
ISAR Imaging of Maneuvering Targets Based on the Modified Discrete Polynomial-Phase Transform

Abstract
:1. Introduction
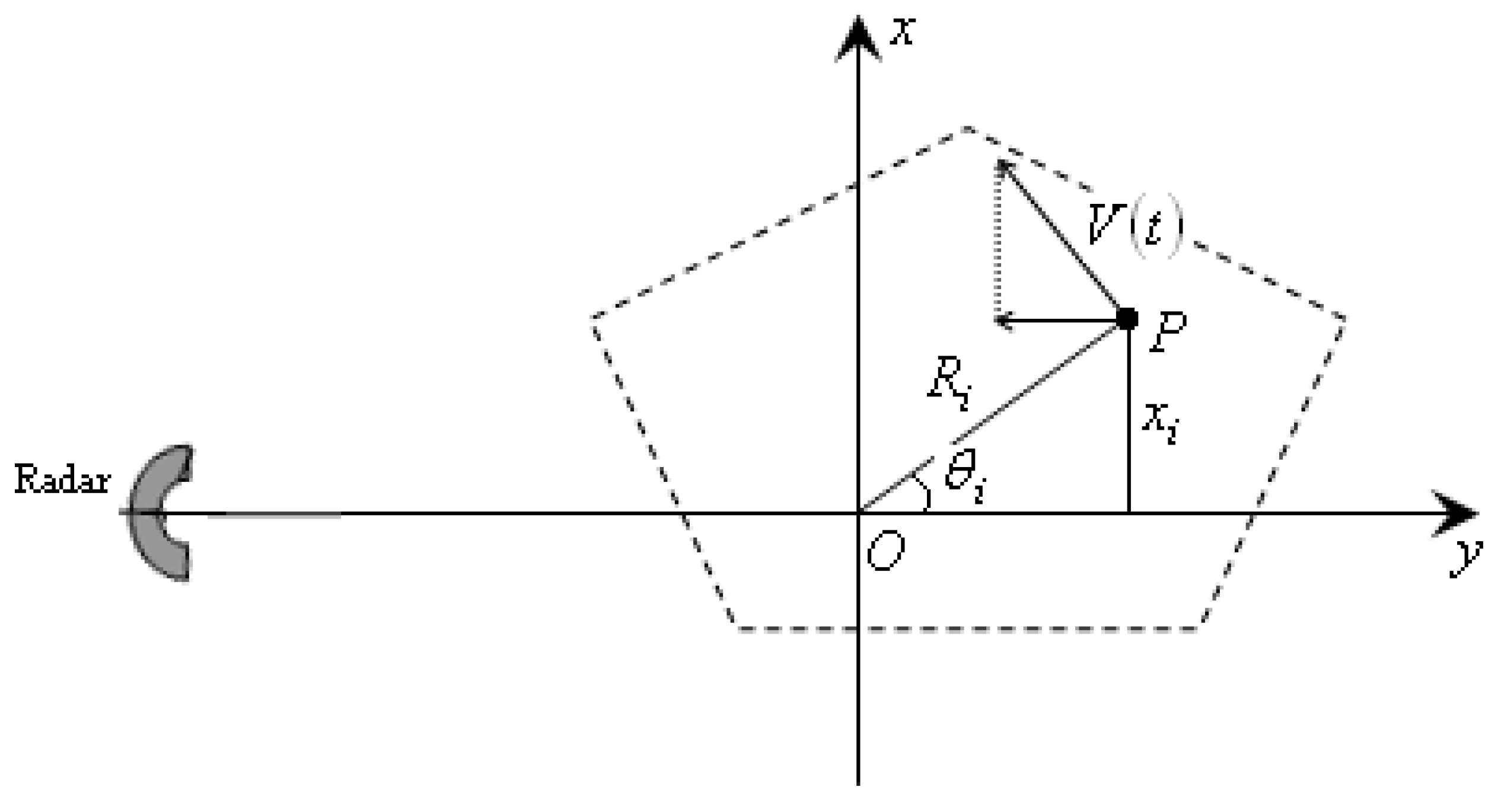
2. Signal Model Construction
3. Parameters Estimation of Multi-Component CPS Based on the MDPT
3.1. The Definition of the DPT
3.2. Parameters Estimation of Multi-Component CPS Based on the MDPT
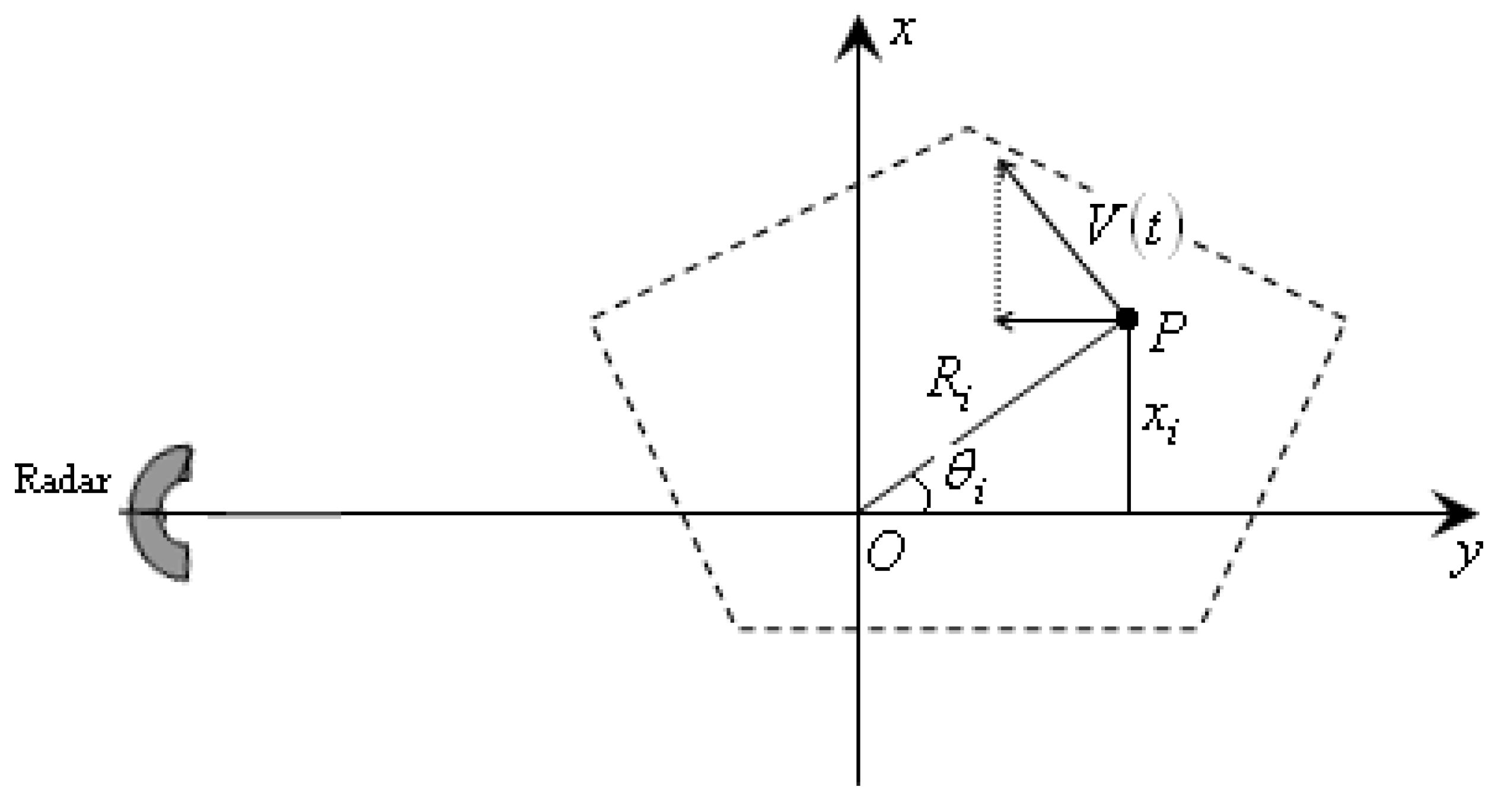
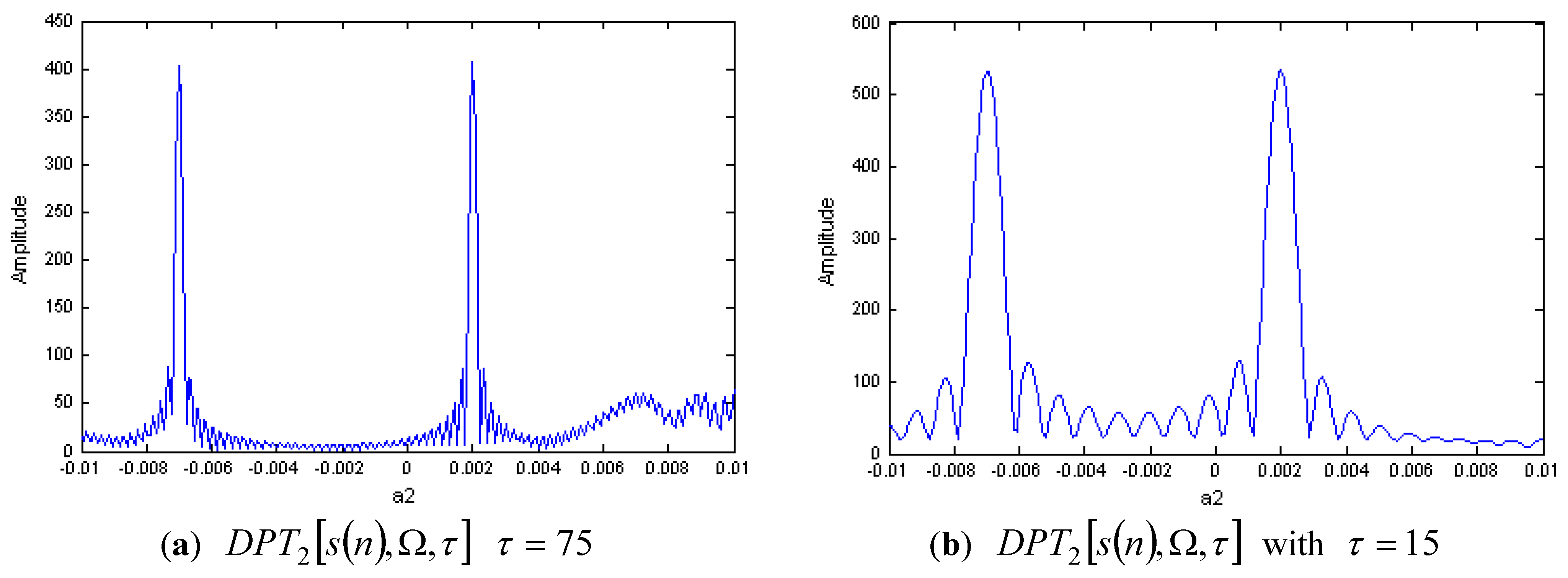
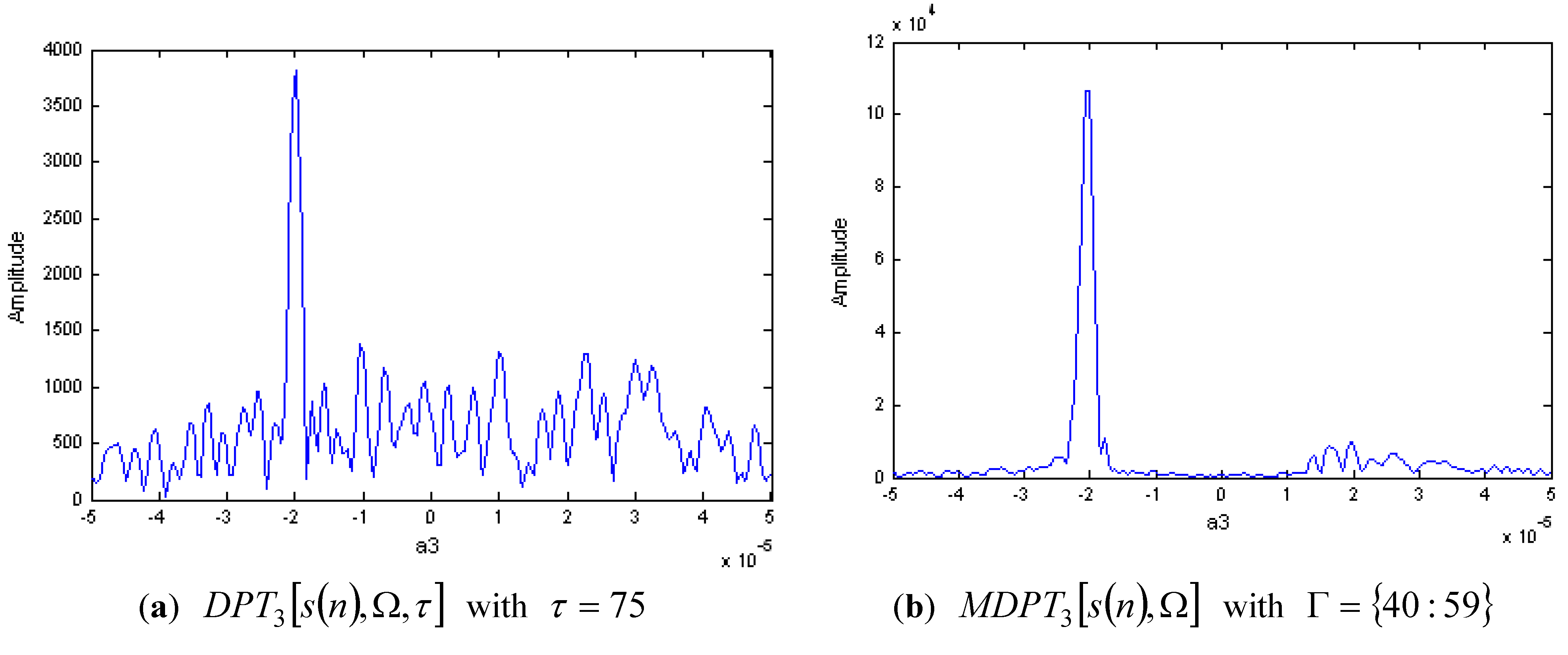
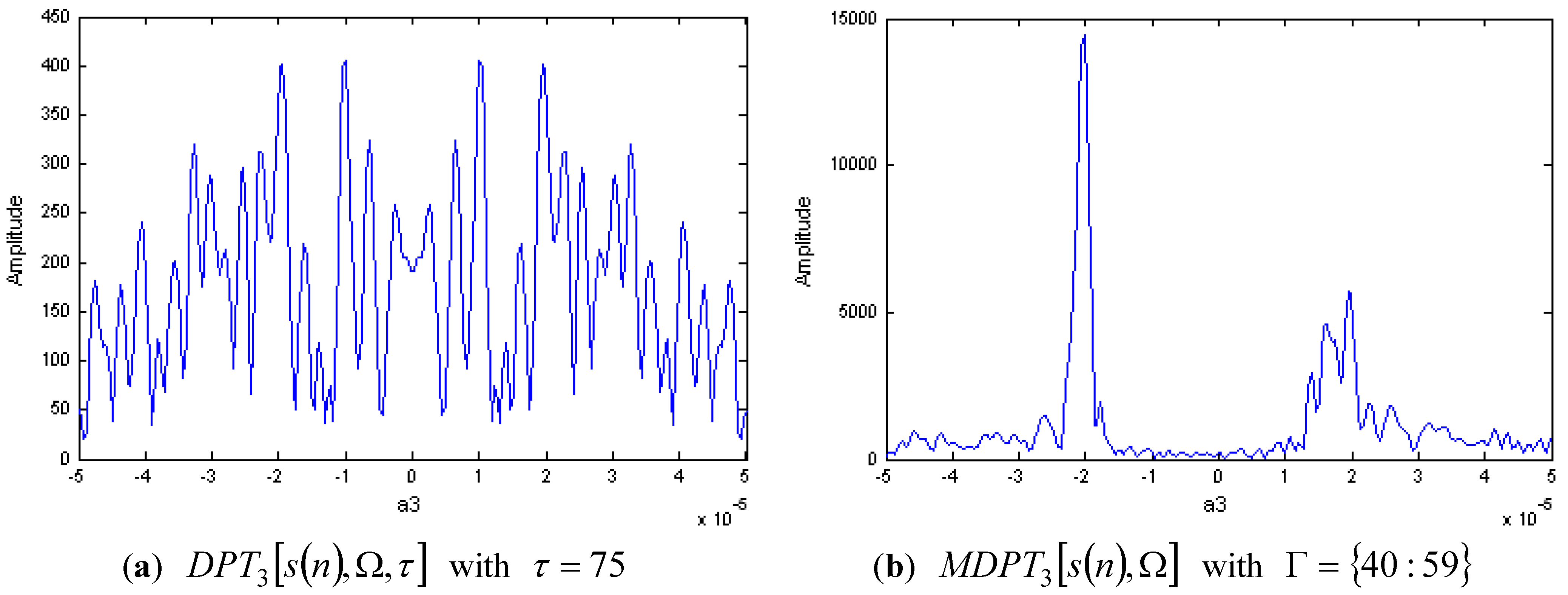
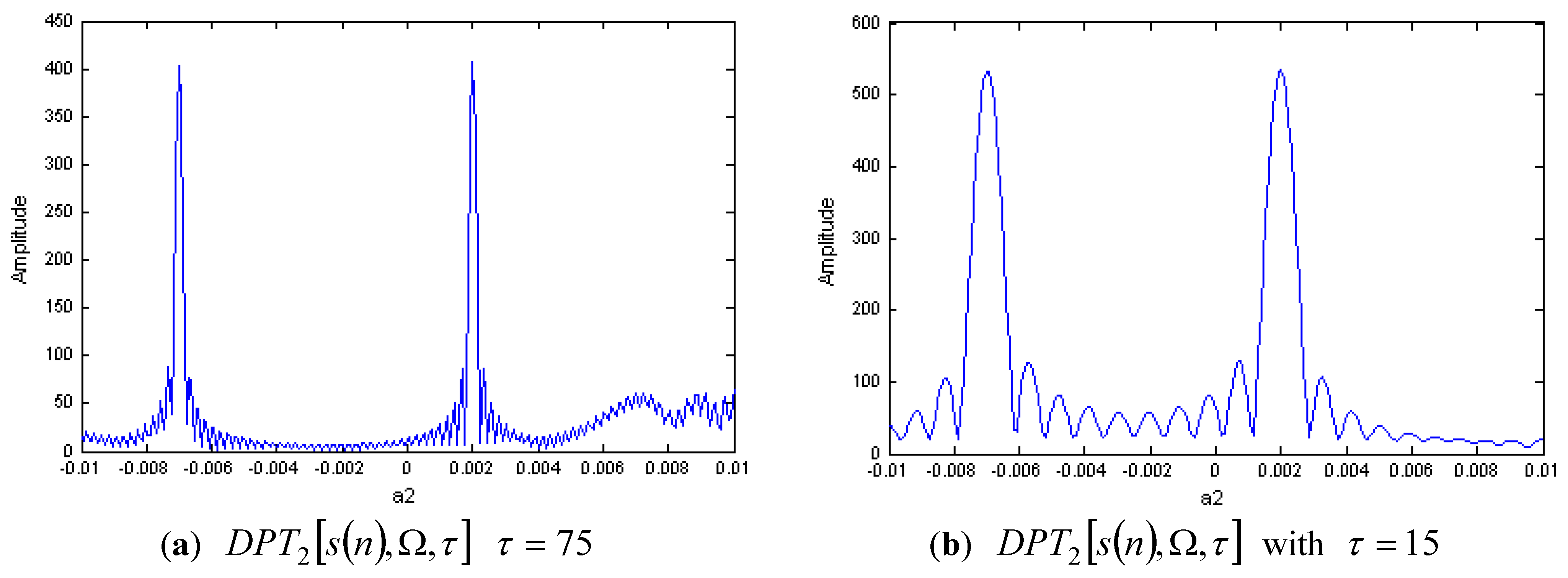
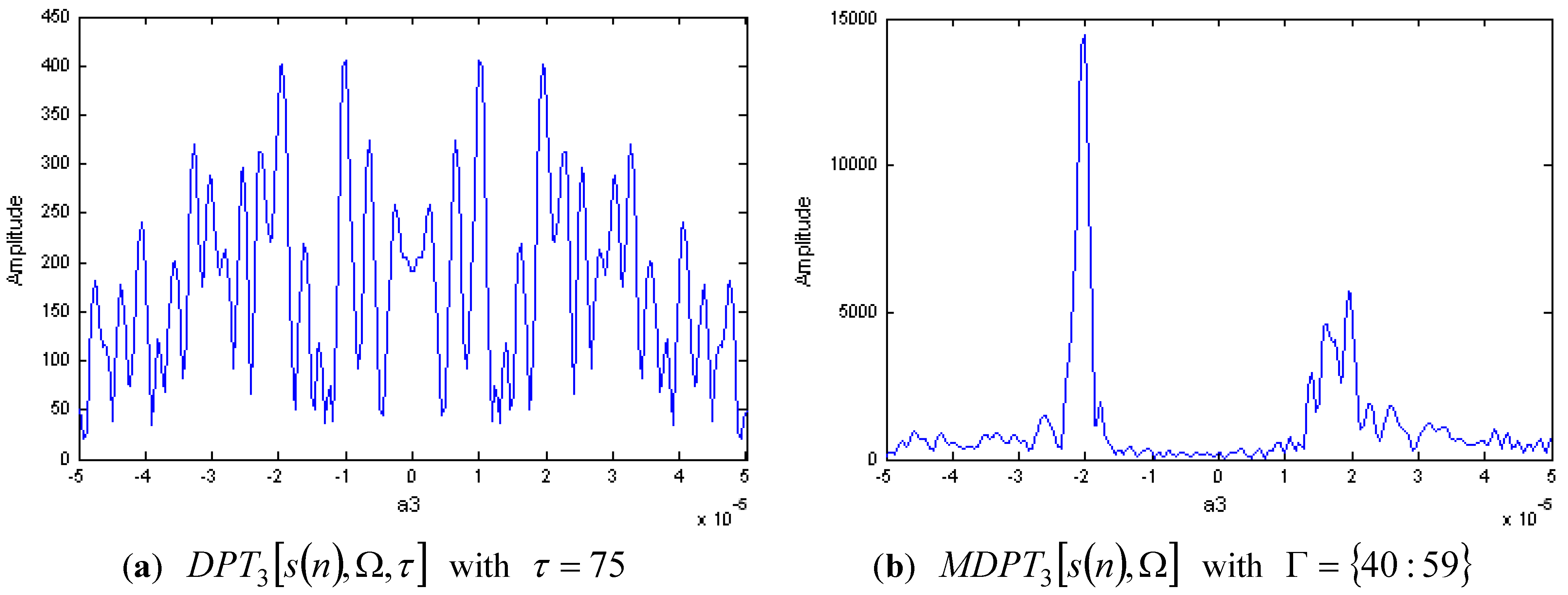
3.3. Numerical Examples

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components (i) | Ai | ai,1 | ai,2 |
|---|---|---|---|
| 1 | 1.5 | 0.3 | 2×10–3 |
| 2 | 1.5 | −0.2 | −7×10–3 |
| Components (i) | Ai | ai,1 | ai,2 | ai,3 |
|---|---|---|---|---|
| 1 | 1.5 | 0.3 | 2×10–3 | 2×10–5 |
| 2 | 2.5 | 0.7 | –5×10–3 | –2×10–5 |

| Components (i) | Ai | ai,1 | ai,2 | ai,3 |
|---|---|---|---|---|
| 1 | 1.5 | 0.3 | 2×10–3 | 2×10–5 |
| 2 | 1.5 | 0.7 | –5×10–3 | –2×10–5 |
4. ISAR Imaging Algorithm Based on MDPT
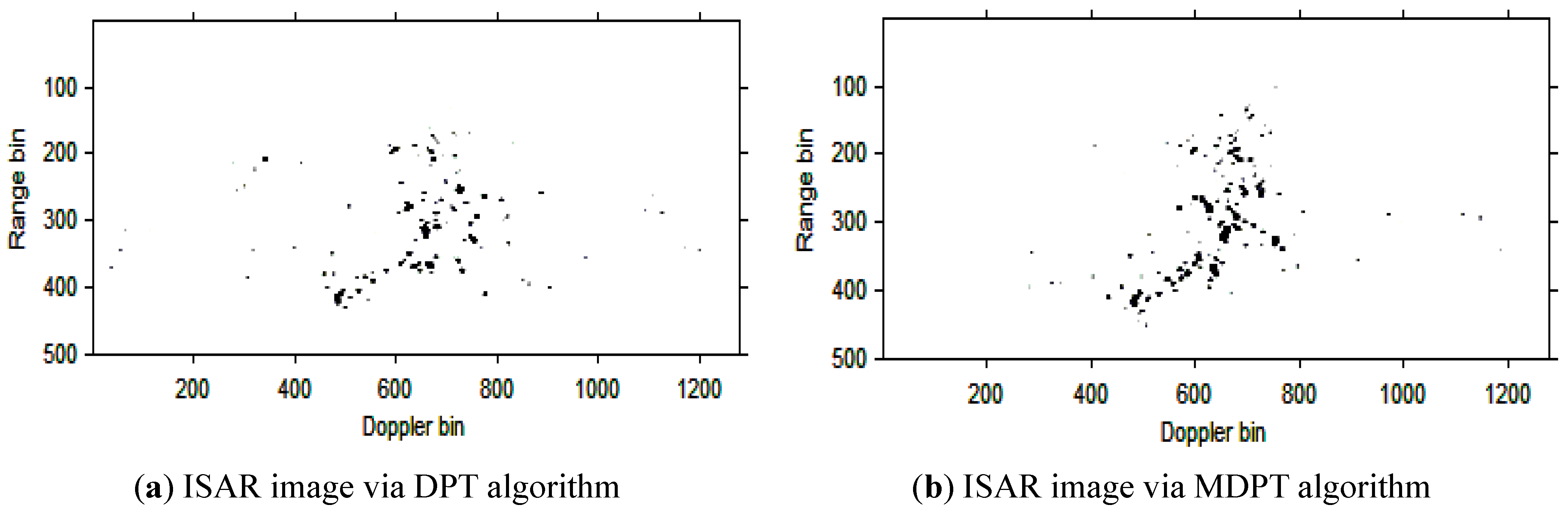
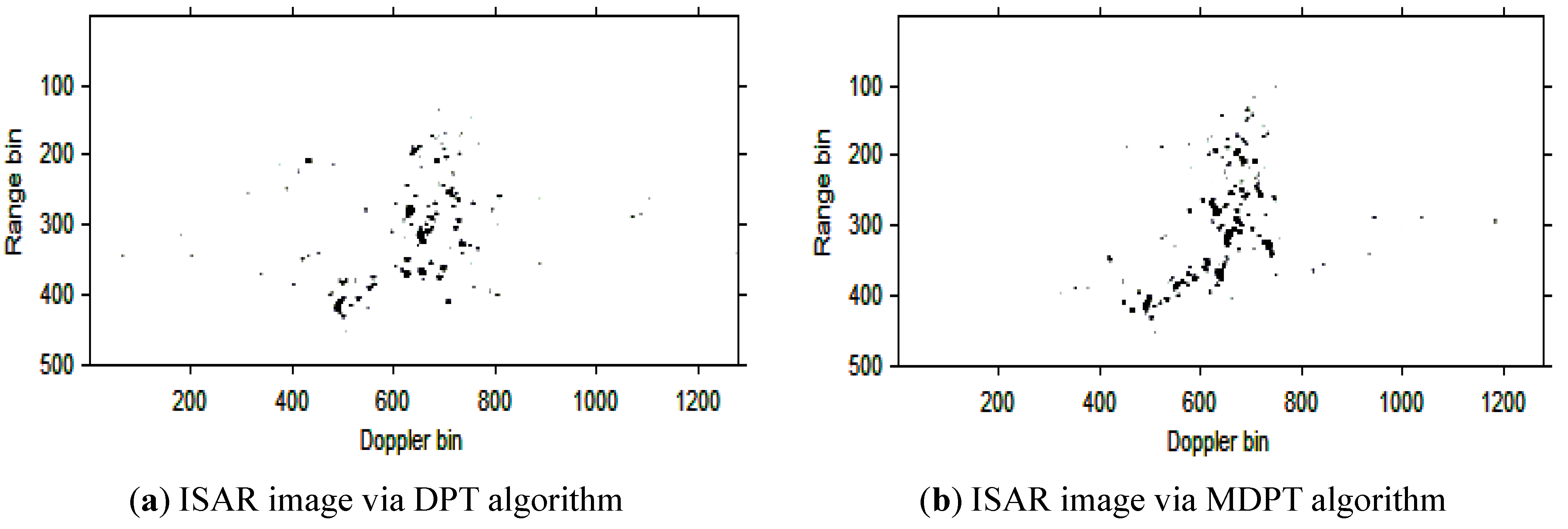
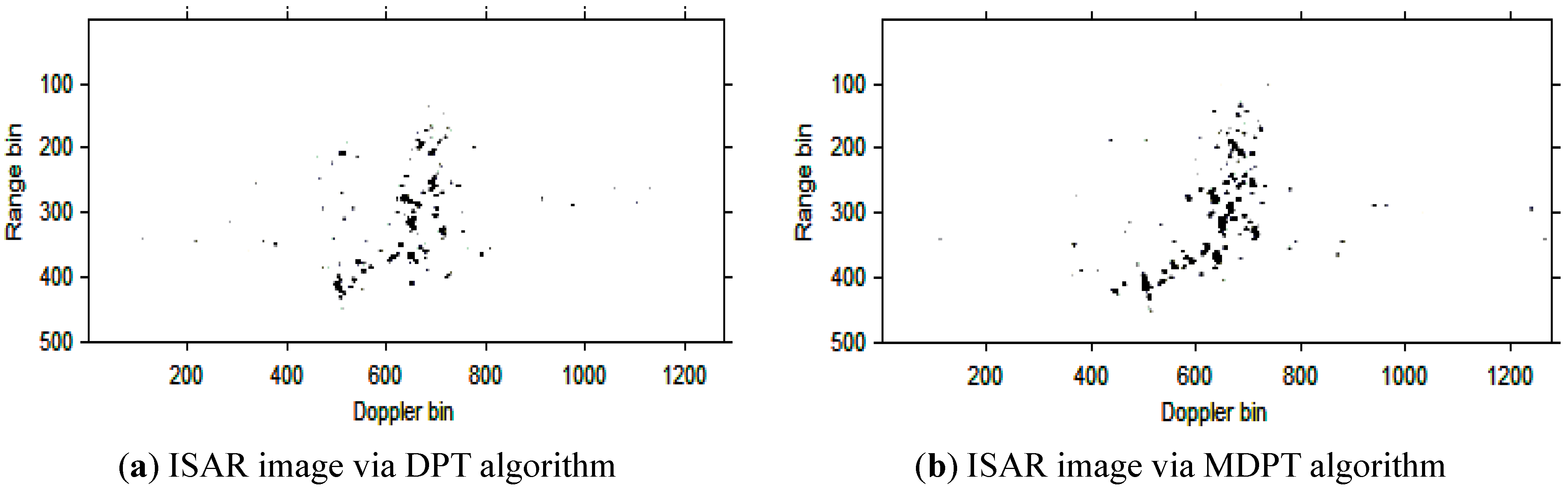
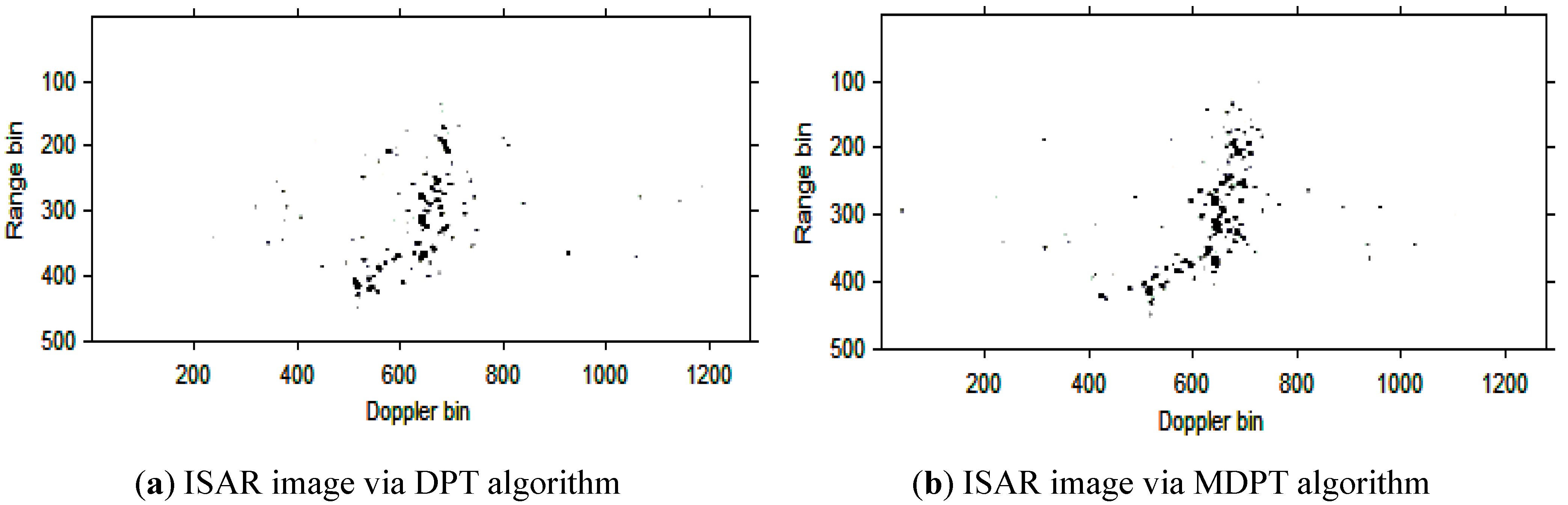
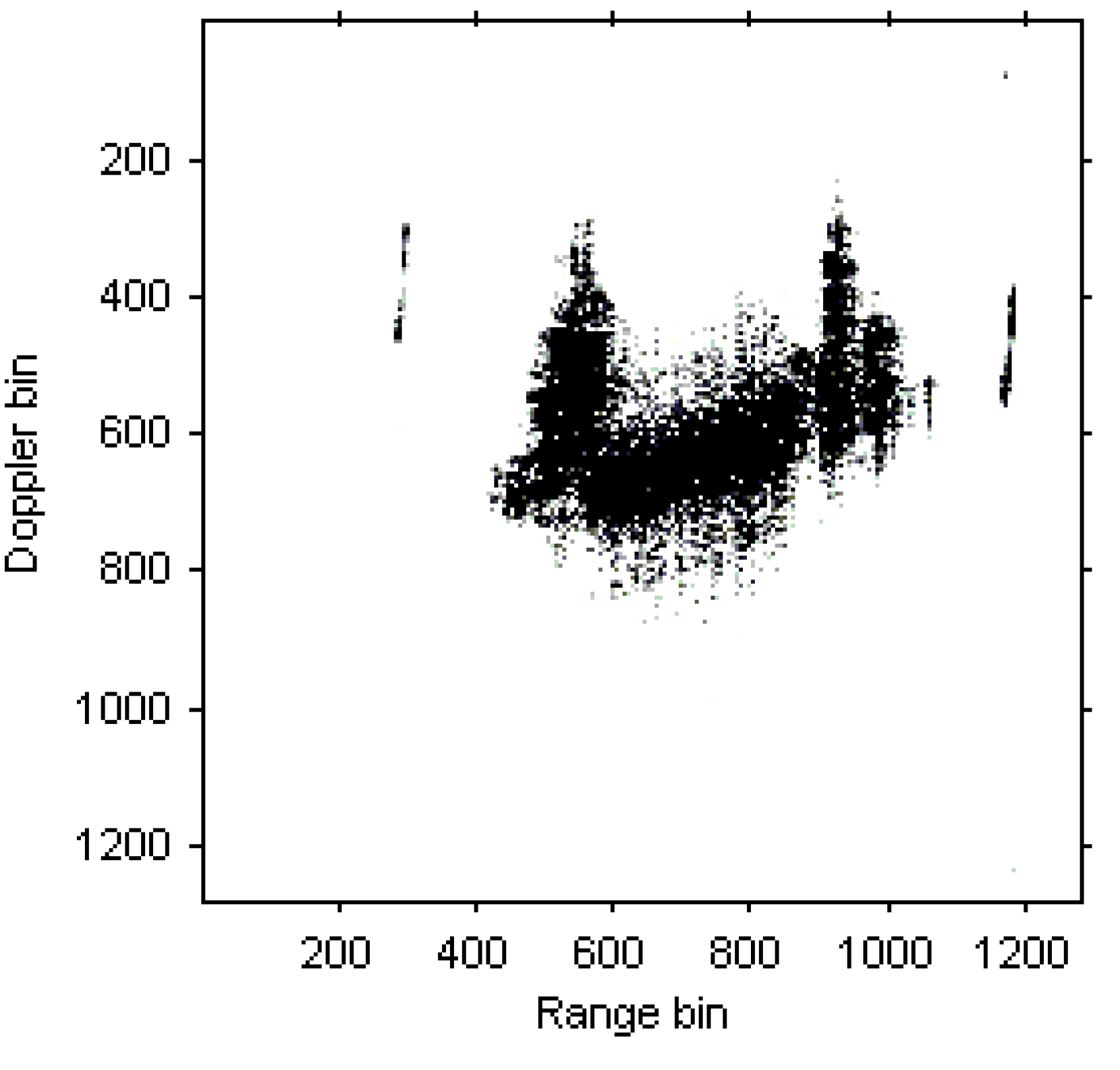
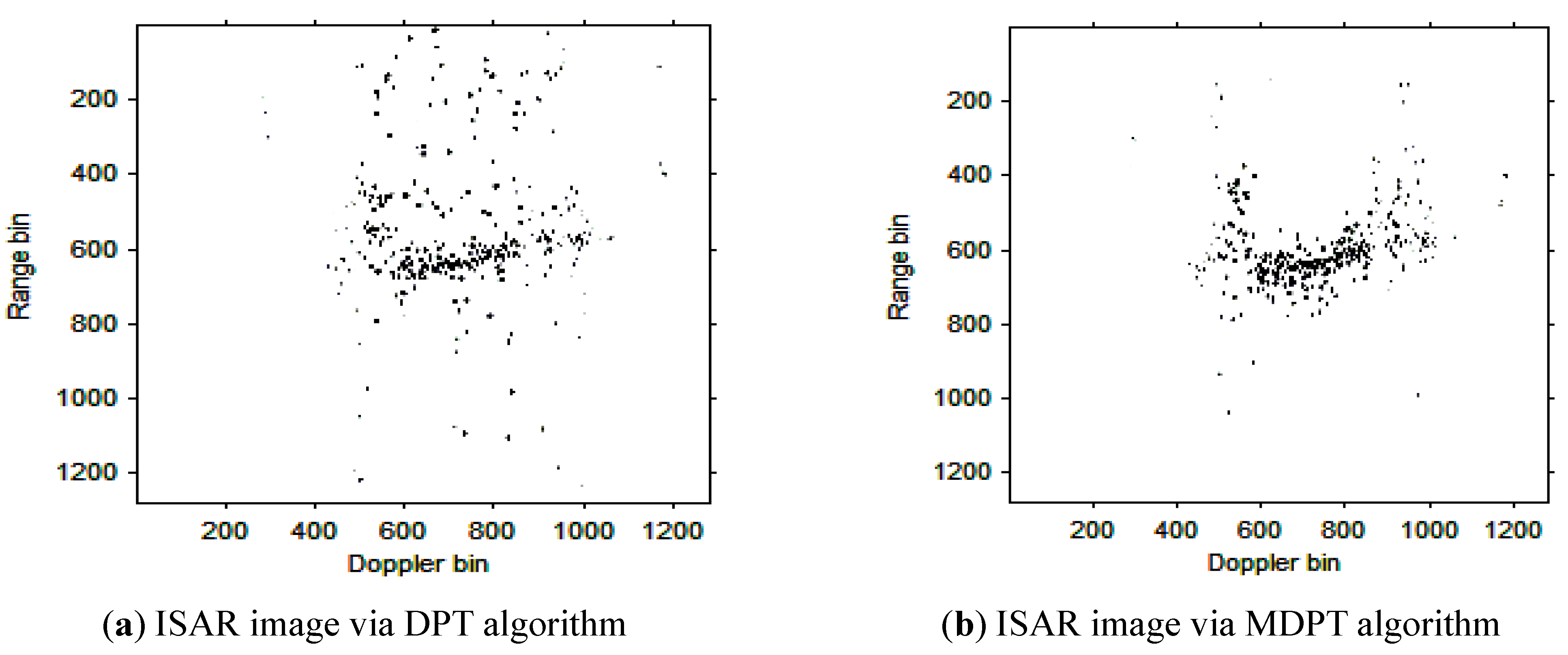
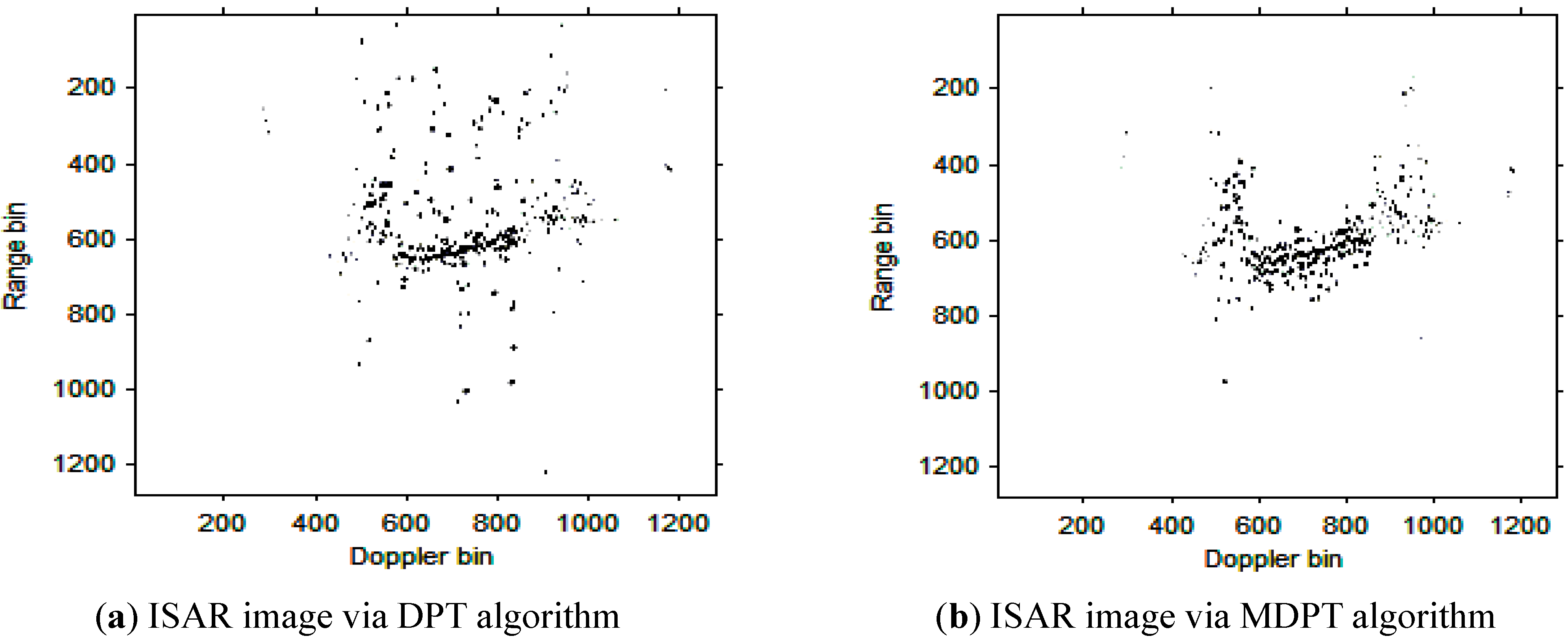
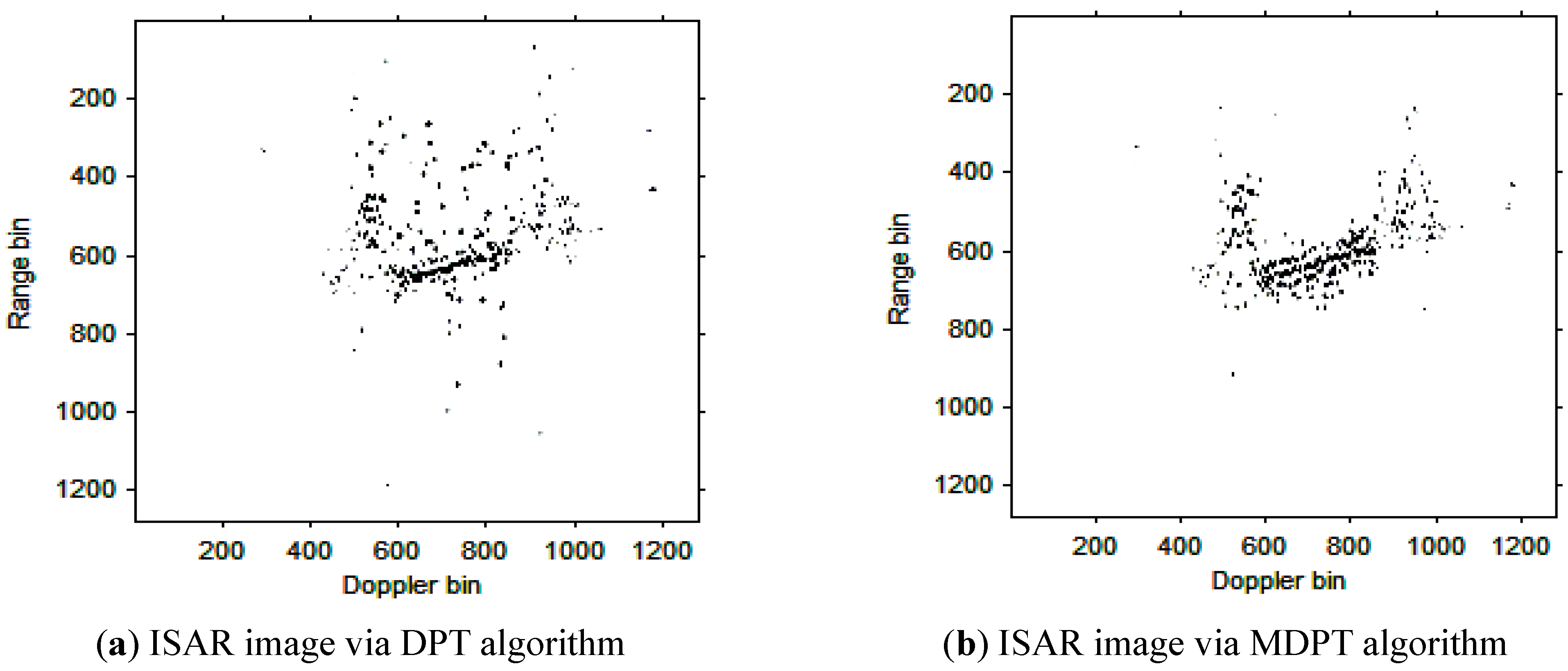
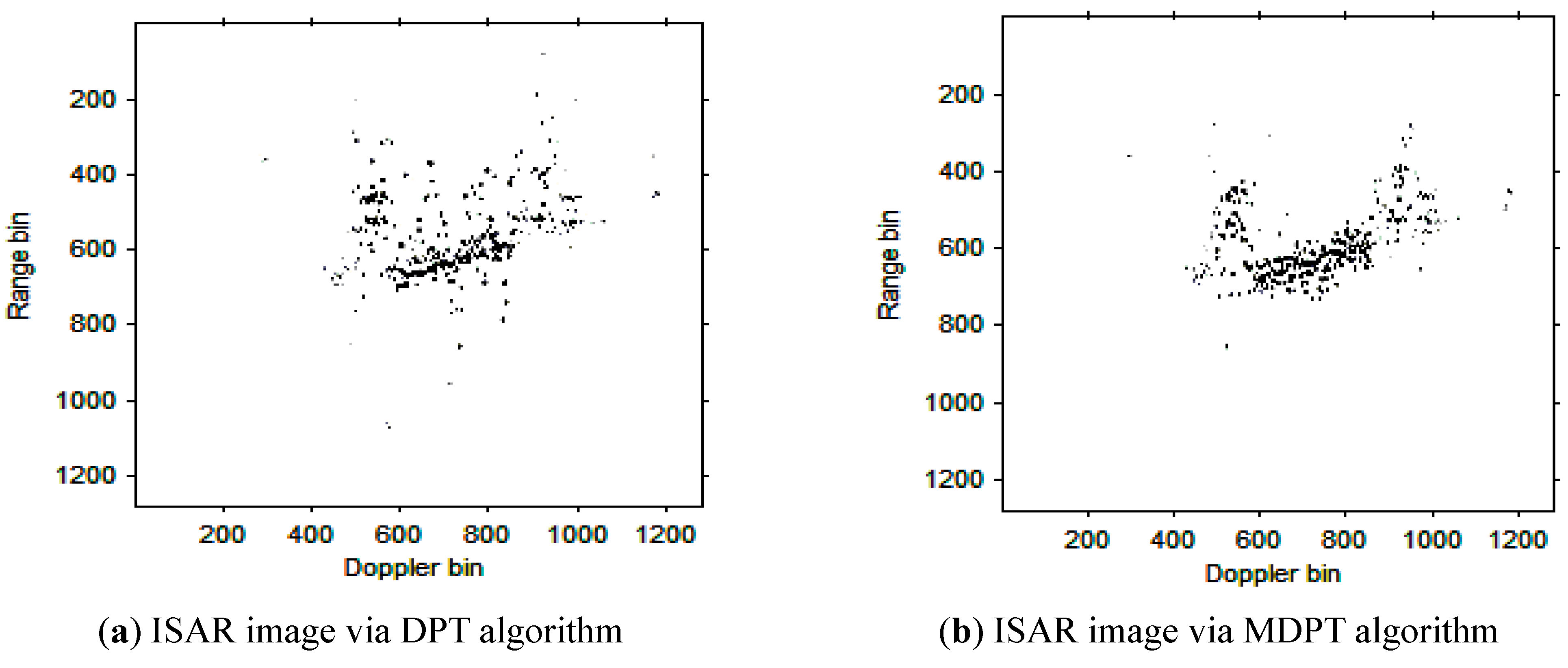
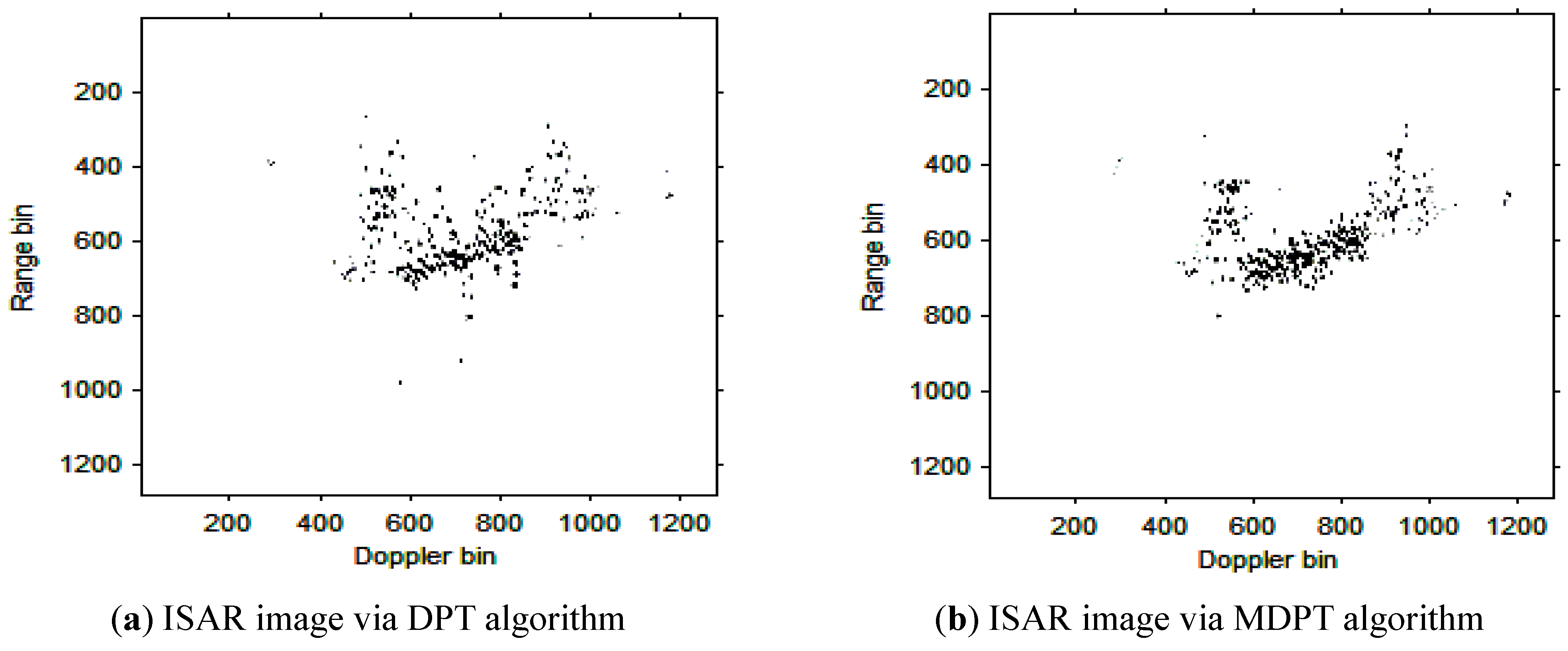
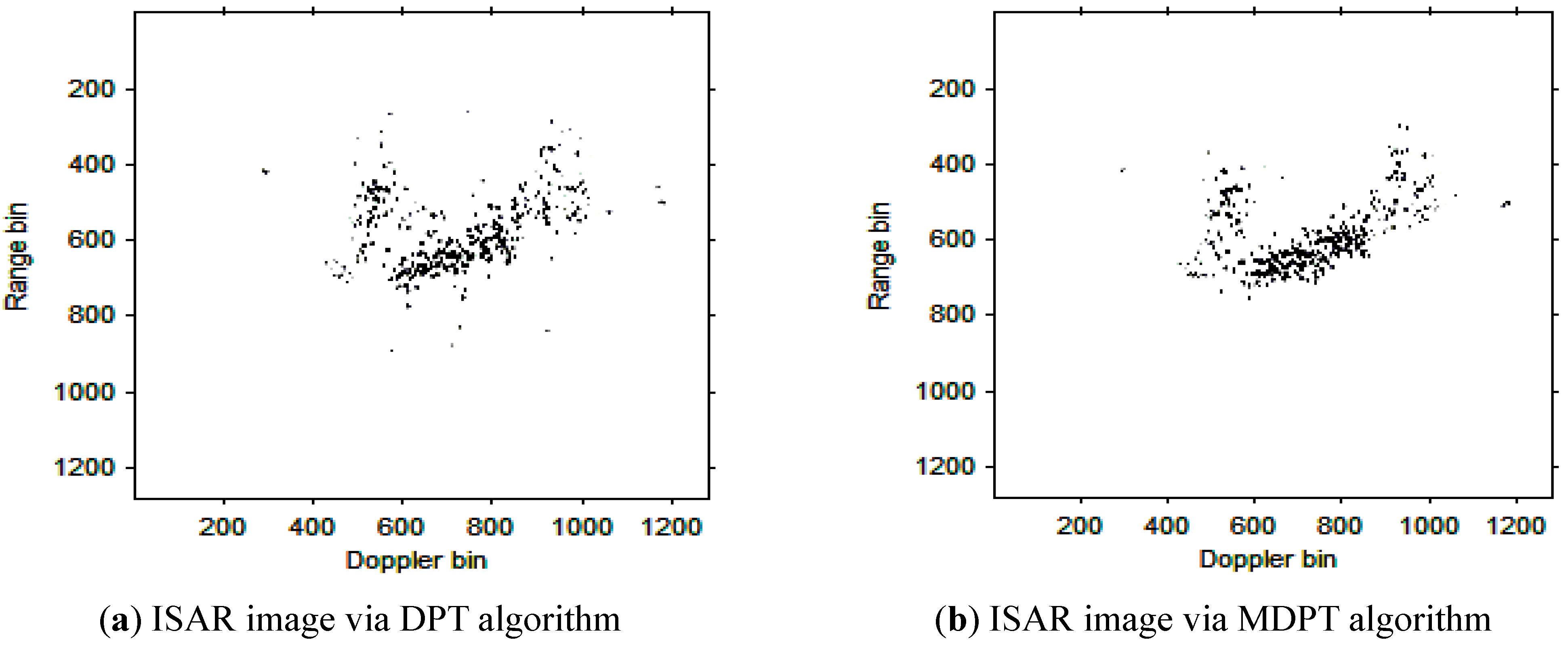
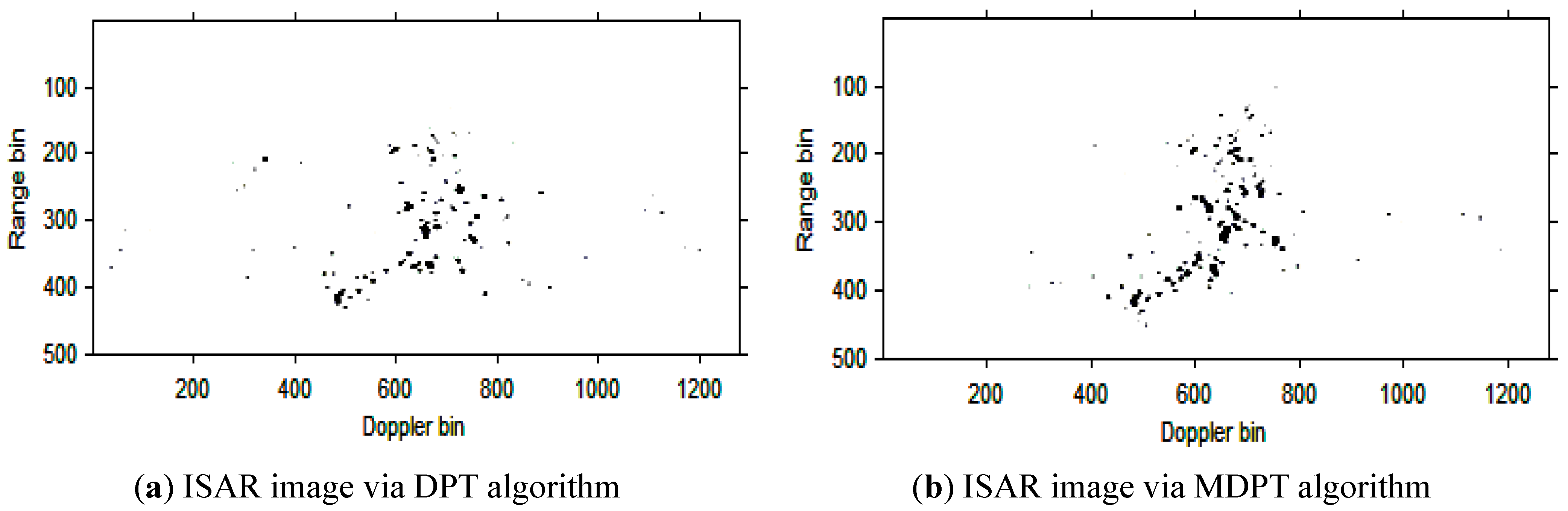
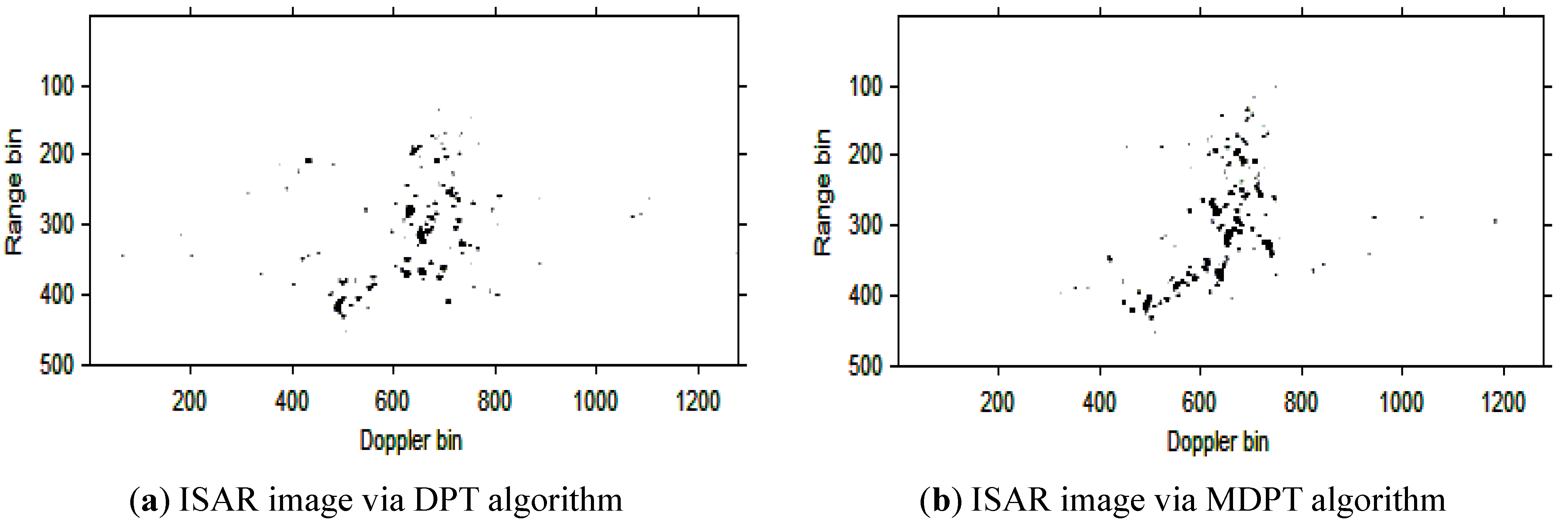
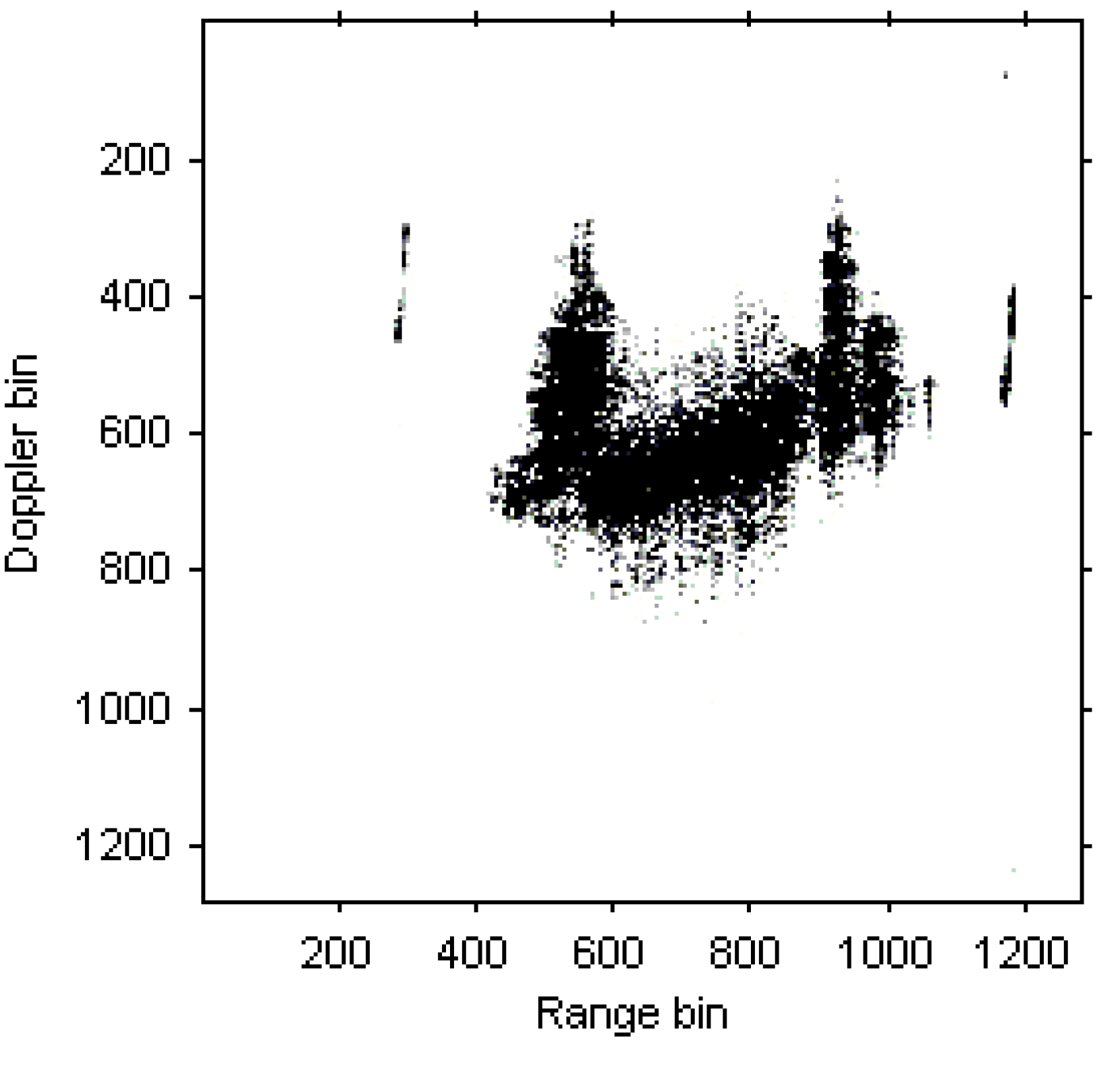
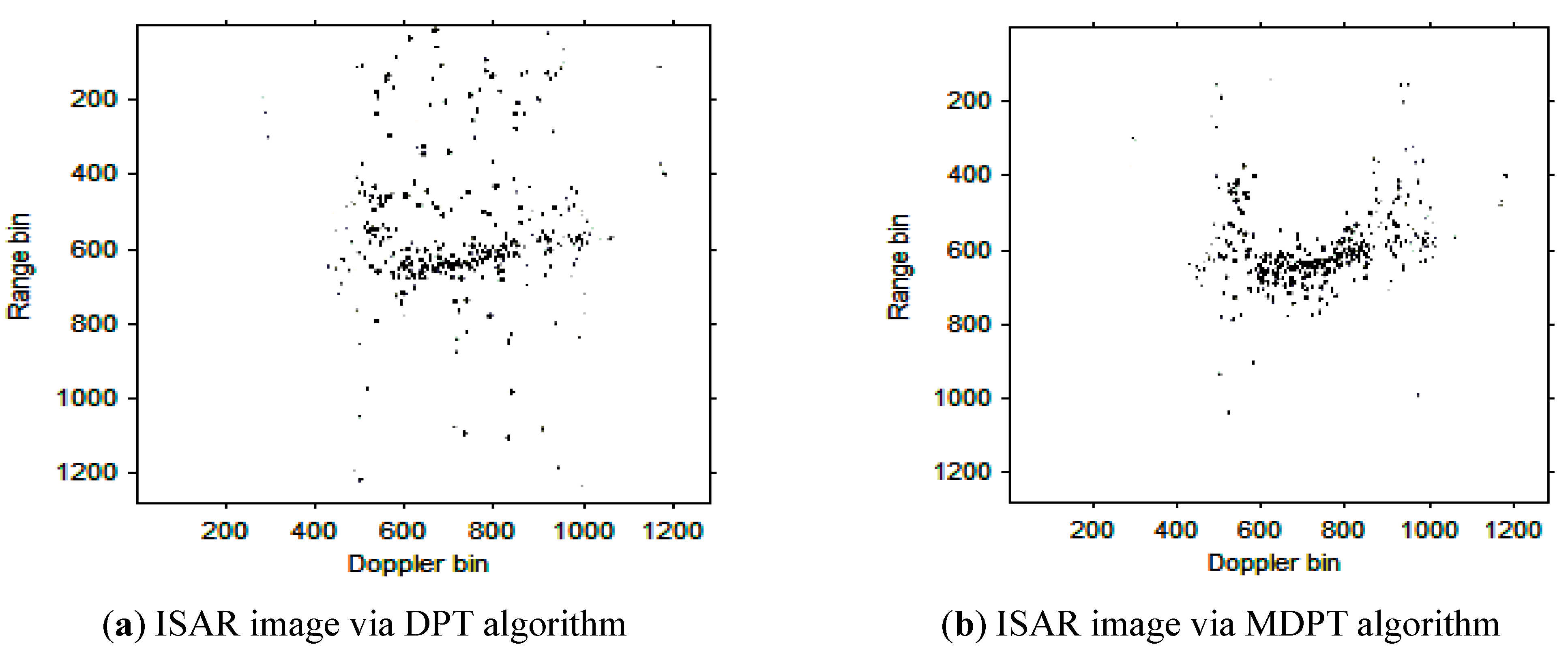
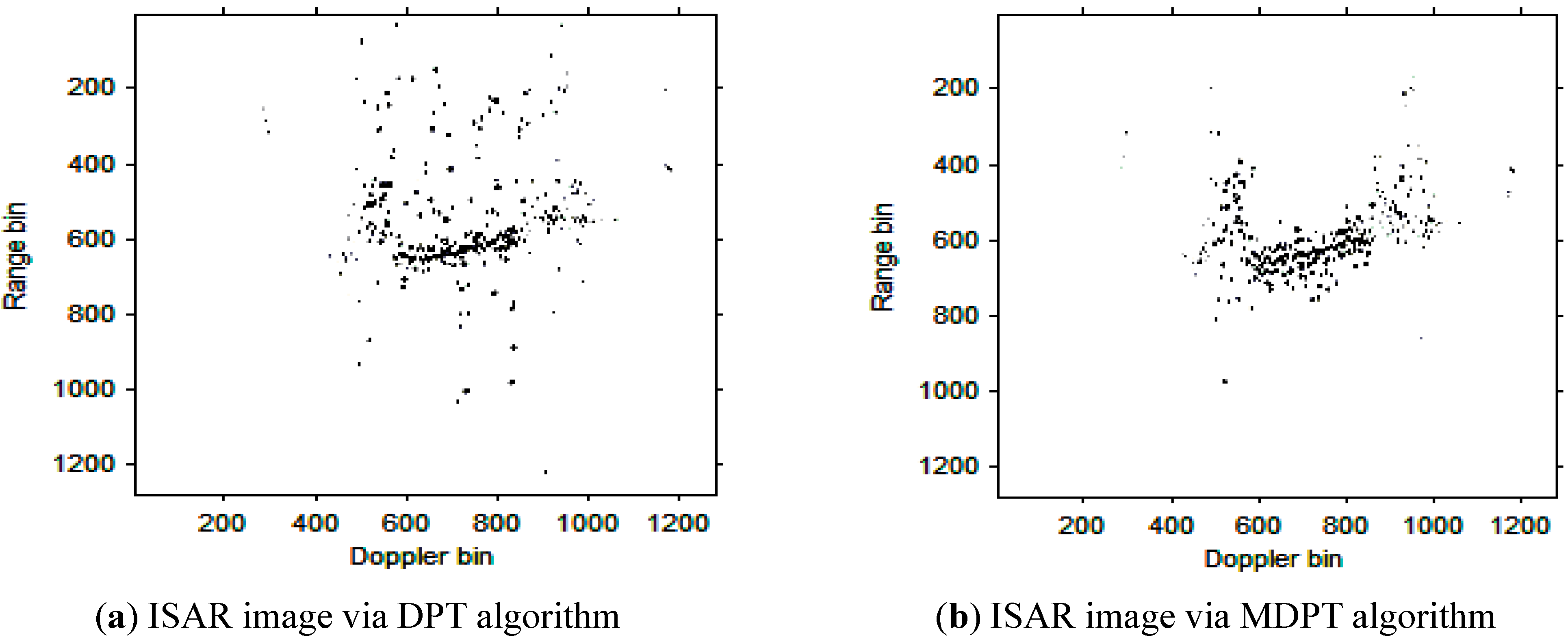
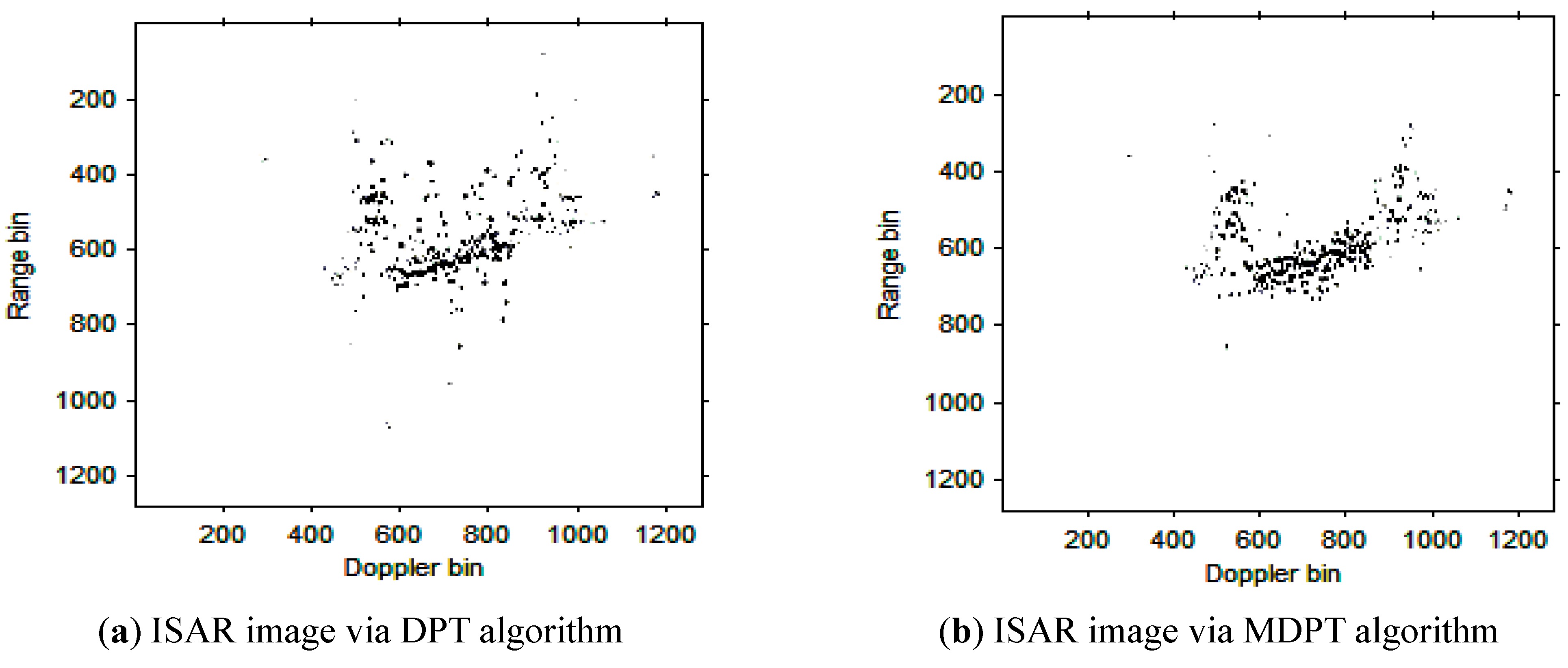
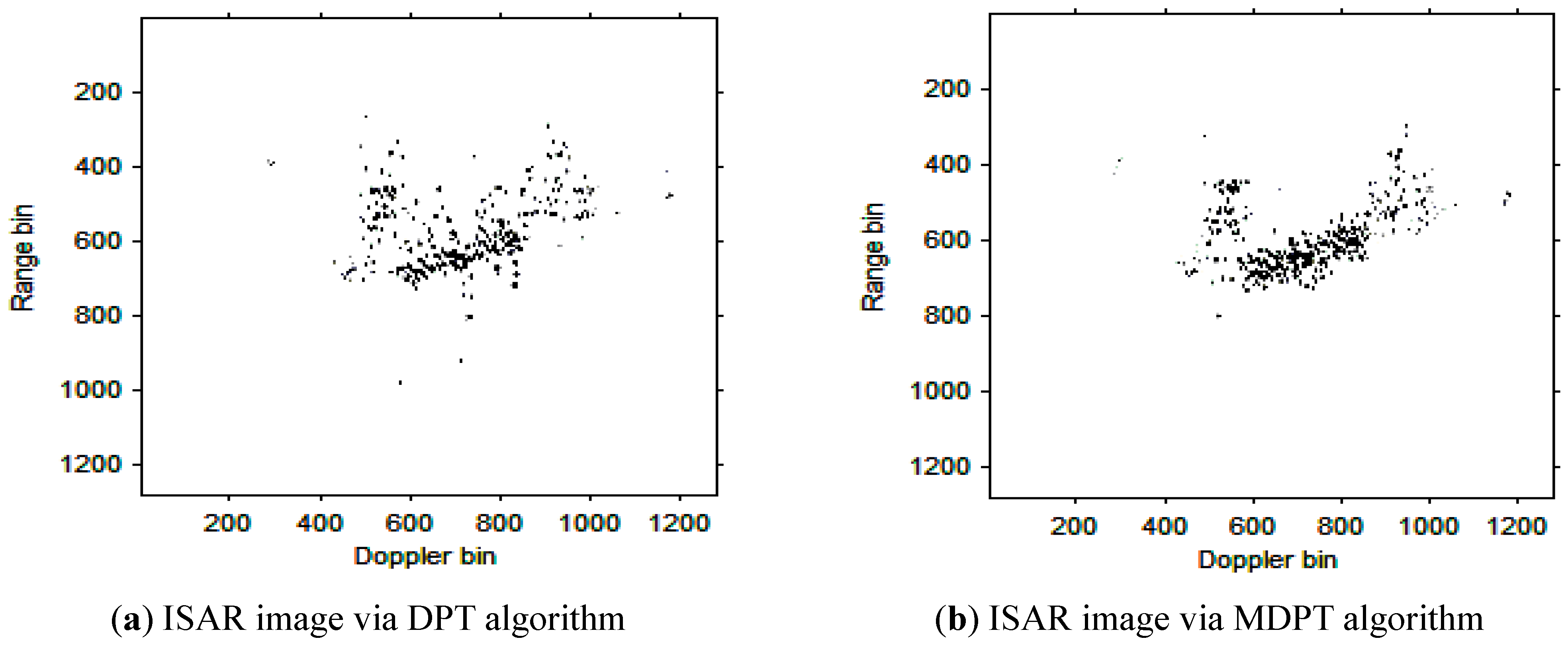
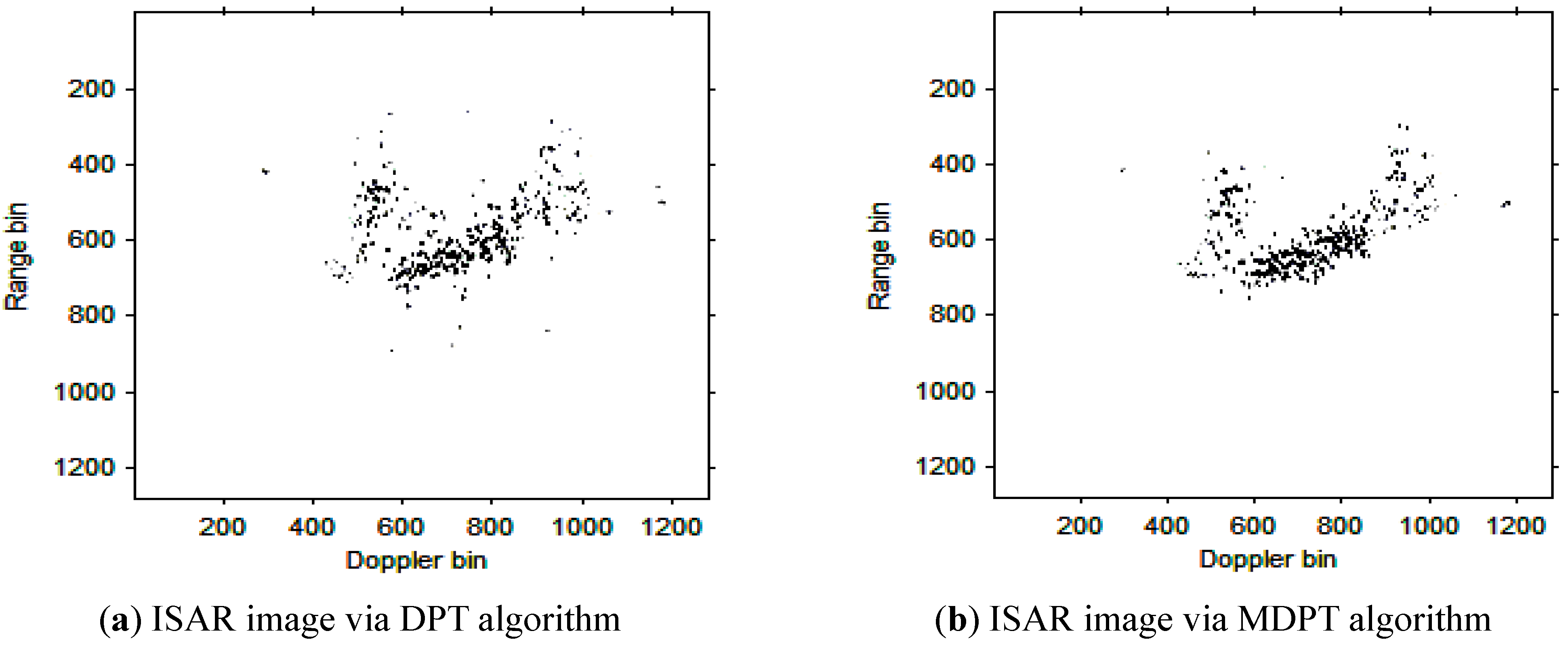
5. ISAR Imaging Results
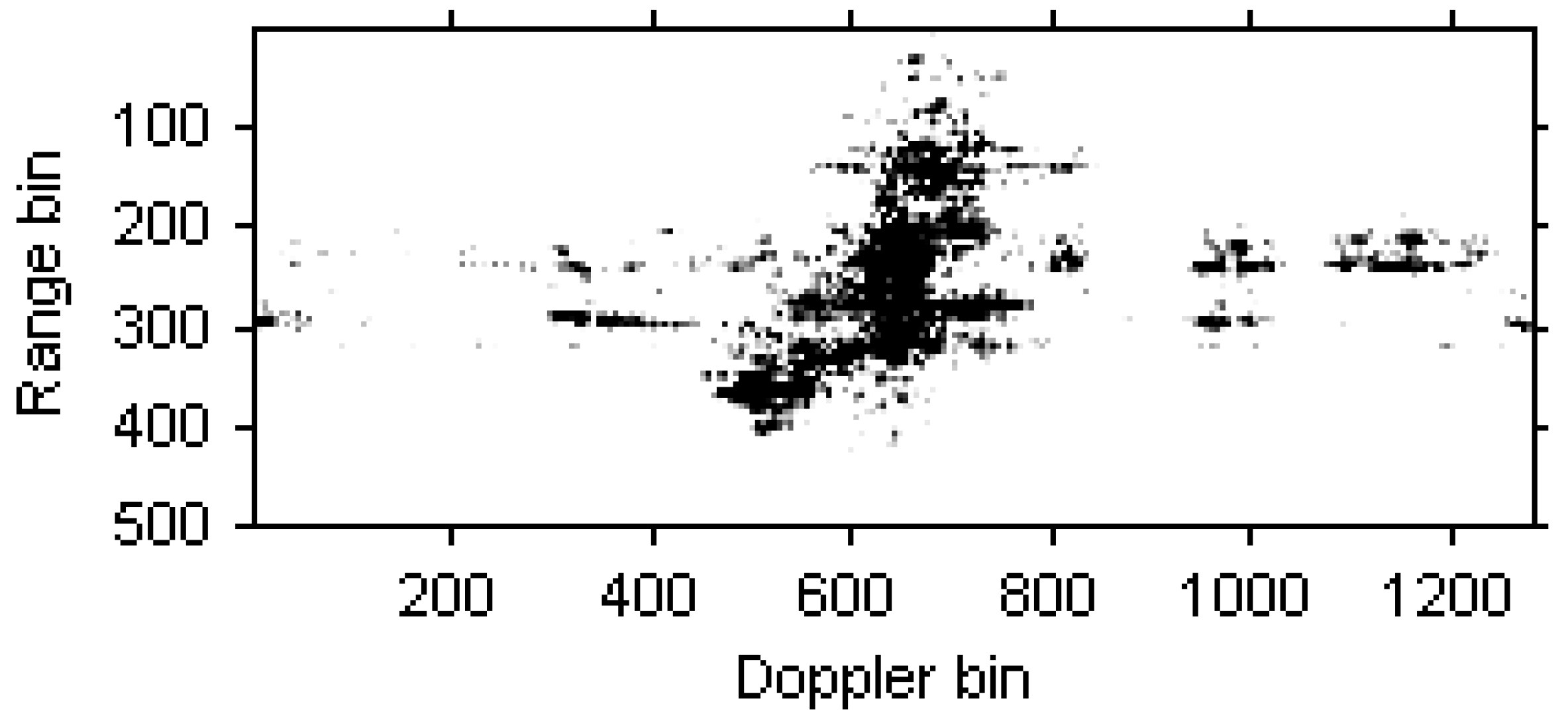
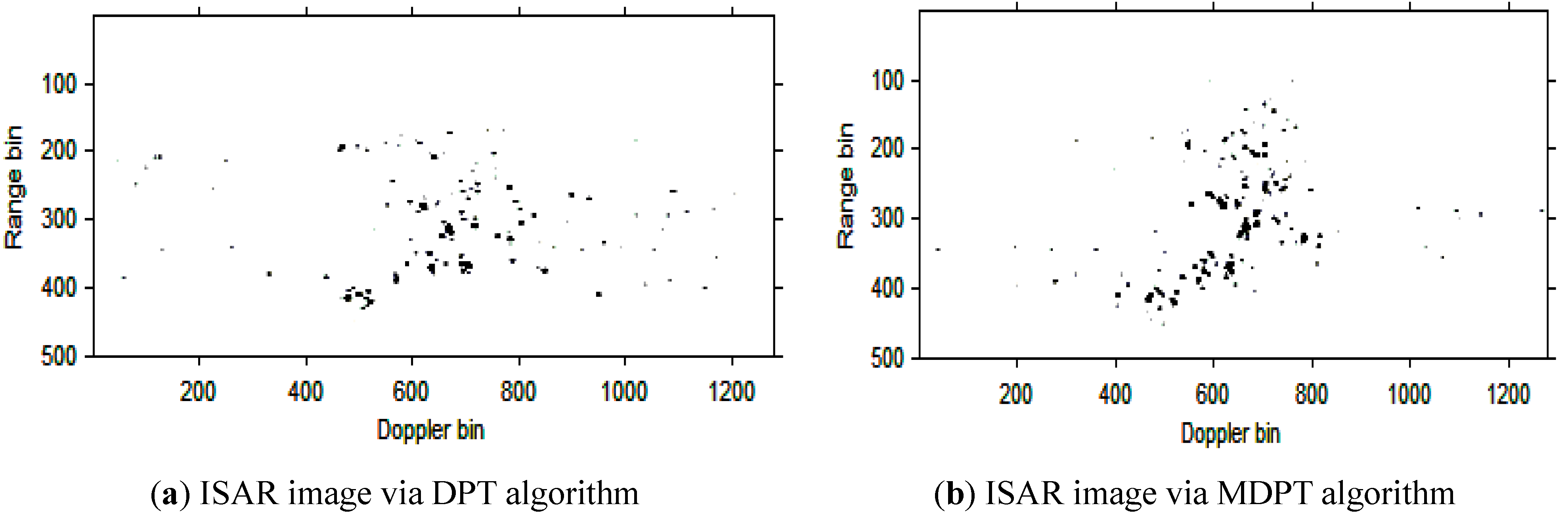
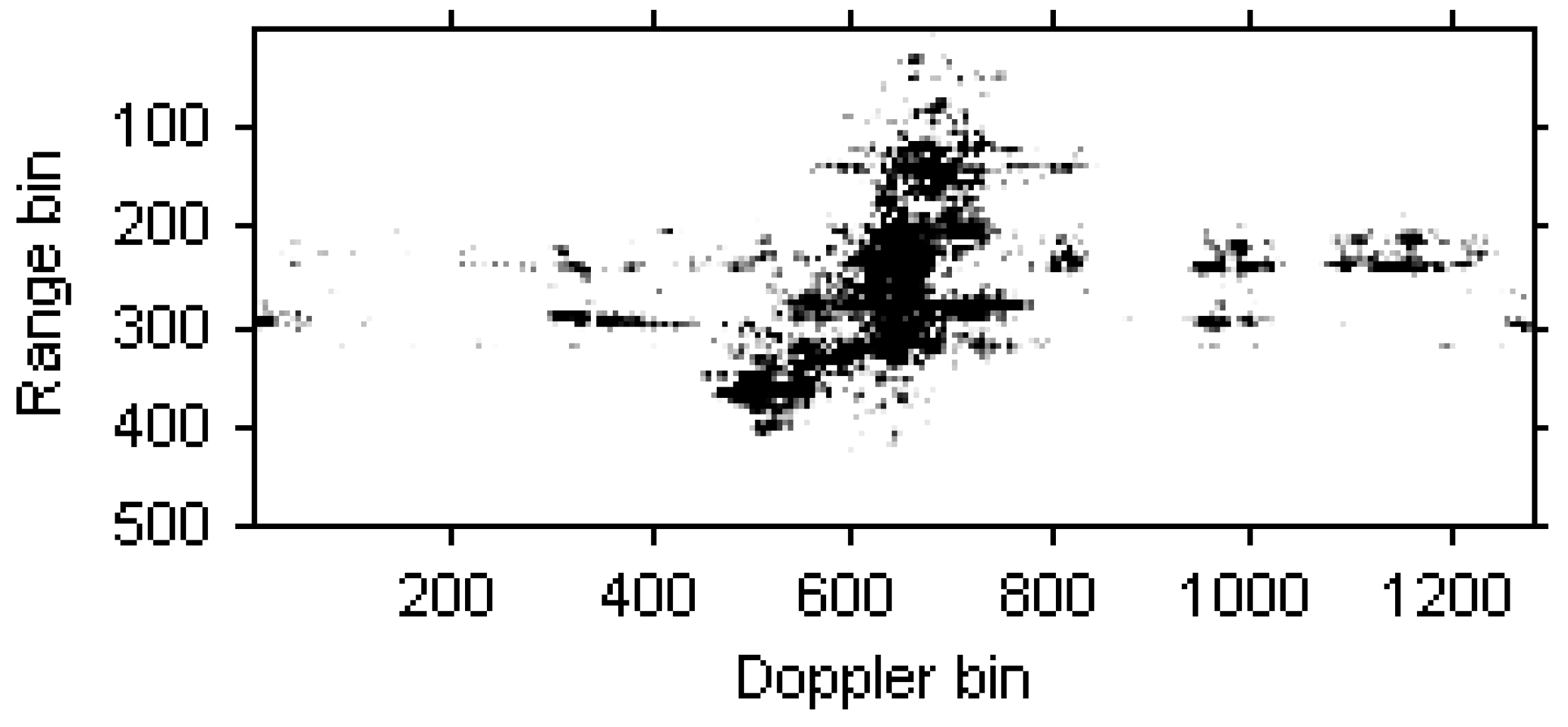
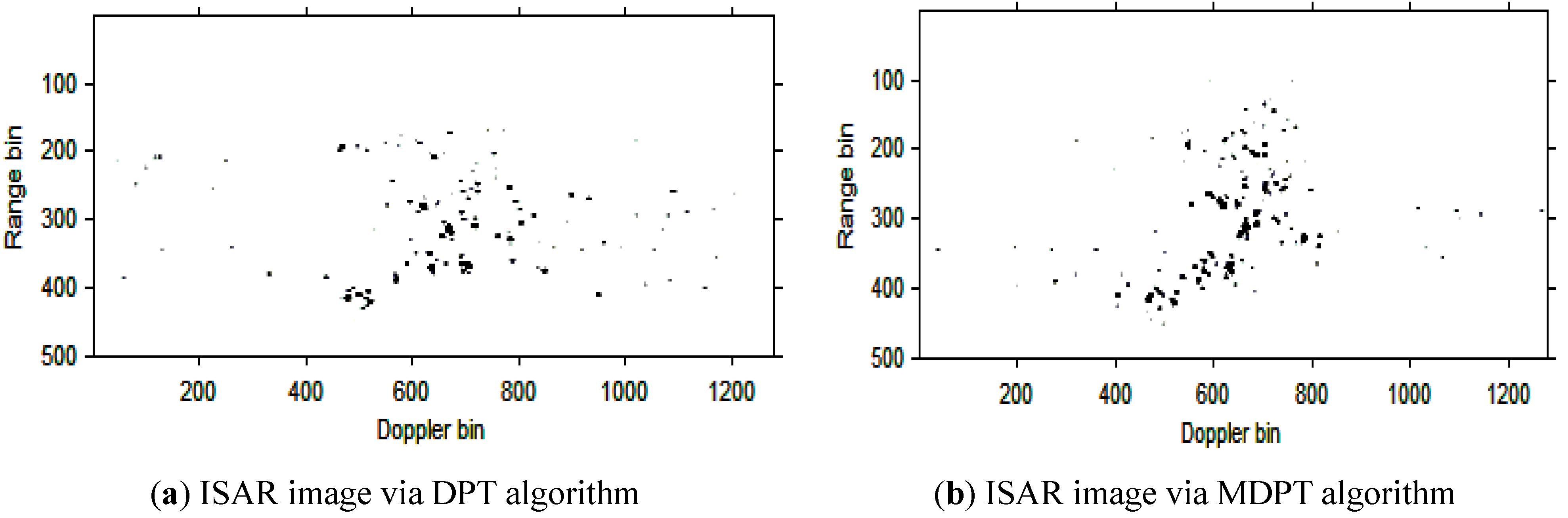
5.1. Real Aircraft Data
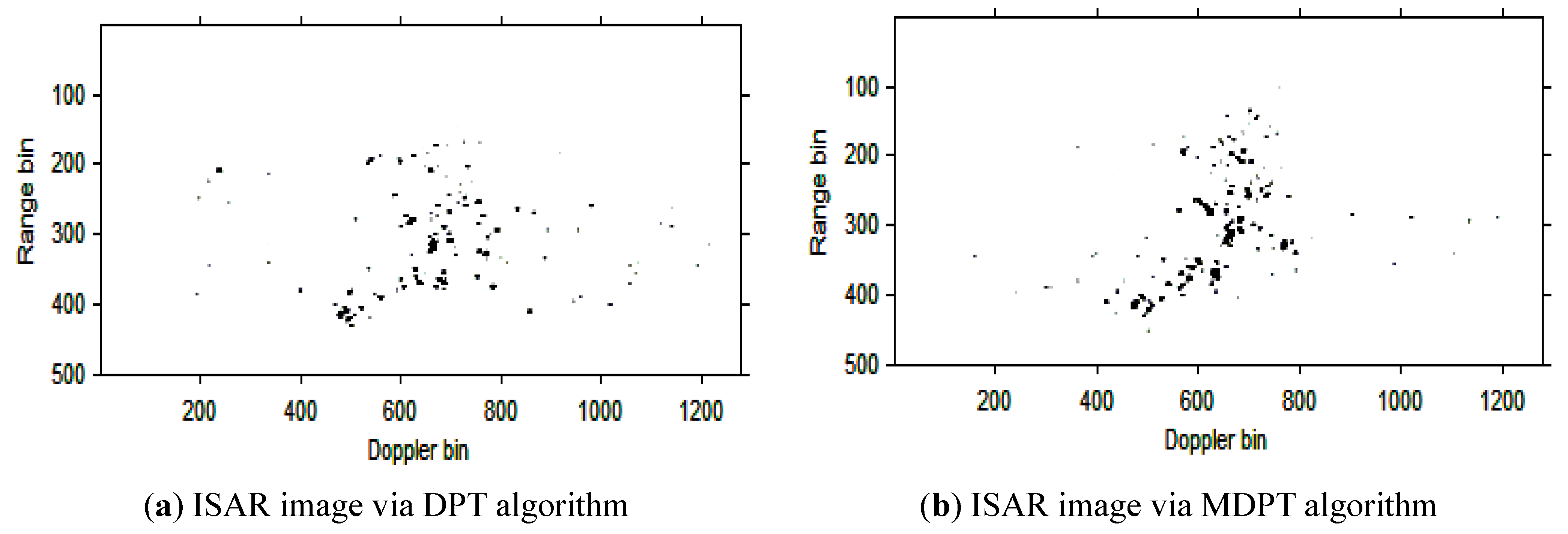
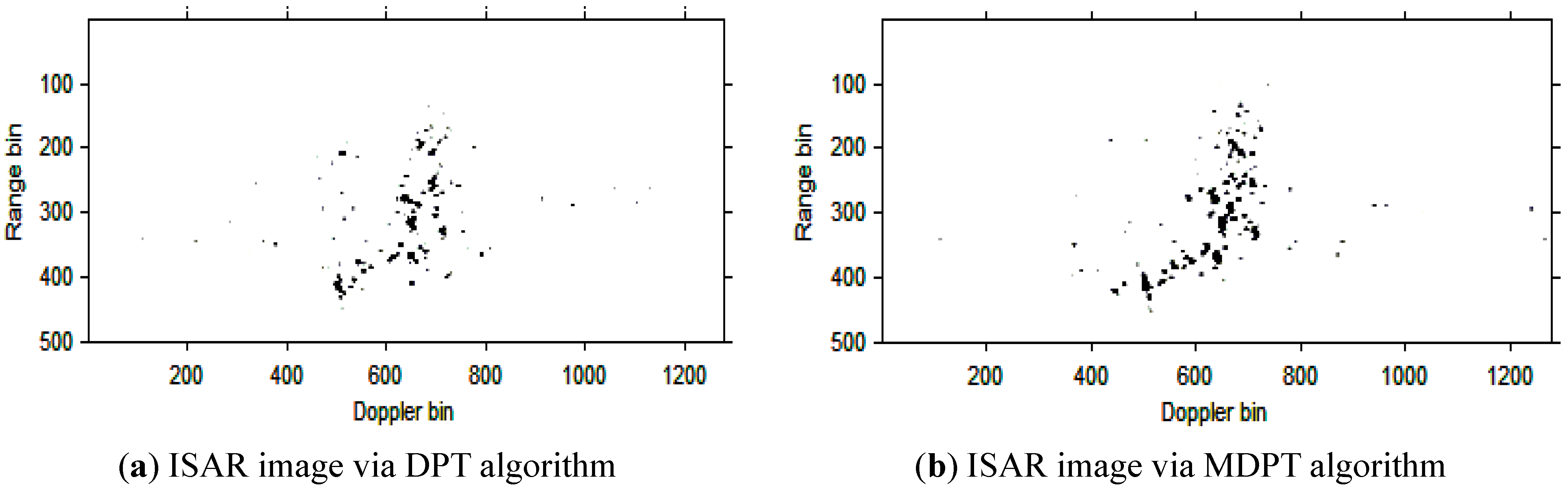
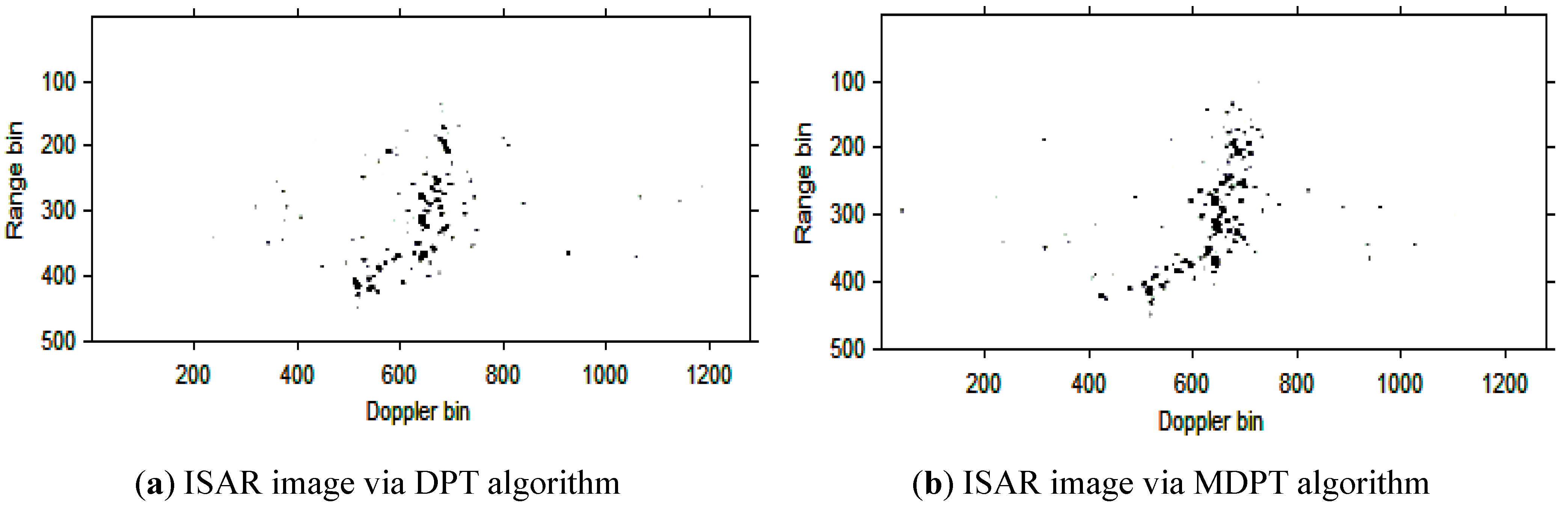
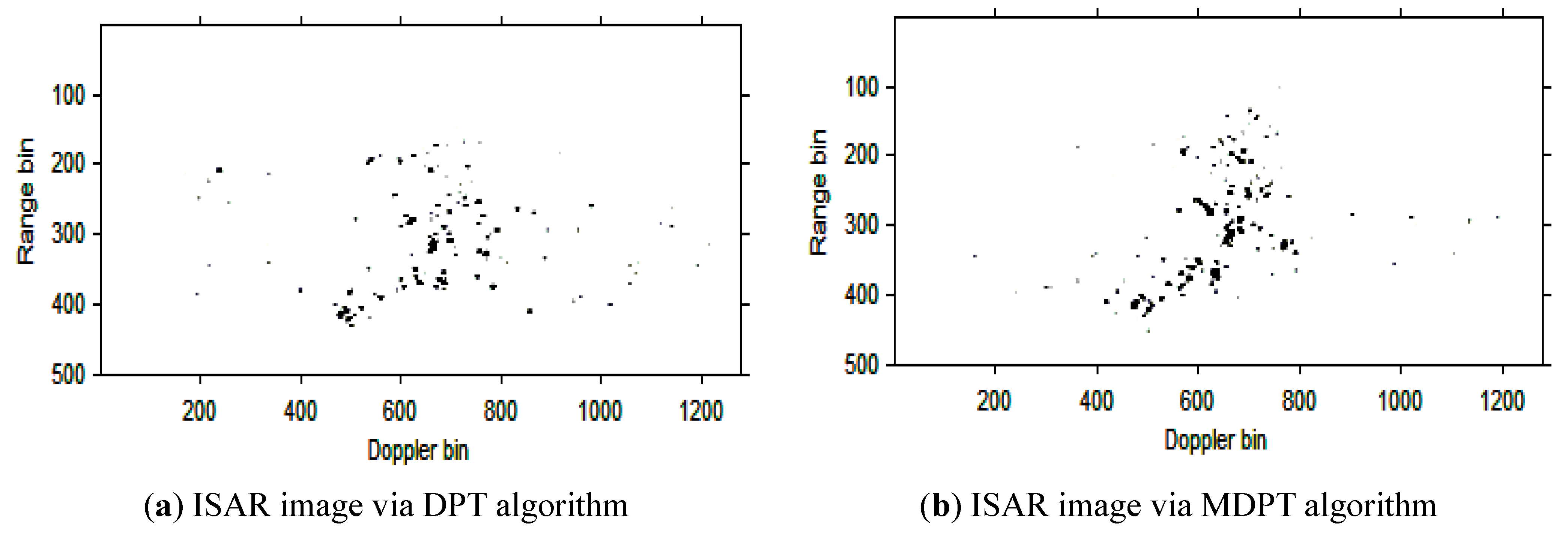
5.2. Real Ship Data

6. Conclusions
Acknowledgement
Author Contributions
Conflicts of Interest
Nomenclature
References
- Thayaparan, T.; Lampropoudos, G.; Wong, S.K.; Riseborough, E. Application of adaptive joint time-frequency algorithm for focusing distorted ISAR images from simulated and measured radar data. IEE Proc. Radar Sonar Navig. 2003, 150, 213–220. [Google Scholar] [CrossRef]
- Li, J.F.; Ling, H.; Chen, V.C. An algorithm to detect the presence of 3D target motion from ISAR data. Multidimension. Syst. Signal Process. 2003, 14, 223–240. [Google Scholar] [CrossRef]
- Barbarossa, S.; Scaglione, A. Autofocusing of SAR images based on the product high-order ambiguity function. IEEE Proc. Radar Sonar Navig. 1998, 145, 269–273. [Google Scholar] [CrossRef]
- Liu, Z.S.; Wu, R.B.; Li, J. Complex ISAR imaging of maneuvering targets via the Capon estimator. IEEE Trans. Signal Process. 1999, 47, 1262–1271. [Google Scholar]
- Trintinalia, L.C.; Ling, H. Joint time-frequency ISAR using adaptive processing. IEEE Trans. Antennas Propag. 1997, 45, 221–227. [Google Scholar] [CrossRef]
- Wang, Y.X.; Ling, H.; Chen, V.C. ISAR motion compensation via adaptive joint time-frequency technique. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 670–677. [Google Scholar] [CrossRef]
- Zheng, J.B.; Su, T.; Zhu, W.T.; Liu, Q.H. ISAR imaging of targets with complex motions based on the Keystone time-chirp rate distribution. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1275–1279. [Google Scholar] [CrossRef]
- Zheng, J.B.; Su, T.; Zhang, L.; Zhu, W.T.; Liu, Q.H. ISAR imaging of targets with complex motion based on the chirp rate-quadratic chirp rate distribution. IEEE Geosci. Remote Sens. 2014, 52, 7276–7289. [Google Scholar] [CrossRef]
- Prickect, M.J.; Chen, C.C. Principle of inverse synthetic aperture radar (ISAR) imaging. Electron. Aerosp. Syst. Conf. 1980, 1, 340–345. [Google Scholar]
- Martorella, M.; Giusti, E.; Demi, L.; Zhou, Z.; Berizzi, F.; Bates, B. Target recongnition by means of polarimetric ISAR images. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 225–239. [Google Scholar] [CrossRef]
- Martorella, M.; Pastina, D.; Berizzi, F.; Lombardo, P. Spaceborne radar imaging of maritime moving targets with the Cosmo-SkyMed SAR system. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 2797–2810. [Google Scholar] [CrossRef]
- Qiu, W.; Martorella, M.; Zhou, J.X.; Zhao, H.Z.; Fu, Q. Three-dimensional inverse synthetic aperture radar imaging based on compressive sensing. IEE Proc. Radar Sonar Navig. 2015, 9, 411–420. [Google Scholar] [CrossRef]
- Liu, L.; Zhou, F.; Tao, M.L.; Zhao, B.; Zhang, Z.J. Cross-range scaling method of inverse synthetic aperture radar image based on discrete polynomial-phase transform. IEE Proc. Radar Sonar Navig. 2015, 9, 333–341. [Google Scholar] [CrossRef]
- Li, G.; Zhang, H.; Wang, X.Q.; Xia, X.G. ISAR 2-D imaging of uniformly rotating targets via matching pursuit. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 1838–1846. [Google Scholar] [CrossRef]
- Lanterman, A.D.; Munson, D.C.; Wu, Y. Wide-angle radar imaging using time frequency distributions. IEE Proc. Radar Sonar Navig. 2003, 150, 203–211. [Google Scholar] [CrossRef]
- Bai, X.; Tao, R.; Wang, Z.J.; Wang, Y. ISAR imaging of a ship target based on parameter estimation of multicomponent quadratic frequency-modulated signals. IEEE Geosci. Remote Sens. 2014, 52, 1418–1429. [Google Scholar] [CrossRef]
- Pastina, D.; Bucciarelli, M.; Lombardo, P. Multistatic and MIMO distributed ISAR for enhanced cross-range resolution of rotating targets. IEEE Geosci. Remote Sens. 2010, 48, 3300–3317. [Google Scholar] [CrossRef]
- Walker, J.L. Range-Doppler imaging of rotating objects. IEEE Trans. Aerosp. Electron. Syst. 1980, 16, 23–52. [Google Scholar] [CrossRef]
- Liu, Y.T. Radar Imaging Technique; Harbin Institute of Technology Press: Heilongjiang, China, 1999; pp. 284–295. [Google Scholar]
- Wang, J.F.; Liu, X.Z. Improved global range alignment for ISAR. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1070–1075. [Google Scholar] [CrossRef]
- Zhu, D.Y.; Wang, L.; Yu, Y.S.; Tao, Q.N.; Zhu, Z.D. Robust ISAR range alignment via minimizing the entropy of the average range profile. IEEE Geosci. Remote Sens. Lett. 2009, 6, 204–208. [Google Scholar]
- Berizzi, F.; Mese, E.D.; Diani, M.; Martorella, M. High-resolution ISAR imaging of maneuvering targets by means of the range instantaneous Doppler technique: Modeling and performance analysis. IEEE Trans. Image Process. 2001, 10, 1880–1890. [Google Scholar] [CrossRef] [PubMed]
- Bao, Z.; Wang, G.Y.; Luo, L. Inverse synthetic aperture radar imaging of maneuvering targets. Opt. Eng. 1998, 37, 1582–1588. [Google Scholar] [CrossRef]
- Xia, X.G.; Wang, G.Y.; Chen, V.C. Quantitative SNR analysis for ISAR imaging using joint time-frequency analysis-Short Time Fourier Transform. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 649–659. [Google Scholar]
- Wu, Y.; Munson, D.C. Wide-angle ISAR passive imaging using smoothed pseudo Wigner-Ville distribution. In Proceedings of the 2001 IEEE Radar Conference, Atlanta, GA, USA, 1–3 May 2001; pp. 363–368.
- Wang, Y.; Jiang, Y.C. ISAR imaging of maneuvering target based on the L-Class of fourth order complex-Lag PWVD. IEEE Geosci. Remote Sens. 2010, 48, 1518–1527. [Google Scholar] [CrossRef]
- Chen, V.C.; Qian, S. Joint time-frequency transform for radar range-Doppler imaging. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 486–499. [Google Scholar] [CrossRef]
- Wang, G.Y.; Bao, Z.; Sun, X.B. Inverse synthetic aperture radar imaging of non-uniformly rotating targets. Opt. Eng. 1996, 35, 3007–3011. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, Y.C. Inverse synthetic aperture radar imaging of three-dimensional rotation target based on two-order match Fourier transform. IET Signal Process. 2012, 6, 159–169. [Google Scholar] [CrossRef]
- Sun, C.Y.; Bao, Z. Super-resolution algorithm for instantaneous ISAR imaging. Electron. Lett. 2000, 36, 253–255. [Google Scholar]
- Xing, M.D.; Bao, Z. Translational motion compensation and instantaneous imaging of ISAR maneuvering target. Multispectr. Hyperspectr. Image Acquis. Process. 2001. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, Y.C. ISAR imaging of a ship target using product high order matched-phase transform. IEEE Geosci. Remote Sens. Lett. 2009, 6, 658–661. [Google Scholar] [CrossRef]
- Wang, Y.; Kang, J.; Jiang, Y.C. ISAR imaging of maneuvering target based on the local polynomial Wigner distribution and integrated high order ambiguity function for cubic phase signal model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 2971–2991. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, Y.C. Inverse synthetic aperture radar imaging of maneuvering target based on the product generalized cubic phase function. IEEE Geosci. Remote Sens. Lett. 2011, 8, 958–962. [Google Scholar] [CrossRef]
- Peleg, S.; Friedlander, B. The discrete polynomial-phase transform. IEEE Trans. Signal Process. 1995, 43, 1901–1914. [Google Scholar] [CrossRef]
- Peleg, S.; Friedlander, B. Multicomponent signal analysis using the polynomial-phase transform. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 378–387. [Google Scholar] [CrossRef]
- Abatzoglou, T. Fast maximum likelihood joint estimation of frequency and frequency rate. IEEE Trans. Aerosp. Electron. Syst. 1986, 22, 708–715. [Google Scholar] [CrossRef]
- Barbarossa, S.; Scaglione, A.; Giannakis, G.B. Product high-order ambiguity function for multicomponent polynomial-phase signal modeling. IEEE Trans. Signal Process. 1998, 46, 691–708. [Google Scholar] [CrossRef]
- O’shea, P.; Wiltshire, R.A. A new class of multilinear functions for polynomial phase signal analysis. IEEE Trans. Signal Process. 2009, 57, 2096–2109. [Google Scholar] [CrossRef]
- Gough, P.T. A fast spectral estimation algorithm based on the FFT. IEEE Trans. Signal Process. 1994, 42, 1317–1322. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, Y. A novel algorithm for estimating the rotation angle in ISAR imaging. IEEE Geosci. Remote Sens. Lett. 2008, 5, 608–609. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, R.B.; Kang, J. Rotational parameters estimation for ISAR imaging of maneuvering target. In Proceedings of the 12th International Conference on Signal Processing, Hangzhou, China, 19–23 October 2014; pp. 1872–1875.
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Abdelkader, A.C.; Zhao, B.; Wang, J. ISAR Imaging of Maneuvering Targets Based on the Modified Discrete Polynomial-Phase Transform. Sensors 2015, 15, 22401-22418. https://doi.org/10.3390/s150922401
Wang Y, Abdelkader AC, Zhao B, Wang J. ISAR Imaging of Maneuvering Targets Based on the Modified Discrete Polynomial-Phase Transform. Sensors. 2015; 15(9):22401-22418. https://doi.org/10.3390/s150922401
Chicago/Turabian StyleWang, Yong, Ali Cherif Abdelkader, Bin Zhao, and Jinxiang Wang. 2015. "ISAR Imaging of Maneuvering Targets Based on the Modified Discrete Polynomial-Phase Transform" Sensors 15, no. 9: 22401-22418. https://doi.org/10.3390/s150922401