
Real-Time PPP Based on the Coupling Estimation of Clock Bias and Orbit Error with Broadcast Ephemeris

Abstract
:1. Introduction
2. Estimation for the Parameter of Coupling Clock Bias with Orbit Error (PCCO)
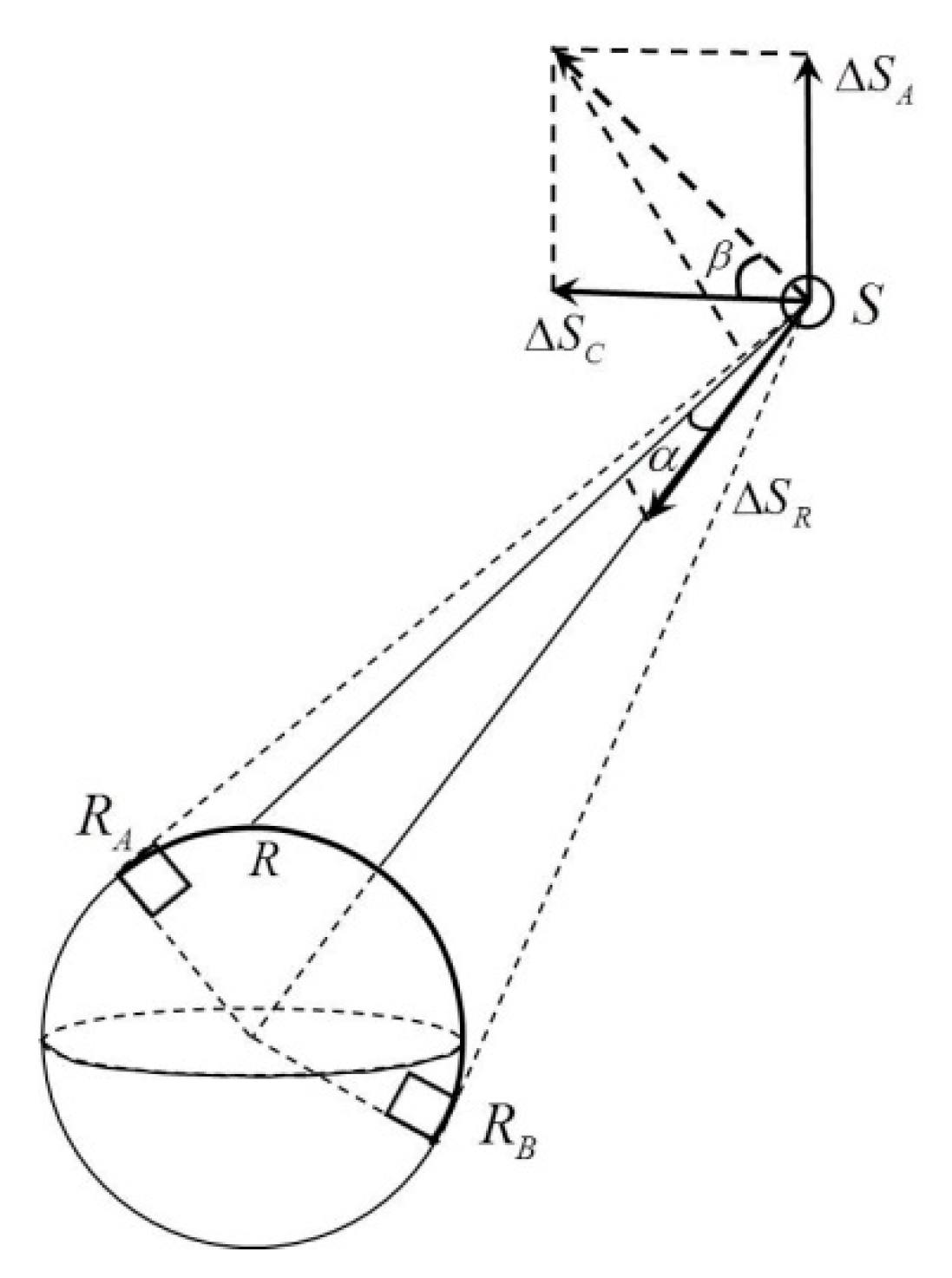
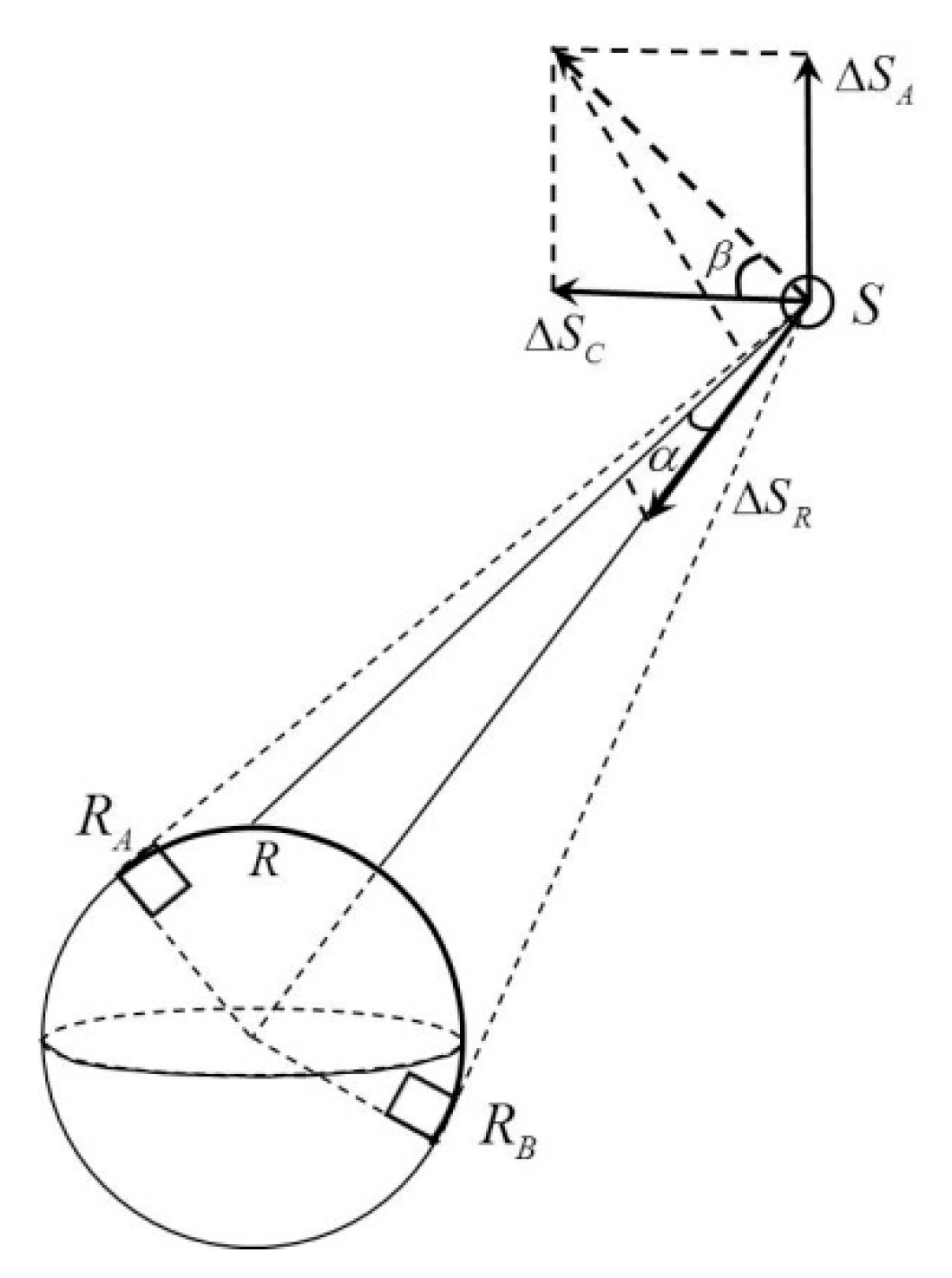
2.1. Coupling of Clock Bias and Orbit Error
2.2. Joint Weighted Estimation of PCCO Based on Regional CORS
- At the first epoch, the satellite clock bias is calculated by using the pseudorange observation equation;
- At epoch n, through the difference among the phase observations, the epoch differential phase observations are added to the pseudorange observation and the initial epoch to create a new pseudorange observation . The expression is expressed as follows:
2.3. PCCO Effect on Observation Equations
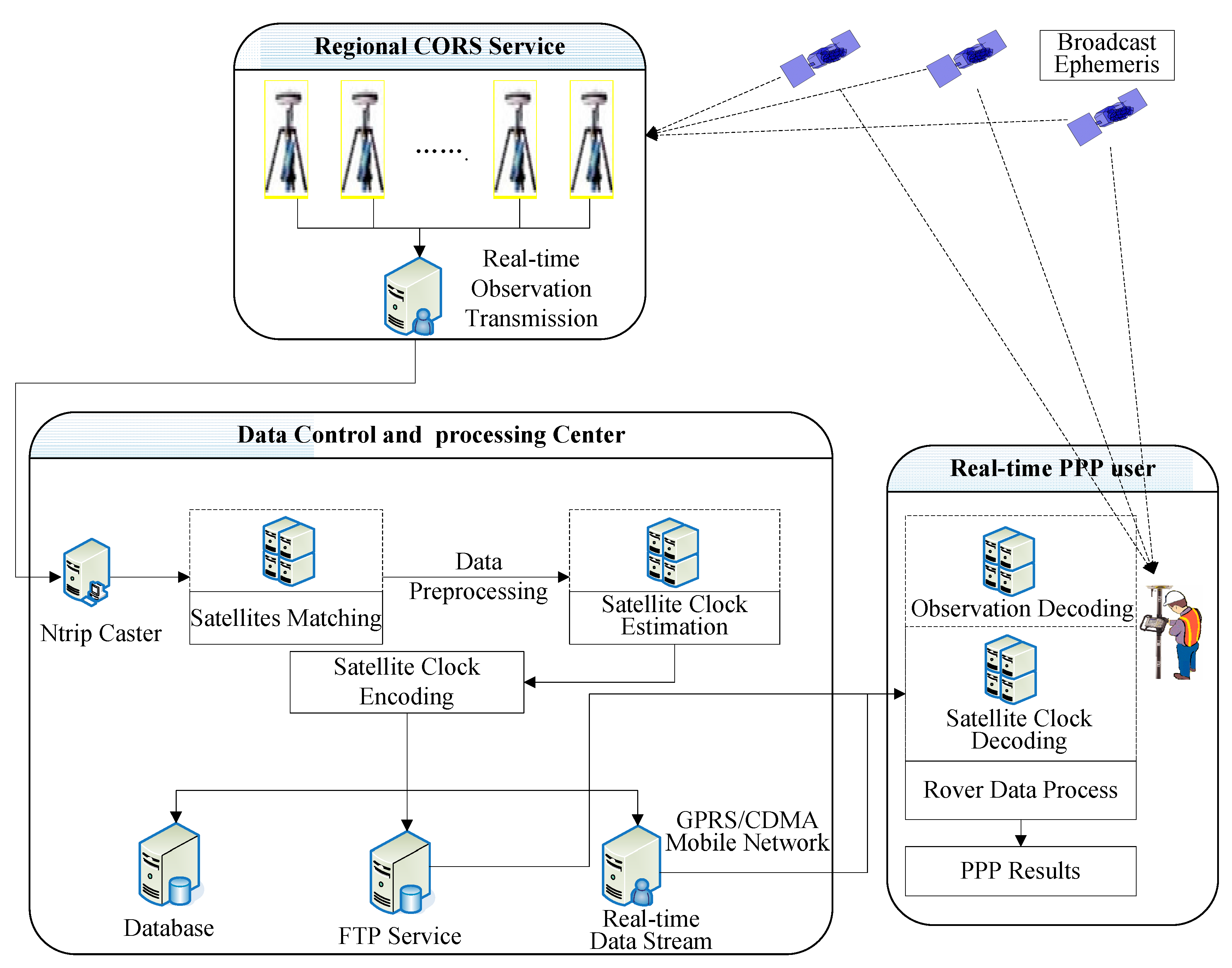
3. Real-Time PPP System Based on PCCO
- (1)
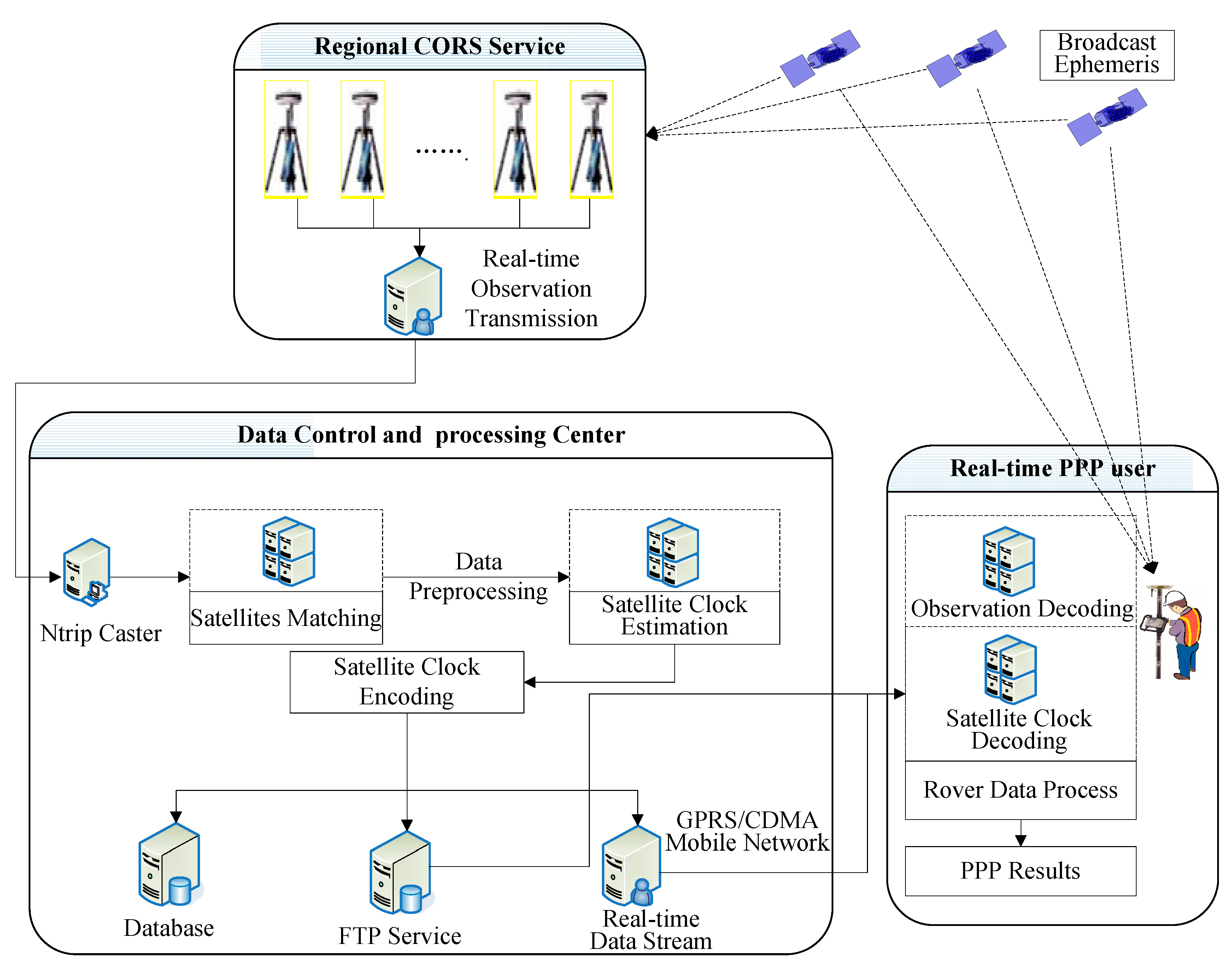
- The “regional CORS reference stations” receive GNSS observations and broadcast ephemeris.
- (2)
- The “data control and processing center” receives observation data and the broadcast ephemeris from the regional CORS and then calculates the PCCO after data preprocessing.
- (3)
- The PCCO is encoded, instantaneously broadcasted to the rover user by a mobile network, and uploaded to the database for post-processing users. Since the single-difference results clock the bias of a pair of satellites, the satellite clock bias is given to the rover in pairs.
- (4)
- The PPP user receives observation data and broadcast ephemeris and obtains the clock bias coupled with orbit error followed by PPP.
- (1)
- In this system, satellite clock bias is coupled with orbit error as an estimation parameter. Therefore, precise ephemeris is no longer demanded because broadcast ephemeris is enough for real-time PPP.
- (2)
- PCCO can generate real-time clock bias coupled with orbit error by regional CORS and can broadcast to the rover instantaneously. PCCO has better real-time performance than the IGS real-time data stream.
- (3)
- PCCO only needs regional CORS and does not rely on global distribution station; thus, the PCCO method is easy to implement and is suitable for engineering practice.
4. Experiment and Analysis
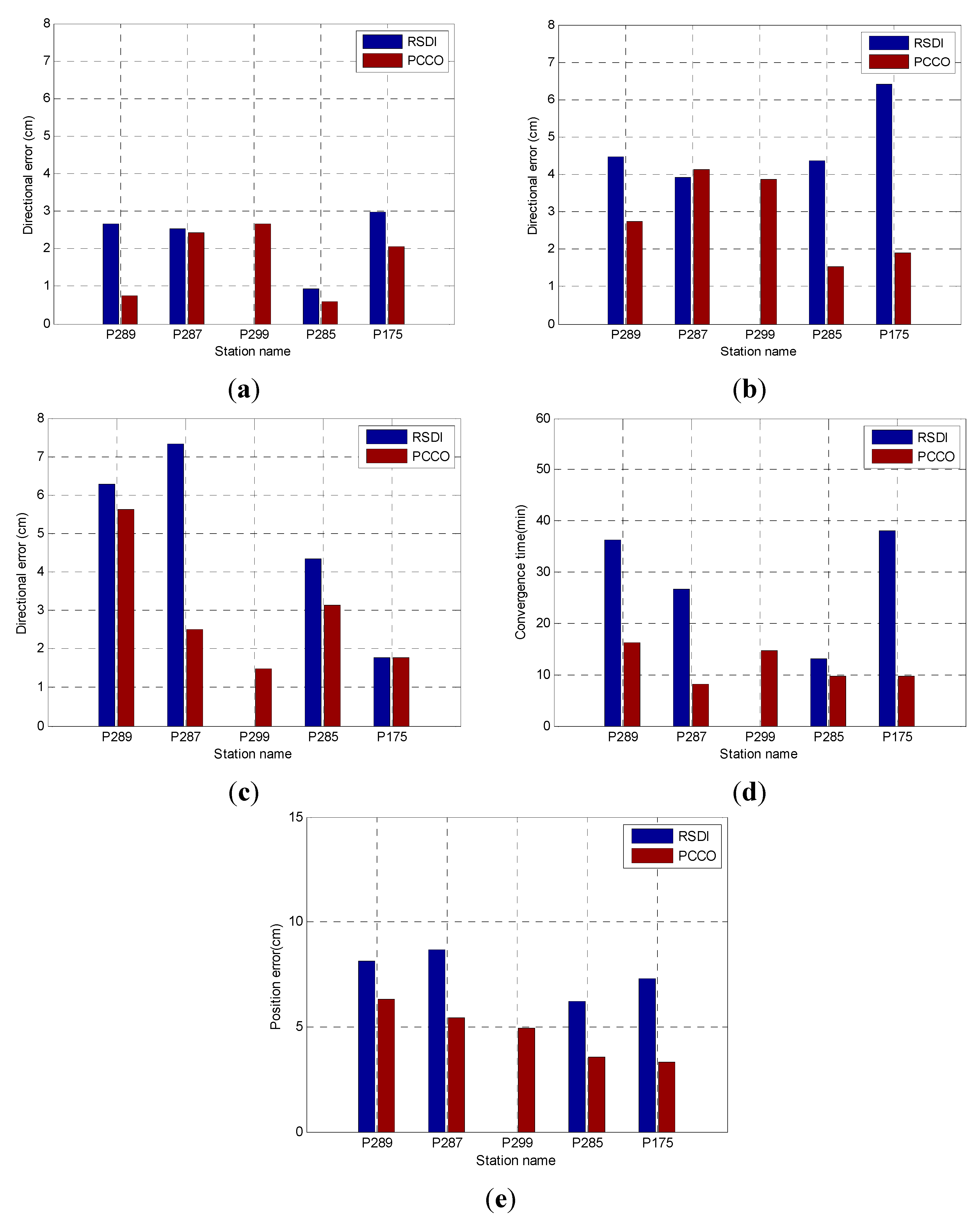
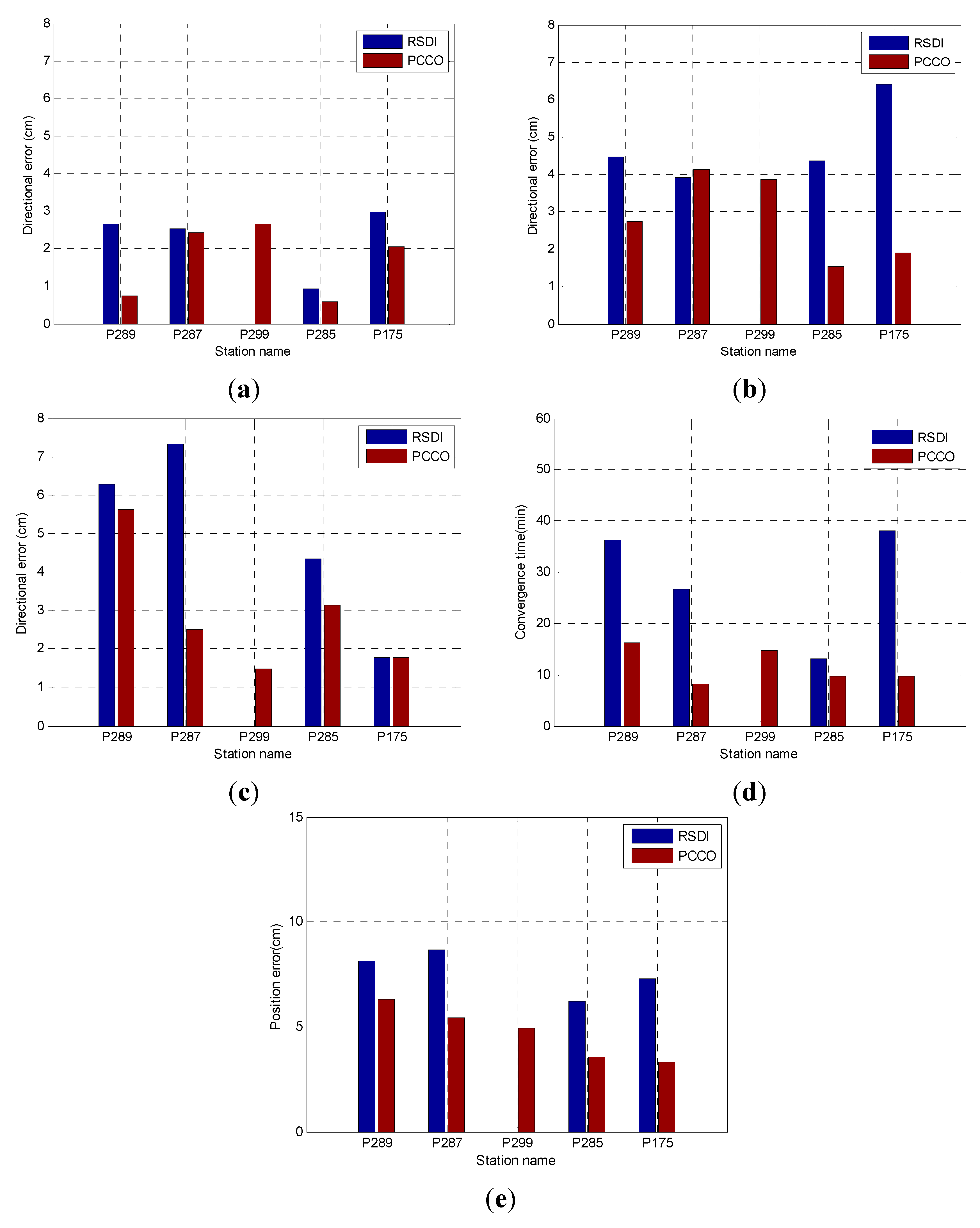
4.1. Experiment within the Network

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Station Name | RSDI | PCCO | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Directional Error (cm) | Position Error (cm) | Convergence Time (min) | Directional Error (cm) | Position Error (cm) | Convergence Time (min) | |||||
| N | E | U | N | E | U | |||||
| P289 | 2.65 | 4.48 | 6.28 | 8.16 | 36.25 | 0.75 | 2.74 | 5.62 | 6.30 | 16.25 |
| P287 | 2.52 | 3.91 | 7.33 | 8.68 | 26.75 | 2.42 | 4.14 | 2.50 | 5.41 | 8.25 |
| P299 | - | - | - | - | - | 2.67 | 3.87 | 1.47 | 4.93 | 14.75 |
| P285 | 0.94 | 4.36 | 4.35 | 6.23 | 13.00 | 0.58 | 1.54 | 3.14 | 3.55 | 9.75 |
| P175 | 2.97 | 6.42 | 1.78 | 7.29 | 38.00 | 2.07 | 1.89 | 1.78 | 3.32 | 9.75 |
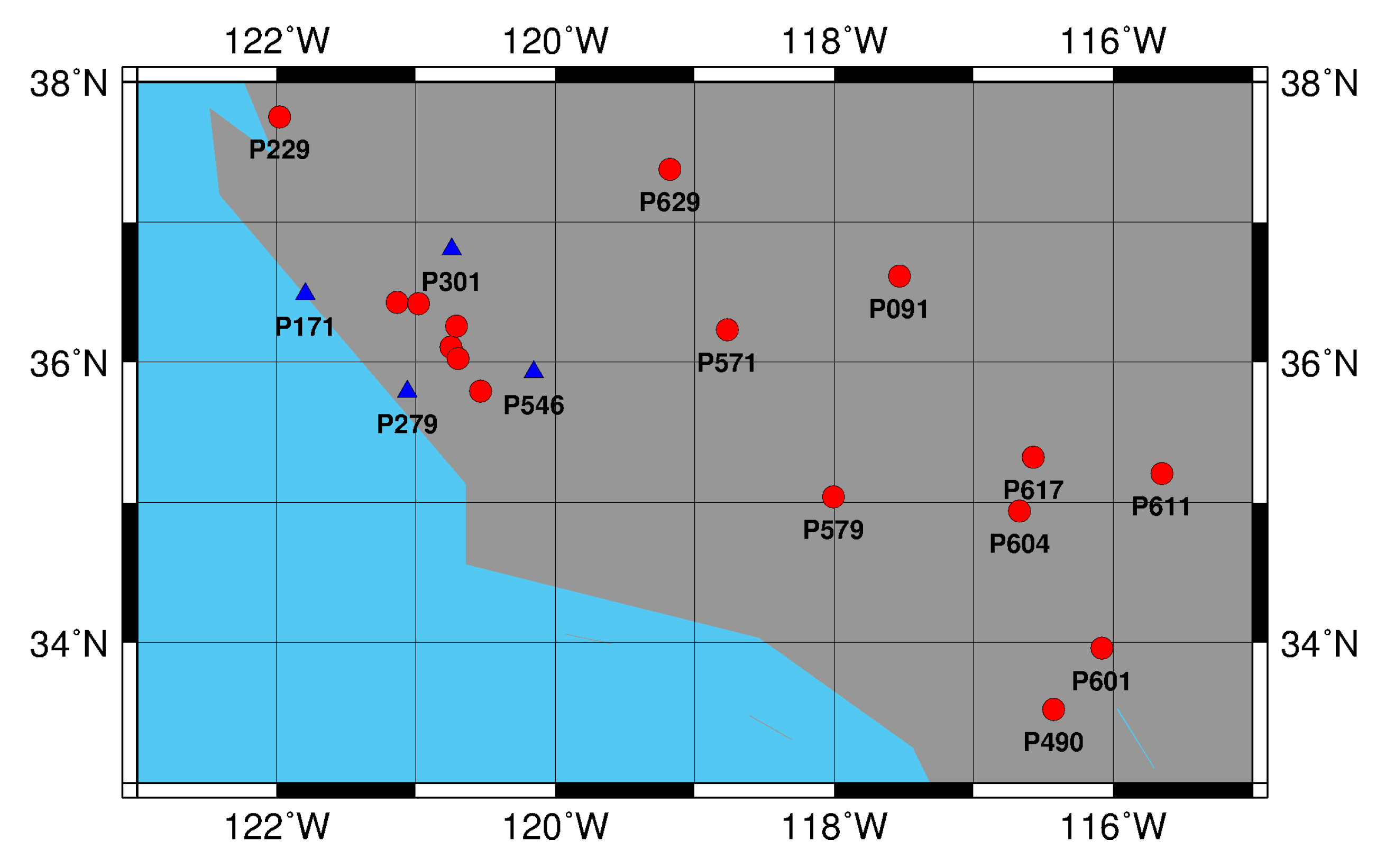
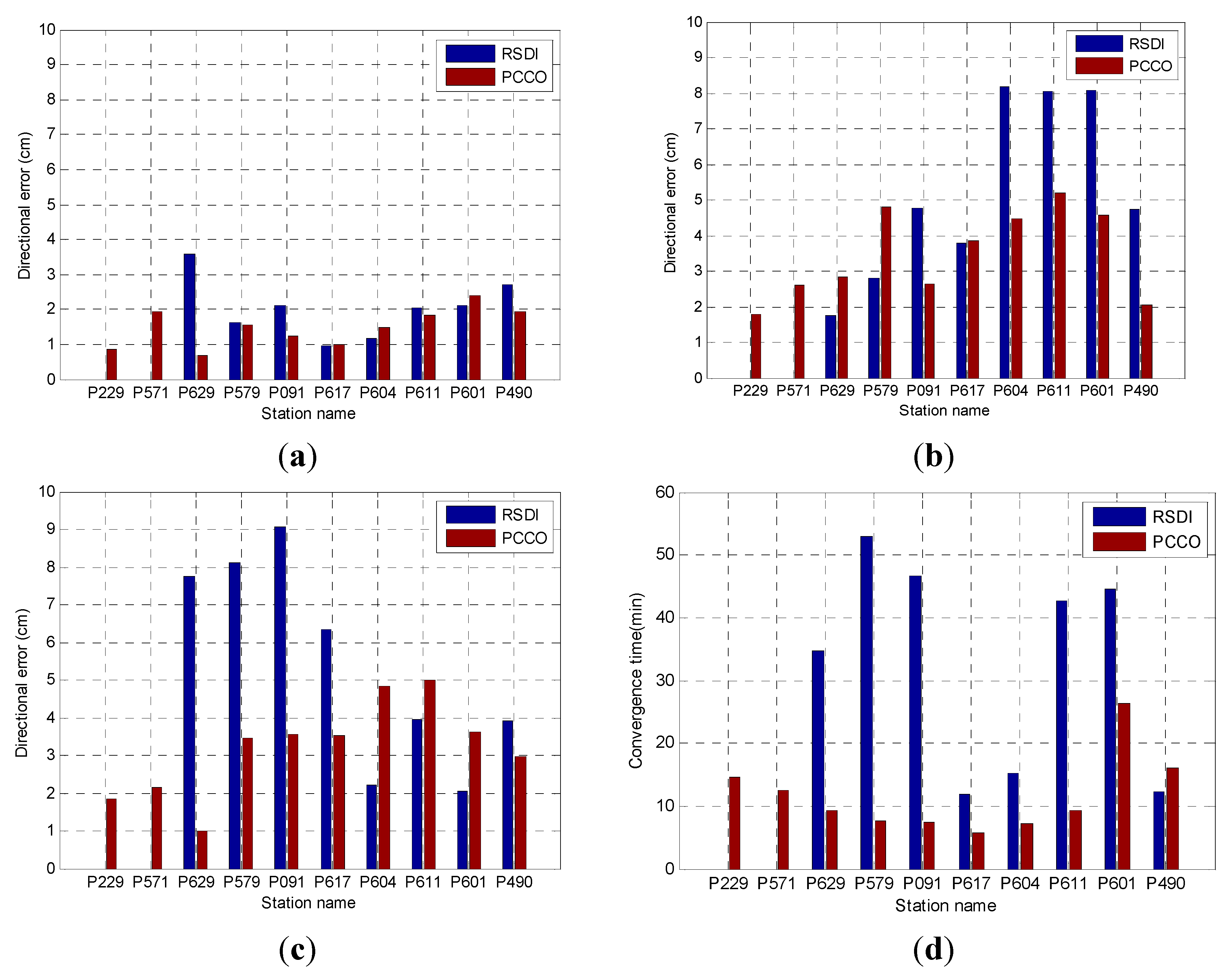
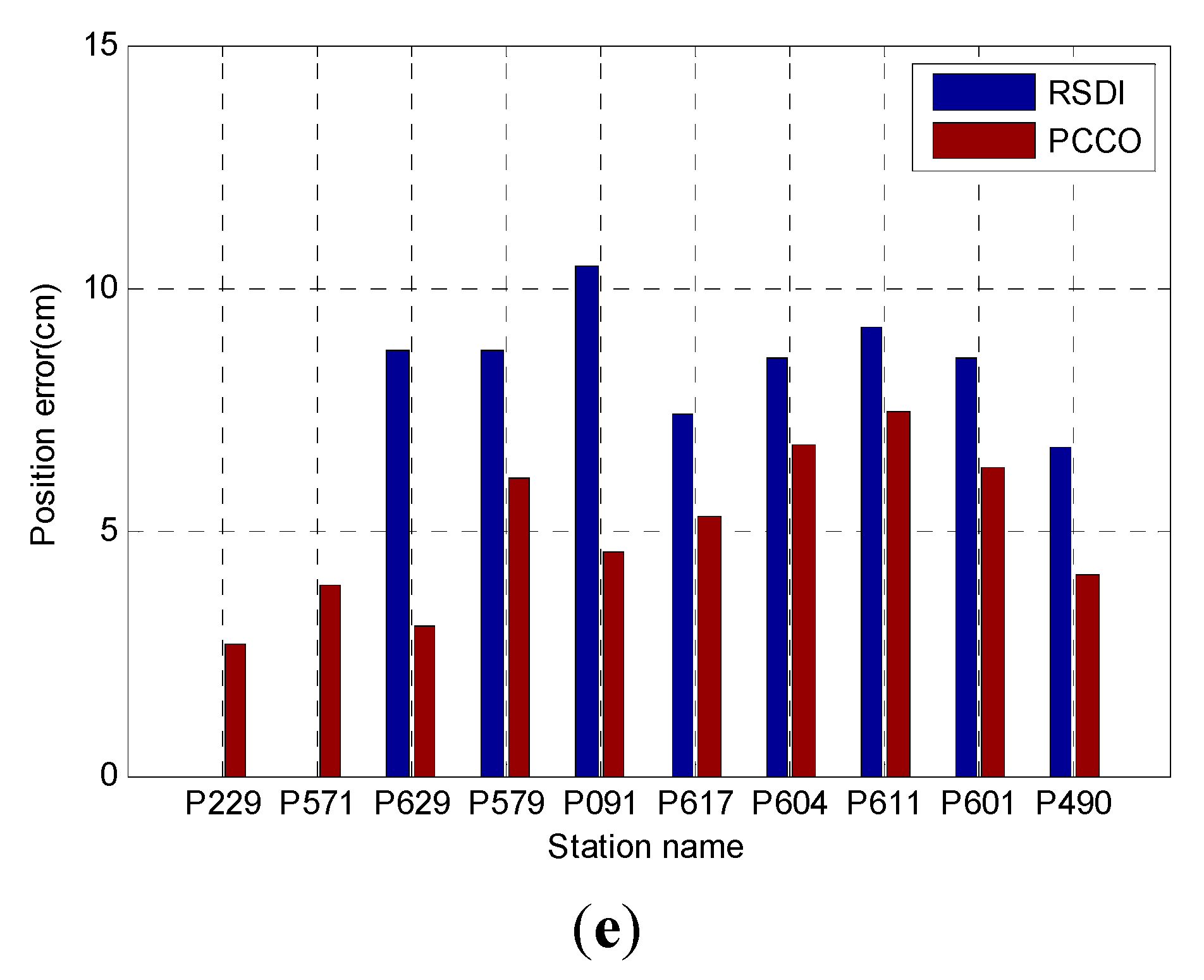
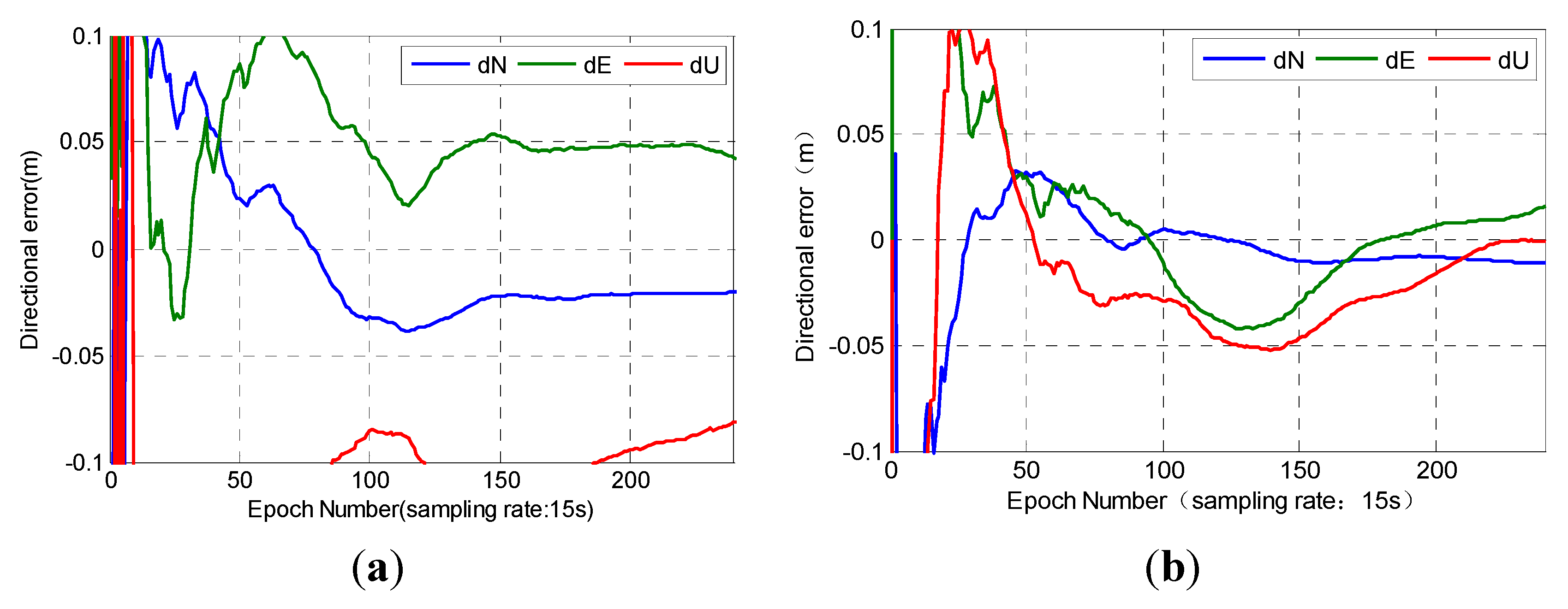
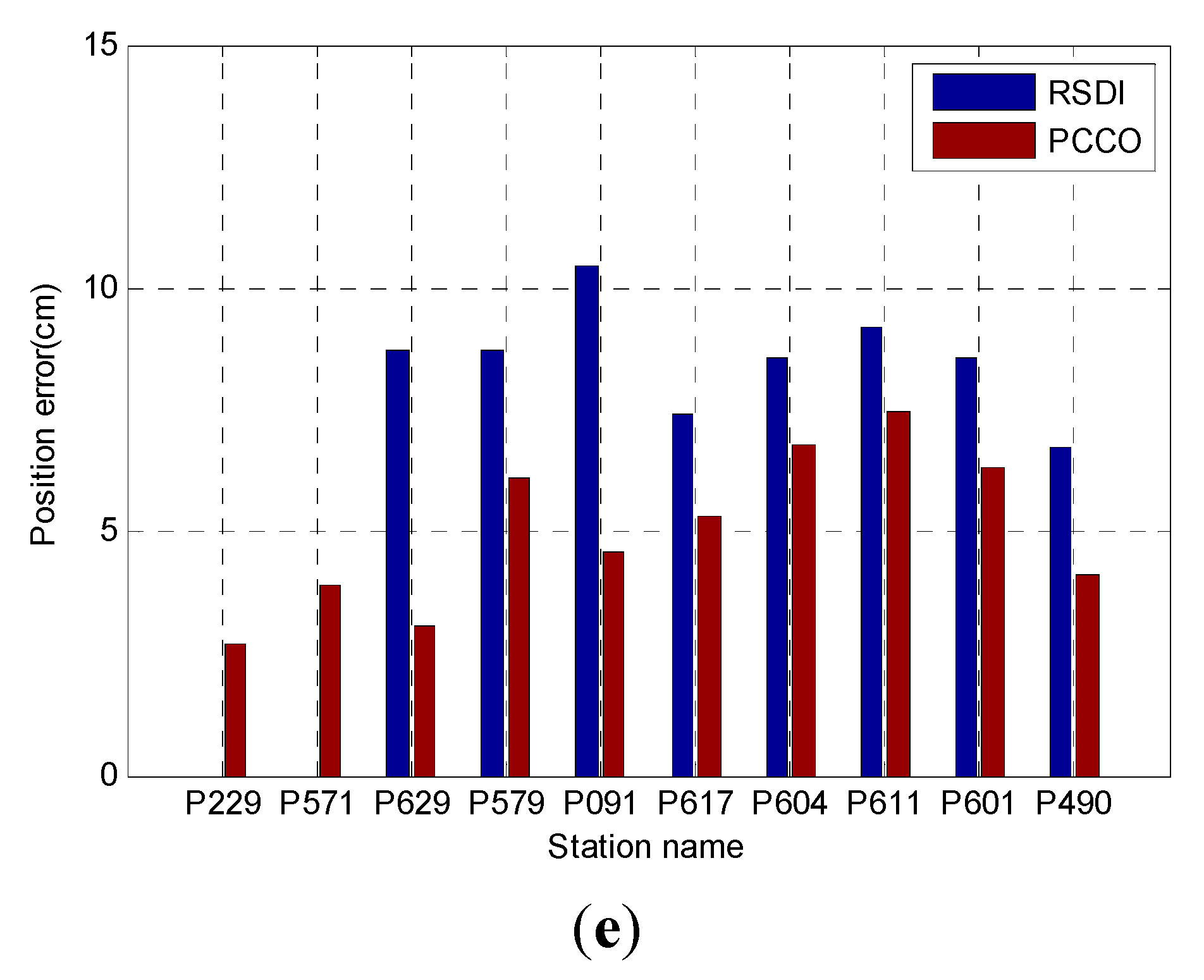
4.2. Experiment Outside the Network

| Station Name | Distance (km) | RSDI | PCCO | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Directional Error (cm) | Position Error (cm) | Convergence Time (min) | Directional Error (cm) | Position Error (cm) | Convergence Time (min) | ||||||
| N | E | U | N | E | U | ||||||
| P229 | 190.0 | - | - | - | - | - | 0.86 | 1.80 | 1.84 | 2.71 | 14.50 |
| P571 | 195.1 | - | - | - | - | - | 1.95 | 2.60 | 2.16 | 3.90 | 12.50 |
| P629 | 200.3 | 3.59 | 1.76 | 7.75 | 8.72 | 34.75 | 0.69 | 2.83 | 1.01 | 3.08 | 9.25 |
| P579 | 297.7 | 1.61 | 2.79 | 8.12 | 8.74 | 53.00 | 1.54 | 4.80 | 3.46 | 6.11 | 7.75 |
| P091 | 308.0 | 2.10 | 4.77 | 9.06 | 10.45 | 46.75 | 1.24 | 2.63 | 3.55 | 4.59 | 7.50 |
| P617 | 407.9 | 0.96 | 3.78 | 6.34 | 7.44 | 11.75 | 1.01 | 3.84 | 3.54 | 5.32 | 5.75 |
| P604 | 413.2 | 1.18 | 8.18 | 2.22 | 8.56 | 15.25 | 1.48 | 4.49 | 4.84 | 6.77 | 7.25 |
| P611 | 492.2 | 2.03 | 8.04 | 3.95 | 9.19 | 42.75 | 1.82 | 5.21 | 5.01 | 7.45 | 9.25 |
| P601 | 510.6 | 2.13 | 8.07 | 2.06 | 8.60 | 44.50 | 2.38 | 4.56 | 3.63 | 6.30 | 26.25 |
| P490 | 511.6 | 2.72 | 4.74 | 3.91 | 6.72 | 12.25 | 1.93 | 2.06 | 2.98 | 4.10 | 16.00 |
5. Conclusions
- (1)
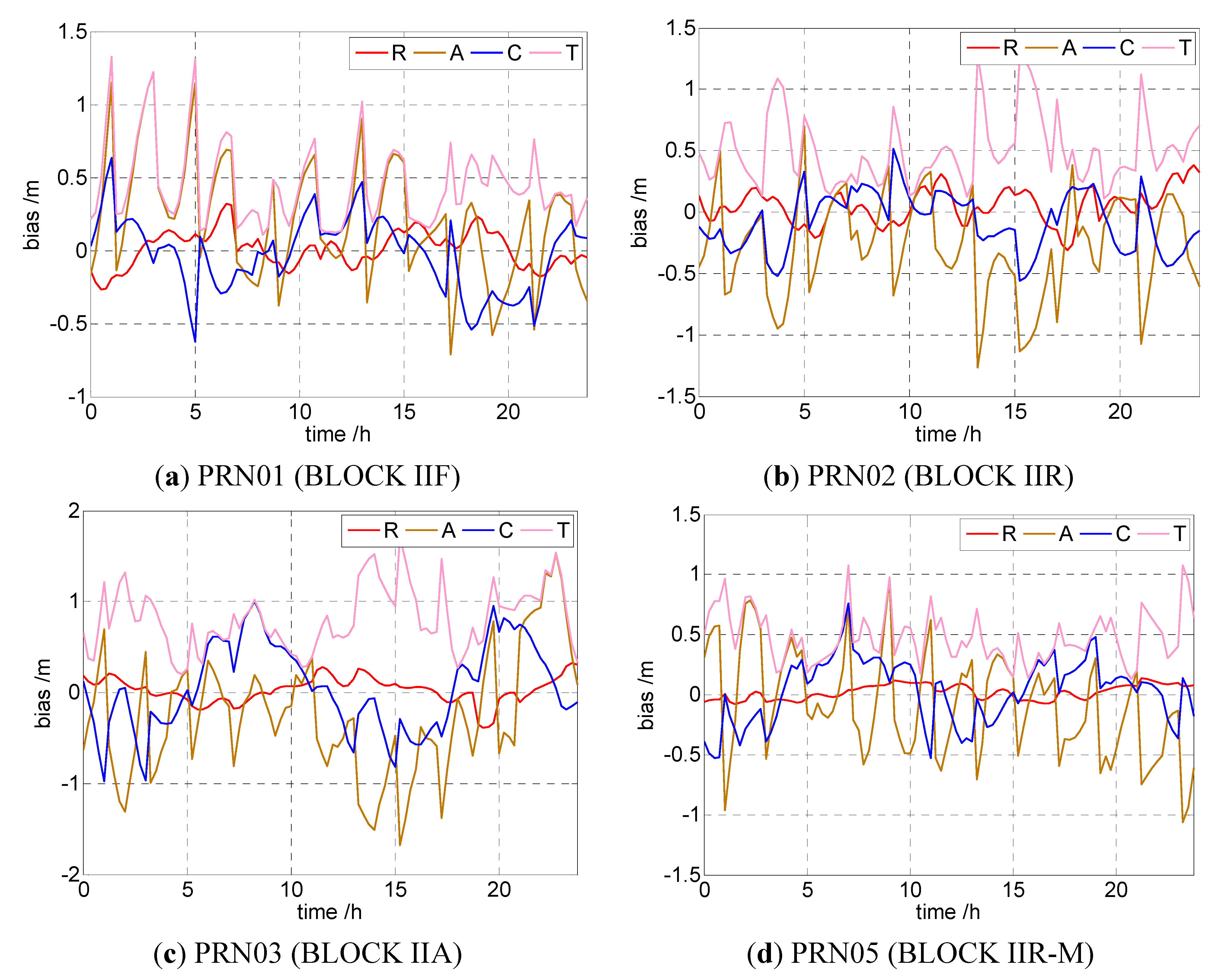
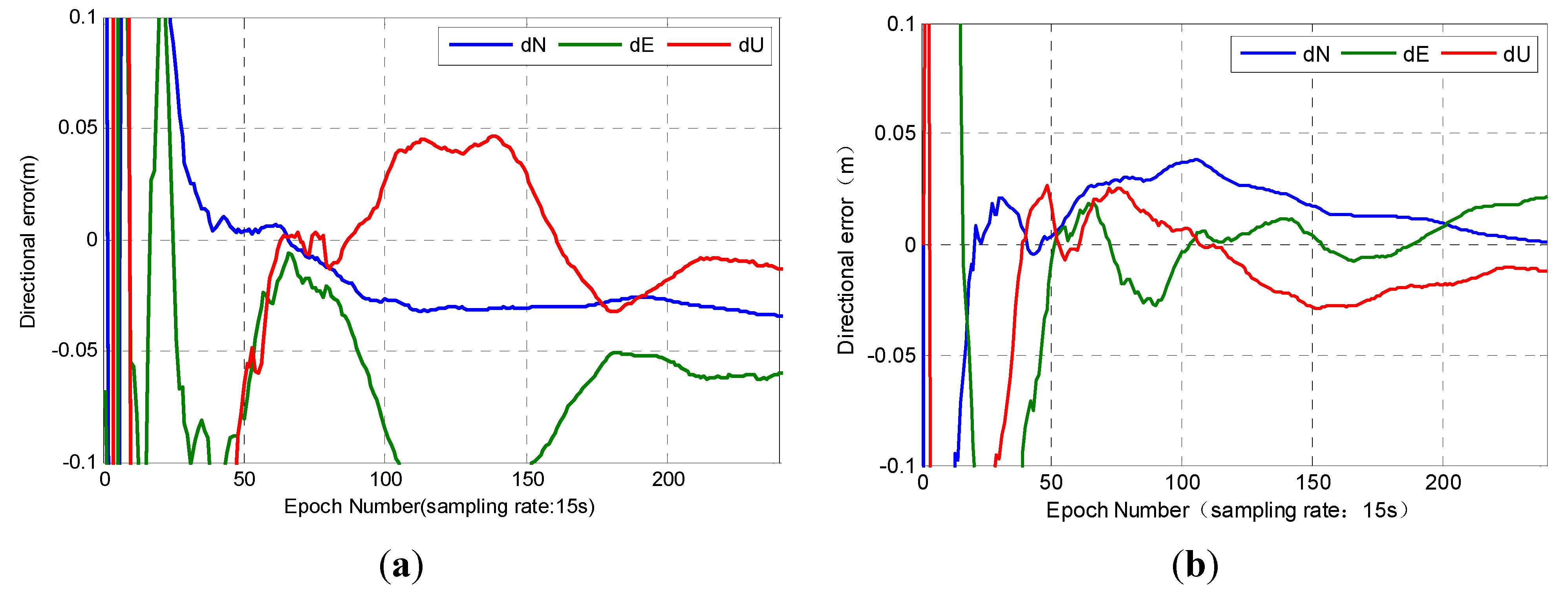
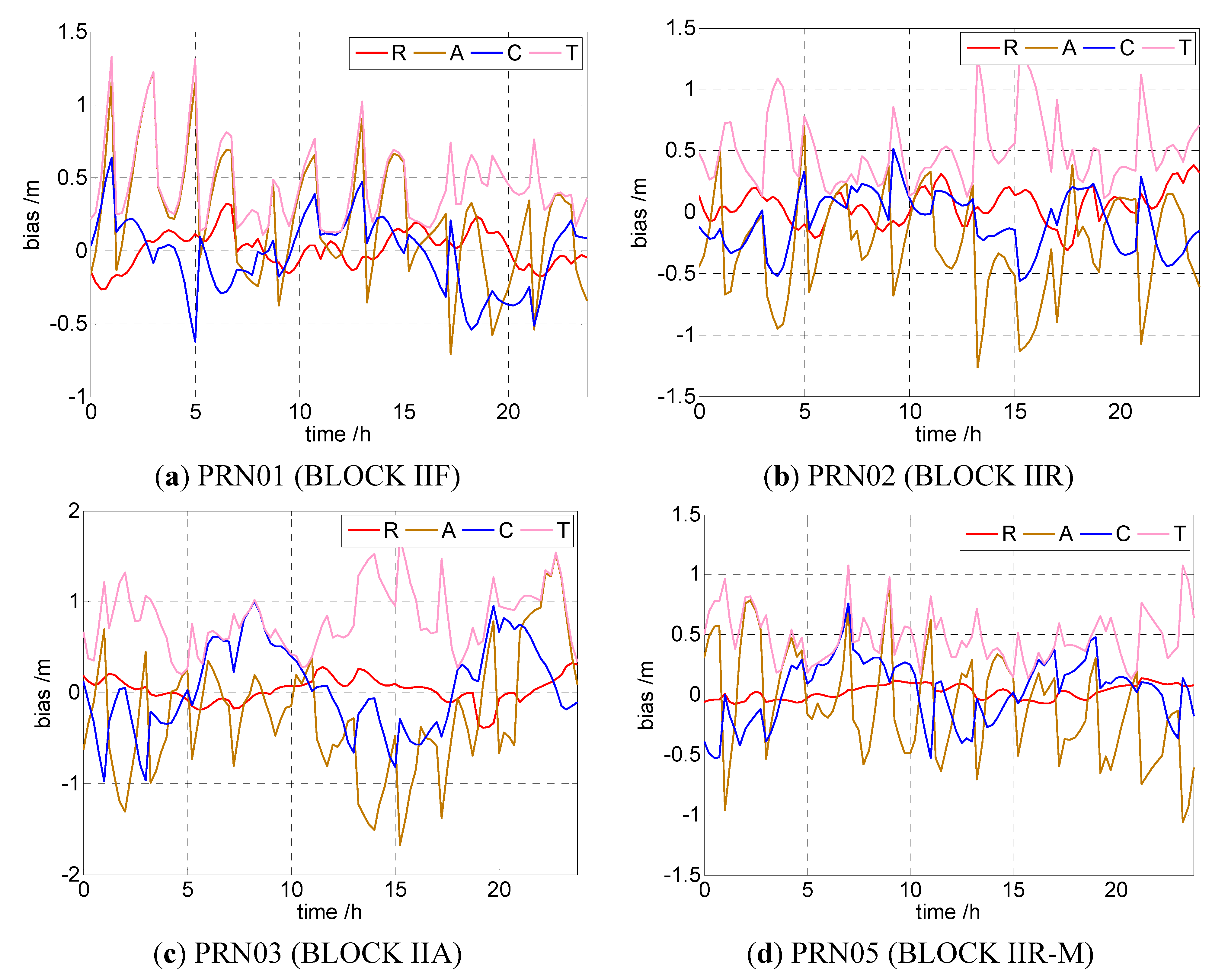
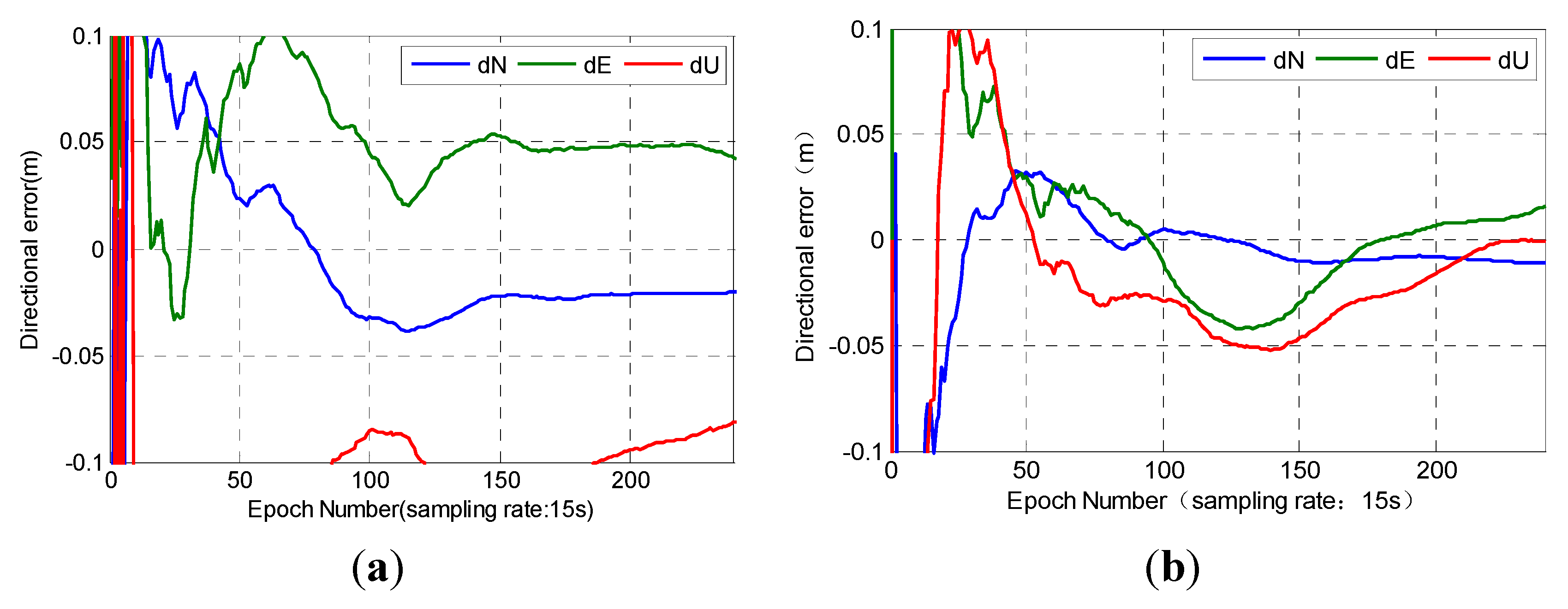
- The projection of satellite orbit error was similar to the clock bias on PPP; hence, they can be coupled as one parameter for estimation purposes. During PPP by the user, the OMC vectors of GNSS equations by coupling estimation were almost the same as the traditional PPP (with a difference in millimeters). Therefore, the orbit error was availably absorbed by clock bias, whereas the residual unabsorbed orbit error did not affect the positioning in a regional area.
- (2)
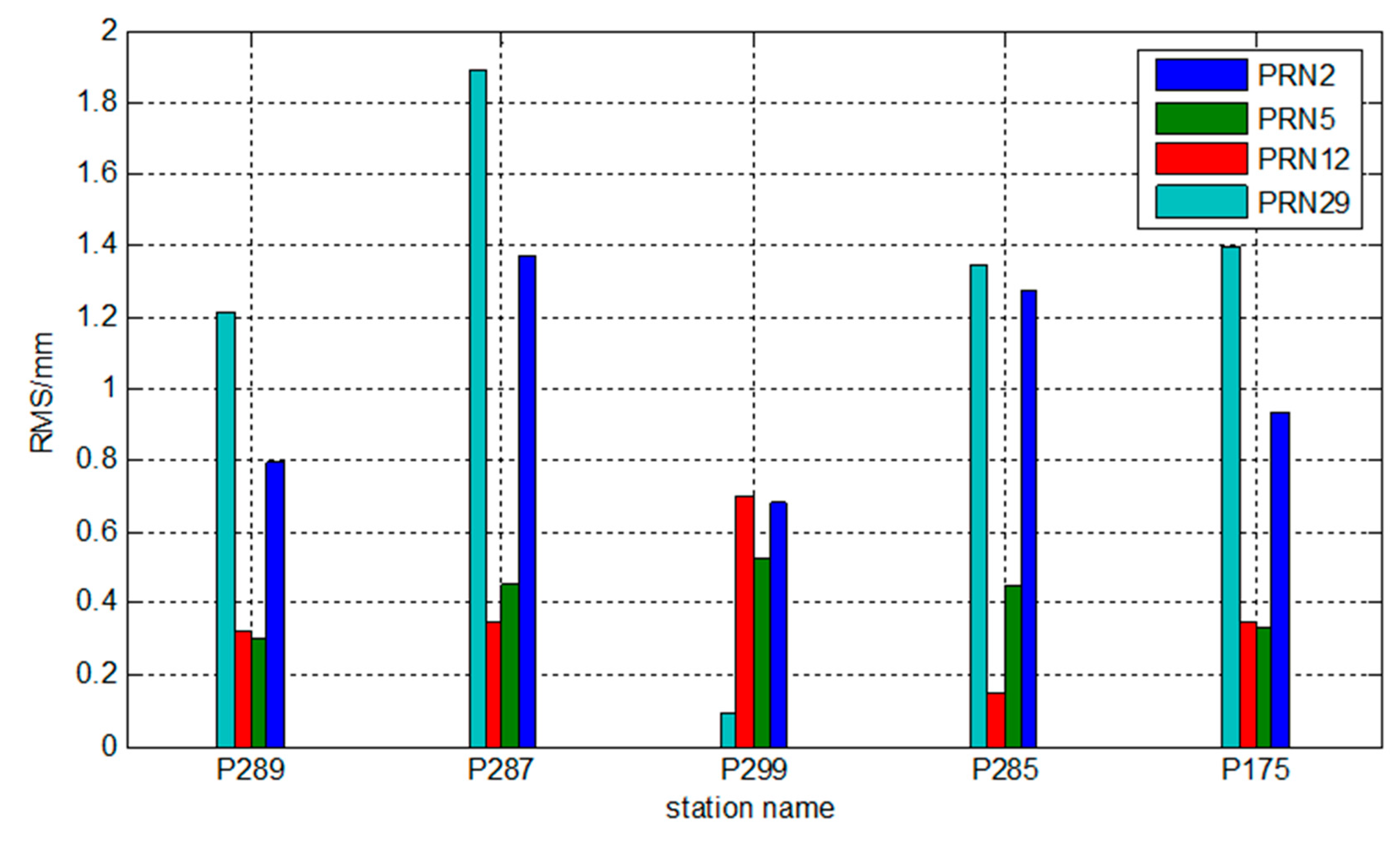
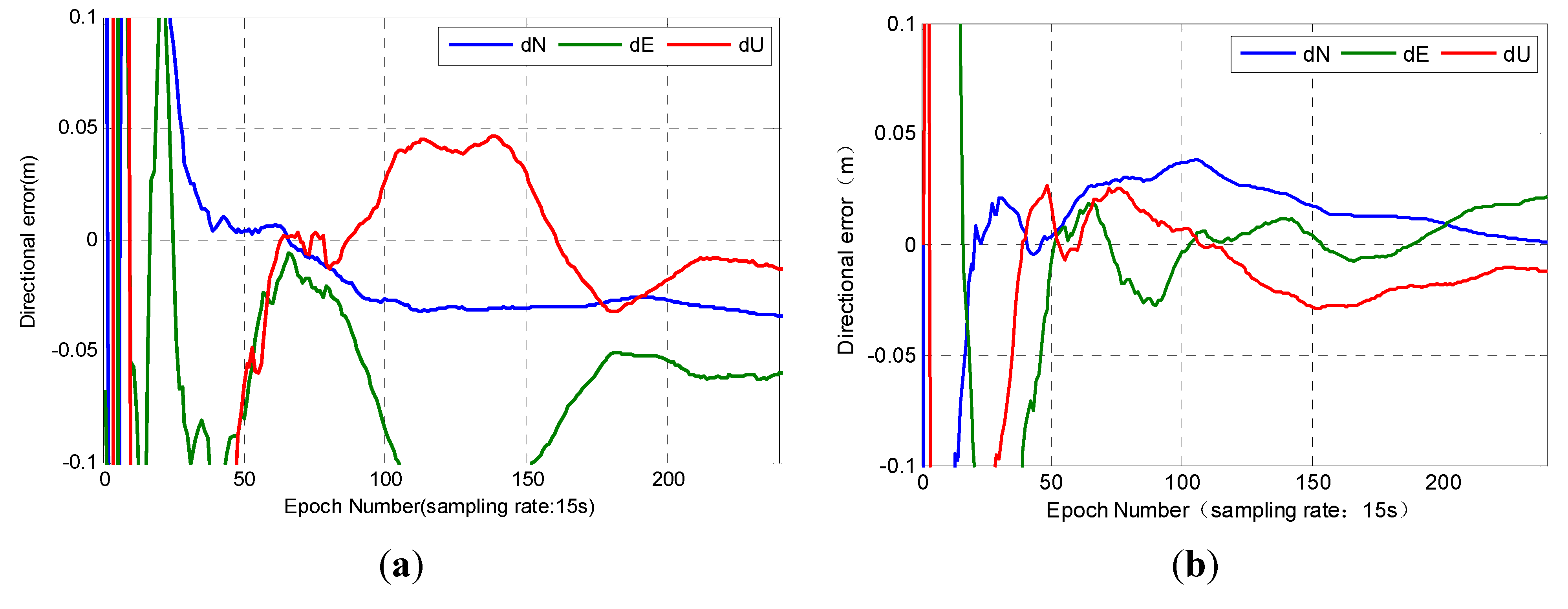
- For the stations inside and outside (with a distance less than 500 km) the network, the proposed approach performs better than RSDI. The position accuracy of the stations inside and outside the network improves by 38.8% and 36.1%, respectively, and the convergence speed improves by 61.4% and 65.9%, respectively. This new approach has the advantages of autonomy, real-time processes, and simple parameters, which is an improvement over traditional PPP. It could be an alternative solution for regional positioning service before global PPP service comes into operation.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Jefferson, M.M.; Watkins, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. Solid Earth (1978–2012) 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Kouba, J.; Héroux, P. Precise point positioning using IGS orbit and clock products. GPS Solut. 2001, 5, 12–28. [Google Scholar] [CrossRef]
- Bisnath, S.; Gao, Y. Precise point positioning. GPS World 2009, 20, 43–50. [Google Scholar]
- Li, Z.; Zhang, X. New Techniques and Precise Data Processing Methods of Satellite Navigation and Positioning; Wuhan University Press: Wuhan, China, 2009; pp. 6–15. [Google Scholar]
- Dow, J.M.; Neilan, R.E.; Rizos, C. The International GNSS Service in a changing landscape of Global Navigation Satellite Systems. J. Geod. 2009, 83, 191–198. [Google Scholar] [CrossRef]
- Kouba, J.; Springer, T. New IGS station and satellite clock combination. GPS Solut. 2001, 4, 31–36. [Google Scholar] [CrossRef]
- Dach, R.; Brockmann, E.; Schaer, S.; Beutler, G.; Meindl, M.; Prange, L.; Bock, H.; Jäggi, A.; Ostini, L. GNSS processing at CODE: Status report. J. Geod. 2009, 83, 353–365. [Google Scholar] [CrossRef]
- Li, X.; Ge, M.; Lu, C.; Zhang, Y. High-Rate GPS Seismology Using Real-Time Precise Point Positioning With Ambiguity Resolution. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6165–6180. [Google Scholar]
- Li, X.; Ge, M.; Zhang, H.; Wickert, J. A method for improving uncalibrated phase delay estimation and ambiguity-fixing in real-time precise point positioning. J. Geod. 2013, 87, 405–416. [Google Scholar] [CrossRef]
- Weber, G.; Mervart, L.; Lukes, Z.; Rocken, C. Real-time clock and orbit corrections for improved point positioning via NTRIP. In Proceedings of ION GNSS 20th International Technical Meeting of the Satellite Division, Fort Worth, TX, USA, 25–28 September 2007.
- Elsobeiey, M.; Al-Harbi, S. Performance of real-time Precise Point Positioning using IGS real-time service. GPS Solut. 2015. [Google Scholar] [CrossRef]
- Leandro, R.; Landau, H.; Nitschke, M.; Glocker, M.; Seeger, S.; Chen, X.; Deking, A.; BenTahar, M.; Zhang, F.; Ferguson, K.; et al. RTX positioning: The next generation of cm-accurate real-time GNSS positioning. ION GNSS 2011, 1460–1475. [Google Scholar]
- He, F.; Gao, C.; Pan, S. Precision analysis of predicted orbit on IGU real-time precise ephemeris. J. Southeast Univ. (Nat. Sci. Ed.) 2013, 43, 384–387. [Google Scholar]
- Xu, A.; Xu, Z.; Sui, X. The Influence of Satellite Orbit and Clock Offset on the Accuracy of Precise Point Positioning. Bull. Surv. Mapp. 2013, 5, 1–4. [Google Scholar]
- Gao, C.; Gao, W.; He, F. Research and testing of GPS Real-time precise point positioning. J. Southeast Univ. (Nat. Sci. Ed.) 2013, 43, 230–234. [Google Scholar]
- Ge, M.; Gendt, G.; Rothacher, M; Shi, C.; Liu, J. Resolution of GPS carrier-phase ambiguities in precise point positioning (PPP) with daily observations. J. Geodesy 2008, 82, 389–399. [Google Scholar] [CrossRef]
- Montenbruck, O.; Gill, E.; Kroes, R. Rapid orbit determination of LEO satellites using IGS clock and ephemeris products. GPS Solut. 2005, 9, 226–235. [Google Scholar] [CrossRef]
- Yan, W.; Ou, J.; Yuan, Y. Research on Network Augmented Real-time Precise Point Positioning Algorithm with Broadcast Ephemeris. Geomat. Inf. Sci. Wuhan Univ. 2012, 37, 1190–1193. [Google Scholar]
- Ge, M.; Chen, J.; Douša, J.; Gendt, G.; Wickert, J. A computationally efficient approach for estimating high-rate satellite clock corrections in realtime. GPS Solut. 2012, 16, 9–17. [Google Scholar] [CrossRef]
- Zhang, X.; Li, X.X.; Guo, F. Satellite clock estimation at 1 Hz for realtime kinematic PPP applications. GPS Solut. 2011, 15, 315–324. [Google Scholar] [CrossRef]
- Yi, C. Research on Theory and Application of Real Time Precise Point Positioning. Ph.D. Thesis, Central South University, ChangSha, China, 2011. [Google Scholar]
- Hauschild, A. Precise GNSS clock-estimation for real-time navigation and Precise Point Positioning. Ph.D. Thesis, Technical University of Munich, Monique, Germany, 2010. [Google Scholar]
- Zhang, B.; Teunissen, P.J.G.; Odijk, D. A novel un-differenced PPP-RTK concept. J. Navig. 2011, 64, S180–S191. [Google Scholar] [CrossRef]
- Zhang, B. Study on the Theoretical Methodology and Applications of Precise Point Positioning Using Un-Differenced and Uncombined GNSS Data. Ph.D. Thesis, Graduate University of Chinese Academy of Sciences, Wuhan, China, 2012. [Google Scholar]
- Global Positioning Systems Directorate System Engineering & Integration Interface Specification IS-GPS-705. Available online: http://www.gps.gov/technical/icwg/ (accessed on 20 May 2015).
- Lou, Y.; Zhang, W.; Wang, C.; Yao, X.; Shi, C.; Liu, J. The impact of orbital errors on the estimation of satellite clock errors and PPP. Adv. Space Res. 2014, 54, 1571–1580. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, S.; Chen, W.; Jin, X.; Shi, X.; He, F. Real-Time PPP Based on the Coupling Estimation of Clock Bias and Orbit Error with Broadcast Ephemeris. Sensors 2015, 15, 17808-17826. https://doi.org/10.3390/s150717808
Pan S, Chen W, Jin X, Shi X, He F. Real-Time PPP Based on the Coupling Estimation of Clock Bias and Orbit Error with Broadcast Ephemeris. Sensors. 2015; 15(7):17808-17826. https://doi.org/10.3390/s150717808
Chicago/Turabian StylePan, Shuguo, Weirong Chen, Xiaodong Jin, Xiaofei Shi, and Fan He. 2015. "Real-Time PPP Based on the Coupling Estimation of Clock Bias and Orbit Error with Broadcast Ephemeris" Sensors 15, no. 7: 17808-17826. https://doi.org/10.3390/s150717808