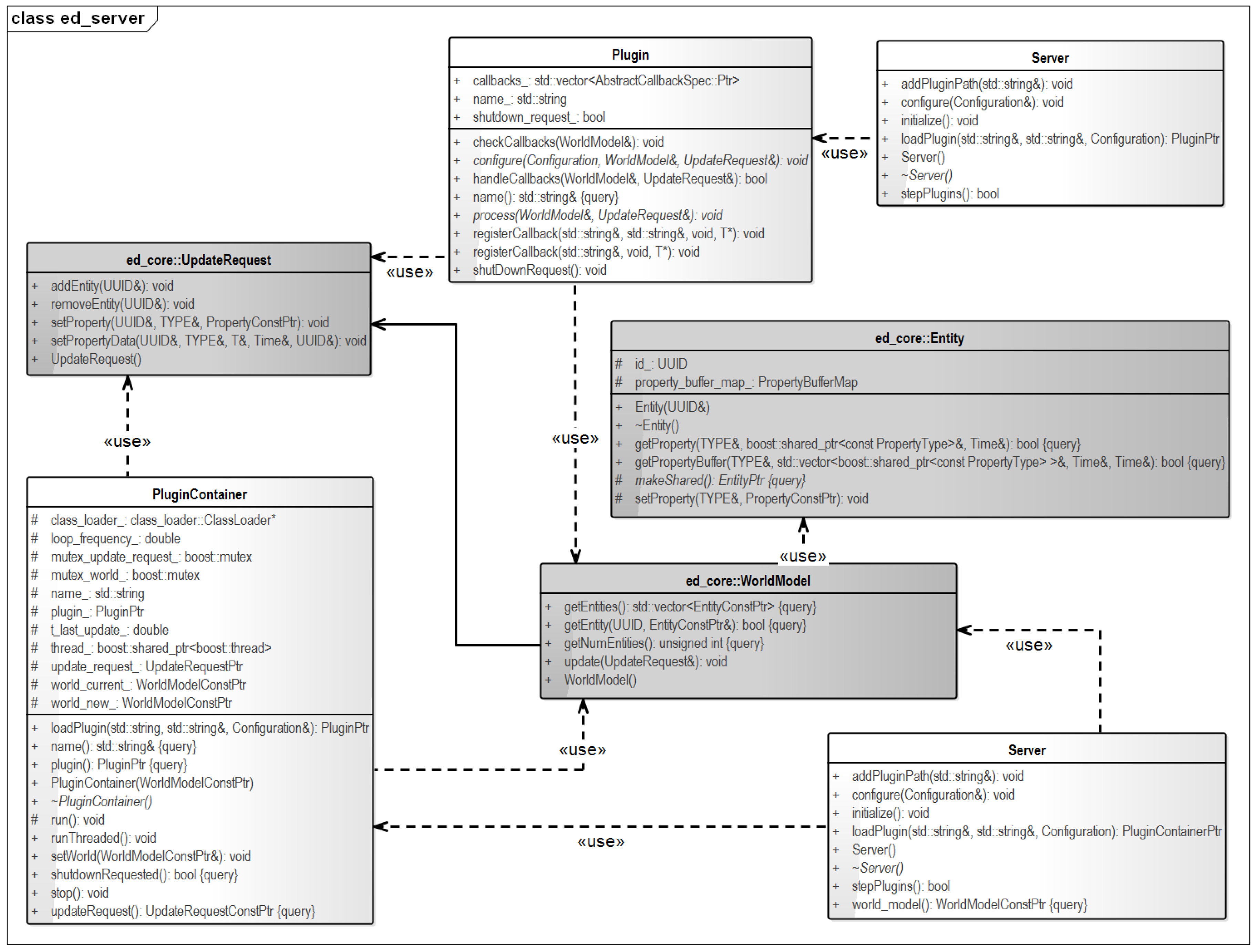
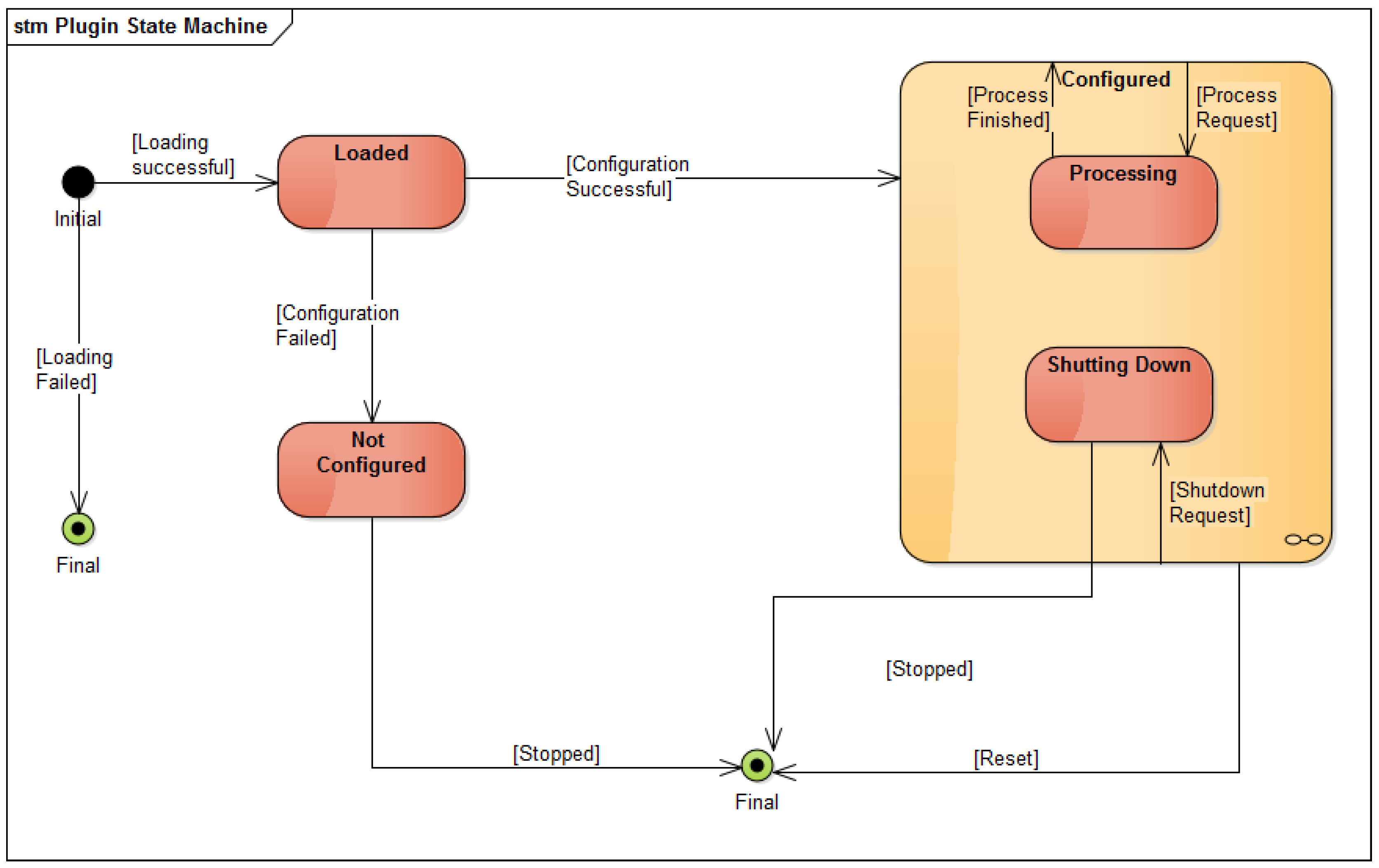
5. Implementation
6. Applications and Results
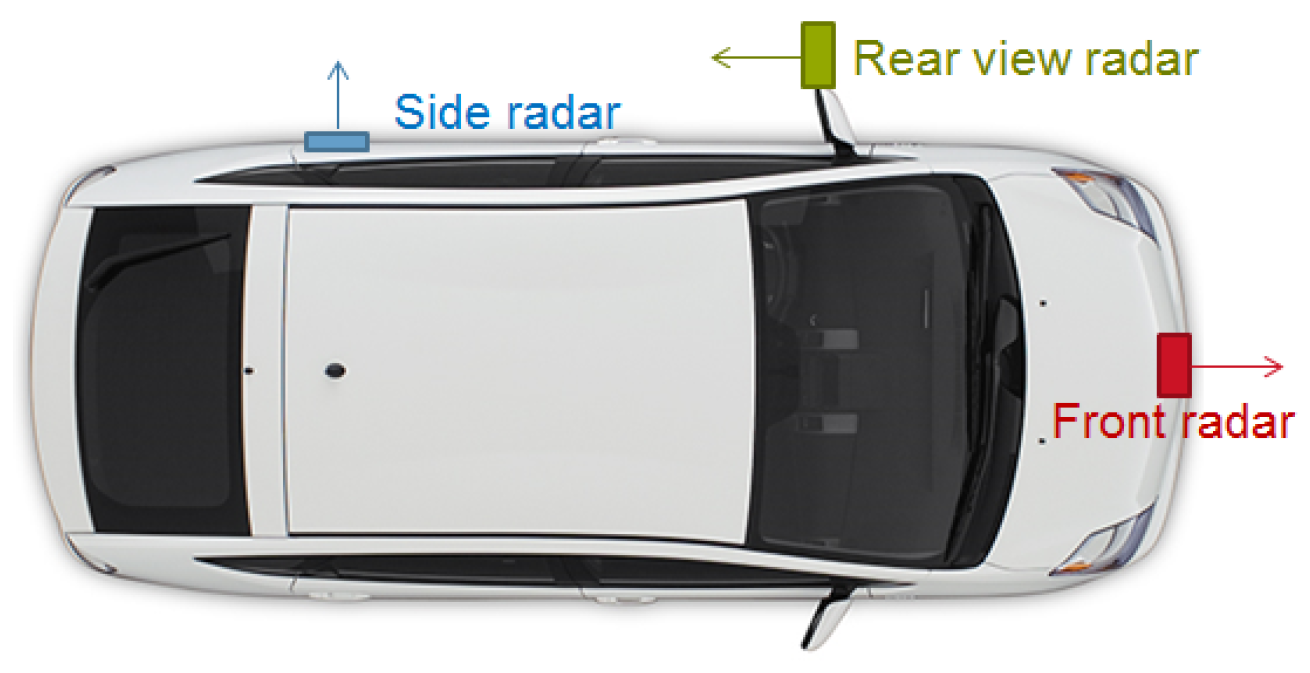
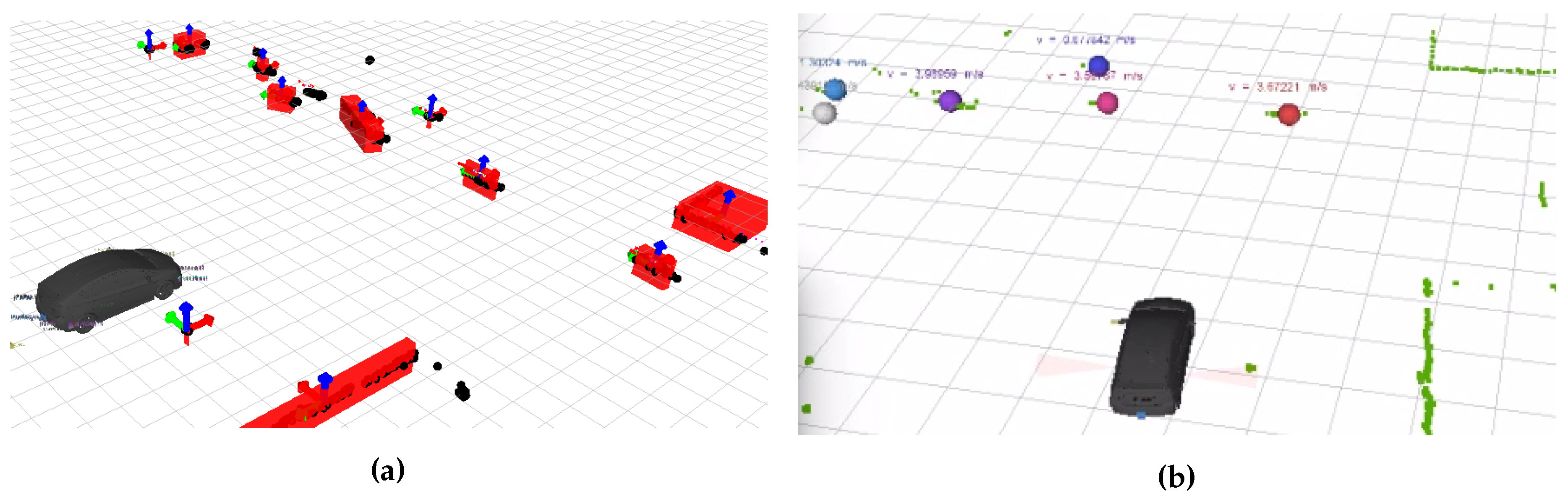
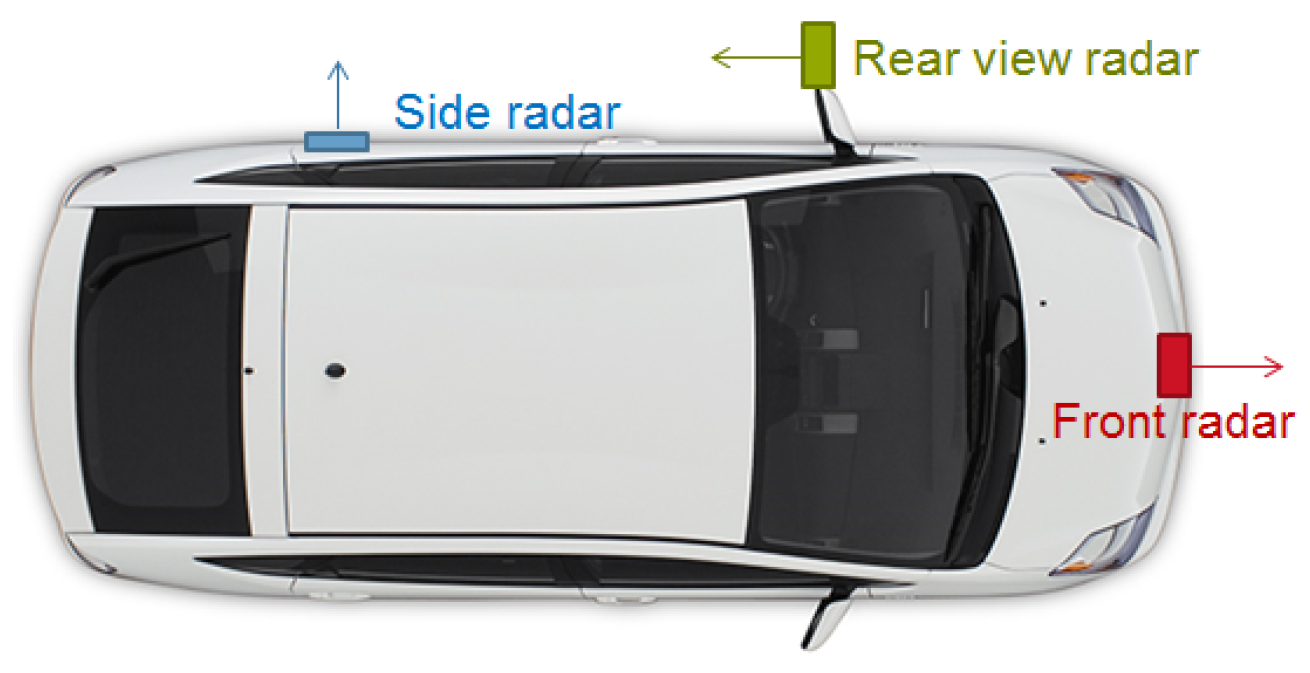
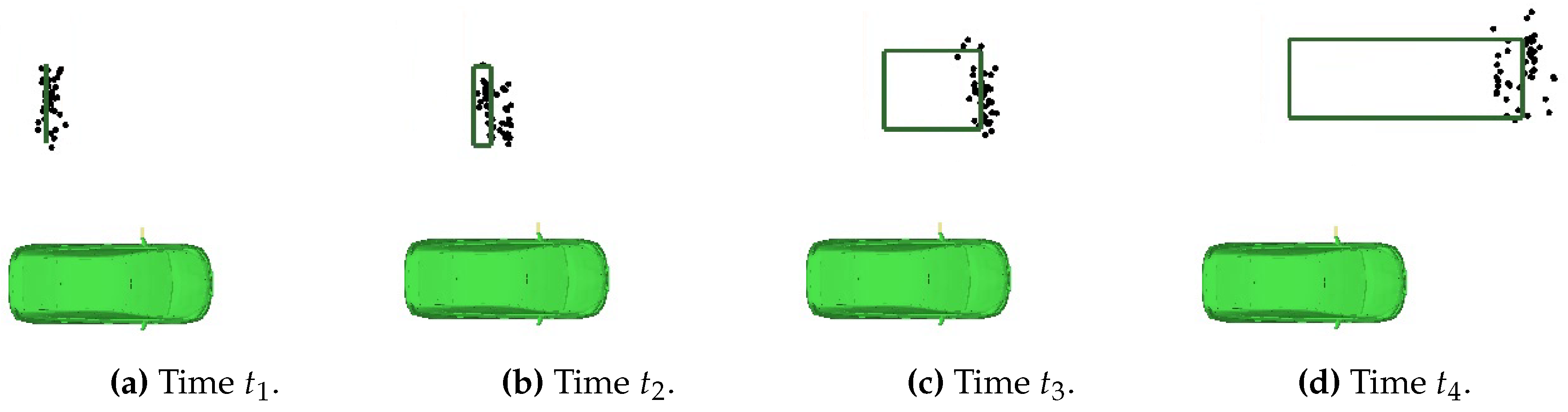
- Example 1 demonstrates low-level sensor fusion of data from multiple radar sensors using nonlinear models. The combination of sensors enables estimating quantities that none of the sensors could have estimated individually.
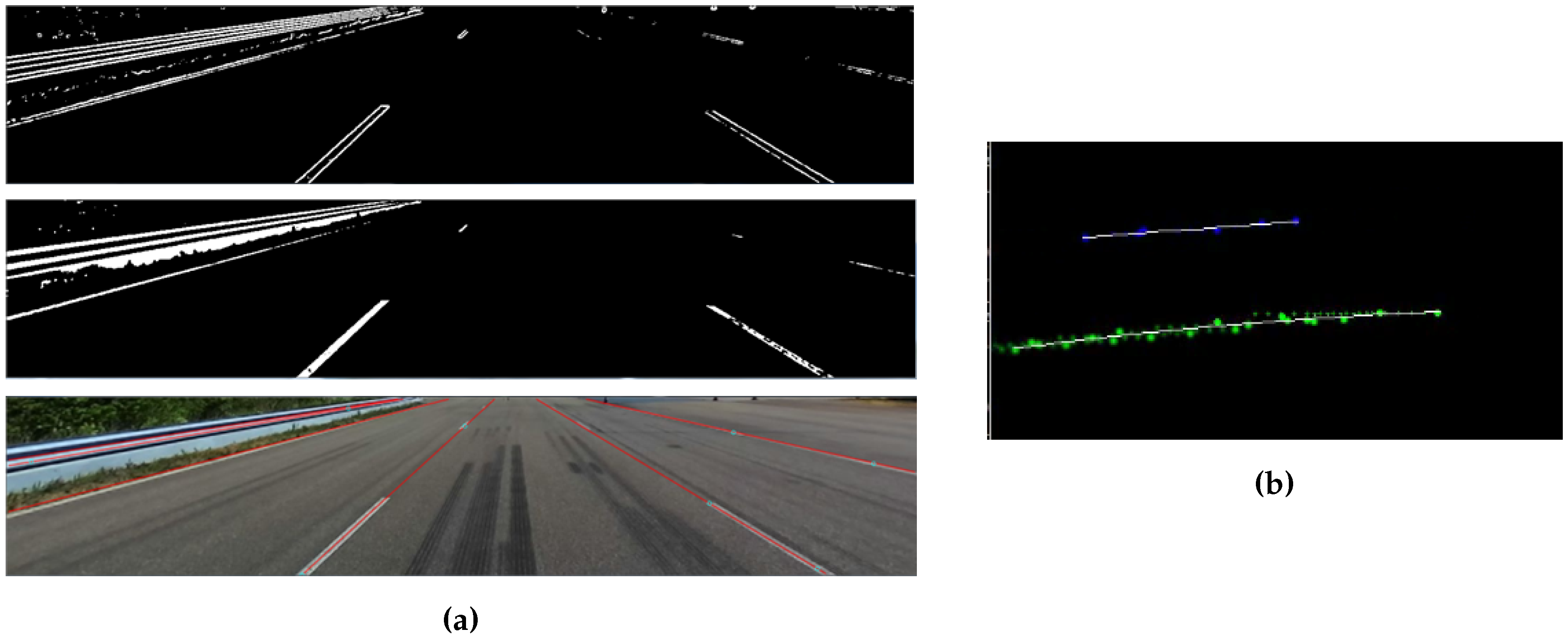
- In Example 2, different sensor modalities with different interfaces are combined. Information from one sensor is used for configuring another sensor’s feature extraction algorithm.
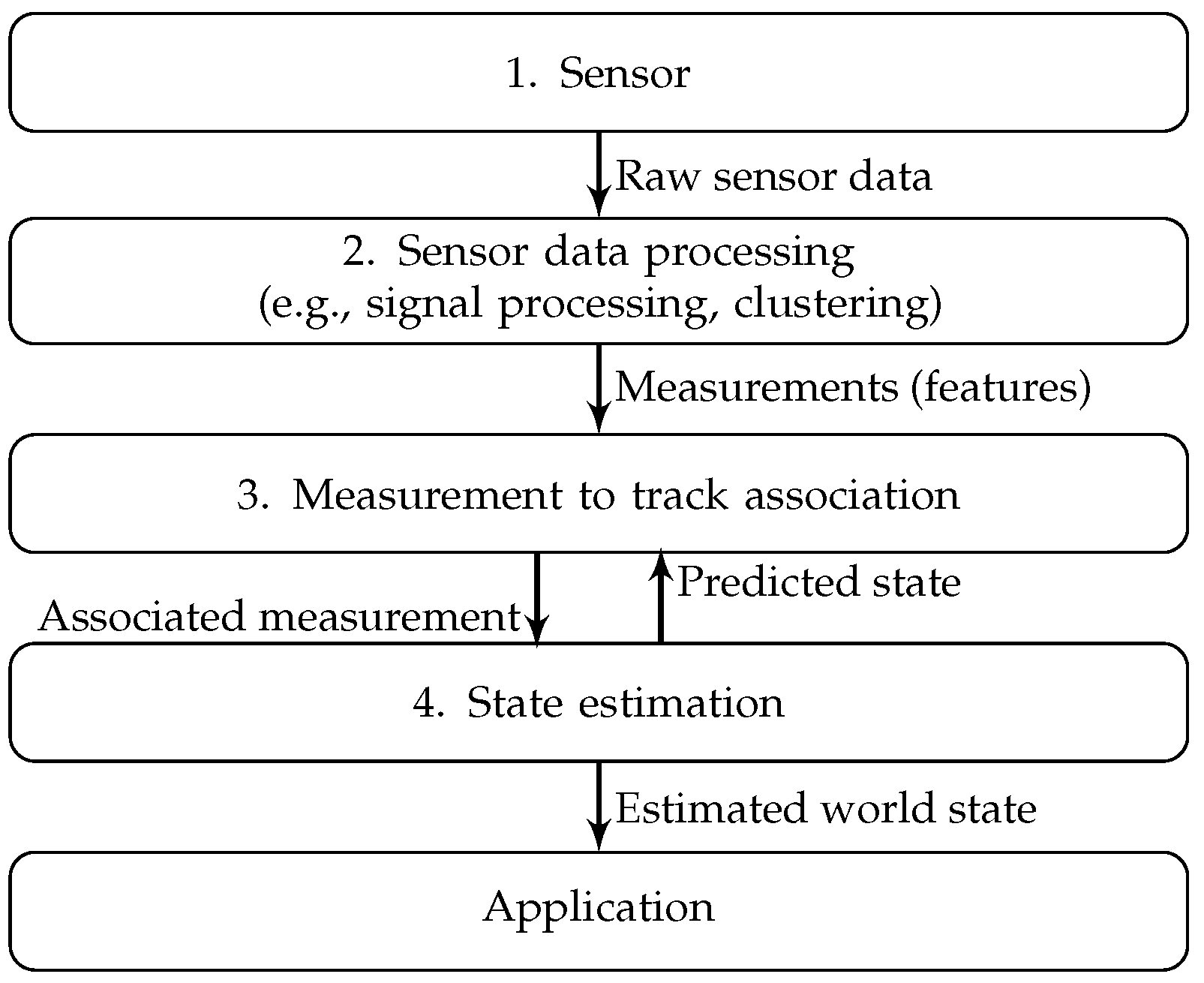
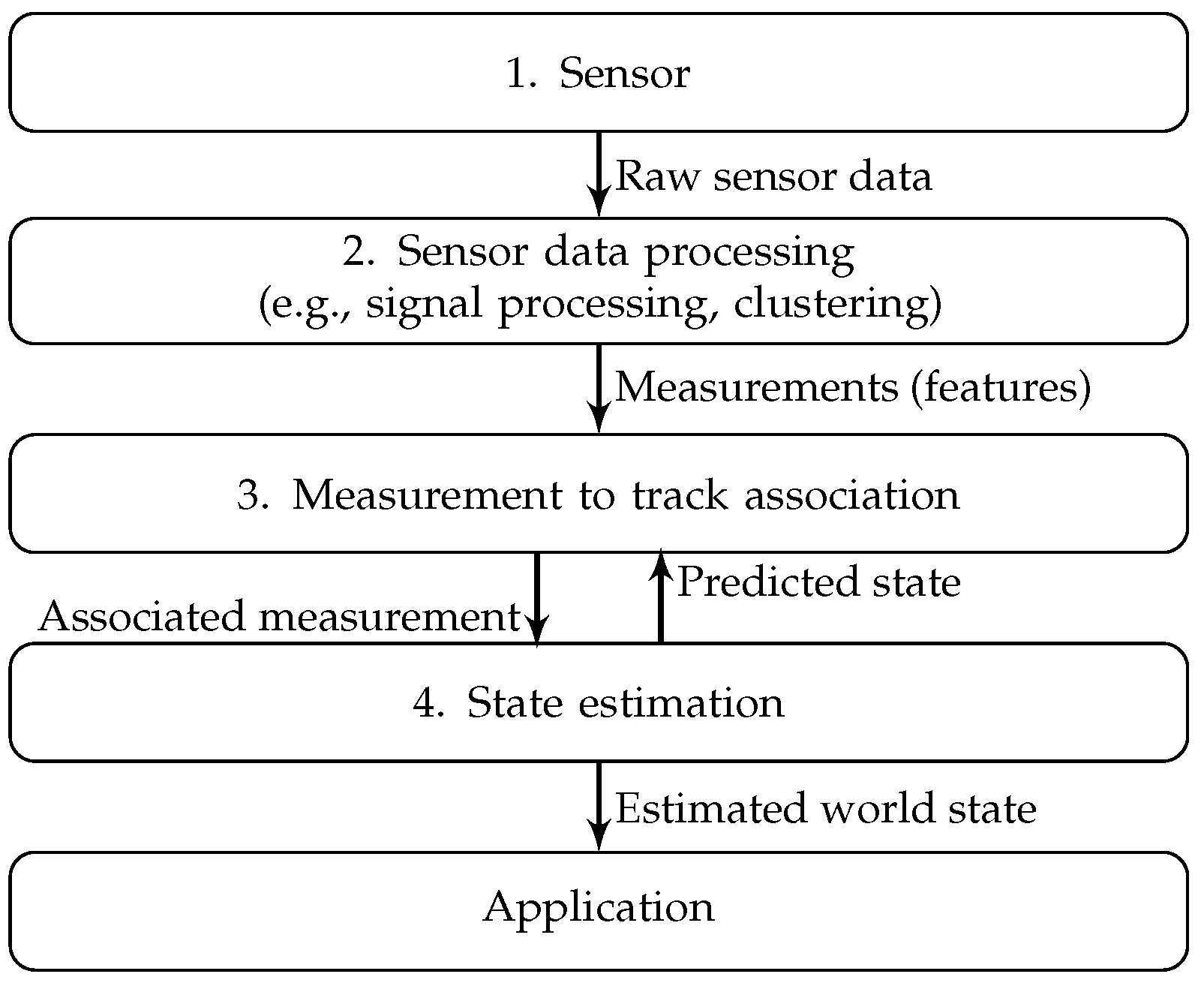
- The traditional approach as shown in Figure 1.
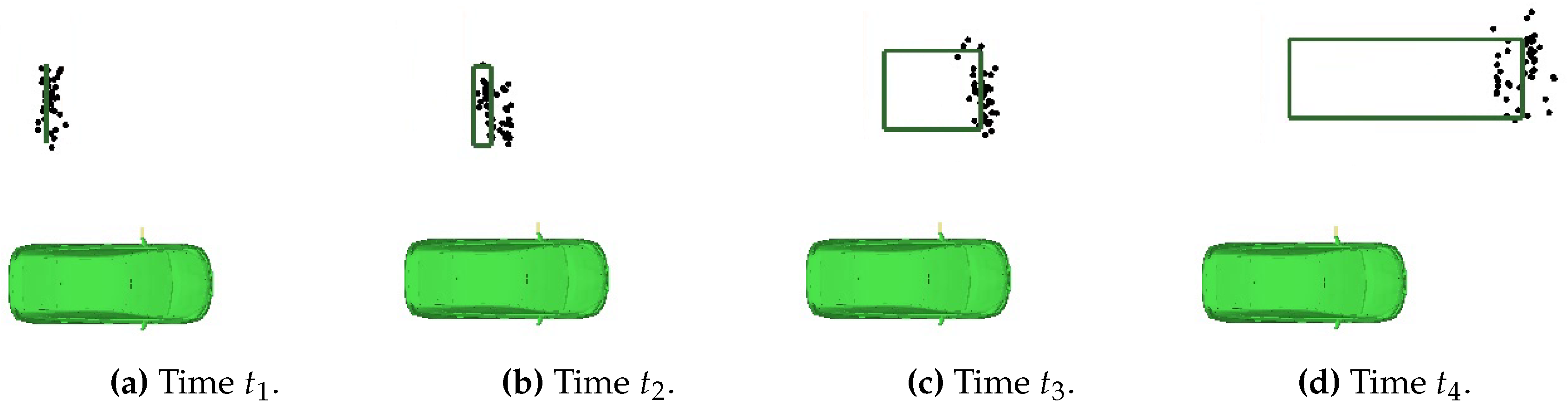
6.1. Example 1: Vehicle Tracking and Shape Estimation
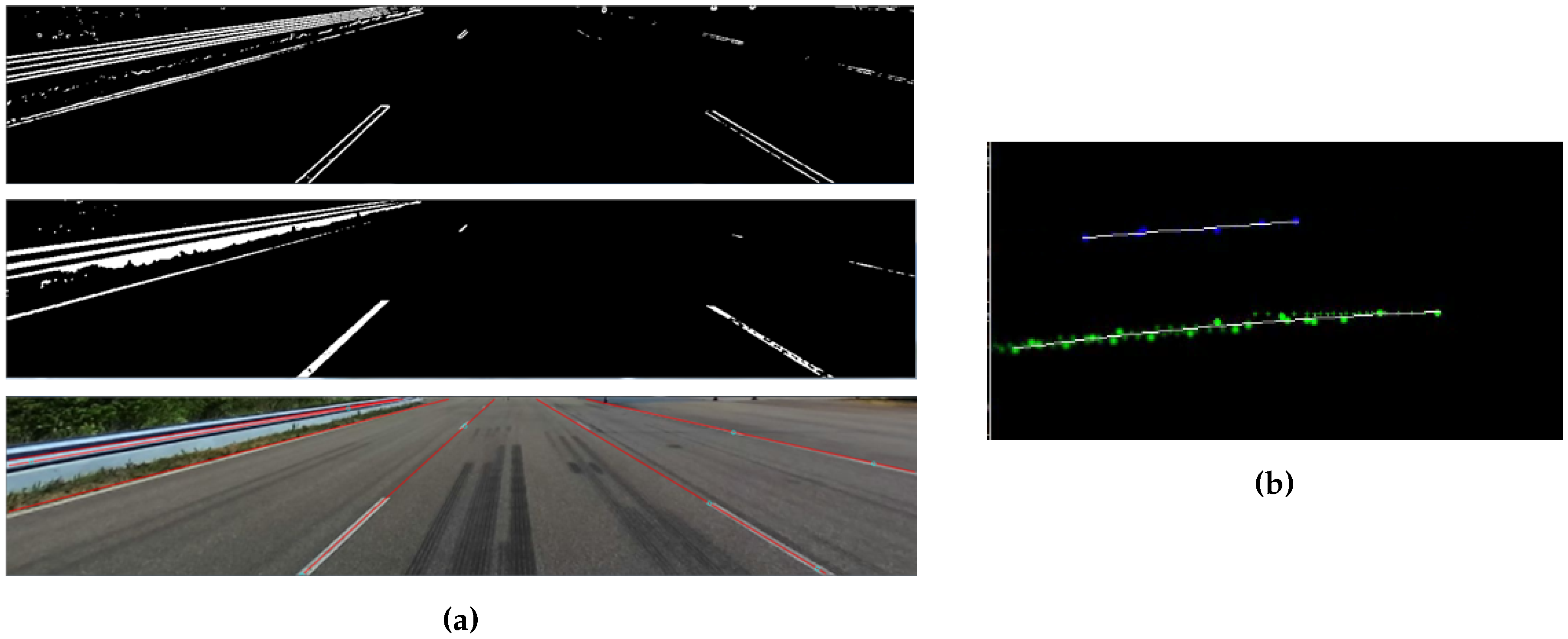
6.2. Example 2: Line Detection
6.3. Example 3: Bicycle Tracking
7. Conclusions and Recommendations
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Stiller, C.; León, F.P.; Kruse, M. Information fusion for automotive applications—An overview. Inf. Fusion 2011, 12, 244–252. [Google Scholar] [CrossRef]
- Ploeg, J.; Shladover, S.; Nijmeijer, H.; van de Wouw, N. Introduction to the special issue on the 2011 grand cooperative driving challenge. IEEE Trans. Intell. Transp. Syst. 2012, 13, 989–993. [Google Scholar] [CrossRef]
- Thrun, S.; Burgard, W.; Fox, D. Probabilistic Robotics (Intelligent Robotics and Autonomous Agents); The MIT Press: Cambridge, MA, USA, 2005. [Google Scholar]
- Arulampalam, M.S.; Maskell, S.; Gordon, N.; Clapp, T. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef]
- Khaleghi, B.; Khamis, A.; Karray, F.O.; Razavi, S.N. Multisensor data fusion: A review of the state-of-the-art. Inf. Fusion 2013, 14, 28–44. [Google Scholar] [CrossRef]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. Trans. ASME 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Aeberhard, M.; Rauch, S.; Bahram, M.; Tanzmeister, G.; Thomas, J.; Pilat, Y.; Homm, F.; Huber, W.; Kaempchen, N. Experience, Results and Lessons Learned from Automated Driving on Germany’s Highways. IEEE Intell. Transp. Syst. Mag. 2015, 7, 42–57. [Google Scholar] [CrossRef]
- Anderson, B.D.; Moore, J.B. Optimal Filtering; Courier Corporation: New York, NY, USA, 2012. [Google Scholar]
- Wan, E.A.; Van Der Merwe, R. The unscented Kalman filter for nonlinear estimation. In Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium, Lake Louise, AB, Canada, 1–4 October 2000; pp. 153–158.
- Zindler, K.; Geiß, N.; Doll, K.; Heinlein, S. Real-time ego-motion estimation using Lidar and a vehicle model based Extended Kalman Filter. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems, Qingdao, China, 8–11 October 2014; pp. 431–438.
- Kim, D.; Chung, T.; Yi, K. Lane map building and localization for automated driving using 2D laser rangefinder. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium, Seoul, Korea, 28 June–1 July 2015; pp. 680–685.
- Macaveiu, A.; Campeanu, A.; Nafornita, I. Kalman-based tracker for multiple radar targets. In Proceedings of the 10th International Conference on Communications, Bucharest, Romania, 29–31 May 2014; pp. 1–4.
- Held, D.; Levinson, J.; Thrun, S.; Savarese, S. Robust real-time tracking combining 3D shape, color, and motion. Int. J. Robot. Res. 2015, 35, 30–49. [Google Scholar] [CrossRef]
- Schubert, R.; Adam, C.; Richter, E.; Bauer, S.; Lietz, H.; Wanielik, G. Generalized probabilistic data association for vehicle tracking under clutter. In Proceedings of the 2012 IEEE Intelligent Vehicles Symposium (IV), Madrid, Spain, 3–7 June 2012; pp. 962–968.
- Gordon, N.J.; Salmond, D.J.; Smith, A.F.M. Novel approach to nonlinear/non-Gaussian Bayesian state estimation. IEE Proc. F Radar Signal Process. 1993, 140, 107–113. [Google Scholar] [CrossRef]
- Smith, A.; Doucet, A.; de Freitas, N.; Gordon, N. Sequential Monte Carlo Methods in Practice; Springer Science & Business Media: New York, NY, USA, 2013. [Google Scholar]
- Vatavu, A.; Danescu, R.; Nedevschi, S. Stereovision-Based Multiple Object Tracking in Traffic Scenarios Using Free-Form Obstacle Delimiters and Particle Filters. IEEE Trans. Intell. Transp. Syst. 2015, 16, 498–511. [Google Scholar] [CrossRef]
- Wyffels, K.; Campbell, M. Joint tracking and non-parametric shape estimation of arbitrary extended objects. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 3360–3367.
- Petrovskaya, A.; Thrun, S. Model based vehicle detection and tracking for autonomous urban driving. Auton. Robots 2009, 26, 123–139. [Google Scholar] [CrossRef]
- Fox, D. Adapting the sample size in particle filters through KLD-sampling. Int. J. Robot. Res. 2003, 22, 985–1003. [Google Scholar] [CrossRef]
- Doucet, A.; Freitas, N.D.; Murphy, K.P.; Russell, S.J. Rao-Blackwellised Particle Filtering for Dynamic Bayesian Networks. In Proceedings of the 16th Conference on Uncertainty in Artificial Intelligence, Stanford, CA, USA, 30 June–3 July 2000; pp. 176–183.
- Mahler, R. “Statistics 102” for multisource-multitarget detection and tracking. IEEE J. Sel. Top. Signal Process. 2013, 7, 376–389. [Google Scholar] [CrossRef]
- Mahler, R.P.S. Multitarget Bayes filtering via first-order multitarget moments. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1152–1178. [Google Scholar] [CrossRef]
- Mahler, R. PHD filters of higher order in target number. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1523–1543. [Google Scholar] [CrossRef]
- Vo, B.N.; Ma, W.K. The Gaussian mixture probability hypothesis density filter. IEEE Trans. Signal Process. 2006, 54, 4091–4104. [Google Scholar] [CrossRef]
- Vo, B.T.; Vo, B.N.; Cantoni, A. The Cardinality Balanced Multi-Target Multi-Bernoulli Filter and Its Implementations. IEEE Trans. Signal Process. 2009, 57, 409–423. [Google Scholar]
- Reuter, S.; Vo, B.T.; Vo, B.N.; Dietmayer, K. The labeled multi-Bernoulli filter. IEEE Trans. Signal Process. 2014, 62, 3246–3260. [Google Scholar]
- Xue, Y.; Morrell, D. Target tracking and data fusion using multiple adaptive Foveal sensors. In Proceedings of the Sixth International Conference of Information Fusion, Cairns, Australia, 8–11 July 2003; Volume 1, pp. 326–333.
- Chang, K.C.; Zhi, T.; Saha, R.K. Performance evaluation of track fusion with information matrix filter. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 455–466. [Google Scholar] [CrossRef]
- Darms, M.; Winner, H. A modular system architecture for sensor data processing of ADAS applications. In Proceedings of the 2005 IEEE Intelligent Vehicles Symposium, Las Vegas, NV, USA, 6–8 June 2005; pp. 729–734.
- Pietzsch, S.; Vu, T.D.; Burlet, J.; Aycard, O.; Hackbarth, T.; Appenrodt, N.; Dickmann, J.; Radig, B. Results of a precrash application based on laser scanner and short-range radars. IEEE Trans. Intell. Transp. Syst. 2009, 10, 584–593. [Google Scholar] [CrossRef] [Green Version]
- Elfring, J.; Appeldoorn, R.; Kwakkernaat, M. Multisensor simultaneous vehicle tracking and shape estimation. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016; pp. 630–635.
- Munz, M.; Mahlisch, M.; Dietmayer, K. Generic Centralized Multi Sensor Data Fusion Based on Probabilistic Sensor and Environment Models for Driver Assistance Systems. IEEE Intell. Transp. Syst. Mag. 2010, 2, 6–17. [Google Scholar] [CrossRef]
- Nilsson, S.; Klekamp, A. A Comparison of Architectures for Track Fusion. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Las Palmas de Gran Canaria, Spain, 15–18 September 2015; pp. 527–522.
- Makarenko, A.; Brooks, A.; Kaupp, T.; Durrant-Whyte, H.; Dellaert, F. Decentralised data fusion: A graphical model approach. In Proceedings of the 12th International Conference on Information Fusion, Seattle, WA, USA, 6–9 July 2009; pp. 545–554.
- Julier, S.J.; Uhlmann, J.K. A non-divergent estimation algorithm in the presence of unknown correlations. In Proceedings of the 1997 American Control Conference, Albuquerque, NM, USA, 4–6 June 1997; Volume 4, pp. 2369–2373.
- Fourati, H. Multisensor Data Fusion: From Algorithms and Architectural Design to Applications; CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Reinhardt, M.; Noack, B.; Arambel, P.O.; Hanebeck, U.D. Minimum Covariance Bounds for the Fusion under Unknown Correlations. IEEE Signal Process. Lett. 2015, 22, 1210–1214. [Google Scholar] [CrossRef]
- Niehsen, W. Information fusion based on fast covariance intersection filtering. In Proceedings of the Fifth International Conference on Information Fusion, Annapolis, MD, USA, 8–11 July 2002; Volume 2, pp. 901–904.
- Franken, D.; Hupper, A. Improved fast covariance intersection for distributed data fusion. In Proceedings of the 2005 8th International Conference on Information Fusion, Philadelphia, PA, USA, 25–28 July 2005; Volume 1.
- Benaskeur, A.R. Consistent fusion of correlated data sources. In Proceedings of the IEEE 2002 28th Annual Conference of the IECON 02 Industrial Electronics Society, Sevilla, Spain, 5–8 November 2002; Volume 4, pp. 2652–2656.
- Zhou, Y.; Li, J. Robust Decentralized Data Fusion Based on Internal Ellipsoid Approximation. IFAC Proc. Vol. 2008, 41, 9964–9969. [Google Scholar] [CrossRef]
- Sijs, J.; Lazar, M.; Bosch, P. State fusion with unknown correlation: Ellipsoidal intersection. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 3992–3997.
- Tian, X.; Bar-Shalom, Y. Algorithms for Asynchronous Track-to-Track Fusion. J. Adv. Inf. Fusion 2010, 5, 128–138. [Google Scholar]
- Aeberhard, M.; Schlichtharle, S.; Kaempchen, N.; Bertram, T. Track-to-Track Fusion With Asynchronous Sensors Using Information Matrix Fusion for Surround Environment Perception. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1717–1726. [Google Scholar] [CrossRef]
- Bar-Shalom, Y. On the track-to-track correlation problem. IEEE Trans. Autom. Control 1981, 26, 571–572. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Li, X.R. Multitarget-Multisensor Tracking : Principles and Techniques; Yaakov Bar-Shalom: Storrs, CT, USA, 1995. [Google Scholar]
- Bar-Shalom, Y.; Campo, L. The Effect of the Common Process Noise on the Two-Sensor Fused-Track Covariance. IEEE Trans. Aerosp. Electron. Syst. 1986, AES-22, 803–805. [Google Scholar] [CrossRef]
- Zhu, H.; Zhai, Q.; Yu, M.; Han, C. Estimation fusion algorithms in the presence of partially known cross-correlation of local estimation errors. Inf. Fusion 2014, 18, 187–196. [Google Scholar] [CrossRef]
- Aeberhard, M.; Kaempchen, N. High-level sensor data fusion architecture for vehicle surround environment perception. In Proceedings of the 8th International Workshop on Intelligent Transportation, Hamburg, Germany, 22–23 March 2011.
- Li, H.; Nashashibi, F.; Lefaudeux, B.; Pollard, E. Track-to-track fusion using split covariance intersection filter-information matrix filter (SCIF-IMF) for vehicle surrounding environment perception. In Proceedings of the 2013 16th International IEEE Conference on Intelligent Transportation Systems, Hague, The Netherlands, 6–9 October 2013; pp. 1430–1435.
- Kunz, F.; Nuss, D.; Wiest, J.; Deusch, H.; Reuter, S.; Gritschneder, F.; Scheel, A.; Stubler, M.; Bach, M.; Hatzelmann, P.; et al. Autonomous driving at Ulm University: A modular, robust, and sensor-independent fusion approach. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Korea, 28 June–1 July 2015; pp. 666–673.
- De Laet, T. Rigorously Bauesian Multitarget Tracking and Localization. Ph.D. Thesis, Katholieke Universiteit Leuven, Leuven, Belgium, 2010. [Google Scholar]
- Reid, D. An algorithm for tracking multiple targets. IEEE Trans. Autom. Control 1979, 24, 843–854. [Google Scholar] [CrossRef]
- Cox, I.J.; Hingorani, S.L. An Efficient Implementation of Reid’s Multiple Hypothesis Tracking Algorithm and Its Evaluation for the Purpose of Visual Tracking. IEEE Trans. Pattern Anal. Mach. Intell. 1996, 18, 138–150. [Google Scholar] [CrossRef]
- Blackman, S.S. Multiple hypothesis tracking for multiple target tracking. IEEE Aerosp. Electron. Syst. Mag. 2004, 19, 5–18. [Google Scholar] [CrossRef]
- Li, X.R.; Bar-Shalom, Y. Tracking in clutter with nearest neighbor filters: Analysis and performance. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 995–1010. [Google Scholar]
- Bar-Shalom, Y.; Fortmann, T.E. Tracking and Data Association; Mathematics in Science and Engineering; Academic Press: San Diego, CA, USA, 1988. [Google Scholar]
- Schulz, D.; Burgard, W.; Fox, D.; Cremers, A.B. People tracking with mobile robots using sample-based joint probabilistic data association filters. Int. J. Robot. Res. 2003, 22, 99–116. [Google Scholar] [CrossRef]
- Horridge, P.; Maskell, S. Searching for, initiating and tracking multiple targets using existence probabilities. In Proceedings of the 12th International Conference on Information Fusion, Seattle, WA, USA, 6–9 July 2009; pp. 611–617.
- Sivaraman, S.; Trivedi, M.M. Looking at Vehicles on the Road: A Survey of Vision-Based Vehicle Detection, Tracking, and Behavior Analysis. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1773–1795. [Google Scholar] [CrossRef]
- Bar Hillel, A.; Lerner, R.; Levi, D.; Raz, G. Recent progress in road and lane detection: A survey. Mach. Vis. Appl. 2014, 25, 727–745. [Google Scholar] [CrossRef]
- Jia, Y.; Shelhamer, E.; Donahue, J.; Karayev, S.; Long, J.; Girshick, R.; Guadarrama, S.; Darrell, T. Caffe: Convolutional Architecture for Fast Feature Embedding. In Proceedings of the 22nd ACM International Conference on Multimedia, Orlando, FL, USA, 3–7 November 2014.
- Zheng, S.; Jayasumana, S.; Romera-Paredes, B.; Vineet, V.; Su, Z.; Du, D.; Huang, C.; Torr, P.H. Conditional random fields as recurrent neural networks. In Proceedings of the 2015 IEEE International Conference on Computer Vision, Los Alamitos, CA, USA, 7–13 December 2015; pp. 1529–1537.
- Li, X.R.; Jilkov, V.P. Survey of Maneuvering Target Tracking: Dynamic Models. EEE Trans. Aerosp. Electron. Syst. 2000, 39, 1333–1364. [Google Scholar]
- Vanthienen, D.; Klotzbuecher, M.; Bruyninckx, H. The 5C-based architectural Composition Pattern: lessons learned from re-developing the iTaSC framework for constraint-based robot programming. JOSER J. Softw. Eng. Robot. 2014, 5, 17–35. [Google Scholar]
- Garcia, F.E.; de Almeida Neris, V.P. A Data-Driven Entity-Component Approach to Develop Universally Accessible Games. In Universal Access in Human-Computer Interaction: Universal Access to Information and Knowledge; Stephanidis, C., Antona, M., Eds.; Springer International Publishing: Cham, Switzerland, 2014; Volume 8514, pp. 537–548. [Google Scholar]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J. ROS: An open-source Robot Operating System. In Proceedings of the ICRA 2009 Workshop on Open-Source Software in Robotics, Kobe, Japan, 12–17 May 2009.
- Bradski, G.; Kaehler, A. Learning OpenCV: Computer Vision with the OpenCV Library; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2008. [Google Scholar]
- Rusu, R.B.; Cousins, S. 3D is here: Point Cloud Library (PCL). In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 1–4.
- Gadeyne, K. BFL: Bayesian Filtering Library. Available online: http://www.orocos.org/bfl (accessed on 10 October 2016).
- Miller, M.L.; Stone, H.S.; Cox, I.J.; Cox, I.J. Optimizing Murty’s Ranked Assignment Method. IEEE Trans. Aerosp. Electron. Syst. 1997, 33, 851–862. [Google Scholar] [CrossRef]


© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elfring, J.; Appeldoorn, R.; Van den Dries, S.; Kwakkernaat, M. Effective World Modeling: Multisensor Data Fusion Methodology for Automated Driving. Sensors 2016, 16, 1668. https://doi.org/10.3390/s16101668
Elfring J, Appeldoorn R, Van den Dries S, Kwakkernaat M. Effective World Modeling: Multisensor Data Fusion Methodology for Automated Driving. Sensors. 2016; 16(10):1668. https://doi.org/10.3390/s16101668
Chicago/Turabian StyleElfring, Jos, Rein Appeldoorn, Sjoerd Van den Dries, and Maurice Kwakkernaat. 2016. "Effective World Modeling: Multisensor Data Fusion Methodology for Automated Driving" Sensors 16, no. 10: 1668. https://doi.org/10.3390/s16101668