
Impact of Data Processing and Antenna Frequency on Spatial Structure Modelling of GPR Data

Abstract
:1. Introduction
2. Experimental Section
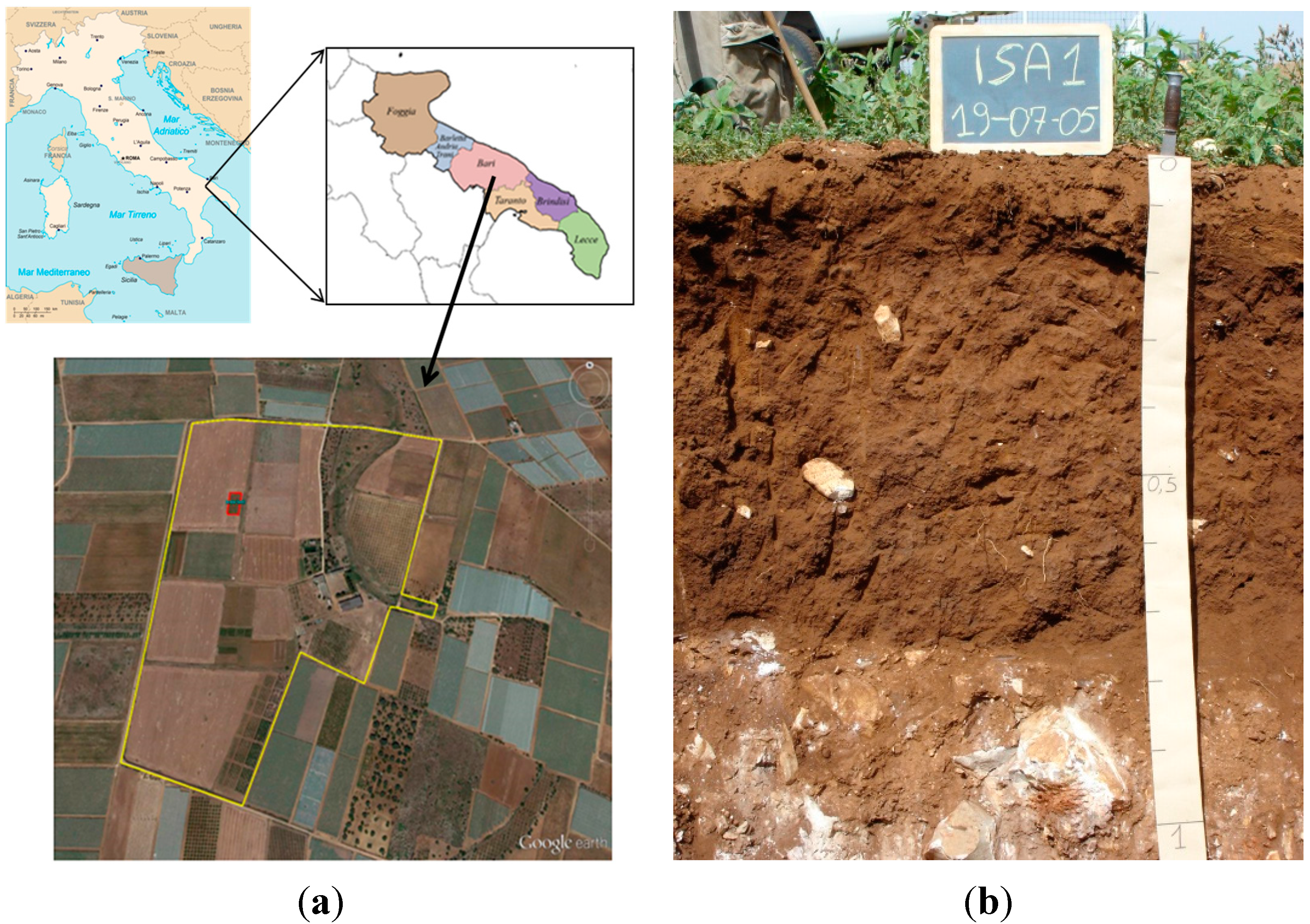
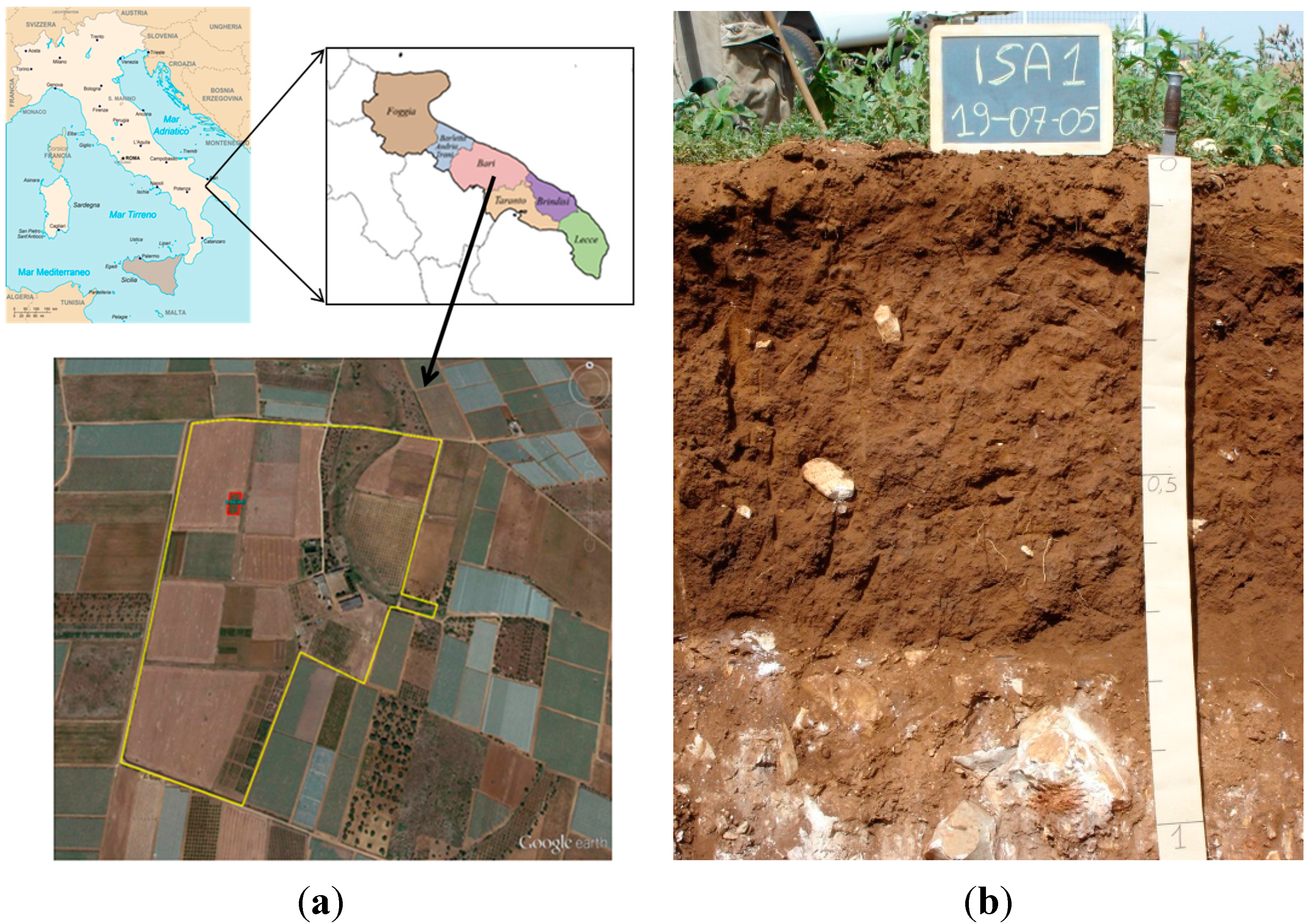
2.1. Description of the Field Site and Mapping Protocol
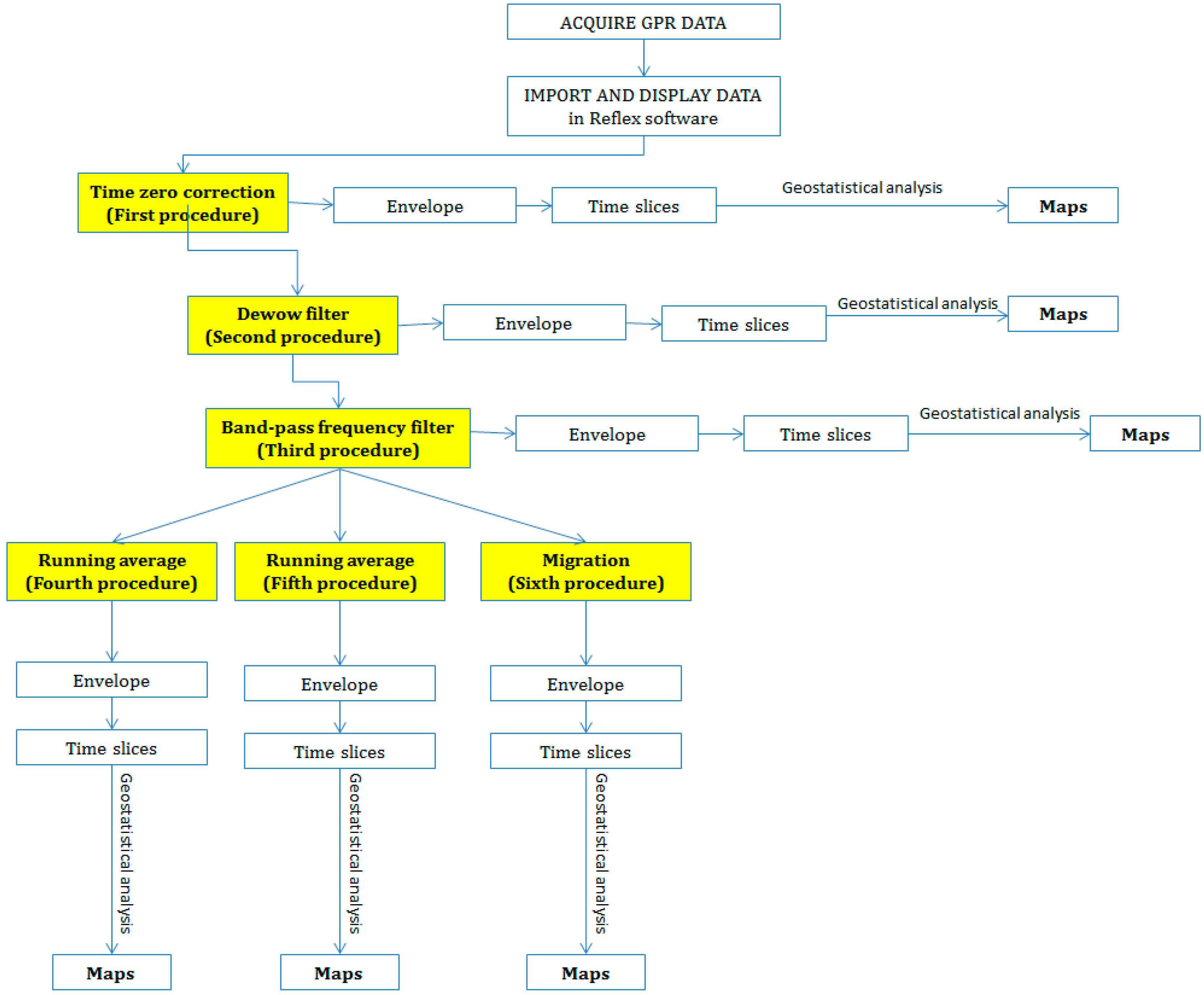
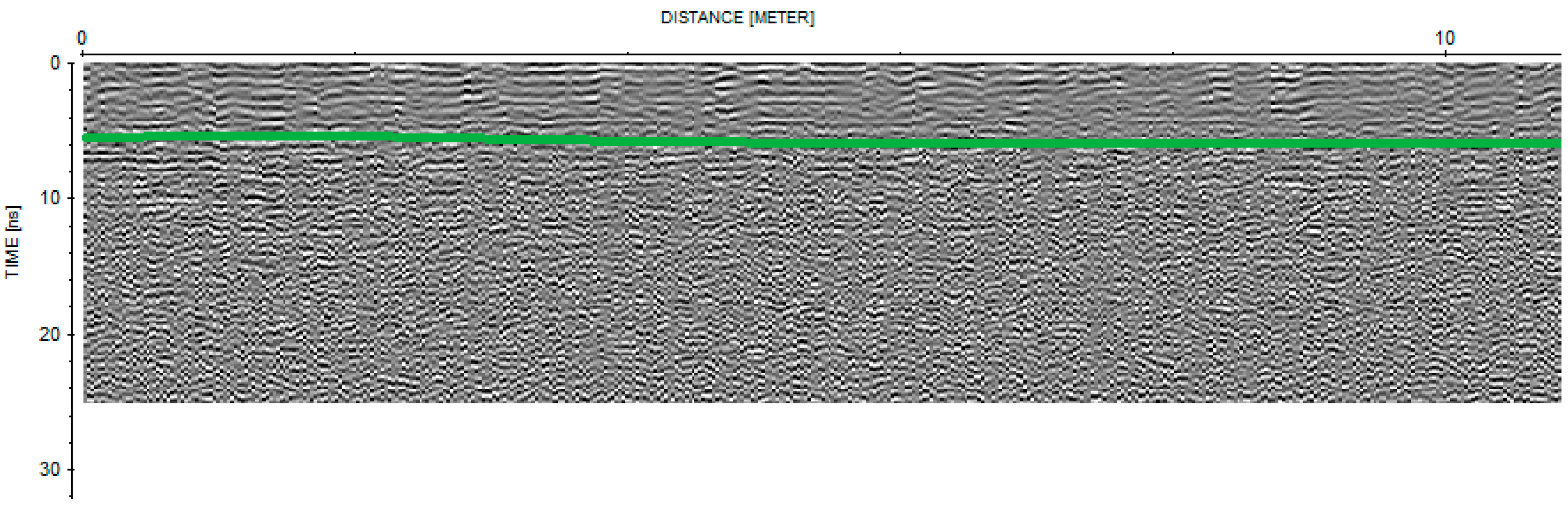
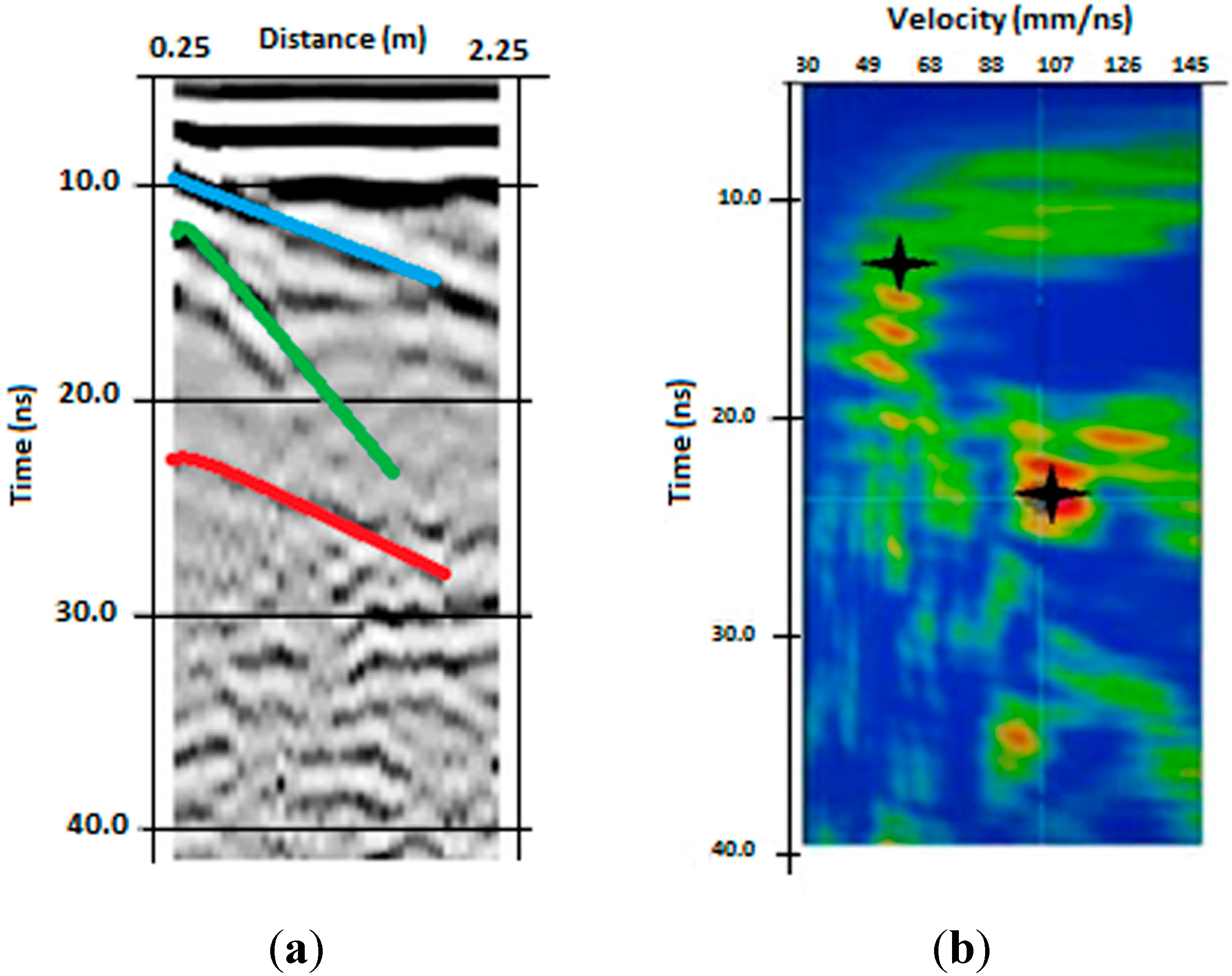
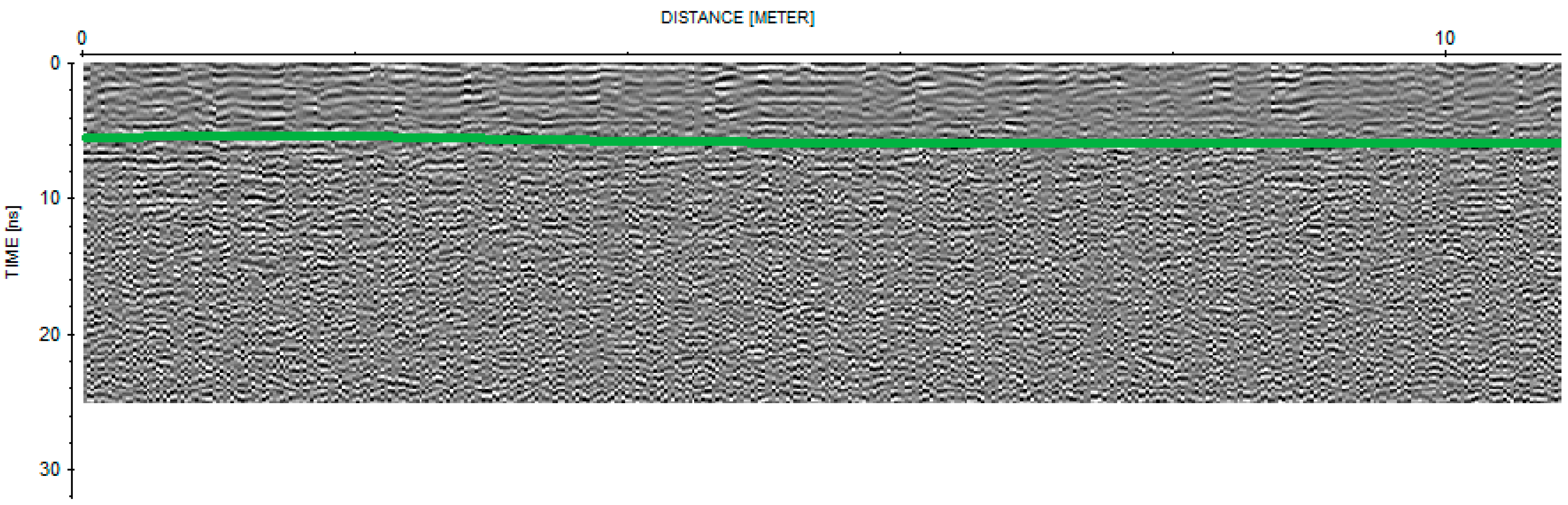
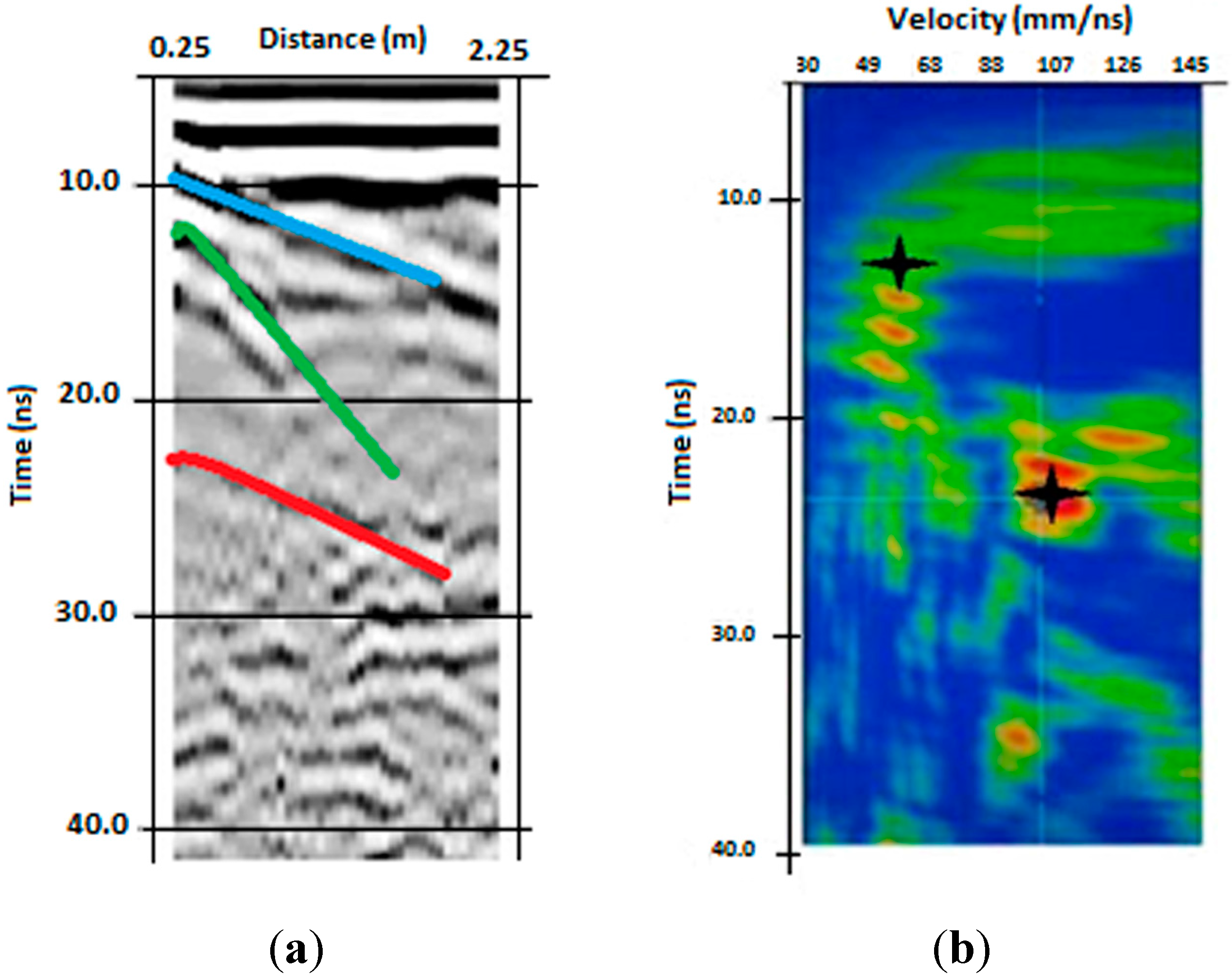
2.2. GPR Data Processing


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Process | 250 MHz | 600 MHz | 1600 MHz |
|---|---|---|---|
| Time zero | 22.76 ns | 2.56 ns | 3 ns |
| Dewow | 4 ns | 1.6 ns | 0.6 ns |
| Bandpass frequency | 100–200–300–400 MHz | 300–550–650–900 MHz | 1300–1550–1650–1900 MHz |
| Simple running average | 10 traces 20 traces | 20 traces 40 traces | 20 traces 40 traces |
| Migration | Mean velocity = 0.06 mns−1 up to 10 ns Mean velocity = 0.1 mns−1 after 10 ns | Mean velocity = 0.06 mns−1 up to 10 ns Mean velocity = 0.1 mns−1 after 10 ns | Mean velocity = 0.06 mns−1 |
2.3. Geostatistical Methodology
2.4. Comparison between the Maps
3. Results and Discussion
3.1. First Visual Interpretation
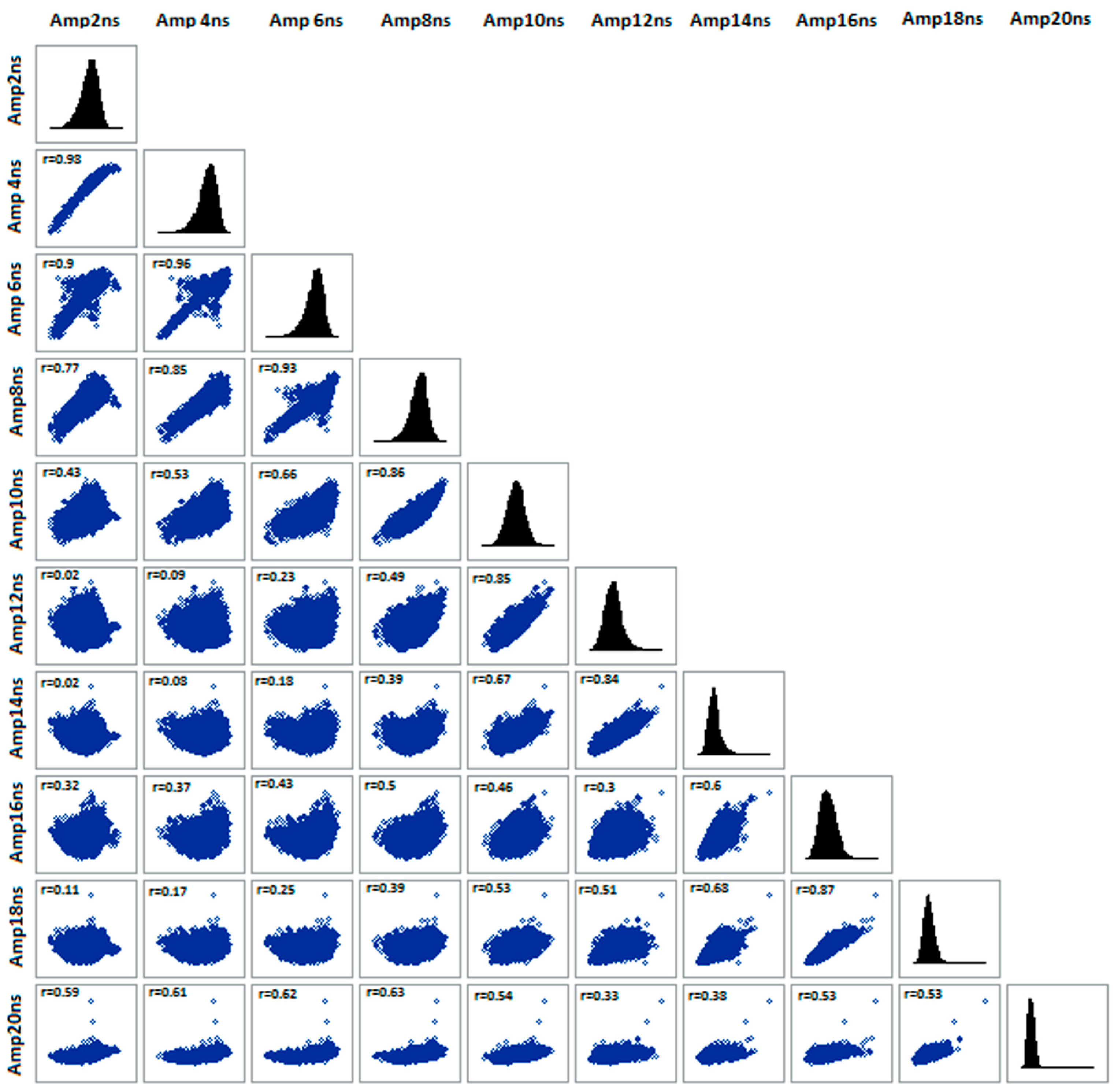
3.2. Statistical Analysis of Data

3.3. Geostatistical Results
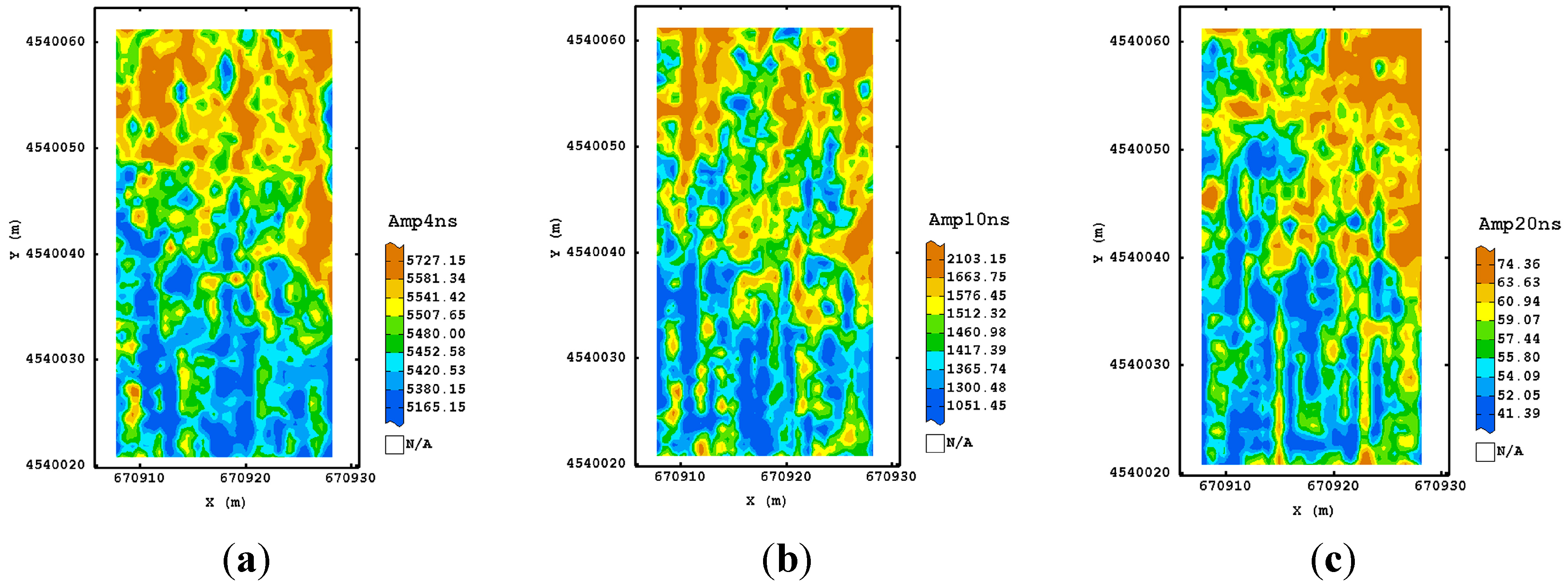
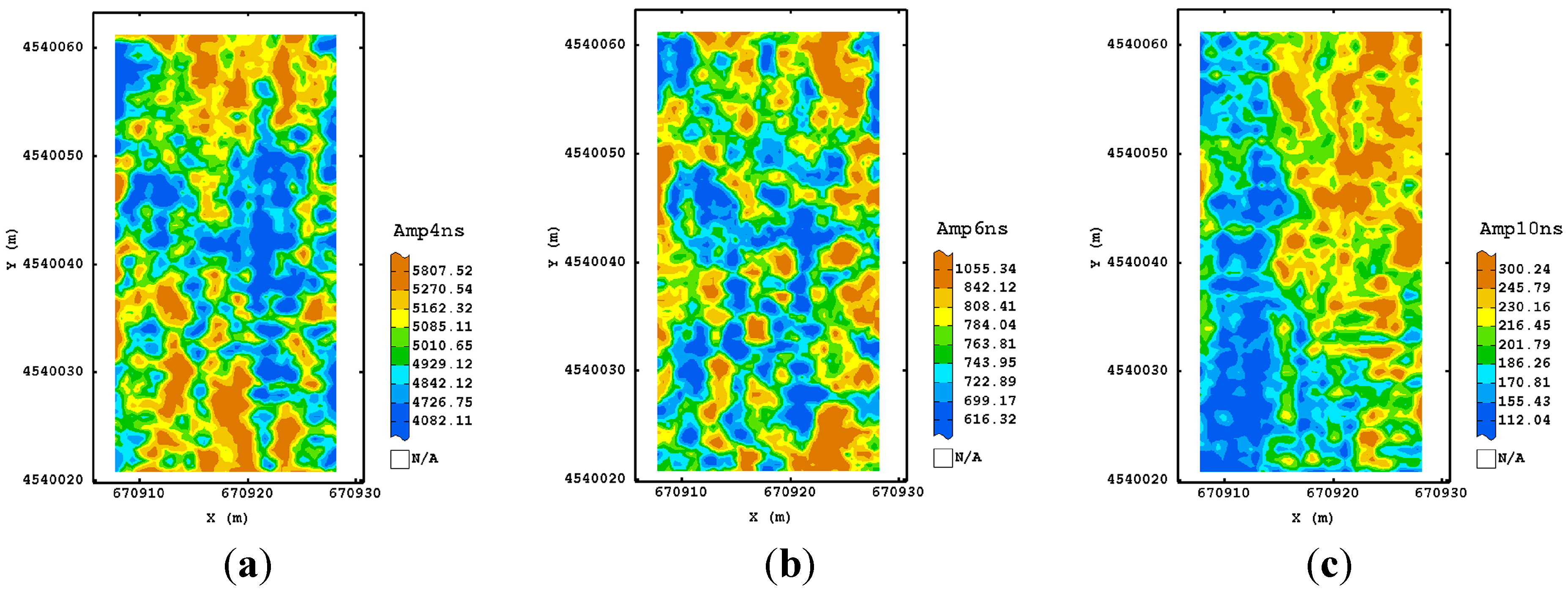
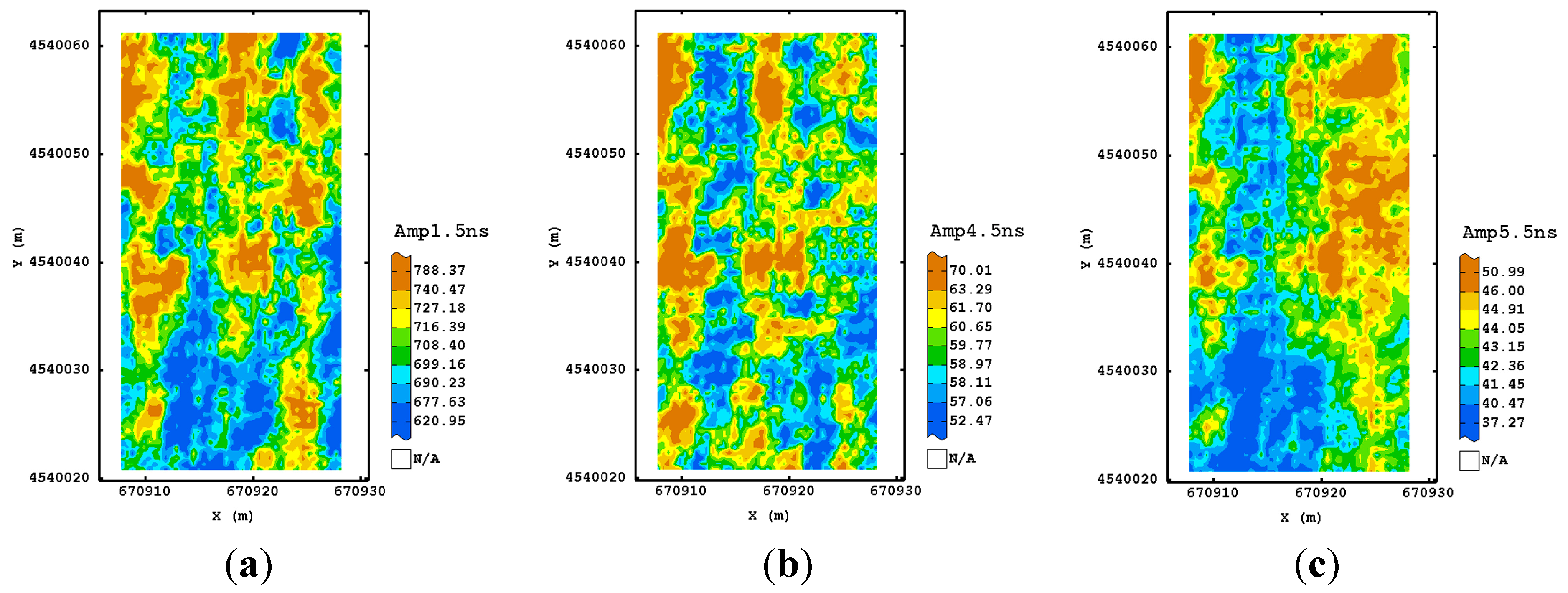
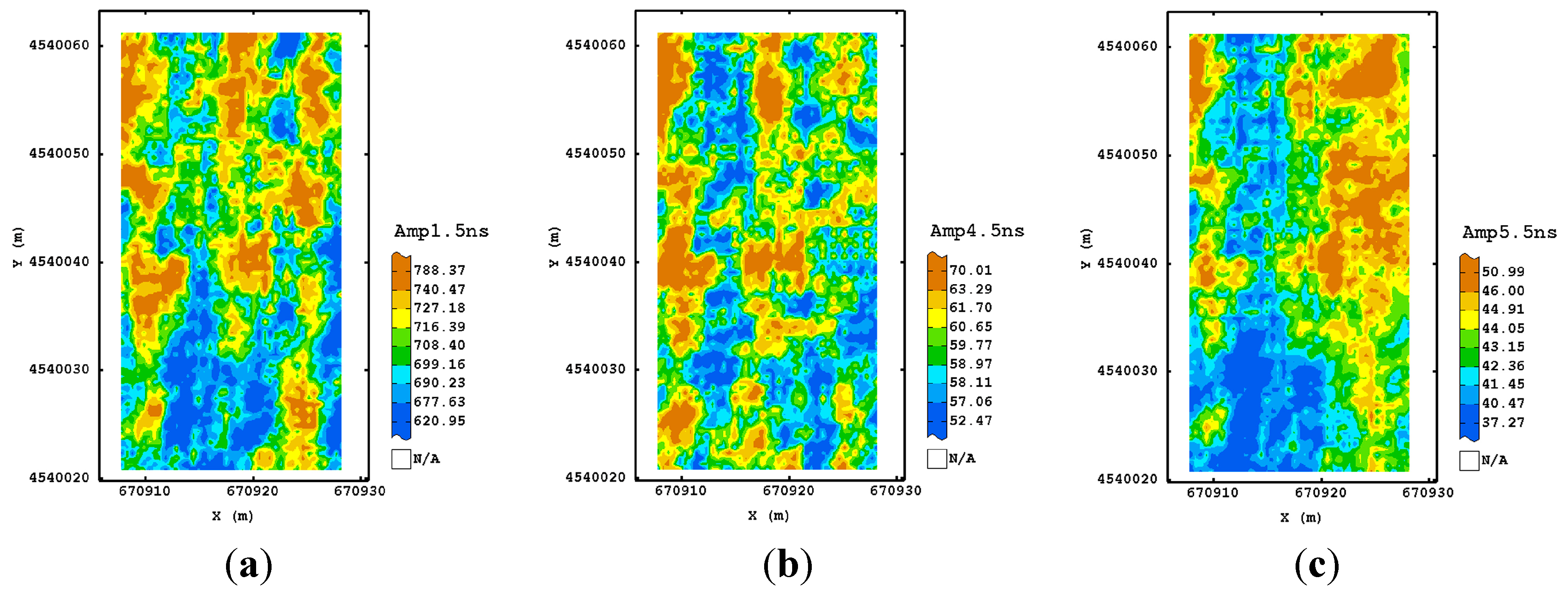
3.3.1. Visual Interpretation of the Estimated Maps

3.3.2. Quantification of Measurement Error
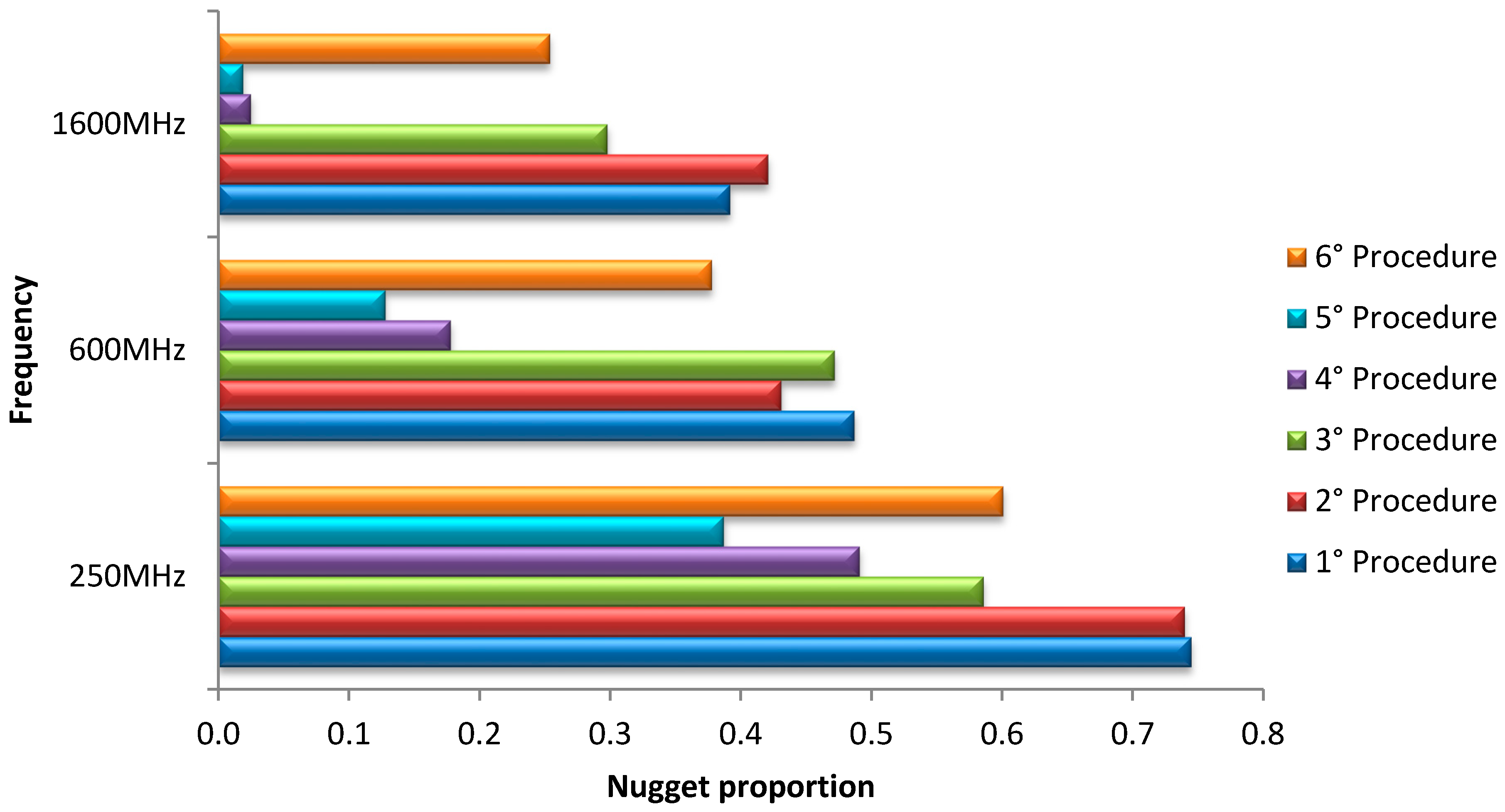
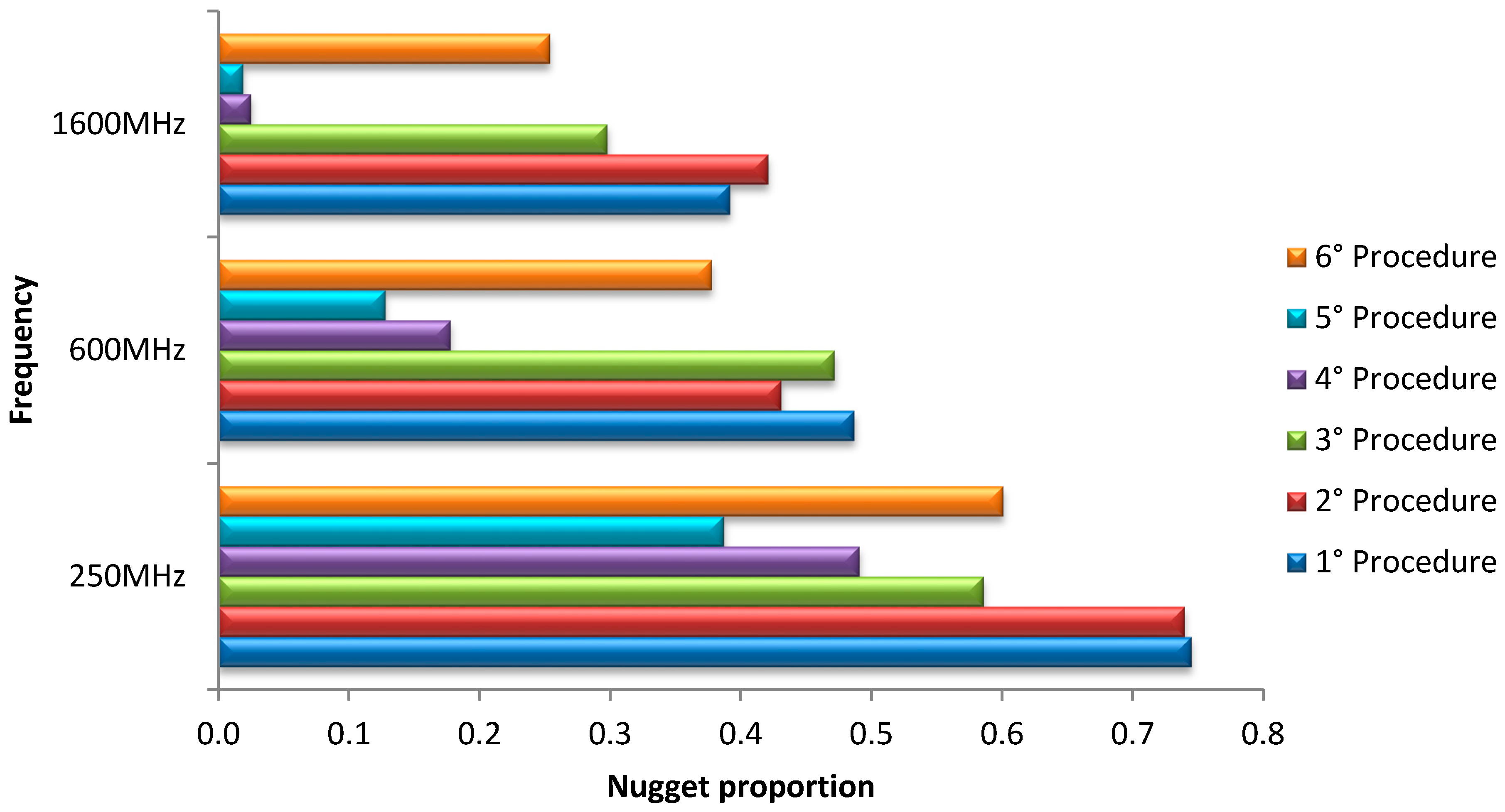
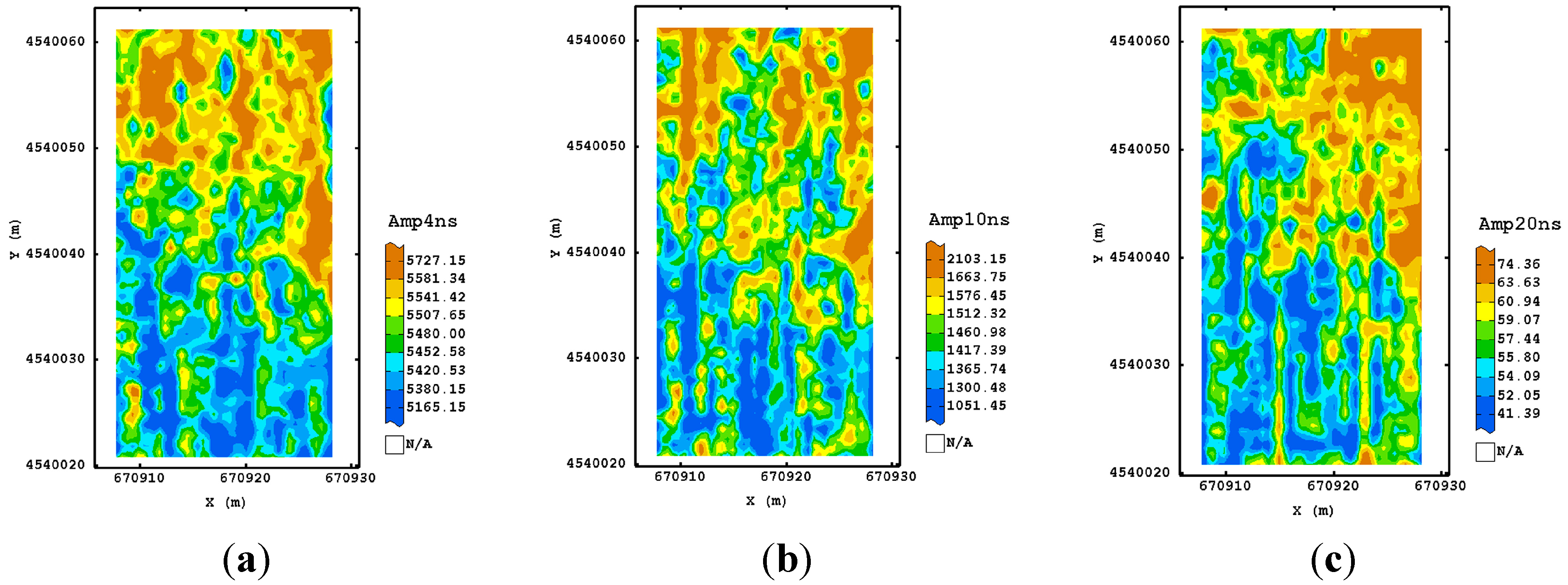
3.4. Comparison among the Different Processing Procedures: Results
| Amp10 ns | Overall Accuracy | Weighted Kappa Coefficient | ||
|---|---|---|---|---|
| 3rd procedure–1st procedure | 0.58 | 0.83 | 95% Lower 95% Upper | 0.8205 0.8407 |
| 3rd procedure–2nd procedure | 0.60 | 0.85 | 95% Lower 95% Upper | 0.8451 0.8612 |
| 3rd procedure–4th procedure | 0.319 | 0.73 | 95% Lower 95% Upper | 0.7206 0.7431 |
| 3rd procedure–5th procedure | 0.352 | 0.69 | 95% Lower 95% Upper | 0.6808 0.7059 |
| 3rd procedure–6th procedure | 0.308 | 0.61 | 95% Lower 95% Upper | 0.6012 0.6314 |
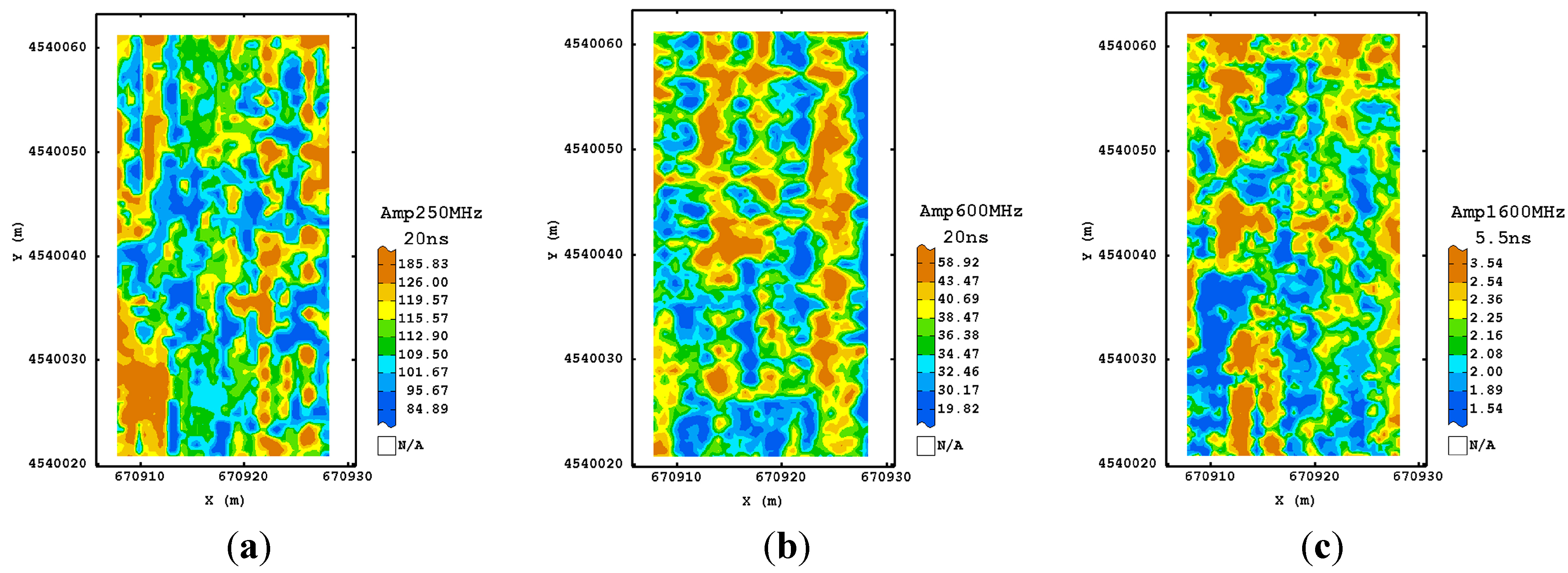
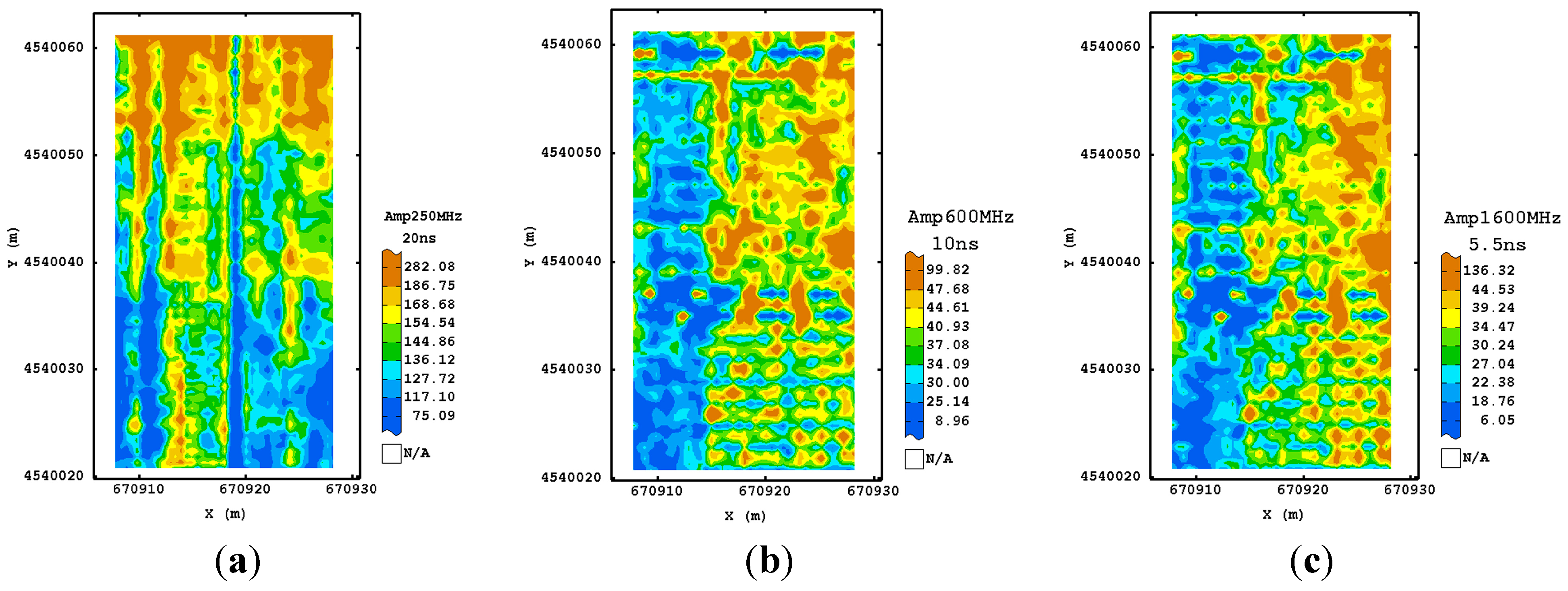
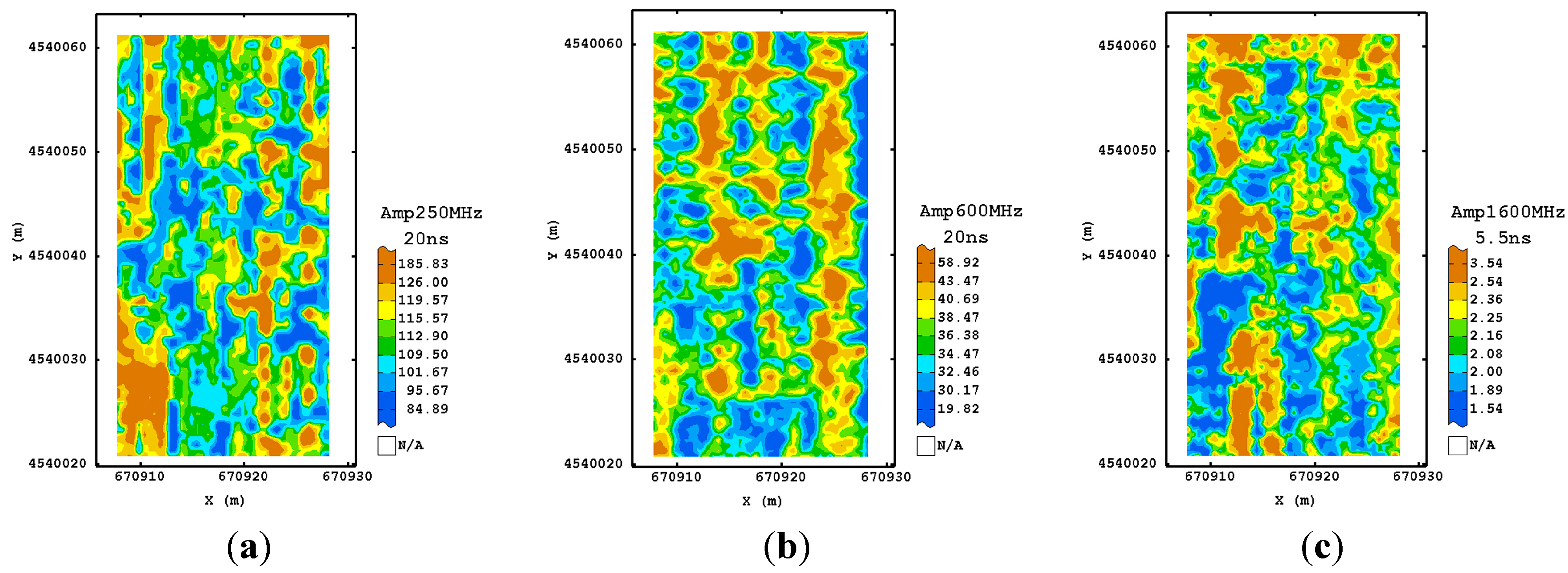
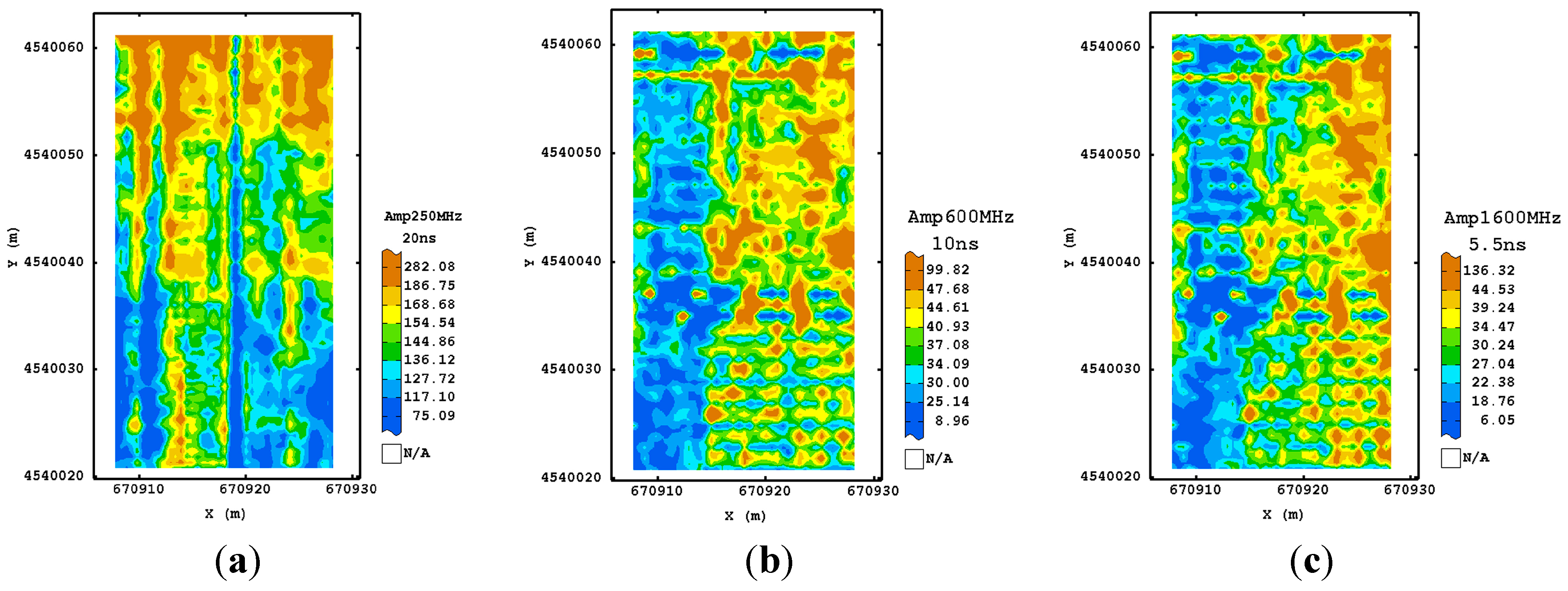
3.5. Comparison among the Different Antenna Frequencies: Results
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Robinson, D.A.; Campbell, C.S.; Hopmans, J.W.; Hornbuckle, B.K.; Jones, S.B.; Knight, R.; Ogden, F.; Selker, J.; Wendroth, O. Soil moisture measurement for ecological and hydrological watershed-scale observatories: A review. Vadose Zone J. 2008, 7, 358–389. [Google Scholar] [CrossRef]
- Vereecken, H.; Huisman, J.A.; Bogena, H.; Vanderborght, J.; Vrugt, J.A.; Hopmans, J.W. On the value of soil moisture measurements in vadose zone hydrology: A review. Water Resour. Res. 2008, 44. [Google Scholar] [CrossRef]
- Grote, K.; Hubbard, S.; Rubin, Y. Field-scale estimation of volumetric water content using ground-penetrating radar ground wave techniques. Water Resour. Res. 2003, 39, 1321–1335. [Google Scholar] [CrossRef]
- Lunt, I.A.; Hubbard, S.S.; Rubin, U. Soil moisture estimation using ground-penetrating radar reflection data. J. Hydrol. 2005, 307, 254–269. [Google Scholar] [CrossRef]
- Galagedara, L.W.; Parkin, G.W.; Redman, J.D.; von Bertoldi, P.; Endres, A.L. Field studies of the GPR ground wave method for estimating soil water content during irrigation and drainage. J. Hydrol. 2005, 301, 182–197. [Google Scholar] [CrossRef]
- Weihermüller, L.; Huisman, J.A.; Lambot, S.; Herbst, M.; Vereecken, H. Mapping the spatial variation of soil water content at the field scale with different ground penetrating radar techniques. J. Hydrol. 2007, 340, 205–216. [Google Scholar] [CrossRef]
- Davis, J.L.; Annan, A.P. Ground-penetrating radar for high-resolution mapping of soil and rock stratigraphy. Geophys. Prospect. 1989, 37, 531–551. [Google Scholar] [CrossRef]
- Knight, R. Ground penetrating radar for environmental applications. Annu. Rev. Earth Planet. Sci. 2001, 29, 299–255. [Google Scholar] [CrossRef]
- Knight, R.; Rea, J.; Tercier, P. Geostatistical analysis of ground penetrating radar data, a means of characterizing the correlation structure of sedimentary units. Available online: http://onlinelibrary.wiley.com/doi/10.1029/97WR03070/pdf (accessed on 6 July 2015).
- Rea, J.; Knight, R. Geostatistical analysis of ground-penetrating radar data: A means of describing spatial variation in the subsurface. Water Resour. Res. 1998, 34, 329–339. [Google Scholar] [CrossRef]
- Oldenborger, G.A.; Knoll, M.D.; Barrash, W. Effects of signal processing and antenna frequency on the geostatistical structure of ground penetrating radar data. J. Environ. Eng. Geophys. 2004, 9, 201–212. [Google Scholar] [CrossRef]
- Tamba, R. Testing the Use of Geostatistics to Improve Data Visualization. Case Study on GPR Survey of Tarragona’s Cathedral. Archaeol. Prospect. 2012, 19, 167–178. [Google Scholar] [CrossRef]
- Conyers, L.B.; Goodman, D. Ground Penetrating Radar: An Introduction for Archaeologists; Altamira Press: London, UK, 1997. [Google Scholar]
- Soil Survey Staff. Keys to Soil Taxonomy, 11th ed.; USDA-Natural Resources Conservation Service: Washington, DC, USA, 2010. [Google Scholar]
- IUSS Working Group WRB. World Reference Base for Soil Resources 2006, First Update 2007; World Soil Resources Reports No. 103; FAO: Rome, Italy, 2007. [Google Scholar]
- De Benedetto, D.; Castrignanò, A.; Sollitto, D.; Modugno, F.; Buttafuoco, G.; lo Papa, G. Integrating geophysical and geostatistical techniques to map the spatial variation of clay. Geoderma 2012, 171–172, 53–63. [Google Scholar] [CrossRef]
- Quarto, R.; Schiavone, D.; Diaferia, I. Ground penetrating radar of a prehistoric site in southern Italy. J. Archaeol. Sci. 2007, 34, 2071–2080. [Google Scholar] [CrossRef]
- Daniels, D.J.; Gunton, D.J.; Scott, H.F. Introduction to subsurface radar. IEE Proc. 1988, 135, 278–316. [Google Scholar] [CrossRef]
- Google Earth 2014. Available online: https://www.google.it/intl/en/earth/ (accessed on 7 July 2015).
- Sandmeier Scientific Software. REFLEX Software Manual, Sandmeier Scientific Software: Karlsruhe, Germany, 2010.
- Reynolds, J.M. An Introduction to Applied and Environmental Geophysics; John Wiley and Sons Ltd.: Chichester, UK, 1997. [Google Scholar]
- Cassidy, N.J. Ground penetrating radar data. Processing, modelling and analysis. In Ground Penetrating Radar: Theory and Applications; Jol, H.M., Ed.; Elsevier Science: Amsterdam, The Netherlands, 2009. [Google Scholar]
- Yilmaz, O. Seismic Data Analysis: Processing, Inversion and Interpretation of Seismic Data; (Investigations in Geophysics Series No. 10); Society of Exploration Geophysicists: Tulsa, OK, USA, 2001. [Google Scholar]
- Claerbout, J.F. Fundamentals of Geophysical Data Processing: With Applications to Petroleum Prospecting; Blackwell Scientific Publications: Palo, CA, USA, 1985. [Google Scholar]
- Goovaerts, P. Geostatistics for Natural Resources Evaluation (Applied Geostatistics Series); Oxford University Press: Oxford, UK, 1997; p. 483. [Google Scholar]
- Chilès, J.P.; Delfiner, P. Geostatistics: Modelling Spatial Uncertainty; Wiley: New York, NY, USA, 1999. [Google Scholar]
- Wackernagel, H. Multivariate Geostatistics: An Introduction with Applications; Springer-Verlag: Berlin, Germany, 2003. [Google Scholar]
- Journel, A.G.; Huijbregts, C.J. Mining Geostatistics; Academic Press: New York, NY, USA, 1978; p. 600. [Google Scholar]
- Rivoirard, J. Which models for collocated cokriging? J. Math. Geol. 2001, 33, 117–131. [Google Scholar] [CrossRef]
- Oliver, M.A.; Webster, R. A tutorial guide to geostatistics: Computing and modelling variograms and kriging. Catena 2014, 113, 56–69. [Google Scholar] [CrossRef]
- Geovariances. Isatis Technical Ref., Ver. 2014; Geovariances & Ecole des Mines de Paris: Avon Cedex, France, 2014; Available online: http://www.geovariances.com/en.
- Campbell, J. Introduction to Remote Sensing, 3rd ed.; The Guilford Press: New York, NY, USA, 2002. [Google Scholar]
- Cohen, J. A coefficient of agreement for nominal scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Fleiss, J.L. Statistical Methods for Rates and Proportions; Wiley: New York, NY, USA, 1981. [Google Scholar]
- SAS Institute Inc. SAS/STAT Software Release 9.3; SAS Institute Inc.: Cary, NC, USA, 2013. [Google Scholar]
- De Benedetto, D.; Castrignanò, A.; Sollitto, D.; Modugno, F. Spatial relationship between clay content and geophysical data. Clay Miner. 2010, 45, 197–207. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Benedetto, D.; Quarto, R.; Castrignanò, A.; Palumbo, D.A. Impact of Data Processing and Antenna Frequency on Spatial Structure Modelling of GPR Data. Sensors 2015, 15, 16430-16447. https://doi.org/10.3390/s150716430
De Benedetto D, Quarto R, Castrignanò A, Palumbo DA. Impact of Data Processing and Antenna Frequency on Spatial Structure Modelling of GPR Data. Sensors. 2015; 15(7):16430-16447. https://doi.org/10.3390/s150716430
Chicago/Turabian StyleDe Benedetto, Daniela, Ruggiero Quarto, Annamaria Castrignanò, and Domenico A. Palumbo. 2015. "Impact of Data Processing and Antenna Frequency on Spatial Structure Modelling of GPR Data" Sensors 15, no. 7: 16430-16447. https://doi.org/10.3390/s150716430