3.1. A Dynamical IMU Data Denoising Technology Based on Kalman Filter
The Kalman filter which is used to estimate the states errors by the structure of the state space and
a priori information of the process noise and the measurement noise is widely used in modern navigation systems. It can be used to effectively deal with the signals which are only disturbed by random noise or the disturbance can be treated as an independent variable of the system state variables [
29]. The equivalent discrete system is as follows:
where,
denotes the state vector at the time
k;
denotes the system output (measured signal) at time
k;
denotes the process noise at the time
k;
denotes the measurement noise at the time
k.
is the one step state transformation matrix;
is the input matrix
.
is the measurement matrix
.
and
are the white noises with the expected value equal to zero.
where,
is the covariance matrix of the process noise
,
is the covariance matrix of the measurement noise
.
In the Kalman filter, we ignore the control signal and consider the uncertainty part as the process noise and the measurement noise, then, the recursive equations of the Kalman filter are as follows:
where
is the state estimate at time
k,
is the one step predicted state,
is the error covariance matrix at time
k;
is the predicted error covariance matrix;
is the gain vector at time
k + 1.
The first step in the design of the Kalman filter for this application is to build the state space models of the gyros and the accelerometers which can describe the different system behaviors in the real environment. Then, the measurements of the gyros and the accelerometers reflect the motion of the carriers, the detailed information of the disturbance and the control signal are difficult to determine, so the control signal is ignored and the disturbance is considered as the process noise and the measurement noise. In a low dynamic environment, little acceleration change is observed and it can be considered as a constant value within one sampling period. Then the state space model and the measurement model of the acceleration are [
29]:
where,
denotes the linear velocity of the carrier,
is the acceleration,
denotes the measurement of the acceleration at time
t.
denotes the measurement noise of the acceleration which is considered as white noise.
Similarly, it is assumed that the angular rate changes insignificantly and it could be regarded as a constant value within one sampling period as well. Then the state space model and the measurement model of the gyros are [
29]:
where,
denotes the angular rate of the carrier,
is the angular acceleration,
denotes the measurement of the gyros at time
t.
denotes the measurement noise of the gyros which is considered as white noise.
Equations (18) and (19) are the continuous system equations. Discretization processing is needed before the filtering iterative calculation according to the equations from Equations (13)–(17). The detailed approximate discretization steps are as follows:
where
T denotes the filter update cycle.
Although the state space model and measurement equation of the Kalman filter for one single input and one single output system is successfully built by Equations (18) and (19), whether the filter can work normally greatly depends on the initial parameters of the Kalman filter such as the variance matrix of the measurement noise
, the variance matrix of the process noise
and the one step prediction variance matrix
. In [
29] the author has analyzed the influence of different
Qk,
,
on the Kalman filter in detail and an optimization approach for selecting the parameters of Kalman filter has been proposed, but these selected parameters do not work in a dynamic environment. In [
30,
31] the authors have proposed the adaptive moving average dual mode Kalman filter, which can adjust the filtering gain matrix
K online.
According to the above analysis, the residual detection method is introduced in this paper to monitor the motion state of the carrier. When the value of the detection function is larger than the threshold , it can be concluded that the carrier is in a rapidly changing state of motion. Then we should decrease the value of the matrix and increase the value of the matrix K to maintain the performance of the fast tracking to the carrier motion of the filter. When the value of the detection function is smaller than the threshold , it can be concluded that the motion changes slowly or the carrier is in static conditions or in uniform motion in a straight line. At this time, we should enhance the denoising performance of the system by increasing the value of and reducing the value of K. The detail instructions are described below:
The residual of the Kalman filter can be obtained from Equation (21):
Then, the variance matrix of the residual is:
After that, the detection function is:
In order to test the online parameters-adjusted Kalman filter, one set of accelerometer data and gyro data are used and the filtering results of the online parameters-adjusted Kalman filter, finite impulse response filter (FIR) and wavelet filter are compared. Because the wavelet denoising technique is out of time-delay, here, the results of the wavelet filter just works as a reference point.
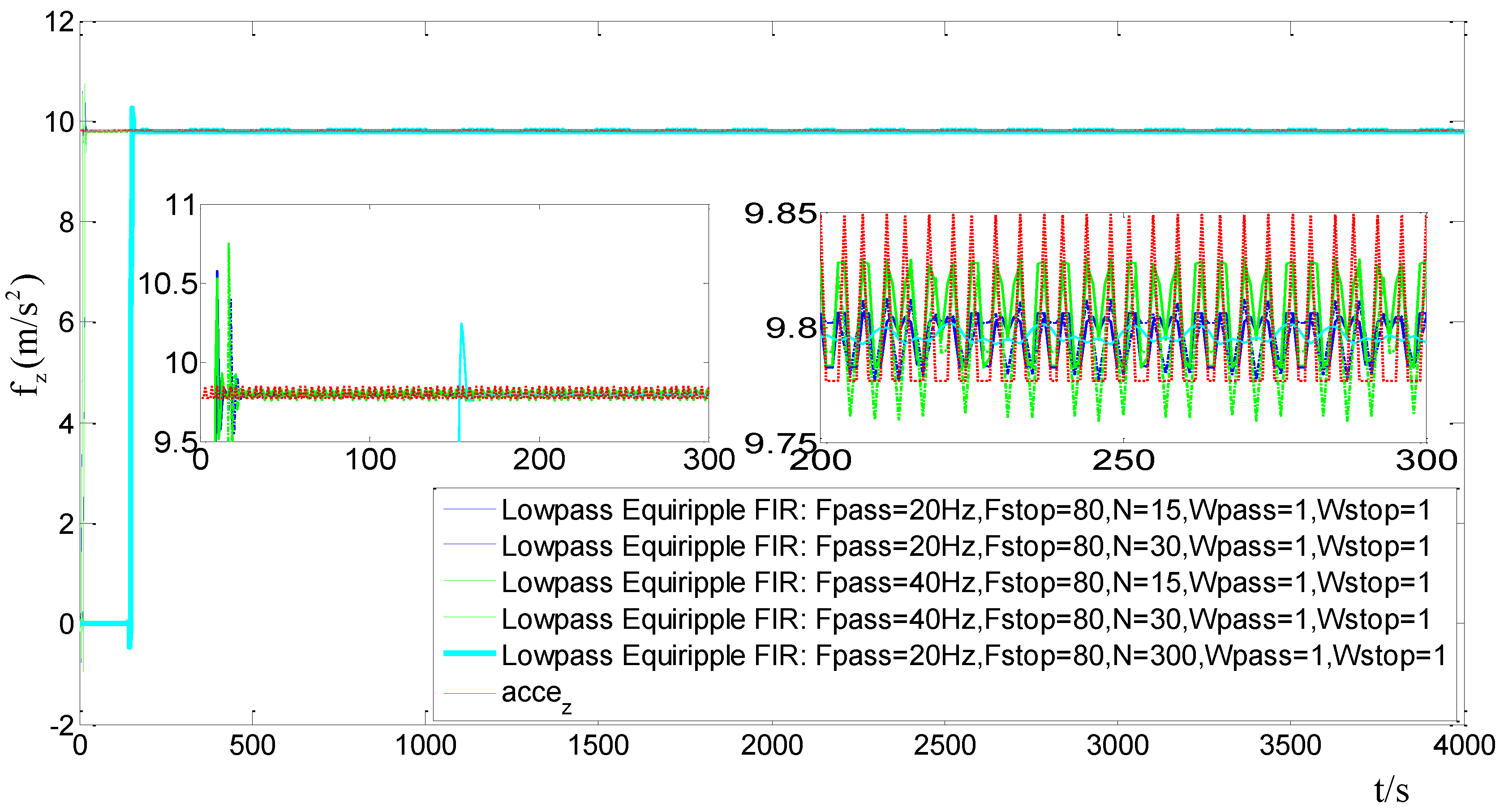
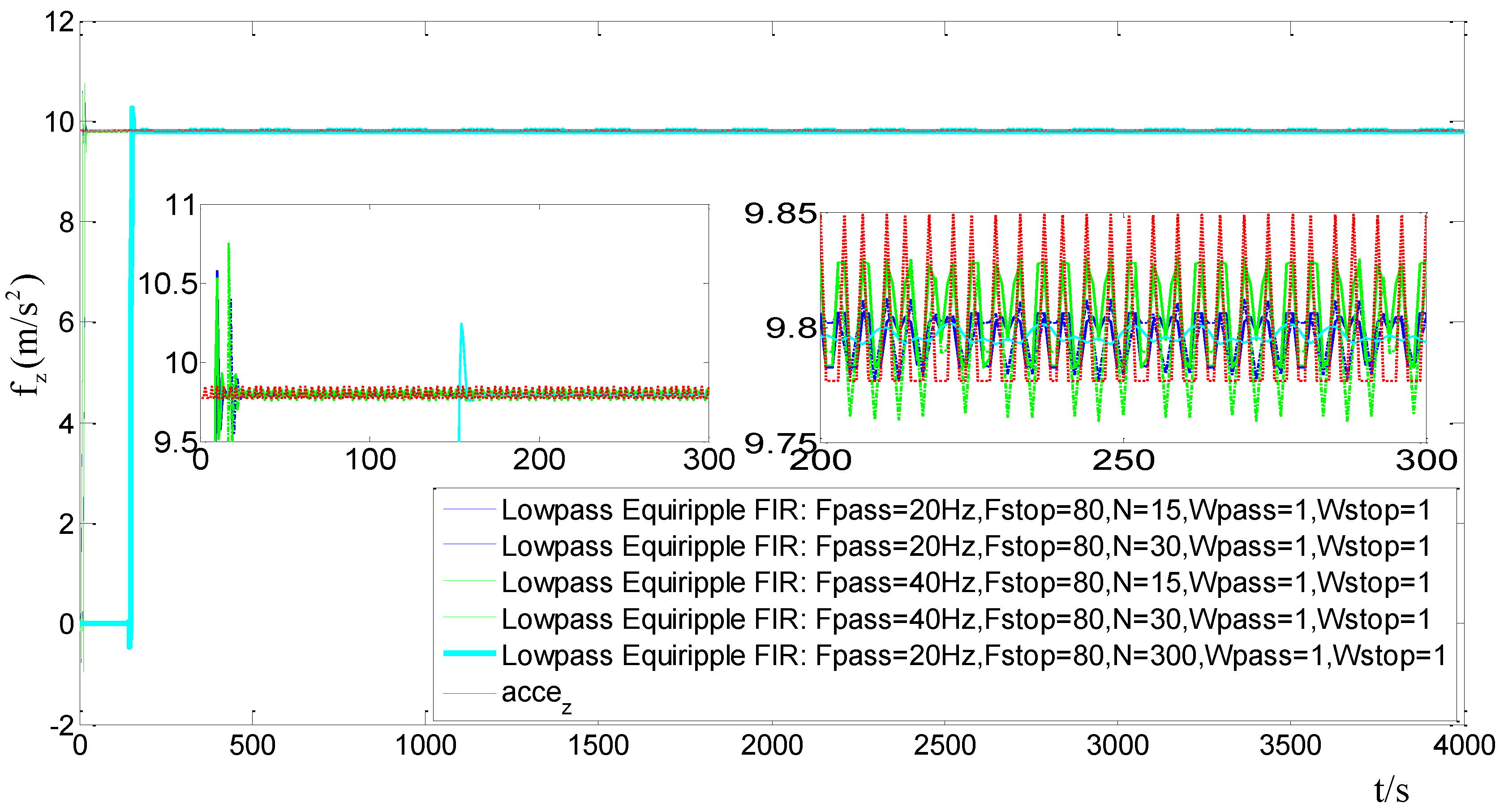
First, we should choose an optimal set of parameters for the FIR filter. In this paper, the MATLAB/Filter Design & Analysis Tool is used to design the FIR filter. The sampling frequency (Fs) equals 200 Hz.
Figure 7 shows the results of FIR filters with different parameters when an accelerometer is in static. For the FIR filters, the transition-band cut-off frequency (Fpass) are set as 20 Hz and 40 Hz, respectively. The stop-band cut-off frequency (Fstop) is set to 80Hz, the filter order (N) are set to 15, 30 and 300, respectively. Both the transition-band weight value (Wpass) and the stop-band weight value (Wstop) are set to 1.
Figure 7.
Filtering results with different filter parameters.
Figure 7.
Filtering results with different filter parameters.
From
Figure 7, it can be concluded that: (1) by maintaining the Fpass and Fstop constant, the high order of the filter results in a bigger time delay, but the filter results become better; (2) a low Fpass will result in better filtering results. Considering the time delay and the filter results, we choose an equiripple lowpass FIR filter whose Fpass equals 20 Hz, Fstop equals 80 Hz, and N equals 30.
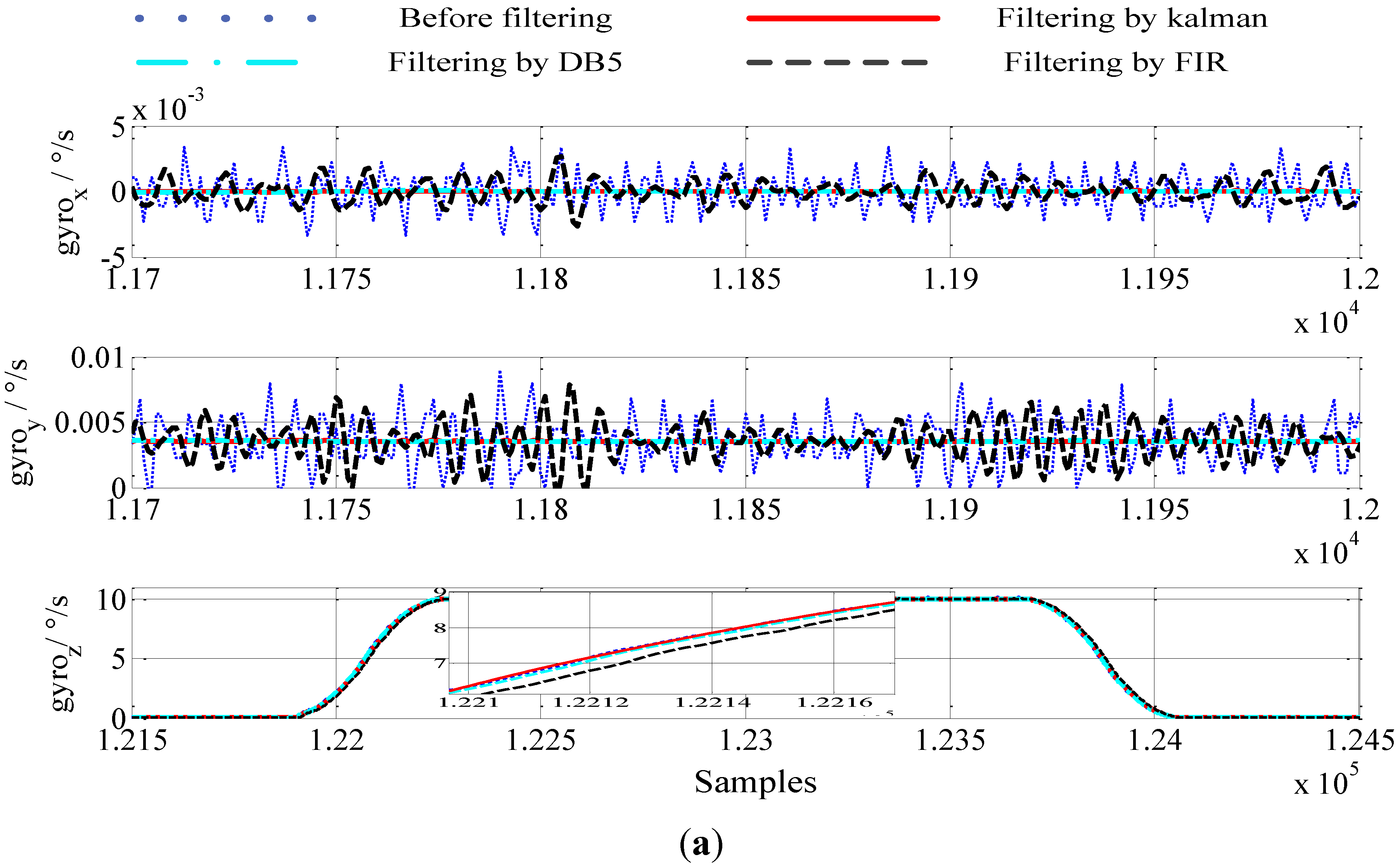
Figure 8 and
Figure 9 are the results of the outputs of the gyros and accelerations before and after filtering. The abscissas of the figures denote the sampling point sequence.
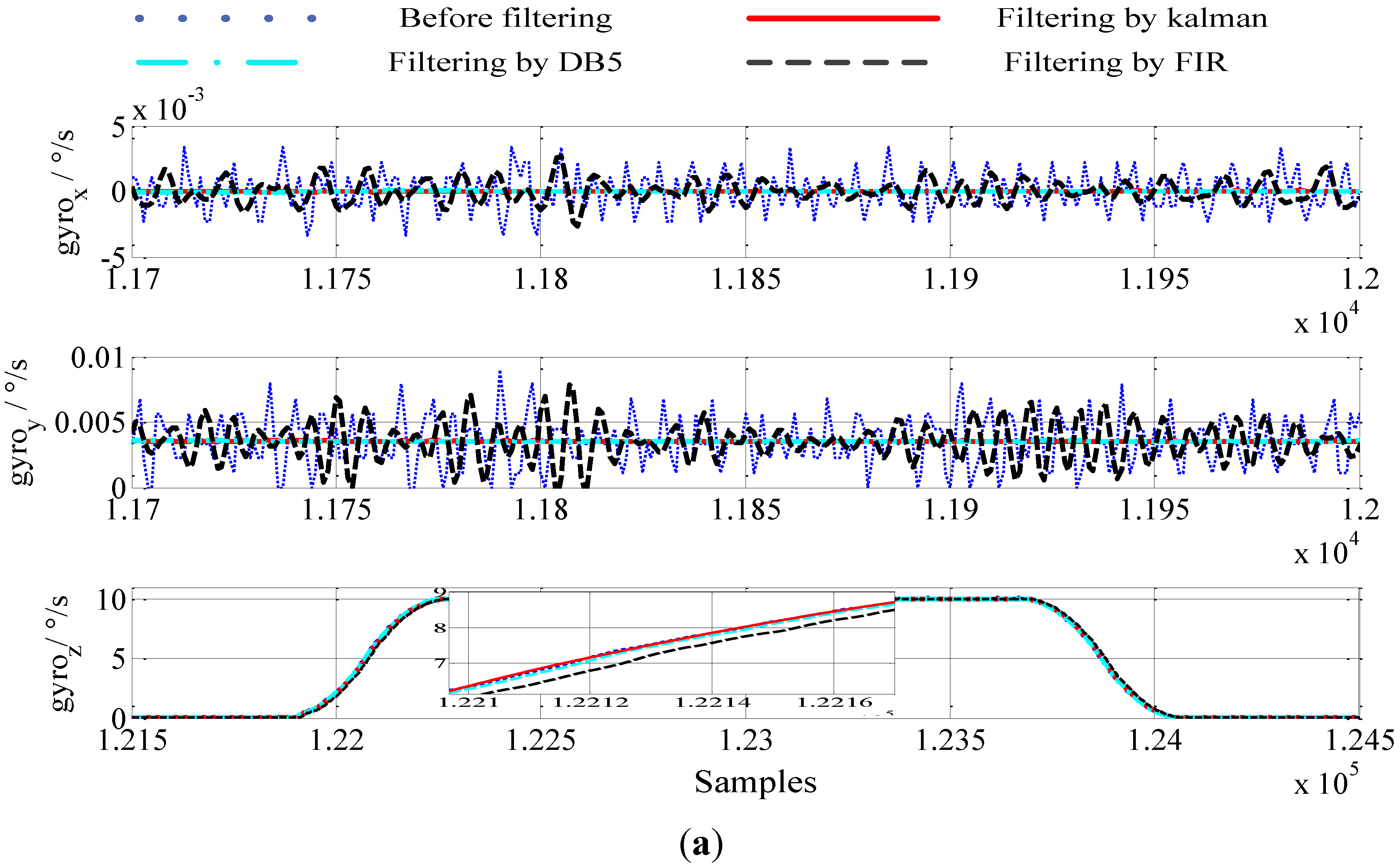
Figure 8.
IMU dates in static (a) gyro dates (b) accelerometer dates.
Figure 8.
IMU dates in static (a) gyro dates (b) accelerometer dates.
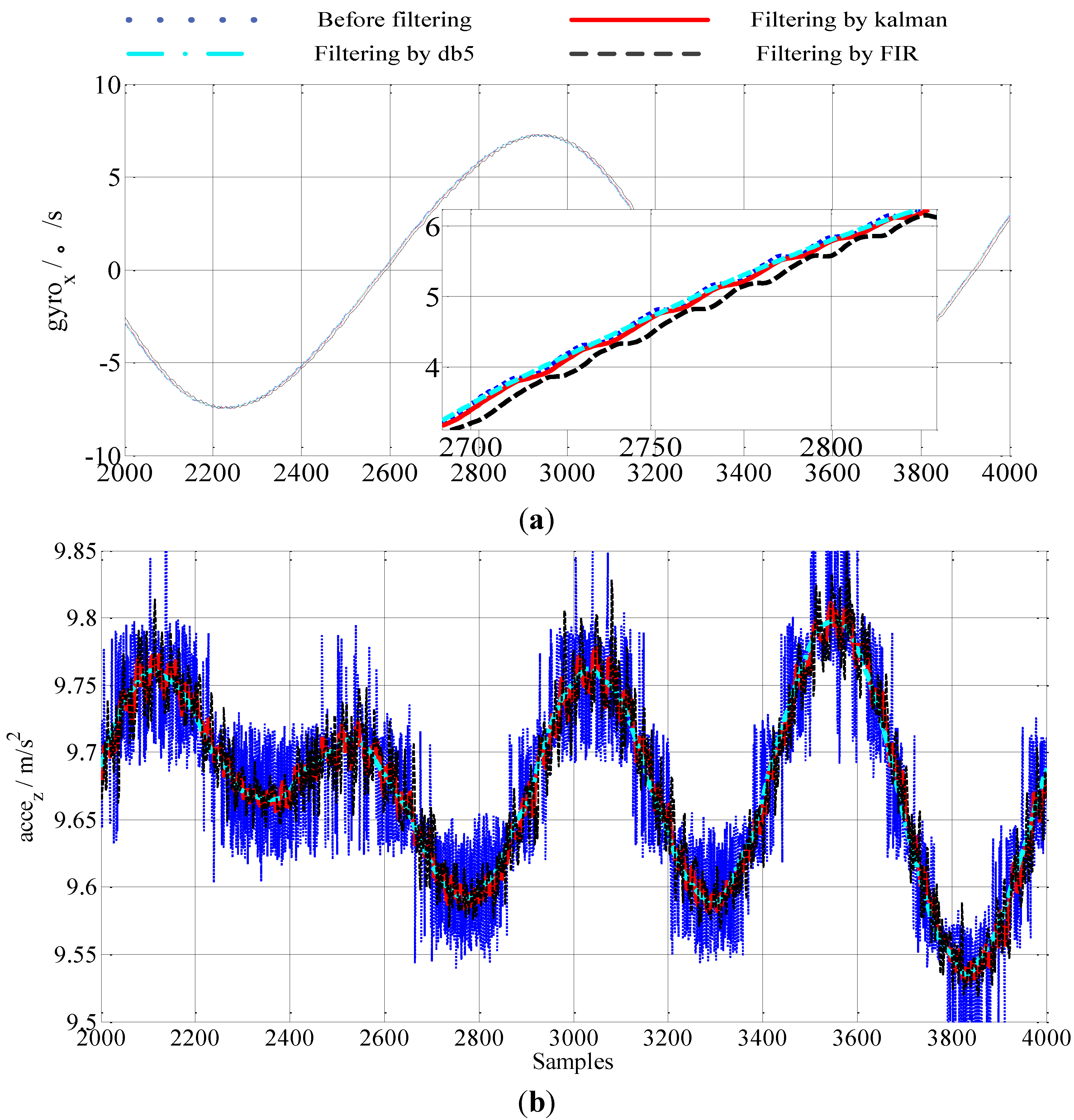
In
Figure 8, the IMU is kept static firstly. Then, the IMU rotates around axis
z by
. Lastly, we keep the IMU static again. The blue dotted line denotes the output of the accelerometers and the gyros before filtering. The red solid line denotes the output of the accelerometers and the gyros after filtering by the online parameters-adjusted Kalman filter. The green dot dash line denotes the output of the accelerometers and the gyros after filtering by the wavelet filter. The wavelet function is the MATLAB wavelet function, db5, and the level of decomposition is 5. The black dashed line denotes the output of the accelerometers and the gyros after filtering by the FIR Filter. Comparing the results before and after filtering, it can be concluded that the measurement noise in the IMU can be effectively eliminated by the Kalman filter proposed in this paper and the wavelet. The filtering result of FIR is worse than the results of the other two filters, and there is an obvious time-delay when the IMU rotates.
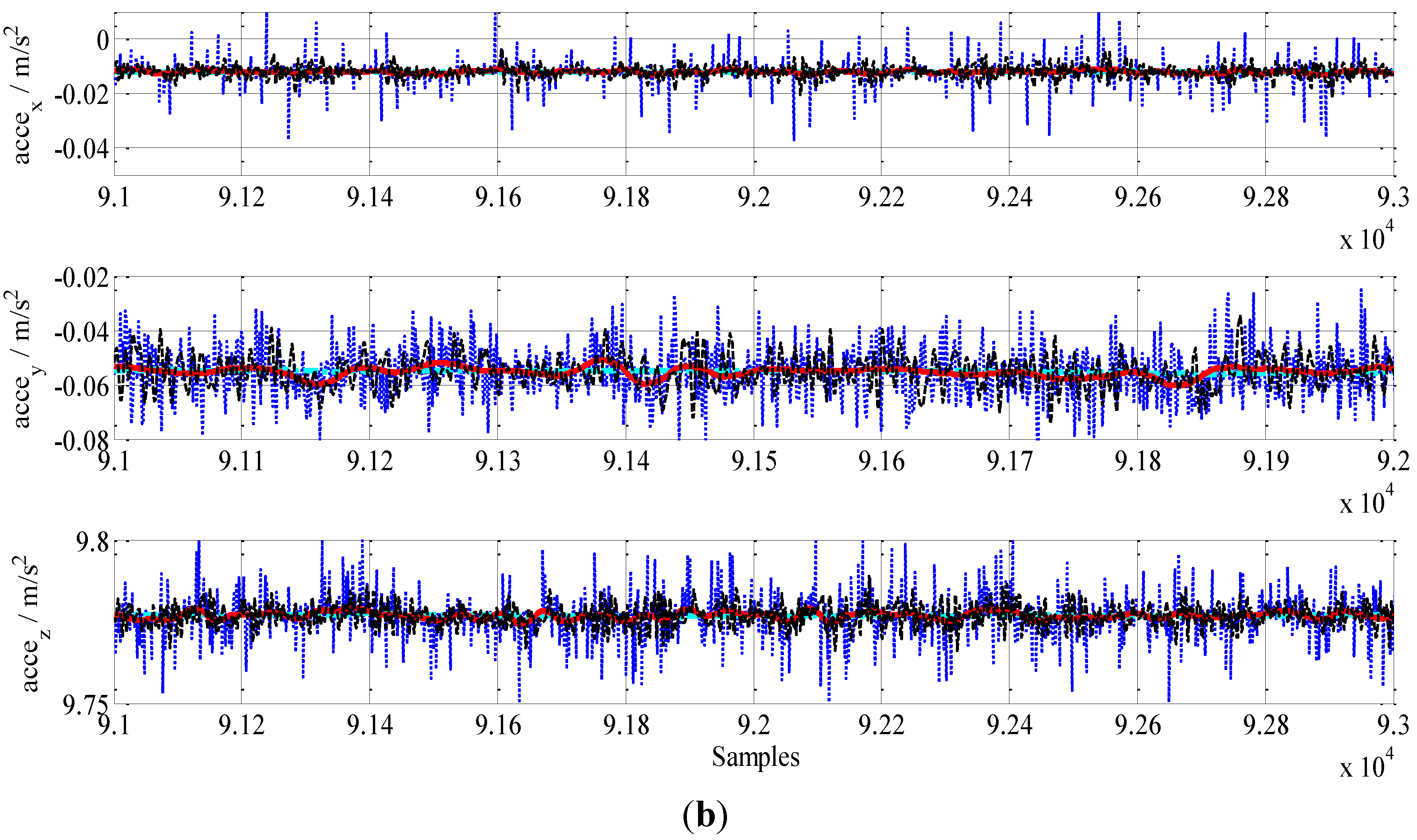
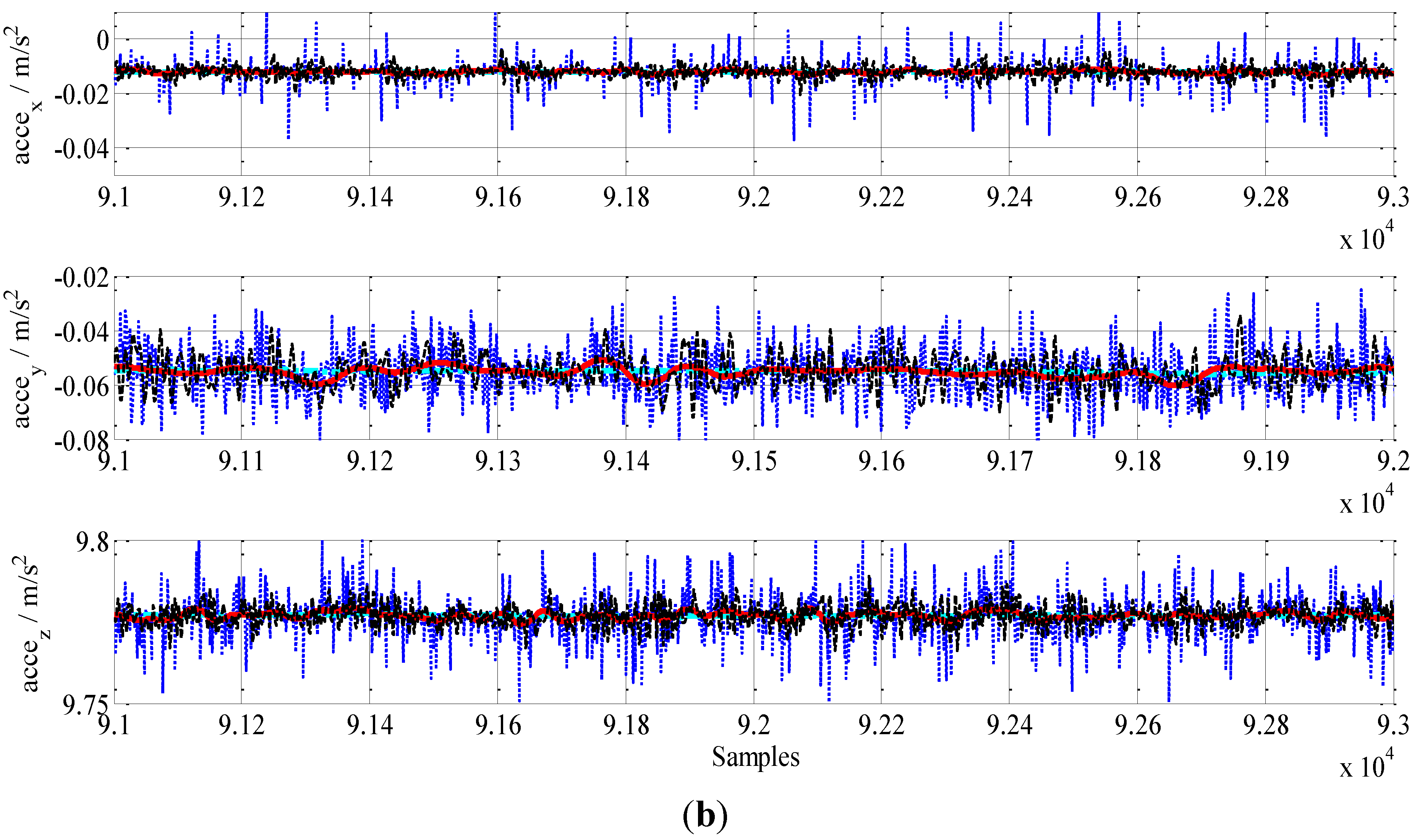
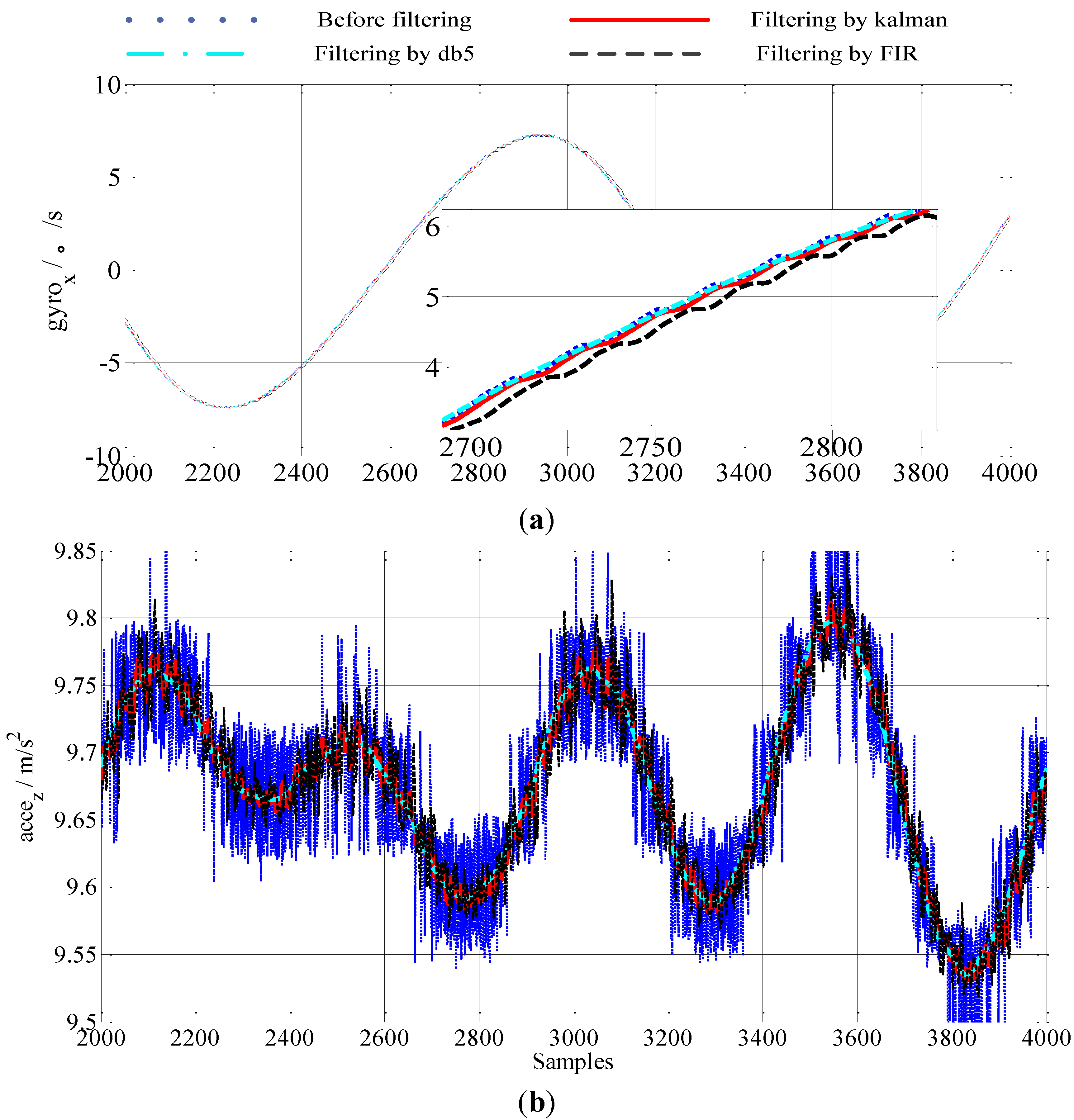
In order to test the performance of the online parameters the adjusted Kalman filter proposed in this paper in a dynamic environment, the IMU outputs in a swinging case are used.
Figure 9 shows the results before and after filtering the IMU outputs in the swinging case. From
Figure 9, we can conclude that the filtering result of the wavelet filter is smoother than the other two filtering results. The filtering result of the online parameters-adjusted Kalman filter is better than the result of the FIR filter. From
Figure 9 we can also conclude that the filtering results of the wavelet filter and the online parameters- adjusted Kalman filter can trace the motion of the carrier, while the filtering result has an obvious time-delay caused by the FIR filter in the swinging case. Although the delayed time of the FIR filter can be compensated accurately, the high order and the time-delay compensation would result in a great computational burden.
Figure 9.
IMU data in swinging (a) gyro dates (b) accelerometer dates.
Figure 9.
IMU data in swinging (a) gyro dates (b) accelerometer dates.
Because the parameters of the FIR are optimal when the IMU is in the static case, the filtering result of the FIR filter in the static case is better than that in the swinging case. Moreover, the measurement noise in the real environment is more complex,
i.e., when the ship is sailing on the sea, and the filtering result of the FIR filter would become worse because the filter parameters are set for a special situation, so comprehensively considering the filtering results in
Figure 8 and
Figure 9, we can conclude that the online parameters-adjusted Kalman filter is more suitable for a real-time system.
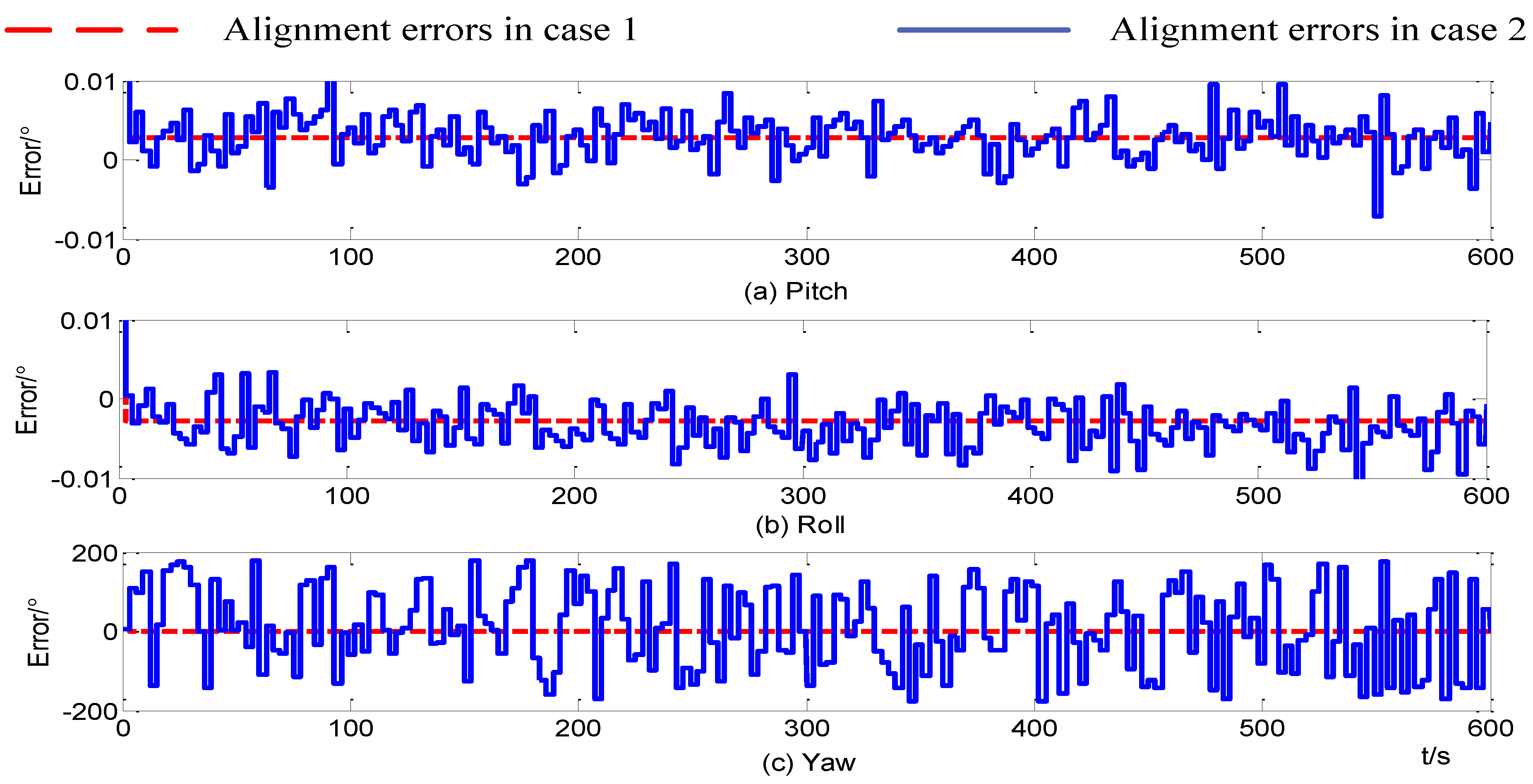
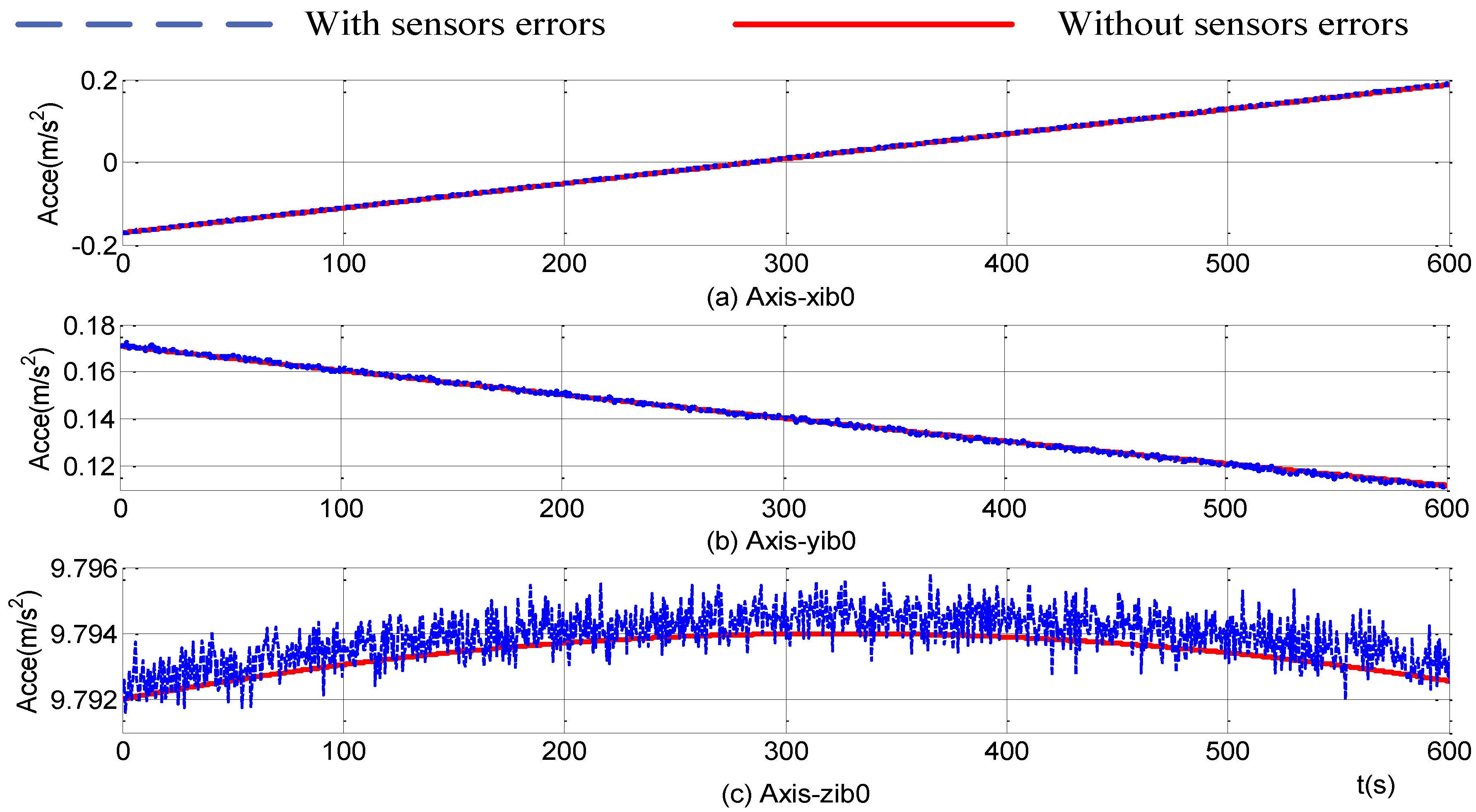
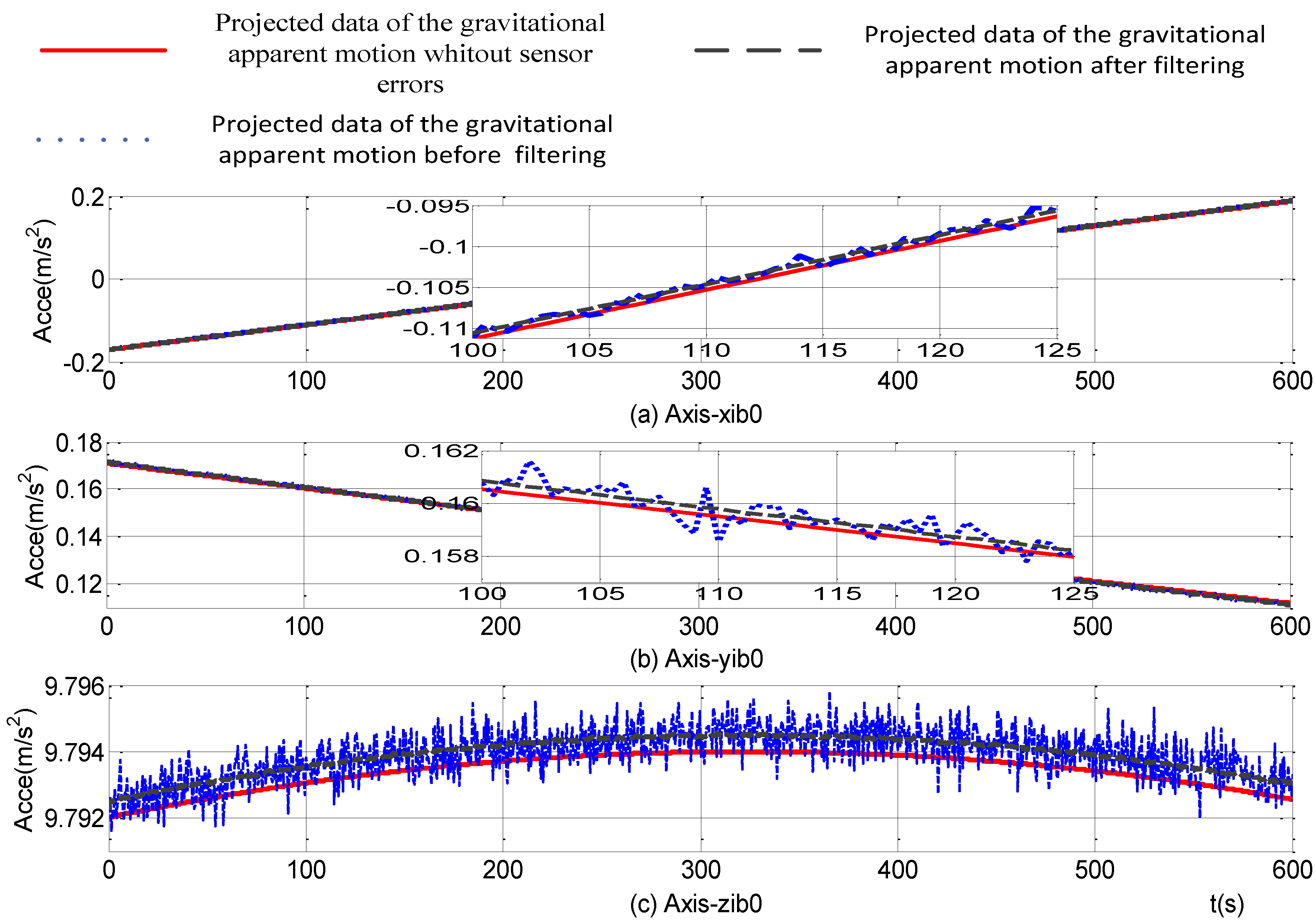
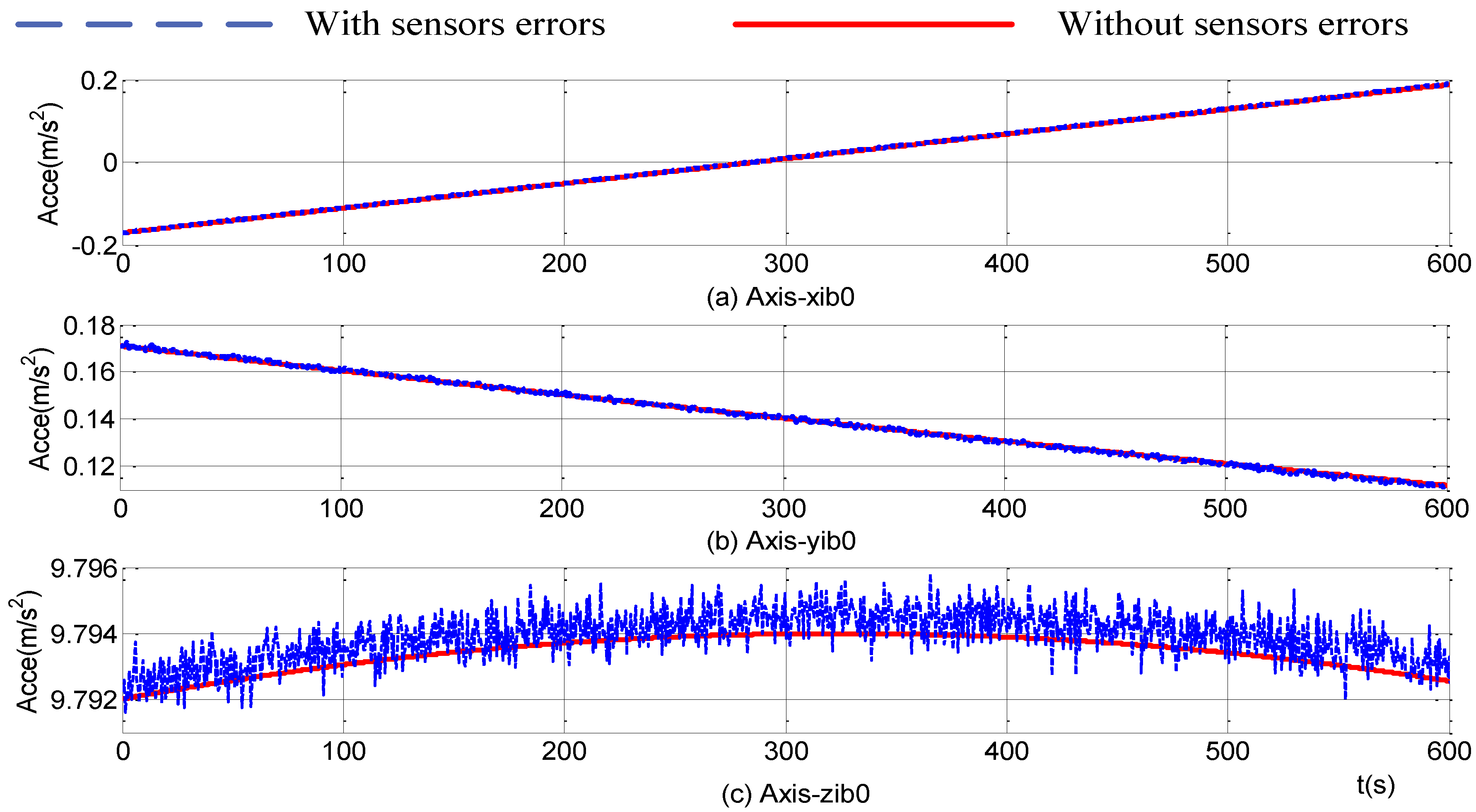
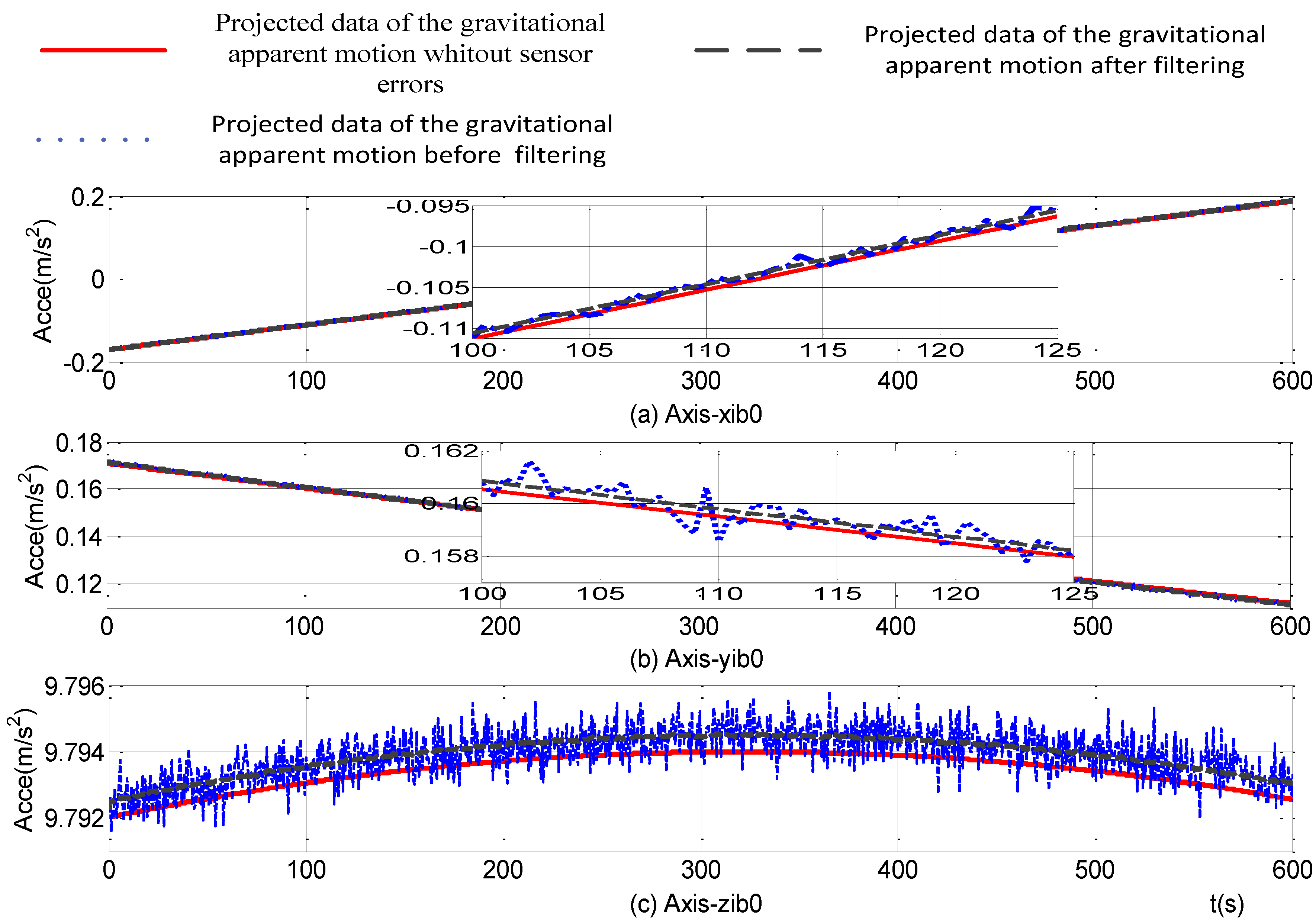
The introduction of online parameters-adjusted Kalman filter to the self-alignment of the SINS based on the three different vectors of gravitational apparent motion in the inertial frame and the projections of the gravity vectors measured by accelerometers are shown in
Figure 10. From
Figure 10, the projections of the gravity in the inertial frame, which are measured by accelerometers, are smoother and most of the random noise disturbance is eliminated. Compared with the theoretical gravity in the inertial frame without any IMU measurement errors, constant values exist because of the constant errors of the accelerometers.
Figure 10.
Projections of gravitational apparent motion in the inertial frame.
Figure 10.
Projections of gravitational apparent motion in the inertial frame.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}