1. Introduction
The artificial fish swarm algorithm (AFSA) is one of the state-of-the-art swarm intelligence approaches, which was proposed by Li Xiaolei in 2002 [
1]. It is inspired by the autonomous collective movement of artificial fishes (AFs) and their various social behaviors. Its characteristics of global search, quick convergence rate, and efficient search are based on modern elicitation methods [
2,
3]. After AFSA appeared, it offered new ideas to solve the optimization problems in signal processing [
4,
5], neural network classifiers [
6,
7], data mining and clustering [
8,
9], multi-objective optimization [
10,
11] and PID controller parameters optimization [
12],
etc.Nevertheless, the standard AFSA (SAFSA) has not been further considered by researchers, due to its complexity in comparison with other swarm intelligence algorithms in this domain, particularly particle swarm optimization (PSO), whereas the results of SAFSA are not better than those of PSO [
13]. PSO is another swarm intelligence algorithm that simulates the natural evolutionary process to solve complex optimization problems. It has been successfully utilized in optimization problems, such as the multidimensional knapsack problem, the economic and economic statistical designs, the complex network reliability problem [
14,
15,
16,
17], and so on. However, the reasons for SAFSA’s inefficiency are high structural and computational complexities, lack of using AFs’ previous experiences, lack of appropriate balance between exploration and exploitation to improve the optimization process. Fortunately, the optimal AFSA (OAFSA) with improvement on
Visual and
Step parameters to keep a balance between exploration and exploitation, has been utilized in various applications [
5,
7,
18]. More noteworthy is that a novel AFSA (NAFSA) was proposed to conquer all weaknesses of SAFSA and first used for data clustering by Yazdani in 2013 [
19]. In NAFSA, different stages of SAFSA are modified to eliminate the demerits, and, thus, improve the efficiency of the algorithm. The modifications include reducing the structural complexity as well as the computational complexity of the algorithm, determining a balance between the exploration and exploitation during the optimization process, and also adopting the AFs’ previous experiences to improve the optimization process.
On the other hand, the FOG error coefficients recalibration is to identify FOG error parameters accurately after operating for a period of time. It is necessary to recalibrate the FOG error coefficients because they would be slightly changed by environmental disturbances and the aging of the fiber coils [
20,
21]. Otherwise, the accuracy of FOG-based strapdown inertial navigation system (SINS) would be decreased by these uncalibrated error coefficients [
22,
23,
24]. Therefore, making the recalibration of FOG error coefficients during a specific interval according to FOG’s instability is necessary to maintain the accuracy of FOG-based SINS. However, the conventional expensive and high-precision turntable calibration method and systematic calibration method have the nature of high workload and costs, and the observable characteristic of different parameters is not the same [
25]. In addition, its reference information is provided from external equipment so that the calibration precision is dependent on the accuracy of the external equipment [
26]. The high workload and costs of conventional calibration method are also not affordable for low costs applications. Therefore, the focus on FOG error parameters’ recalibration to eliminate these drawbacks is always a hot research point.
The OAFSA was utilized for FOG random drift modeling in the navigation applications of AFSA in 2012 by Wang Tingjun [
27]. Meanwhile, the OAFSA also used for the real-time ring laser gyroscope bias temperature error compensation in 2014 by Yu Xudong [
28]. Moreover, Gao Yanbin has successfully adopted the OAFSA to calibrate the error parameters of FOG and verified the feasibility of OAFSA on FOG error coefficients recalibration [
29,
30]. However, OAFSA only balanced the exploration and exploitation abilities during the optimization process by the modification on AFs’
Visual and
Step parameters. Additionally, the secondary initialization method after certain times of OAFSA optimization manually increased the non-autonomous property of the OAFSA. But the structural and computational complexities of OAFSA remain and the AFs’ previous experiences are not used for improving the convergence rate. Therefore, solving these issues and letting the NAFSA recalibrate the FOG error coefficients are of great value to improve the overall navigation precision of FOG-based SINS.
The Monte Carlo simulation (MCS) method is a broad class of computational algorithms that relies on repeated random sampling to obtain numerical results [
31]. In this research, it is adopted to simulate the NAFSA process for increasing the credibility of FOG error coefficients recalibration results; hence, the computational results are closer to real conditions. Furthermore, it has the priority of reducing workload and costs over conventional expensive and high-precision turntable calibration methods. So the overall advantages of the MCS-NAFSA for FOG error parameters identification are (1) that the algorithm’s structural and computational complexities are reduced to release the high computational cost; (2) that the algorithm’s convergence rate is improved by adopting AFs’ previous experiences during AFs optimization process; (3) that no external reference information is introduced into the identification process; (4) that the high workload and costs in conventional calibration method are decreased greatly; and (5) that the non-autonomous characteristic of OAFSA on FOG error parameters recalibration is avoided. Therefore, the hybrid MCS-NAFSA technique that utilized on FOG error parameters recalibration is the main contribution of this research.
The rest of this paper is organized as follows. In
Section 2, the SAFSA and its disadvantages on FOG error parameters recalibration are first presented. Then, the OAFSA and the corresponding secondary initialization method on FOG error parameters recalibration are briefly dedicated. Finally, the NAFSA and its advantages on FOG error parameters recalibration are described with details.
Section 3 indicates the FOG error parameters MCS-NAFSA implementation procedures. After that, the MCS-NAFSA FOG error parameters simulation is conducted, and the results are discussed in
Section 4. Next,
Section 5 demonstrates the FOG-based SINS navigation experiments and discussion with FOG error parameters recalibrated by NAFSA.
Section 6 concludes this article.
5. Experiments and Discussion
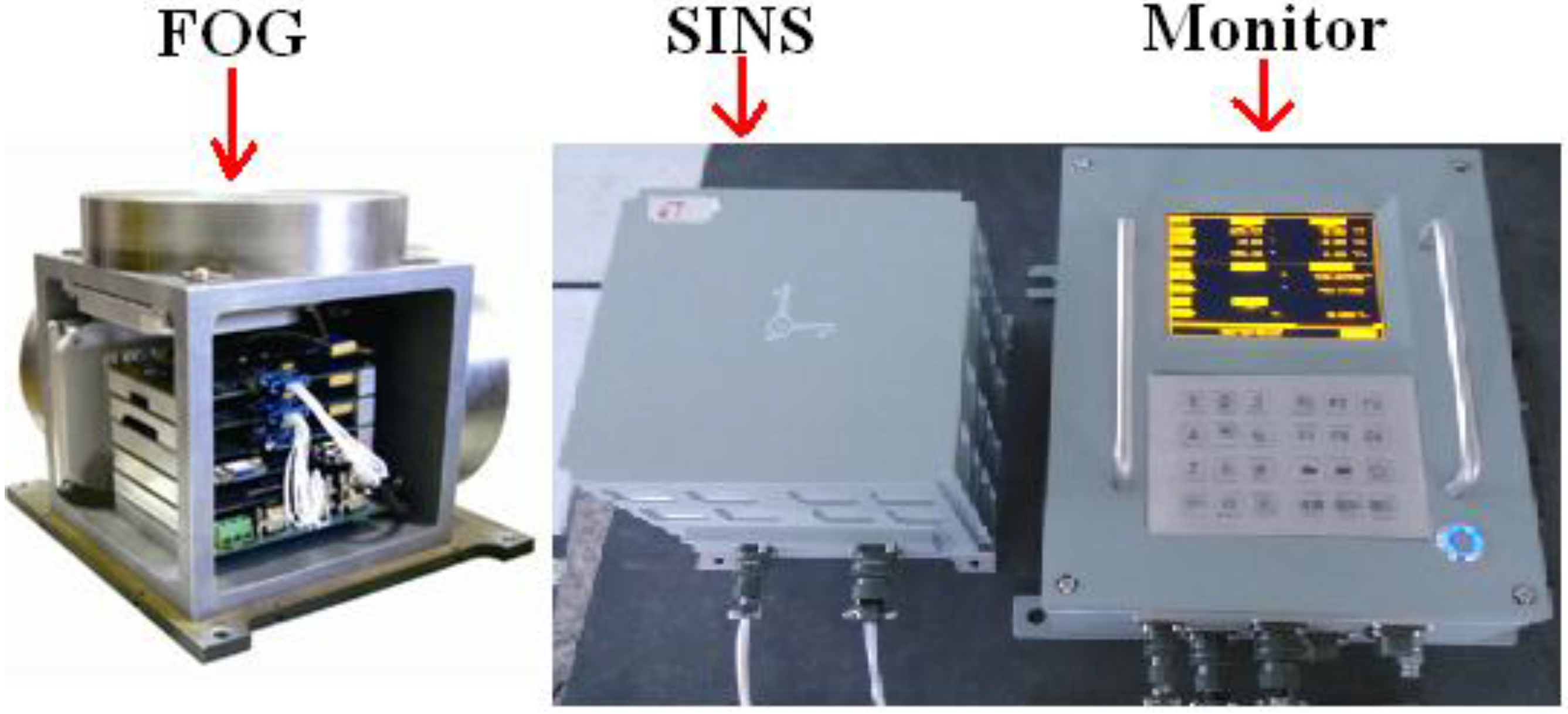
To validate the feasibility and priorities of the NAFSA on FOG error parameters optimization, the static and dynamic navigation experiments were conducted, respectively. Before these two experiments, the FOG error parameters were calibrated by using a turntable with 24-position method. The navigation information output results are also based on the FOG error parameters that are calibrated by this 24-position method. Additionally, for comparison with OAFSA and NAFSA in navigation experiments, the stored experimental data were also used for navigation mechanization with FOG error parameters identified by OAFSA and NAFSA.
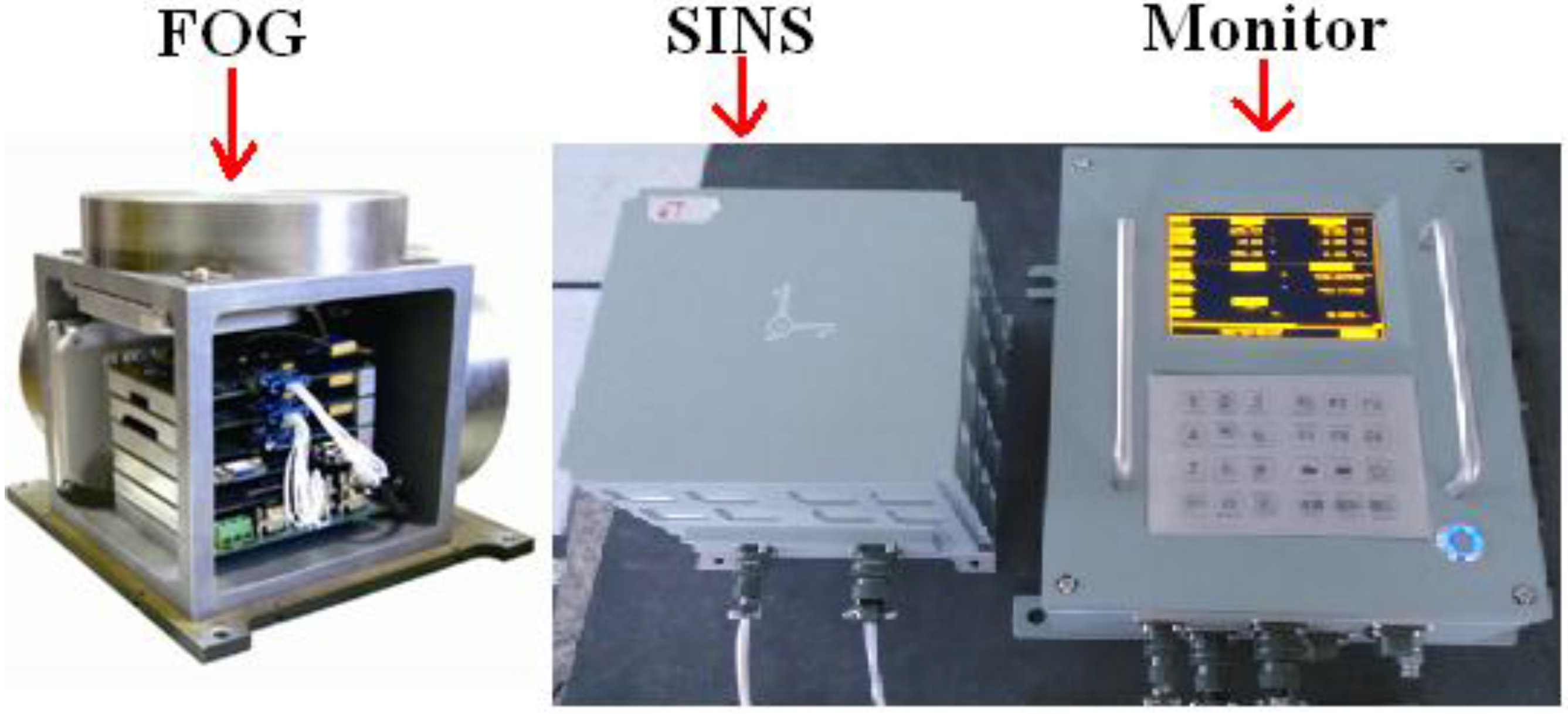
For both experiments, the FOG-based SINS was developed by Inertial Navigation and Measurement & Control Technology Institute at Harbin Engineering University. The main performance indicators of FOG are demonstrated in
Table 4.
Figure 5 shows the FOG and the FOG-based SINS in experiments.
Table 4.
FOG performance indicators.
Table 4.
FOG performance indicators.
| Parameter Items | Performance Indicators |
|---|
| FOG dynamic range (°/s) | −800–+800 |
| FOG scale factor stability (ppm) | 10 |
| FOG bias instability (°/h) | 0.005 |
| FOG angular random walk (°/h1/2) | 0.0005 |
Figure 5.
The FOG and FOG-based SINS.
Figure 5.
The FOG and FOG-based SINS.
5.1. Static Navigation Experiment and Discussion
5.1.1. Experimental Procedures and Data Processing
In this section, a static navigation experiment is carried out. At the beginning, the FOG-based SINS and the corresponding monitor are installed on the marble benchmark that is used to eliminate external disturbances on system positioning precision. Then, the SINS is started, the turntable calibrated FOG error parameters and the initial navigation information (initial position and velocity) are loaded. After that, both the inertial measurement unit (IMU) output and the navigation information for 24 h are stored after the SINS completes the initial alignment process.
After obtaining the stored 24 h IMU output and navigation information, we first used the FOG data to recalibrate the FOG error parameters by OAFSA and NAFSA, respectively. Second, the navigation mechanization process was conducted again with the FOG error parameters optimized by OAFSA and NAFSA, respectively. Finally, the positioning error curves were plotted and the positioning error numerical results were obtained with the three methods introduced.
The positioning error is calculated by [
40,
41]:
where,
long0 and
lat0 are the initial longitude and latitude of the SINS, and
long and
lat are the calculated longitude and latitude.
R denotes the radius of Earth.
5.1.2. Experimental Results and Discussion
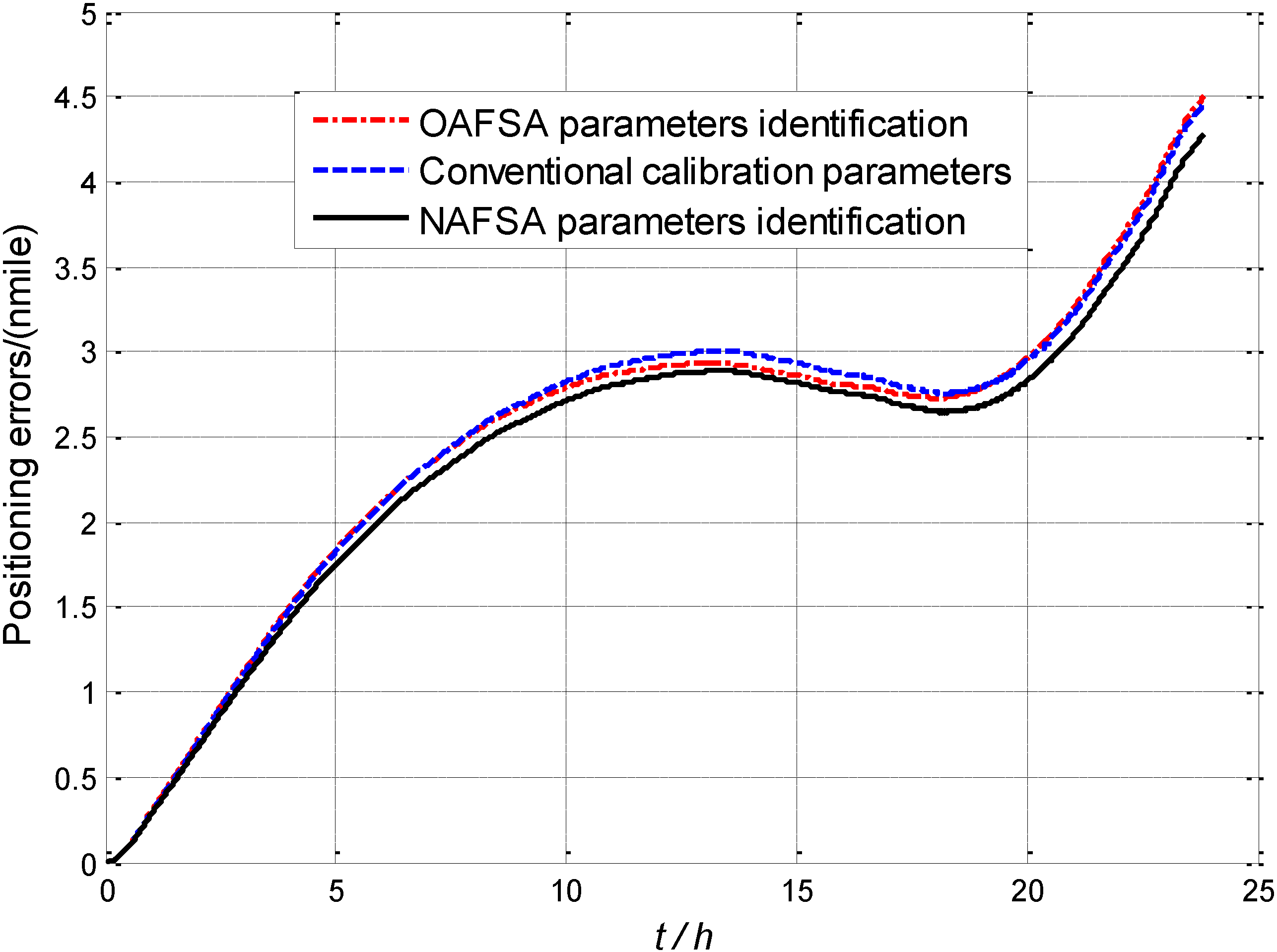
Figure 6 shows a comparison of positioning errors in 24 h static navigation experiment when the FOG error parameters are identified by the conventional calibration method, OAFSA and NAFSA, respectively. The red dotted positioning error curve represents the OAFSA FOG error parameters identification results. Additionally, the blue dotted curve represents the positioning error curve with FOG calibrated by conventional high-precision turntable method. Both curves present positioning precision of 4.5 nautical miles in 24 h static navigation, which shows that the OAFSA could substitute the conventional calibration method without using high-precision turntable [
29,
30]. Moreover, it is worth noting that the black solid curve in
Figure 6 denotes positioning precision of the NAFSA on FOG error parameters identification. The curve’s tendency demonstrated that after 5 h of navigation, the positioning error is lower than the other two methods and the precision is about 0.3 nautical miles better than the OAFSA in one day of navigation.
The corresponding numerical results of static positioning errors with the three different methods are shown in
Table 5. Both the conventional calibrated and the OAFSA recalibrated FOG-based SINS have about 4.5 nautical miles positioning error in 24 h. Meanwhile, the NAFSA recalibrated FOG-based SINS has 4.255 nautical miles of positioning error. Therefore, the static navigation experiment demonstrates that the NAFSA recalibrated FOG-based SINS is superior to that of the conventional calibrated and the OAFSA recalibrated FOG-based SINS.
Table 5.
Static positioning results of three different methods.
Table 5.
Static positioning results of three different methods.
| Methods | Conventional Calibration Method | OAFSA Identification Method | NAFSA Identification Method |
|---|
| 24 h positioning error (nautical mile) | 4.4895 | 4.4988 | 4.2550 |
Figure 6.
The comparison of positioning error with three methods.
Figure 6.
The comparison of positioning error with three methods.
5.2. Dynamic Navigation Experiment and Discussion
5.2.1. Experimental Procedures and Data Processing
In order to validate the feasibility and priorities of the NAFSA in real application conditions, a lake navigation experiment was also conducted in Qiandao Lake for a period of time. Firstly, the FOG-based SINS and the reference system, the difference global positioning system (DGPS) receiver, were installed in a ship. Secondly, after the FOG-based SINS finished the mooring alignment process at the starting point, the ship sailed successively with speed change, heading change, manoeuvres,
etc. At the same time, the reference DGPS information, IMU data and the self-developed FOG-based SINS navigation information were all collected and saved. Finally, the data was processed the same way as
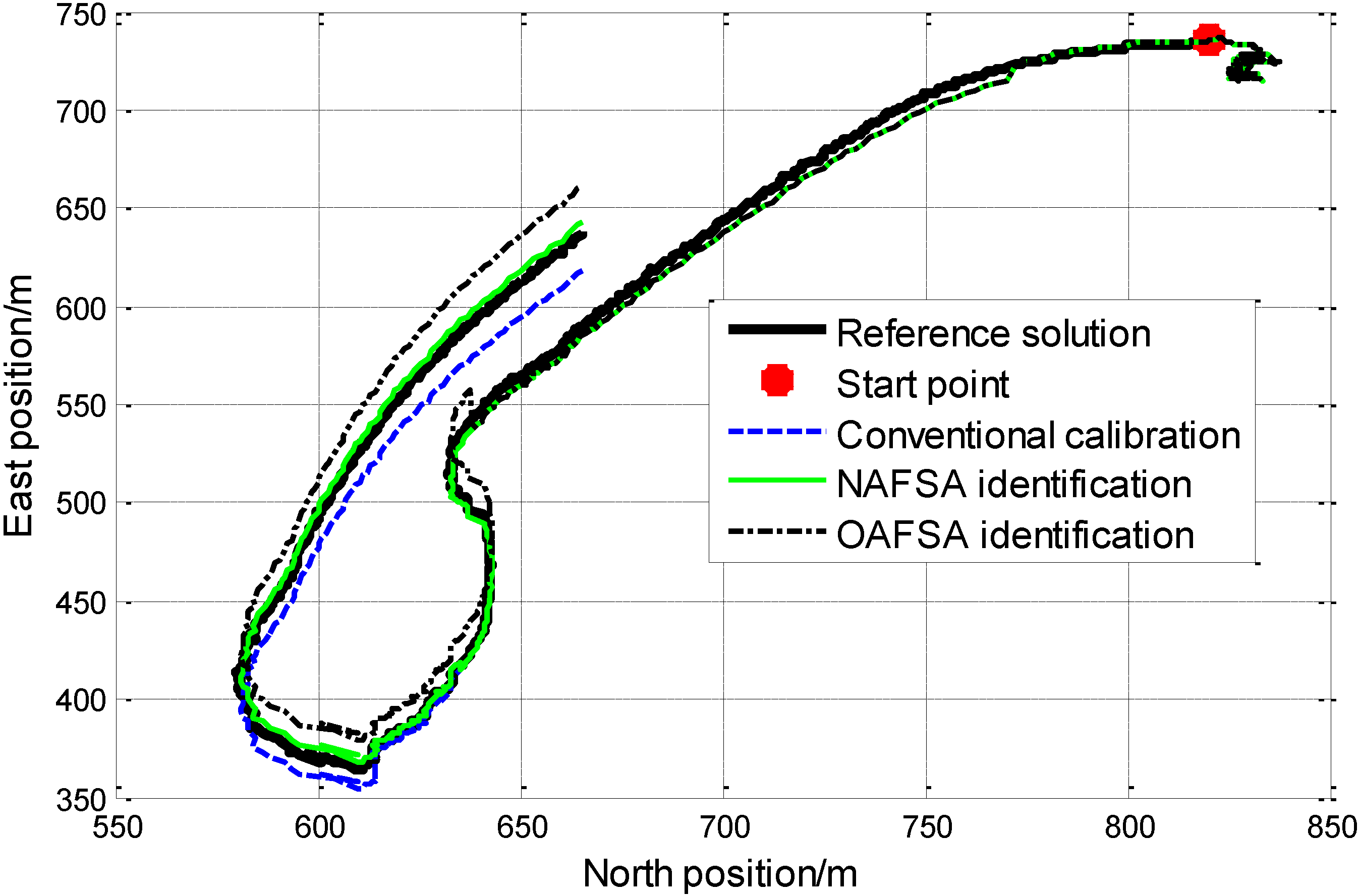
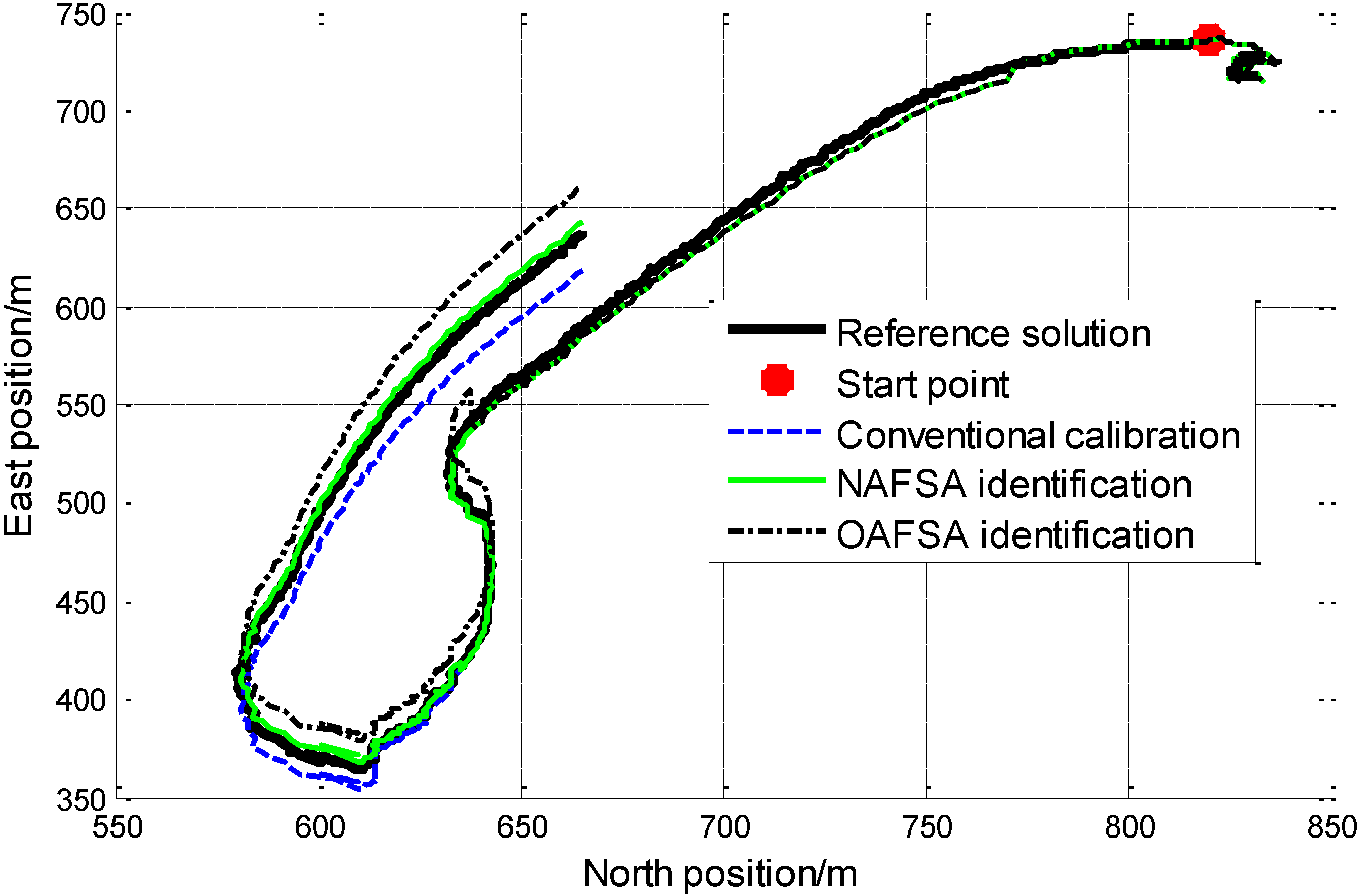
Section 5.1.1. The trajectories of the lake experiment with GPS and the SINS when FOG parameters are identified by three different ways are all demonstrated in
Figure 7. Moreover, the numerical results of the system positioning errors in both the North and East directions are calculated and listed in
Table 6.
Table 6.
Dynamic positioning errors of three different methods.
Table 6.
Dynamic positioning errors of three different methods.
| Methods | Conventional Calibration Method | OAFSA Identification Method | NAFSA Identification Method |
|---|
| North direction positioning error (m) | 5.1154 | 5.2131 | 5.0134 |
| East direction positioning error (m) | 20.0253 | 20.3580 | 8.1689 |
Figure 7.
Trajectory comparison between different methods.
Figure 7.
Trajectory comparison between different methods.
5.2.2. Experimental Results and Discussion
On one hand,
Figure 7, shows that the conventional calibration method, the OAFSA identification method and the NAFSA identification method on FOG error parameters all have the ability to implement the FOG error parameters calculation and reach different degrees of positioning precision in the lake experiment. On the other hand, the green curve shows that the NAFSA recalibration method is superior, such as better robustness when speed and heading change, better tracking capability during the whole navigation process, which means higher positioning precision. Moreover, by utilizing the NAFSA on FOG error parameters identification, some lower precision SINS would have better performance for parameters identification after a specific period of navigation.
The lake experiment positioning errors compared with reference solution at the end of the navigation are listed in
Table 6. We found that the conventional calibration method and the OAFSA identification method have almost the same positioning errors. The conventional calibration method has a North direction positioning error around 5.1154 m and East direction error about 20.0253 m. The OAFSA identification method has a North direction positioning error around 5.2131 m and an East direction error about 20.3580 m. While the NAFSA identification method has better performance in terms of positioning error, with a North direction positioning error of 5.0134 m, and East direction error of 8.1689 m. By comparing the North direction positioning errors with these three methods, the NAFSA method has only a slightly smaller positioning error. Furthermore, the NAFSA recalibration method could improve the East direction positioning error of the conventional calibration and OAFSA recalibration methods from about 20 m to 8.169 m, which could clearly demonstrate the priorities of the NAFSA recalibration method. Therefore, the NAFSA recalibration method is a more powerful choice in its engineering application for FOG error parameters recalibration.
All in all, in both experiments, the NAFSA recalibration method has advantages in workload and costs compared to the conventional calibration method. However, it presents better performance in long-term navigation precision and is more acceptable for actual engineering applications than previous OAFSA recalibration methods, which is mainly due to the lower structural and computational complexities and faster convergence rate of the NAFSA recalibration method.
6. Conclusions
After the FOG-based SINS operated for a period of time, the FOG would be vulnerable to the working environmental disturbances, such as gravitational field, magnetic field and thermal field, which cause nonreciprocal phase shifts except for the rotary movement by the vehicle itself. These exterior disturbances could influence the FOG error parameters’ stability directly or indirectly. Even though some advanced measures are taken to eliminate these effects, high-precision navigation application is far from enough.
This research work is based on one of the swarm intelligence algorithms, NAFSA, focusing mainly on its combination with MCS and utilization in FOG error parameters identification. The NAFSA has the advantages of lower structural and computational complexities and higher convergence rates than the previous OAFSA recalibration method during the optimization process. It also has lesser workload and costs requirements than the conventional FOG error parameters calibration methods. Furthermore, the non-autonomous property could be avoided when compared with the previous OAFSA recalibration method. Therefore, the NAFSA FOG error parameters recalibration method could implement longer recalibration interval time with higher precision in some harness application environments.
When the FOG-based SINS applied in navigation conditions, NAFSA-identified FOG error parameters could realize the SINS navigation process rapidly and accurately. Moreover, the NAFSA-identified FOG error parameters have better environmental adaptive ability, which means higher positioning accuracy and better tracking performance. Therefore, the NAFSA recalibration method has better ability than the conventional calibration method and the previous OAFSA in FOG error parameters recalibration application.
However, the AFSA on FOG error parameters recalibration is only in an exploratory phase and all the navigation experiments are based on the stored data. Thus, our work for the next stage is to realize the algorithm in real-time navigation.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}