
The Design and Analysis of Split Row-Column Addressing Array for 2-D Transducer


Abstract
:1. Introduction
2. Method
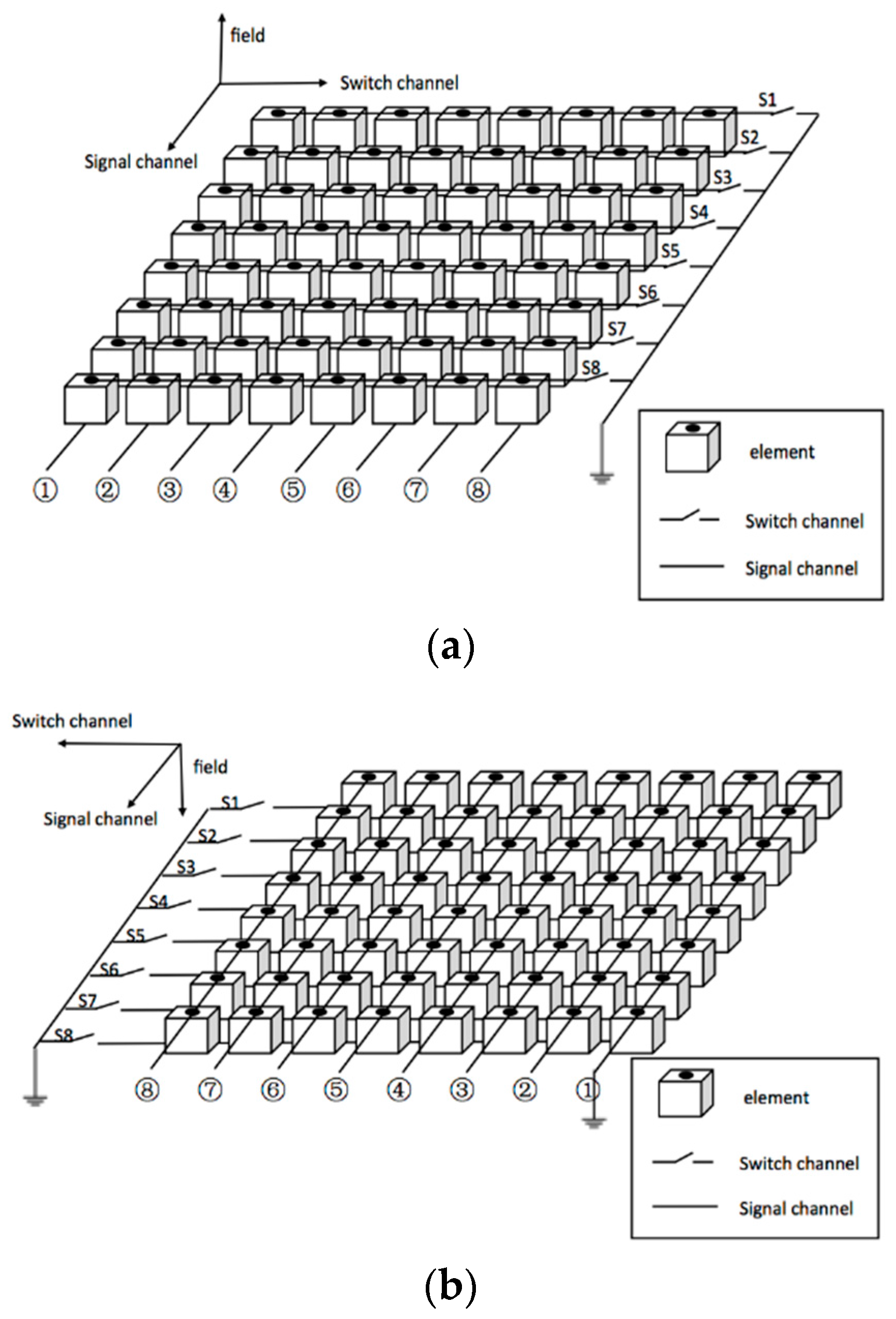
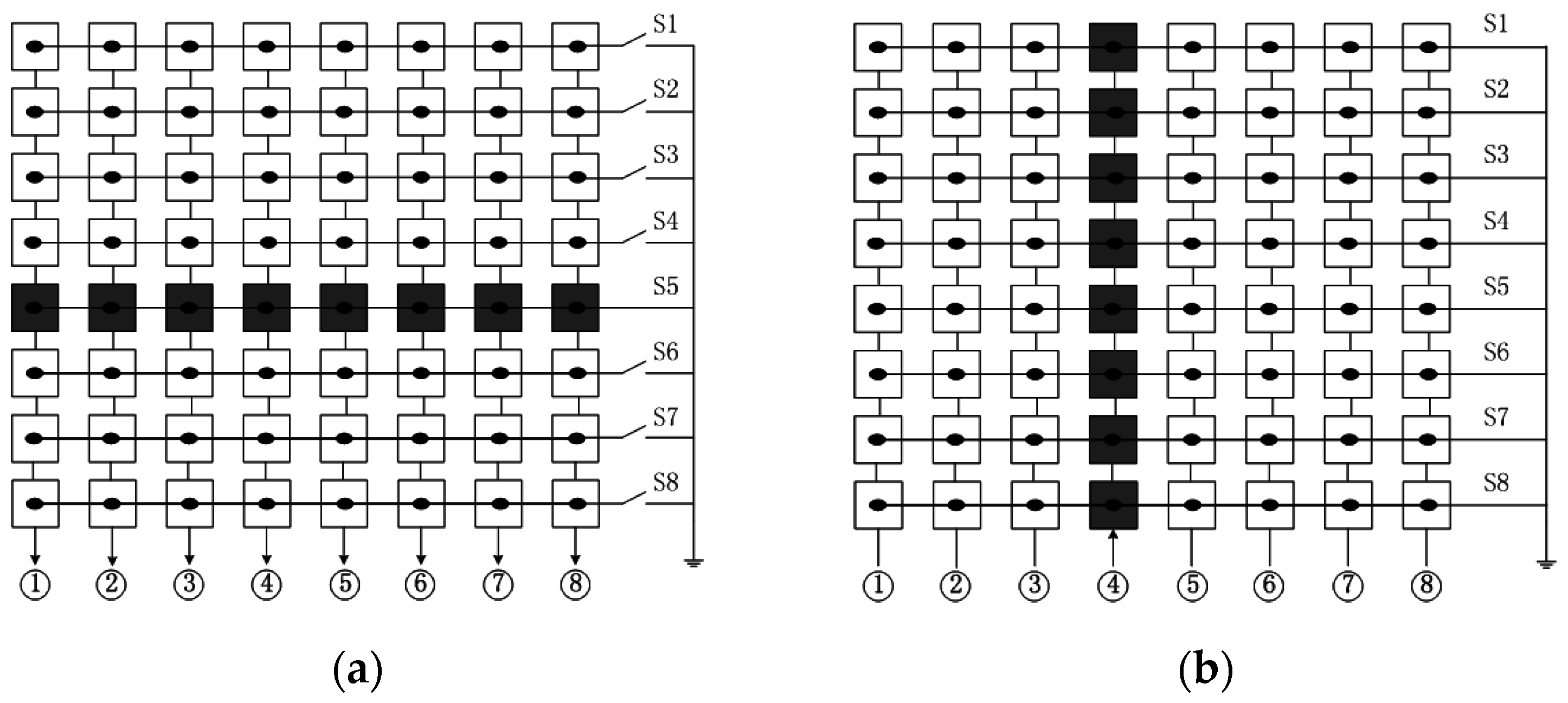
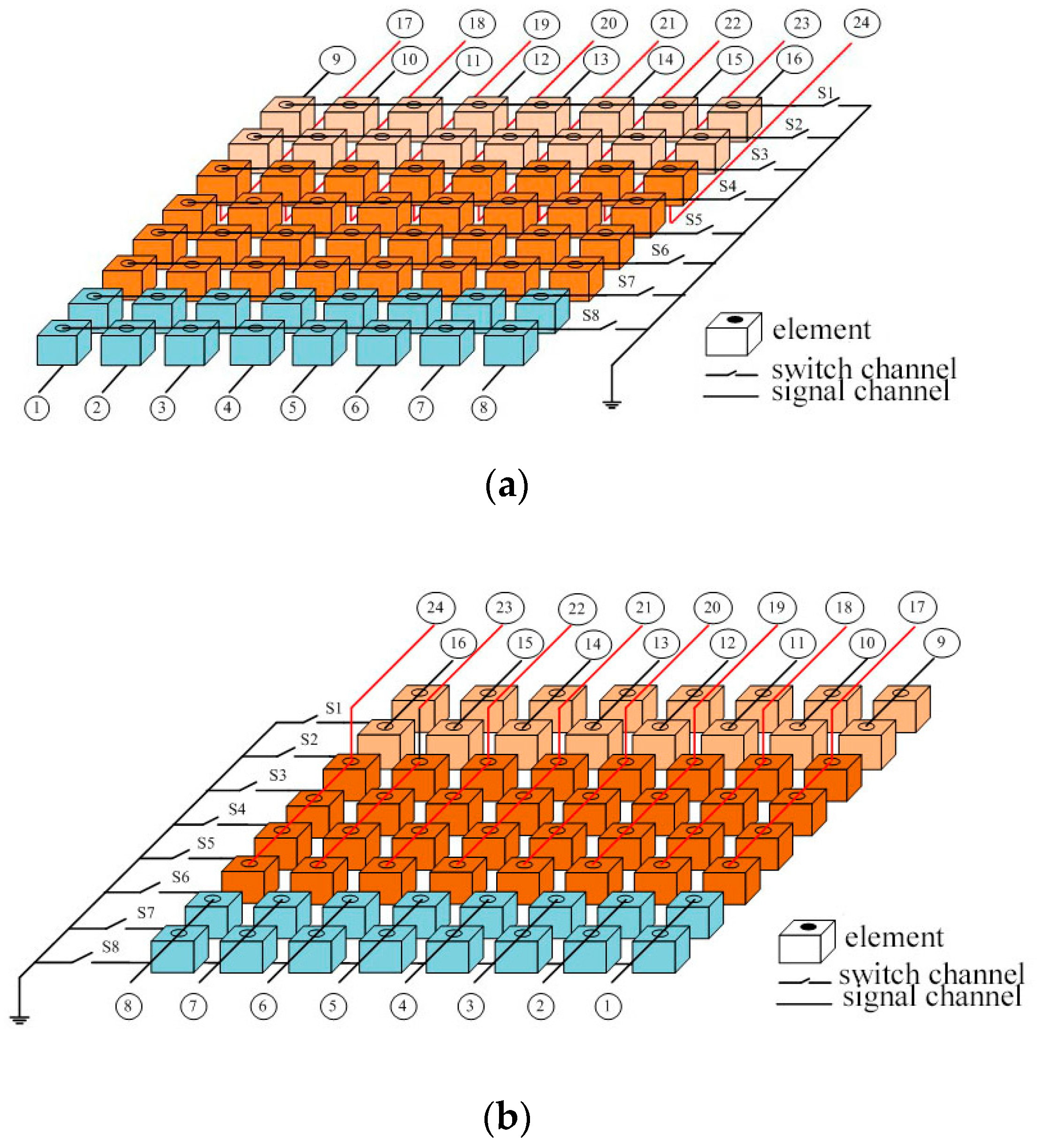
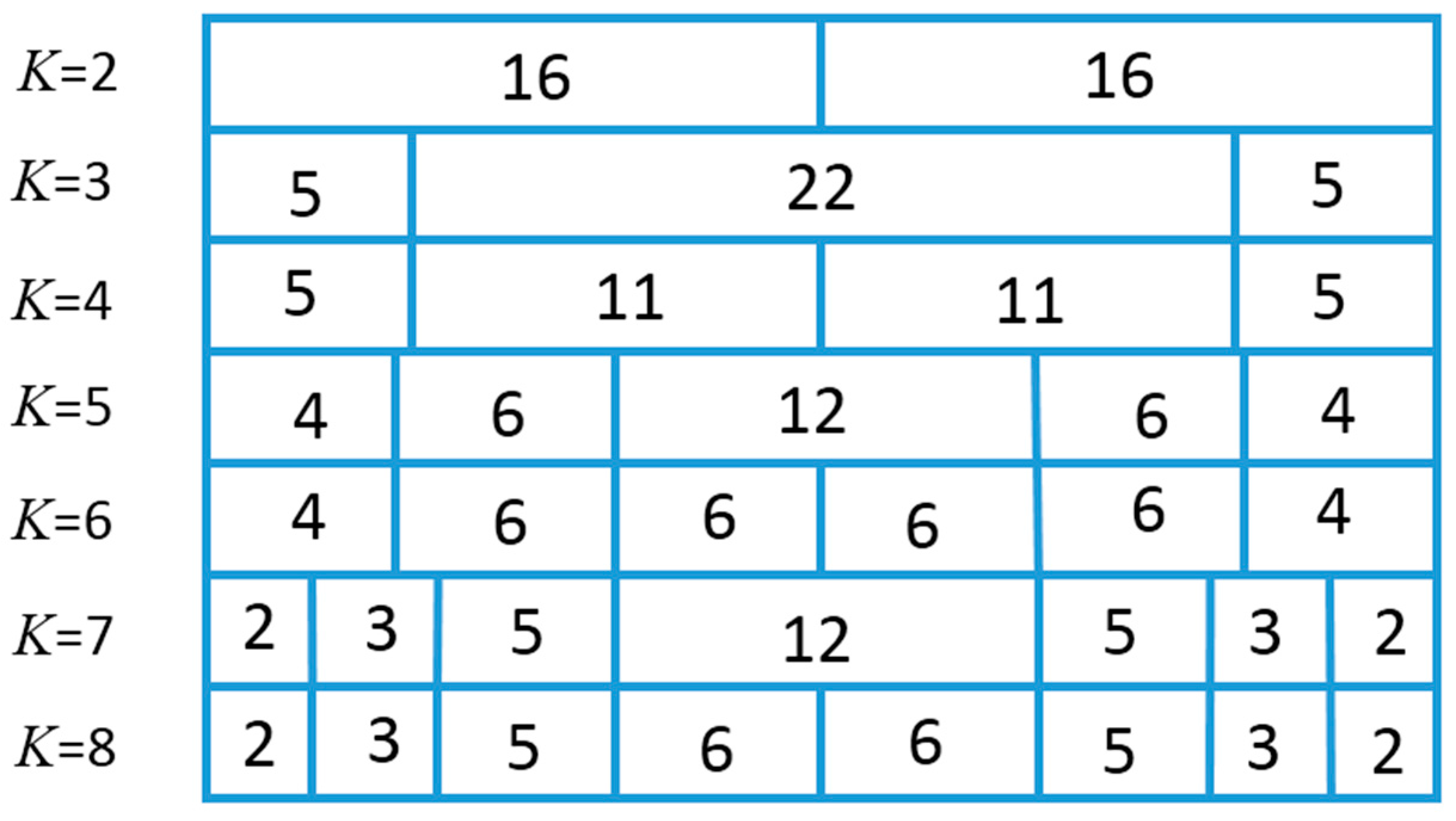
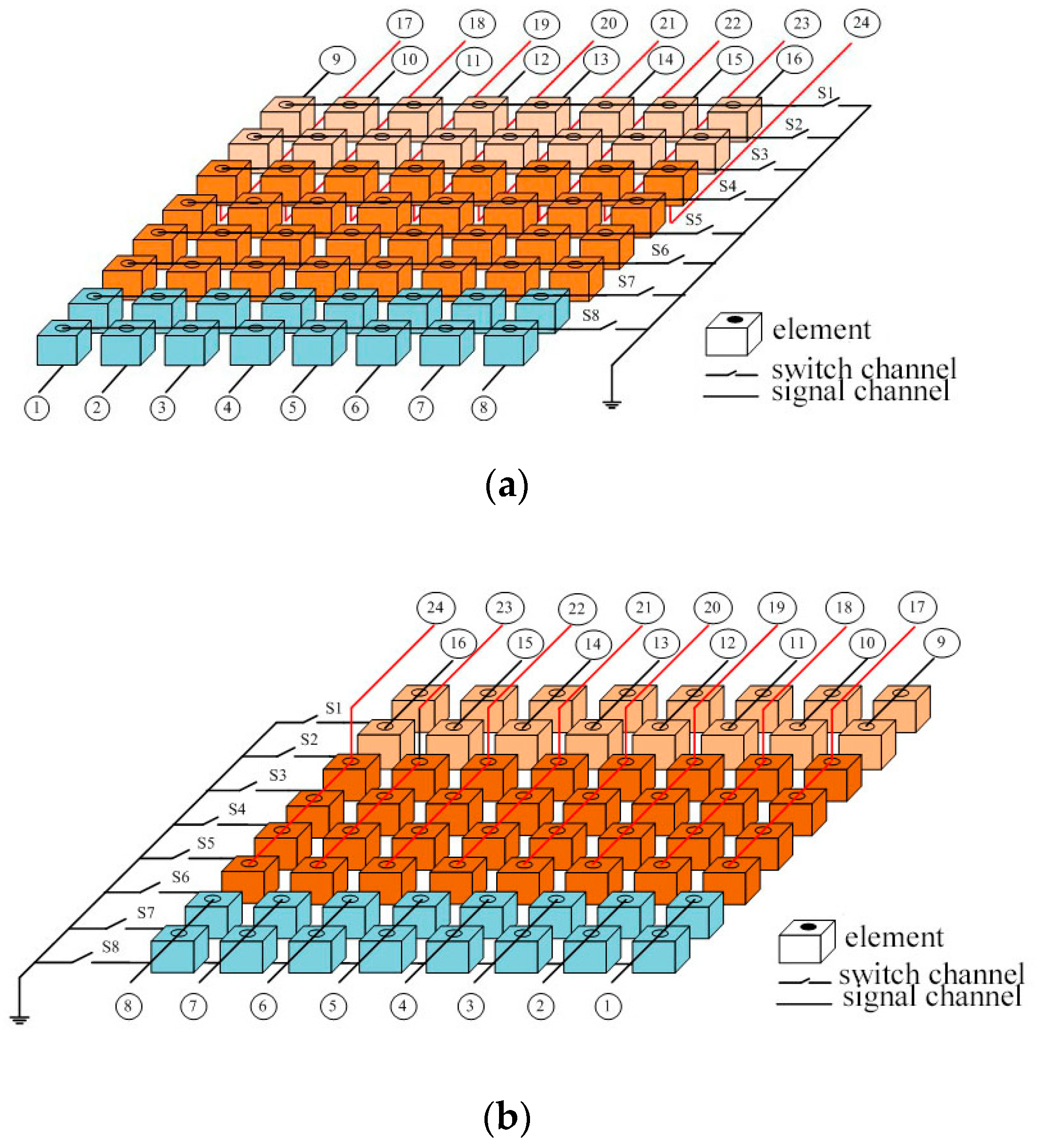
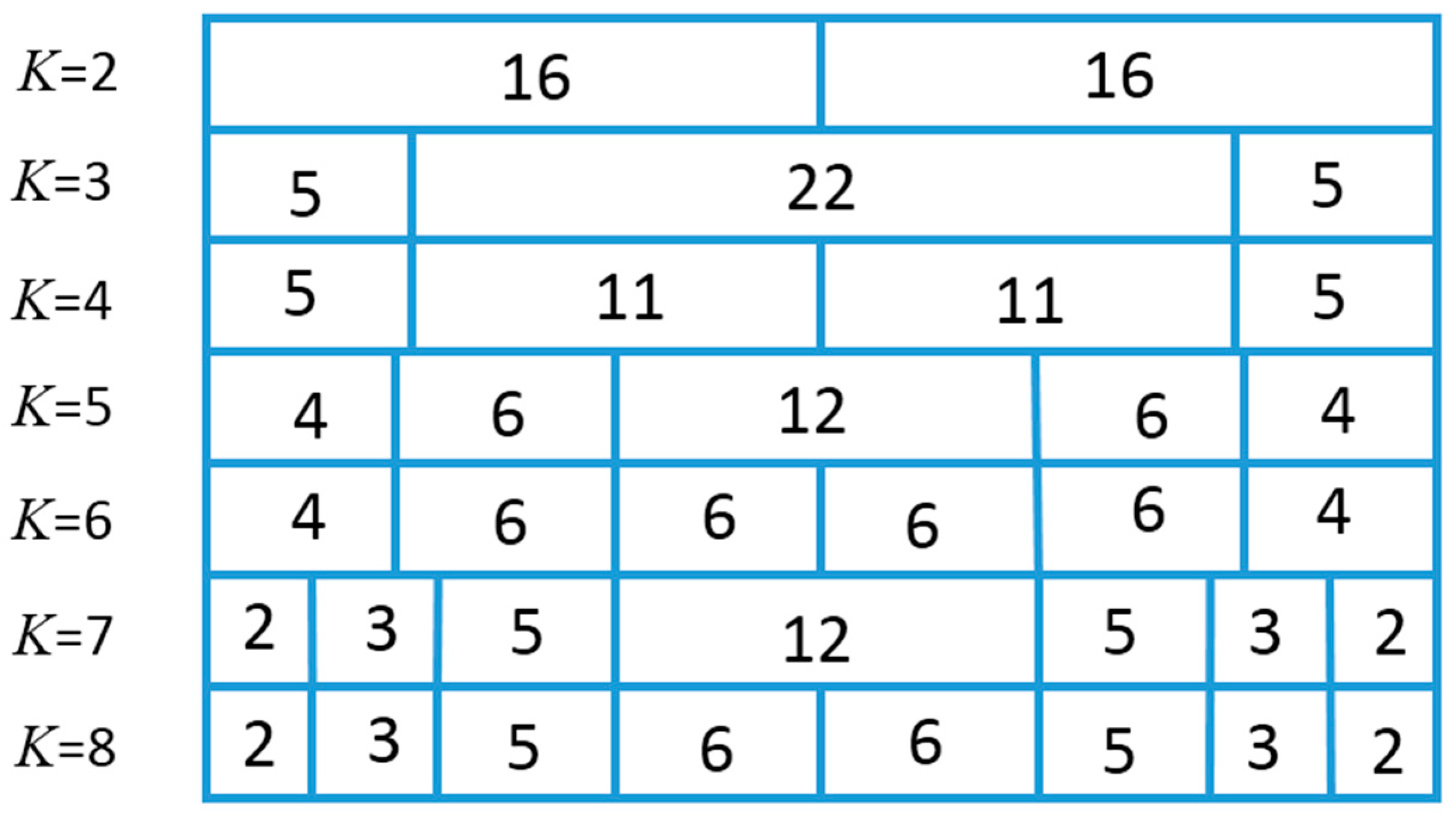
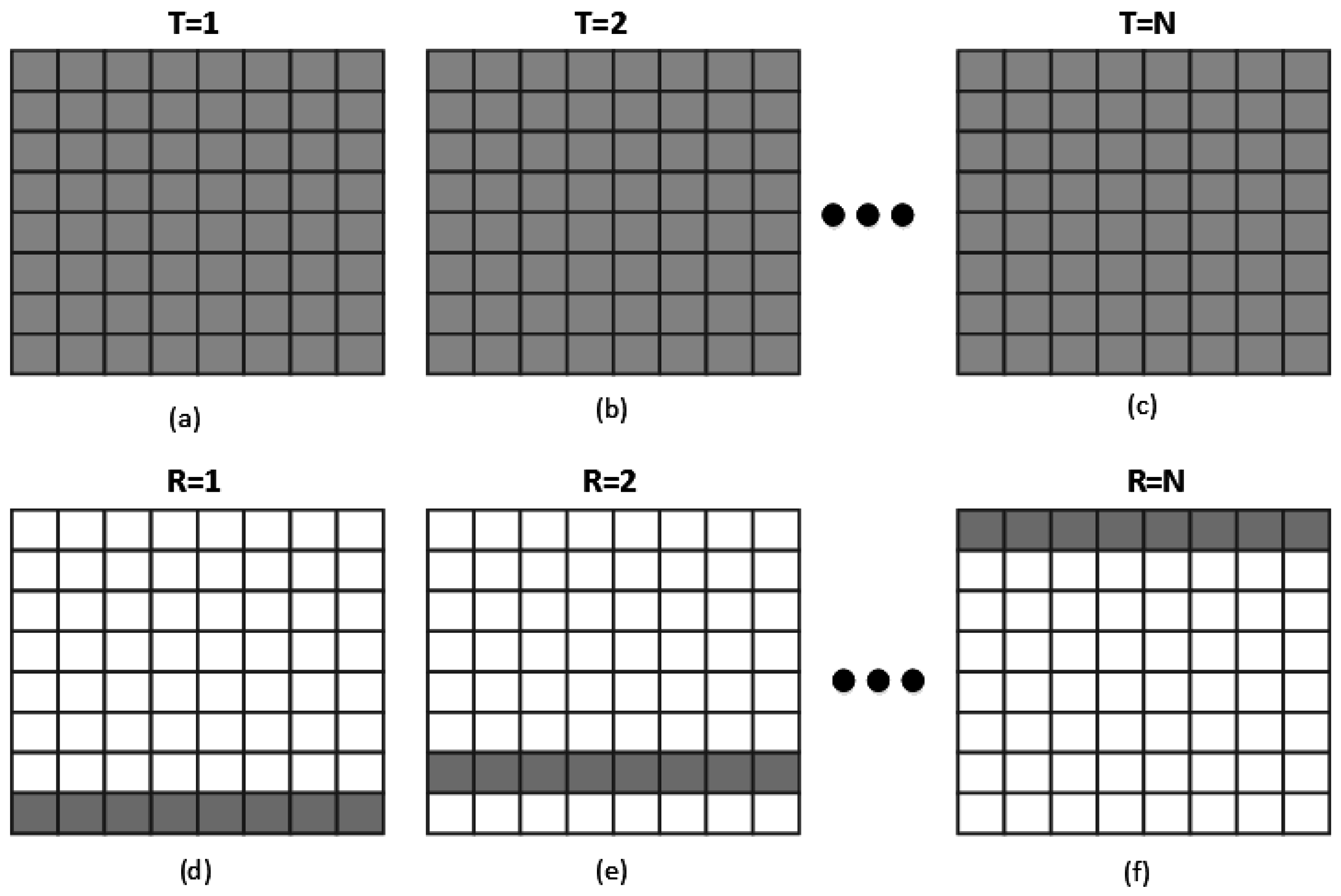
2.1. Splitting Row-Column Addressing (SRCA)
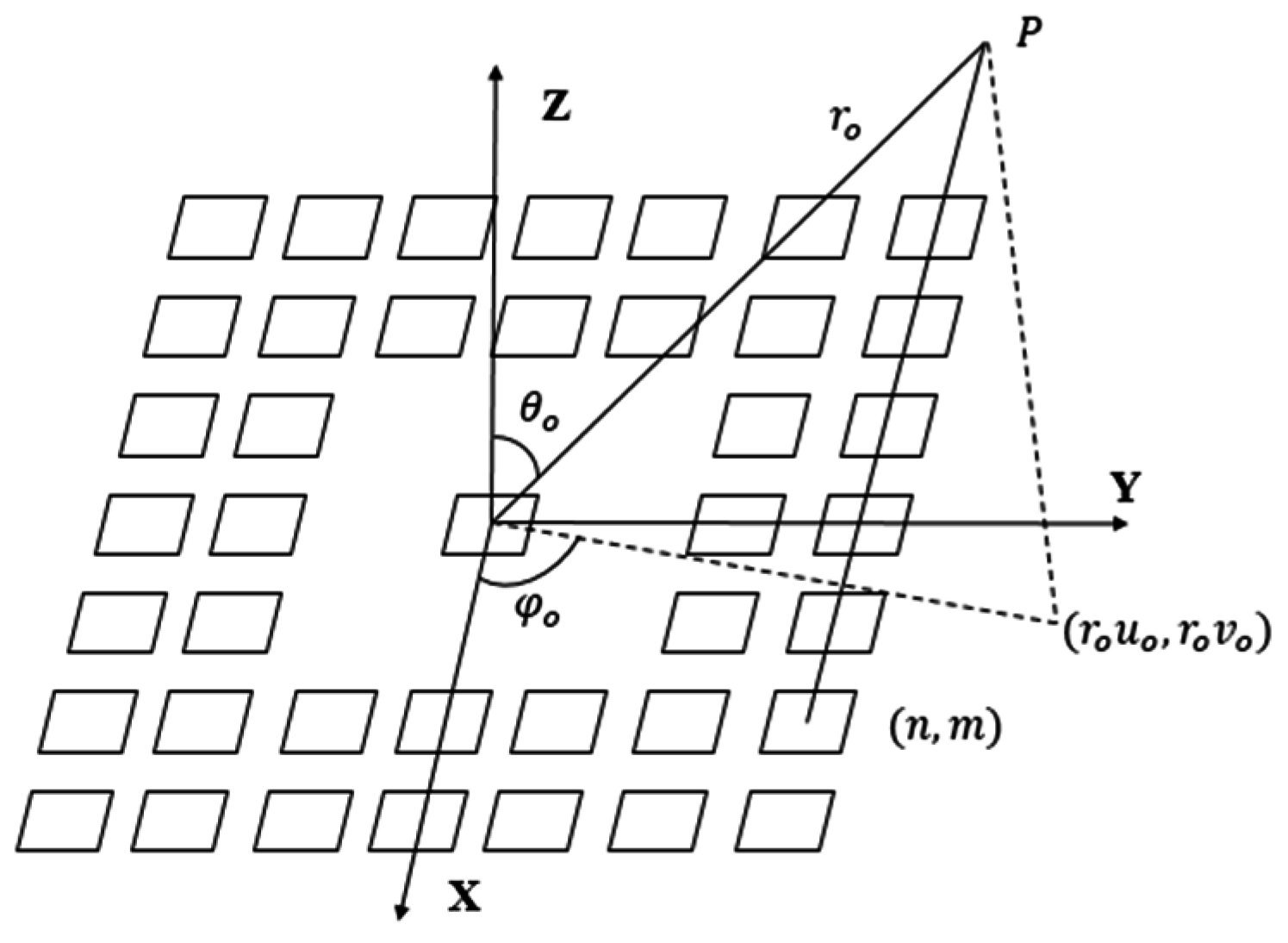
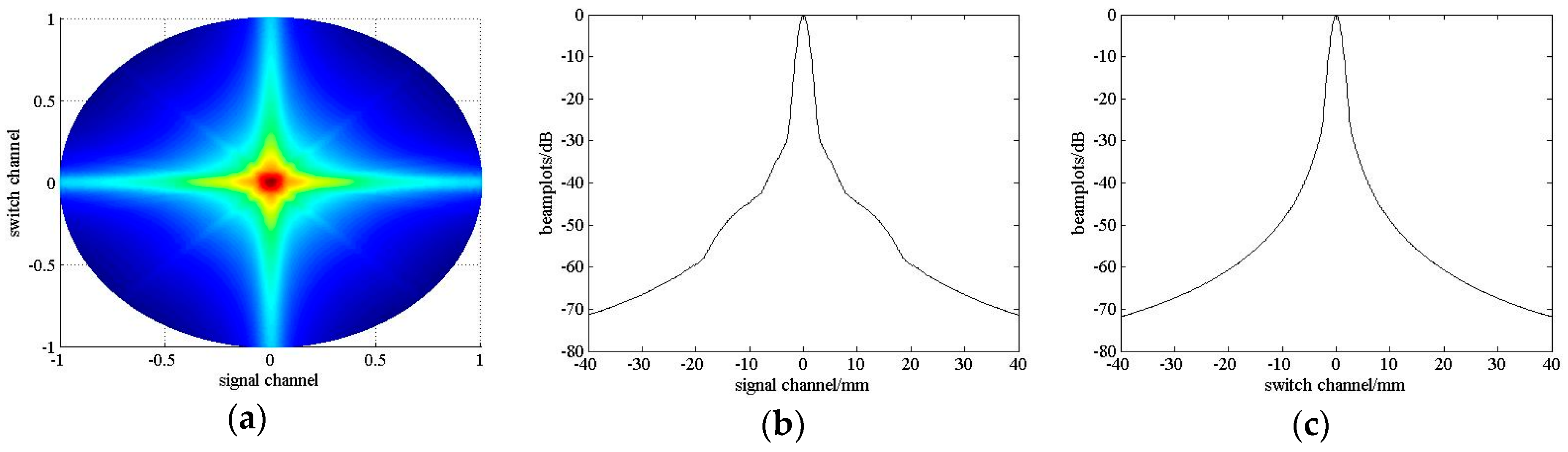
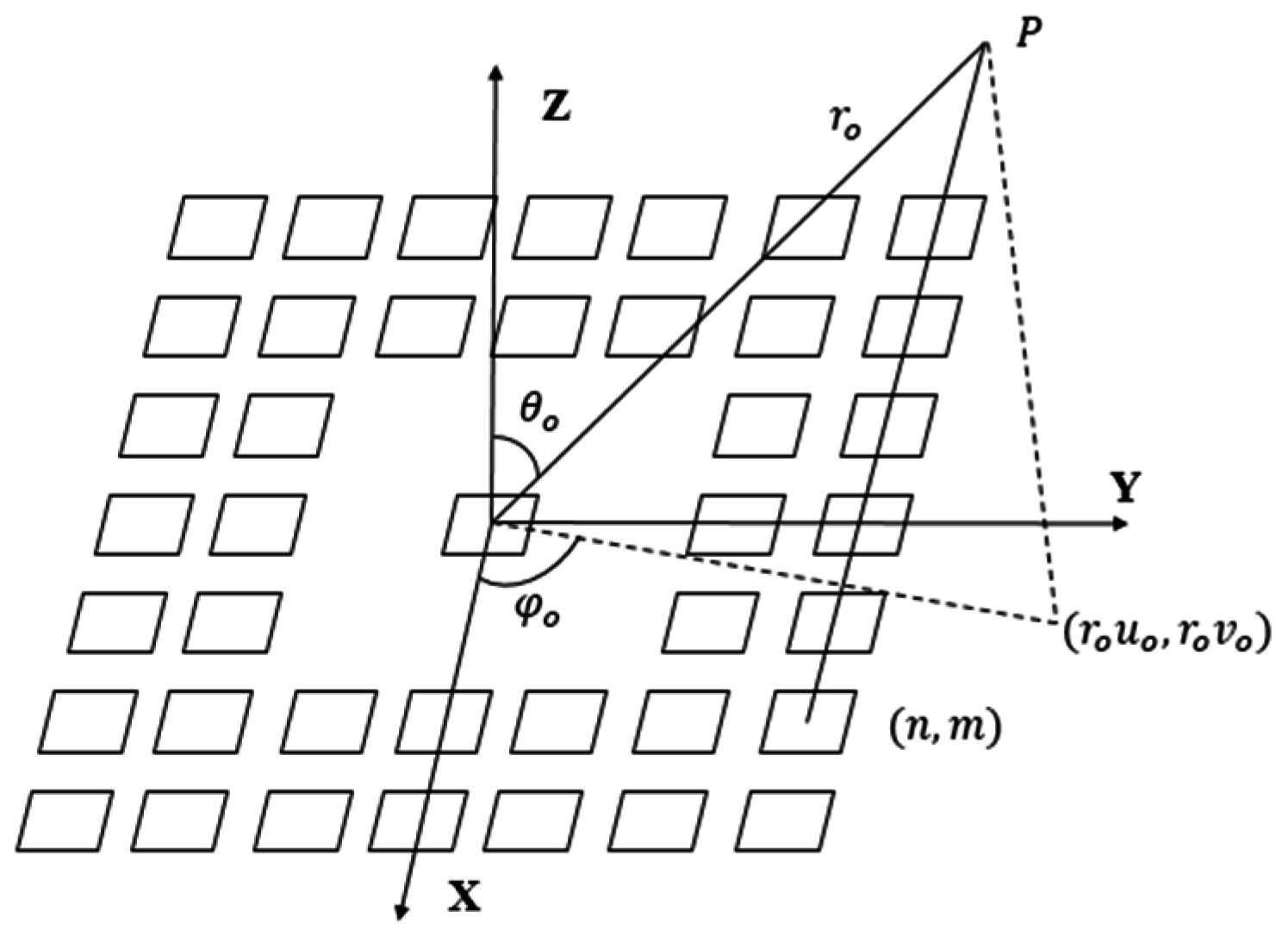
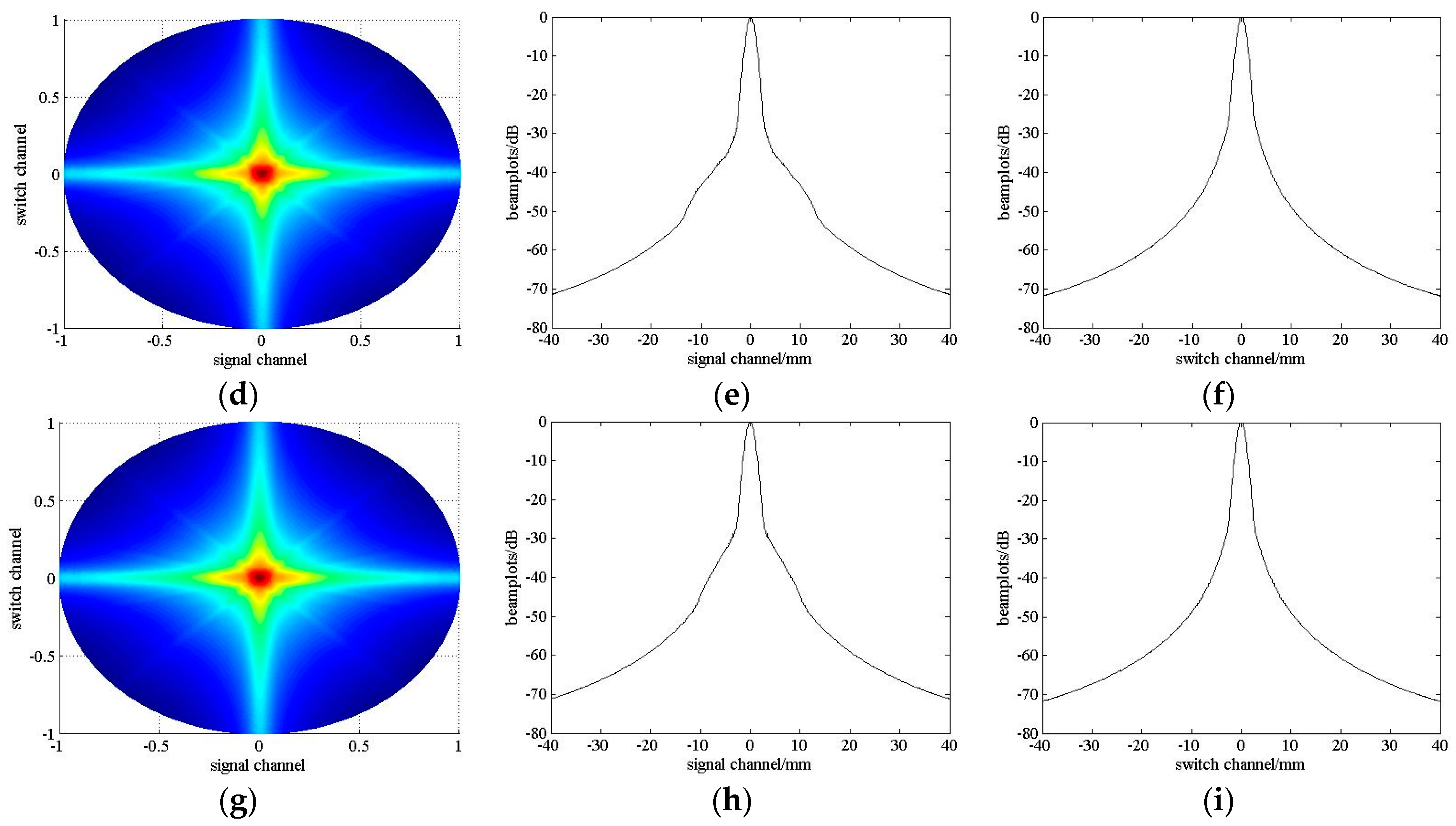
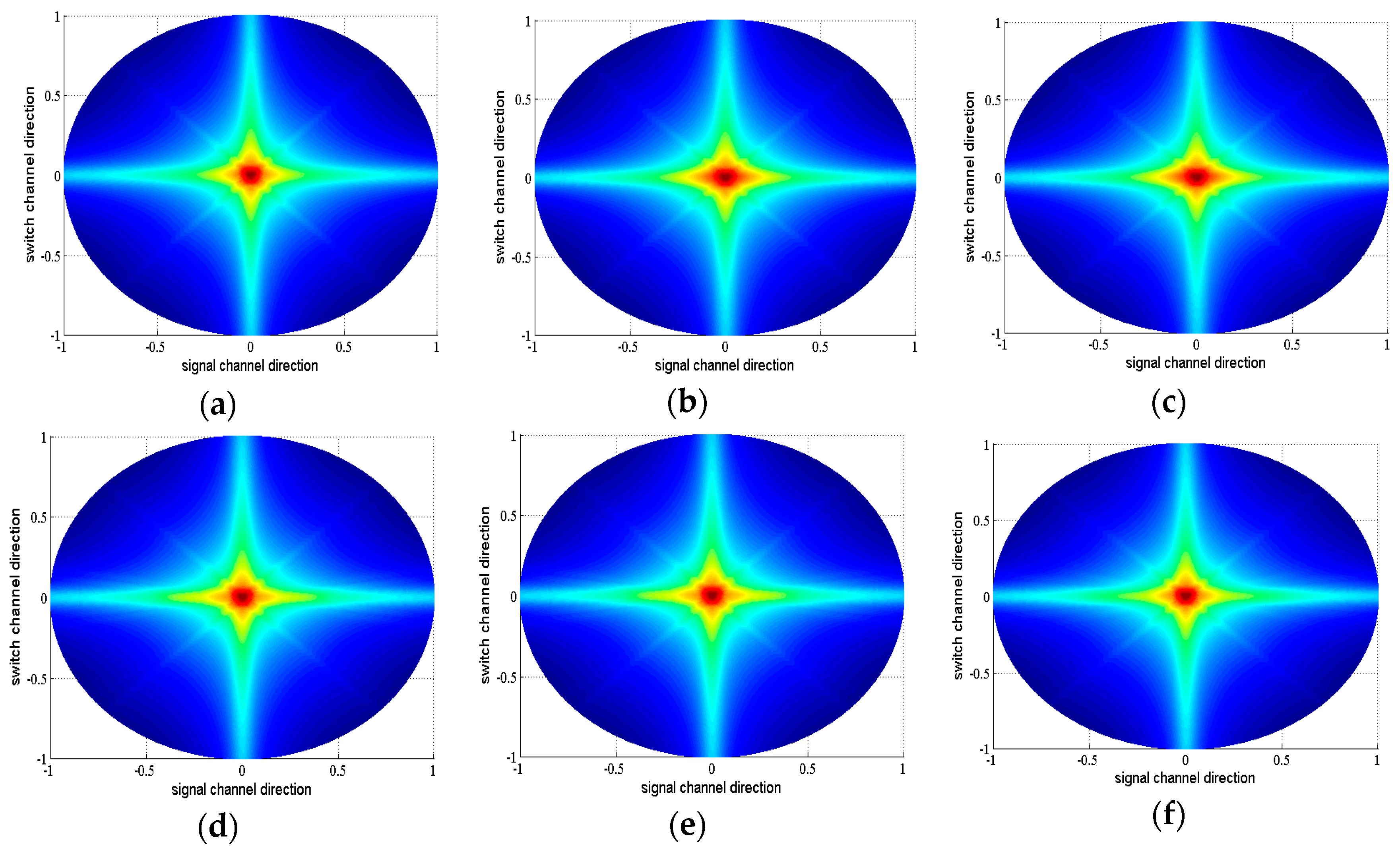
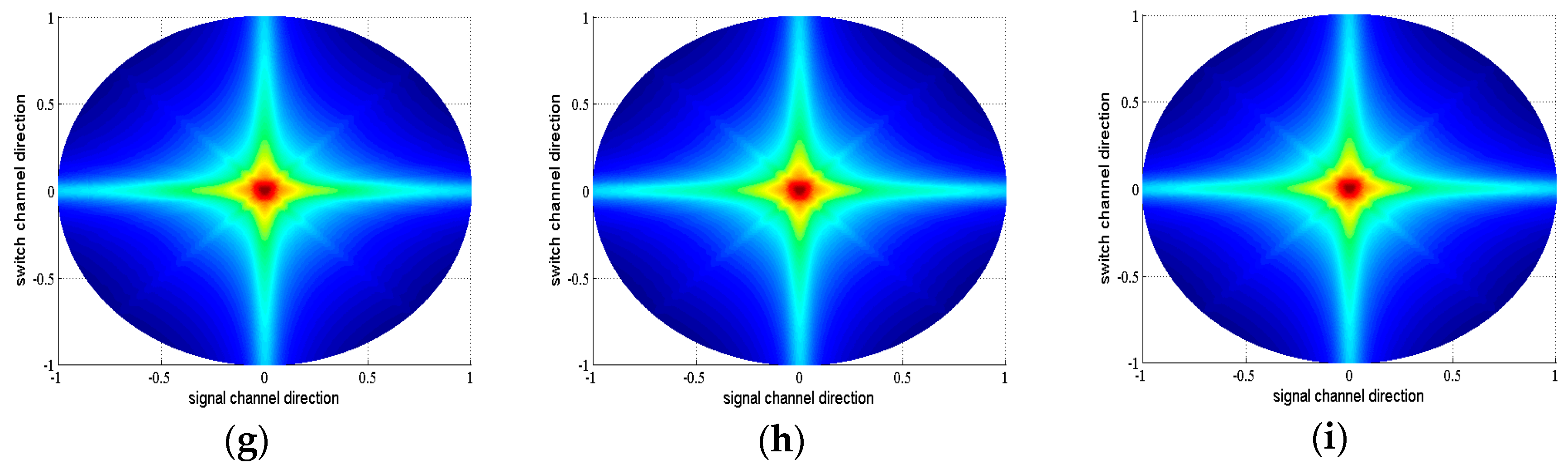
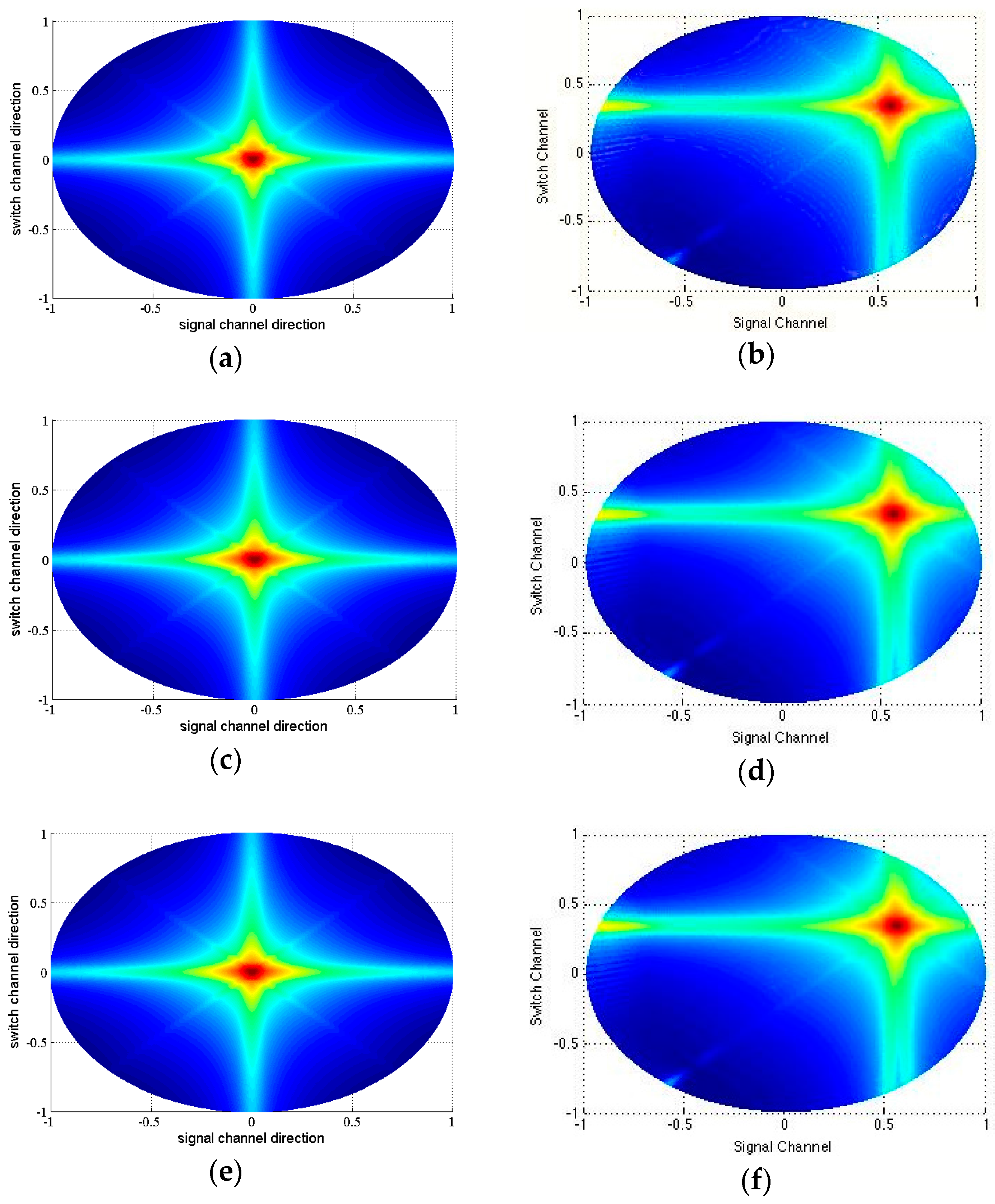
2.2. Two-Way Radiation Pattern of SRCA
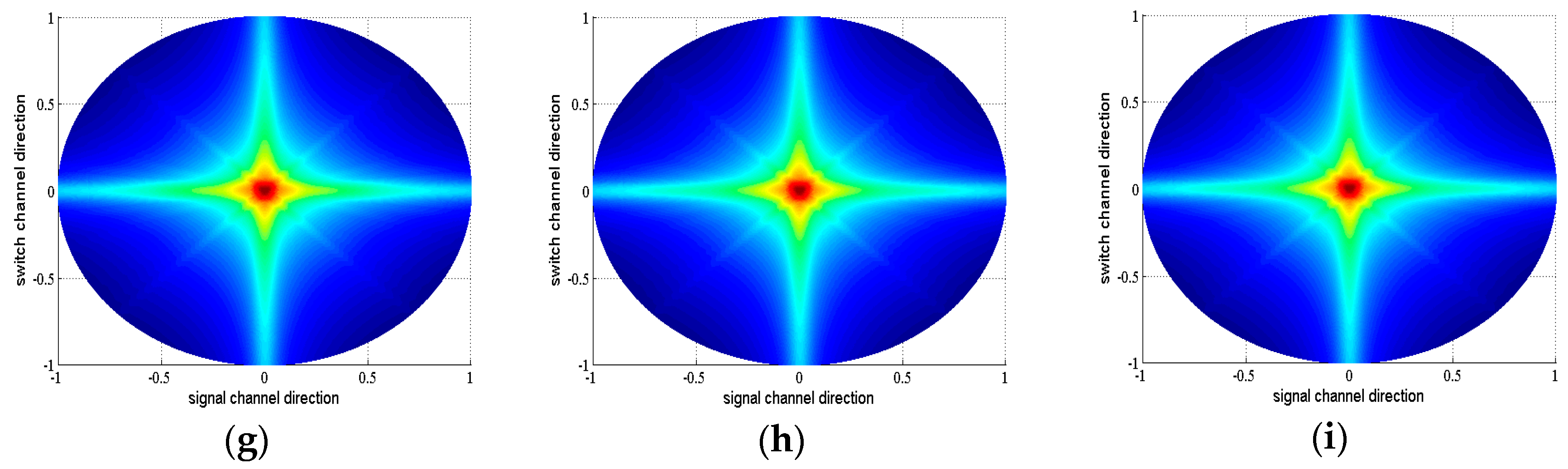
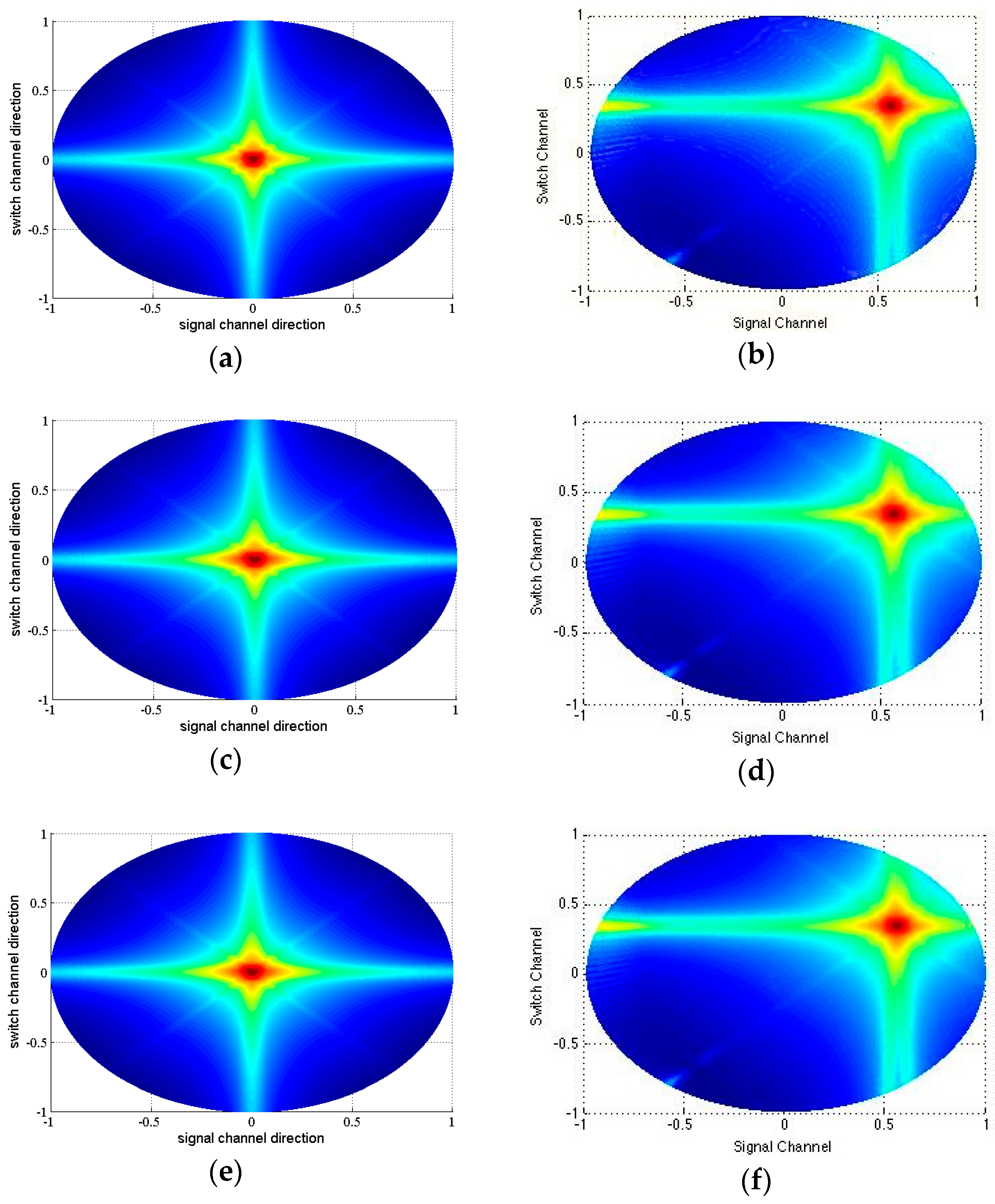
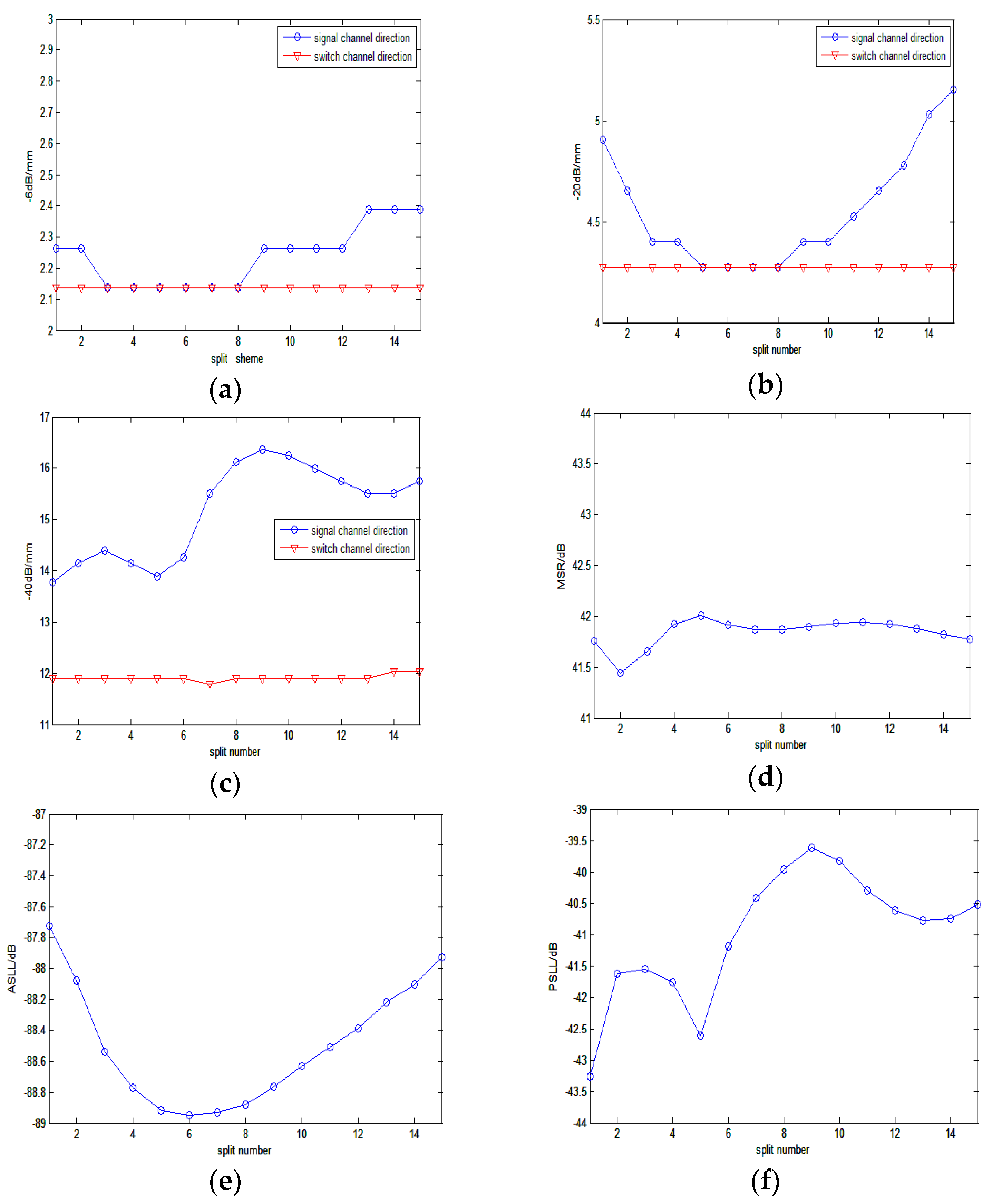
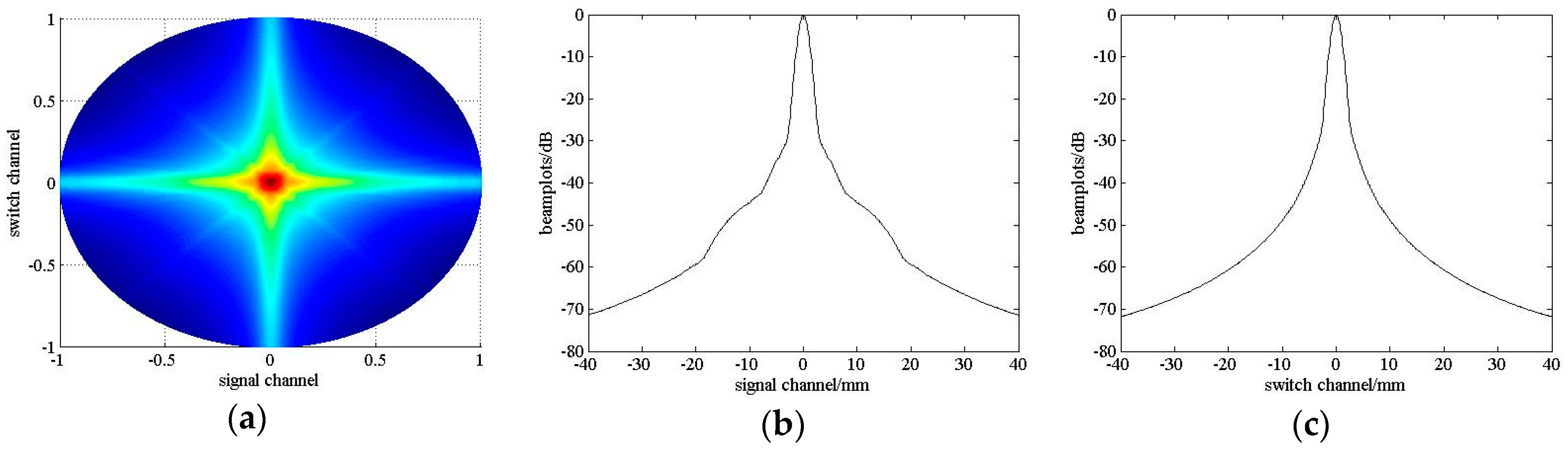
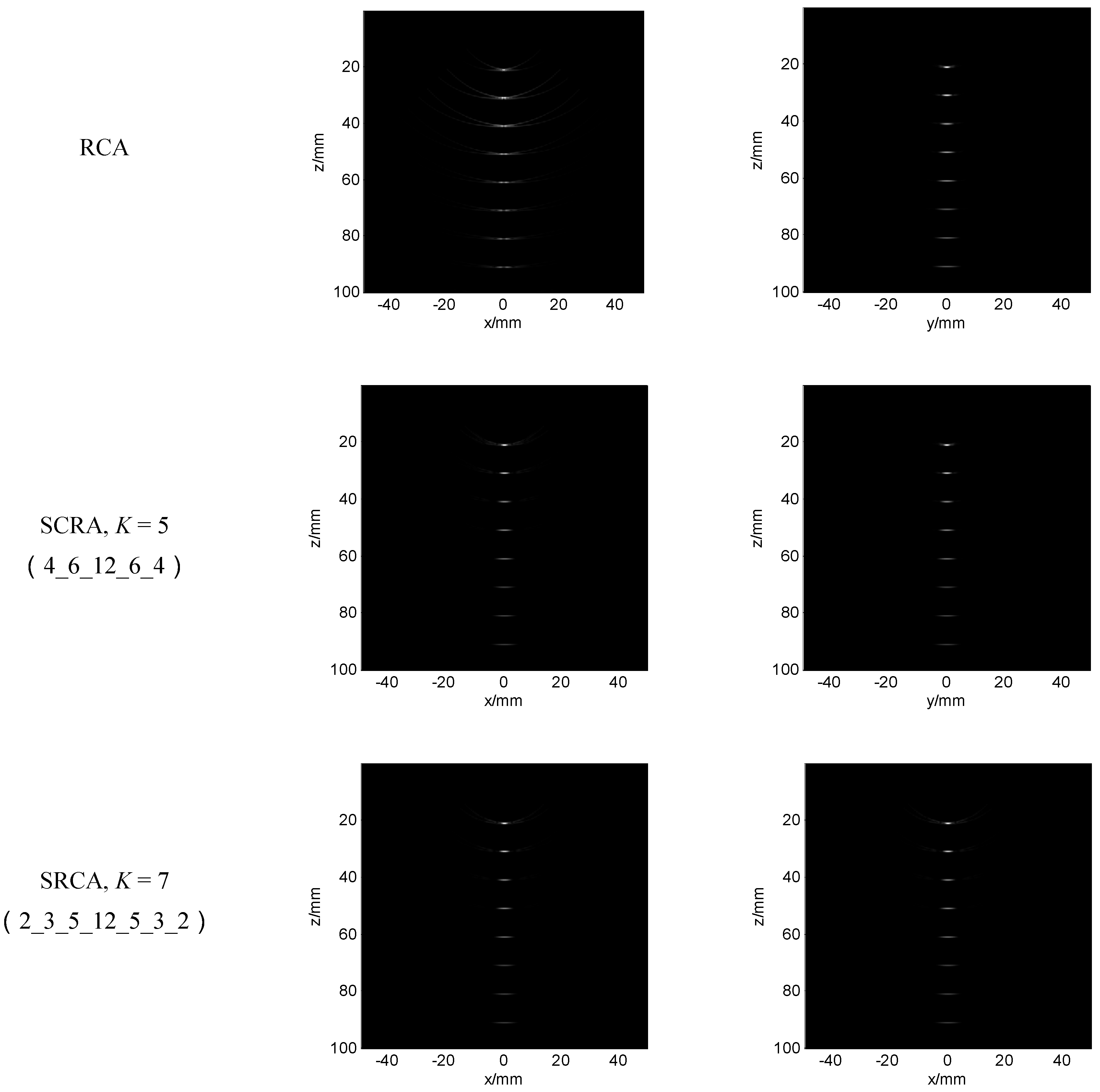
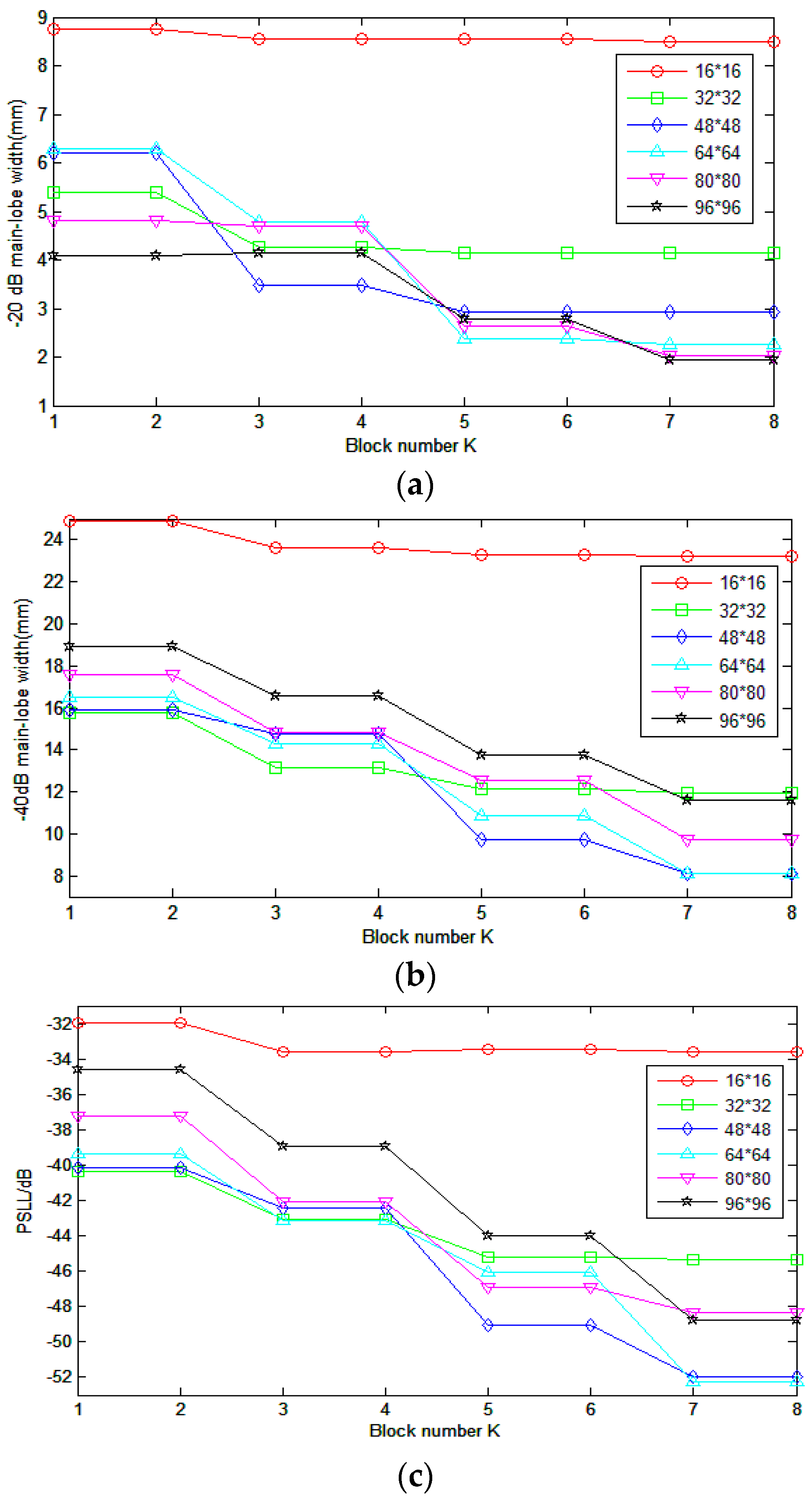
3. Results
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Fenster, A.; Downey, D.B. 3-D ultrasound imaging: A review. IEEE Eng. Med. Biol. 1996, 15, 44–49. [Google Scholar] [CrossRef]
- Smith, S.W.; Pavy, H.G.; von Ramm, O.T. High-speed ultrasound volumetric imaging system—Part I: Transducer designand beam steering. IEEE Trans. Ultrason. Ferro. Freq. Control 1991, 38, 100–108. [Google Scholar] [CrossRef] [PubMed]
- von Ramm, O.T.; Smith, S.W.; Puly, H. High-speed ultrasound volumetric imaging system—Part II: Parallel processing and image display. IEEE Trans. Ultrason. Ferro. Freq. Control 1991, 38, 109–115. [Google Scholar] [CrossRef] [PubMed]
- Smith, S.W.; Davidsen, R.E.; Emery, S.D.; Goldberg, R.L.; Light, E.D. Update on 2-D array transducers for medical. Proc. IEEE Ultrasound Symp. 1995, 7–10, 1273–1278. [Google Scholar]
- Yen, J.T.; Smith, S.W. Real-time rectilinear volumetric imaging. IEEE Trans. Ultrason. Ferro. Freq. Control 2002, 49, 114–124. [Google Scholar] [CrossRef]
- Yang, P.; Guo, J.T.; Shi, K.R. Progress in 3-D imaging by 2-D phased array. Nondestruct. Test. 2007, 29, 177–184. [Google Scholar]
- Karaman, M.; Wygant, I.O.; Oralkan, O.; Khuri-Yakub, B.T. Minimally redundant 2-D array designs for 3-D medical ultrasound imaging. IEEE Trans. Med. Imaging 2009, 28, 1051–1061. [Google Scholar] [CrossRef] [PubMed]
- Demore, C.M.; Joyce, A.W.; Wall, K.; Lockwood, G.R. Real-time volume imaging using a crossed electrode array. IEEE Trans. Ultrason. Ferro. Freq. Control 2009, 56, 1252–1261. [Google Scholar] [CrossRef] [PubMed]
- Lockwood, G.R.; Foster, F.S. Optimizing sparse two-dimensional transducer arrays using an effective aperture approach. Proc. IEEE Ultrasound Symp. 1994, 3, 1497–1501. [Google Scholar]
- Turnbull, D.H.; Foster, F.S. Beam steering with pulsed two-dimensional transducer arrays. IEEE Trans. Ultrason. Ferro. Freq. Control 1991, 38, 320–333. [Google Scholar] [CrossRef] [PubMed]
- Lockwood, G.R.; Foster, F.S. Optimizing the radiation pattern of sparse periodic two-dimensional arrays. IEEE Trans. Ultrason. Ferro. Freq. Control 1996, 43, 15–19. [Google Scholar] [CrossRef]
- Tweedie, A.V.; Hayward, G. Aperiodic and deterministic 2-D phased array structures for ultrasonic imaging. In Proceedings of the 2009 IEEE Ultrasonics Symposium, Scotland, UK, 20–23 September 2009; pp. 406–409.
- Sumanaweera, T.S.; Schwartz, J.; Napolitano, D. A spiral 2-D phased array for 3-D imaging. In Proceedings of the 1999 IEEE Ultrasonics Symposium, San Francisco, CA, USA, 17–20 October 1999; pp. 1271–1274.
- Johnson, J.A.; Karaman, M.T.; Khuri-Yakub, B. Coherent-array imaging using phased subarrays. Part I: Basic principles. IEEE Trans. Ultrason. Ferro. Freq. Control 2006, 52, 37–50. [Google Scholar] [CrossRef] [Green Version]
- Johnson, J.A.; Oralkan, O.; Ergun, S.; Demirci, U.; Karaman, M.T.; Khuri-Yakub, B. Coherent-array imaging using phased subarrays. Part II: Simulations and experimental results. IEEE Trans. Ultrason. Ferro. Freq. Control 2006, 52, 51–64. [Google Scholar] [CrossRef]
- Rasmussen, M.F.; Christiansen, T.L.; Thomsen, E.V.; Jensen, J.A. 3-D imaging using row-column-addressed arrays with integrated apodization. Part I: Apodization design and line element beamforming. IEEE Trans. Ultrason. Ferro. Freq. Control 2015, 62, 947–958. [Google Scholar] [CrossRef] [PubMed]
- Christiansen, T.L.; Rasmussen, M.F.; Bagge, J.P.; Moesner, L.N.; Jensen, J.A.; Thomsen, E.V. 3-D imaging using row-column-addressed arrays with integrated apodization. Part II: Transducer fabrication and experimental results. IEEE Trans. Ultrason. Ferro. Freq. Control 2015, 62, 959–971. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Yang, J.L.; Ding, M.Y.; Yuchi, M. Preliminary work of real-time ultrasound imaging system for 2-D array transducer. In Proceedings of the 4th International Conference on Biomedical Engineering and Biotechnology—Frontiers in Biomedical Engineering and Biotechnology, Shanghai, China, 18–21 August 2015; pp. 1579–1585.
- Li, X.; Song, J.; Wu, Q.; Zhu, B.; Jiang, S.; Ding, M.; Yuchi, M. A preliminary work on pre-beam formed data acquisition system for ultrasound imaging with 2-D transducer. In Proceedings of the SPIE 9040, Medical Imaging 2014: Ultrasonic Imaging and Tomography, Wuhan, China, 10–24 February 2014.
- Morton, C.E.; Lockwood, G.R. Theoretical assessment of a crossed electrode 2-D array for 3-D imaging. In Proceedings of the 2003 IEEE Ultrasonics Symposium, Honolulu, HI, USA, 5–8 October 2003; pp. 968–971.
- Daher, N.M.; Yen, J.T. Rectilinear 3-D ultrasound imaging using synthetic aperture techniques. In Proceedings of the 2004 IEEE Ultrasonics Symposium, Los Angeles, CA, USA, 23–27 August 2004; pp. 1270–1273.
- Daher, N.M.; Yen, J.T. 2-D Array for 3-D ultrasound imaging using synthetic aperture techniques. IEEE Trans. Ultrason. Ferro. Freq. Control 2006, 53, 912–924. [Google Scholar] [CrossRef]
- Seo, C.H.; Yen, J.T. 64 × 64 2-D array transducer with row-column addressing. In Proceedings of the 2016 IEEE Ultrasonics Symposium, Los Angeles, CA, USA, 2–6 October 2006; pp. 74–77.
- Seo, C.H.; Yen, J.T. A 256 × 256 2-D array transducer with row-column addressing for 3-D rectilinear imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2009, 56, 837–847. [Google Scholar] [PubMed]
- Logan, A.S.; Wong, L.-L.P.; Chen, A.I.H.; Yeow, J.-T.W. A 32 × 32 element row-column addressed capacitive micromachined ultrasonic transducer. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2011, 58, 1266–1271. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Yang, J.; Li, X.; Zhong, X.; Song, J.; Ding, M.; Yuchi, M. Real-time 3-D image reconstruction of a 24 × 24 row-column addressing array: From raw data to image. In Proceedings of the SPIE 9790, Medical Imaging 2016: Ultrasonic Imaging and Tomography, Wuhan, China, 16–28 February 2016.
- Zhong, X.; Li, X.; Yang, J.; Li, C.; Song, J.; Ding, M.; Yuchi, M. A preliminary evaluation work on a 3-D ultrasound imaging system for 2-D array transducer. In Proceedings of the SPIE 9790, Medical Imaging 2016: Ultrasonic Imaging and Tomography, Wuhan, China, 16–28 February 2016.
- Weber, K.; Schmitt, R.; Tylkowski, B. Optimization of random sparse 2-D transducer arraysfor 3-D electronic beam steering and focusing. In Proceedings of the 1997 IEEE Ultrasonics Symposium, Ingbert, Germany, 31 October–3 November1994; pp. 1503–1506.
- Villazon, J.; Ibanez, A.; Parrilla, M. Design method for large 2-D ultrasonic arrays with controlled grating lobes levels. In Proceedings of the 2008 IEEE Ultrasonics Symposium, Arganda del Rey, Spain, 2–5 November 2008; pp. 1520–1523.
- Trucco, A. Weighting and thinning wide-band arrays by simulated annealing. Ultrasonics 2002, 40, 485–489. [Google Scholar] [CrossRef]
- Holm, S.; Elgetun, B.; Dahl, G. Properties of the beam pattern of weight and layout optimized sparse arrays. IEEE Trans. Ultrason. Ferro. Freq. Control 1997, 44, 983–991. [Google Scholar] [CrossRef]
- Jia, Y.; Lv, L.; Ding, M.; Yuchi, M. The design of split row-column addressing array for 2-D transducer. In Proceedings of the SPIE 9040, Medical Imaging 2014: Ultrasonic Imaging and Tomography, Wuhan, China, 10–24 February 2014.
- Lockwood, G.R.; Li, P.-C.; Donnell, M.O.; Foster, F.S. Optimizing the radiation pattern of sparse periodic linear arrays. IEEE Trans. Ultrason. Ferro. Freq. Control 1996, 43, 7–14. [Google Scholar] [CrossRef]
- Jensen, J.A.; Svendsen, B. Calculation of pressure fields from arbitrarily shaped, apodized, and excited ultrasound transducers. IEEE Trans. Ultrason. Ferro. Freq. Control 1992, 39, 262–267. [Google Scholar] [CrossRef] [PubMed] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Split Scheme | Z1 | Z2 | Z3 |
|---|---|---|---|
| 1 | 1 | 30 | 1 |
| 2 | 2 | 28 | 2 |
| 3 | 3 | 26 | 3 |
| 4 | 4 | 24 | 4 |
| 5 | 5 | 22 | 5 |
| 6 | 6 | 20 | 6 |
| 7 | 7 | 18 | 7 |
| 8 | 8 | 16 | 8 |
| 9 | 9 | 14 | 9 |
| 10 | 10 | 12 | 10 |
| 11 | 11 | 10 | 11 |
| 12 | 12 | 8 | 12 |
| 13 | 13 | 6 | 13 |
| 14 | 14 | 4 | 14 |
| 15 | 15 | 2 | 15 |
| 32 × 32 Array | Signal Channel | Switch Channel | MSR/dB | ASLL/dB | PSLL/dB | ||||
|---|---|---|---|---|---|---|---|---|---|
| 6 dB/mm | 20 dB/mm | −40 dB/mm | 6 dB/mm | 20 dB/mm | −40 dB/mm | ||||
| FSA | 2.1382 | 4.1492 | 11.7812 | 2.1382 | 4.1492 | 11.7812 | 43.2389 | −89.4689 | −45.555 |
| SRCA No. 5 | 2.1382 | 4.2748 | 13.8919 | 2.1382 | 4.2748 | 11.9056 | 42.0046 | −88.9165 | −42.6212 |
| SRCA No. 7 | 2.1382 | 4.2748 | 15.4993 | 2.1382 | 4.2748 | 11.9056 | 41.8641 | −88.9310 | −40.4109 |
| SRCA No. 9 | 2.2639 | 4.4004 | 16.3621 | 2.1382 | 4.2748 | 11.9056 | 41.9001 | −88.7653 | −39.6194 |
| 32 × 32 Array | Signal Channel | Switch Channel | MSR/dB | ASLL/dB | PSLL/dB | ||||
|---|---|---|---|---|---|---|---|---|---|
| 6 dB/mm | 20 dB/mm | −40 dB/mm | 6 dB/mm | 20 dB/mm | −40 dB/mm | ||||
| FSA | 2.1382 | 4.1492 | 11.7812 | 2.1382 | 4.1492 | 11.7812 | 43.2389 | −89.4689 | −45.555 |
| RCA | 2.3896 | 5.4048 | 15.7460 | 2.1382 | 4.2748 | 12.0300 | 41.7244 | −87.8196 | −40.3320 |
| SRCA K = 2 | 2.3896 | 5.4048 | 15.7460 | 2.1382 | 4.2748 | 12.0300 | 41.7274 | −87.8137 | −40.3680 |
| SRCA K = 3 | 2.1382 | 4.2748 | 13.8919 | 2.1382 | 4.2748 | 11.9056 | 42.0046 | −88.9165 | −42.6212 |
| SRCA K = 4 | 2.1382 | 4.2748 | 13.1480 | 2.1382 | 4.2748 | 11.9056 | 42.2744 | −88.9992 | −43.0785 |
| SRCA K = 5 | 2.1382 | 4.1492 | 12.1543 | 2.1382 | 4.1492 | 11.7812 | 42.7626 | −89.1944 | −45.1773 |
| SRCA K = 6 | 2.1382 | 4.2748 | 12.0300 | 2.1382 | 4.1492 | 11.7812 | 42.7900 | −89.2428 | −45.0941 |
| SRCA K = 7 | 2.1382 | 4.1492 | 11.9056 | 2.1382 | 4.1492 | 11.7812 | 43.1147 | −89.2874 | −45.3423 |
| SRCA K = 8 | 2.1382 | 4.1492 | 11.7812 | 2.1382 | 4.1492 | 11.7812 | 43.1320 | −89.3303 | −45.3421 |
| 32 × 32 Array | Signal Channel | Switch Channel | MSR/dB | ASLL/dB | PSLL/dB |
|---|---|---|---|---|---|
| −6 dB/mm | −6 dB/mm | ||||
| FSA_45_45 | 2.1679 | 2.1679 | 43.6788 | −89.1404 | −45.377 |
| RCA_45_45 | 2.3913 | 2.1679 | 41.9898 | −87.6176 | −40.1320 |
| SRCA_45_45 K = 5 | 2.1679 | 2.1679 | 42.7874 | −89.6136 | −45.1280 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Jia, Y.; Ding, M.; Yuchi, M. The Design and Analysis of Split Row-Column Addressing Array for 2-D Transducer. Sensors 2016, 16, 1592. https://doi.org/10.3390/s16101592
Li X, Jia Y, Ding M, Yuchi M. The Design and Analysis of Split Row-Column Addressing Array for 2-D Transducer. Sensors. 2016; 16(10):1592. https://doi.org/10.3390/s16101592
Chicago/Turabian StyleLi, Xu, Yanping Jia, Mingyue Ding, and Ming Yuchi. 2016. "The Design and Analysis of Split Row-Column Addressing Array for 2-D Transducer" Sensors 16, no. 10: 1592. https://doi.org/10.3390/s16101592