
Stochastic Resonance in an Underdamped System with Pinning Potential for Weak Signal Detection

Abstract
:1. Introduction
2. Underdamped Pinning Stochastic Resonance
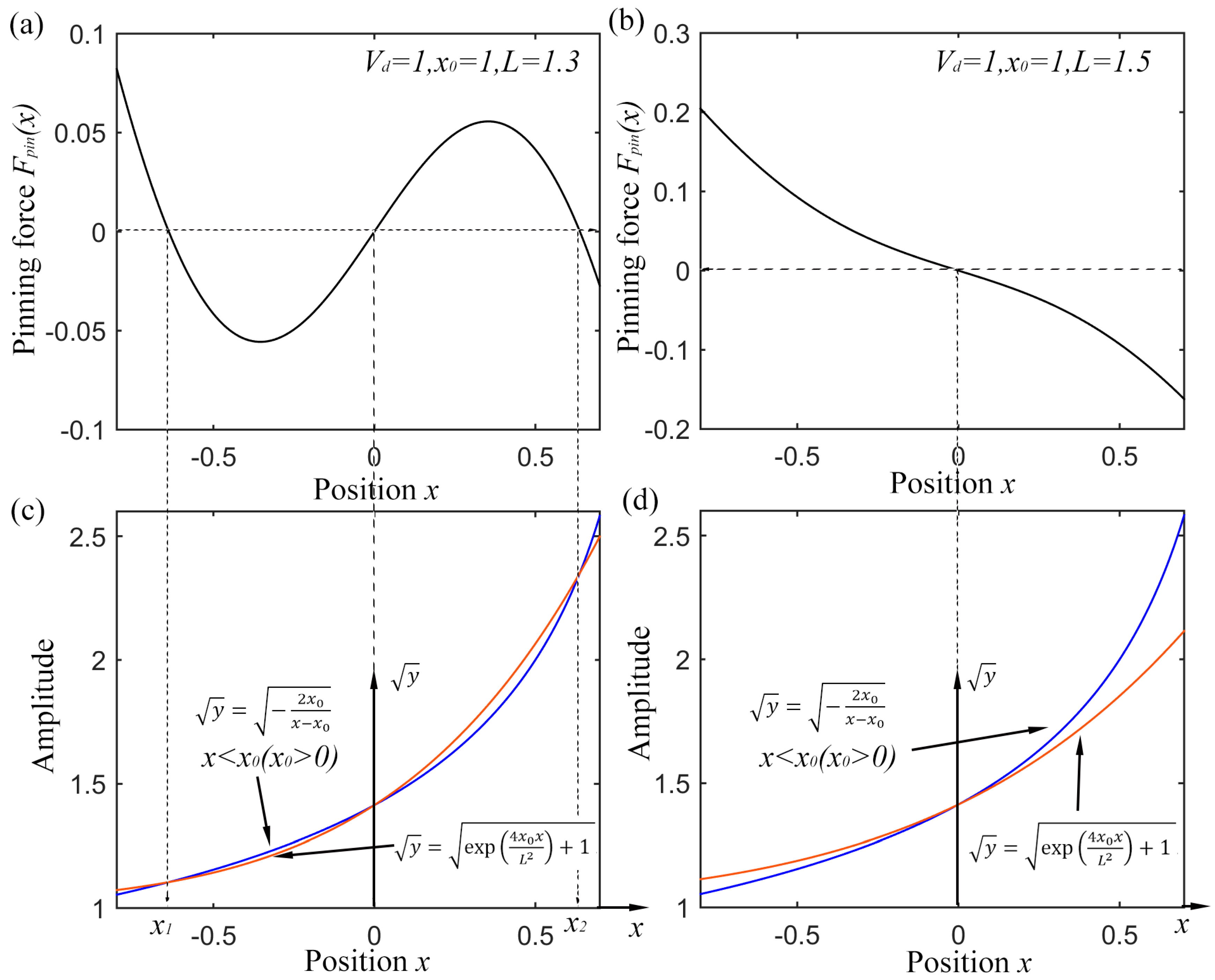
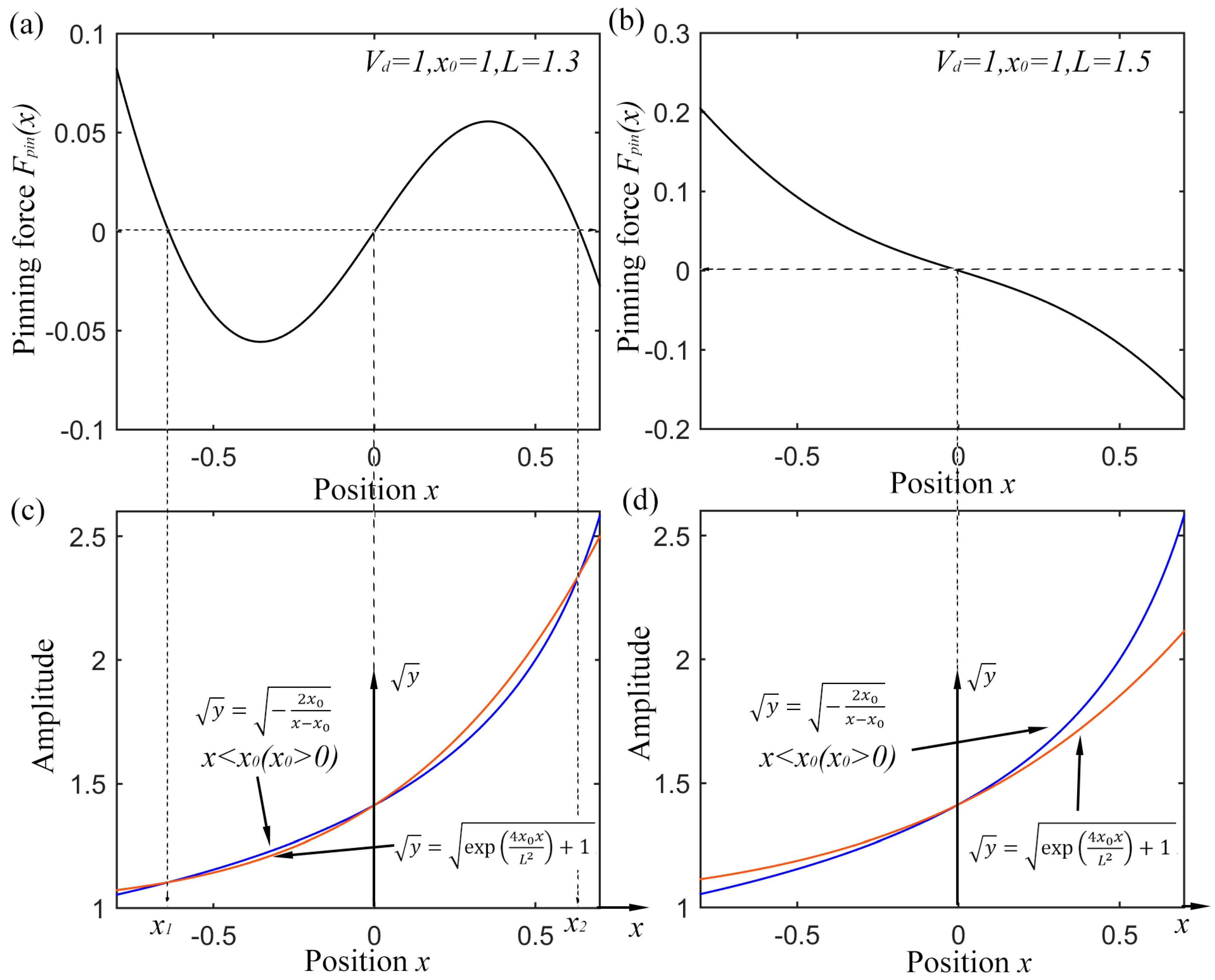
2.1. Pinning Potential Model in Ferromagnetic Strips
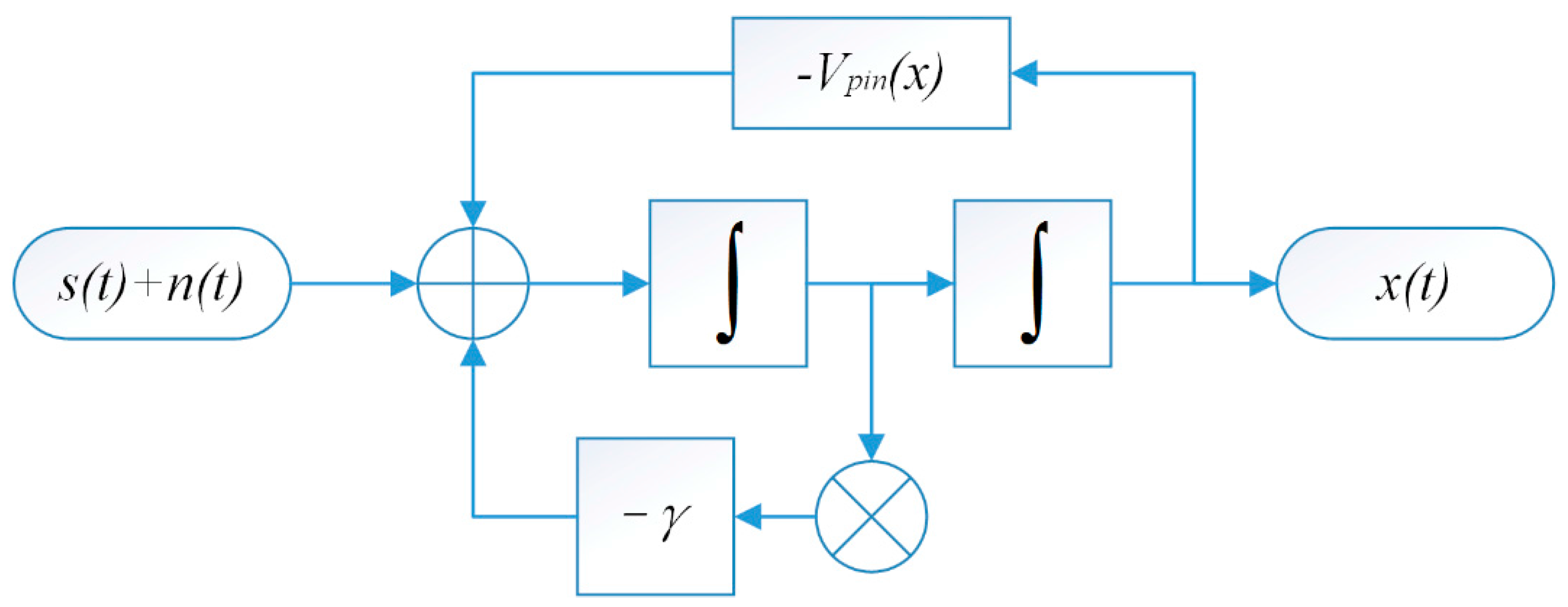
2.2. Underdamped Pinning SR and Numerical Solution

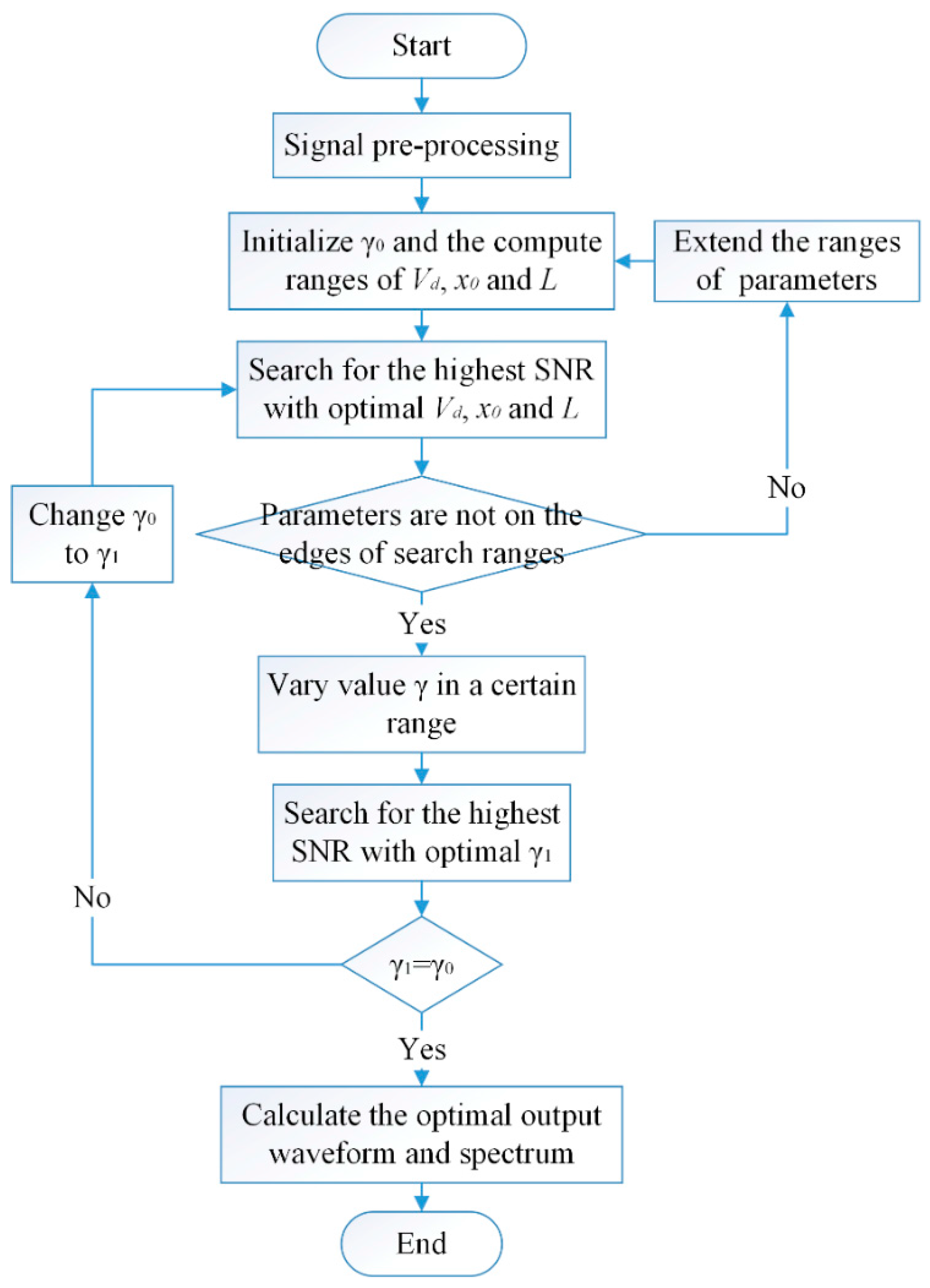
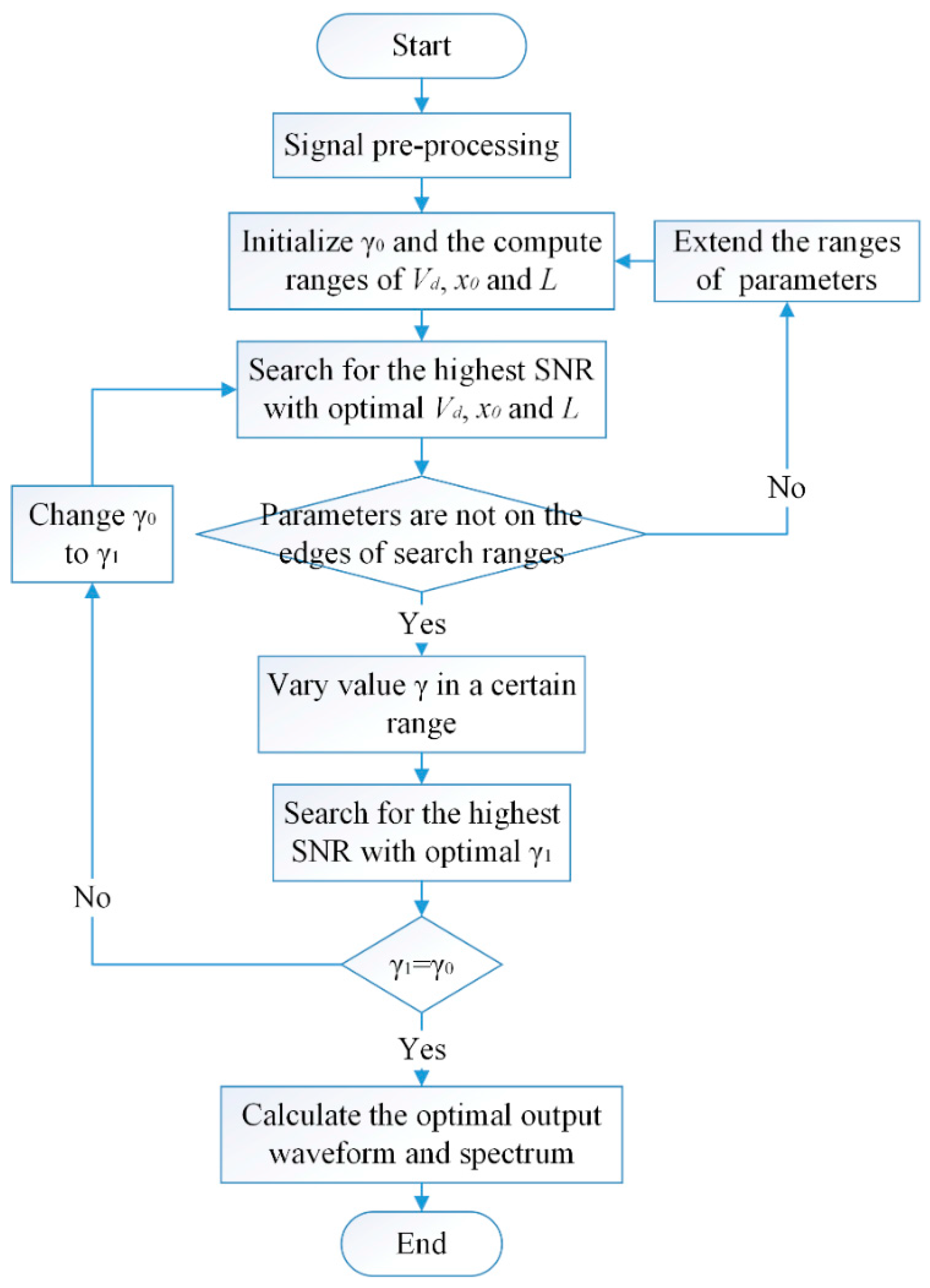
2.3. Weak Signal Detection Scheme
- (1)
- Signal pre-processing. The signal is pre-processed with techniques of filtering part of the noise that locates in the uncorrelated bandwidth, and extracting the driving frequency by calculating its envelope signal where the driving frequency is modulated to a high level.
- (2)
- Parameter initialization. Fix the damping factor of and initialize the calculating ranges of , and L.
- (3)
- Optimization of , and L. Firstly, calculate the power spectrum of the output waveform and obtain its SNR according to Equations (21) and (22). Then search for the maximal SNR over varying variables , and L, and obtain the optimal parameters combination corresponding to the peak value. Finally, check that whether the values have reached the edges of searching ranges. If so, go back to step 2 and extend the searching ranges. Otherwise, go to next step.
- (4)
- Optimization of. With the temporarily optimized parameters of , and L, change the value of in a reasonable range and calculate the output SNR with different . Search for the highest SNR and the corresponding . If , go on with the next step. If not, go back to step 2 by replacing with the new optimal .
- (5)
- Acquisition of optimal output. Obtain the optimal output waveform as the detected weak signal with the optimized parameters. The periodic signal is then detected successfully and noise is weakened apparently. Calculate its power spectrum for the identification of the driving frequency. By these operations, the feature in weak periodic signal can be recognized clearly, which is also beneficial to the rotating machine fault diagnosis.
3. System Performance of UPSR
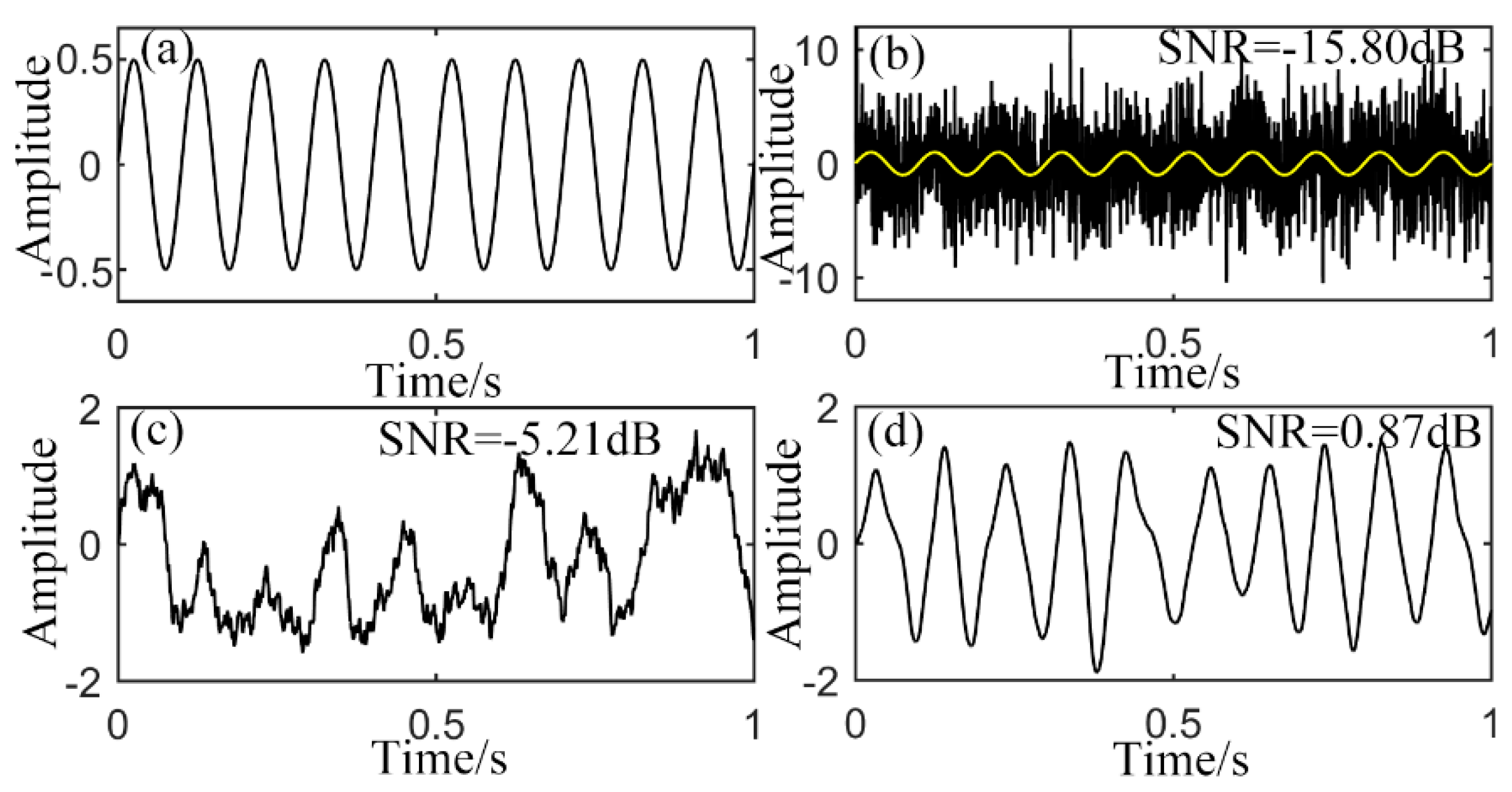
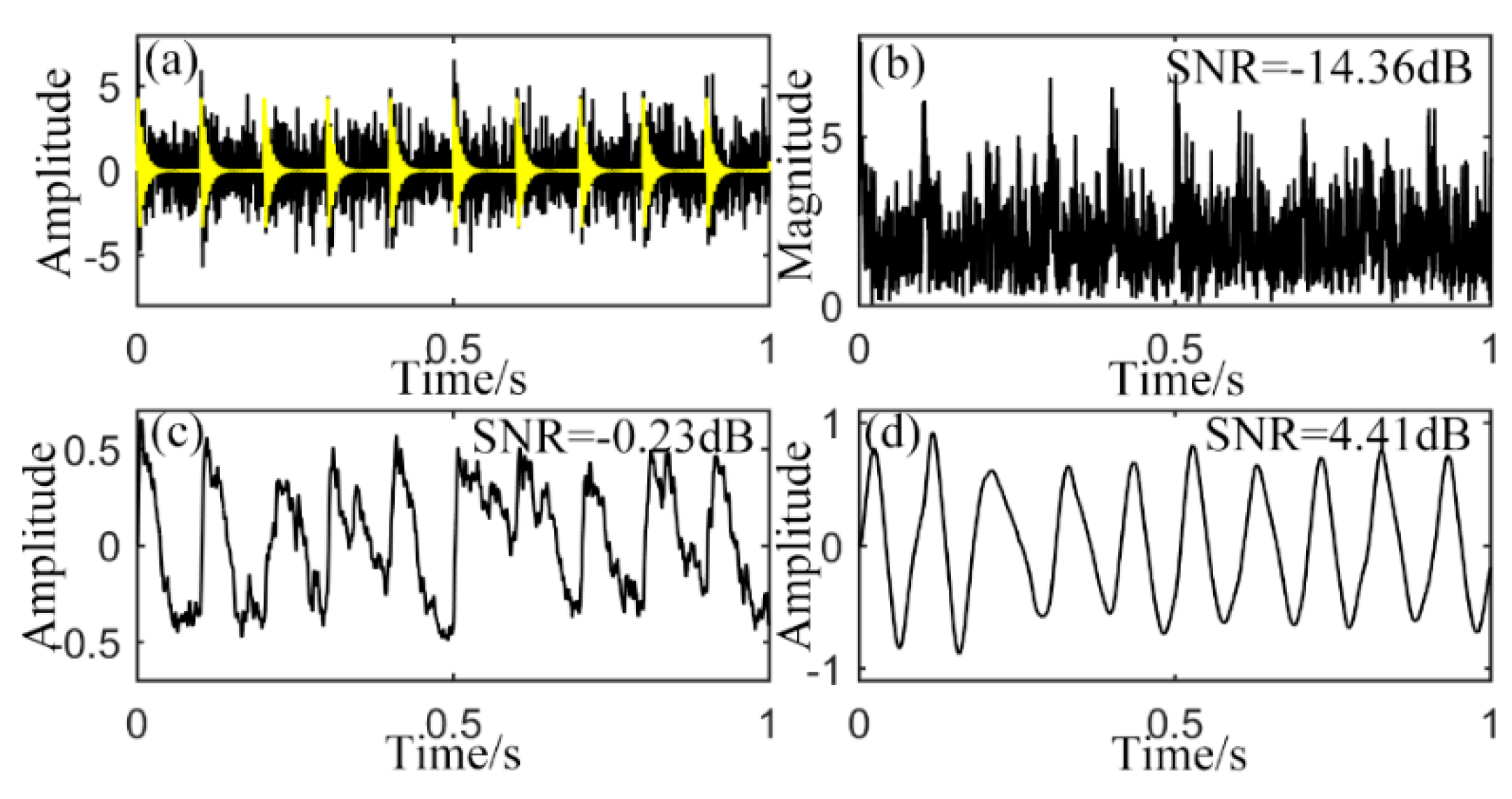
3.1. Output of UPSR
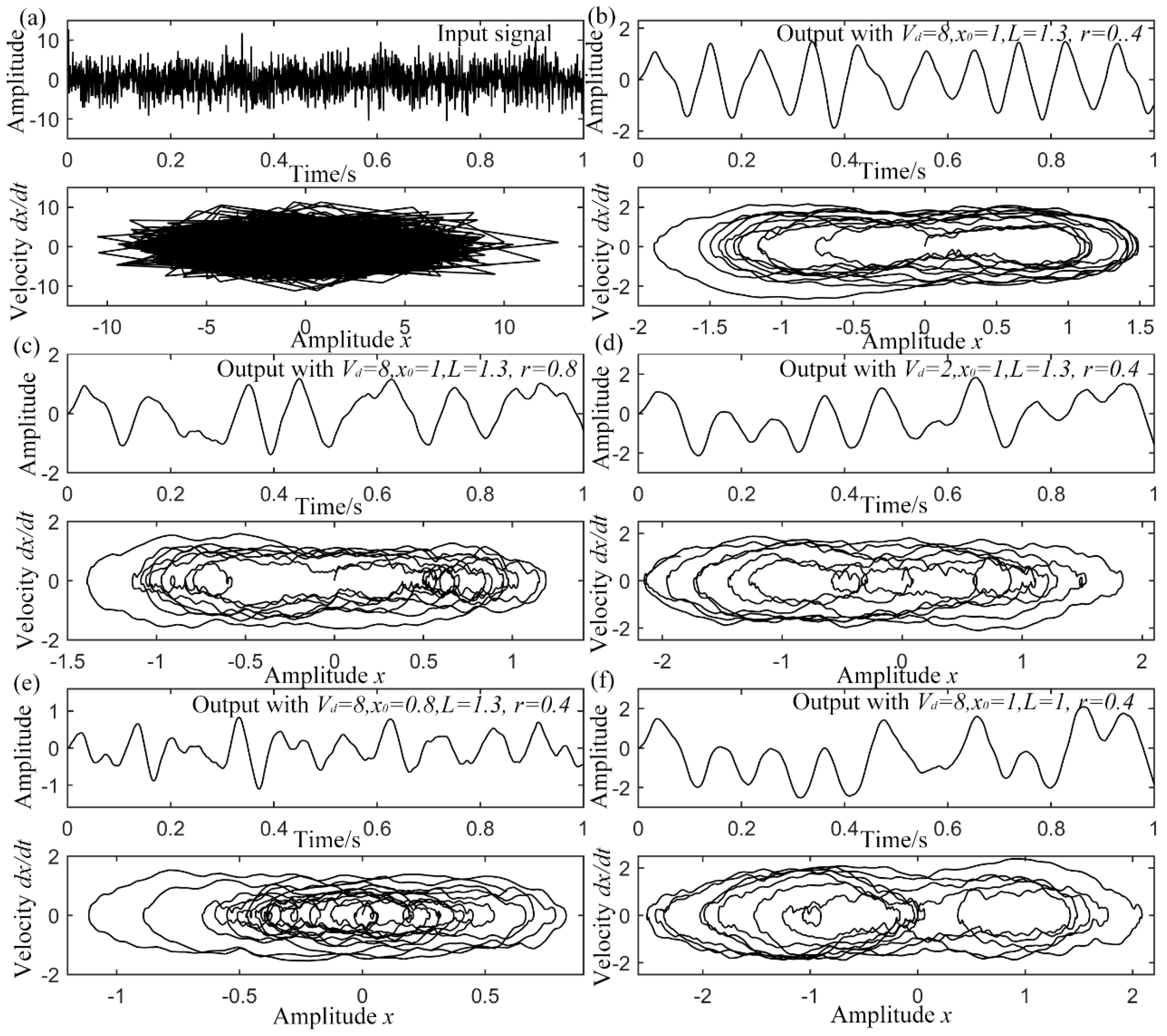
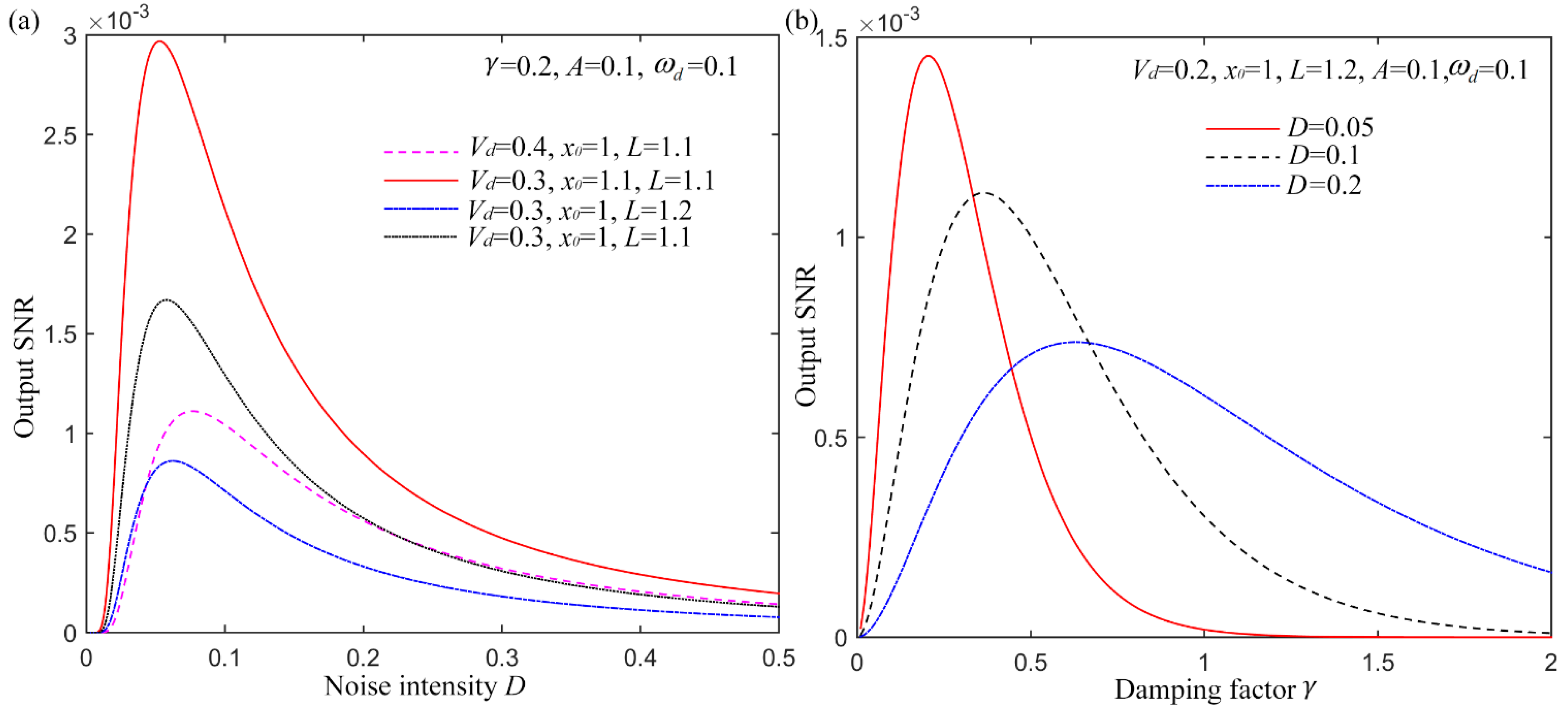
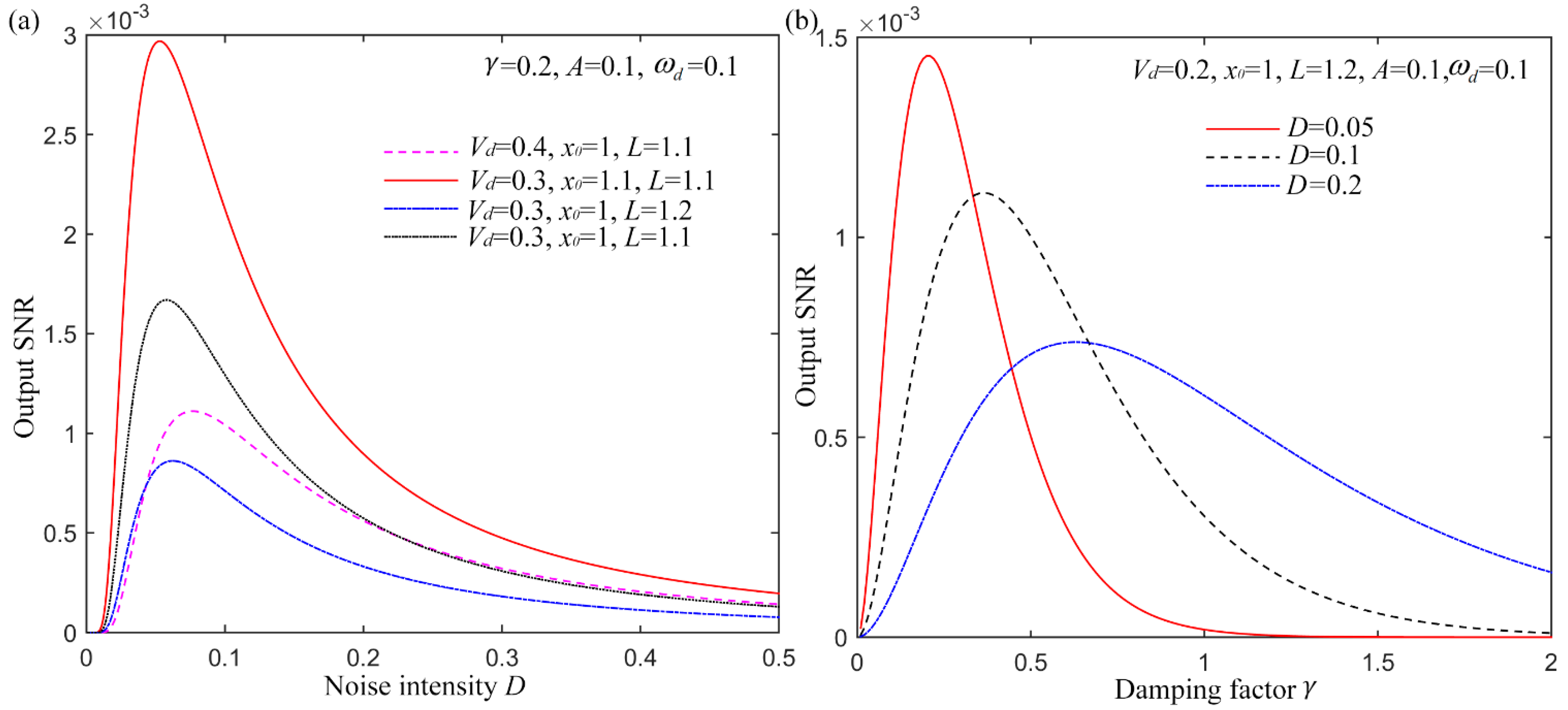
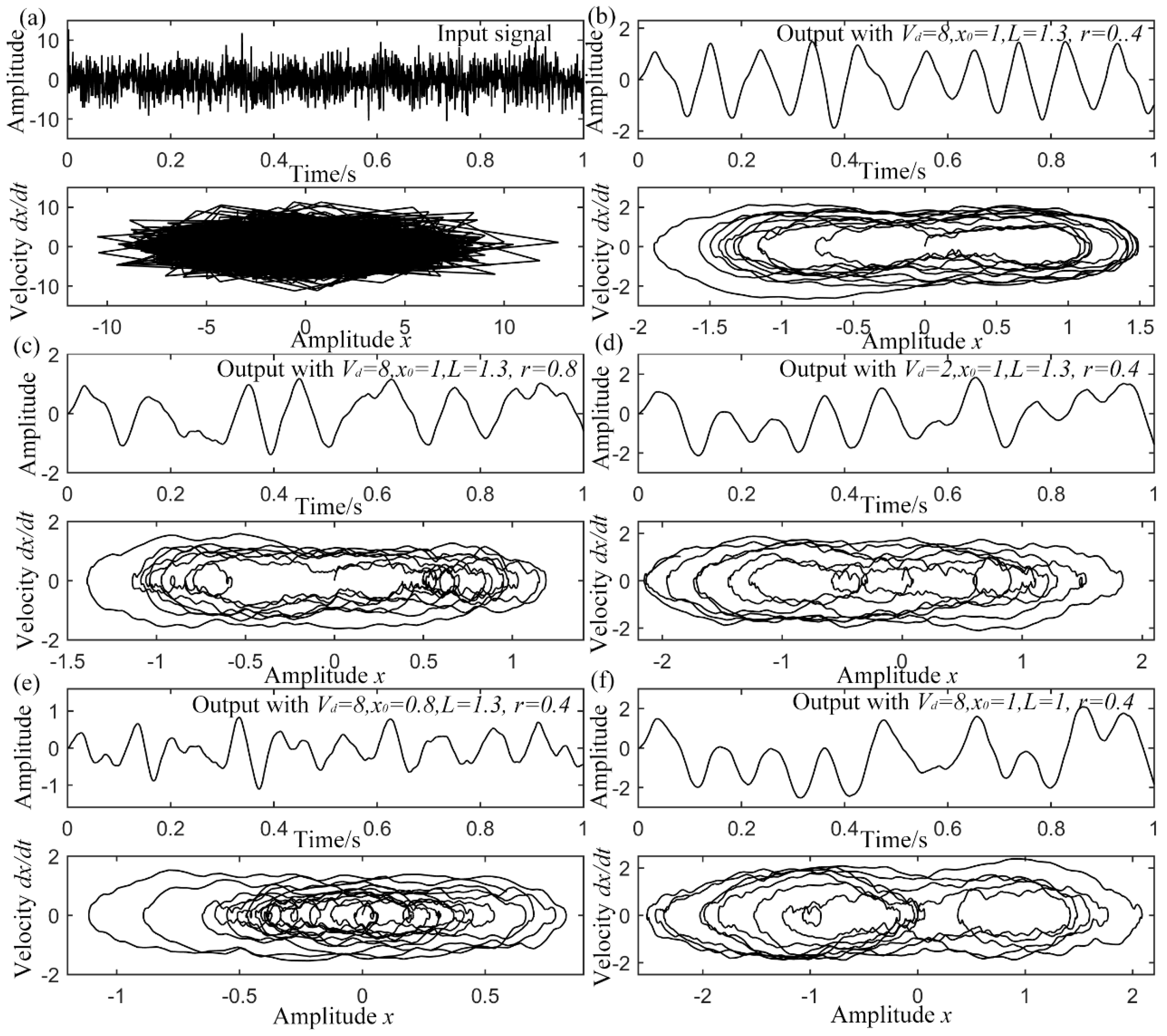
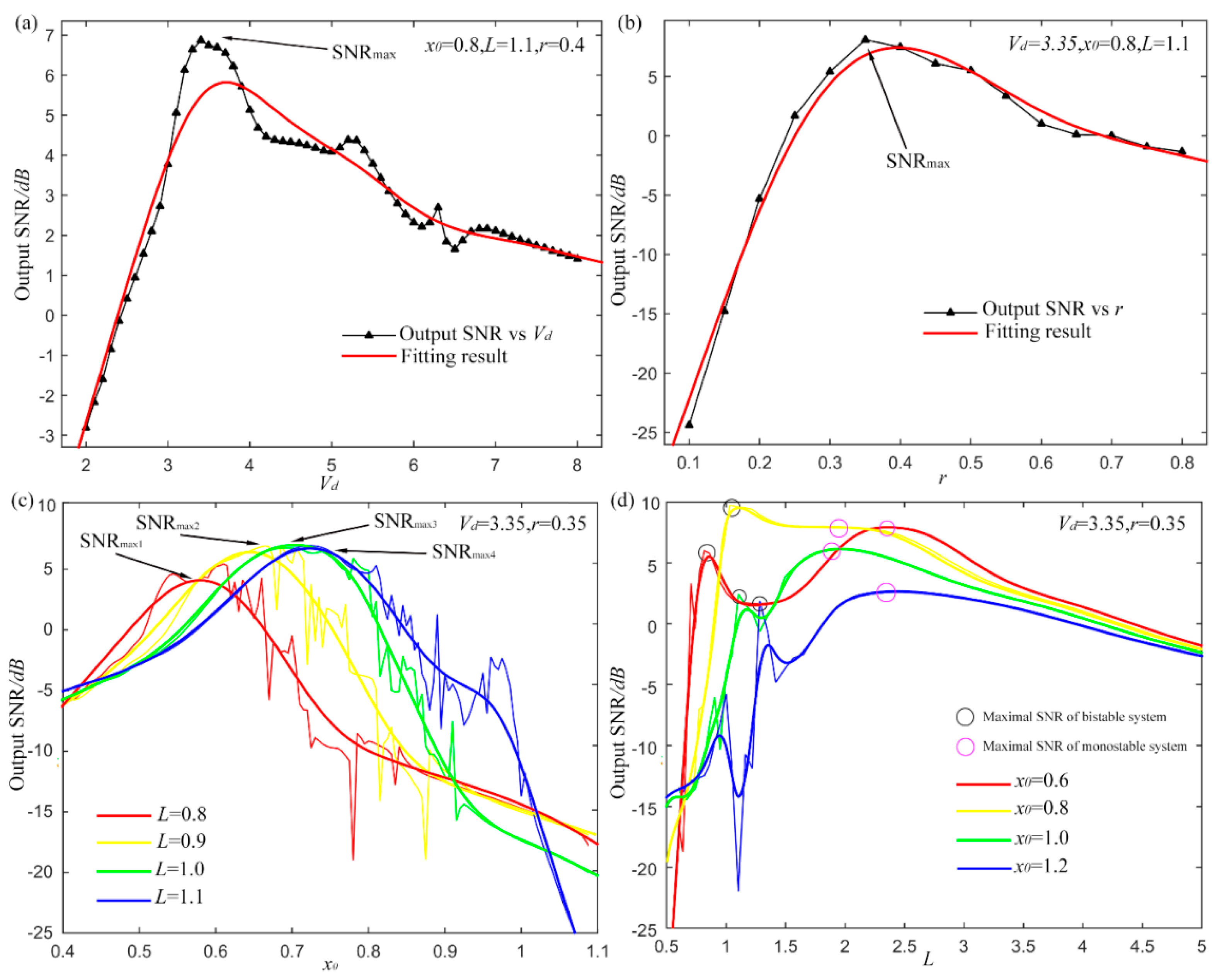
3.2. Influence of System Parameters

3.3. Performance with Different Input Signals
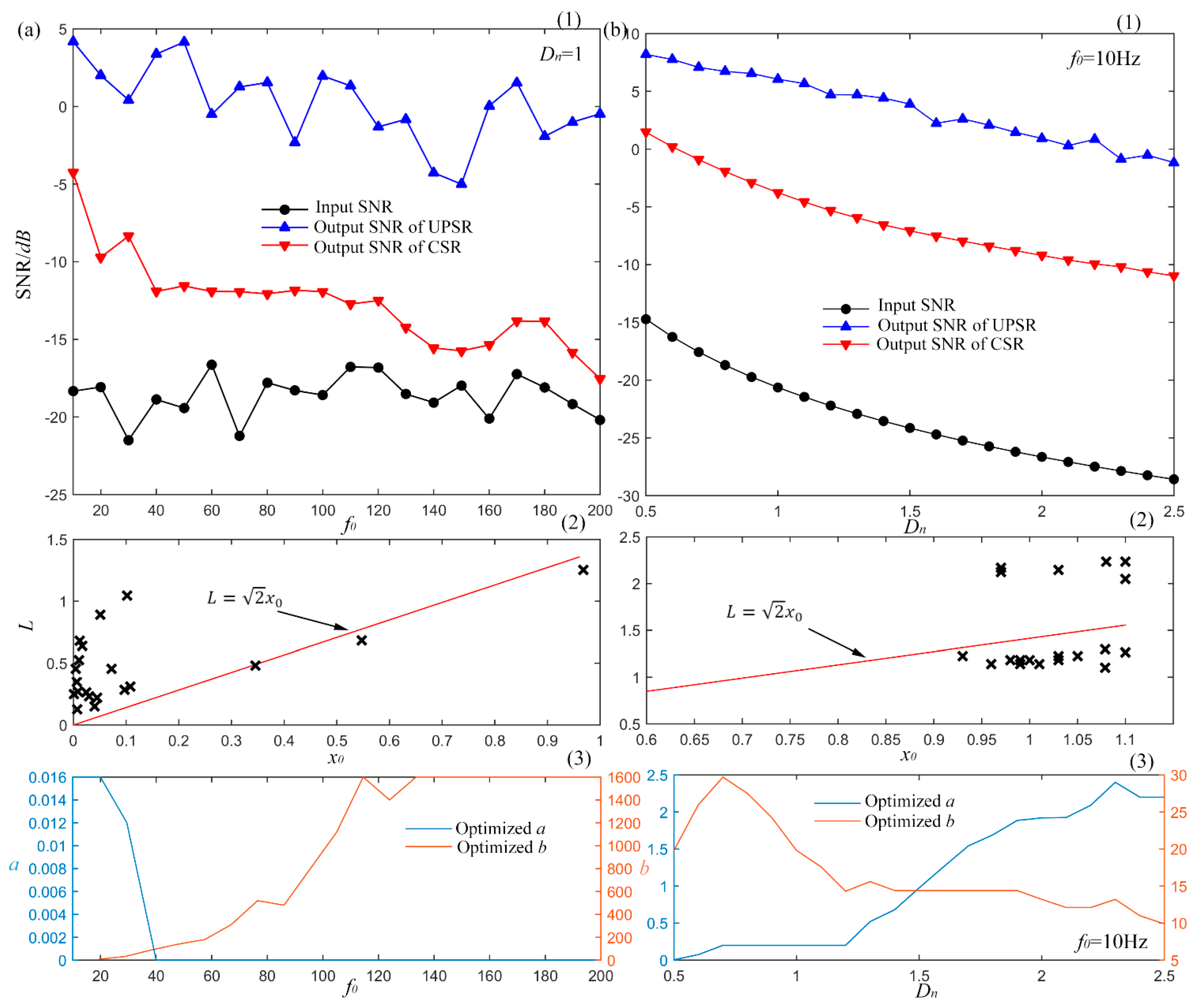
3.3.1. Performance vs. Driving Frequency

3.3.2. Performance vs. Input Noise Intensity
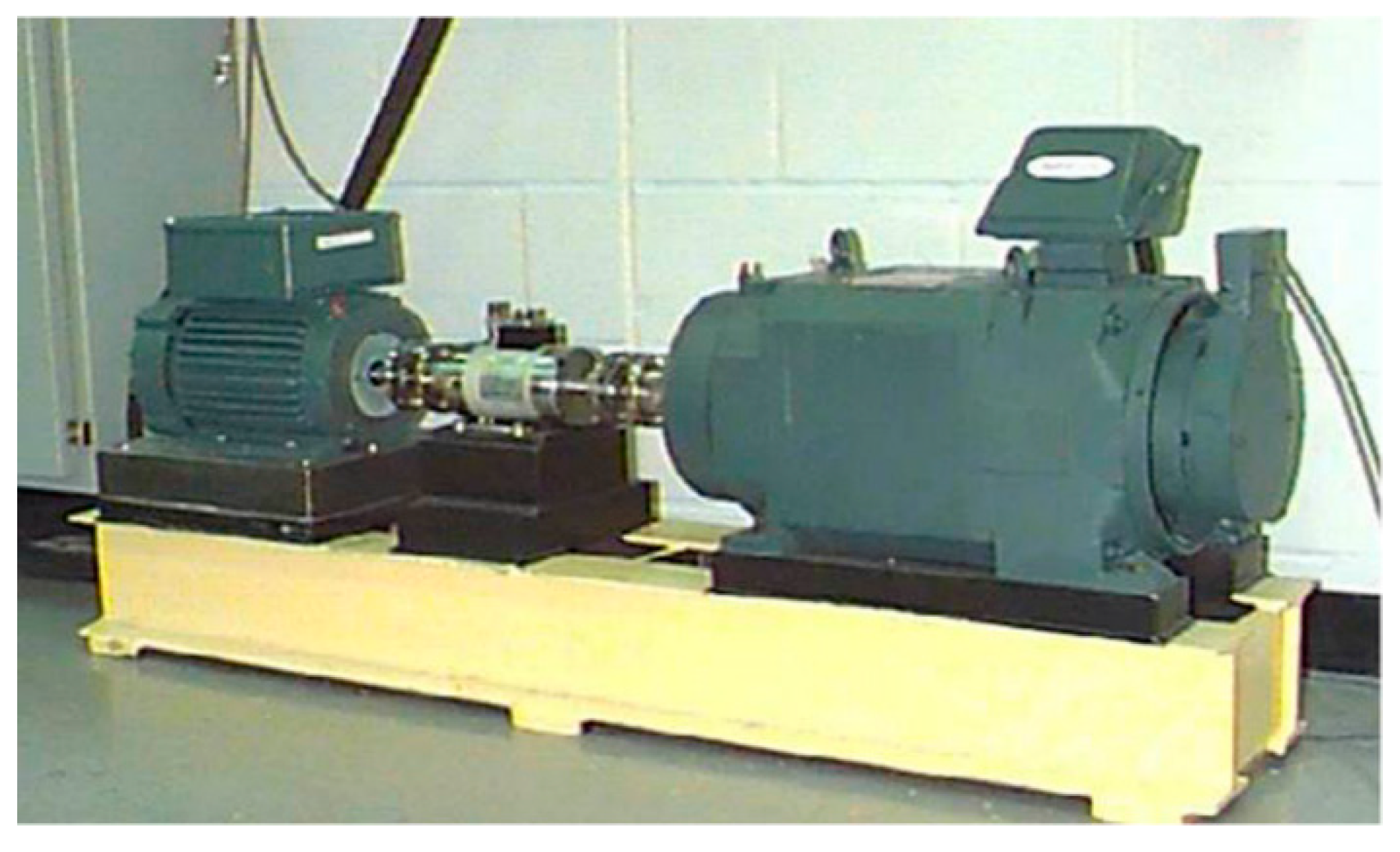
4. Engineering Application


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inside Diameter (Inch) | Outside Diameter (Inch) | Pitch Diameter (Inch) | Ball Diameter (Inch) | Number of the Rollers |
|---|---|---|---|---|
| 0.9843 | 2.0472 | 1.537 | 0.3126 | 9 |
| Defect Type | Fault Size () | Rotating Speed (RPM) | Fault Frequencies (Hz) |
|---|---|---|---|
| Outer-race defect | 1772 | 105.9 | |
| Inner-race defect | 1750 | 157.9 | |
| Rolling element defect | 1730 | 135.9 |
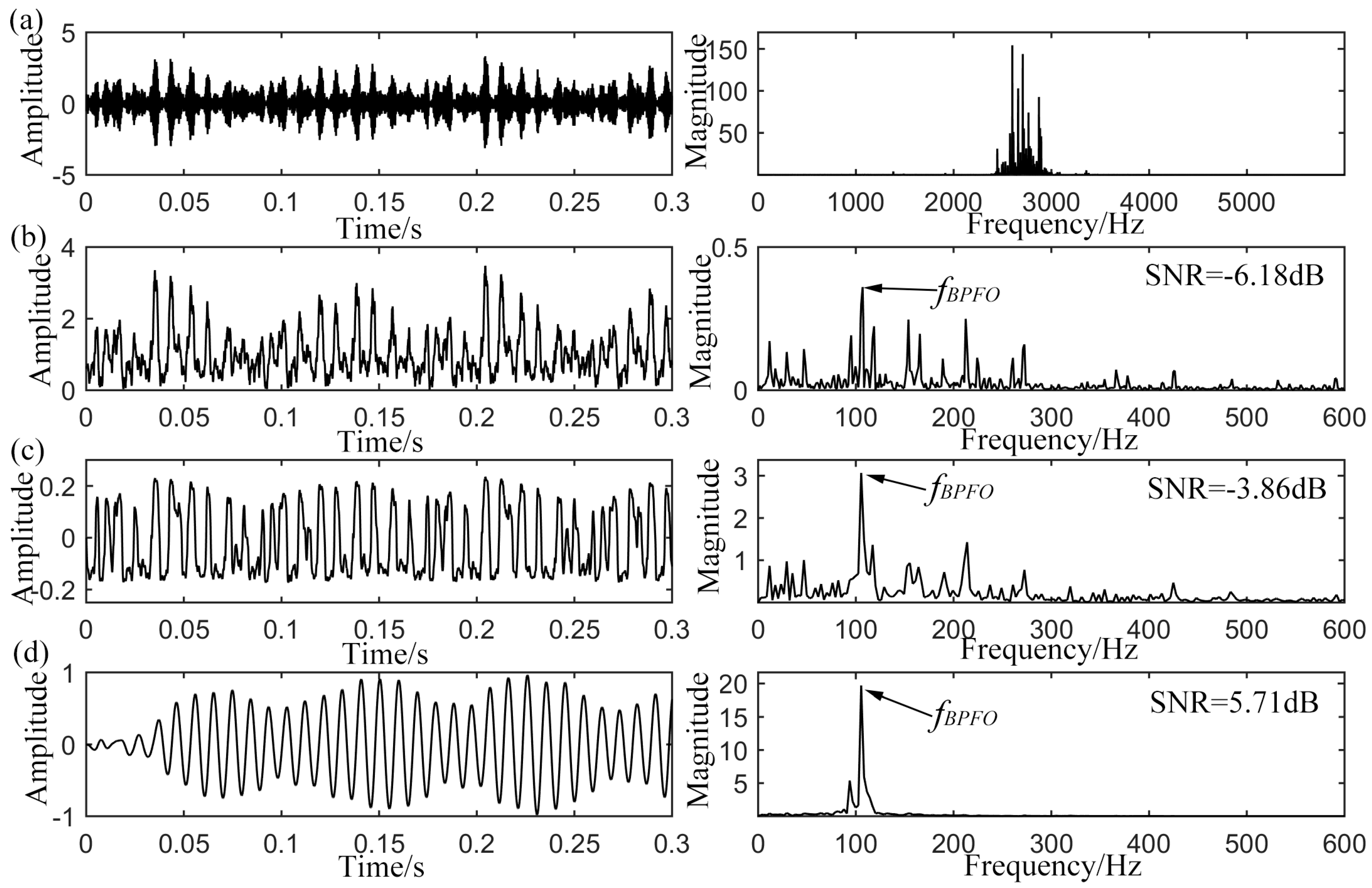
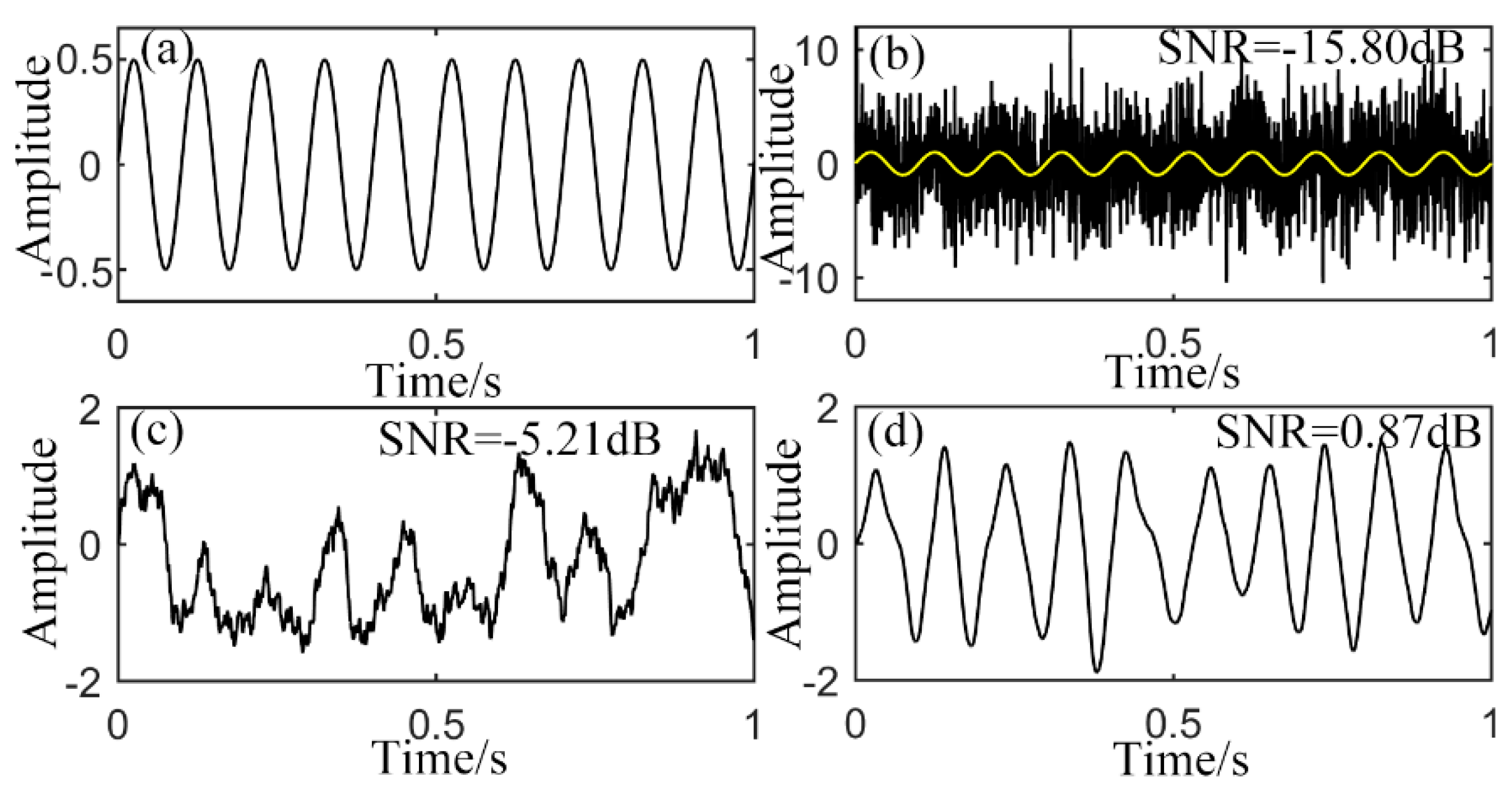
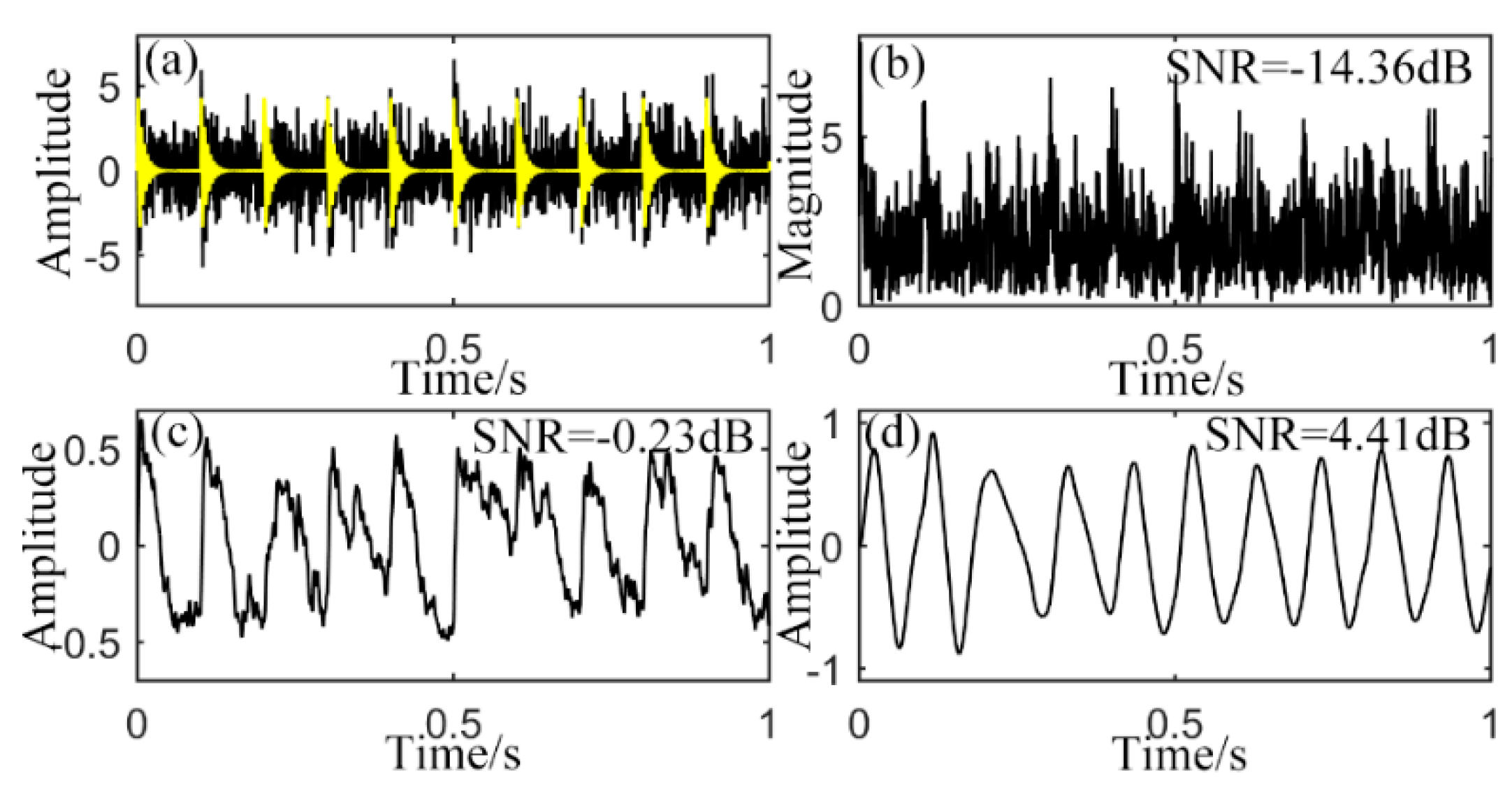
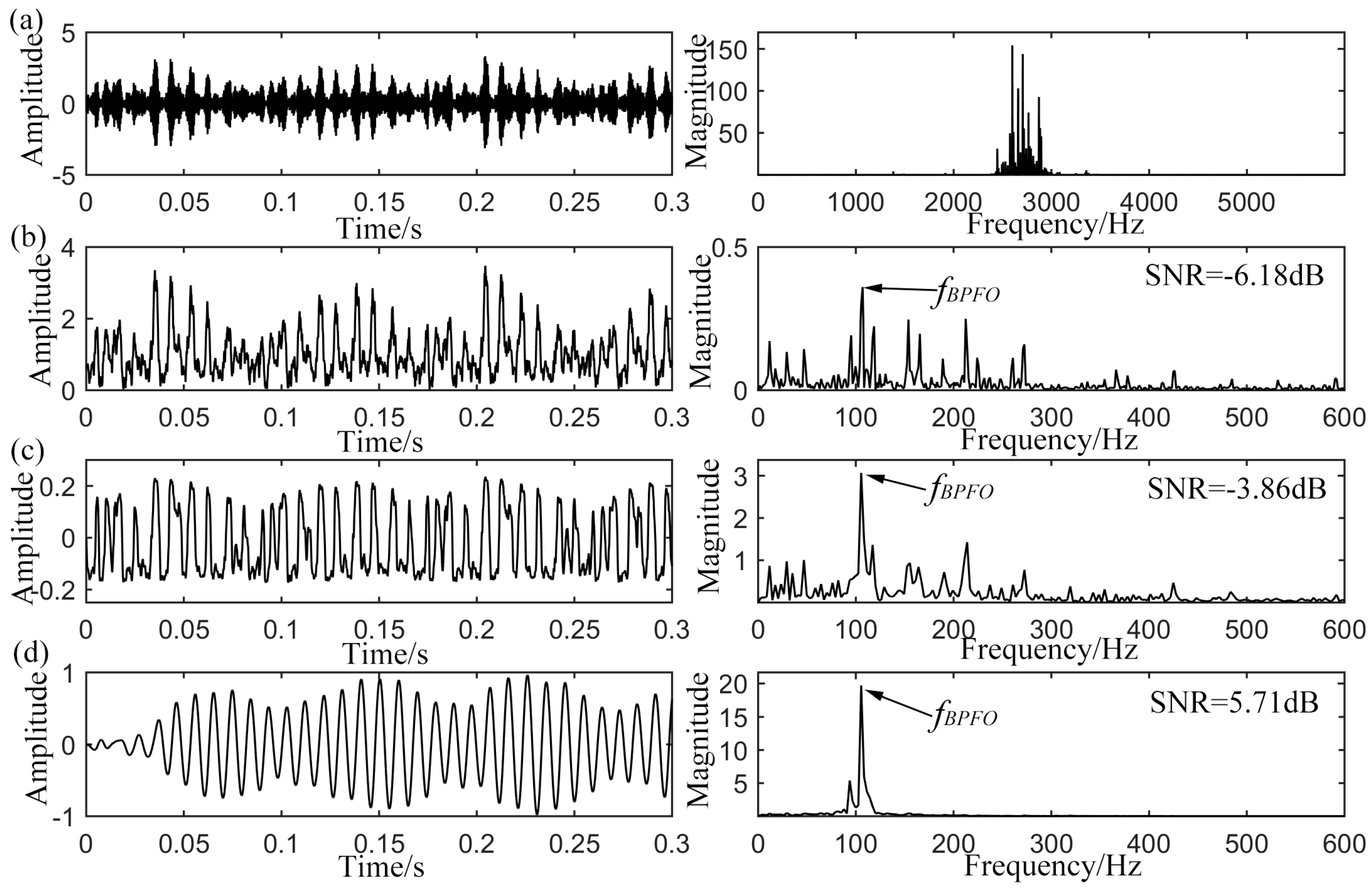
4.1. Outer-Race Defect Detection
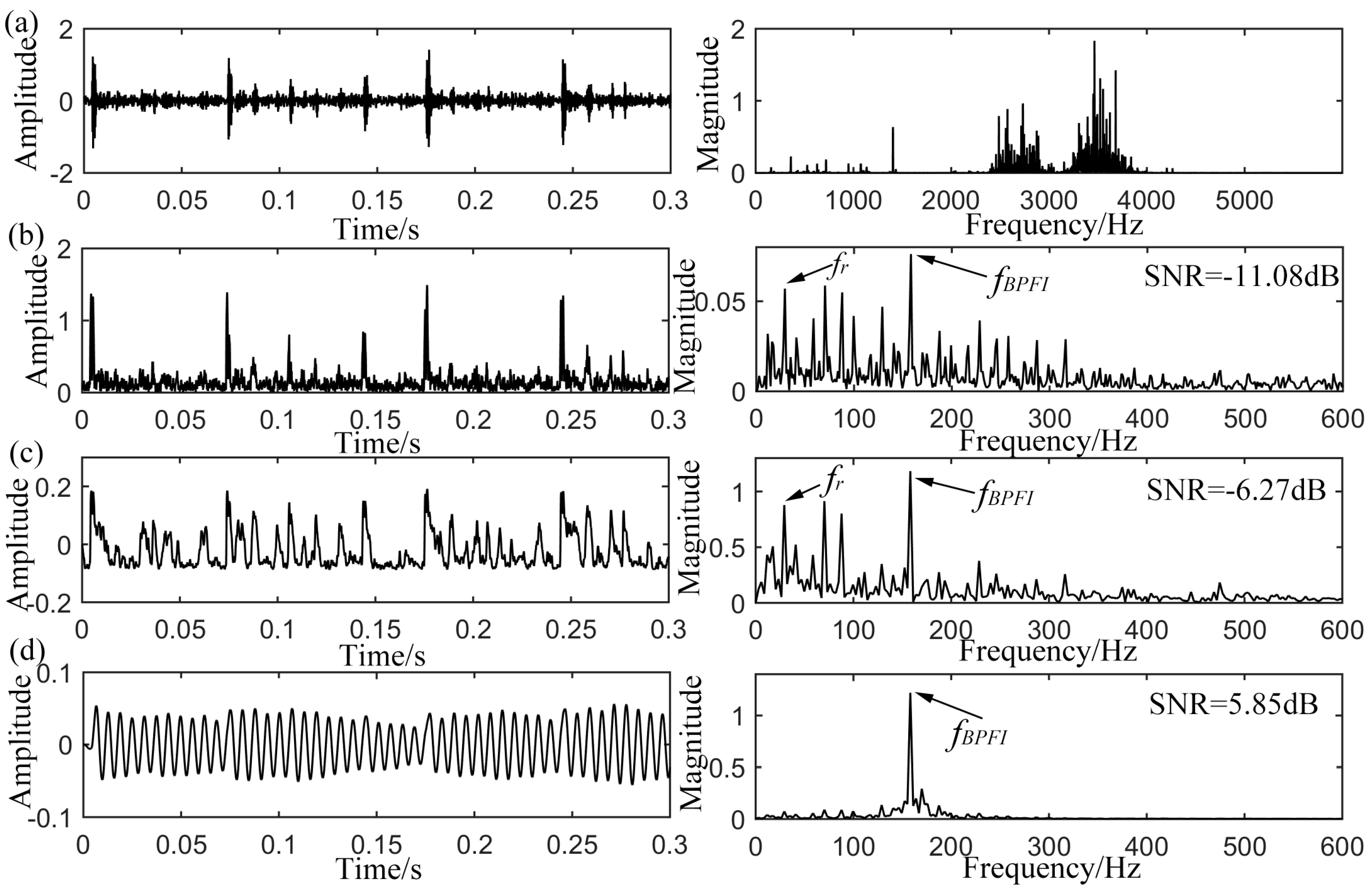
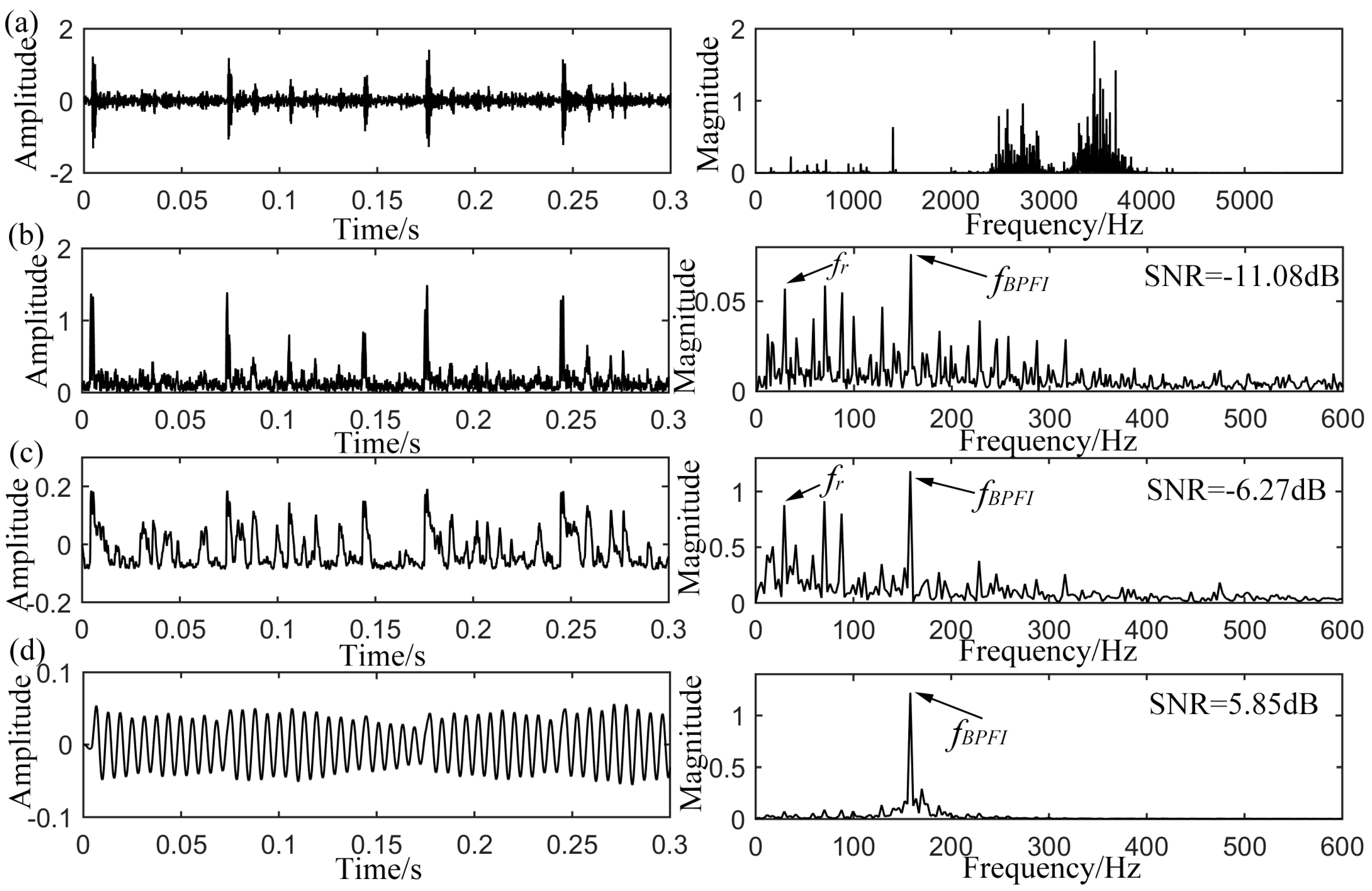
4.2. Inner-Race Defect Detection
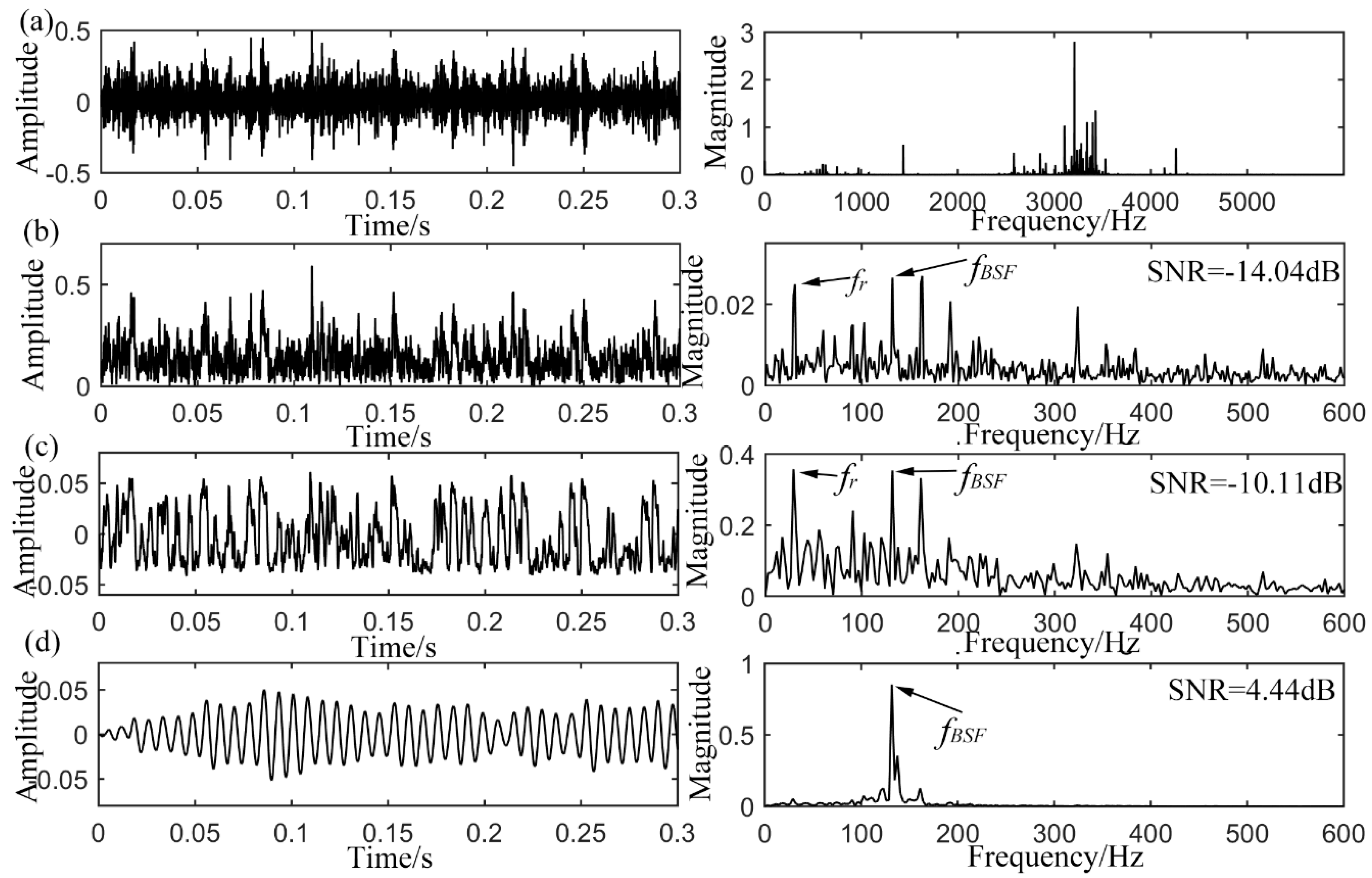
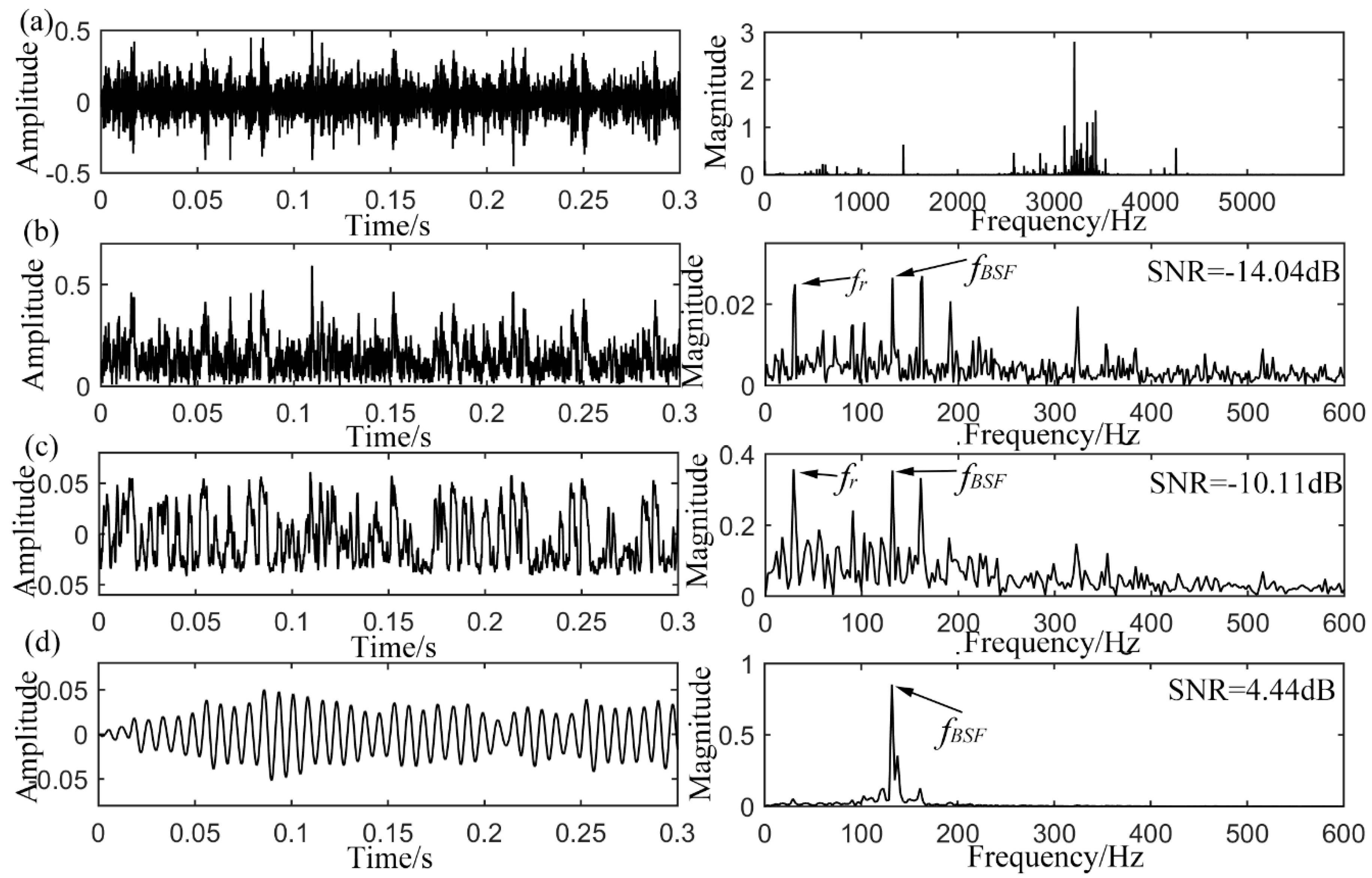
4.3. Rolling Element Defect Detection
4.4. Discussions
- (a)
- The damping factor involvement provides a secondary filtering effect for the SR system. The UPSR can perform as an underdamped or approximate over-damped system by tuning the damping factor value. It ensures the system to provide higher output SNR with less interference components and better universality to different kinds of input signals with different noise levels. Choosing a proper damping factor makes the underdamped SR perform better in enhancing weak signal due to the secondary band-pass filtering effect, which acts as a specific selective non-linear filter.
- (b)
- The simulation results of the system performance with different input signals indicate the better anti-noise ability and frequency response in detection of signals with strong background noise. Transferring the noise energy to the target frequency makes it beneficial to detect the weak signals that are involved in the noise bandwidth. All the system parameters can be optimized more accurately and easily for the best combination and the highest output SNR due to its parameters sensibility. The three features (barrier height, equilibrium position and wall steepness) of the potential well play dominant roles on the performance of SR. For the CSR model, they are determined by only two parameters, a and b, which indicates that the parameters are not independent or one feature sensitive, but for the UPSR system, the different parameters possess definite duties. Thus, the optimal potential model to enhance the periodic weak signal can be accurately designed. When searching all the parameters referring to the global search method, the efficiency of the UPSR system with three parameters is obvious lower than that of ordinary cubic potential model, which has only two dimensions, so the efficiency of the optimization procedure for system parameters may be further improved by referring to the progressive searching algorithm (like genetic algorithm) in the future to bring down the consumption of the exhaustive search.
- (c)
- Traditional bi-stable SR theory is under the assumption that the frequency of the periodic signal is smaller than one, so the rescaling ratio is utilized here to lower the equivalent driving frequency and enlarge the calculating step h in Equation (21). For the CSR system, the calculating step is strictly confined, which affects the output severely, because the CSR system always acts as a bi-stable model and jumping over the barrier for the particle is essential, but for systems with relatively small h, the energy in one period is not enough to overcome the barrier. On the other hand, too large an h value has the consequence of too much high frequency noise. However the proposed UPSR system weakens the restriction of the calculation step. Whenever the signal contains high or low driving frequency or background noise, the system can optionally transform between two states. A mono-stable one comes up for the signals with relatively large driving frequency just as the three cases in engineering application. In other words, the model can be adjusted to adapt to different scales of calculating step. This feature makes the system more adaptive and robust to various kinds of input signals and less dependent on the small size of signals.
- (d)
- The output SNR in Equation (22) is employed here as the detection and optimization criterion. However, it can be improved ultimately by optimizing the decision like replacing the SNR by mutual information, Fisher information, correlation or other discrimination indexes [37]. Much attention is also paid to the different decisions. Sequential detection performance via SR was evaluated in terms of the Neyman-Pearson and Bayesian criteria [38]. The pertinent receiver operating characteristics were compared with those of the known statistically optimum detector using extensive Monte Carlo simulations [39]. In [40], it was mentioned that the naive sample mean detector is outperformed, in terms of error probability, by the optimal likelihood ratio test. Besides, other detection strategies like Bayesian, minimum error-probability, Neyman-Pearson, and minimax detectors were all investigated in [41]. Appreciably, most of the cases refer to the framework of statistical detection theory. In our study at the current stage, independent detection and diagnosis is considered, which means the diagnosis work at the current stage of our work is made independently, but not statistically. While the statistical analysis and diagnosis for rotating machine is preferred for more accurate results, averting the limit of optimal Neyman-Pearson testing technique. We also would like to avoid the problem of counterintuitive “improvements by noise” by improving the detection strategy employing the novel and effective criteria in the future.
- (e)
- Although it displays the enumerated merits, the system still needs to be further studied to develop its physical theory. In spite of the weakened impact of the calculation step, its role to the final optimization results still needs to be explored. Besides, inconformity of output amplitude is found in our study, especially when the system is mono-stable. Investigations on the formation mechanism and strategy to conquer this matter are also needed. Besides, the application of UPSR system differs from the theoretical SR whose optimal condition is achieved by tuning the input noise intensity. The existence of a better detection when noise increases should not be underestimated, so we would like to investigate novel noise tuning methods to apply the new SR system in signal de-noising and weak signal detection in the future.
| Defect Type | Envelope Signal SNR (dB) | Output SNR of CSR (dB) | Output SNR of UPSR (dB) |
|---|---|---|---|
| Outer-race defect | −6.18 | −3.86 | 5.71 |
| Inner-race defect | −11.08 | −6.27 | 5.85 |
| Rolling element defect | −14.04 | −10.11 | 4.44 |
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Gammaitoni, L.; Hanggi, P.; Jung, P.; Marchesoni, F. Stochastic resonance. Rev. Mod. Phys. 1998, 70, 223–287. [Google Scholar] [CrossRef]
- Benzi, R.; Sutera, A.; Vulpiani, A. The mechanism of stochastic resonance. J. Phys. A: Math. Gen. 1981, 14, 453–457. [Google Scholar] [CrossRef]
- Jung, P.; Hanggi, P. Amplification of small signals via stochastic resonance. Phys. Rev. A 1991, 44, 8032–8042. [Google Scholar] [CrossRef] [PubMed]
- Gammaitoni, L.; Martinelli, M.; Pardi, L.; Santucci, S. Observation of stochastic resonance in bistable electron-paramagnetic-resonance systems. Phys. Rev. Lett. 1991, 67, 1799–1802. [Google Scholar] [CrossRef] [PubMed]
- Gammaitoni, L.; Marchesoni, F.; Menichellasaetta, E.; Santucci, S. Stochastic resonance in bistable systems. Phys. Rev. Lett. 1989, 62, 349–352. [Google Scholar] [CrossRef] [PubMed]
- Chapeau-Blondeau, F. Stochastic resonance and optimal detection of pulse trains by threshold devices. Digit. Signal Process. 1999, 9, 162–177. [Google Scholar] [CrossRef]
- Leng, Y.G.; Wang, T.Y. Numerical research of twice sampling stochastic resonance for the detection of a weak signal submerged in a heavy noise. Acta Phys. Sin.-Chin. Ed. 2003, 52, 2432–2437. [Google Scholar]
- He, H.L.; Wang, T.Y.; Leng, Y.G.; Zhang, Y.; Li, Q. Study on non-linear filter characteristic and engineering application of cascaded bistable stochastic resonance system. Mech. Syst. Signal Process. 2007, 21, 2740–2749. [Google Scholar] [CrossRef]
- He, Q.B.; Wang, J. Effects of multiscale noise tuning on stochastic resonance for weak signal detection. Digit. Signal Process. 2012, 22, 614–621. [Google Scholar] [CrossRef]
- He, Q.B.; Wang, J.; Liu, Y.B.; Dai, D.Y.; Kong, F.R. Multiscale noise tuning of stochastic resonance for enhanced fault diagnosis in rotating machines. Mech. Syst. Signal. Process. 2012, 28, 443–457. [Google Scholar] [CrossRef]
- Qin, Y.; Tao, Y.; He, Y.; Tang, B. Adaptive bistable stochastic resonance and its application in mechanical fault feature extraction. J. Sound Vib. 2014, 333, 7386–7400. [Google Scholar] [CrossRef]
- Huang, Q.; Liu, J.; Li, H.W. A modified adaptive stochastic resonance for detecting faint signal in sensors. Sensors 2007, 7, 157–165. [Google Scholar] [CrossRef]
- Pollak, E.; Talkner, P. Kramers turnover theory for a triple well potential. Acta Phys. Pol. B 2001, 32, 361–371. [Google Scholar]
- Haibin, Z.; Fanrang, K.; Siliang, L.; Qingbo, H. A tri-stable stochastic resonance model and its applying in detection of weak signal. In Proceedings of the 2013 Fourth International Conference on Intelligent Control and Information Processing (ICICIP), Beijing, China, 9–11 June 2013; pp. 199–204.
- Lu, S.L.; He, Q.B.; Zhang, H.B.; Zhang, S.B.; Kong, F.R. Signal amplification and filtering with a tristable stochastic resonance cantilever. Rev. Sci. Instrum. 2013, 84, 1–3. [Google Scholar] [CrossRef] [PubMed]
- Li, J.M.; Chen, X.F.; He, Z.J. Multi-stable stochastic resonance and its application research on mechanical fault diagnosis. J. Sound Vib. 2013, 332, 5999–6015. [Google Scholar] [CrossRef]
- Zhang, H.; He, Q.; Lu, S.; Kong, F. Stochastic resonance with a joint woods-saxon and gaussian potential for bearing fault diagnosis. Math. Probl. Eng. 2014, 2014, 1–17. [Google Scholar] [CrossRef]
- Alfonsi, L.; Gammaitoni, L.; Santucci, S.; Bulsara, A.R. Intrawell stochastic resonance versus interwell stochastic resonance in underdamped bistable systems. Phys. Rev. E 2000, 62, 299–302. [Google Scholar] [CrossRef]
- Kang, Y.M.; Xu, J.X.; Xie, Y. Observing stochastic resonance in an underdamped bistable duffing oscillator by the method of moments. Phys. Rev. E 2003, 68, 1–8. [Google Scholar] [CrossRef]
- Ray, R.; Sengupta, S. Stochastic resonance in underdamped, bistable systems. Phys. Lett. A 2006, 353, 364–371. [Google Scholar] [CrossRef]
- Almog, R.; Zaitsev, S.; Shtempluck, O.; Buks, E. Signal amplification in a nanomechanical duffing resonator via stochastic resonance. Appl. Phys. Lett. 2007, 90, 1–3. [Google Scholar] [CrossRef]
- Xu, Y.; Wu, J.; Zhang, H.Q.; Ma, S.J. Stochastic resonance phenomenon in an underdamped bistable system driven by weak asymmetric dichotomous noise. Nonlinear Dyn. 2012, 70, 531–539. [Google Scholar] [CrossRef]
- Zhao, Z.H.; Yang, S.P. Application of van der pol-duffing oscillator in weak signal detection. Comput. Electr. Eng. 2015, 41, 1–8. [Google Scholar]
- Martinez, E.; Lopez-Diaz, L.; Alejos, O.; Torres, L.; Carpentieri, M. Domain-wall dynamics driven by short pulses along thin ferromagnetic strips: Micromagnetic simulations and analytical description. Phys. Rev. B 2009, 79, 1–14. [Google Scholar] [CrossRef]
- Martinez, E.; Finocchio, G.; Carpentieri, M. Stochastic resonance of a domain wall in a stripe with two pinning sites. Appl. Phys. Lett. 2011, 98, 1–3. [Google Scholar] [CrossRef]
- Øksendal, B. Stochastic differential equations. In Stochastic Differential Equations; Springer: Berlin/Heidelberg, Germany, 2003; pp. 65–84. [Google Scholar]
- Yong, G.L.; Yong, S.L.; Tai, Y.W.; Yan, G. Numerical analysis and engineering application of large parameter stochastic resonance. J. Sound Vib. 2006, 292, 788–801. [Google Scholar]
- Tandon, N.; Choudhury, A. A review of vibration and acoustic measurement methods for the detection of defects in rolling element bearings. Tribol. Int. 1999, 32, 469–480. [Google Scholar] [CrossRef]
- Hu, N.Q.; Chen, M.; Wen, X.S. The application of stochastic resonance theory for early detecting rub-impact fault of rotor system. Mech. Syst. Signal Process. 2003, 17, 883–895. [Google Scholar] [CrossRef]
- Carden, E.P.; Fanning, P. Vibration based condition monitoring: A review. Struct. Health Monit. 2004, 3, 355–377. [Google Scholar] [CrossRef]
- Gao, L.X.; Yang, Z.J.; Cai, L.G.; Wang, H.Q.; Chen, P. Roller bearing fault diagnosis based on nonlinear redundant lifting wavelet packet analysis. Sensors 2011, 11, 260–277. [Google Scholar] [CrossRef] [PubMed]
- Li, J.M.; Chen, X.F.; He, Z.J. Adaptive stochastic resonance method for impact signal detection based on sliding window. Mech. Syst. Signal Process. 2013, 36, 240–255. [Google Scholar] [CrossRef]
- Jiang, K.S.; Xu, G.H.; Liang, L.; Tao, T.F.; Gu, F.S. The recovery of weak impulsive signals based on stochastic resonance and moving least squares fitting. Sensors 2014, 14, 13692–13707. [Google Scholar] [CrossRef] [PubMed]
- He, Q.B.; Wang, X.X.; Zhou, Q. Vibration sensor data denoising using a time-frequency manifold for machinery fault diagnosis. Sensors 2014, 14, 382–402. [Google Scholar] [CrossRef] [PubMed]
- Lei, Y.G.; Li, N.P.; Lin, J.; Wang, S.Z. Fault diagnosis of rotating machinery based on an adaptive ensemble empirical mode decomposition. Sensors 2013, 13, 16950–16964. [Google Scholar] [CrossRef] [PubMed]
- Randall, R.B.; Antoni, J. Rolling element bearing diagnostics-a tutorial. Mech. Syst. Signal Process. 2011, 25, 485–520. [Google Scholar] [CrossRef]
- McDonnell, M.D.; Abbott, D. What is stochastic resonance? Definitions, misconceptions, debates, and its relevance to biology. PLoS. Comput. Biol. 2009, 5, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Chen, H.; Varshney, P.K.; Michels, J.H. Improving sequential detection performance via stochastic resonance. IEEE Signal Process. Lett. 2008, 15, 685–688. [Google Scholar] [CrossRef]
- Galdi, V.; Pierro, V.; Pinto, I.M. Evaluation of stochastic-resonance-based detectors of weak harmonic signals in additive white gaussian noise. Phys. Rev. E 1998, 57, 6470–6479. [Google Scholar] [CrossRef]
- Addesso, P.; Filatrella, G.; Pierro, V. Characterization of escape times of josephson junctions for signal detection. Phys. Rev. E 2012, 85, 1–15. [Google Scholar] [CrossRef]
- Rousseau, D.; Chapeau-Blondeau, F. Stochastic resonance and improvement by noise in optimal detection strategies. Digit. Signal Process. 2005, 15, 19–32. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; He, Q.; Kong, F. Stochastic Resonance in an Underdamped System with Pinning Potential for Weak Signal Detection. Sensors 2015, 15, 21169-21195. https://doi.org/10.3390/s150921169
Zhang H, He Q, Kong F. Stochastic Resonance in an Underdamped System with Pinning Potential for Weak Signal Detection. Sensors. 2015; 15(9):21169-21195. https://doi.org/10.3390/s150921169
Chicago/Turabian StyleZhang, Haibin, Qingbo He, and Fanrang Kong. 2015. "Stochastic Resonance in an Underdamped System with Pinning Potential for Weak Signal Detection" Sensors 15, no. 9: 21169-21195. https://doi.org/10.3390/s150921169