1. Introduction
Over the past twenty years, several kinds of indoor navigation technologies have been developed based on various methods and theories [
1]. This technological trend has changed and evolved quickly due to the growth of smart and wearable devices as well as advanced access points (AP). The ubiquitous smartphone has many kinds of internal micro-electro mechanical system (MEMS) sensors, such as Global Navigation Satellite System (GNSS chips), accelerometers, gyros, magnetometers, barometers and cameras. Those sensors are the basic components of some mainstream indoor navigation technologies such as pedestrian dead reckoning (PDR), image-aided PDR and radio frequency (RF)-aided PDR. Thus, the smartphone has the natural potential to become the ideal personal and mobile navigator. The number of people using their smartphones’ navigational services have increased significantly, spurring the development of location-based service (LBS) and precise personal marketing. However, the problems associated with using smartphones for indoor pedestrian navigation, such as the low accuracy of MEMS sensors, non-repeatable and unstable MEMS error characteristics, GNSS-denied environments, and the imprecise predictability of human motion, have limited the effectiveness and subsequent popularity.
PDR is one of the most common methods for using inertial sensors to estimate two-dimensional positions for pedestrian navigation. Given an initial position, PDR uses a pedometer, step length model and heading sensor to obtain positions rather than constantly producing integral calculations like the inertial navigation system (INS). Because the model simplifies the 3D world into a 2D world, the impact of gravity projection on horizontal components in INS is eliminated in PDR. However, PDR errors accumulate with each step in a similar manner to the INS errors that accumulate over time. The estimated heading of PDR usually depends on the integration of the gyro angle rate or calculation from a magnetic field. Both of these methods, however, also have their inherent problems. It has long been understood that gyros’ readings are strongly affected by human motion because of the vibration noise and dynamic misalignment between sensor body frame and pedestrian frame, causing error drifts quickly after integration. In regard to headings based on magnetic fields, magnetic materials and environmental obstacles degrade the magnetometer’s reading, negatively influencing the accuracy of the calculated azimuth. In addition to the accuracy of the heading, most of the step length estimations derived from empirical formulas fail to accurately meet users’ various individual characteristics. For example, step length can vary by as much as 40% with different pedestrians when they are walking at the same speed, and by up to 50% across the range of walking speeds of an individual [
2]. Although tuning the parameters or calibration can enhance the accuracy in post-processing, it is inconvenient for real-time application. There is also the risk that the demonstration system performs better than the production system because of the uncertainty of the coefficients [
3]. In conclusion, the PDR suffers error drift similar to that of the INS mechanization in terms of position or orientation because of the accumulated step-by-step impact of inaccurate step length and heading estimation. Therefore, in order for the PDR to maintain accuracy in individual cases, a PDR system requires pre-calibration or post-processing for tuning parameters similar to those in the Kalman Filter (KF) and step length model. However, this adjustment of parameters is time-consuming. Another method is using occasional position corrections from an external (absolute) positioning system to maintain stable performance [
2]. Furthermore, PDR is a relative positioning system which needs an absolute coordinate for initialization.
Jeong-Min
et al. propose an integrated system comprised of PDR and beacon-type AP to maintain stable performance [
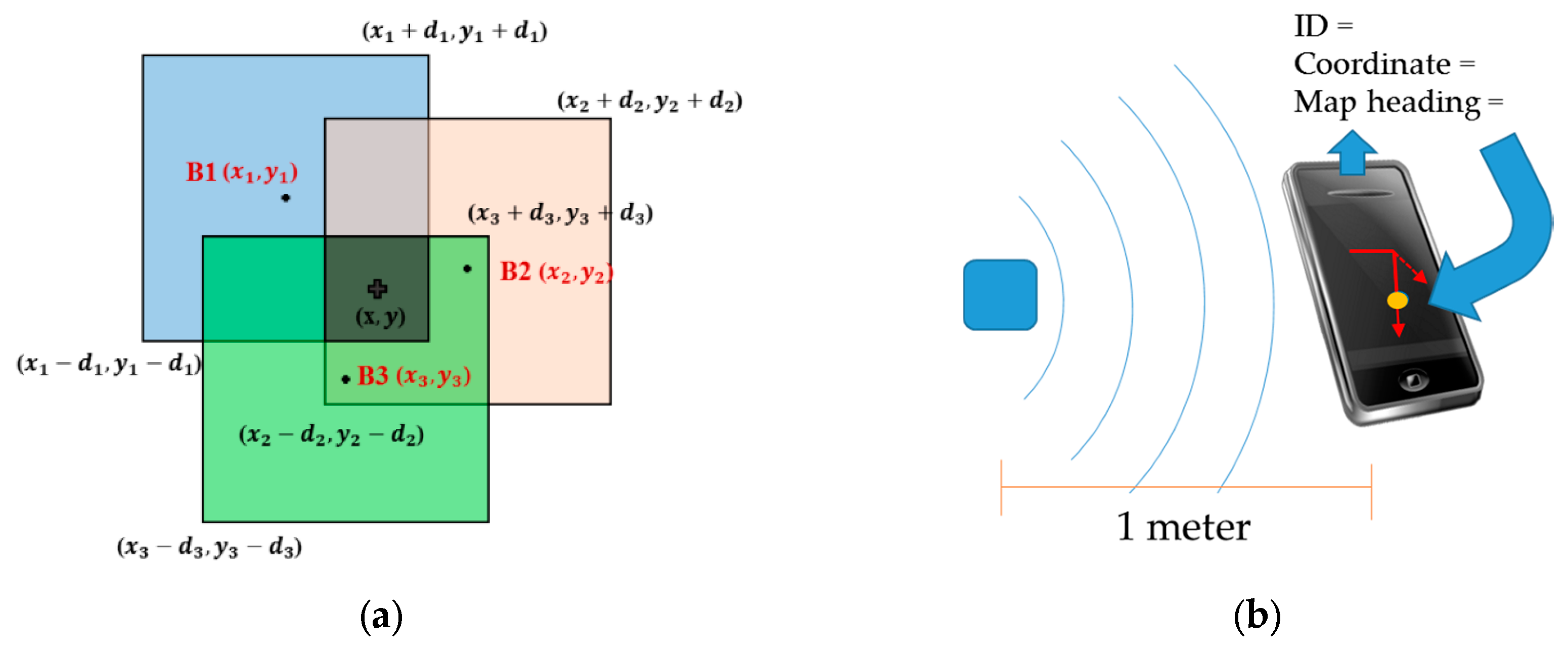
4]. The beacon-type APs’ system generates a Wi-Fi signal within a few meters of each AP as footprints where these APs are installed at the crossroad. With footprints covering all directions of a corridor, proximity is taken into account to obtain better accuracy than fingerprinting; this is accomplished by setting the threshold value of the received signal for triggering location-based events. The beacon-type Wi-Fi AP can be replaced by a Bluetooth beacon which can also determine positions using the proximity method. The newest version is Bluetooth 4.0, which includes the technology of Bluetooth Low-Energy (BLE). The broadcast of BLE avoids the channels that Wi-Fi generally uses, thus reducing interference. As the name suggests, it has lower power consumption (usually battery powered), low cost, lower air data rate, small size and easy distribution in any indoor environment, unlike the larger WiFi AP which needs to be placed near a power source. Faragher and Harle analyzed the accuracy of WiFi and BLE fingerprinting in a large indoor space with a highly-accurate ultrasonic ground truth referencing system [
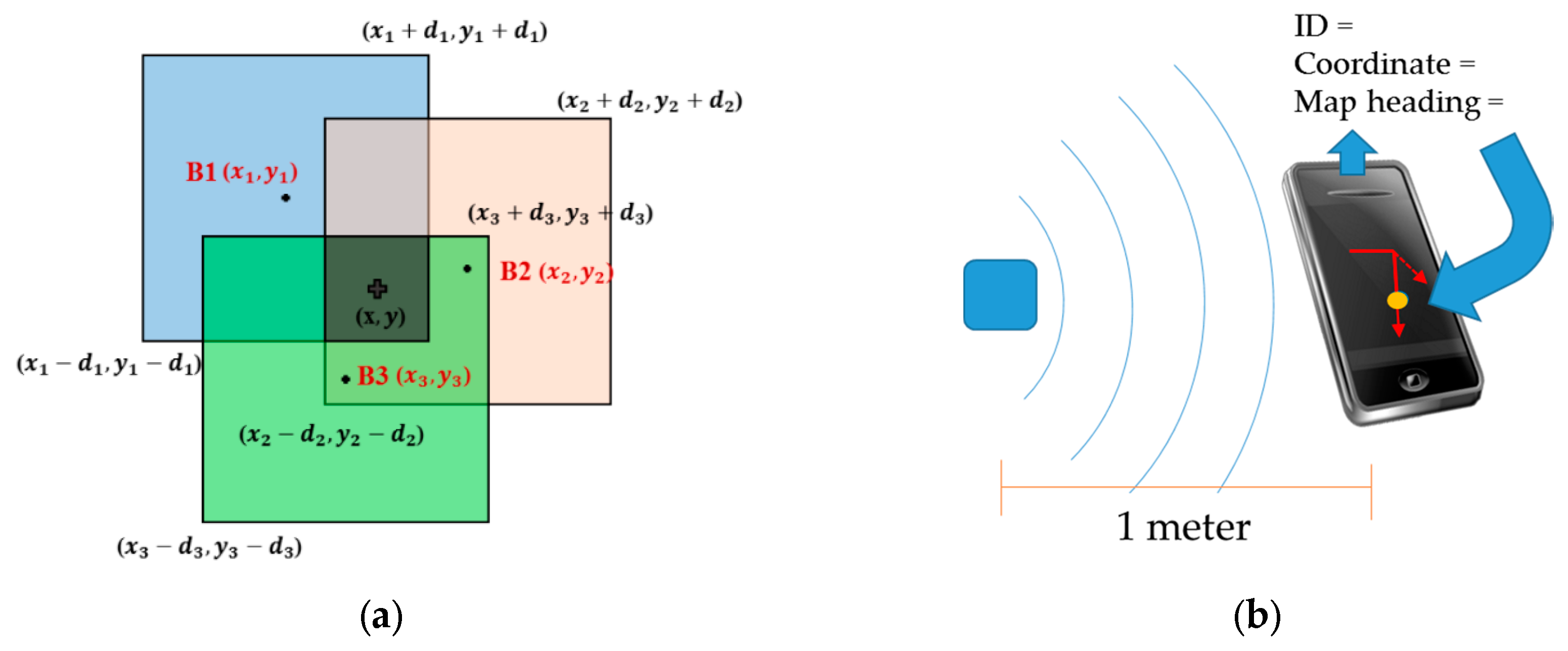
5]. They also analyzed the errors caused by the measurement noise, distance, walls and human bodies and concluded that the measurement of distance using BLE Received Signal Strength Indicator (RSSI) is very accurate within one meter because the signal strength decreases as the inverse square of the distance to the source. Thus, the proximity method eliminates the influence of multipath disturbance, the requirements of database construction and has strong performance within one meter; the battery-powered beacon is easy to distribute and the Bluetooth signal mitigates the signal interference. For these reasons, we settled upon a method using proximity and bounding box (for some initial positions that are far away from the proximity-type beacon) to the Bluetooth beacon to initialize at any position and update measurements instead of using Wi-Fi positioning and fingerprinting.
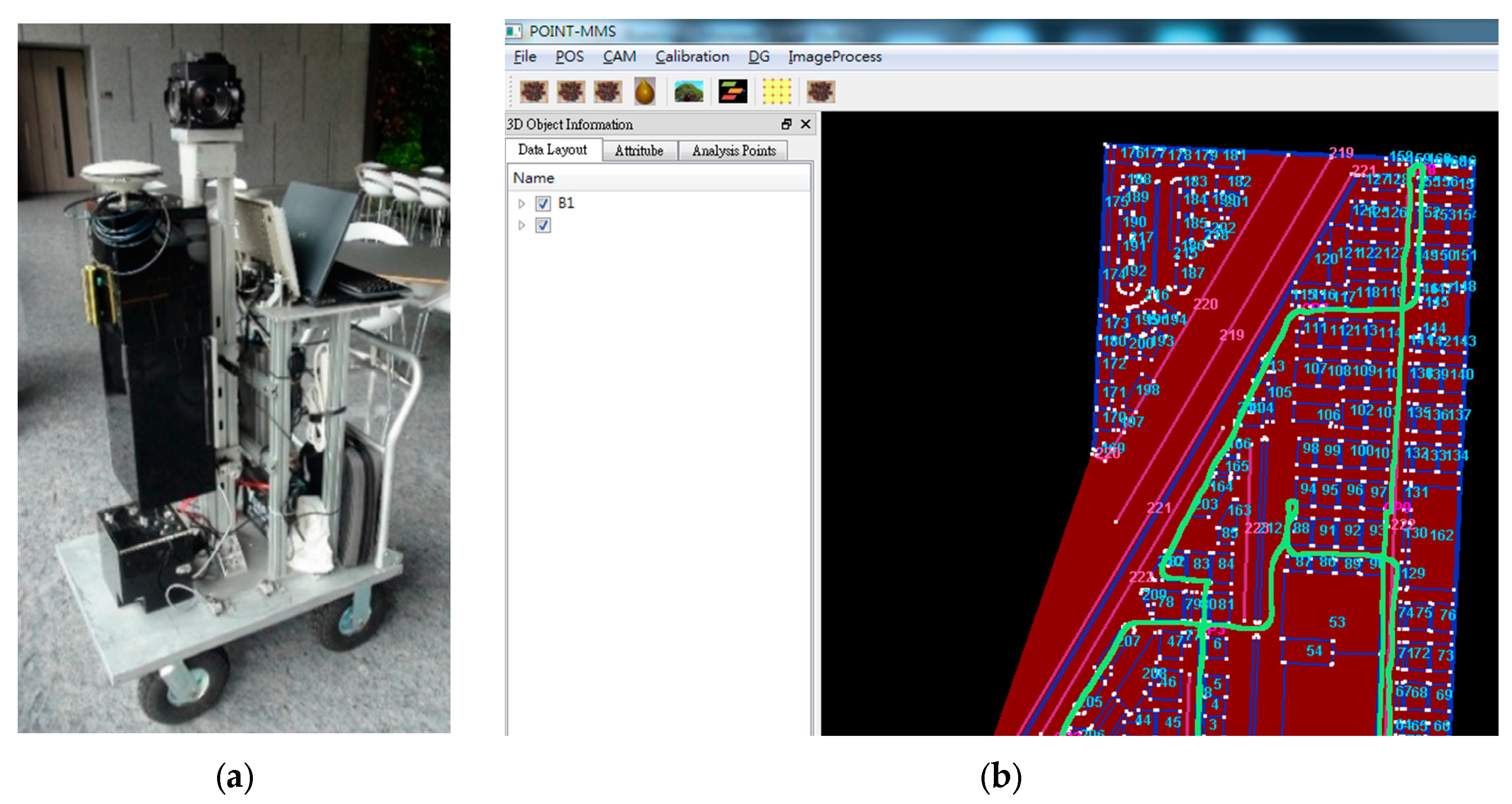
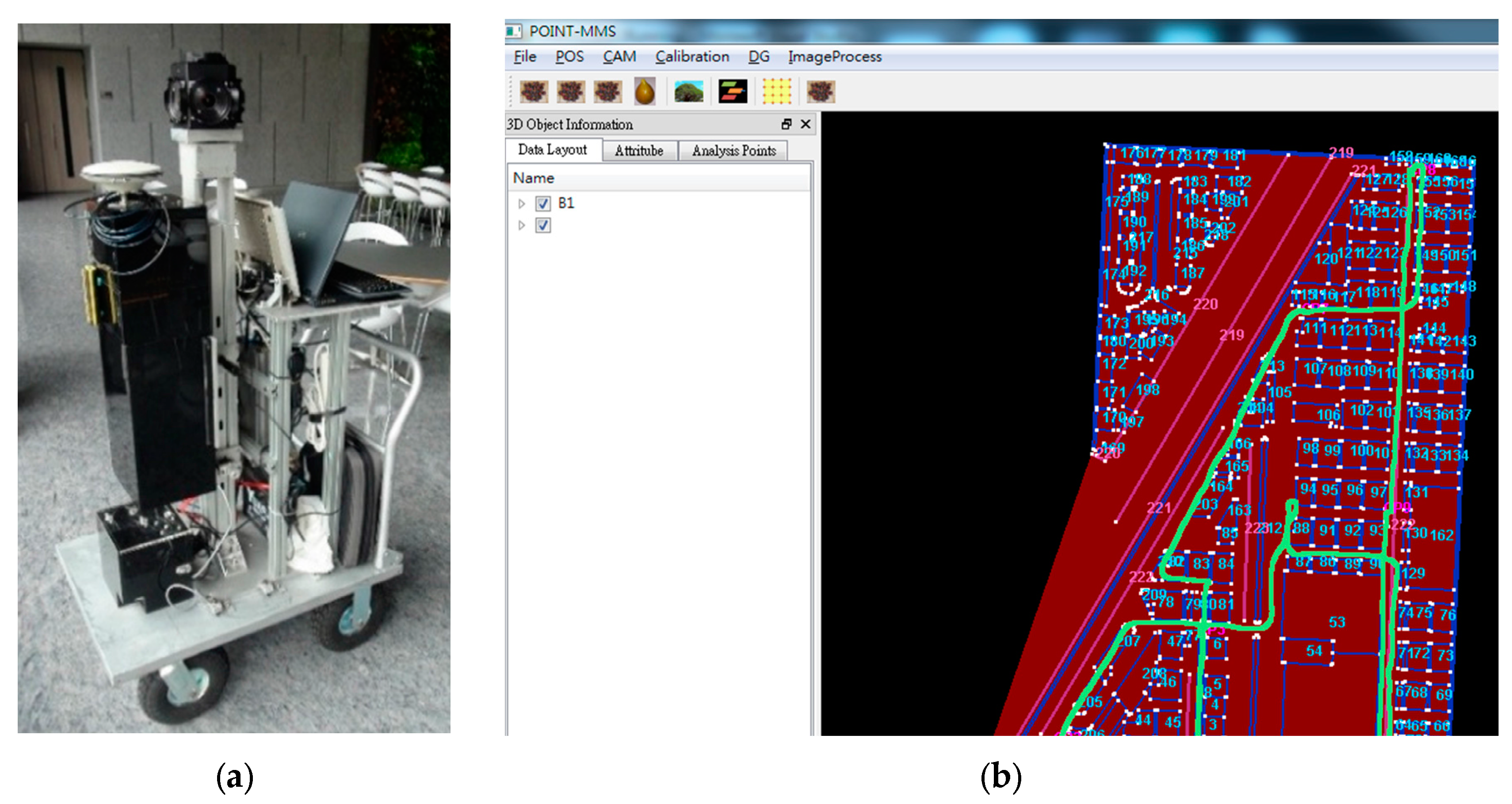
At present, maps and geospatial data are often used as an aiding source for navigation because of their reliability. They generally consist of nodes, polylines, polygons, individual IDs and attribute data in the format of XML or computer-aided drawing (CAD) files. The map formats become more consistent because of the development of the map-matching algorithm and standards of the map database; however, the traditional generation of a numerical map is time consuming and the matching algorithm seems complex. In addition, for such a crowdsourcing map database like OpenStreetMaps (OSM), there may be inaccuracies and precision problems, since the editors are not necessarily professionals. Thus, instead of using the aforementioned maps, the proposed system uses the reliable map surveyed by the self-developed Indoor Mobile Mapping System (IMMS). The IMMS quickly obtains the indoor map in the WGS84 coordinate system with high accuracy, depending on the advanced hardware and algorithm. The map format references OSM with some self-defined attributes. The theoretical basis of the map-matching algorithm generally includes topological relation [
6], probability map,
etc. The matching algorithm first projects the navigation solution onto the passageway or corridor both to constrain the error drift and provide boundaries to avoid crossing a wall. They use the previous position, velocity and heading from the navigation solution in combination with geospatial data to perform the required mathematics, such as determining minimum distance and weighted algorithms. Once these processes have been completed, the map matching decides the most likely location of the user. However, those traditional algorithms and mathematics are more complex and time consuming when they achieve higher accuracy. Link
et al. propose a novel footpath-matching algorithm that integrates their indoor maps with OSM which is thus similar to a rule-based system. To be specific, the algorithm implements the matching based on the footpath which is a route that consists of steps and corresponds with a step-by-step heading [
7].
Therefore, in order to combine map information, Bluetooth beacon and PDR with lower complexity, some logic algorithms have been applied in the attempt to further improve navigation accuracy. In the real world, many decision-making tasks are too complex to be understood quantitatively, but humans succeed by flexibly using knowledge that is imprecise rather than precise [
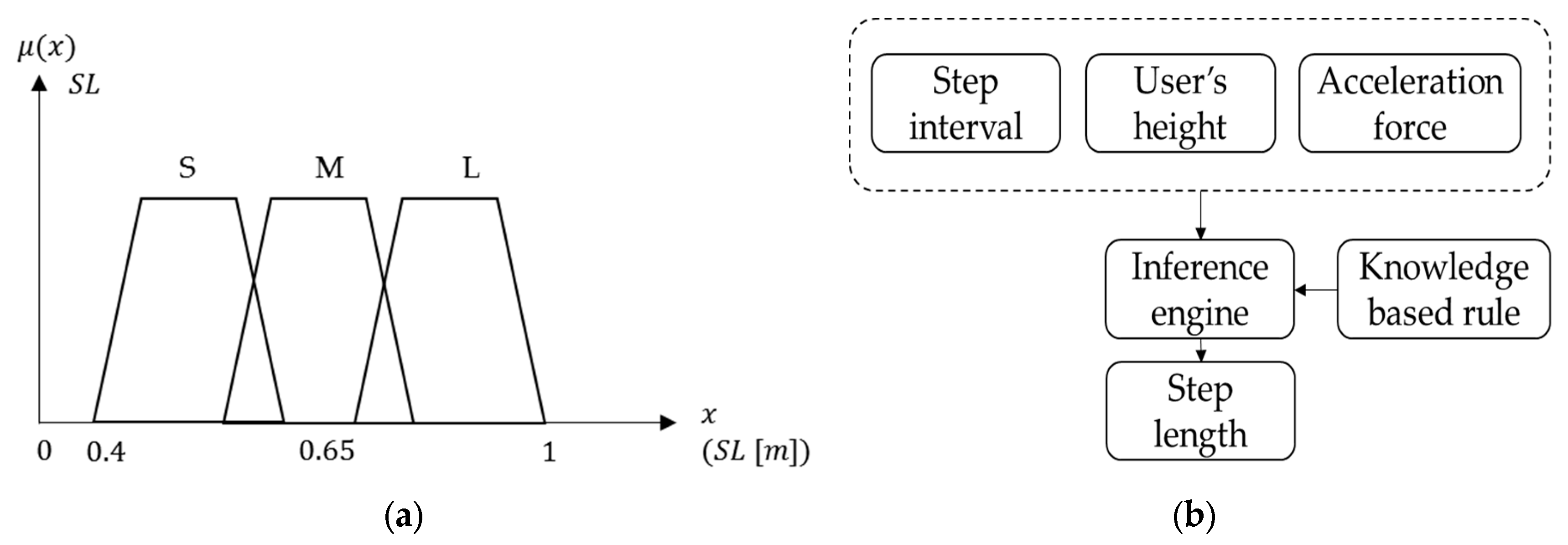
8]. Realizing this, Zadeh first proposed the concept of fuzzy logic in 1965, thus launching a system that often provides more appropriate and simplified expressions for interacting with applied systems than can be achieved by their more exact mathematical model counterparts. Fuzzy logic uses imprecise, abstract and subjective knowledge to generate decisions or to map general numerical ranges for specific systems; it behaves like human reasoning and cognition, generating useful and usable answers without the need for deep understanding, exact equations, and precise numerical values. In other words, it is suitable for systems with mathematical models that are ill defined and difficult to derive, and it allows decision making with estimated values using simple, nonlinear equations and rules with
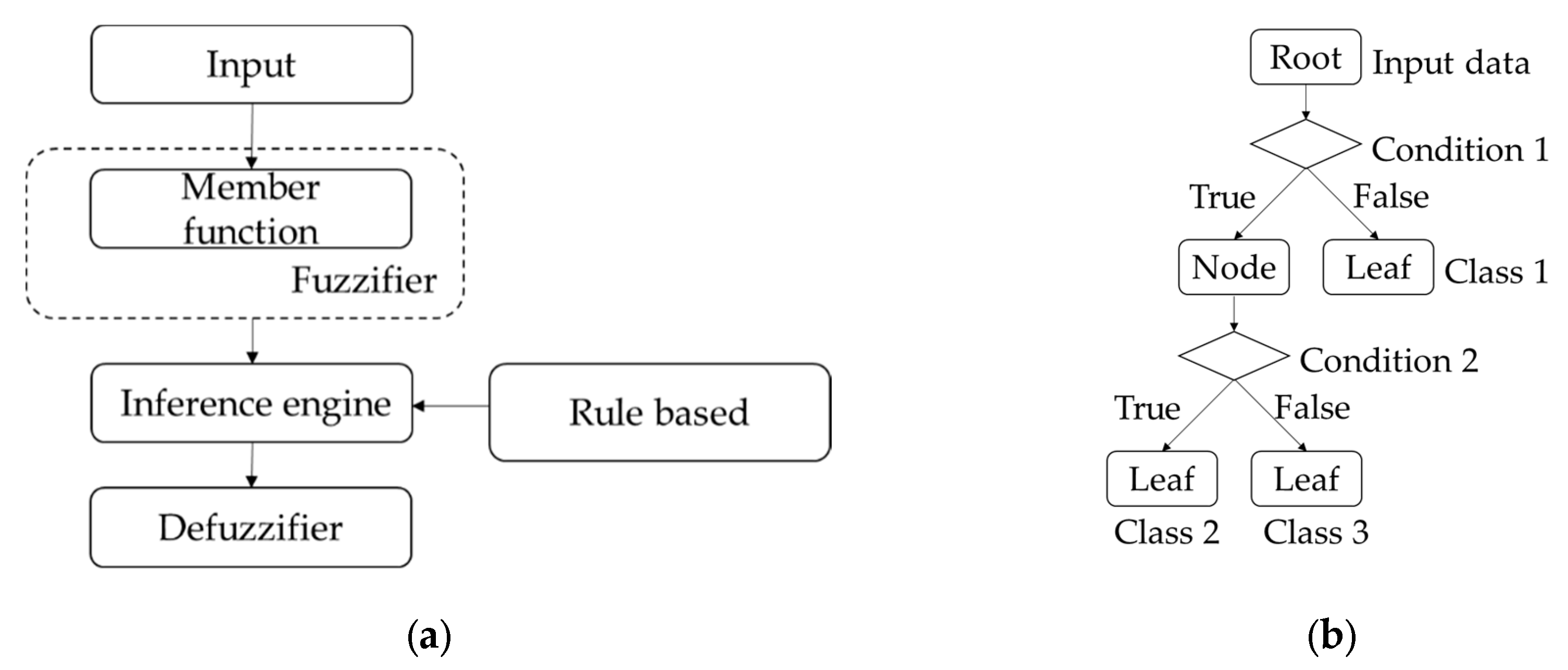
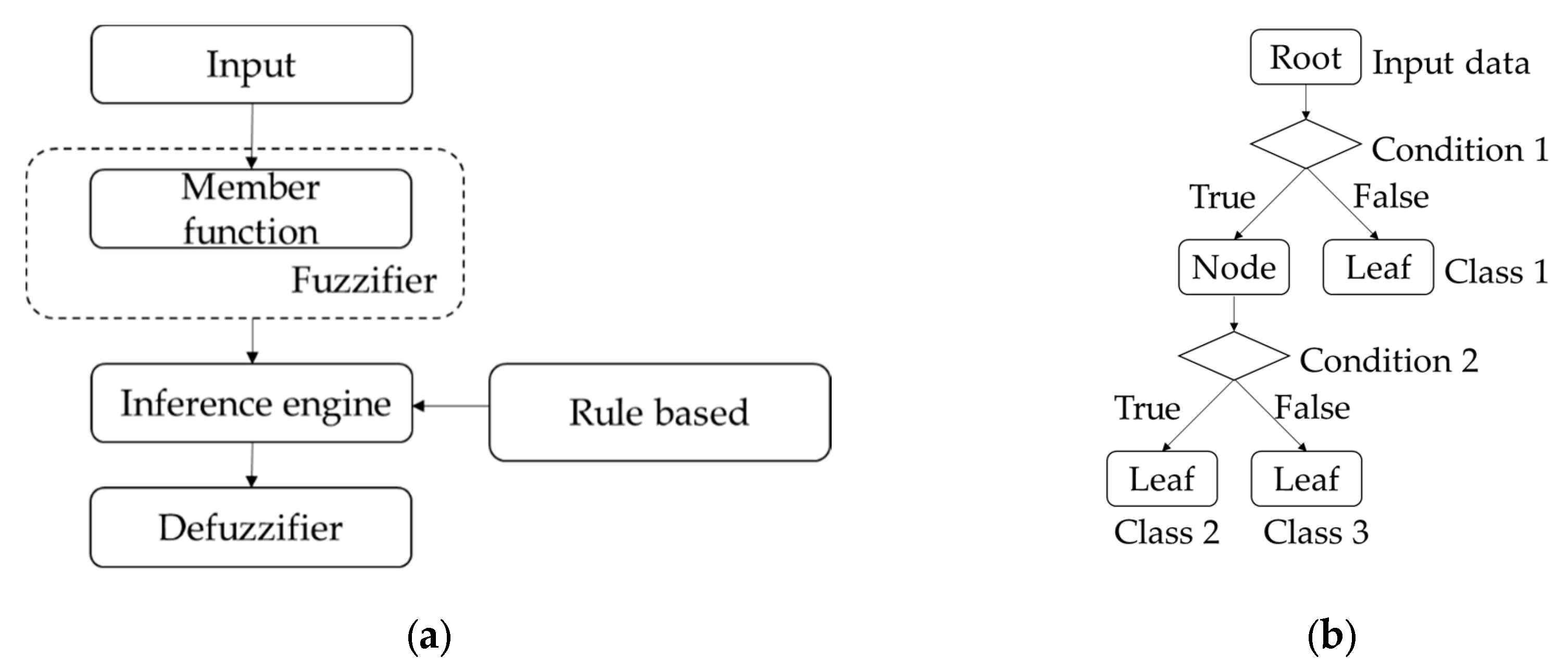
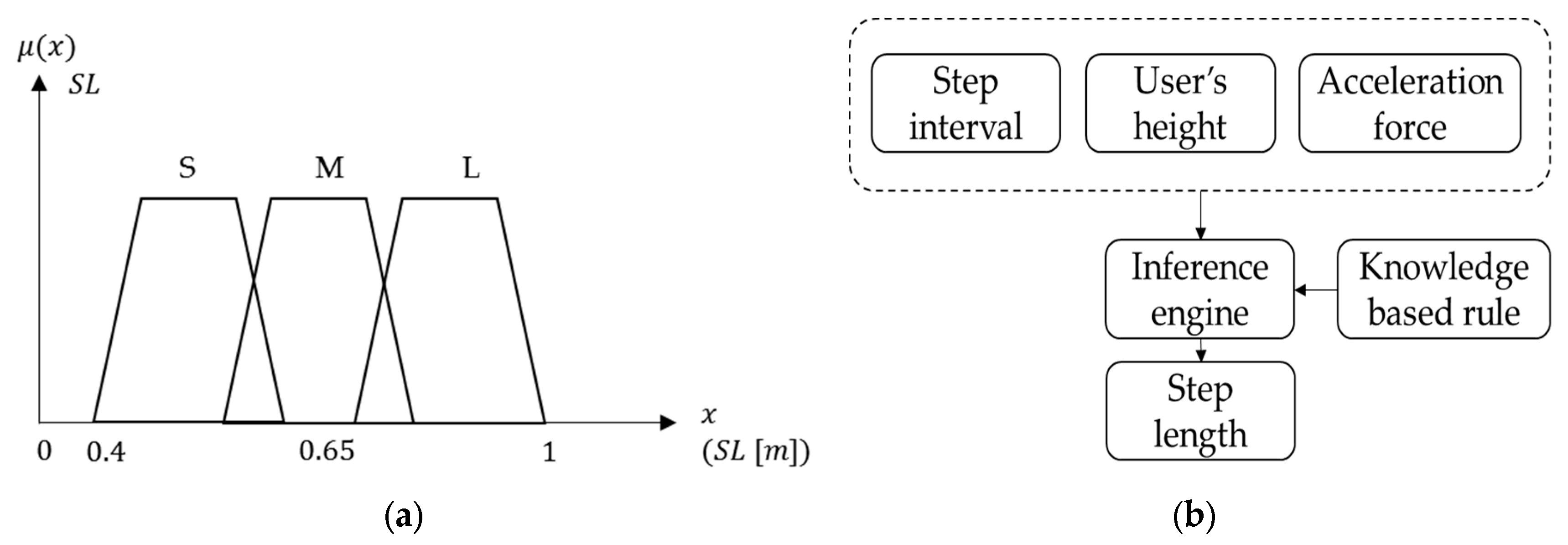
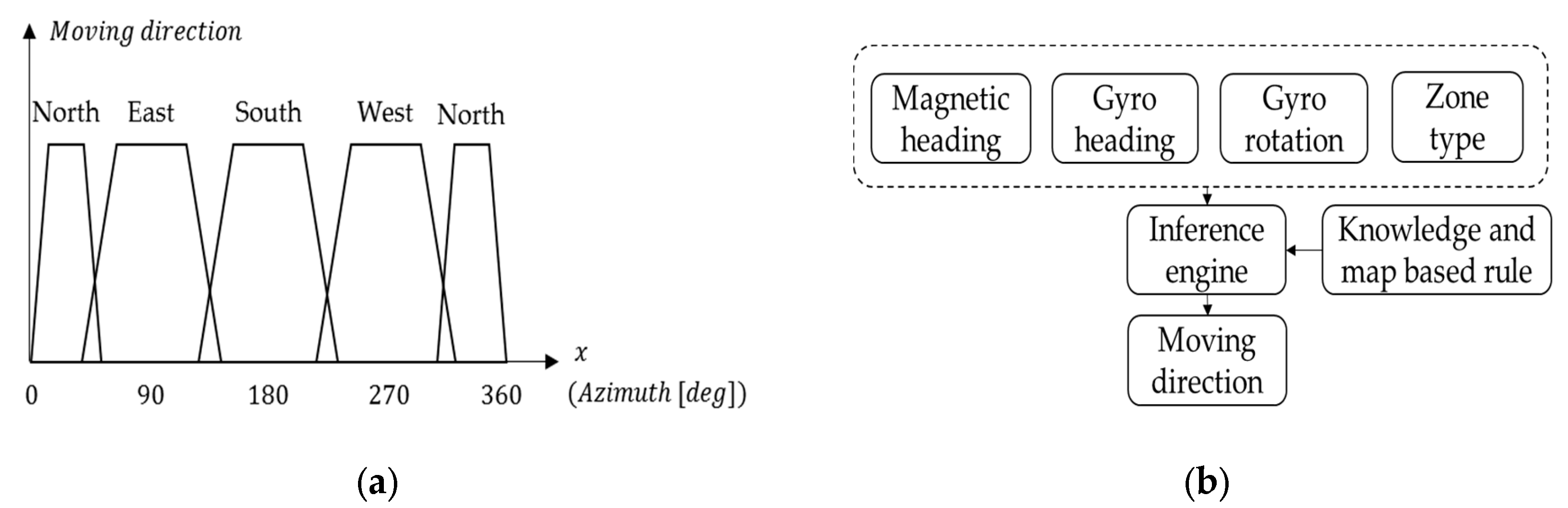
a priori qualitative, uncertain and expert knowledge. Specifically, fuzzy logic expresses the input crisp system in a fuzzy set with a membership function in the fuzzifier; then, using an inference engine, it obtains the output of a corresponding fuzzy set using defined, knowledge-based rules. Finally, the defuzzifier transforms the corresponding fuzzy set into crisp values. The basic concept of the fuzzy system is illustrated in
Figure 1a.
The application of fuzzy logic has dramatically increased in the last two decades, being used extensively in control theory, artificial intelligence, finance and other decision-making problems. Trawinski applied fuzzy logic based on FURIA-based and J48G-based multi-classification systems (MCSs) to improve the accuracy of a topology-based Wi-Fi signal strength fingerprint approach, where FURIA represents Fuzzy Unordered Rule Induction Algorithm and J48G is a simple decision tree [
9]. Lai
et al. estimated walking frequency and strength per step based on fuzzy logic for step length estimation in their PDR system [
10]. Shahram
et al. further propose a complete fuzzy logic architecture for step length estimation with the membership functions such as step interval, human locomotion, user’s height and trajectory curvature for the knowledge-based system (KBS) [
11]. In looking at the literature, it becomes clear that fuzzy logic is used frequently for step length estimation and fingerprinting for pedestrian indoor navigation.
There are studies regarding fuzzy logic map matching for vehicle navigation. Haibin
et al. propose an integrated map-matching algorithm based on fuzzy logic which combines a geometry map, probability map and the topology relation of the road network. Their fuzzy sets include three membership functions: projection distance, direction angle and comparability of trajectory [
12]. Zhang and Gao have developed a fuzzy logic-based GPS system and map-matching integrated algorithm with fuzzy sets consisting of vehicle speed, heading error, perpendicular distance, gyro-rate and Horizontal Dilution of Precision (HDOP) for initial identification and tracking of the road link [
13]. Working on similar problems, Wu has proposed a fuzzy sorting map-matching algorithm which generates road section candidates using a grid index, after which he uses a relativity function and fuzzy sorting method to determine the matching road section [
14]. Ren and Karimi have even published a fuzzy logic map-matching algorithm for wheelchair navigation. They use fuzzy sets consisting of the perpendicular distance from a GPS point to a sidewalk and angular difference between the movement trajectories to build the necessary knowledge-based rules to produce the appropriate calculations [
15]. Syed and Cannon have proposed a fuzzy logic map-matching algorithm with a high-sensitivity GPS receiver and a low-cost gyro for vehicle navigation in urban canyons. They designed two fuzzy inference systems which employ a variety of complete fuzzy sets to fix position and tracking [
16]. Essentially, the strengths of fuzzy logic are its reduction of the depth and complexity of computations, improvement of accuracy and simplification of the positioning algorithm through the use of a relatively simple heuristic which determines a combination of the most appropriate rules, because an advanced indoor navigation system attempting to determine the necessary information through pure number crunching, with the required high computational complexity, would likely cause complete battery drain within a few hours. Keeping these problems in mind, this study focuses on developing a set of fuzzy rules based on the smartphone sensors and map knowledge for allowing individuals to successfully navigate an indoor environment in real time.
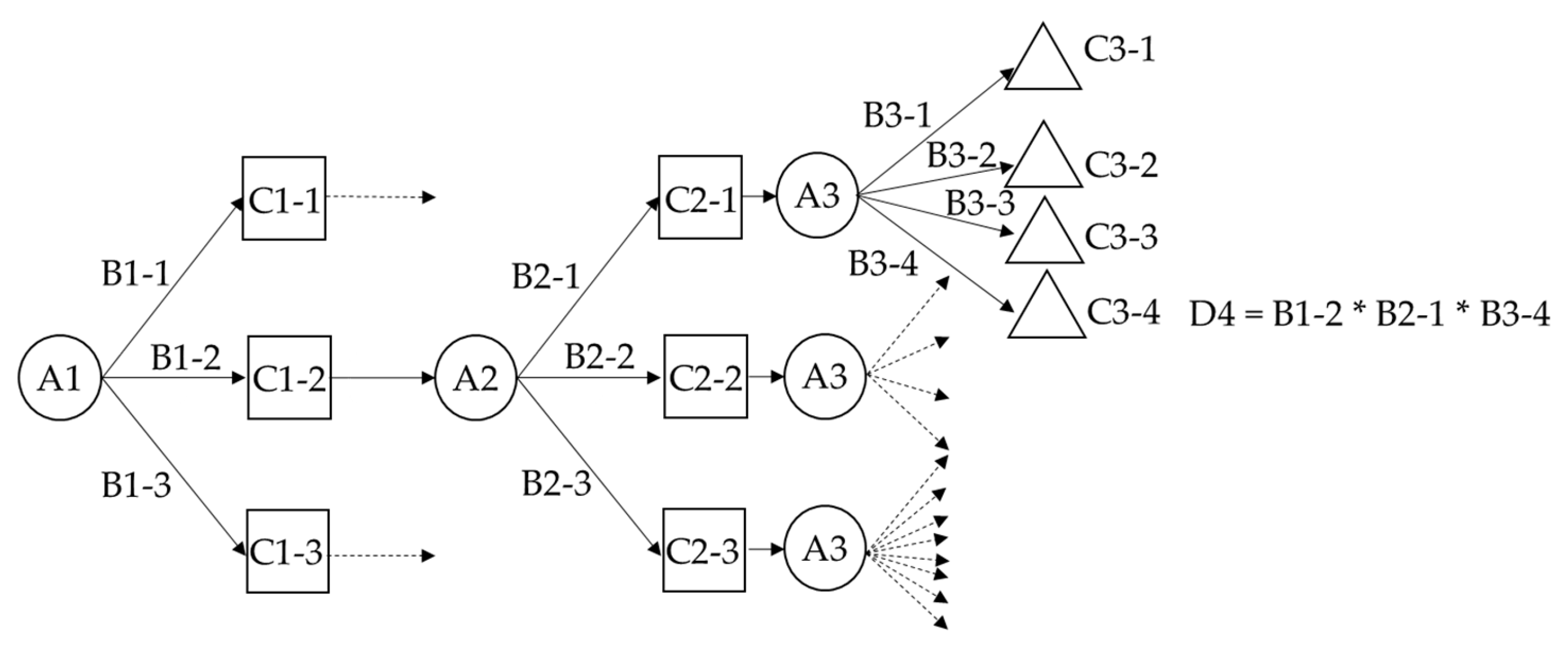
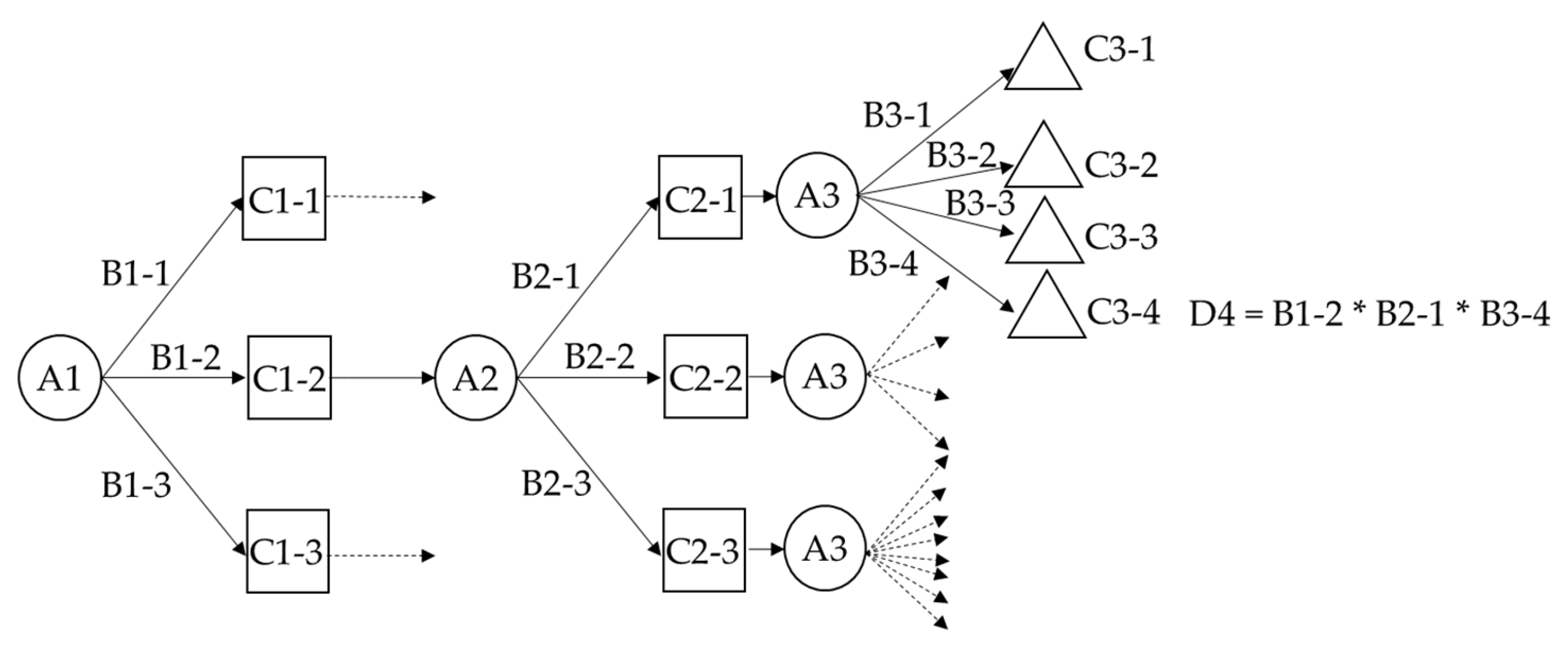
A decision tree is another low-complexity logic system for decision making; it consists of a hierarchical structure with a root, node and leaf, as shown in
Figure 1b. Each internal node binary splits the dataset through the branches based upon the known conditions and features of the system; the classification will continue until a decision is produced at a leaf. The necessary conditions, or rules, can be obtained through a training process using sample datasets, and once generated, the new rules can be further used to make predictive estimations or system decisions. A decision tree based on Wi-Fi fingerprinting built during the off-line phase and used to determine a model for on-line application can be found in [
17]. In addition, David
et al. proposed methods based on the comparisons of RSSI and orientation information (magnetometer) to develop multiple weighted decision trees and data mining techniques for Wi-Fi fingerprinting [
18]. There are also a variety of methods which use decision trees to aid in navigation, such as human behavior recognition [
19] and Zero Velocity Update (ZUPT) detection. However, decision trees cannot solve problems of cognitive uncertainty or reduce classification ambiguity because of the need for exactly classified rules.
Figure 1.
Two structures of decision making algorithms: (a) The fuzzy system includes fuzzifier, inference engine, expert rule and defuzzifer; (b) The binary decision tree includes the root, node and leaf.
Figure 1.
Two structures of decision making algorithms: (a) The fuzzy system includes fuzzifier, inference engine, expert rule and defuzzifer; (b) The binary decision tree includes the root, node and leaf.
Therefore, some studies combine fuzzy logic and decision tree to improve the performance of a rule-based system. Umano
et al. have proposed an understandable fuzzy decision tree (FDT) based on the Iterative Dichotmiser 3 (ID3) algorithm and defined fuzzy sets for the analysis of gas in oil [
20]. In trying to overcome the obstacles of decision tree caused by binary splits for classification, Yufei and Michael introduced an FDT which is based on the reduction of classification ambiguity through the use of fuzzy evidence for classified application; they use linguistic terms with soft boundaries to accommodate vagueness and ambiguity in human thinking and perception [
21]. Instead of having one class (leaf) from binary logic, the major difference between FDT and traditional decision trees (binary logic) is that the results may be members of more than one class after nodes/branches are calculated with fuzzy logic. Some mathematically oriented fuzzy decision trees are introduced in [
22,
23]. Inspired by the discovery of these various applications in the literature, we have taken the step of constructing a map-aided FDT for PDR to estimate the location of a pedestrian through the use of hierarchical rules and probability-based fuzzy sets.
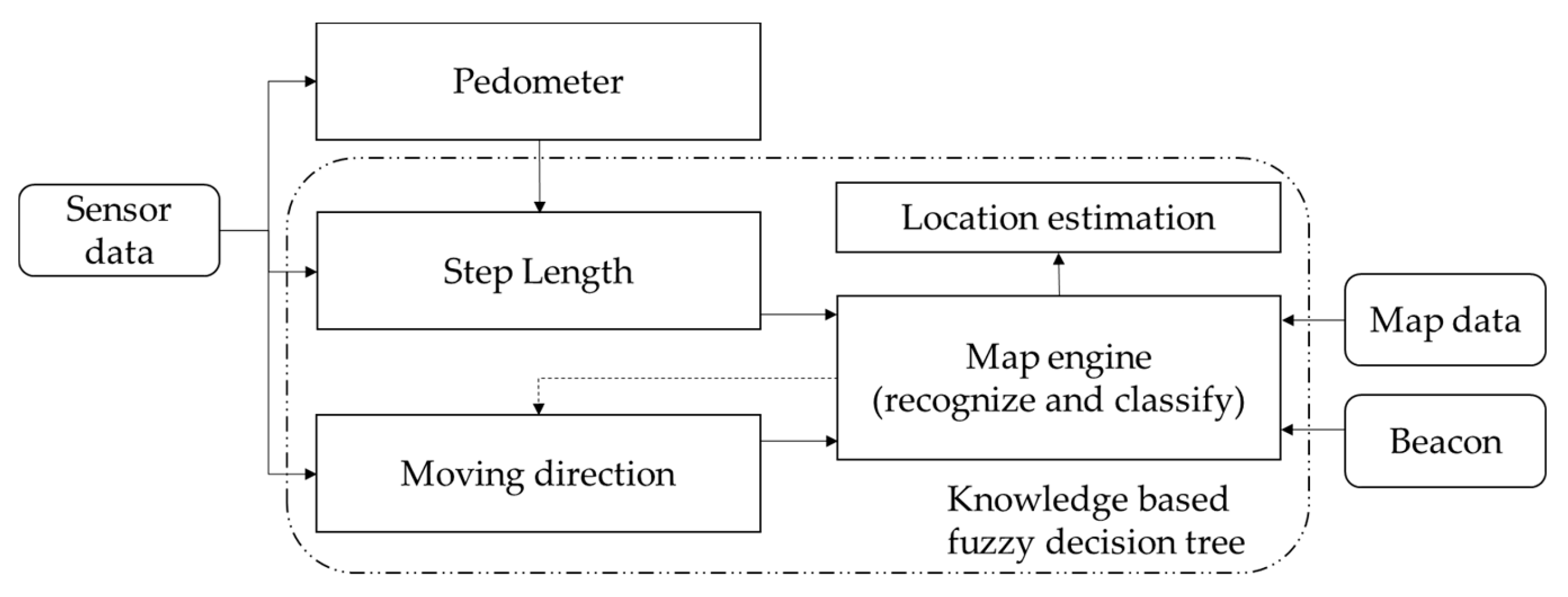
Although complicated algorithms, various integrations, mathematics and multi-sensor fusion do indeed significantly improve navigation accuracy, these high-complexity approaches are more time/power consuming and require higher hardware standards. In addition, external complementary signals suffer problems, such as environmental changes and maintenance costs. Other simpler algorithms usually need the adjustment of parameters based upon post/pre-processing to adapt to each user, device and environment which is inconvenient for real-time application. Therefore, developing a stable, accurate and low-complexity system is a much more attractive direction for smartphone and real-time indoor pedestrian applications. Based on this idea, a system using map-aided FDT is proposed. The system determines the user’s location based on low-complexity rules, sensor data, fewer distributed Bluetooth beacons (depending on the floor plan’s geometry). The FDT rules are trained once using experimental field data. Then these rules are fixed in the map-aided FDT system for all other new experimental field tests. In other words, after the map survey by IMMS and one experimental file is used as trained data, the proposed system has the generalization ability to work on various individuals and smartphones. The difference between the proposed system and the contrast PDR system is the additional logic rules related to the map information.
There are three main advantages to this approach: (1) based on a single time training, the proposed system is versatile regarding different users, smartphones and experimental fields. In other words, the proposed system has the ability to work for new devices and individuals; in a crowd or a new environment such as a plaza (where it is hard to apply general map matching); and in corridors and a magnetic-hostile environment; (2) the system can achieve better stability without time-consuming pre/post-processing; (3) compared to traditional PDR, a low-complexity method, the proposed method is also a relatively simple while maintaining a similar level of error acceptibility without the need for continuous tuning. It is worth mentioning that for traditional PDR to achieve asimilar performance, anew tuning process is required for each users, sensor and environment.
3. Results and Discussion
The experimental results are presented in the following paragraphs. The developed Android software with proposed FDT algorithm was implemented to process the data in real time.
Figure 12,
Figure 13 and
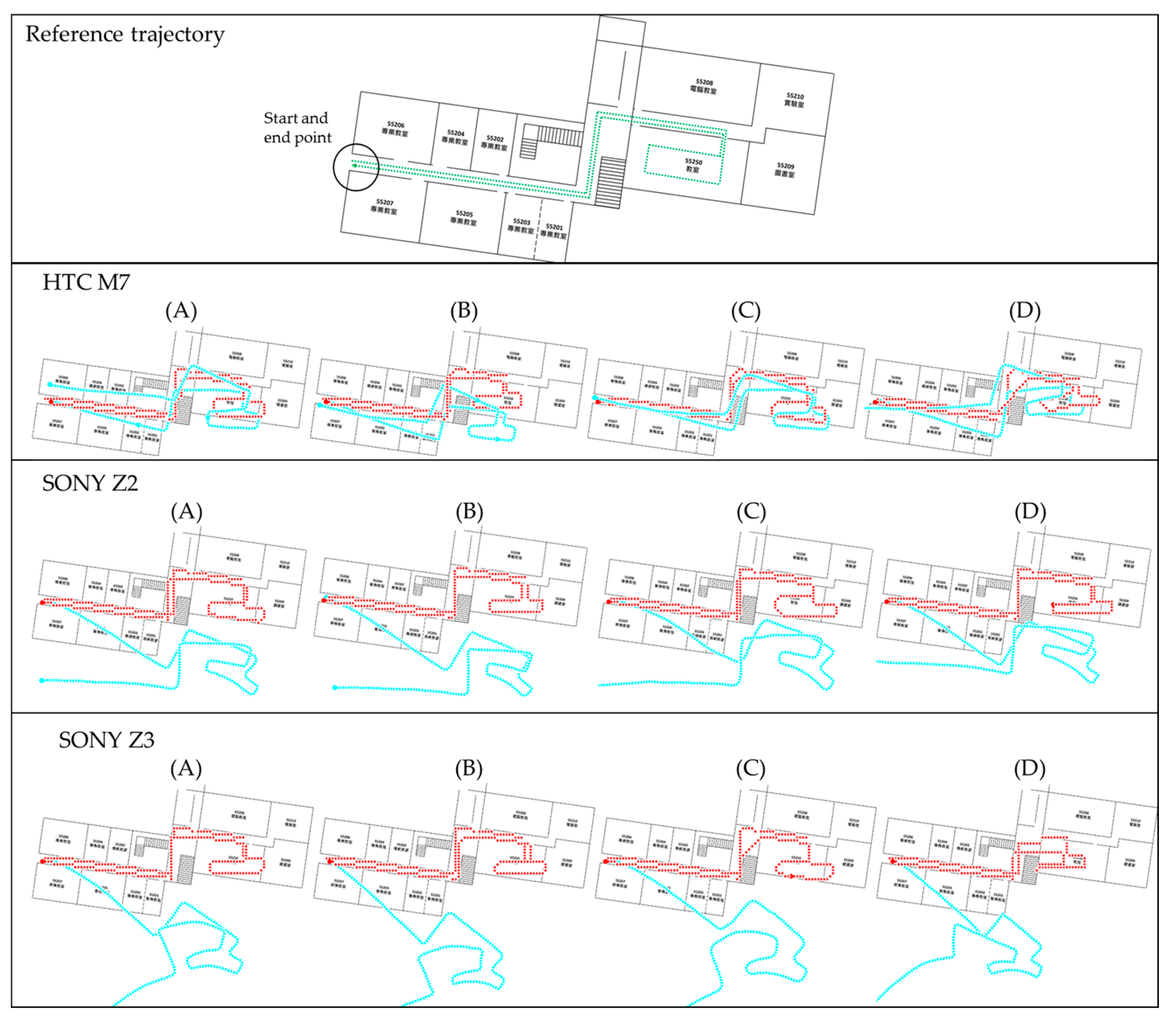
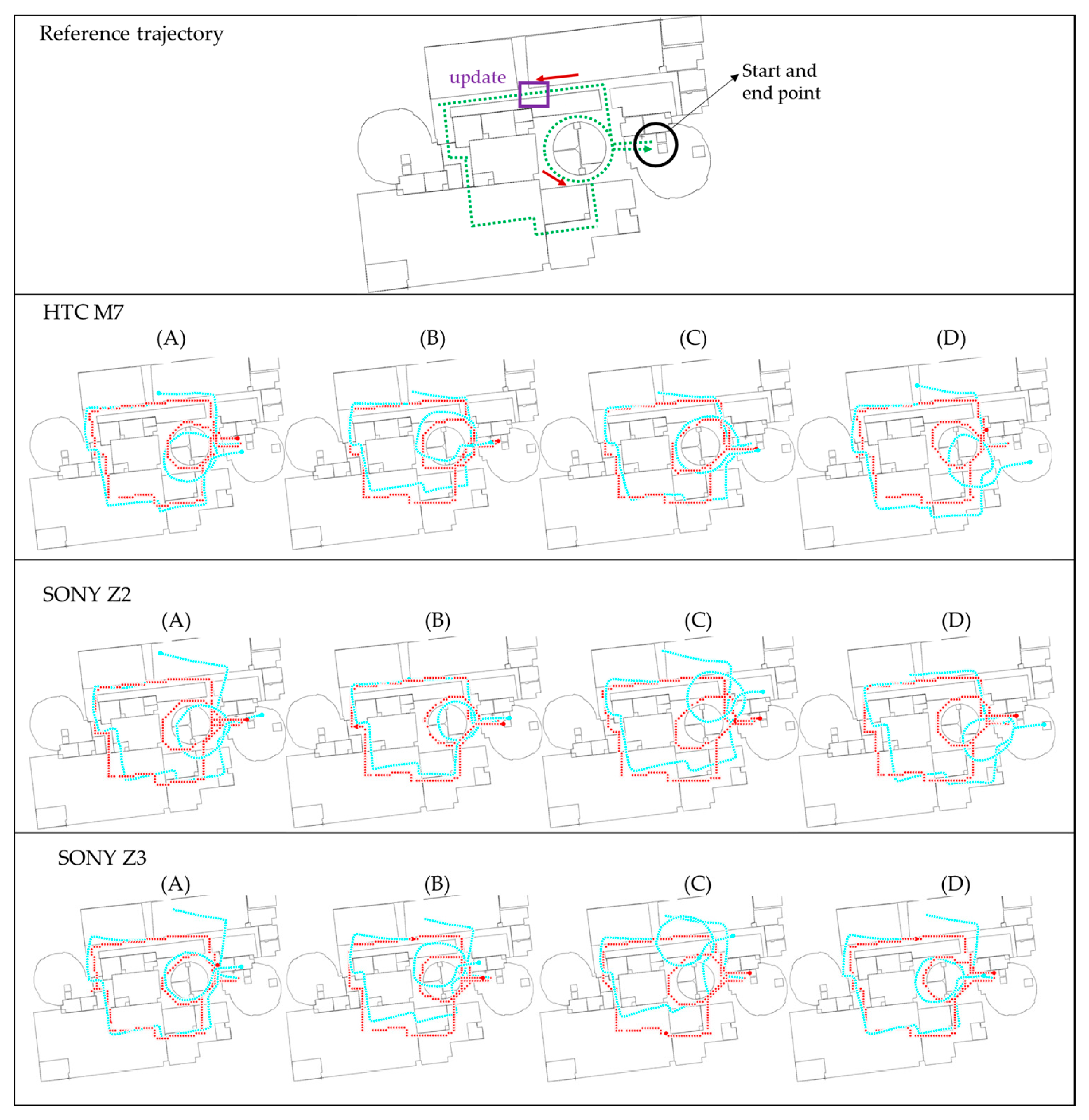
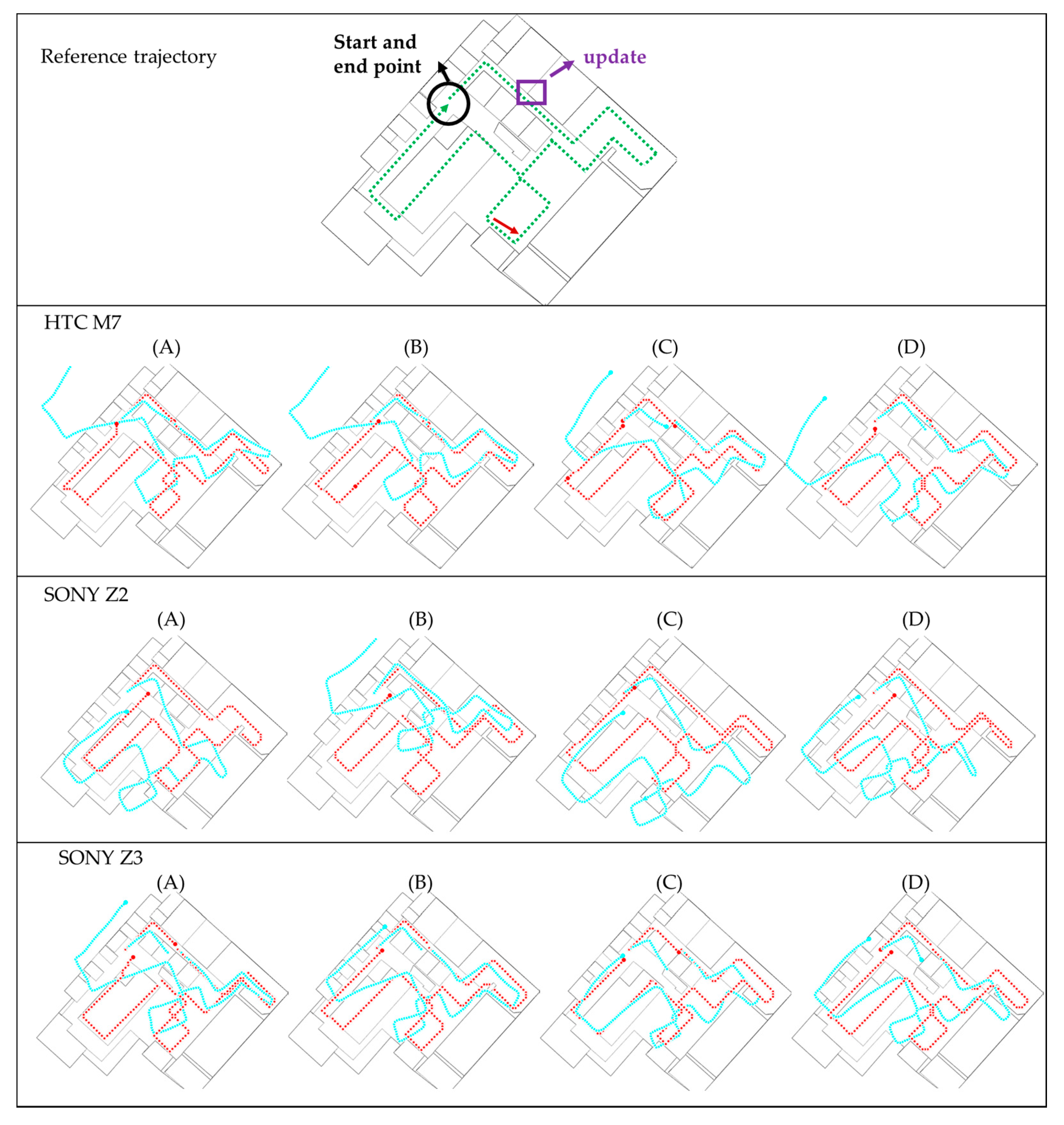
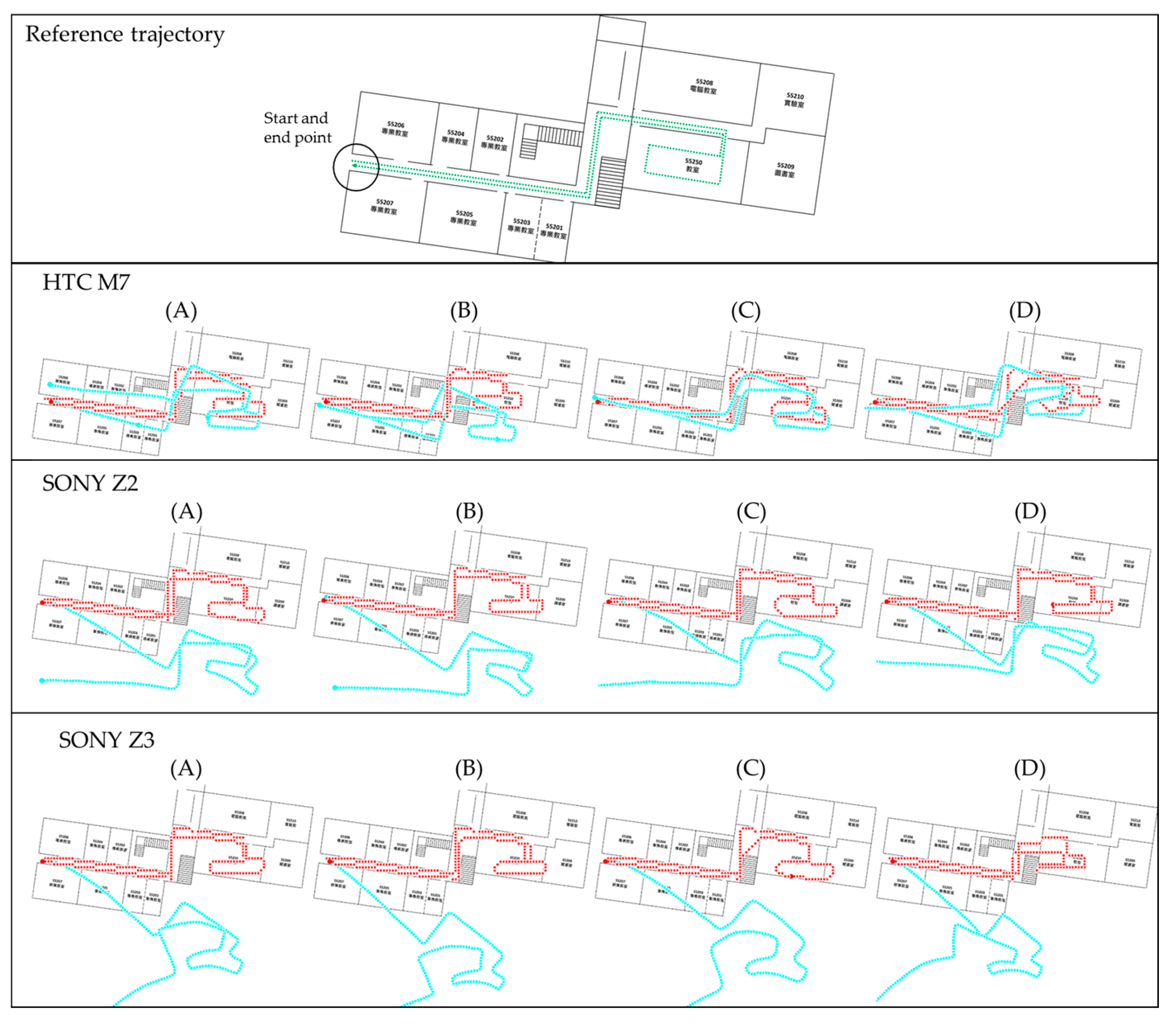
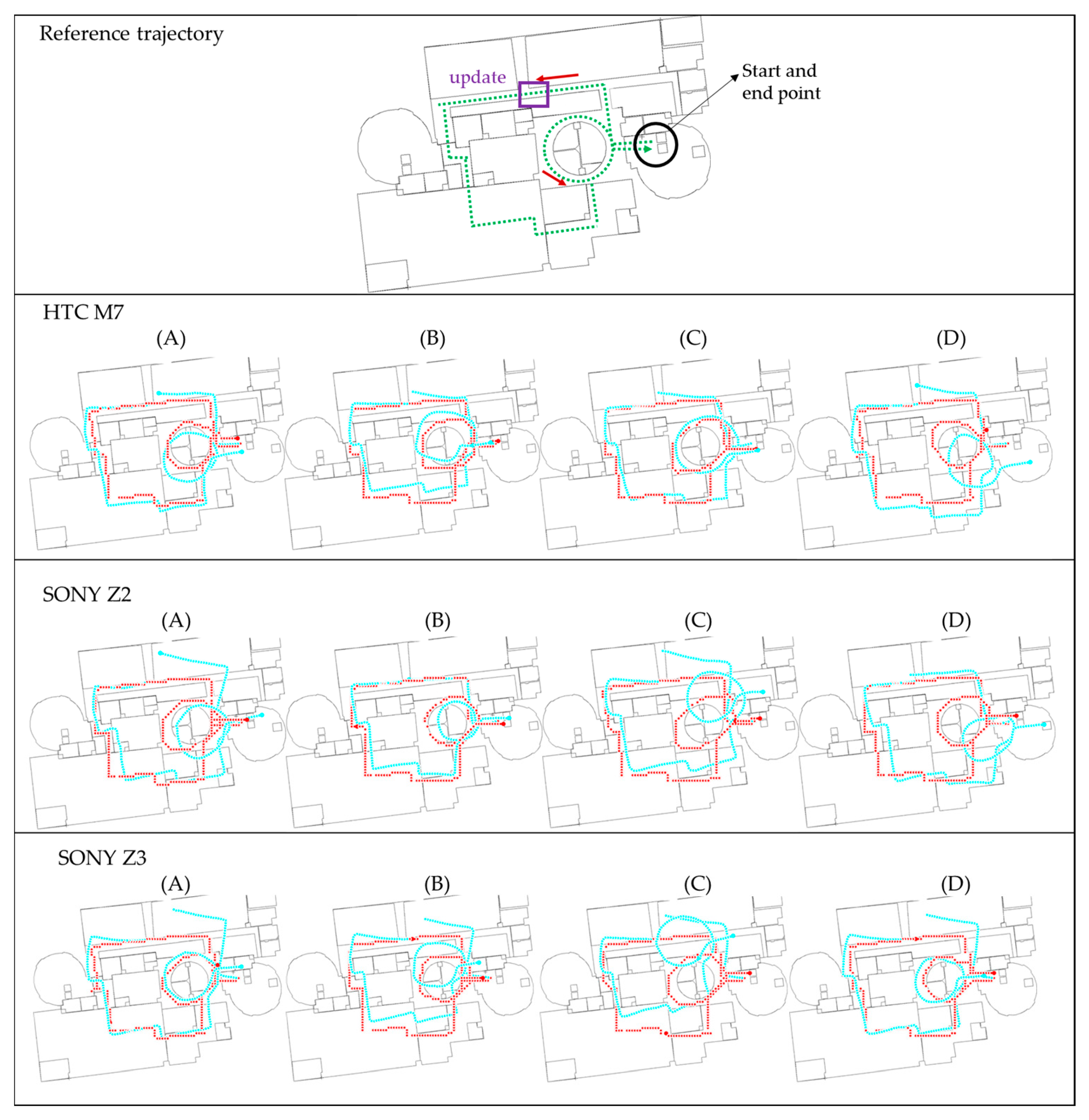
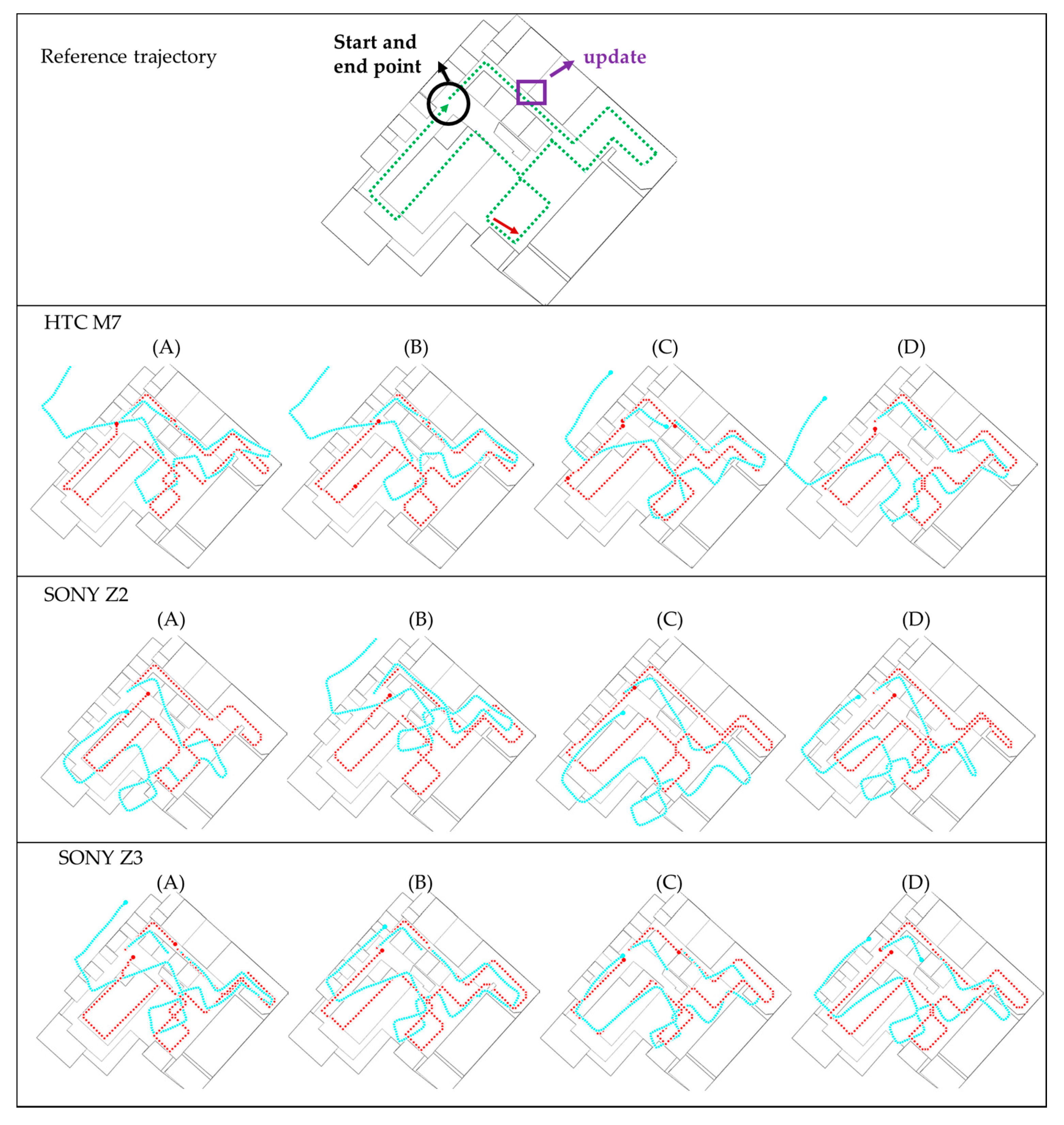
Figure 14 show the trajectories at NCKU, III and the enterprise, respectively. The green lines shown in the figures in the first row represent the real experimental route. This route is also a survey by the IMMS (using navigation grade IMU) which is estimated by the EKF and RTS-smoother with NHC and frequent ZUPT constraint. Because these two systems were not implemented together (time synchronization), no further position difference is shown. The red lines shown in the figures represent the proposed FDT algorithm, and the light-blue lines represent the contrast PDR system. The black circles indicate the starting and ending points. The purple rectangles indicate the locations where beacons were used to trigger the update operation. Symbols A, B, C and D represent the four different people in the experiments. In all figures, the second row shows the results of HTC M7, the third row shows SONY Z2 and the fourth row shows SONY Z3.
Figure 12 shows the experimental trajectories at NCKU department building. The result in the third of the second row is user
C using the HTC M7, which is the sample data for tuning parameters and establishing knowledge rules used in the contrast PDR and proposed FDT systems, respectively. In other words, all the parameters or rules for both systems are only tuned once with HTC M7 and user C at NCKU field, and there is no further training or tuning for other smartphones, users and fields. Therefore, the other tests are designed to verify the stability and adaptability for real-time application.
Figure 12.
The experimental trajectories at NCKU department building.
Figure 12.
The experimental trajectories at NCKU department building.
Figure 13.
The experimental trajectories at III office floor.
Figure 13.
The experimental trajectories at III office floor.
The contrast PDR system as well as the FDT system performs well in the sample data because of the well-tuned parameters of step length model and KF in post-processing. Due to no update operation triggered during the navigation phrase, the contrast PDR system has no ability to correct the heading. Therefore, the contrast PDR performs worse in other cases at NCKU fields. Even if we correct the initial heading, the drift continues and clearly deteriorates the trajectory. It indicates that the parameters of contrast PDR in step length model and KF are not suitable to the different users and smartphones in a magnetic-hostile environment. Thus, the contrast PDR needs new calibration of the step length for different users and a new KF tuning process for different smartphones and magnetic fields in post-processing. Unfortunately, these procedures are time consuming and not suitable for real-time indoor navigation. In contrast, the proposed map-aided FDT system performs stably in real time at all the cases without further tuning requirement.
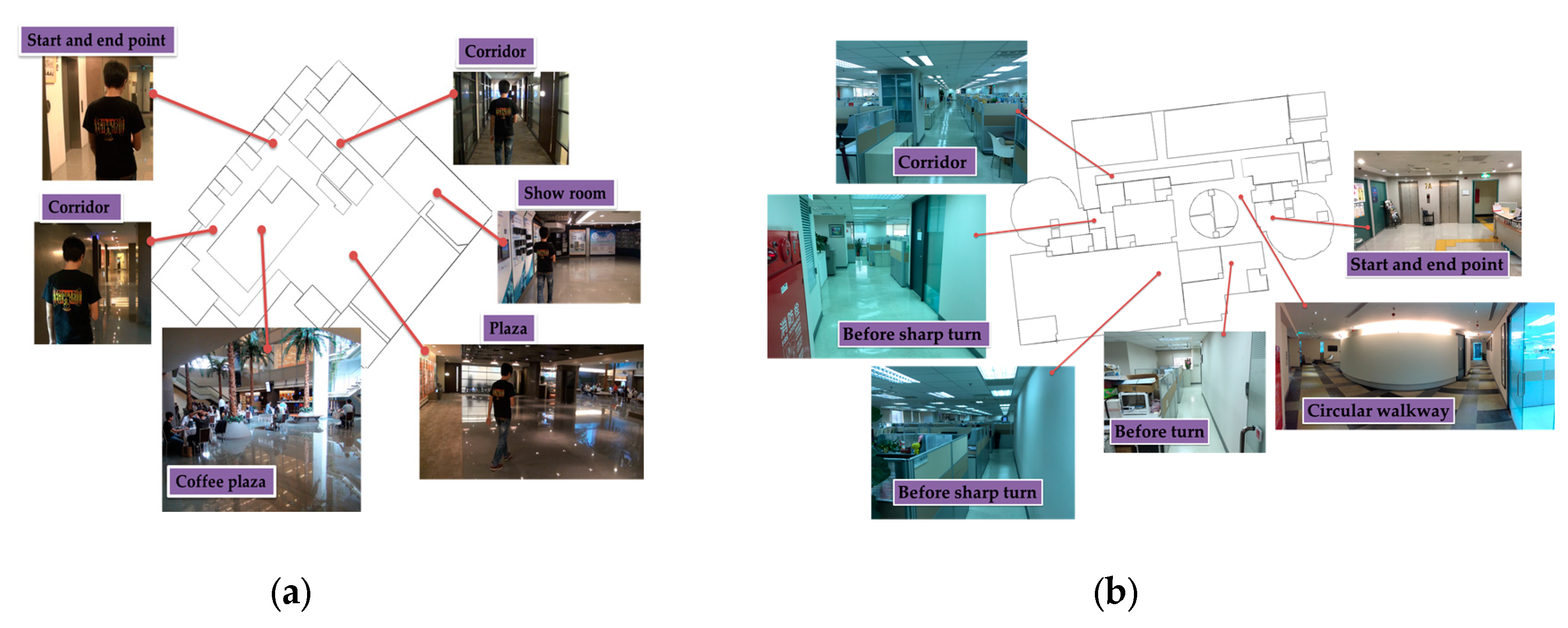
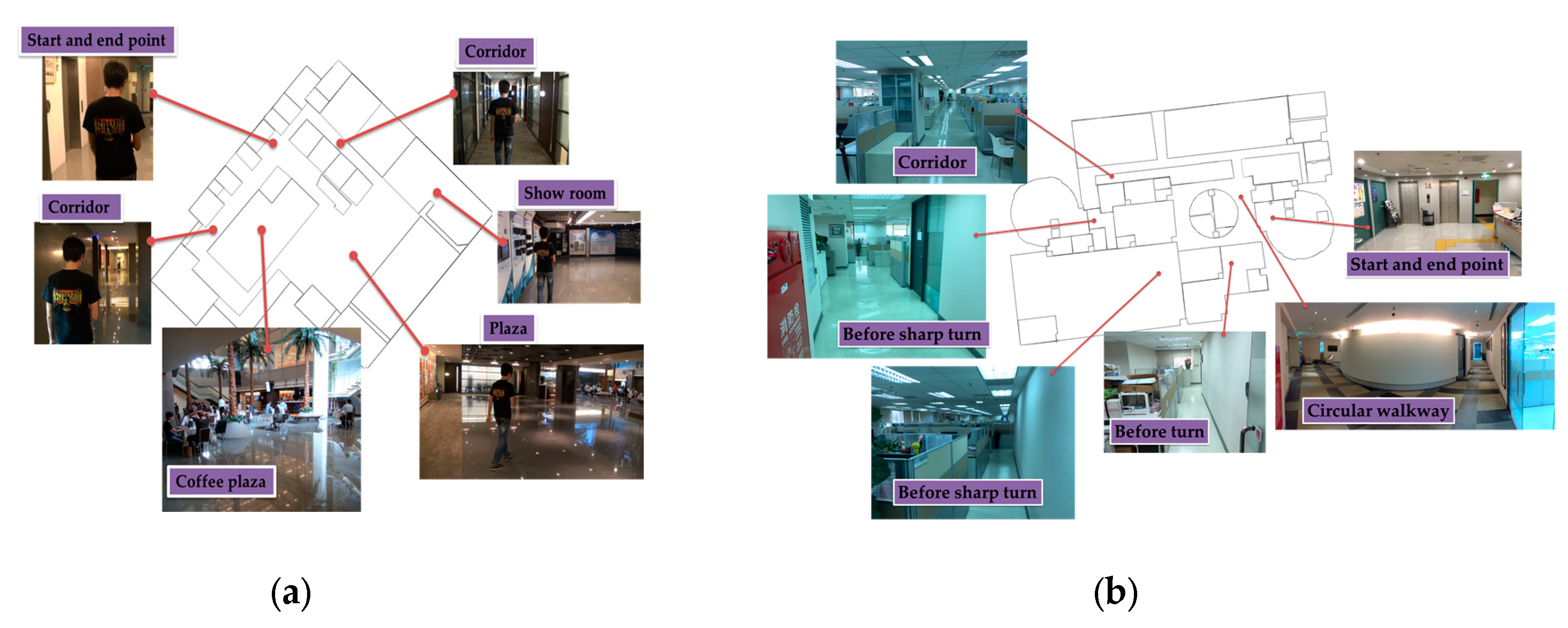
Figure 13 shows the experimental trajectories at III building which is an office with a lot of computers. In contrast to the previous NCKU field, there is a beacon (markedby a purple rectangle) to trigger the position and heading update near the beginning of the routes. Because of this beacon, the contrast PDR performs well at the beginning of all the cases, but still deteriorates over time. This phenomenon confirms that the parameters need individual calibration for each factor. However, the proposed FDT system still performs stably with good accuracy at III field. It is worth mentioning that the traditional topological map matching based on the polyline and nodes is hard to apply to this circular walkway, because the user may walk in a rectangular or a circular shape which cannot be matched with a fix route. The proposed system using the matching of eight directions can mitigate this problem.
Figure 14 shows the experimental trajectories at the enterprise building which has plazas, engine room and a high ceiling. There is also a beacon installed near the beginning to trigger the position and heading update. The contrast PDR still drifts over time because of a magnetic-hostile environment and inaccurate step length. The proposed system uses the matching of eight directions at the plazas without the specific route which is required by the traditional map matching. In addition, the RF-based positioning usually does not work in the high-ceilinged space or in spaces with serious electromagnetic interference caused by a large number of electronic devices. However, the results show the proposed FDT system still performs stably with good quality.
Figure 14.
The experimental trajectories at the hall of enterprise.
Figure 14.
The experimental trajectories at the hall of enterprise.
Table 5 summarizes the accuracy of all the results. The accuracy index is the percentage of loop closure error and total distance. For example, the accuracy of 1% means every one hundred travelled there will have one meter error accumulated. As demonstrated in
Figure 12,
Figure 13 and
Figure 14, the proposed system has better performance than the contrast PDR system.
Table 3 shows that the loop closure errors of the proposed FDT algorithm for all the experimental results and mean value is 1.3%. It is more accurate than the mean error of 8.21% in the contrast PDR. The standard deviation of the loop closure errors of the map-aided FDT system is less than 1%, which means it has high stability for different users, smartphones and fields.
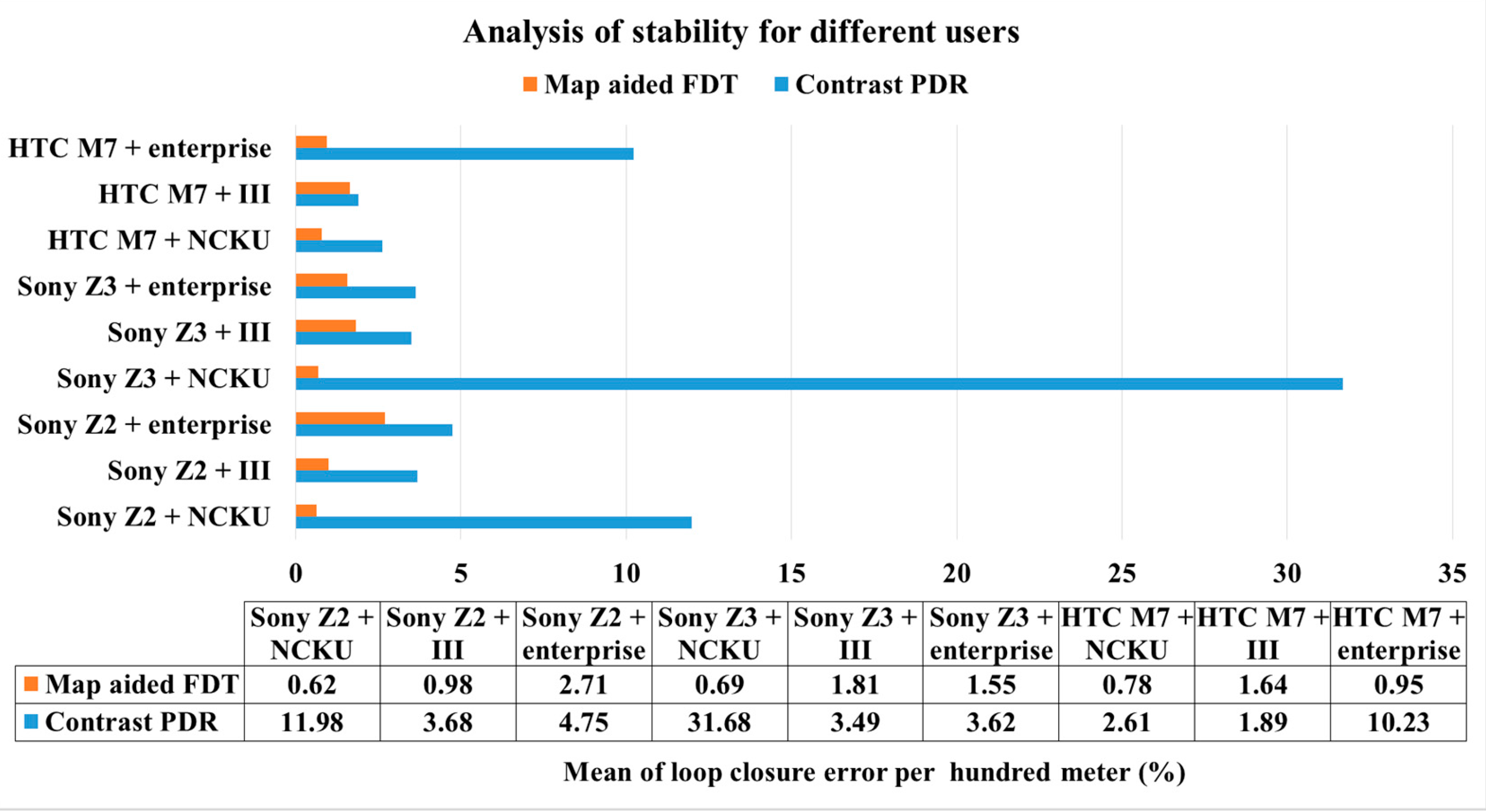
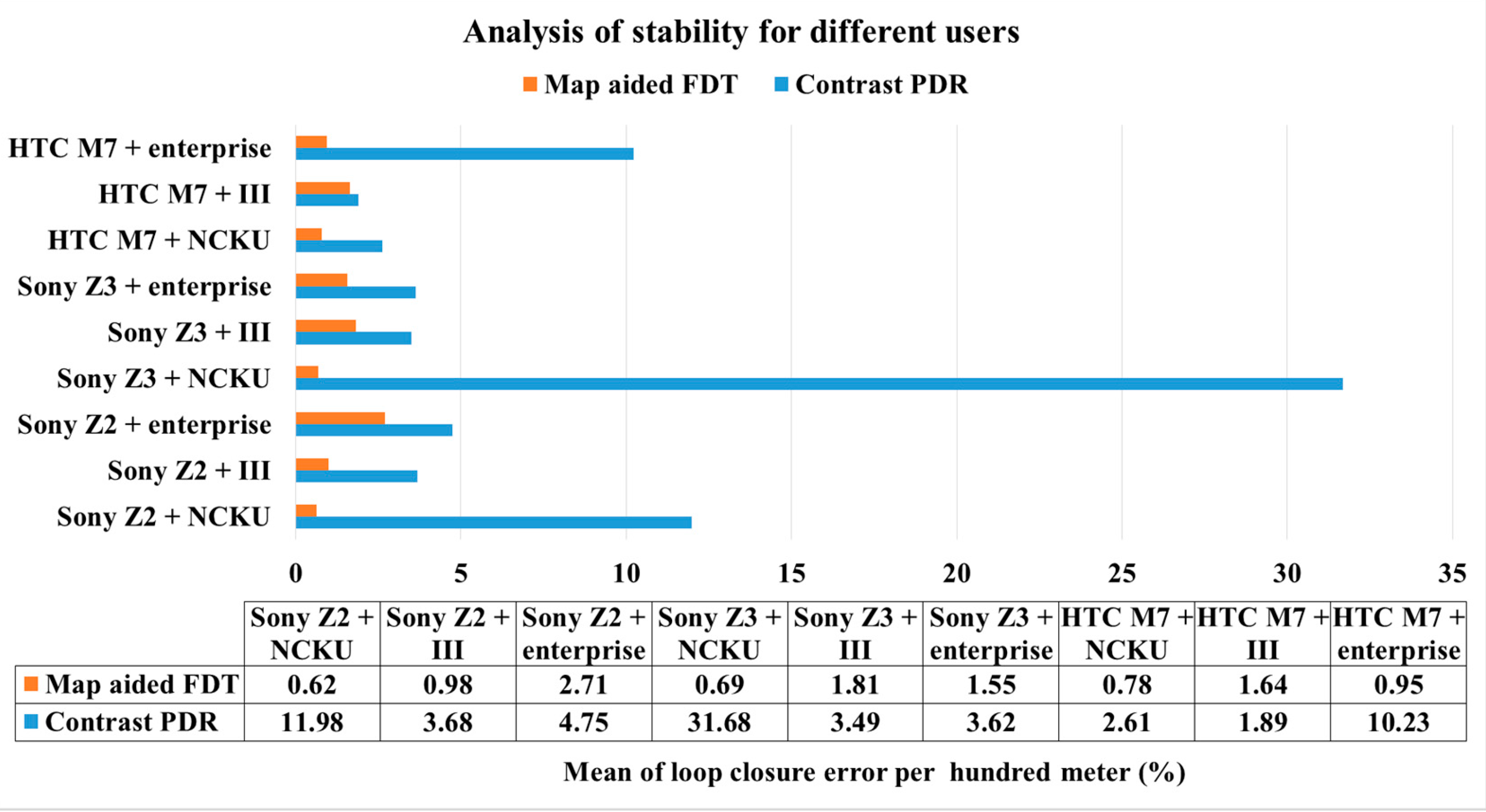
Figure 15 shows the mean values in terms of different users in the same field and using the same smartphone based upon
Table 5. In other words, this figure indicates the stability of different users in the same situation. For example, the mean error of 0.62% at the first column represents the mean error of FDT system calculated from all users that use Sony Z2 at the NCKU field. The performances of contrast PDR are worse at the NCKU field because there is no update beacon at the beginning for initial heading correction. However, using the HTC M7 is better in this field because the parameters have been tuned. The figure shows that the map-aided FDT system has better stability when the user is different, regardless of smartphone or field.
Table 5.
The accuracy of FDT and contrast PDR system.
Table 5.
The accuracy of FDT and contrast PDR system.
| Field | User | SONY Z2 | SONY Z3 | HTC M7 |
|---|
| | | PDR | FDT | PDR | FDT | PDR | FDT |
| NCKU | A | 12.07 | 0.61 | 29.96 | 0.66 | 2.43 | 1.09 |
| 143 m | B | 14.00 | 0.66 | 33.44 | 0.68 | 1.30 | 0.74 |
| | C | 12.45 | 0.60 | 32.90 | 0.64 | 0.91 | 0.64 |
| D | 9.40 | 0.61 | 30.42 | 0.77 | 5.79 | 0.66 |
| III | A | 3.19 | 0.89 | 1.84 | 3.86 | 1.28 | 0.93 |
| 162 m | B | 1.98 | 0.99 | 3.28 | 1.33 | 0.78 | 0.61 |
| | C | 4.48 | 0.86 | 7.12 | 1.19 | 1.14 | 1.16 |
| D | 5.07 | 1.17 | 1.71 | 0.87 | 4.36 | 3.87 |
| Enterprise | A | 3.47 | 3.39 | 6.99 | 1.66 | 13.03 | 0.54 |
| 175 m | B | 9.91 | 2.31 | 3.47 | 0.89 | 11.12 | 1.19 |
| | C | 3.02 | 1.75 | 1.48 | 1.94 | 7.98 | 0.82 |
| D | 2.59 | 3.38 | 2.53 | 1.71 | 8.79 | 1.25 |
| | Mean of FDT: 1.3, Standard deviation: 0.94 |
| : | Mean of contrast PDR: 8.21, Standard deviation: 9.26 |
| | Unit: loop closure error/travelling distance (%) |
Figure 15.
Analysis of stability for different users.
Figure 15.
Analysis of stability for different users.
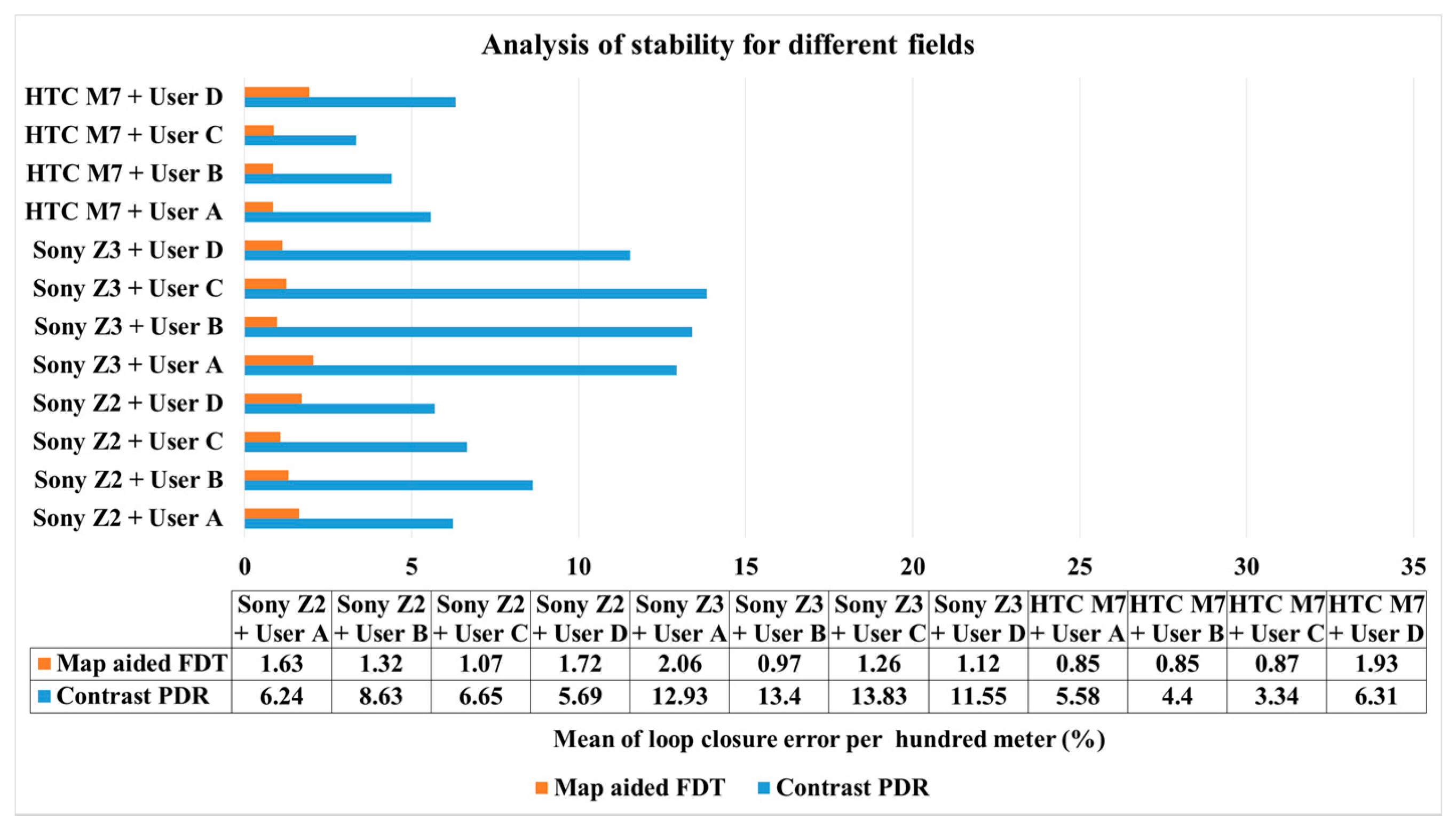
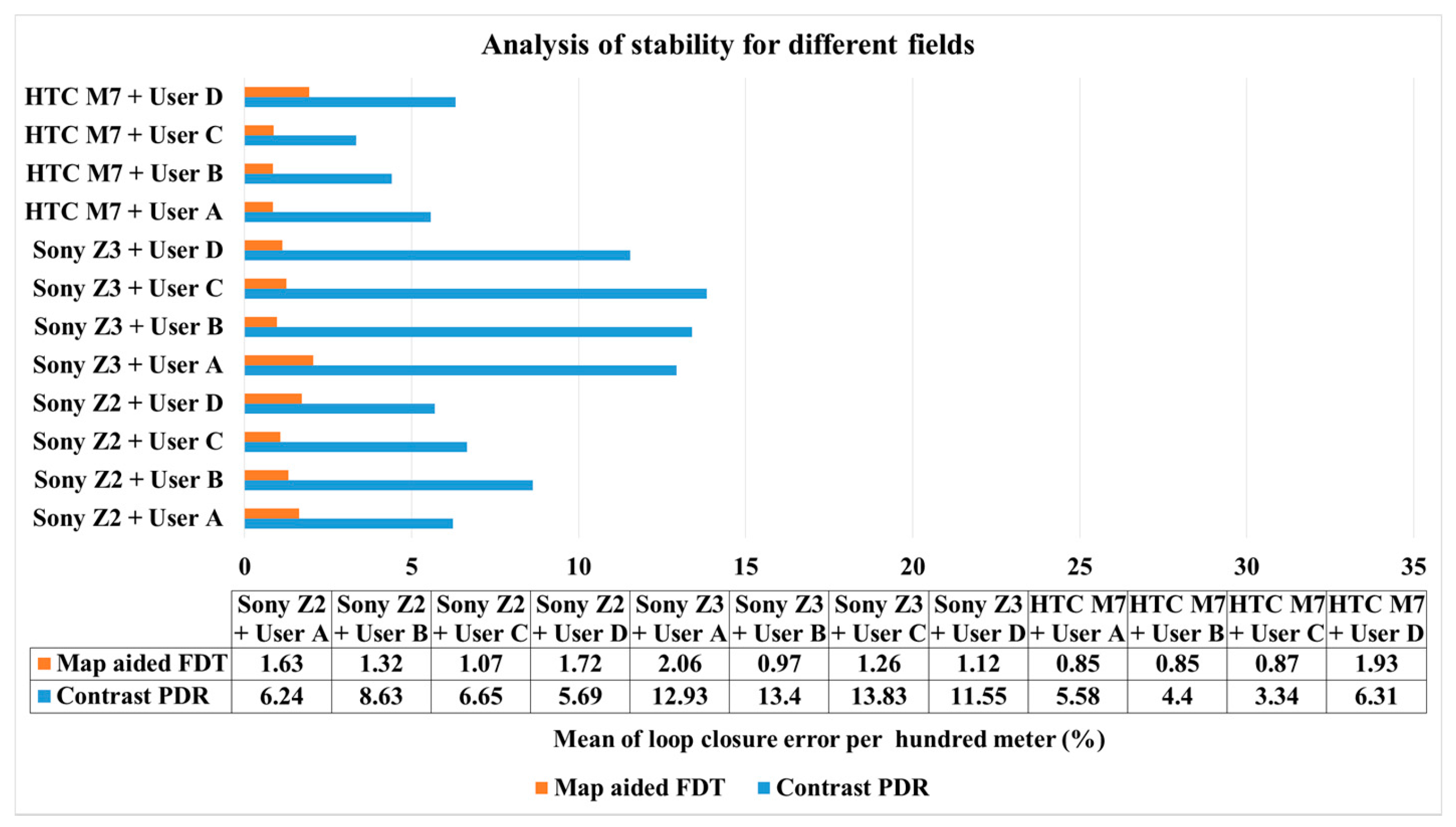
Figure 16 shows the mean values in terms of the same user using the same smartphone at different sites based on
Table 5, where it implies adaptability to the place. In other words, this figure indicates the stability of algorithms in different environments in the same situation. For example, the mean error of 1.63% at the first column represents the mean error of the FDT system calculated from the user
A using Sony Z2 in all fields. The figure shows that the map-aided FDT system has better stability when the field is different, regardless of user and smartphone. In addition, because the parameters of HTC M7 have been tuned with user C at NCKU, the group of HTC M7 performs better than other smartphones. It is obvious that the parameters of HTC M7 are not suitable for other smartphones which have different specifications and need individual tuning to reach optimum performance.
Figure 16.
Analysis of stability for different fields.
Figure 16.
Analysis of stability for different fields.
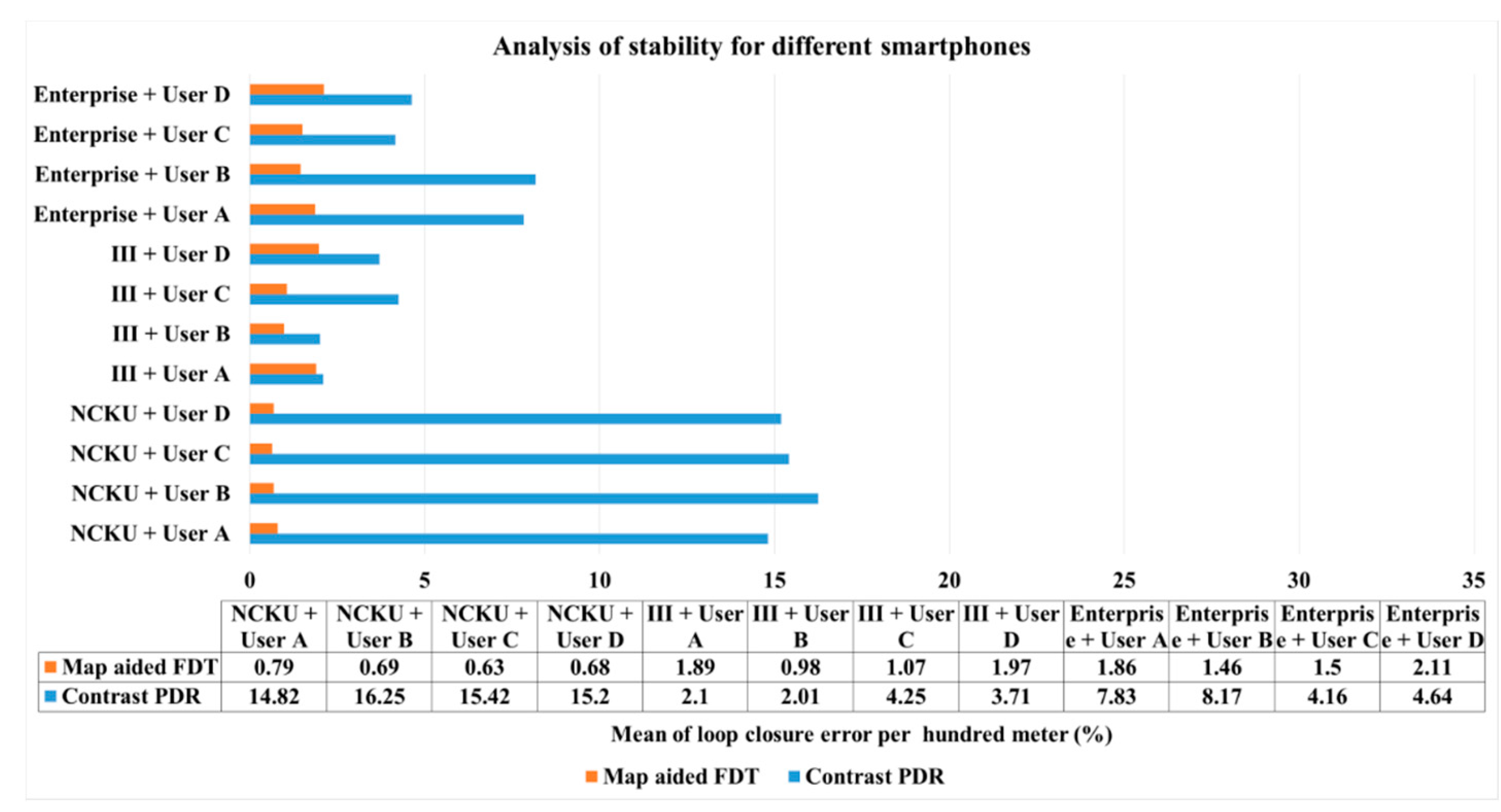
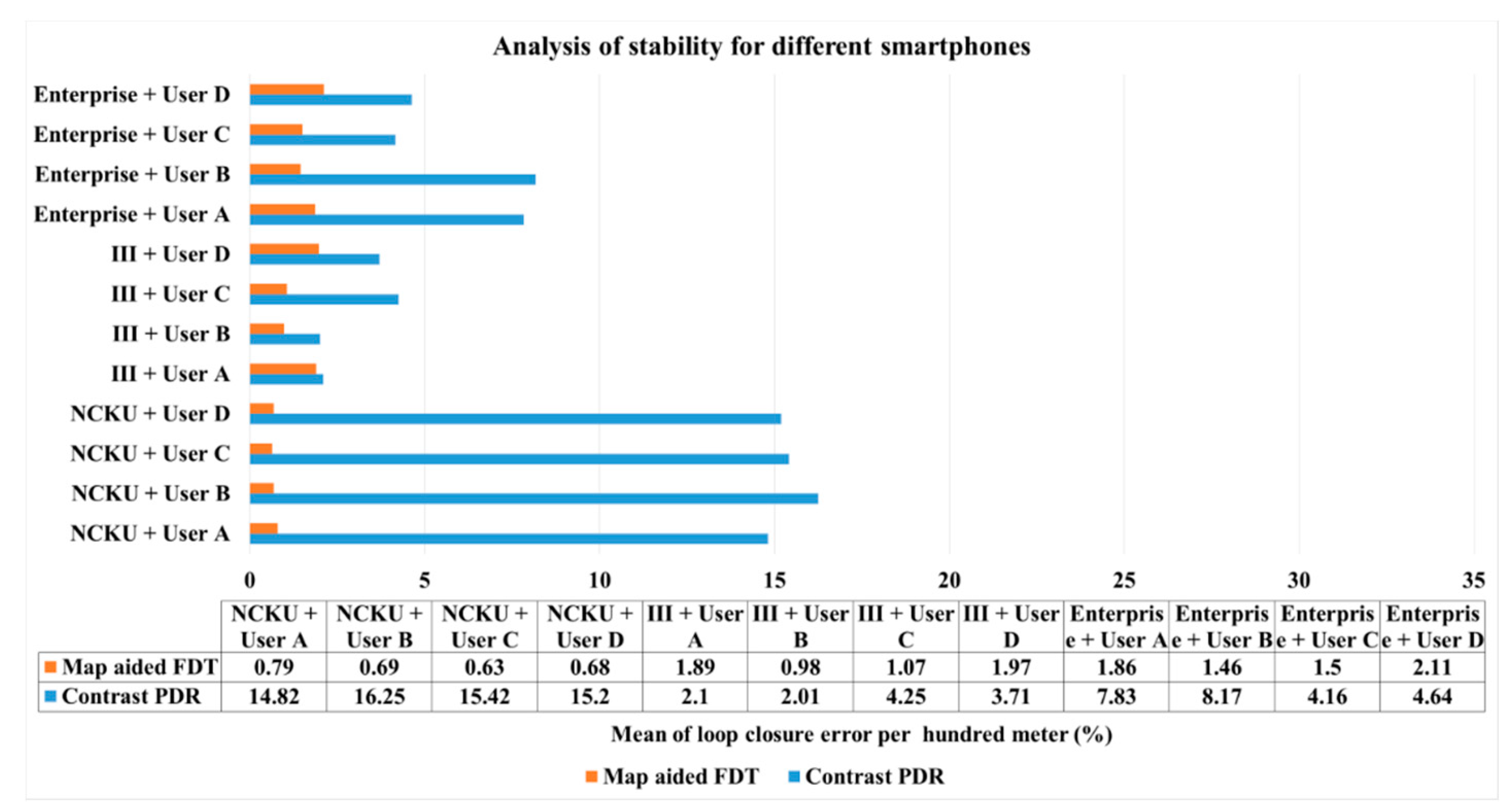
Figure 17 shows the analysis for each smartphone when used by the same user in the same field, where it gives some indication of the acceptance of algorithms by the different devices. For example, the mean error of 0.79% in the first column represents the mean error of the FDT system calculated from user
A using three kinds of smartphones at NCKU. The NCKU cases of contrast PDR are worse because there is no initial heading correction, but the NCKU cases of FDT are better than in other fields. The group of PDR values in III has better performance than the group of PDR values in enterprise, indicating that the different characteristics between two fields need an individual tuning process. This figure shows that the map-aided FDT system has better stability even when the specification of sensors is new to this system.
Figure 17.
Analysis of stability for different smartphones.
Figure 17.
Analysis of stability for different smartphones.
Ideally, the parameters and corresponding weights in KF of general PDR should be tuned for different fields and smartphones in order to compensate for the different levels of magnetic interference and differences within the sensor grade. This is because the accuracy of heading fusion depends on the accuracy of magnetometer and gyro as well as the parameters of the filter. The grade of accelerometers not only affects the pedometer but also indirectly influences the determination of step length. The model parameters of step length also depend on the characteristics of the user which needs calibration. According to these reasons, the contrast PDR system will perform poorly without individual pre-calibration and post-processing for each user, smartphone and field. However, the proposed FDT algorithm has better accuracy and stability in all cases without any further processing. It uses some simpler rules derived from one experiment and map information to mitigate the error from an inaccurate step length model and heading estimation. Therefore, the proposed map-aided FDT system provides stable average accuracy of about 1.3% based on 36 experiments in this study.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}