
Development of a Plug-and-Play Monitoring System for Cabled Observatories in the East China Sea

Abstract
:1. Introduction
2. Architecture Design for ESOMS
2.1. Control Model Derived Architecture

2.2. Operational Information Flow
3. Plug-and-Play Implementation of ESOMS
3.1. Plug-and-Play Solution
3.2. GOE Control Method

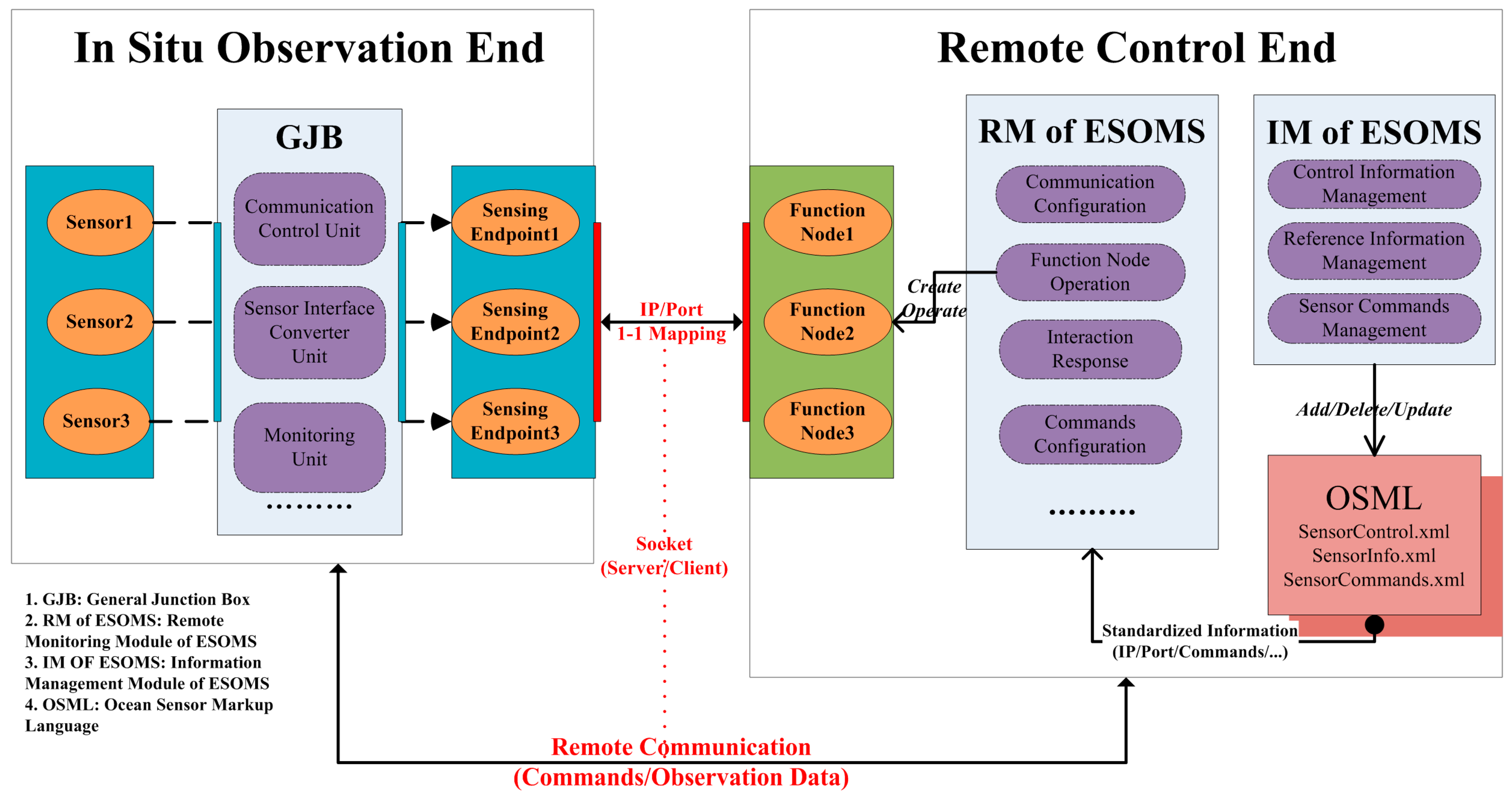
3.2.1. GJB for Interfacing and Networking Sensors
3.2.2. OSML for Modeling and Controlling Sensors
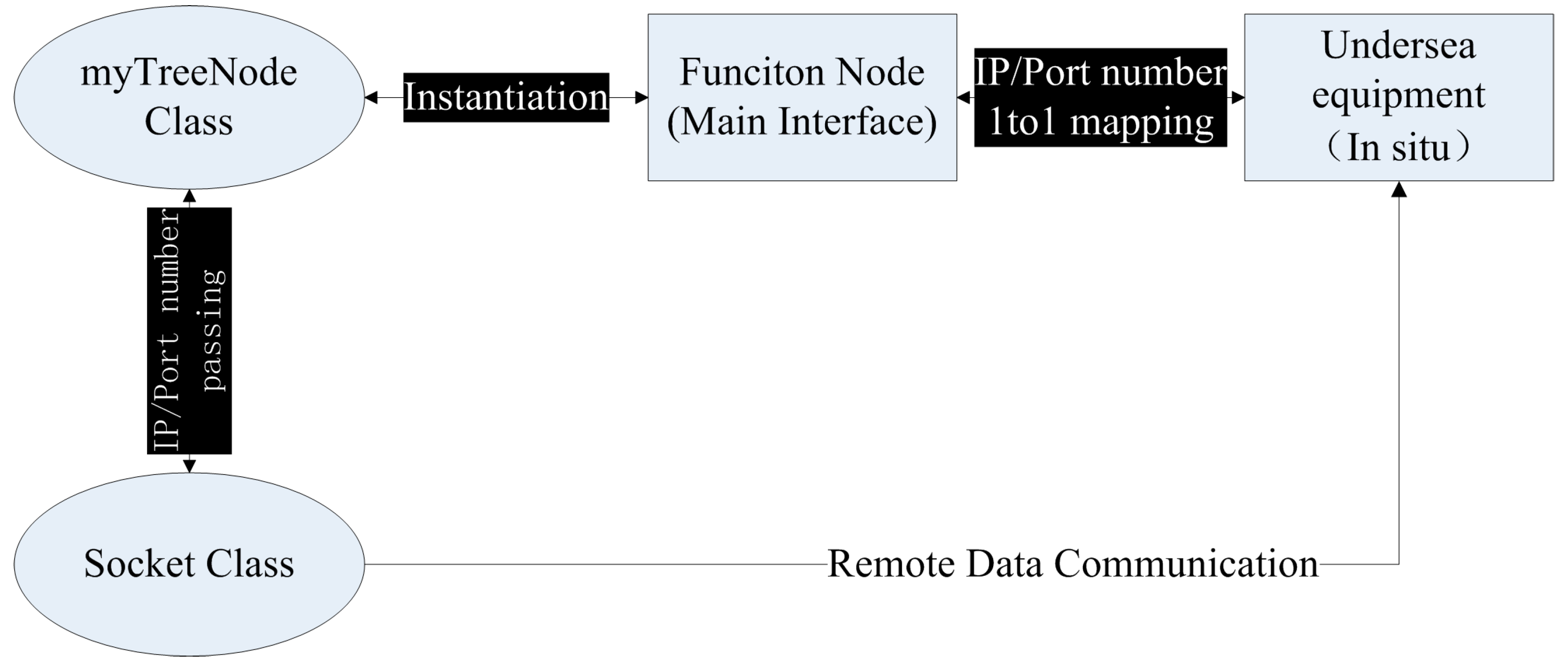
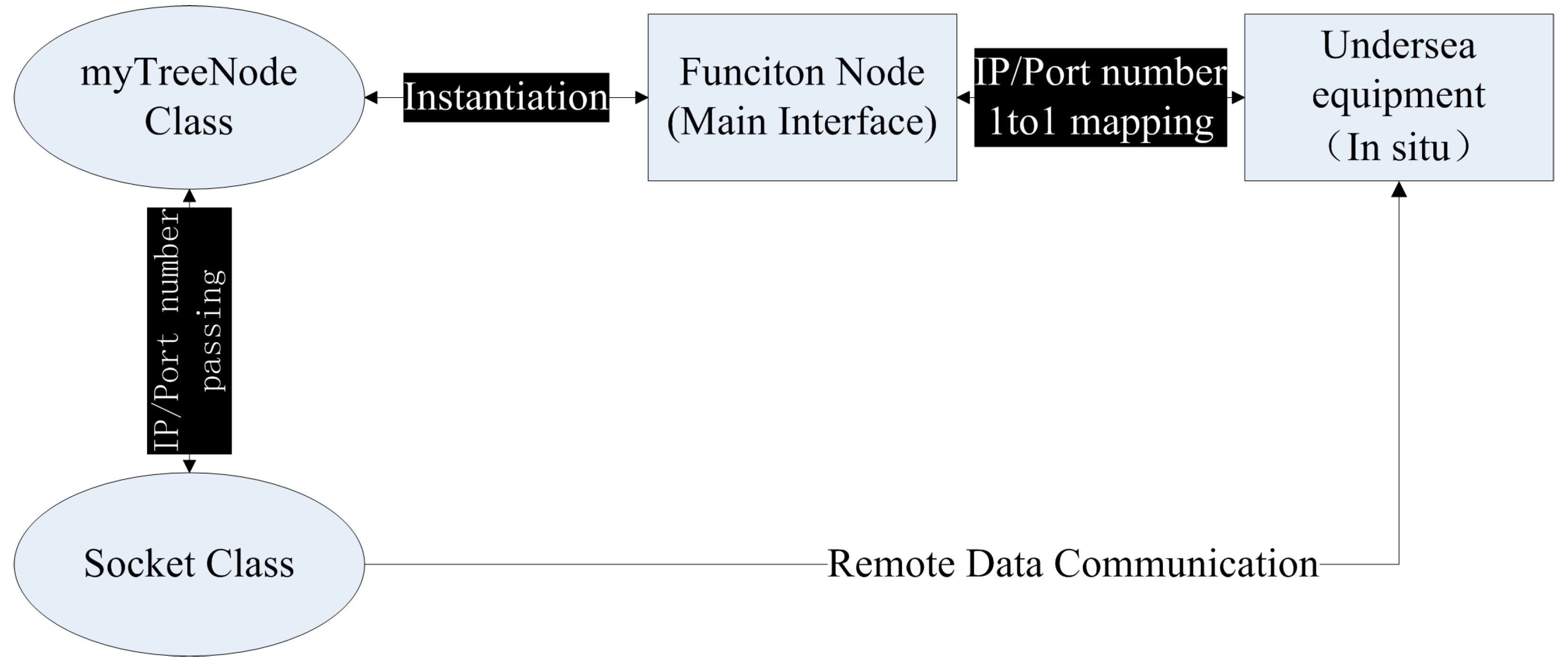
3.2.3. Function Node for Remote Communication
3.3. System Optimization
3.3.1. Communication Optimization
3.3.2. Power System Optimization
3.3.3. Centralized Management for in Situ Sensors
4. A Case Study for Using ESOMS
4.1. Experimental Scenario: Xiaoqushan Seafloor Observatory

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Original Observatory | Upgrade Observatory |
|---|---|---|
| Video | √ | √ |
| CO2 | × | √ |
| OBS | × | √ |
| CTD | √ | √ |
| Turbidity | √ | √ |
| Underwater CO2 | × | √ |
| PH | × | √ |
| Tide and Wave | × | √ |
| ADCP | √ | √ |
| Imaging Sonar | × | √ |
| Magnetometer | × | √ |
4.2. Prototype System Test: Processes and Results

- (a)
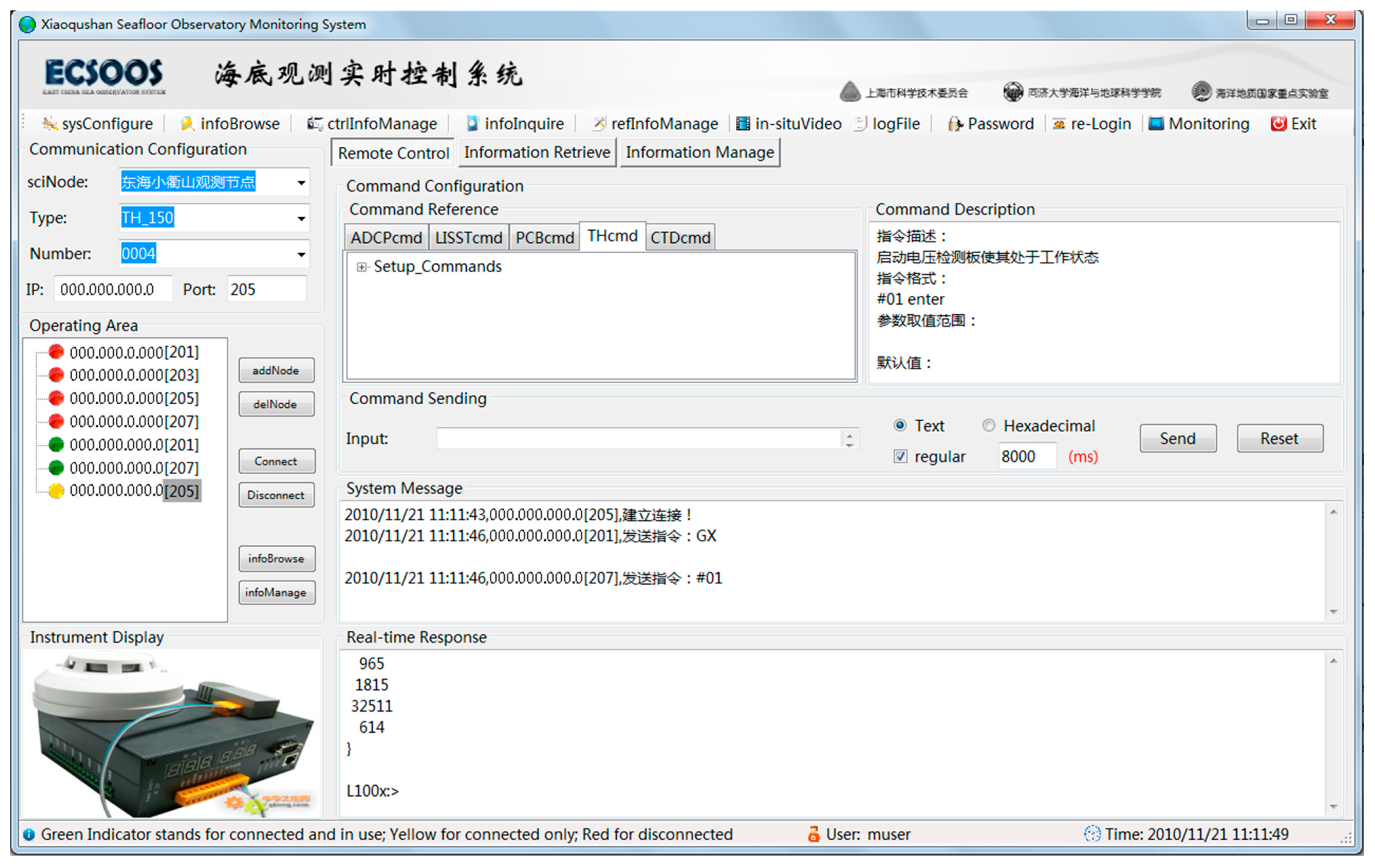
- The remote monitoring module of ESOMS was implemented to dynamically receive and store all the in situ data, on-line monitor the Xiaoqushan Seafloor Observatory, autonomously interpret raw data for event detection and response, and remotely control undersea observation equipment.
- (b)
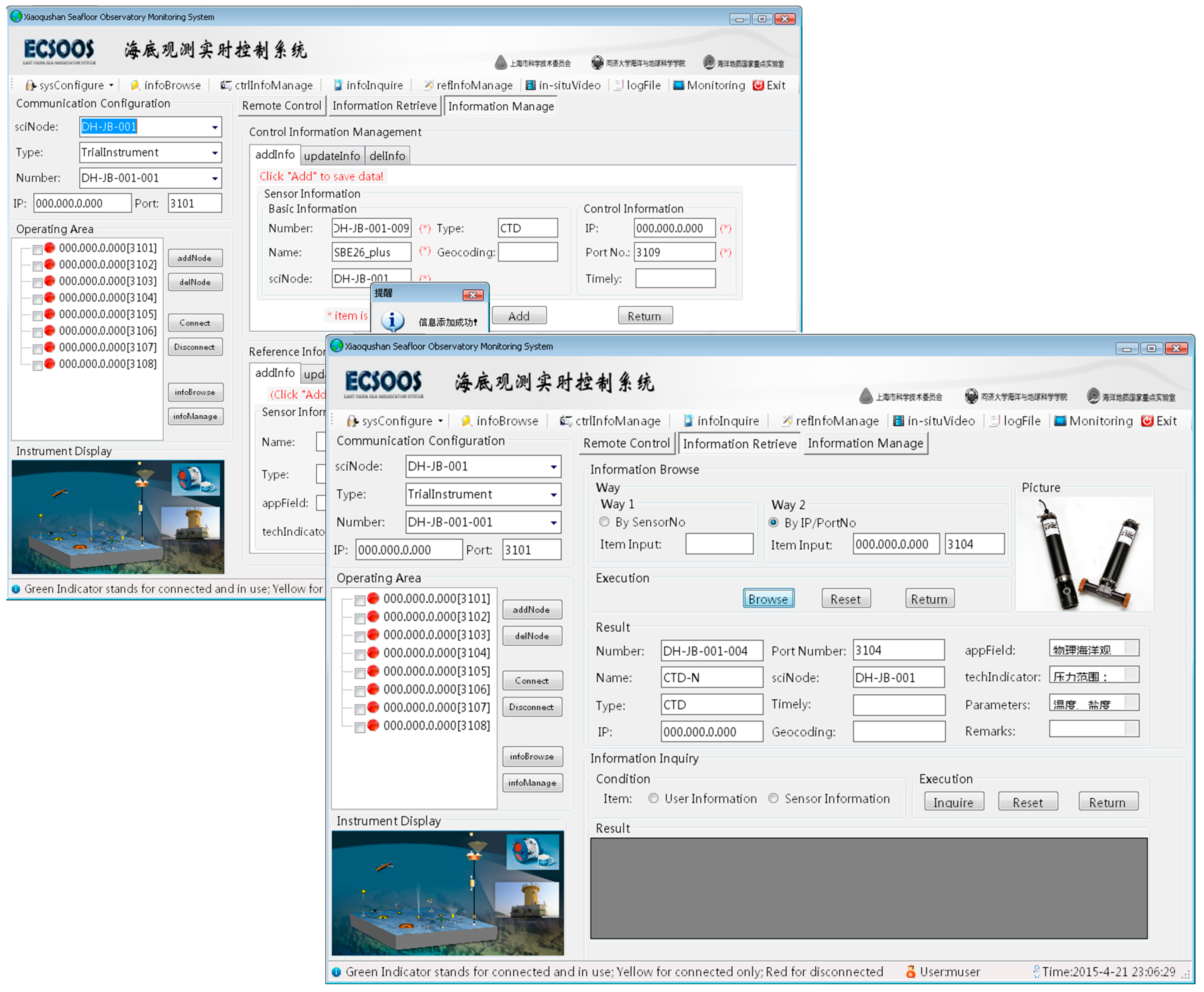
- The information management module of ESOMS was implemented to dynamically manage (add, delete or edit) and refresh these three types of sensor information (seen in Figure 5) for remote monitoring in the Main Interface, and synchronously update the changes in the database.
- (c)
- The information retrieval module of ESOMS was implemented (seen in Figure 5) to enable operators to know all the information related to deployed sensors in the cabled observatory, and provide statistical information distribution.
- (d)
- The system management module of ESOMS was implemented to configure the refresh rate for data display containers like System Message Area and Real-time Response Area while executing remote control operations, and to query and browse historical operations in ESOMS.
- (e)
- The user management module of ESOMS was implemented to enhance the system security through 3 layers filtering: (i) invalidated users were not allowed to use the monitoring system; (ii) every registered user was assigned different levels of management authority to perform operations in ESOMS (gray menu in the Main Interface was currently unavailable); (iii) ESOMS automatically recorded any operation any user performed in the log file, defining responsibility to some extent.
4.3. System Performance and Initial Outcome
- (1)
- All data collected from the Xiaoqushan Seafloor Observatory were received, interpreted and stored in a real-time way. Science data were reliably associated with metadata and performed a data quality control.
- (2)
- All facilities within the Xiaoqushan Seafloor Observatory and various marine environment parameters were on-line monitored, and the deployed sensors were controllable from shore-based platforms. Operators on shore can interactively modify data acquisition schedules and other working parameters for the observatory sensor network, and can remotely diagnose the cabled observatory.
- (3)
- ESOMS was able to autonomously detect events of interest and quickly respond to them. Some events of interest may occur when operators were not actively examining the data stream for events (e.g., late at night), and thus demanded that ESOMS can automatically detect these events in the instrument data streams and respond with predefined remote control capabilities. This feature enabled adaptive in situ experiments and obtained more scientific outcomes.
- (4)
- The Xiaoqushan Seafloor Observatory was able to support oceanographic instrumentation for shallow water trial, including commercial sensors and customized ones. The process of adding/removing observation nodes and sensors from the deployed system was simple, robust and scalable to the cabled observatory when demands emerged for carrying out more experimental tasks under sea.
- (5)
- The ESOMS architecture enabled interaction with other kinds of devices and systems, such as autonomous underwater vehicles and different kinds of moorings or cable-shore systems.
5. Discussion and Conclusions
- (1)
- A control model for an ocean observatory sensor network. The model was information oriented and was logically structured into four layers functioning in a standardized way. The model contributed to both vertical and horizontal integration of the ocean observatory sensor network, based on which different monitoring architectures and deployment strategies can be derived.
- (2)
- A monitoring architecture for cabled observatories in the East China Sea. The architecture contained three components and enabled bidirectional information flow of observation data and control commands. The architecture contributed to a system level of plug and play mode for in situ sensors in the observatories, based on which components were related to model layers and designed for plug-and-play enablement.
- (3)
- A GOE Control Method for the plug-and-play implementation of ESOMS. The method mainly actualized two processes, one of which was that the in situ GJB interfaced and represented every attached sensor as a Sensing Endpoint in the cabled observatory network. The other process was that the remote ESOMS utilized the same IP/Port related information modeled by OSML to create/operate a Function Node acted as agent of the in situ sensor. The method laid the foundation for the standardization of sensor communication and control at the system level, based on which ESOMS demanded no additional design for controlling new added sensors in the cabled observatories.
- (4)
- A case study for the test and application of ESOMS. Experimental scenario was made for the Xiaoqushan Seafloor Observatory and a series of operational processes were tested. ESOMS presented satisfactory performance against all the functional requirements laid for the project, based on which some initial outcomes of data application were obtained.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- State Key Laboratory of Marine Geology (Tongji University). Observation data Compilation of the East China Sea; State Key Laboratory of Marine Geology: Shanghai, China, 2010. [Google Scholar]
- Wang, P.X. Seafloor observatories. World. Sci. 2007, 11, 2–5. [Google Scholar]
- Wang, P.X. Seafloor observatories—the third observation platform for earth system. Chin. J. Nat. 2007, 29, 125–130. [Google Scholar]
- FOX, C.G.; Radford, W.E.; Dziak, R.P.; Lau, T.; Matsumoto, H.; Schreiner, A.E. Acoustic detection of a seafloor spreading episode on the Juan de Fuca Ridge using military hydrophone arrays. Geophys. Res. Lett. 1995, 22, 131–134. [Google Scholar] [CrossRef]
- Ruhl, H.A.; André, M.; Beranzoli, L.; Cagatay, M.N.; Colaço, A.; Cannat, M.; Dañobeitia, J.J.; Favali, P.; Géli, L.; Gillooly, M.; et al. Societal need for improved understanding of climate change, anthropogenic impacts, and geo-hazard warning drive development of ocean observatories in European Seas. Prog. Oceanorg. 2011, 91, 1–33. [Google Scholar] [CrossRef]
- Dewey, R.; Round, R.; Macoun, P.; Vervynck, J.; Tunnicliffe, V. The VENUS Cabled Observatory: Engineering Meets Science on the Seafloor. In Proceedings of the OCEANS 2007 MTS/IEEE Conference & Exhibition, Vancouver, BC, Canada, 29 September–4 October 2007.
- Delaney, J.R.; Chave, A.D. NEPTUNE: A fiber-optic “telescope” to the inner space. Oceanus 2000, 42, 10–11. [Google Scholar]
- Clark, H.L.; Isern, A. The OOI and the IOOS—Can They Be Differentiated? An NSF Perspective. Oceanography 2003, 16, 20–21. [Google Scholar] [CrossRef]
- Person, R.; Beranzoli, L.; Berndt, C.; Daobeitia, J.J.; Diepenbroecke, M.; Favali, P.; Gillooly, M.; Miranda, J.M.; Pouliquen, S.; Priede, I.E.; et al. The European Deep Sea Observatories Network of Excellence ESONET. In Proceedings of the OCEANS 2007 Europe, Aberdeen, Scotland, UK, 18–21 June 2007.
- Howe, B.M.; McGinnis, T. Sensor networks for cabled ocean observatories. In Proceedings of the 3rd International Workshop on Scientific Use of Submarine Cables and Related Technologies, Tokyo, Japan, 25–27 June 2003.
- Clark, H.L. New seafloor observatory networks in support of ocean science research. In Proceedings of the OCEANS 2001 MTS/IEEE Conference & Exhibition, Honolulu, HI, USA, 5–8 November 2001.
- Favali, P.; Beranzoli, L. Seafloor Observatory Science: A Review. Ann. Geophys. Italy 2006, 49, 515–567. [Google Scholar]
- Xu, H.P.; Zhang, Y.W.; Xu, C.W.; Li, J.R.; Liu, D.; Qin, R.F.; Luo, S.Q.; Fan, D.D. Coastal seafloor observatory at Xiaoqushan in the East China Sea. Chin. Sci. Bull. 2011, 56, 1839–1845. [Google Scholar] [CrossRef]
- Xu, H.P.; Yu, Y.; Qin, R.F. Tests and Upgrades for the East China Sea Seafloor Observatory. Sea Technol. 2012, 53, 56–58. [Google Scholar]
- Yu, Y.; Xu, H.P.; Jiang, E.Z. The Primary Research of the Junction Box Based Seafloor Observatory Remote Control System. In Proceedings of the 2nd International Conference on Multimedia Technology, Hangzhou, China, 26–28 July 2011.
- Yu, Y.; Xu, H.P.; Xu, C.W.; Qin, R.F. A study of the remote control for the East China Sea Seafloor Observation System. J. Atmos. Ocean. Technol. 2012, 29, 1149–1158. [Google Scholar] [CrossRef]
- Gong, H.Y. A Client/Server-Based Network Integrated Monitoring System. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2003. [Google Scholar]
- Satoh, I. A mobile agent-based framework for active networks. In Proceedings of the 1999 IEEE International Conference on Systems, Man, and Cybernetics, Tokyo, Japan, 12–15 October 1999.
- Belotti, V.; Crenna, F.; Michelini, R.C.; Rossi, G.B. A client–server architecture for the remote sensing and control of a drilling robot. Measurement 2007, 40, 109–122. [Google Scholar] [CrossRef]
- Ali, G.; Shaikh, N.A.; Shah, M.A.; Shaikh, Z.A. Decentralized and Fault-tolerant FIPA-compliant Agent Framework Based on .Net. Aust. J. Basic Appl. Sci. 2010, 4, 844–850. [Google Scholar]
- Yuan, X.Y.; Niu, Y.; Yu, Q.; Zhang, X. Configuration Control Technologies; Publishing House of Electronics Industry: Beijing, China, 2003. [Google Scholar]
- O'Reilly, T.C.; Headley, K.L.; Herlien, R.A.; Risi, M.; Davis, D.; Edgington, D.R.; Gomes, K.; Meese, T.; Graybeal, J.B.; Chaffey, M. Software Infrastructure and Applications for the Monterey Ocean Observing System: Design and Implementation. In Proceedings of the OCEANS 2004 MTS/IEEE Conference & Exhibition, Kobe, Japan, 9–12 November 2004.
- Go’mez, I.; Estrela, M.J. Design and development of a Java-based graphical user interface to monitor/control a meteorological real-time forecasting system. Comput. Geosci. UK 2010, 36, 1345–1354. [Google Scholar] [CrossRef]
- Pang, W.Y. Research and Exploitation of Remote Control System Based on C/S Pattern. Ph.D. Thesis, Zhejiang University, Hangzhou, China, 2003. [Google Scholar]
- Lu, F.; Zhou, H.Y.; Yue, J.G.; He, B. Remote Power Monitoring and Control System for Cabled Seafloor Observatory Networks. J. Tongji Univ. (Nat. Sci.) 2014, 42, 1725–1732. [Google Scholar]
- Shanghai Center of Marine Science & Technology, State Key Laboratory of Marine Geology (Tongji University). China Seafloor Observation—Science and Technology; Tongji Press: Shanghai, China, 2011. [Google Scholar]
- Zhang, Y.W.; Fan, D.D.; Xu, H.P. Records of the tsunami induced by the 2010 Chilean earthquake from Xiaoqushan seafloor observatory in the East China Sea. Chin. Sci. Bull. 2011, 56, 2957–2965. [Google Scholar] [CrossRef]
- Rio, J.D.; Toma, D.M.; O’Reilly, T.C.; Bröring, A.; Dana, D.R.; Bache, F.; Headley, K.L.; Mànuel-Làzaro, A. Standards-Based Plug & Work for Instruments in Ocean Observing Systems. IEEE J. Ocean. Eng. 2014, 39, 430–443. [Google Scholar]
- Barnes, C.R.; Best, M.M.R.; Johnson, F.R.; Pautet, L.; Pirenne, B. Challenges, Benefits, and Opportunities in Installing and Operating Cabled Ocean Observatories: Perspectives from NEPTUNE Canada. In Proceedings of 2011 IEEE Symposium on and 2011 Workshop on Scientific Use of Submarine Cables and Related Technologies (SSC) Underwater Technology (UT), Tokyo, Japan, 5–8 April 2011; pp. 1–7.
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Y.; Xu, H.; Xu, C. Development of a Plug-and-Play Monitoring System for Cabled Observatories in the East China Sea. Sensors 2015, 15, 17926-17943. https://doi.org/10.3390/s150817926
Yu Y, Xu H, Xu C. Development of a Plug-and-Play Monitoring System for Cabled Observatories in the East China Sea. Sensors. 2015; 15(8):17926-17943. https://doi.org/10.3390/s150817926
Chicago/Turabian StyleYu, Yang, Huiping Xu, and Changwei Xu. 2015. "Development of a Plug-and-Play Monitoring System for Cabled Observatories in the East China Sea" Sensors 15, no. 8: 17926-17943. https://doi.org/10.3390/s150817926