1. Introduction
GNSS is used worldwide, however, the performance of location-based services provided by receivers can still be compromised by interfering signals. There is an ever increasing attention to safe and secure applications. As an example, countless time tagging and synchronization systems in the telecom and electrical power grid industries relying primarily on GNSS signals are vulnerable to in-band electronic interference because of being extremely weak signals broadcasted over wireless channels. Therefore, even low-power interference can easily jam receivers within a radius of several km. Interference can dramatically degrade the performance of receivers or completely deny position and time services provided by these systems. The spread spectrum modulation technique applied in the structure of GNSS signals provides a certain degree of protection against narrowband interfering signals; however, the spreading gain alone is not sufficient to suppress high power or wideband interference signals.
Over the years, GNSS interference suppression methods based on time and frequency processing have been widely studied in the literature (e.g., [
1,
2]). Although they are effective for suppressing continuous wave (CW) or multi-tone jammers, their performance degrades when they deal with wideband interference signals (e.g., Gaussian jammers) or when interfering signals change rapidly in time and frequency such as swept continuous wave interference [
3].
On the contrary, interference mitigation techniques utilizing an antenna array can effectively detect and suppress both narrowband and wideband interfering signals regardless of their time and frequency characteristics. One of the earliest space-based processing methods has been referred to as the Capon beamformer, also called minimum variance distortionless response (MVDR) beamformer [
4,
5]. The MVDR beamformer has a distortionless response for the desired signal while suppressing all signals arriving from other directions. Antenna array processing in GNSS applications has been mostly centered on interference suppression [
6,
7,
8,
9,
10]. Reference [
10] drew the attention on utilizing minimum power distortionless response (MPDR) beamforming for GPS applications to reject interference signals whose power is significantly higher than that of the GPS signals. MPDR and MVDR beamformers have been considered popular methods for a variety of signal processing applications such as radar, wireless communications, and speech enhancement.
Despite the effectiveness of antenna array-based methods, they suffer from hardware complexity. In spatial processing, the number of antennas determines the number of interfering signals that can be suppressed. Limitations on the number of the antennas and size of the array can be considered the main practical challenge of these methods. To deal with this problem, techniques employing both time/frequency and spatial domain processing have been of great interest since, in contrast to time/frequency based methods, they are able to deal with both wideband and narrowband interference. These techniques are generally referred to as Space-Time Adaptive Processing (STAP) or Space-Frequency Adaptive Processing (SFAP) techniques. STAP and SFAP approaches in GNSS applications have been studied in the literature for several years [
11,
12,
13,
14,
15]. These methods combine spatial and temporal filters to suppress more radio frequency interfering signals by increasing the Degree of Freedom (DoF) of the array without physically increasing the antenna array size. The term “adaptive” means that the array follows changes in environment and constantly adapts its own pattern by means of a feedback control. The main focus here is on space-time processing and the study of adaptive methods is not considered. Nevertheless, the proposed approach can be easily extended to the adaptive cases as well.
Besides the superior advantages of space-time filtering, specific considerations should be taken into account in designing such filters in order to prevent induced biases in pseudorange measurements and achieve accurate and precise time and position solutions [
16,
17]. The output of the space-time filter is basically a direction-frequency dependent response. Even if the filter completely nullifies interfering signals, the non-linearity behavior of its frequency response may result in biased measurements, distortion or broadness of the cross correlation functions during receiver acquisition and tracking stages. This may not be tolerable especially for high precision GNSS applications. The effects of this distortion on GNSS signals were recently studied [
16,
17,
18,
19].
To reduce this distortion, one effective approach is to incorporate the satellite signal steering vector, which contains all the spatial information of the incoming signal, in the structure of the space-time filter as a constrained optimization problem [
19,
20,
21,
22,
23]. In fact, these methods are extended versions of MVDR and MPDR beamformers for space-time processing. Although employing the satellite steering vectors in the beamformer structure avoids unintentional signal attenuation, the resulting cross correlation functions after beamforming may still be distorted, which in turn produces biases on pseudorange measurements and errors in the position solutions. This is due to the fact that in these techniques there is no explicit assumption on the linearity of the STP filter response. In [
9], it is suggested that the space-time filter be designed to have a real frequency response (formed from a filter multiplied by its conjugate); however this was not analyzed and a practical realization of filter coefficients was not reported. There are other effective approaches to reduce the induced bias error; however, they do not guarantee a distortionless response for GNSS signals [
16,
18].
Although employing the satellite signal steering vector has been widely employed in the STP processing, limited papers addresses the steering vector estimation in the presence of interference. The steering vector conveys the spatial information that can be also employed for various applications such as multipath mitigation, SNR maximization and Angle of Arrival (AOA) estimation. Steering vector estimation in a jammed environment for attitude determination was studied in [
24]; in this paper it is assumed that the spatial covariance matrix is positive definite and invertible which may not be the case in all inference scenarios where the covariance matrix becomes ill-conditioned.
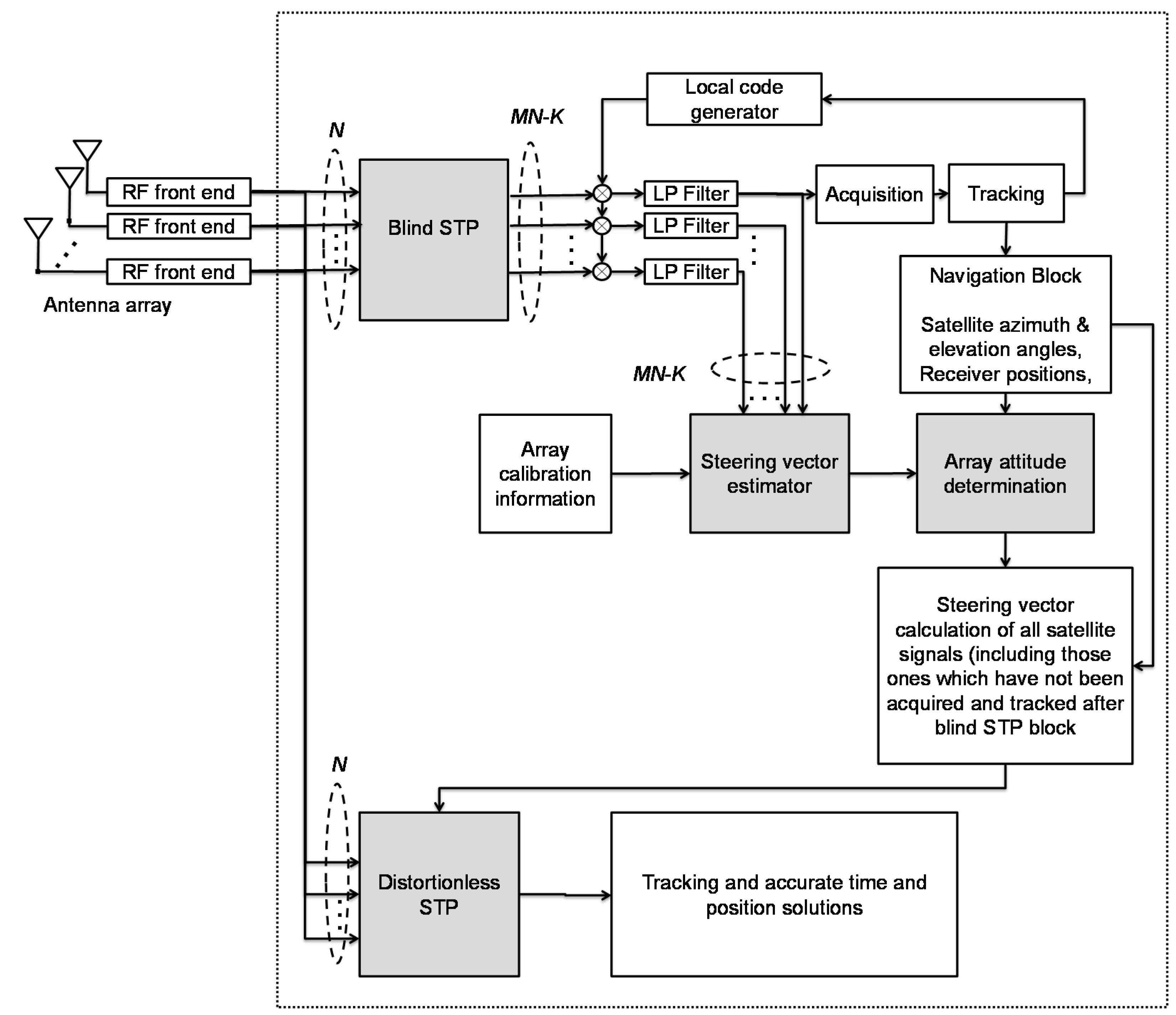
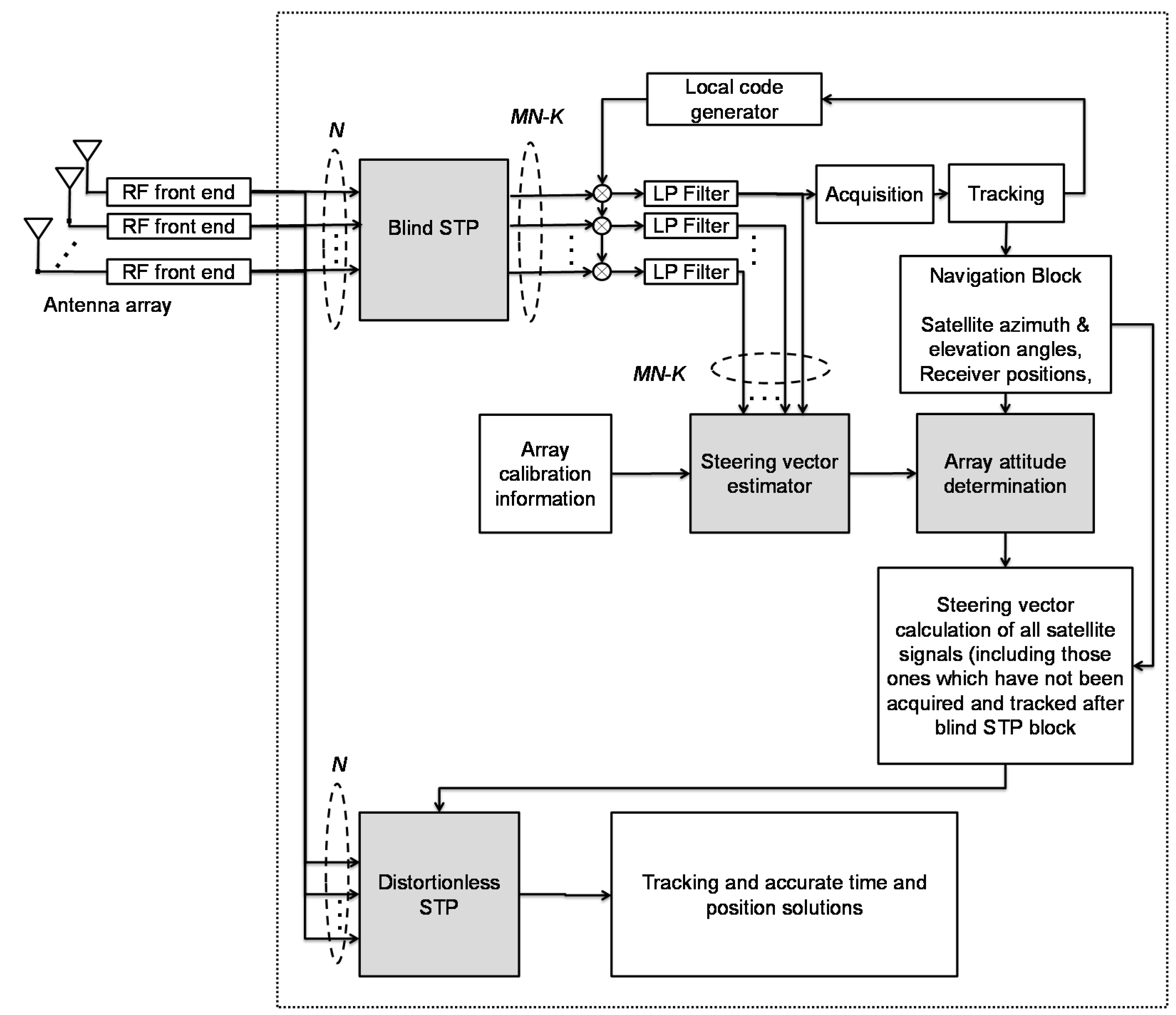
The steering vector can be obtained by either measuring phase differences of the received signals at the antenna array elements, or by calculating it from array platform attitude parameters and satellite azimuth and elevation angles. The first approach needs to acquire and track the received signals, some of which may not be available in challenging environments. The second approach can calculate the steering vector of all satellites regardless of the signal quality and availability but requires attitude parameters. Herein both methods are employed in the proposed structure of the receiver such that steering vectors, measured from the available satellite signals, are used to estimate attitude parameters and consequently the steering vector of all satellite signals without imposing any assumption on the spatial covariance matrix.
The other part of this research focuses on space-time filter design for GNSS interference mitigation. Due to the simplicity in implementation, Space-Time Processing (STP) filters in GNSS applications are mostly implemented before the despreading process (i.e., correlation and Doppler removal). However, since satellite steering vectors are not employed in the structure of the filter, some satellite signals may be attenuated or distorted, which will adversely affect the performance of the receiver. Therefore, herein a two-stage receiver structure is proposed. The first stage is implemented before the despreading process. In this stage, by estimating a projection matrix from the Singular Value Decomposition (SVD) of the pre-despreading space-time covariance matrix, the received signals are projected into the interference-free subspace. Estimating the signal steering vector from the projected subspace is an underdetermined problem and it is shown that extracting the spatial information from the projected signals may not be possible or can be partially done for some signals. In fact, some of the array DOF information is used to remove interfering signals. Therefore, in the second stage, attitude parameters are estimated considering those steering vectors that could be estimated. By using attitude parameters and satellite azimuth and elevation angles from ephemeris data, the steering vector of all satellite signals can be then accurately calculated and employed in designing a space-time filter. A novel approach for designing the space-time filter is also proposed not only to nullify the interference signals but also to increase the C/N0 and to avoid biases and distortions on cross correlation functions.
In order to verify the effectiveness of the proposed method for steering vector estimation in the presence of interference and assess its performance, a set of real GPS L1 signals was collected and simulated interfering signals were added to the digitized samples in software. A tactical-grade IMU was used as reference to evaluate the accuracy of satellite steering vectors and heading estimates. Moreover, to evaluate the performance of the proposed space-time filter, it was compared to the well-known space-only MPDR and space-time MPDR beamformer methods.
2. Signal Model
Without loss of generality and for the sake of simplicity, only one GNSS signal is considered in the formulations below. Complex baseband representation of the received signal vector at an arbitrary
N-element array configuration for the satellite signal and
K interference signals can be written as:
where
B is a matrix whose columns indicate interfering signal steering vectors and
η is a complex additive white Gaussian noise vector.
s represents the GNSS signal waveform and
v is a vector specifying
K interfering signal waveforms. In Equation (1),
a is an
N × 1 vector representing the steering vector (or array manifold vector) of the satellite signal defined as:
in which λ is the wavelength of the signal and
zn,
n = 1, 2, …,
N is a 3 × 1 unit vector pointing to the
nth antenna element and
d is a 3 × 1 unit vector pointing to the satellite direction in the body frame coordinate system and
T stands for the transpose operation.
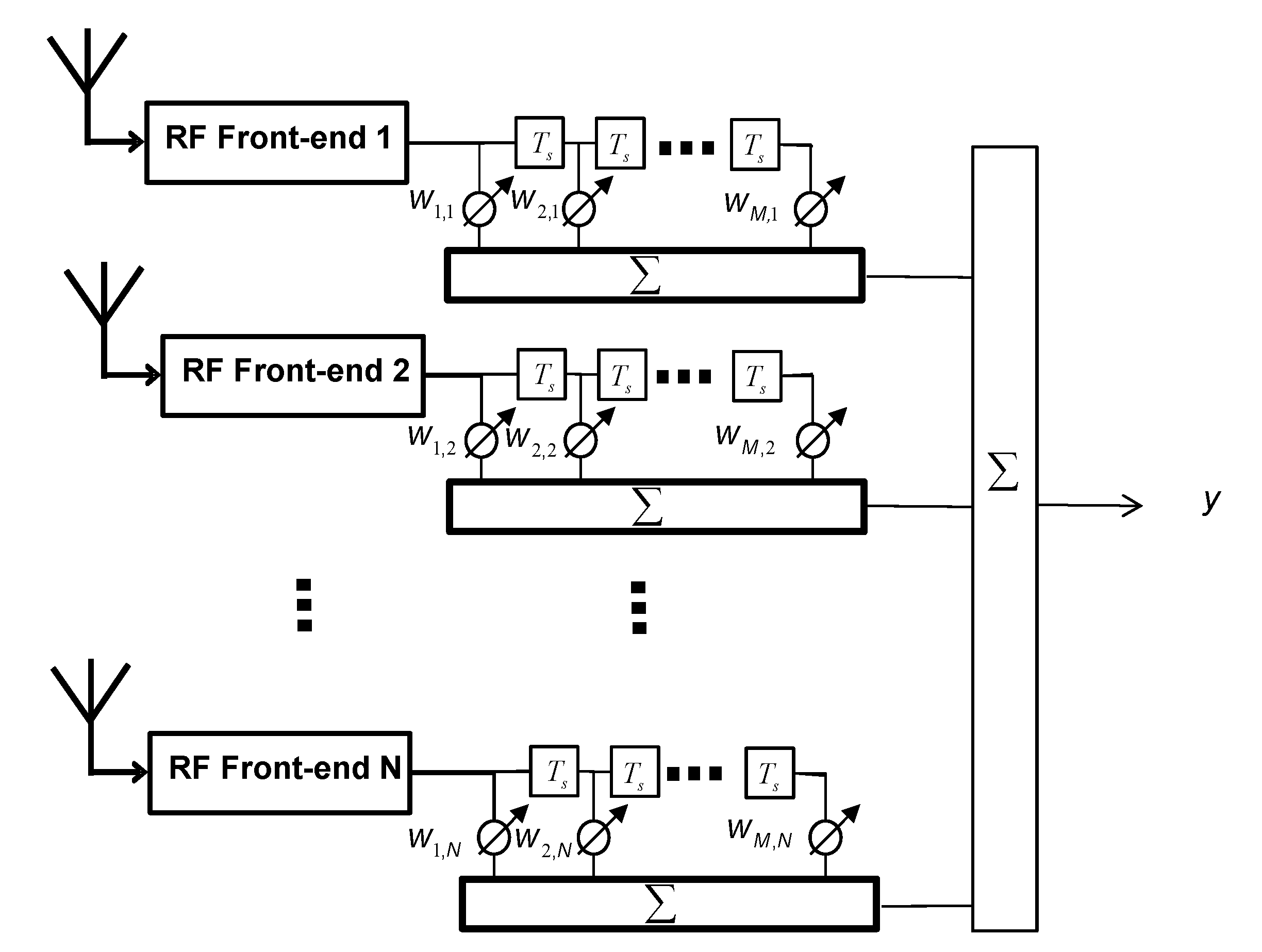
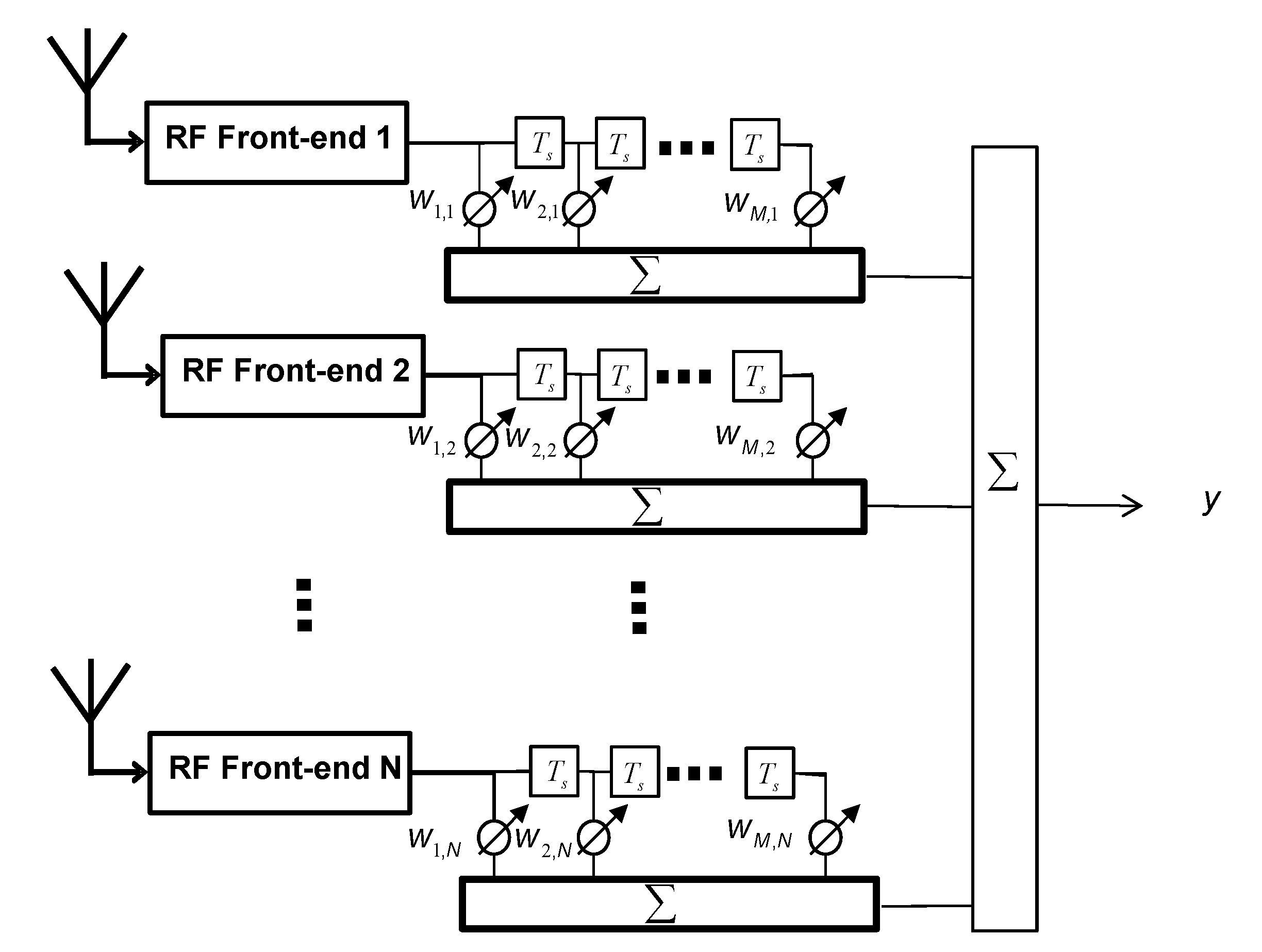
Figure 1 shows that the standard implementation of the STP filter in which each antenna is followed by a temporal filter or a Tapped Delay Line (TDL) with the typical delay time of a sampling duration denoted by
Ts.
Figure 1.
Generic structure of a space-time filter.
Figure 1.
Generic structure of a space-time filter.
An antenna array with
N elements and TDLs with
M − 1 taps leaves
MN unknown filter coefficients which should be determined. For each time snapshot,
MN received samples form a
MN × 1 vector can be written as:
in which
rm,n is the
mth delayed sample at the
nth antenna element. Filter coefficients corresponding to these samples are defined as:
Hence, the space-time filter output is obtained as:
in which
H denotes the conjugate transpose. In order to suppress high power interference, power of the filter output should be minimized as:
where
E{} represents the statistical expectation and
is the spatial-temporal covariance or correlation matrix defined as:
In the following section, a projection matrix into the interference-free subspace is calculated based on this correlation matrix in order to mitigate interference.
4. Experimental Results
Due to frequency regulations, outdoor radio frequency (RF) power transmission in the GNSS frequency bands is prohibited. Therefore, special considerations have to be taken into account while testing the performance of anti-interference techniques. Some previous work has suggested combining interference signals to GNSS signals through wires. However, for an array antenna, this type of test requires many combiners, cables and connectors and moreover control on the angle of arrival of GNSS and interferer signals would be difficult. Herein for testing and evaluating the performance of the proposed method, interference has been generated in software and added to the digitized GNSS samples.
Figure 3.
Data collection scenario and setup.
Figure 3.
Data collection scenario and setup.
The test set up and trajectory are shown in
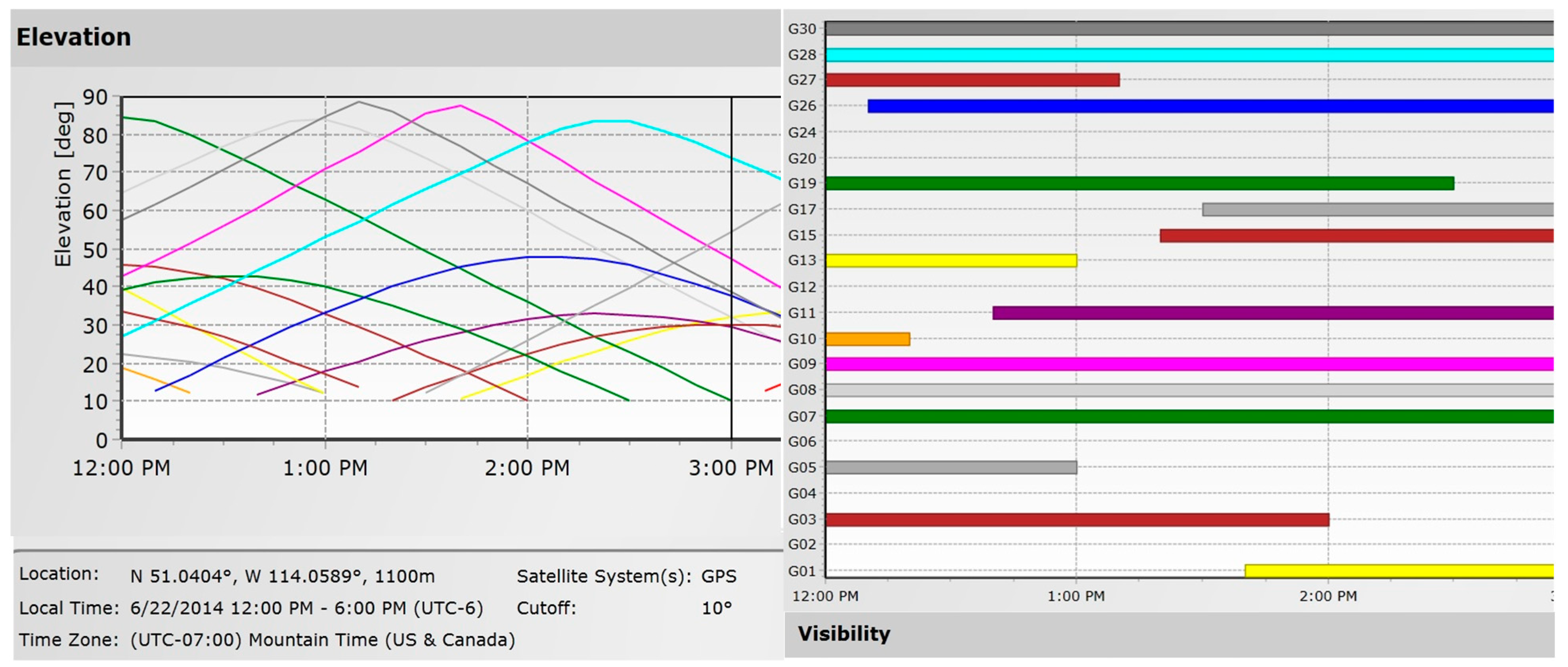
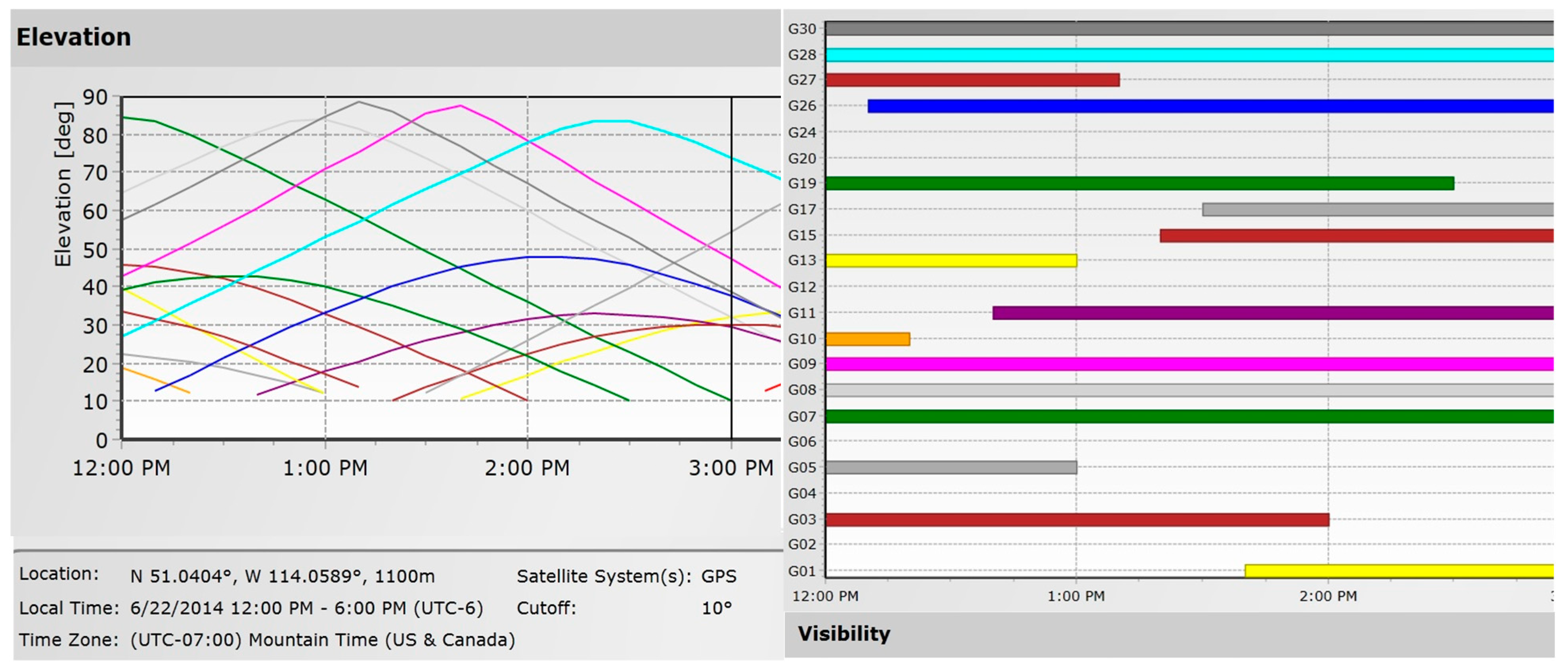
Figure 3; GPS L1 C/A signals were collected using an array of six antennas. The data collection was performed with an open view of satellites. A circular trajectory was driven for the calibration process to cover all azimuth angles. In order to cover a wide range of elevation angles, the circular trajectory was repeated several times over a two-hour interval. The data collection interval was long enough to allow satellites to move significantly in the sky to cover most elevation angles. Satellite visibility and elevation during the data collection are shown in
Figure 4. Satellite Pseudo Random Noise (PRN) codes, elevation and azimuth angles used for the proposed space-time interference mitigation method are also shown in
Table 1. The antenna array was mounted on the top of a vehicle and the six antenna elements were connected to a phase coherent six-channel Fraunhofer/TeleOrbit RF front-end. The received signals were then sampled, down converted and stored for post processing. Moreover, a NovAtel SPAN
TM LCI system, which includes a NovAtel SPAN
® enabled GNSS/INS receiver (SPAN SE) and a tactical grade IMU LCI was used as a reference to provide reference heading values and positions for comparison purpose. IMU measurements were sent to the receiver where a coupled GNSS/INS position, velocity and attitude solution was generated. Raw GPS data was also collected under Line of Sight (LOS) conditions using another receiver as a base station to provide differential positioning. The data collected by SPAN and the base station file were then fed to the NovAtel Inertial Explorer
® post-processing software to produce accurate reference orientation angles (the estimated standard deviations for position in each direction are below 5 cm and the estimated standard deviations for attitude parameters are below 0.1°).
The precise antenna array calibration method proposed in [
25] was employed to calibrate the antenna array. In this method, a two-stage optimization for precise calibration is used in the form of two EVD problems. In the first stage, constant uncertainties are estimated whereas in the second stage the dependency of each antenna element gain and phase patterns to the received signal AOA is considered for refined calibration. An open source MATLAB-based single antenna software receiver [
28] was modified as a multi-antenna receiver where the acquisition, tracking and position solution parts of the original software were modified. The interference mitigation units were added to the receiver and the structure of the receiver was changed from a “single-antenna tracking” to a “multi-antenna multi-delay tracking” receiver employing both spatial and temporal processing.
Table 1.
PRNs used during test and corresponding azimuth and elevation angles and C/N0 after each interference mitigation stage.
Table 1.
PRNs used during test and corresponding azimuth and elevation angles and C/N0 after each interference mitigation stage.
| PRN | Azimuth (degrees) | Elevation (degrees) | C/N0 Blind STP (dB-Hz) | C/N0 Distortionless STP (dB-Hz) |
|---|
| 1 | 342 | 19 | 39.1 | 44.1 |
| 3 | 45 | 6 | 37.7 | 46.4 |
| 7 | 321 | 31 | 42.6 | 44.7 |
| 8 | 328 | 55 | 50.5 | 49.1 |
| 9 | 308 | 72 | 54.1 | 54.6 |
| 11 | 4 | 32 | 35.1 | 43.5 |
| 15 | 139 | 25 | 45.7 | 44.5 |
| 17 | 256 | 30 | 37.8 | 49.9 |
| 19 | 46 | 18 | 41.1 | 49.8 |
| 26 | 179 | 48 | __ | 50.2 |
| 28 | 159 | 81 | 39.0 | 50.4 |
| 30 | 319 | 62 | 53.6 | 52.3 |
In the first test, one CW signal as an interference signal at GPS L1 centre frequency is added to the received signals. The elevation and azimuth of the interference signal are 7.5° and 120° and the interference-to-noise density ratio (I/N
0) is 90 dB-Hz. The number of the TDL taps is 4.
Figure 5 shows the array gain pattern after applying the blind projection matrix. As shown, a deep null is placed in the direction of the interference; however, since the steering vectors of the satellite signals have not been employed in the space-time filter structure, some of the desired signals are also unintentionally attenuated or even nulled out.
Figure 5.
Normalized antenna array gain pattern at the interference frequency.
Figure 5.
Normalized antenna array gain pattern at the interference frequency.
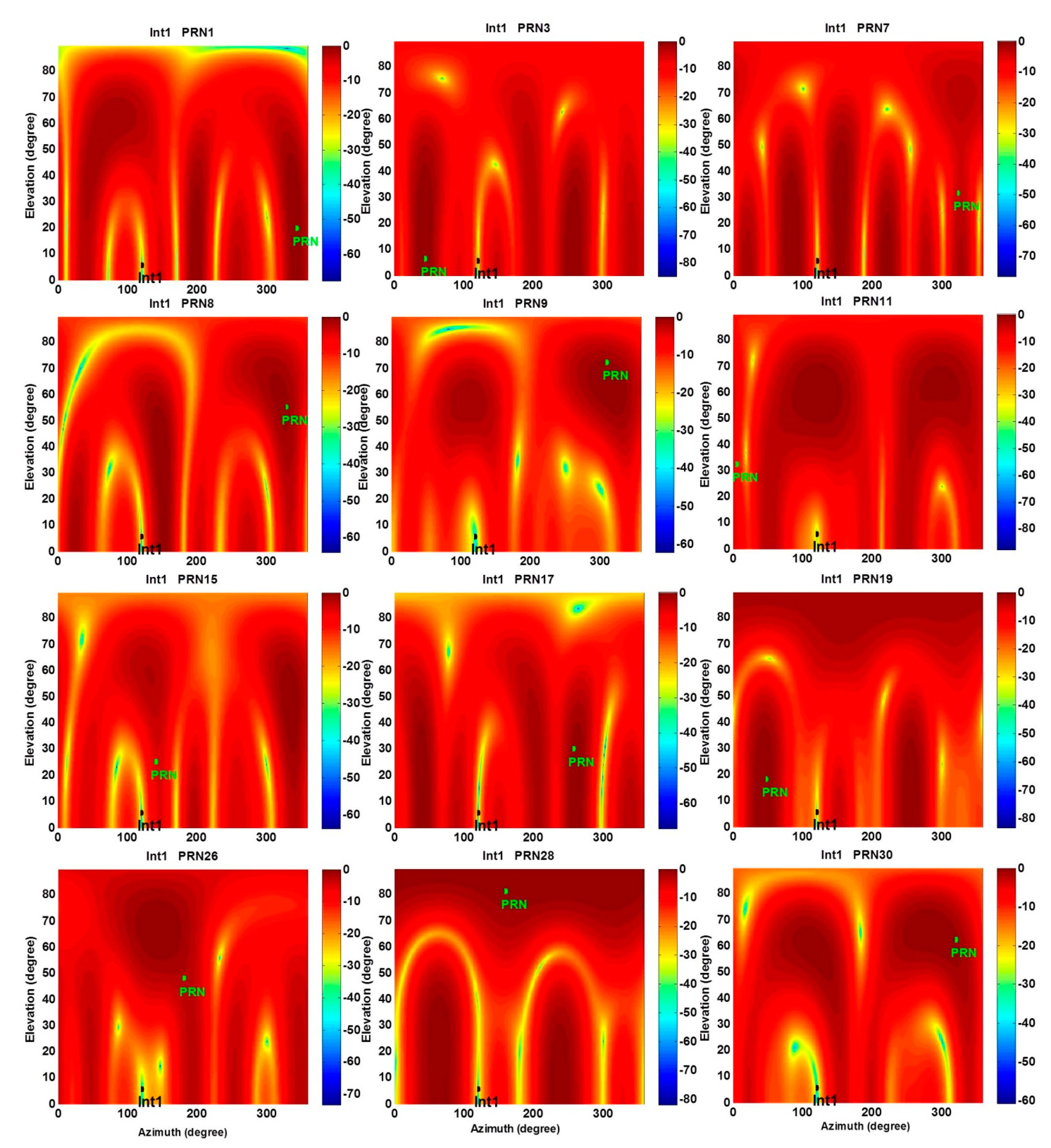
In the second stage of the proposed receiver and after employing the steering vectors, the STP filter coefficients can be determined to not only nullify the interference but also steer the main lobe of the array gain pattern into the direction of the desired signal as shown in
Figure 6. Considering Equation (9), for a space-time filtering, the gain pattern (in dB) is calculated as
where
is a response of the filter to the impinging signal with the steering vector
and frequency
f. In fact, this gain pattern determines the space-time filter gain at a specific frequency, azimuth and elevation angles.
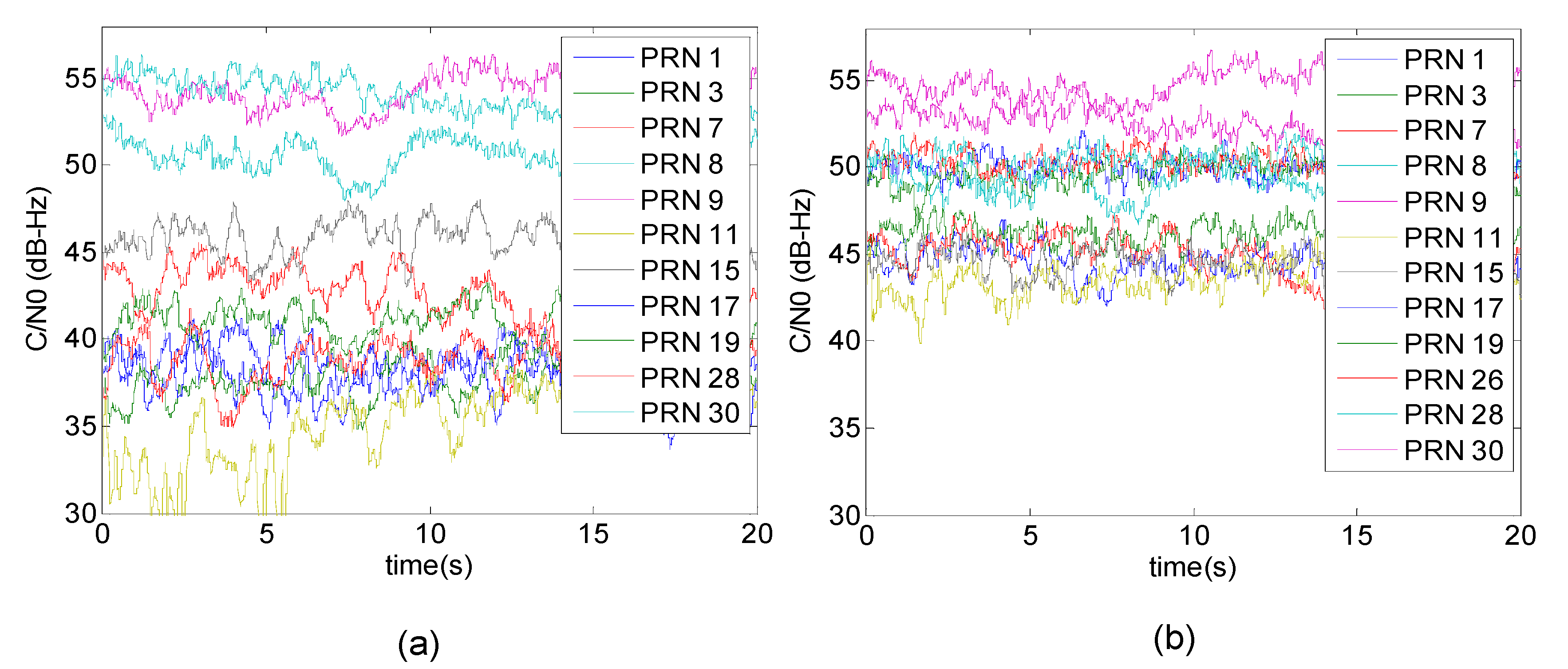
In order to obtain an actual sense of the improvement achieved,
Figure 7 compares C/N
0 values between blind and distortionless STP filtering for the same 20 s of received satellite signals. Average C/N
0 values are also shown in
Table 1. Since PRN 8, 9 30 are located close to the main lobe of the gain pattern in the blind filter, after applying the distortionless filter, their C/N
0 values are slightly decreased or not considerably changed. This is due to the fact that the DoF is halved to maintain linearity of the phase response for the distortionless filter. However, the average C/N
0 of all PRNs is increased approximately by 5 dB-Hz (up to 12 dB-Hz for PRNs 28 and 17). In addition, PRN 26 was significantly attenuated and denied after blind filtering but it could be acquired and tracked by employing the distortionless STP filtering.
Figure 6.
Normalized antenna array gain patterns at the interference frequency for the proposed distortionless STP filtering.
Figure 6.
Normalized antenna array gain patterns at the interference frequency for the proposed distortionless STP filtering.
Figure 7.
(a) Measured C/N0 after employing the blind STP filtering (b) and after employing the proposed distortionless STP filtering.
Figure 7.
(a) Measured C/N0 after employing the blind STP filtering (b) and after employing the proposed distortionless STP filtering.
The performance of the attitude determination block is now reported. Recall that the SPAN LCI system was used as a reference to provide external and independent heading and attitude parameters. Assuming a horizontal motion and considering Equations (38) and (39), the heading angle can be estimated using the following simplified relation:
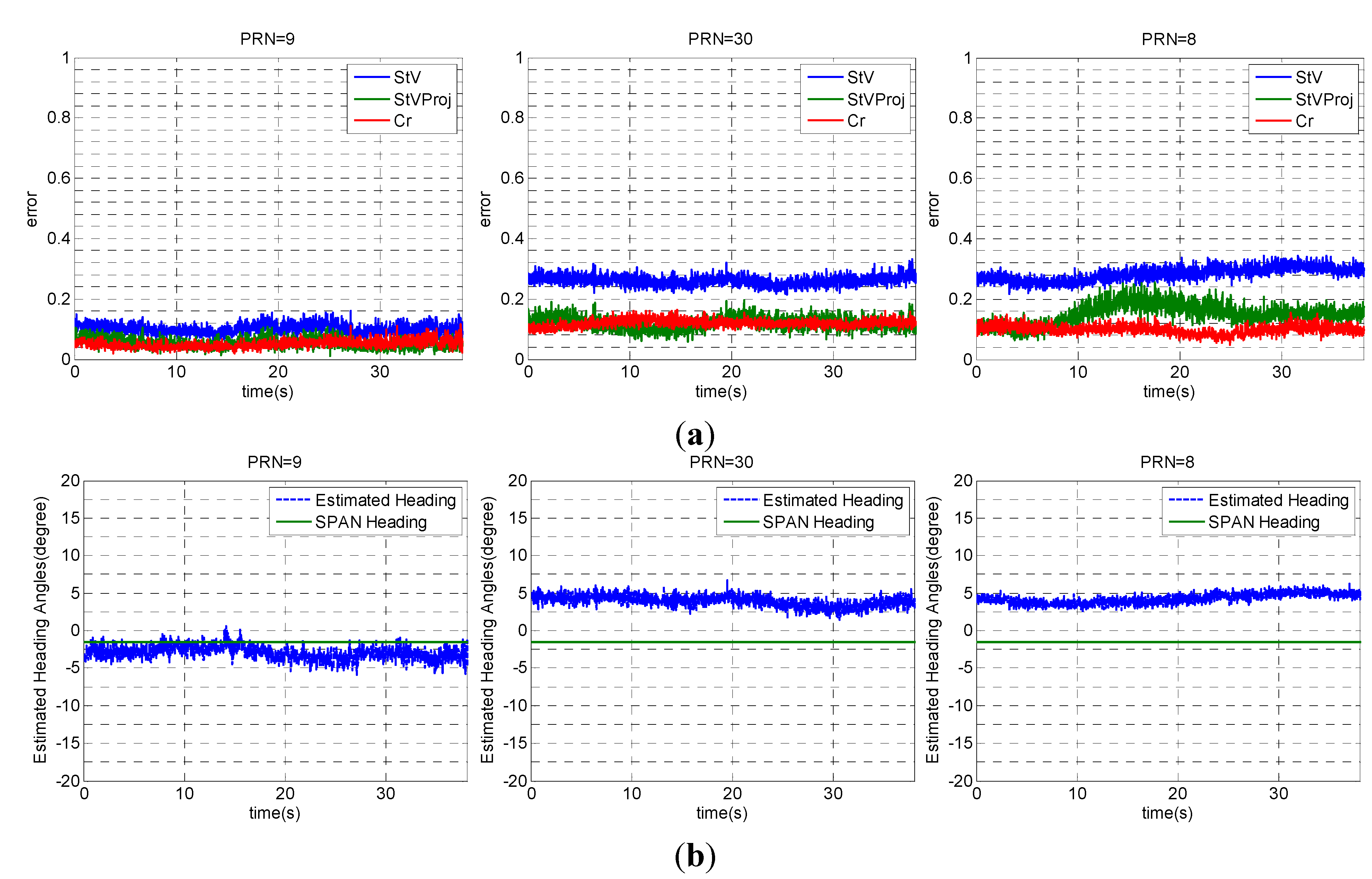
Based on the criterion in Equation (35), PRNs 30, 9 and 8 are chosen for heading determination. In fact, as shown in
Figure 5, these PRNs are located close to the main lobe of the array gain pattern. Therefore, employing these signals leads to more accurate estimates of steering vectors and consequently heading angles. In this test, heading angles were calculated within a 40 s interval in static mode.
Figure 8a displays two error types. The first error (StV) compares the estimated steering vector from the proposed receiver
with that measured from the SPAN system
and the second error (StVProj) compares
with the parallel projected component of the measured steering vector by the SPAN system (
). These errors are calculated as:
Results show that the StVProj errors are less than the StV errors, which verifies the fact that
is an estimate of the parallel component
, and the orthogonal component
cannot be estimated (see Equations (33) and (34)).
Figure 8a also shows the value of
Cr calculated in Equation (35), which reveals that the structure of estimated steering vectors is close to that of a true steering vector as defined in Equation (2).
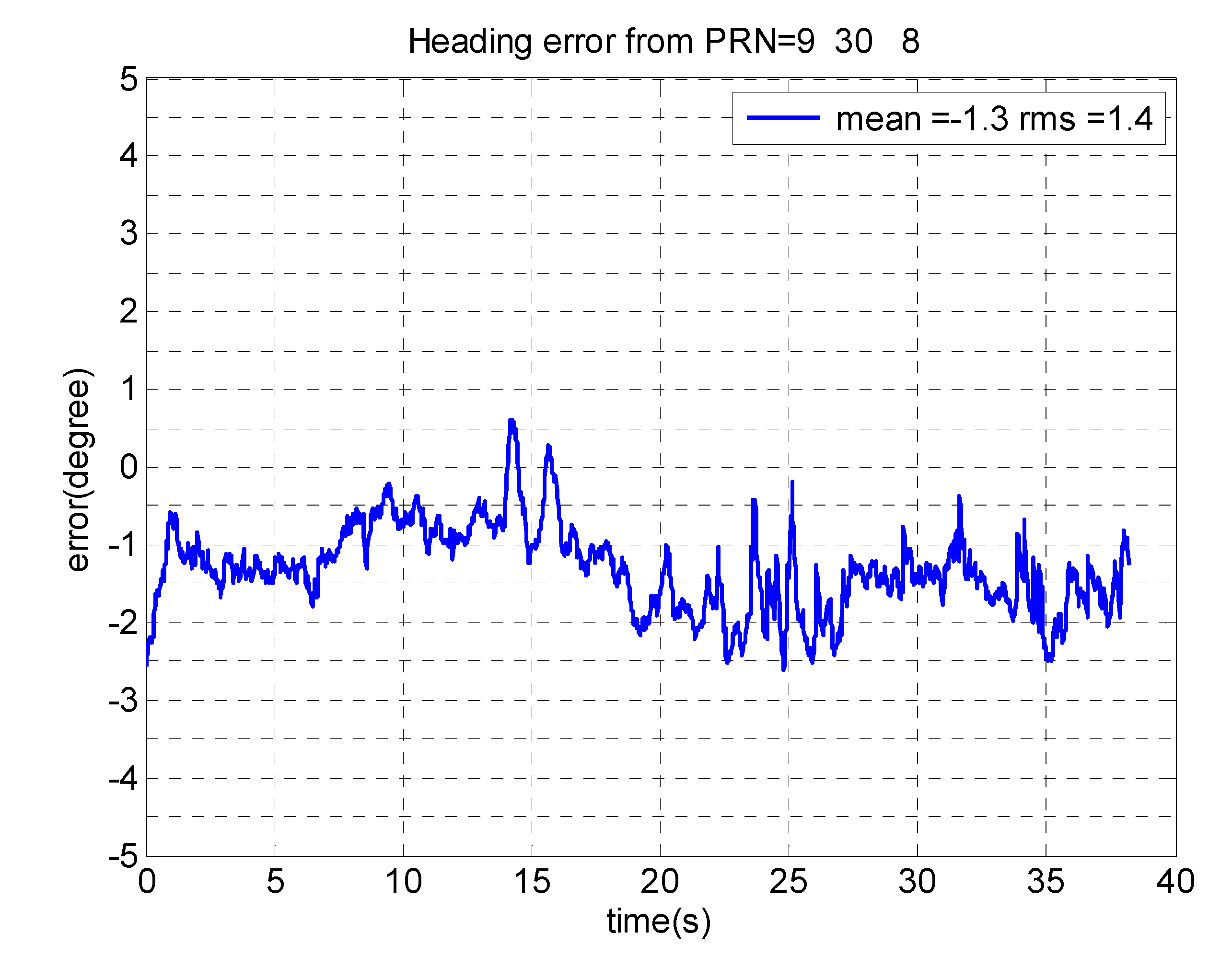
Figure 8b compares the estimated heading angles for each of these three PRNs with those obtained with the SPAN system.
Figure 9 shows the errors of the estimated heading angles considering all these PRNs, showing an approximate agreement of 1.5° for heading estimates. In practice and in a dynamic operation environment, a receiver should constantly select among satellite signals with lower
Cr values for estimating attitude parameters. Selecting proper satellite signals also depends on their elevation angles. In fact, satellites with higher elevation angles show poorer accuracy for heading estimation such that the satellite located at the receiver’s zenith cannot be used to sense the horizontal motion. However, the errors due to multipath and noise are higher for satellites with low elevation angles. Therefore, mid elevation satellites could be a good option for extracting attitude parameters.
Figure 8.
(a) Comparison of estimated steering vectors (b) and estimated heading angles for PRN 9, 30 and 8.
Figure 8.
(a) Comparison of estimated steering vectors (b) and estimated heading angles for PRN 9, 30 and 8.
Figure 9.
Error in heading angles obtained from PRNs 9, 30 and 8.
Figure 9.
Error in heading angles obtained from PRNs 9, 30 and 8.
As mentioned before, the blind STP may distort the correlation functions and produce biases in the pseudorange measurements. Moreover, some satellites may be unintentionally nullified, which in turn reduces the Dilution of Precision (DOP). These biases and resulting attenuations degrade the position solution accuracy.
Table 2 lists errors in the ENU coordinate system for three interference scenarios for distortionless and blind filters.
Table 2.
Results for different interference scenarios.
Table 2.
Results for different interference scenarios.
| 20 s of data in the static mode | Scenario 1 One CW Interfernce | Scenario 2 One CW & One Wideband Interfernce | Scenario 3 Six CW Interfernce |
|---|
| I/N0 = 90 dB-Hz TDL = 4 | I/N0 = 90 dB-Hz TDL = 4 | I/N0 = 90 dB-Hz TDL = 6 |
|---|
| Blind STP ENU error (m) | E (mean,rms) | (−0.8,0.9) | (−4.0,4.8) | ~(500,500) |
| N (mean,rms) | (−0.7,1.3) | (−8.1,9.6) | ~(1000,1000) |
| U (mean,rms) | (−3.9,4.1) | (−8.0,8.2) | ~(1000,1000) |
| MPDR ENU error (m) | E (mean,rms) | (−0.6,0.6) | (−0.8,1.0) | - |
| N (mean,rms) | (−0.9,1.0) | (−1.2,1.3) | - |
| U (mean,rms) | (−1.9,2.0) | (−2.5,2.7) | - |
| STP MPDR ENU error (m) | E (mean,rms) | (−0.8,0.9) | (−3.5,3.6) | (−70.2,75.0) |
| N (mean,rms) | (−1.7,1.8) | (−4.0,4.1) | (116.9,126.5) |
| U (mean,rms) | (−8.4,8.4) | (−13.5,13.6) | (−148.8,149.2) |
| Proposed Distortionless STP ENU error (m) | E (mean,rms) | (−0.4,0.6) | (−1.2,1.5) | (−0.1,0.3) |
| N (mean,rms) | (−0.4,0.5) | (−0.6,0.7) | (−0.5,0.6) |
| U (mean,rms) | (−0.2,1.0) | (−0.5,0.7) | (2.7,2.7) |
| Blind STP Average C/N0 (dB-Hz) | 43.3 | 44 | 41.9 |
| MPDR Average C/N0 (dB-Hz) | 51.4 | 49.6 | - |
| STP MPDR Average C/N0 (dB-Hz) | 51.4 | 50.0 | 46.2 |
| Proposed Distortionless STP Average C/N0 (dB-Hz) | 48.3 | 44.2 | 45.7 |
| Blind STP Number of PRNs acquired & tracked | 11 | 8 | 5 |
| MPDR Number of PRNs acquired& tracked | 12 | 12 | - |
| Proposed Distortionless STP & STP MPDR Number of PRNs acquired& tracked | 12 | 12 | 12 |
The I/N0 for each wideband or narrowband signal is 90 dB-Hz. The interference signals are spread over the GPS L1 frequency band and have incident elevation angles in the range of 2° to 10°. In this table, the number of acquired and tracked satellites after employing the proposed blind and distortionless STP filters and the resulting average C/N0 are also shown. In the simple interference scenario (Scenario 1), the number of acquired satellite signals is slightly different between blind and distortionless STPs and the resulting improvement in position solution is due to decreasing the distortion and bias on correlation functions; in the harsh interference scenario (Scenario 3), improvement occurs also because of increasing the number of acquired satellites and DOP improvement. In general the improvement obtained with the proposed methods depends on the interference scenario, antenna array configuration, number of taps in TDLs, calibration accuracy, power and direction of GNSS and interference signals, DOP and other factors which have not been analyzed in this paper.
In order to highlight the advantages of the purposed distortionless STP filter, its performance is compared to the conventional MPDR (space only processing) and modified STP MPDR beamformers briefly introduced as follows:
MPDR Beamformer: this beamformer has been widely employed in array based applications. In GNSS applications, as long as the array is calibrated and its orientation is determined, MPDR is one of the powerful approaches available to suppress interfering signals while maintaining desired signals. The optimization problem for the MPDR beamformer can be expressed as:
where
is the spatial correlation matrix,
is the steering vector defined in Equation (2) and
is the array weighting vector. The goal is to minimize the power subject to the constraint. This minimization problem can be solved by using a Lagrange multiplier approach. The optimal gain vector is obtained as [
5]
STP MPDR Beamformer
: this beamformer is the extended version of the MPDR beamformer for space–time processing and also employed in several papers (e.g., [
18,
19,
20]). The degree of freedom of the array compared to MPDR beamformer is increased. The optimization problem for the MPDR beamformer can be expressed as:
where
and
are defined in Equations (4) and (6) and the vector
is defined as:
In this filter, in order to force the beamformer to have a fixed group delay, only one group of tap gains with a certain delay (without loss of generality here the first group is chosen) is required to pass the satellite signal undistorted. However, the filter response is not necessarily linear in phase and cross correlation functions may be asymmetrical and distorted. This minimization problem can be solved using a Lagrange multiplier approach.
For the MPDR beamformer, the array DoF, indicating the number of unwanted signals that can be nullified, is equal to the number of antenna elements minus one. Since this beamformer is only based on spatial processing, cross correlation functions and position solutions do not experience any distortion due to time filtering. ENU error results for this beamformer, reported in
Table 2, verify the fact that the MPDR beamformer can suppress the first two scenarios without generating significant ENU errors but is not able to mitigate six uncorrelated narrowband interference signals. However, the proposed distortionless STP filter not only provides extra DoF for narrowband interference mitigation but also keeps the cross correlation functions undistorted. The results also show that the proposed STP filter outperforms the STP MPDR beamformer in terms of distortions and ENU errors. Contrary to the STP MPDR beamformer, the proposed STP filter is designed not only to maximize the SNR but also to be linear in phase. In other words, the proposed STP filter is spatially and temporally distortionless. It should be noted that for the proposed STP filter the resulting average C/N
0 values are slightly lower than those of the space-only and STP MPDR beamformers because of applying a restriction on the structure of the filter. However, as shown in
Table 2, the positioning performance of the proposed approach considerably outperforms that of the STP MPDR method.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




