
Bore-Sight Calibration of Multiple Laser Range Finders for Kinematic 3D Laser Scanning Systems

 and
and
Abstract
:1. Introduction
2. System Description and Mathematical Model
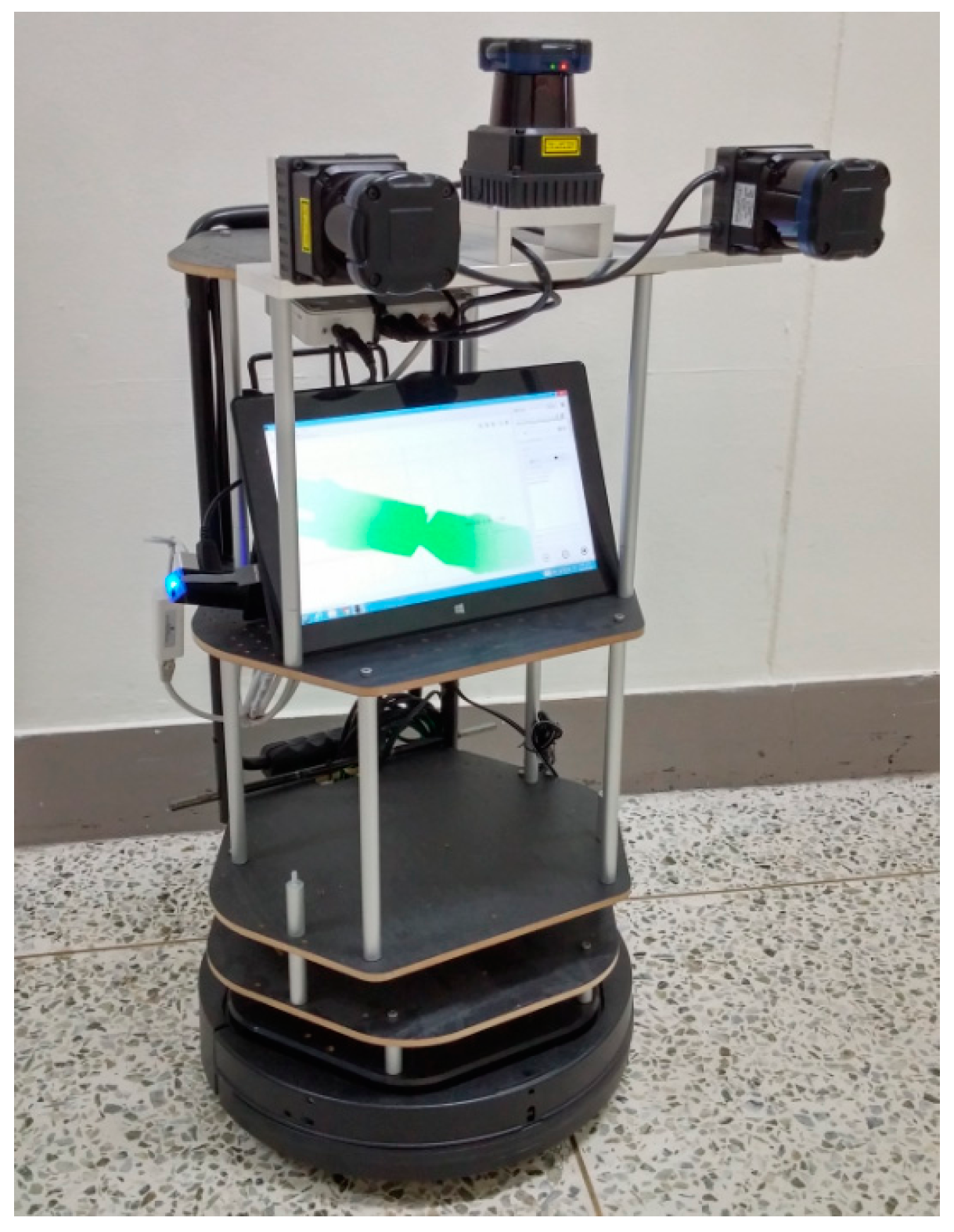
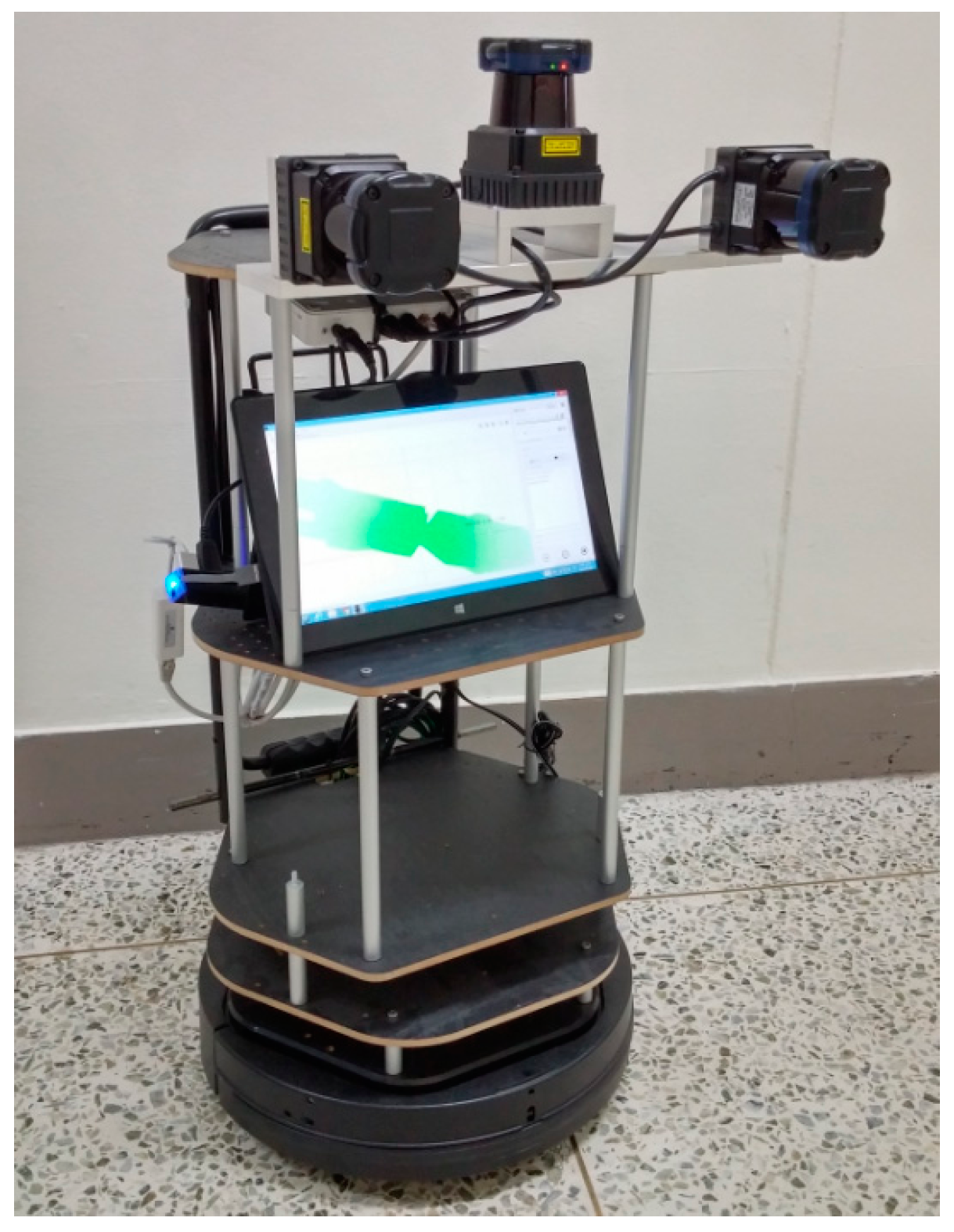
2.1. Kinematic 3D Laser Scanning System
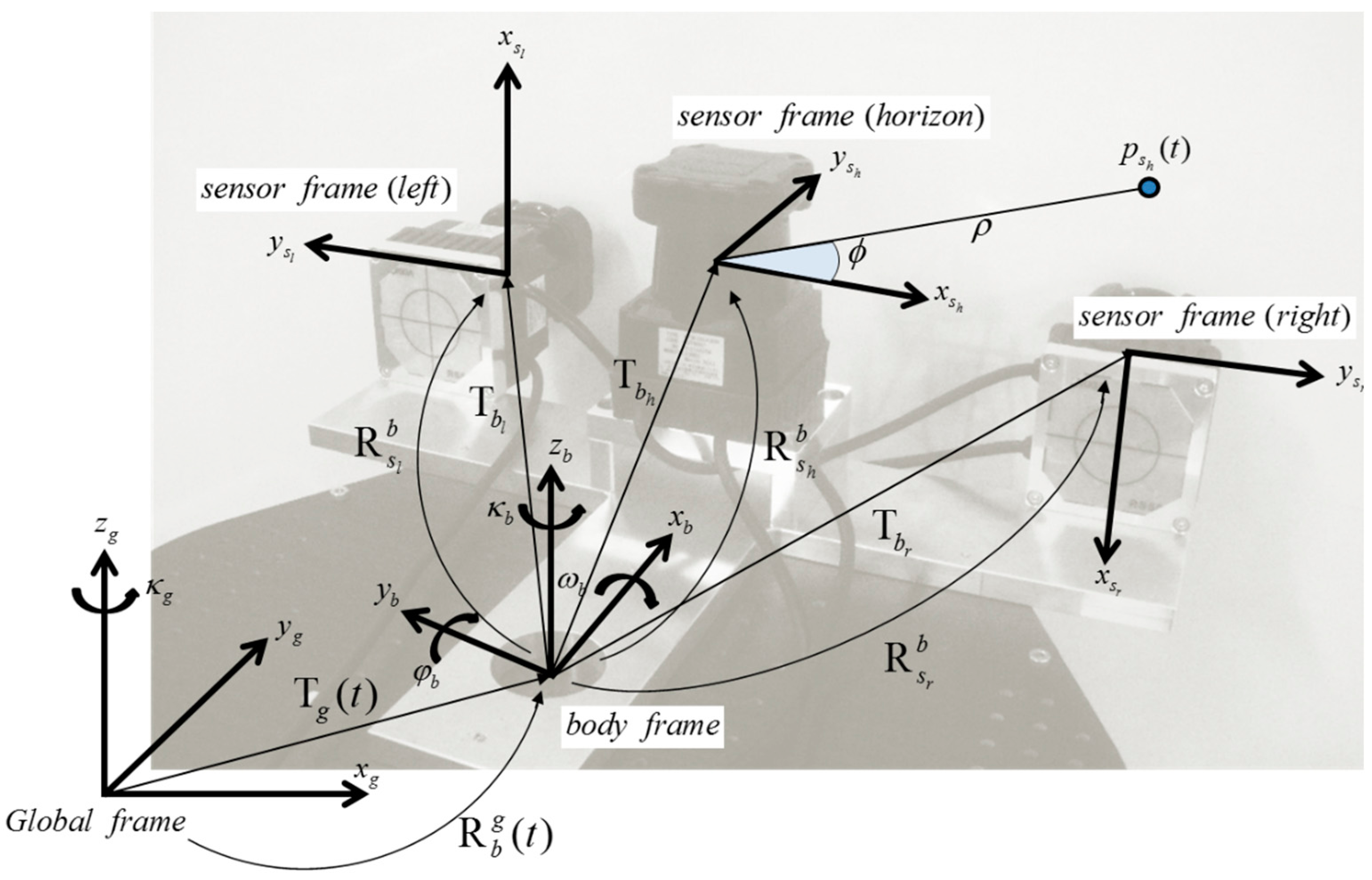
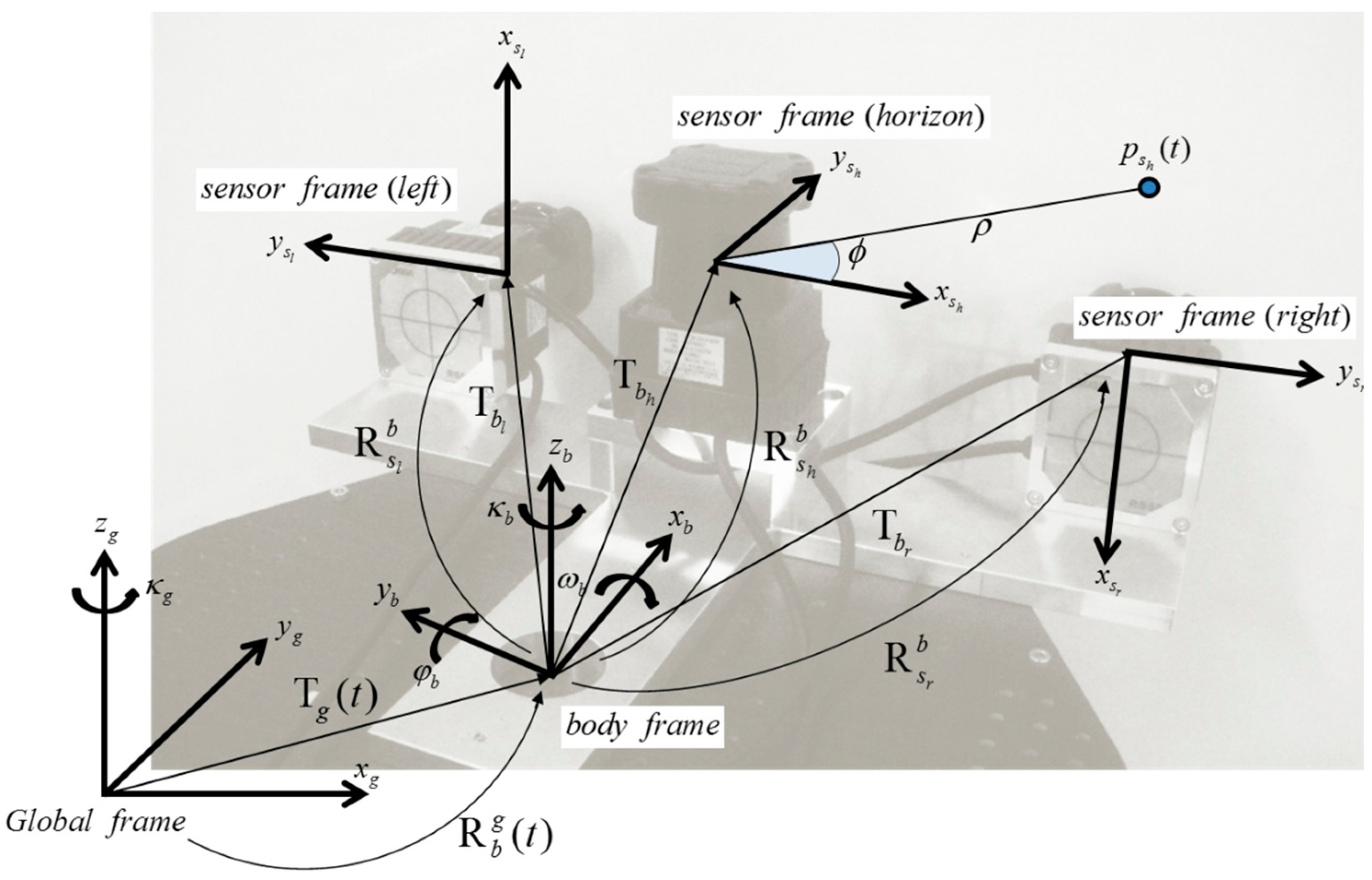
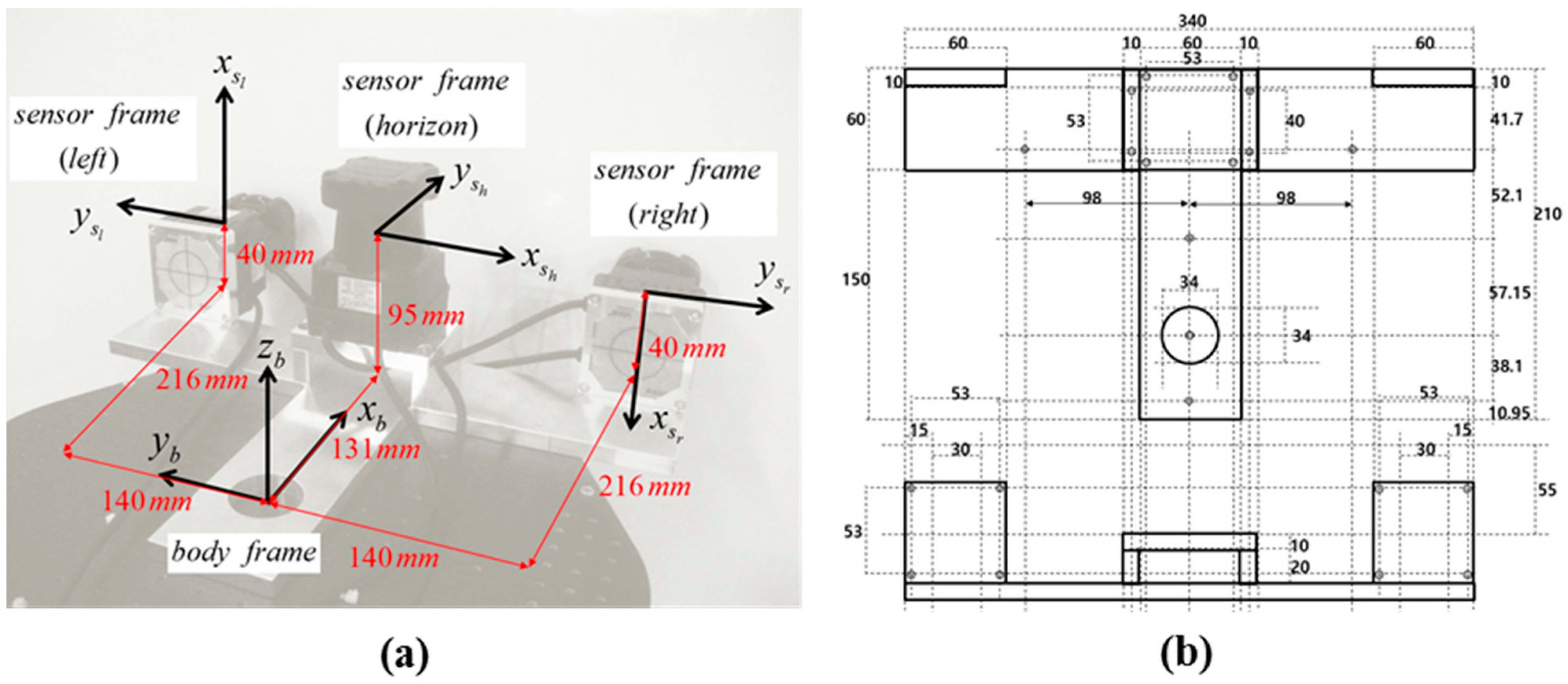
2.2. Coordinate System
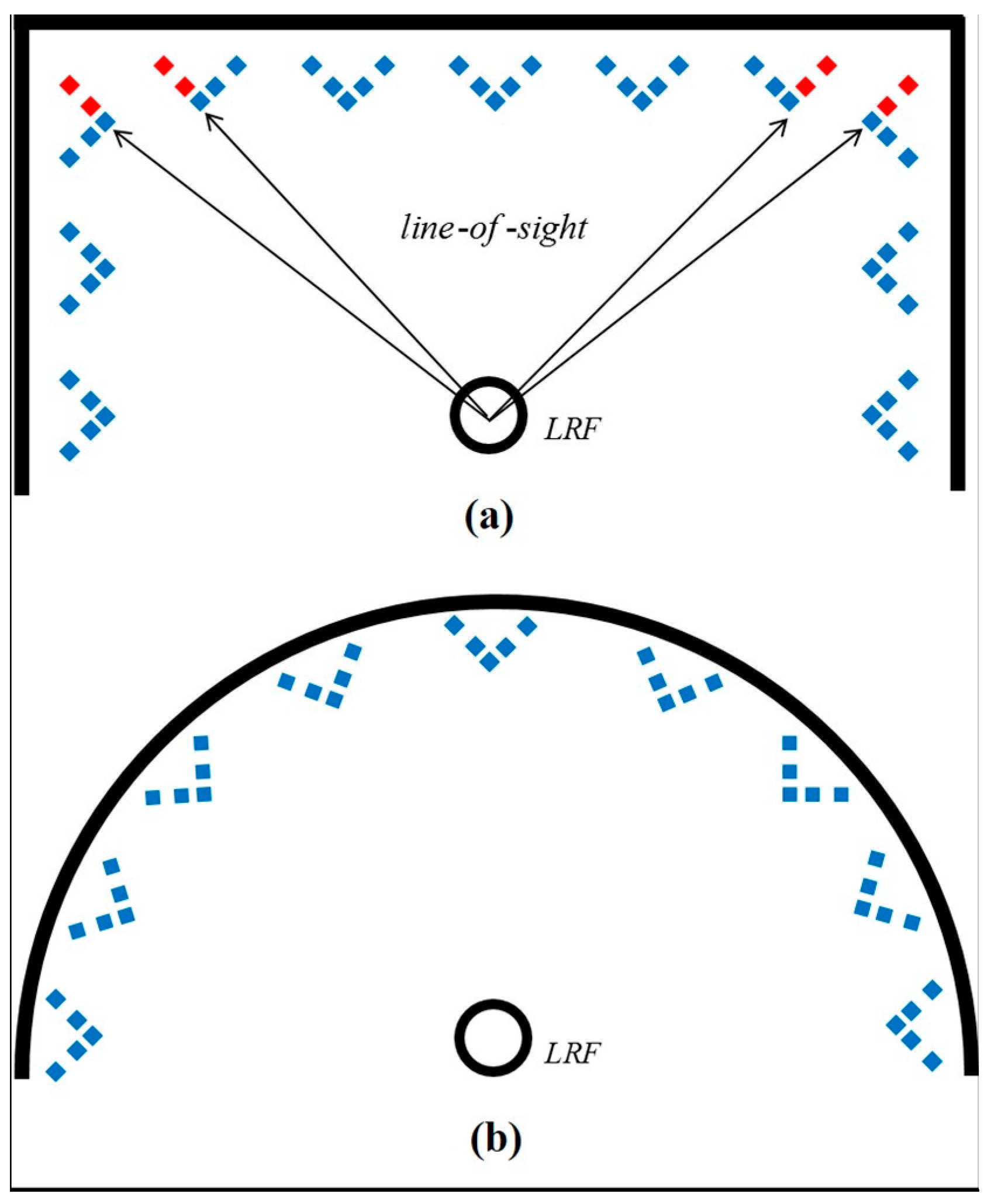
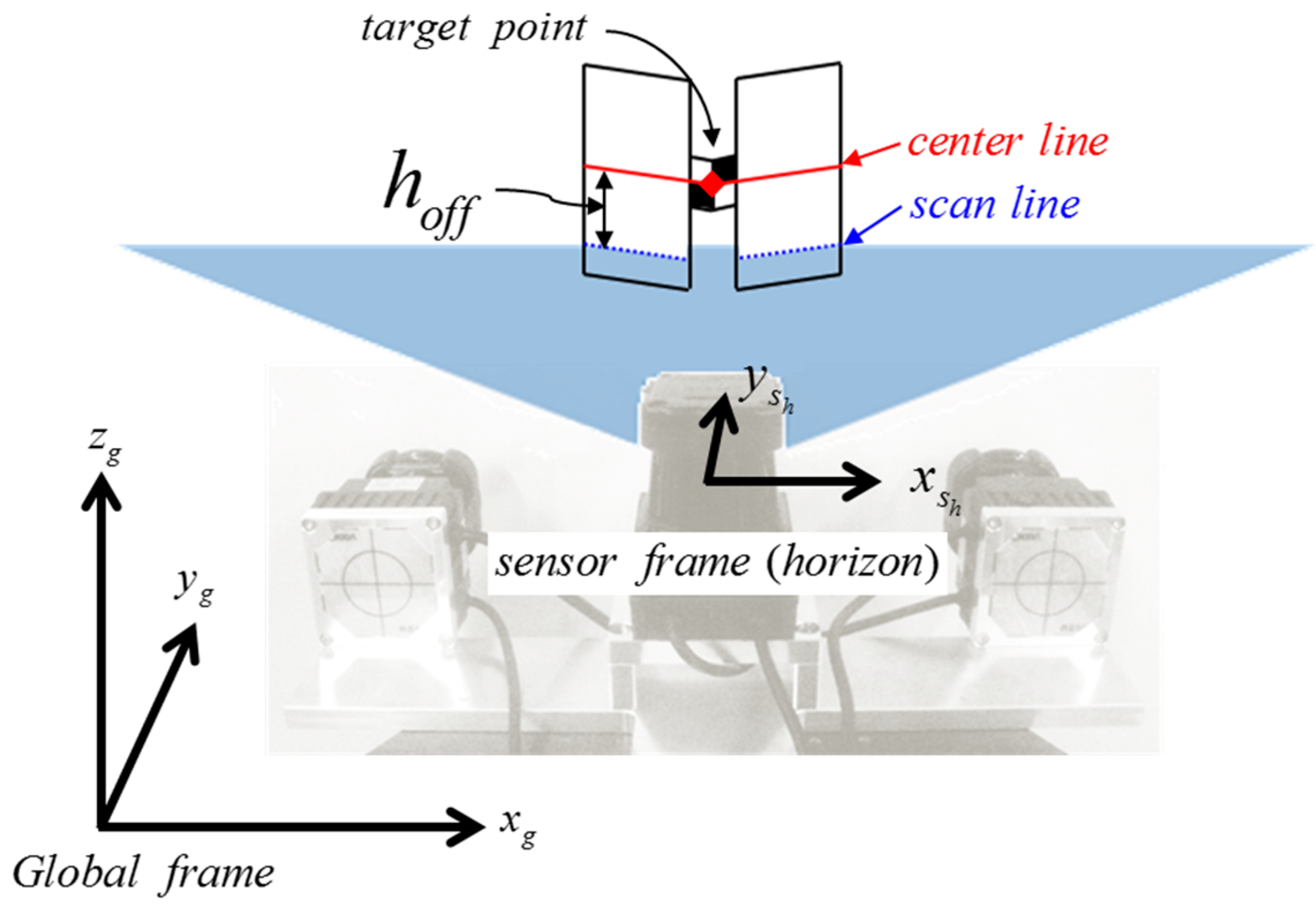
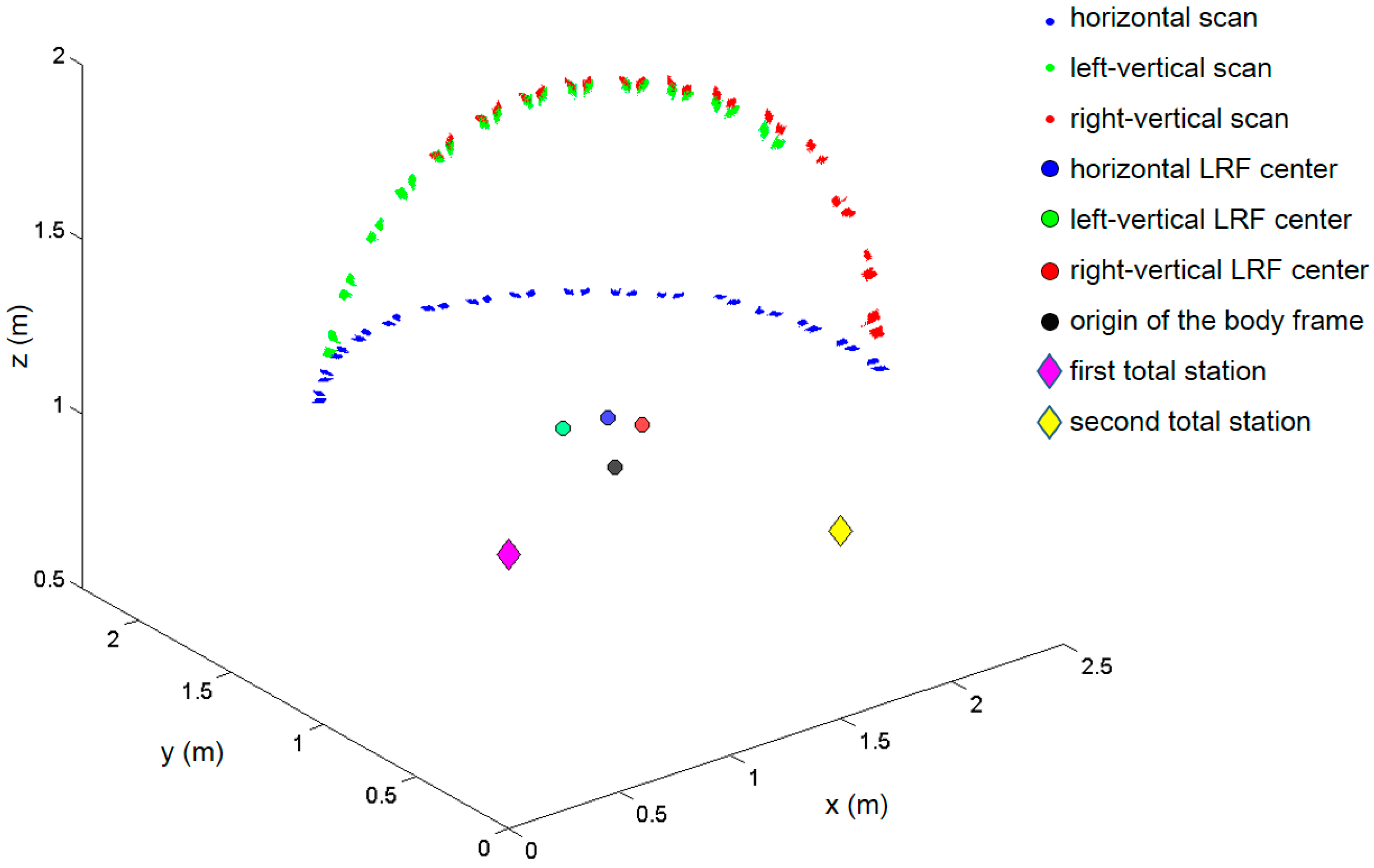
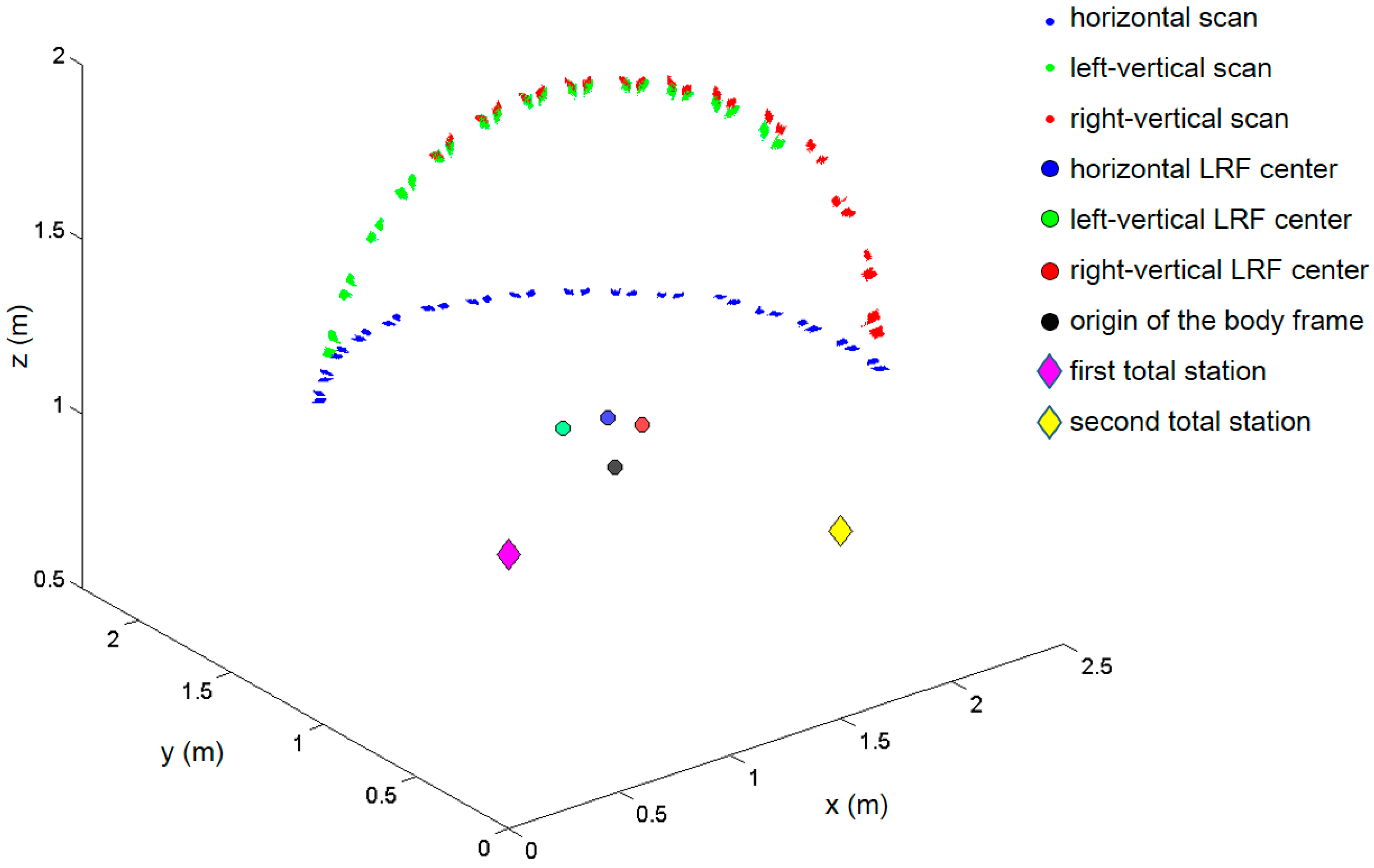
- The sensor frame (s) of the 2D LRF provides point information by means of the distance and angle in the sensor frame (s), which is then transformed to Cartesian coordinates as . The sensor frame is defined by its alignment on the platform body frame.
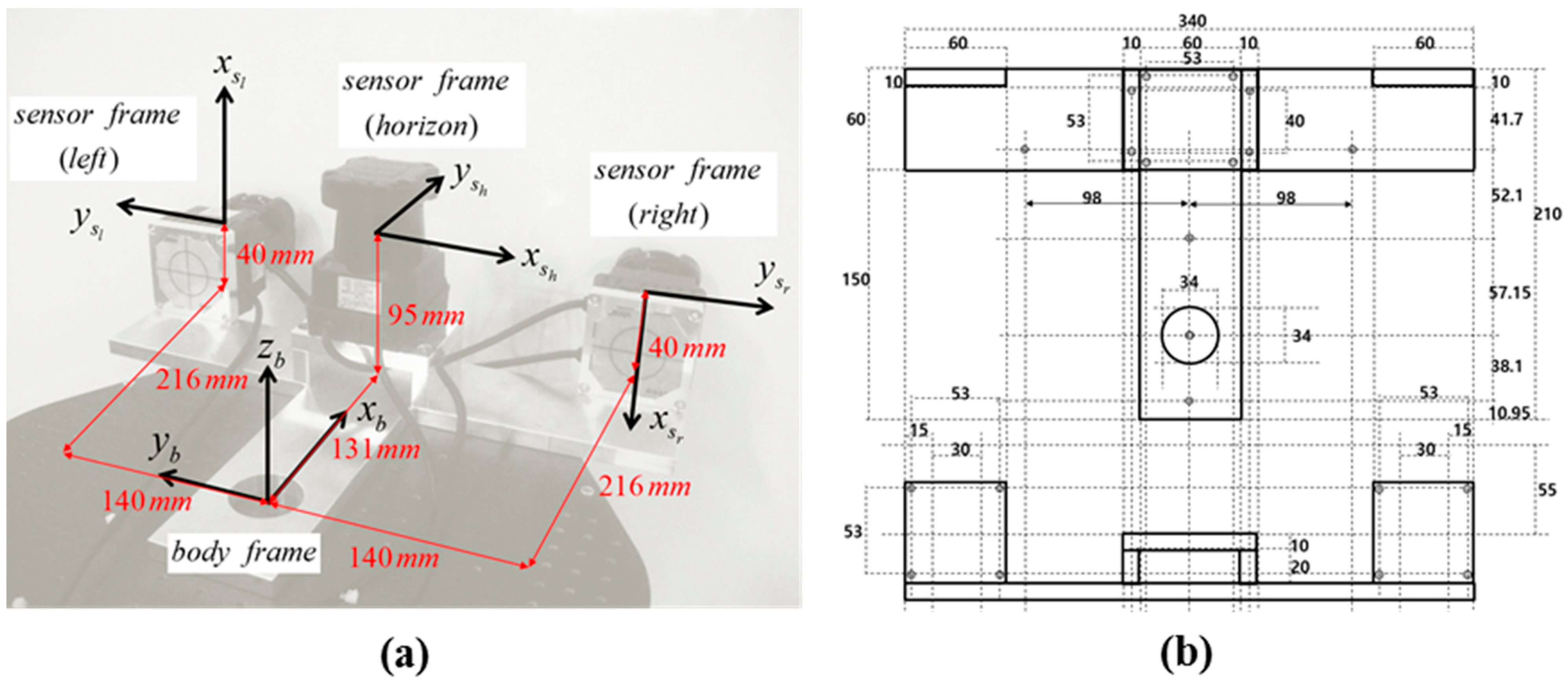
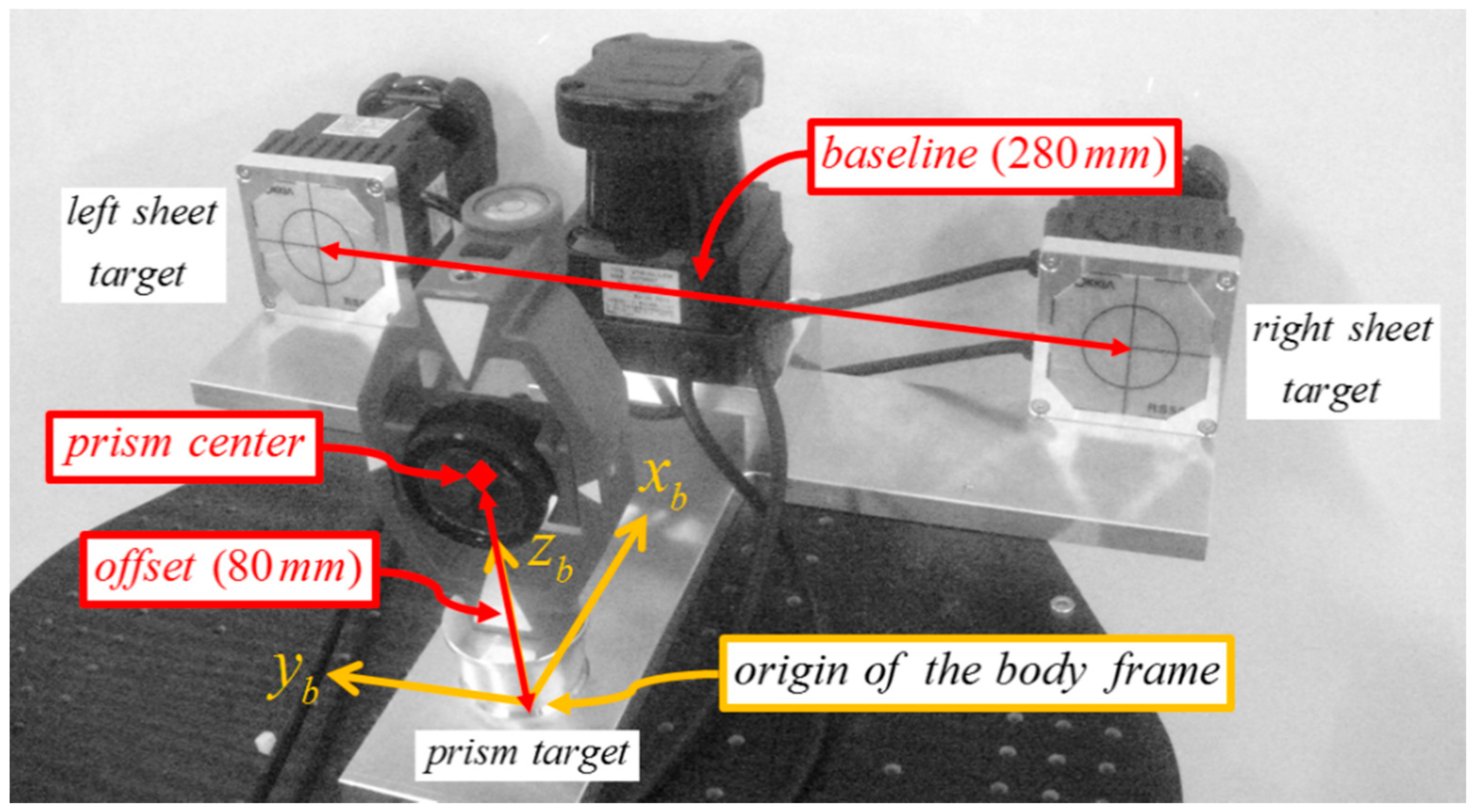
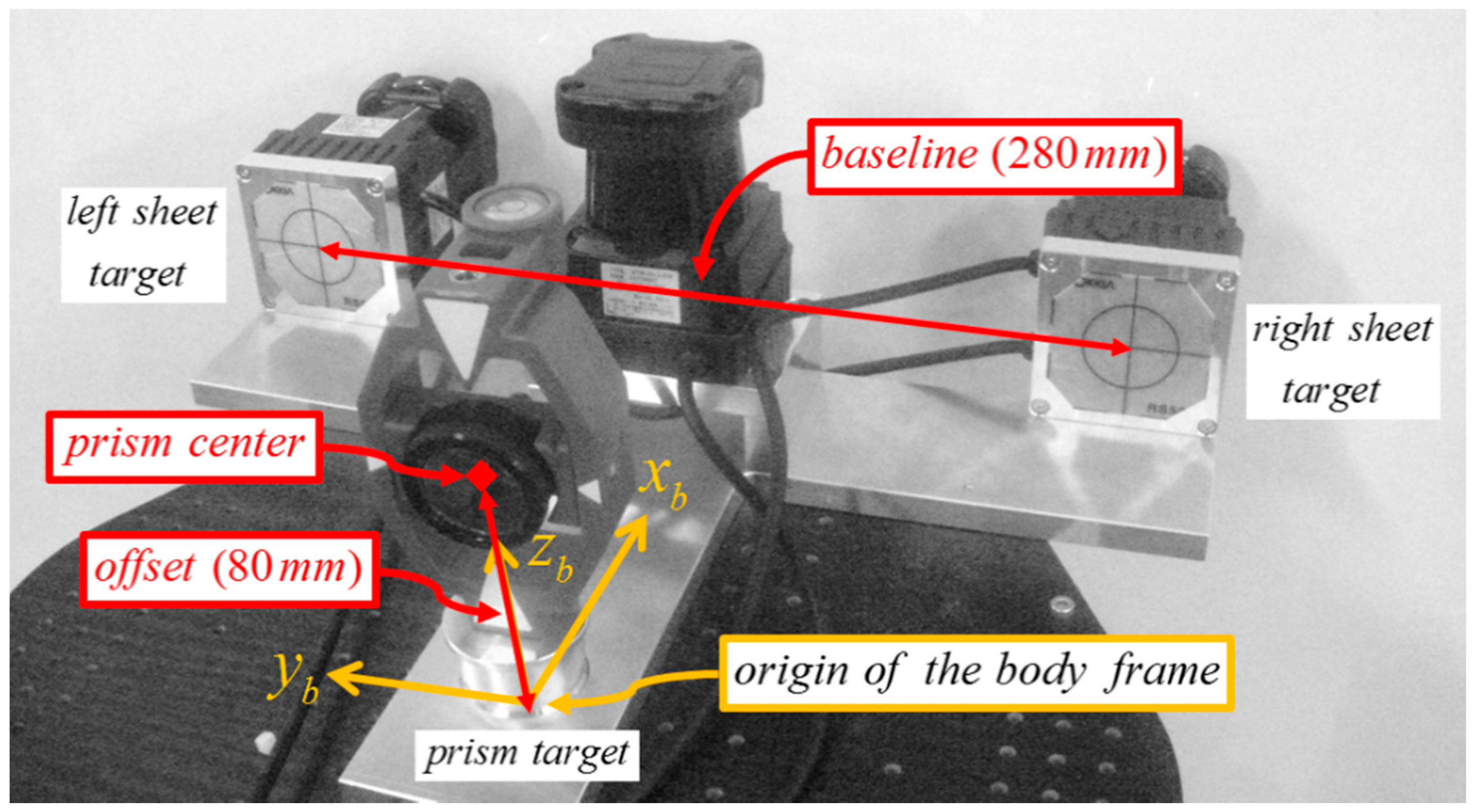
- The body frame (b) of the developed system is right-handed. Its origin is fixed to the center point on the mobile system, and the x-axis points in the direction of the platform’s forward movement. Each sensor is located with respect to the body frame by the lever-arm (three constant translation) and bore-sight (three rotation) parameters given by and . In the present study, three different lever-arm and bore-sight parameter groups are used to define the middle-horizontal, left-vertical, and right-vertical LRF sensors.
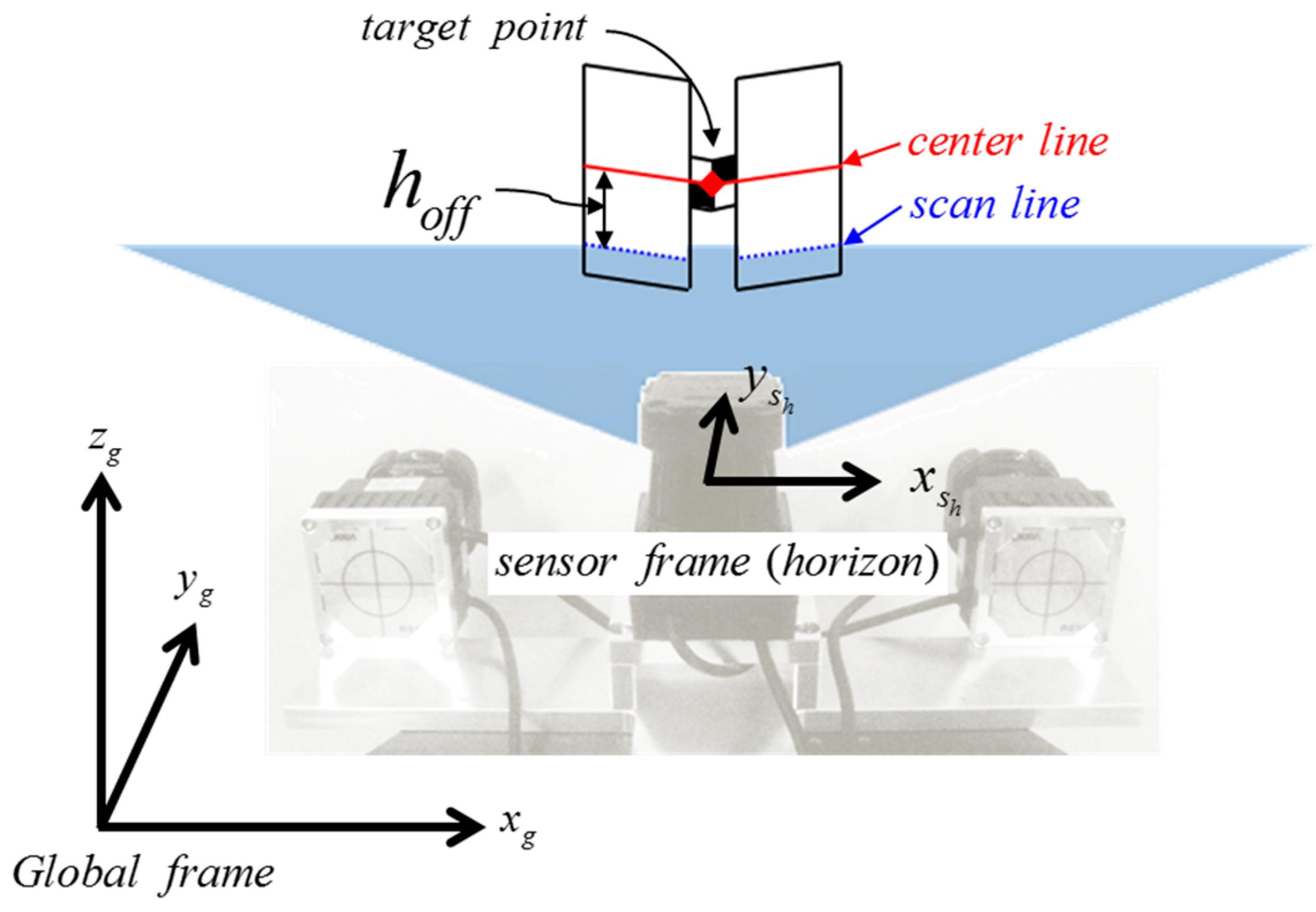
- The global frame (g) is fixed to an arbitrary point on the Earth and is used to represent the stationary environment in which the platform moves. In the present study, the origin of the global frame was fixed to the point from which the platform starts to move. The movement of the system with respect to the global frame is given by the three constant translation parameters and three rotation parameters , respectively. In its practical implementation, however, the movement of the system (X) is limited to the 2D space and thus represented by two translation parameters on the x-y plane and one rotation parameter along the z-axis: .
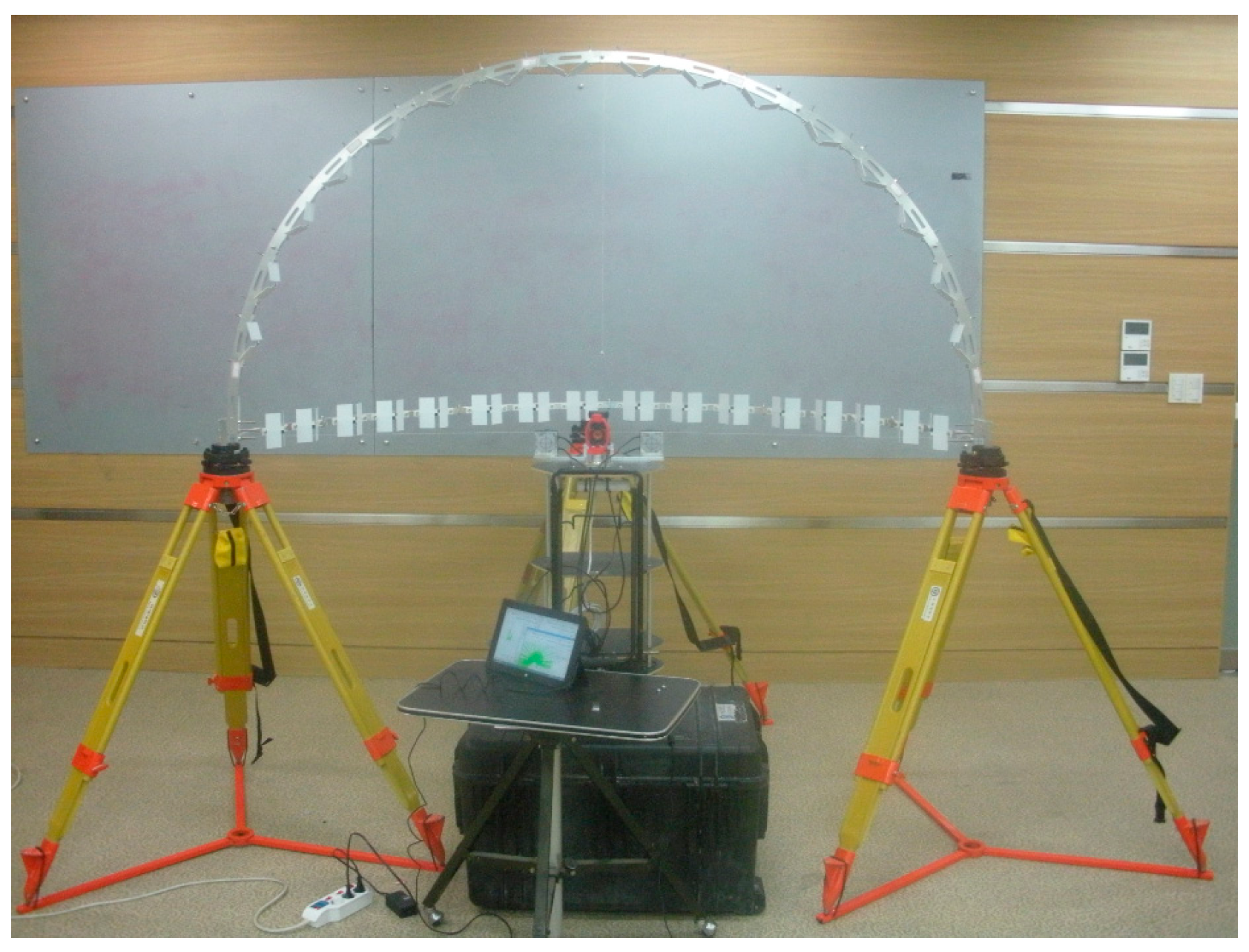
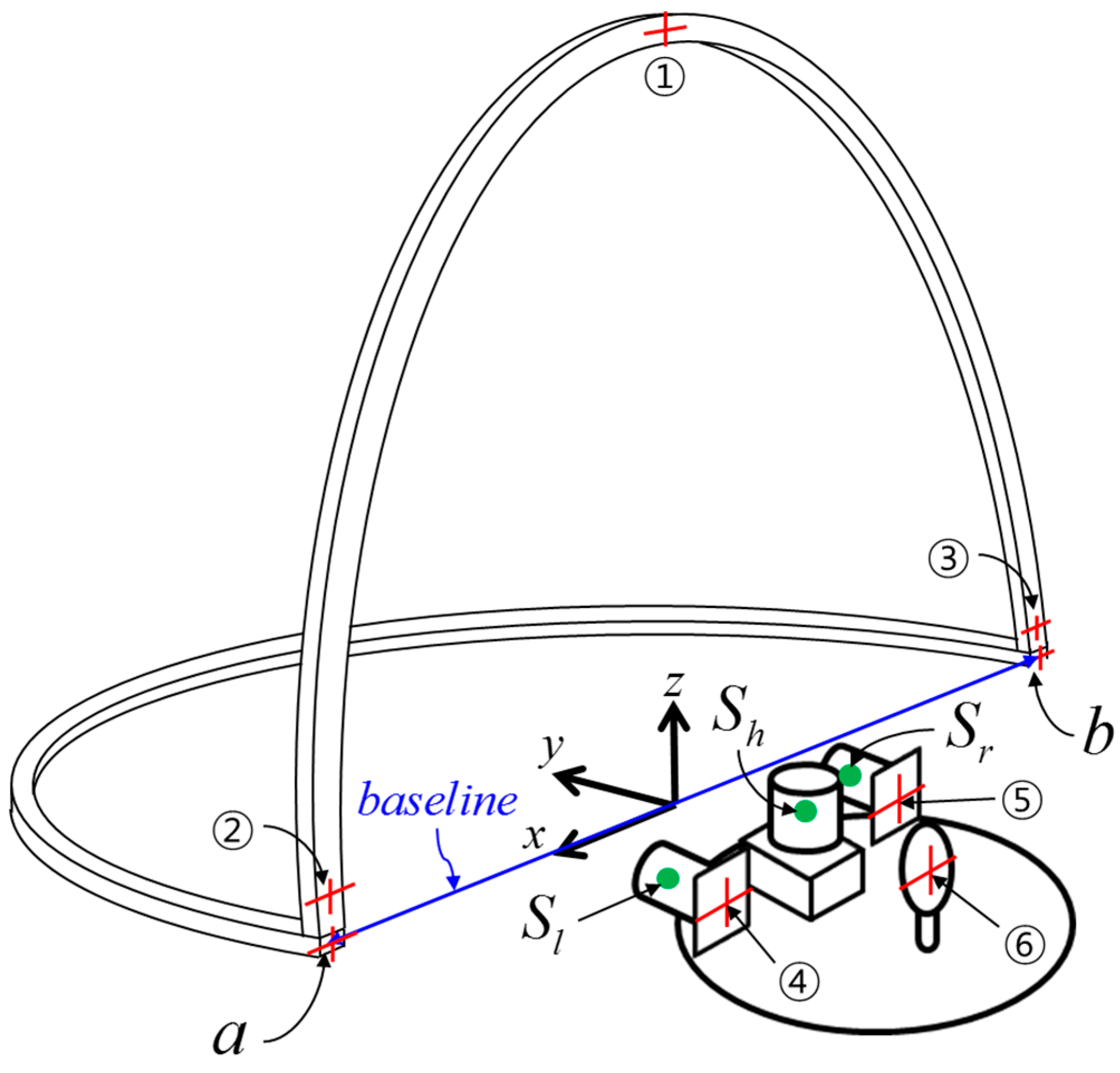
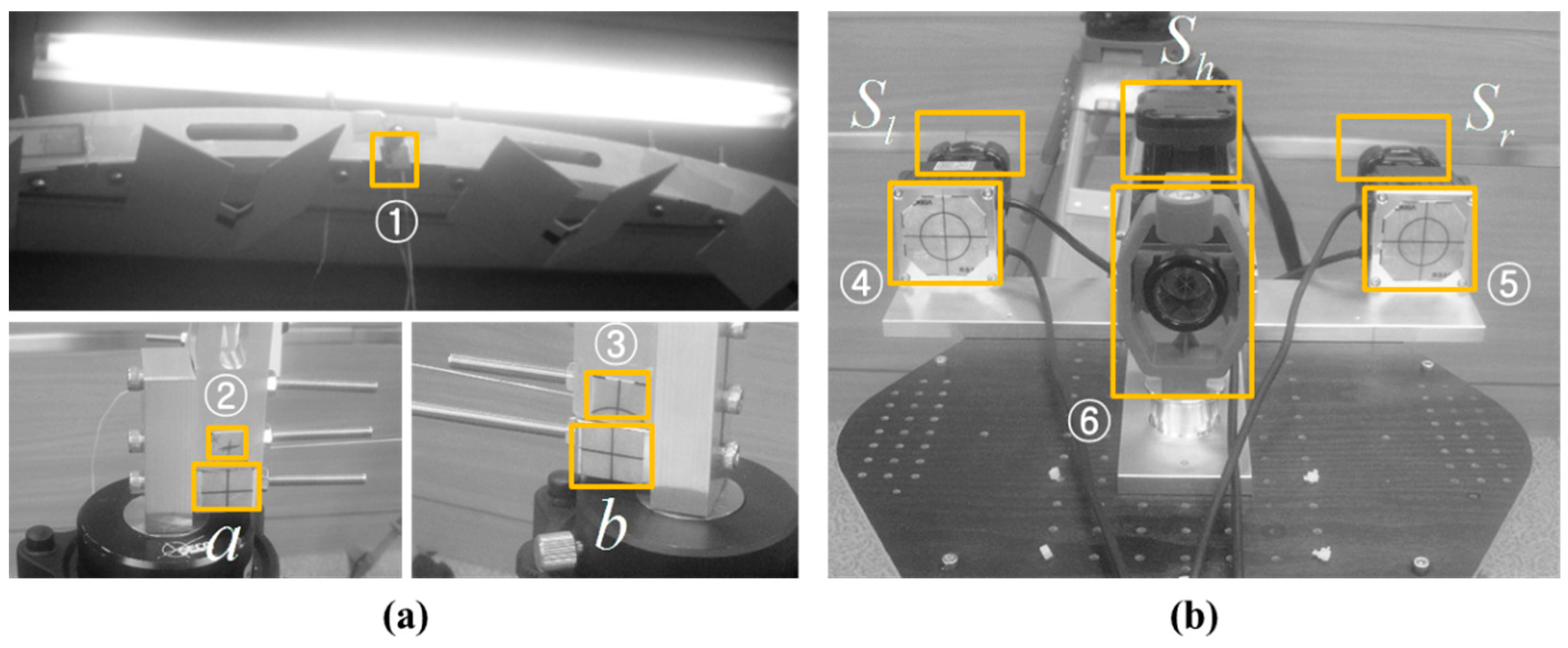
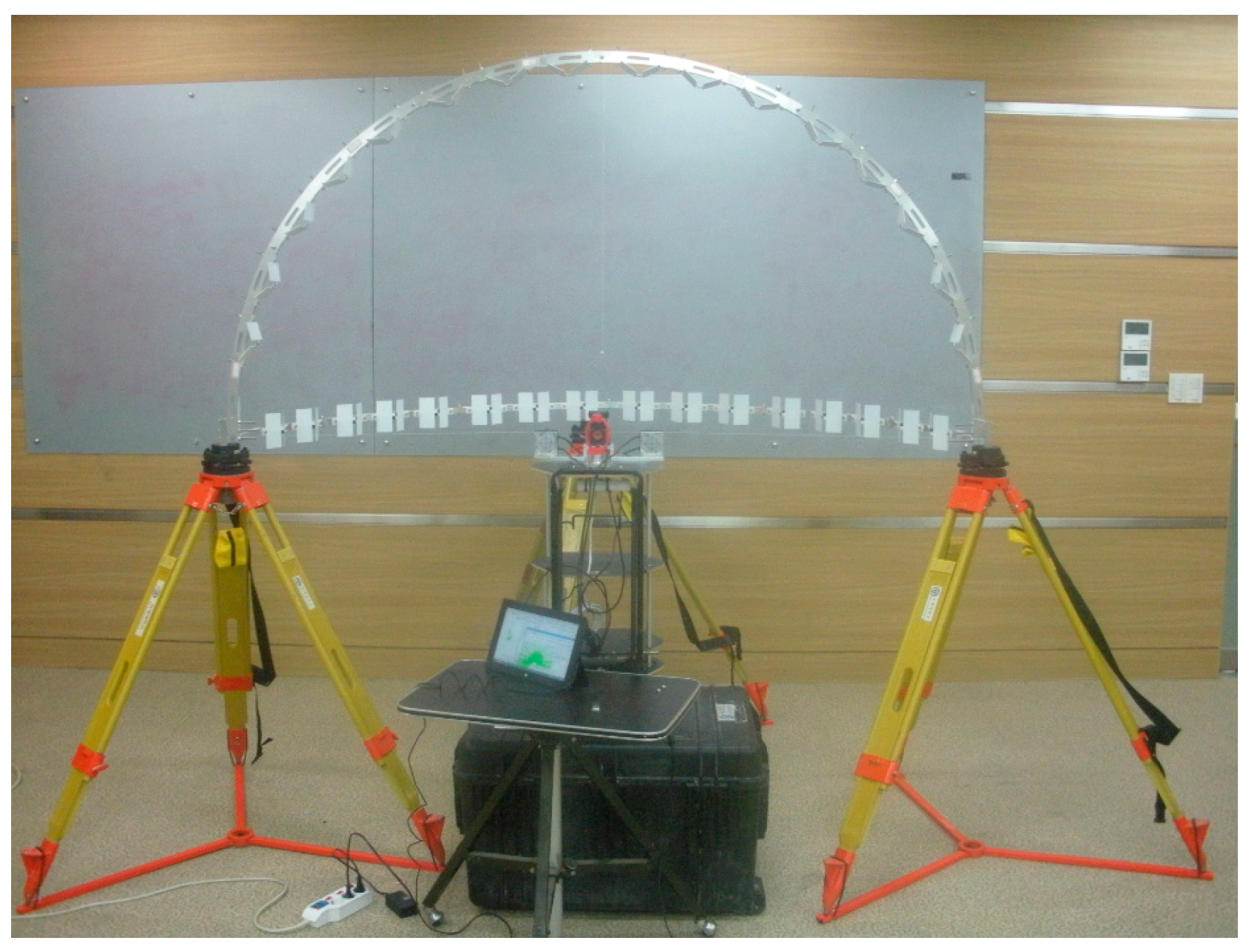
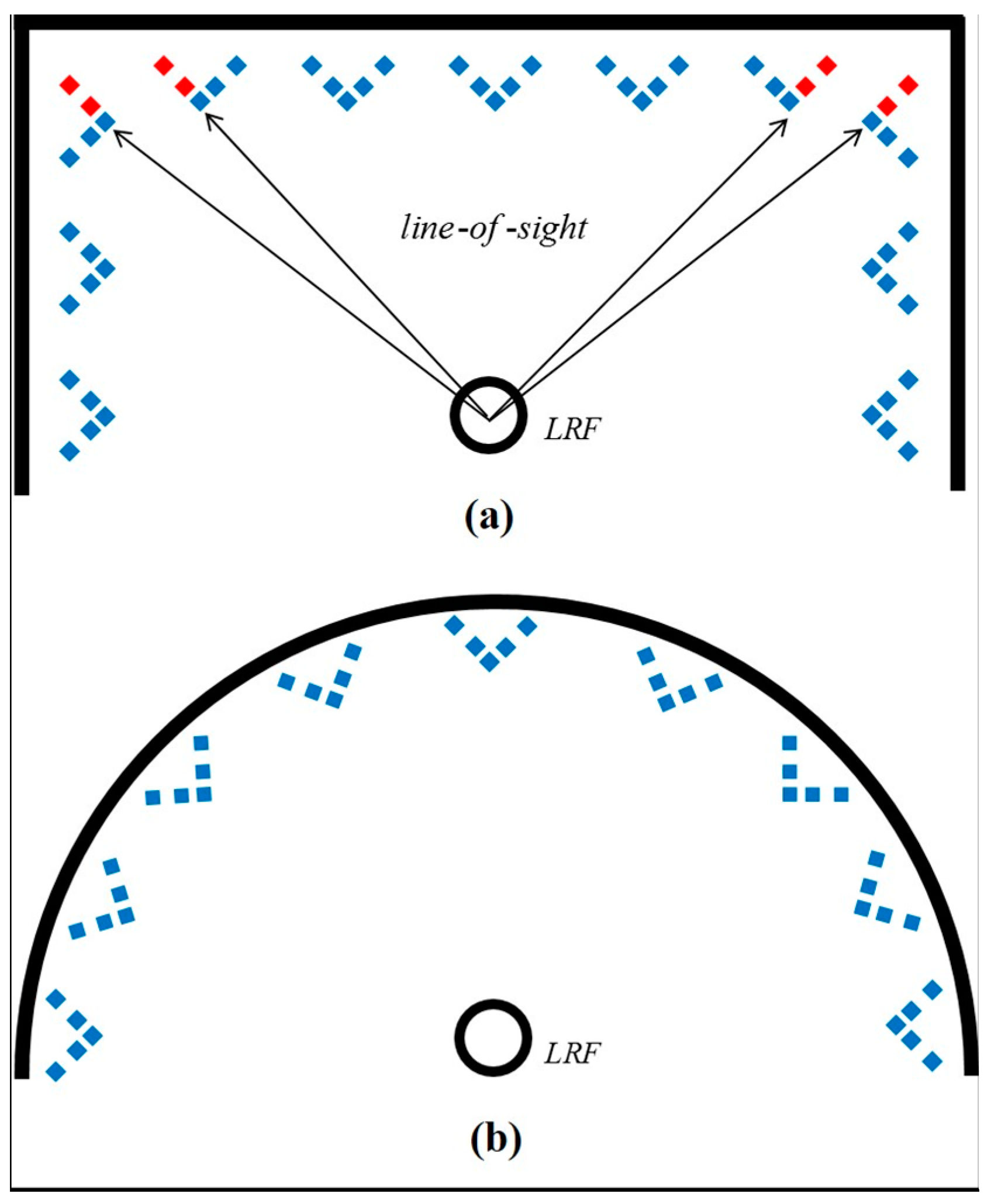
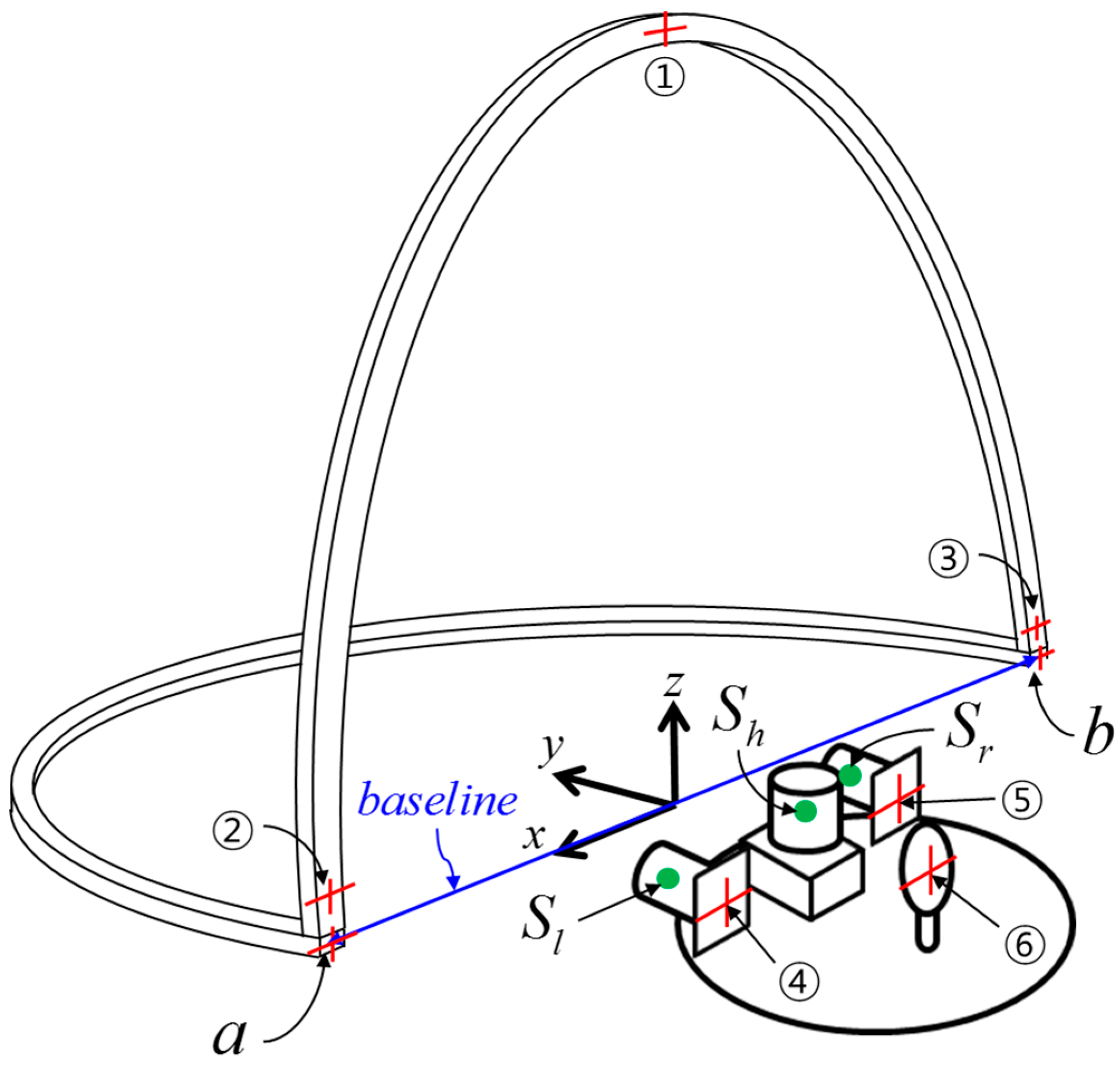
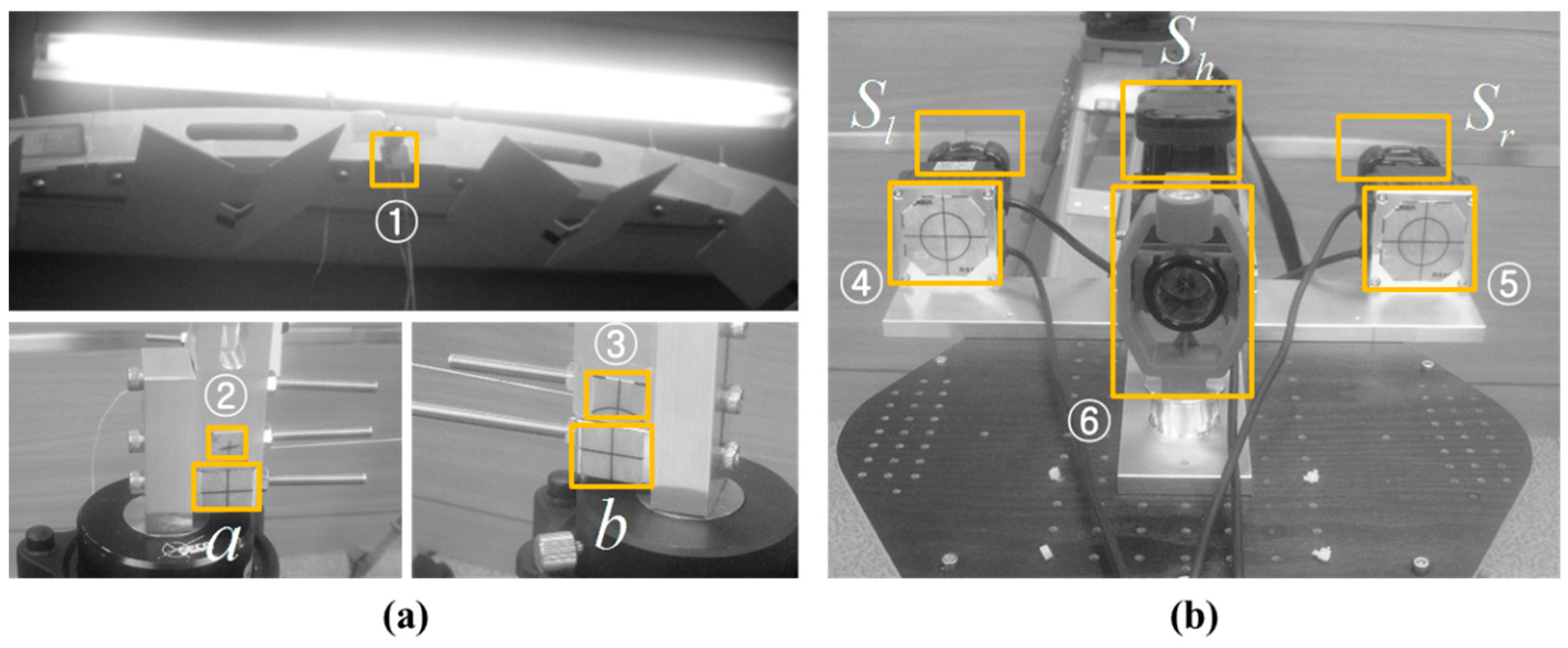
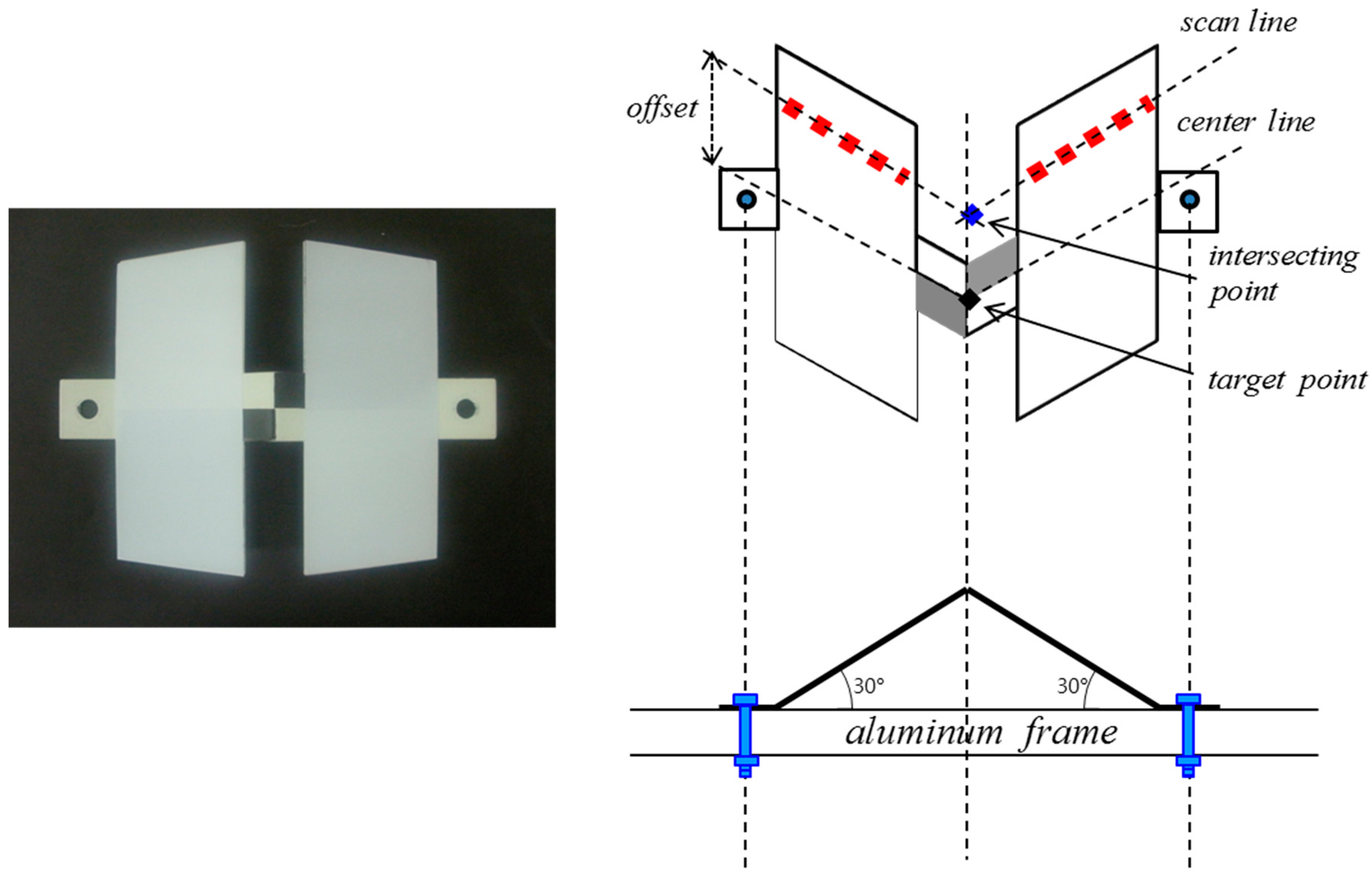
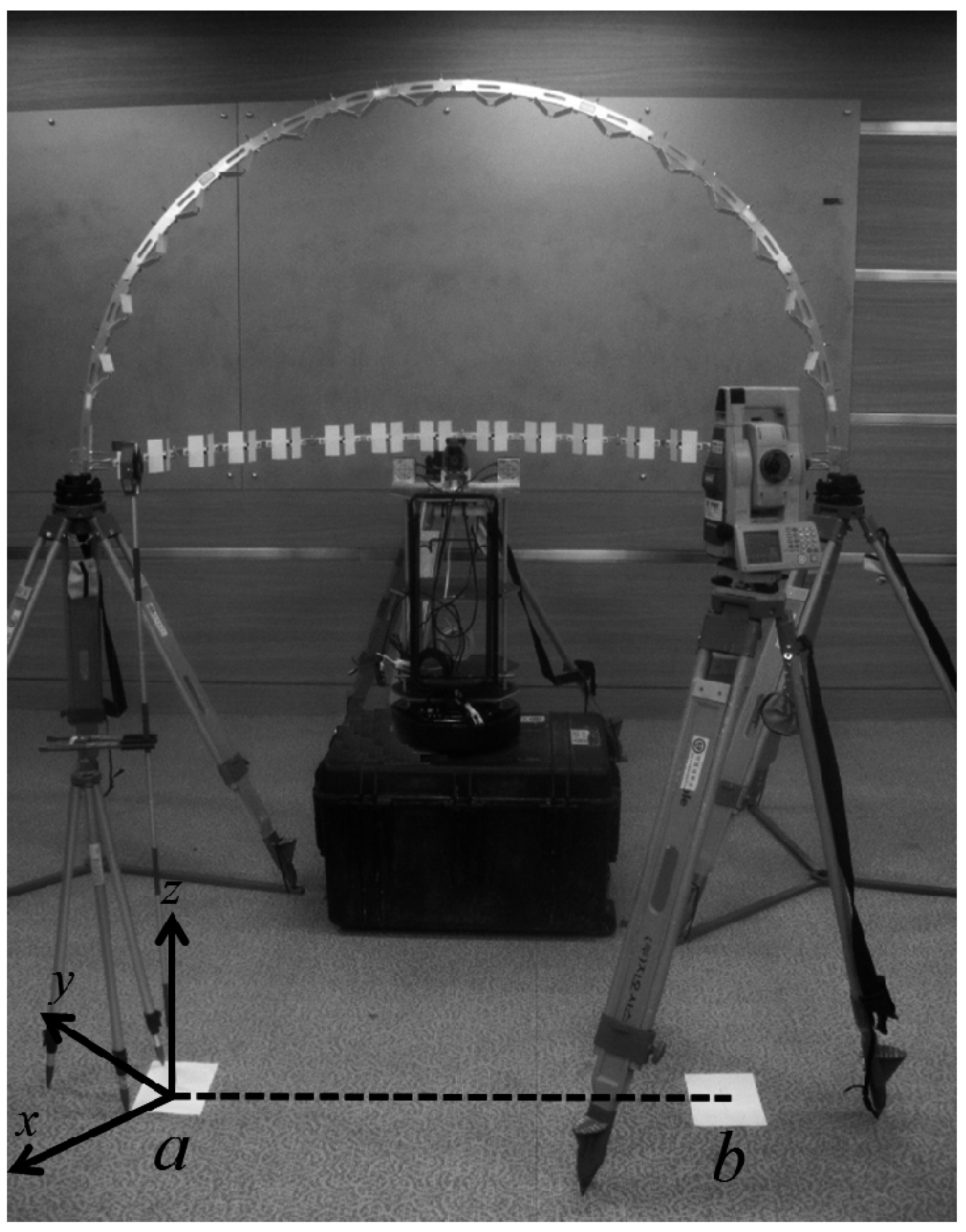
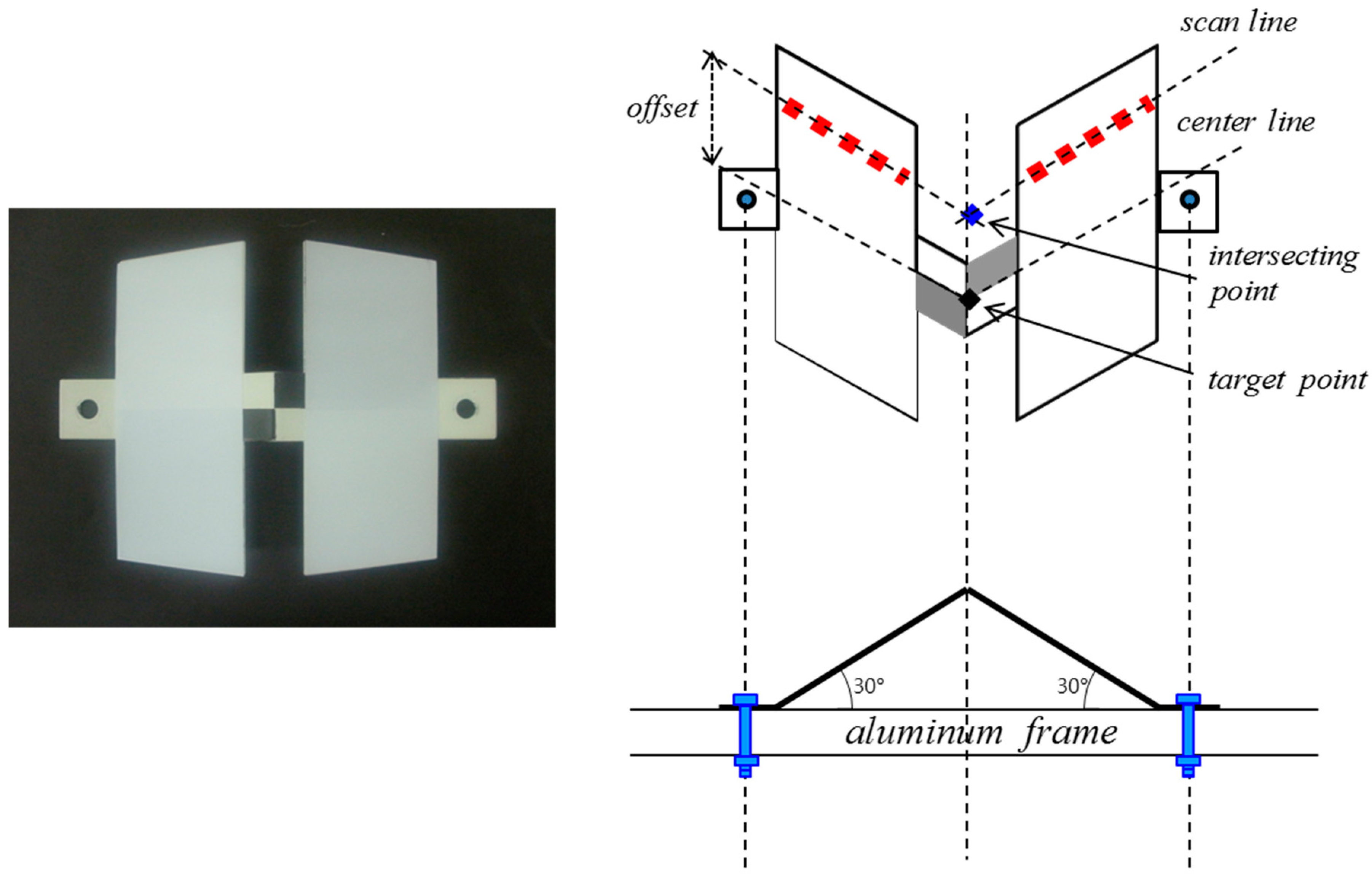
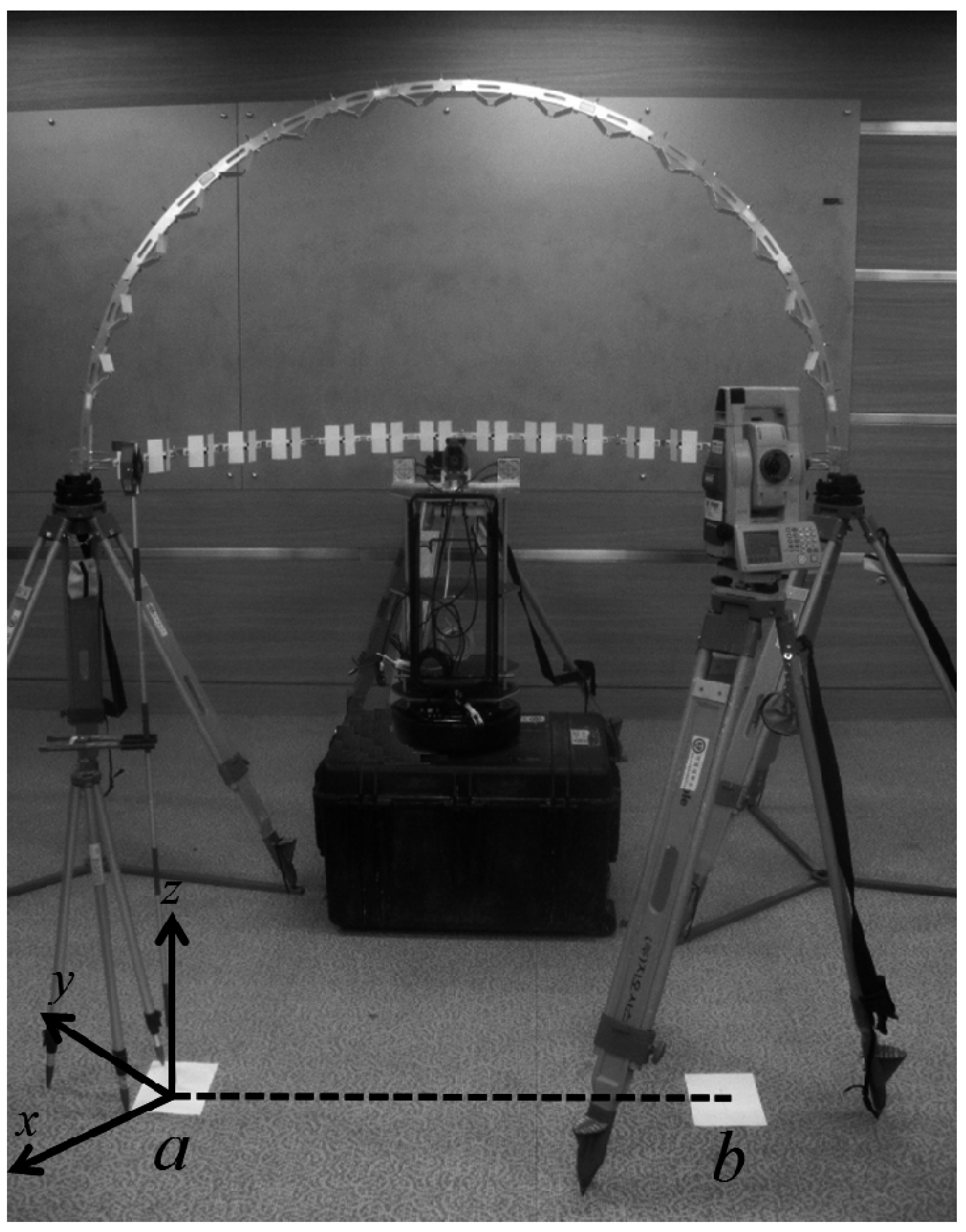
2.3. Calibration Facility
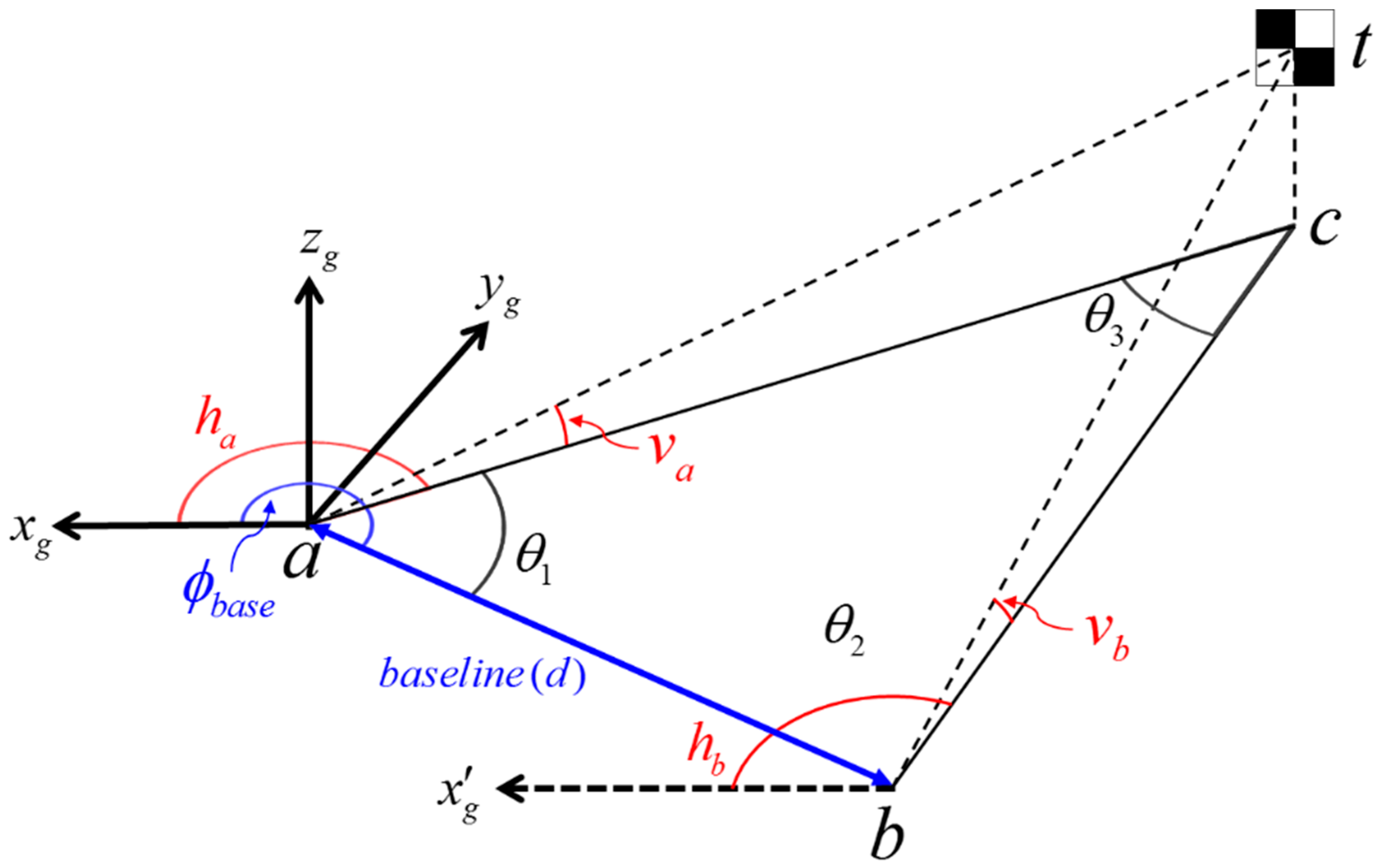
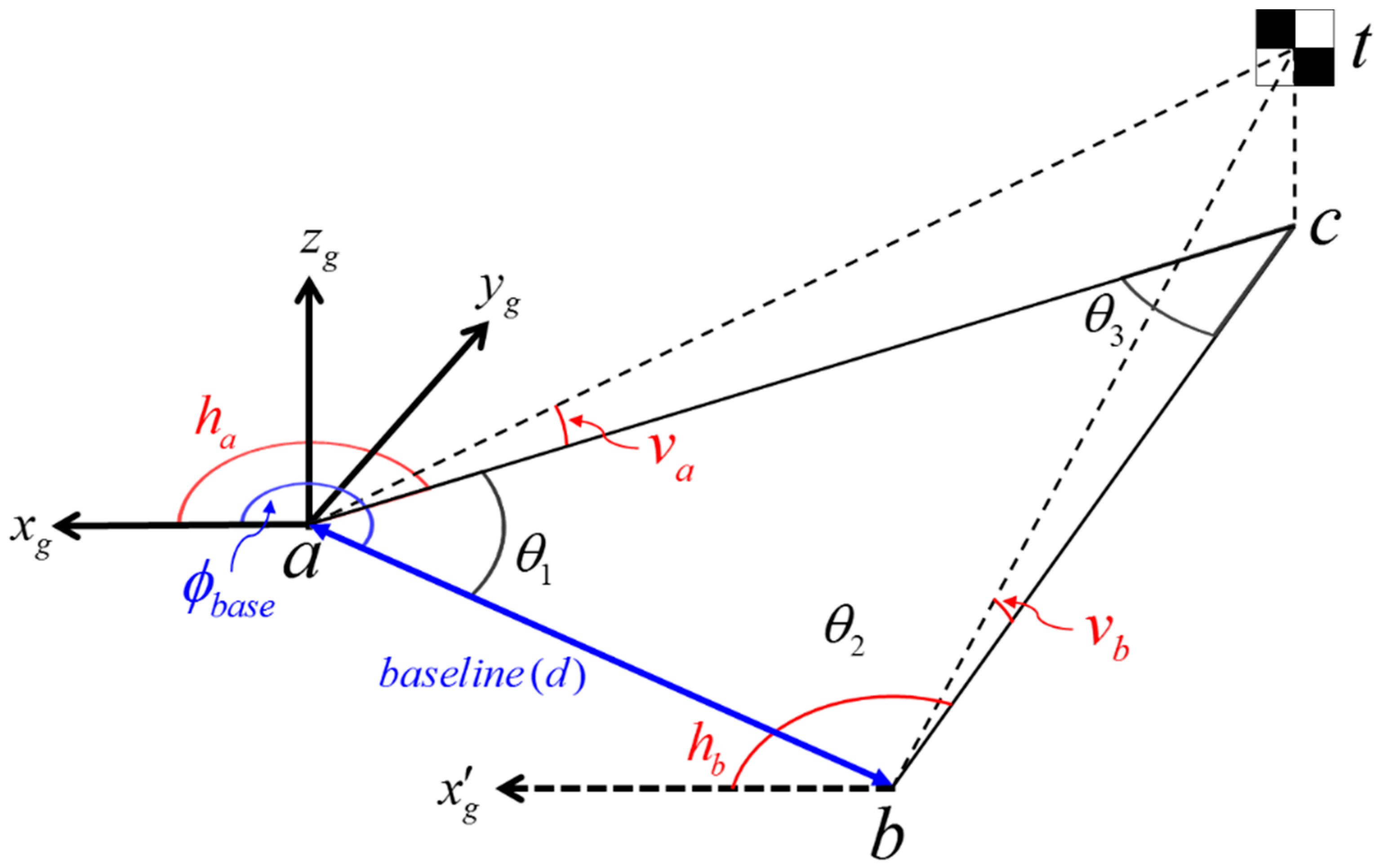
2.4. System Equations
3. Calibration Process
3.1. Calibration Facility Setup

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Point | x | y | z |
|---|---|---|---|
| 1.030 (fixed) | 0.000 (fixed) | 0.000 (fixed) | |
| −1.030 (fixed) | 0.000 (fixed) | 0.000 (fixed) | |
| ① | - | −0.001 | - |
| ② | - | −0.001 | - |
| ③ | - | −0.001 | - |
| ④ | 0.139 | −0.015 | −0.009 |
| ⑤ | −1.141 | −0.015 | −0.008 |
| ⑥ | −0.001 | −0.149 | 0.030 |
| −0.001 | −0.018 | 0.045 | |
| 0.139 | 0.050 | −0.009 | |
| −0.141 | 0.050 | −0.008 | |
| Offset | Value | ||
| 0.045 | |||
| 0.040 | |||
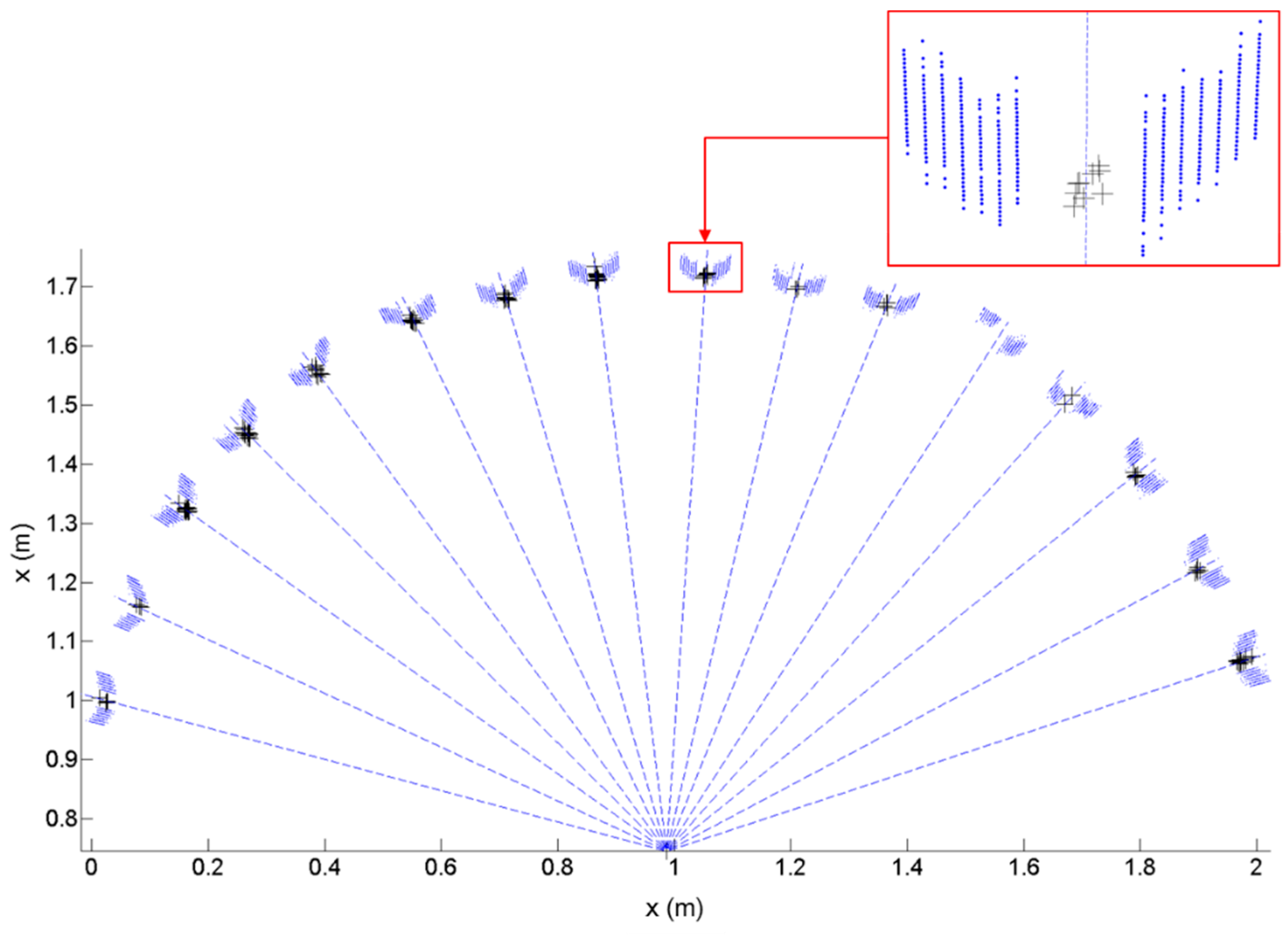
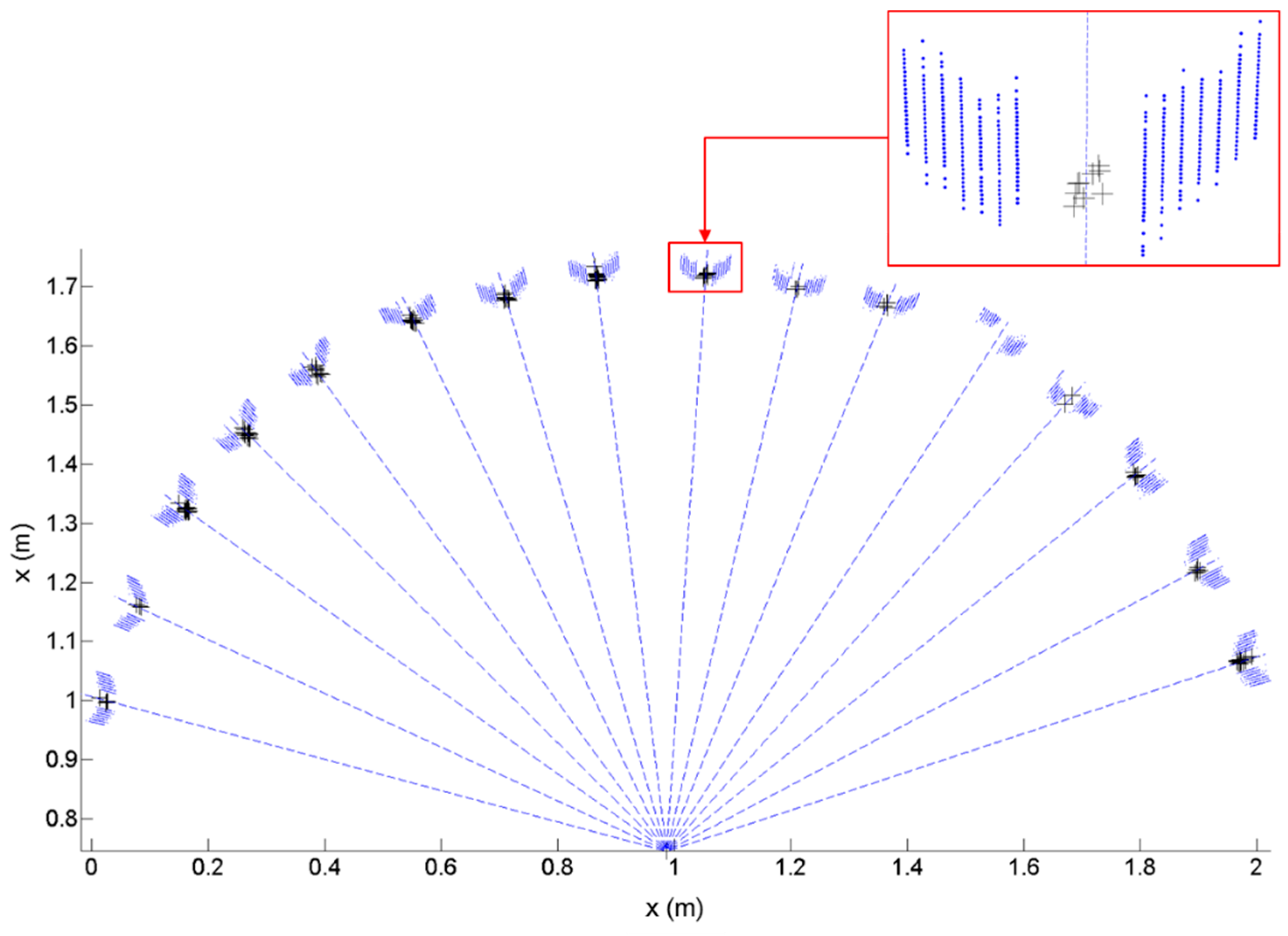
3.2. Determination of Target Coordinates
| Position (m) | Standard Deviation (mm) | |||||
|---|---|---|---|---|---|---|
| No. | x | y | z | x | y | z |
| 1 | 0.348 | 1.432 | 1.188 | 0.102 | 0.367 | 0.116 |
| 2 | 0.472 | 1.541 | 1.189 | 0.069 | 0.236 | 0.076 |
| 3 | 0.630 | 1.634 | 1.187 | 0.070 | 0.218 | 0.074 |
| 4 | 0.781 | 1.688 | 1.188 | 0.099 | 0.279 | 0.097 |
| 5 | 0.939 | 1.715 | 1.189 | 0.067 | 0.167 | 0.060 |
| 6 | 1.125 | 1.715 | 1.190 | 0.091 | 0.202 | 0.074 |
| 7 | 1.283 | 1.688 | 1.194 | 0.193 | 0.379 | 0.141 |
| 8 | 1.434 | 1.635 | 1.197 | 0.161 | 0.284 | 0.108 |
| 9 | 1.596 | 1.543 | 1.197 | 0.068 | 0.106 | 0.042 |
| 10 | 1.722 | 1.445 | 1.195 | 0.154 | 0.215 | 0.088 |
| 11 | 1.829 | 1.326 | 1.195 | 0.180 | 0.227 | 0.096 |
| 12 | 1.930 | 1.168 | 1.194 | 0.133 | 0.149 | 0.066 |
| 13 | 1.992 | 1.020 | 1.193 | 0.115 | 0.118 | 0.054 |
| 14 | 2.030 | 0.866 | 1.193 | 0.246 | 0.230 | 0.108 |
| 15 | 2.037 | 0.680 | 1.192 | 0.226 | 0.192 | 0.094 |
| 16 | 2.015 | 0.516 | 1.191 | 0.220 | 0.172 | 0.087 |
| Position (m) | Standard Deviation (mm) | |||||
|---|---|---|---|---|---|---|
| No. | x | y | z | x | y | z |
| 1 | 0.234 | 1.226 | 1.444 | 0.041 | 0.150 | 0.051 |
| 2 | 0.284 | 1.201 | 1.602 | 0.096 | 0.322 | 0.166 |
| 3 | 0.367 | 1.155 | 1.759 | 0.129 | 0.377 | 0.269 |
| 4 | 0.461 | 1.104 | 1.877 | 0.133 | 0.333 | 0.290 |
| 5 | 0.571 | 1.042 | 1.976 | 0.045 | 0.095 | 0.096 |
| 6 | 0.716 | 0.965 | 2.066 | 0.032 | 0.058 | 0.066 |
| 7 | 0.849 | 0.891 | 2.117 | 0.088 | 0.142 | 0.176 |
| 8 | 0.988 | 0.816 | 2.143 | 0.162 | 0.241 | 0.313 |
| 9 | 1.152 | 0.726 | 2.143 | 0.252 | 0.354 | 0.469 |
| 10 | 1.291 | 0.650 | 2.116 | 0.329 | 0.443 | 0.580 |
| 11 | 1.423 | 0.577 | 2.065 | 0.449 | 0.569 | 0.726 |
| 12 | 1.568 | 0.498 | 1.976 | 0.564 | 0.645 | 0.780 |
| 13 | 1.679 | 0.437 | 1.877 | 0.575 | 0.590 | 0.663 |
| 14 | 1.773 | 0.386 | 1.759 | 0.489 | 0.448 | 0.446 |
| 15 | 1.857 | 0.340 | 1.603 | 0.643 | 0.524 | 0.411 |
| 16 | 1.906 | 0.311 | 1.446 | 0.165 | 0.124 | 0.069 |
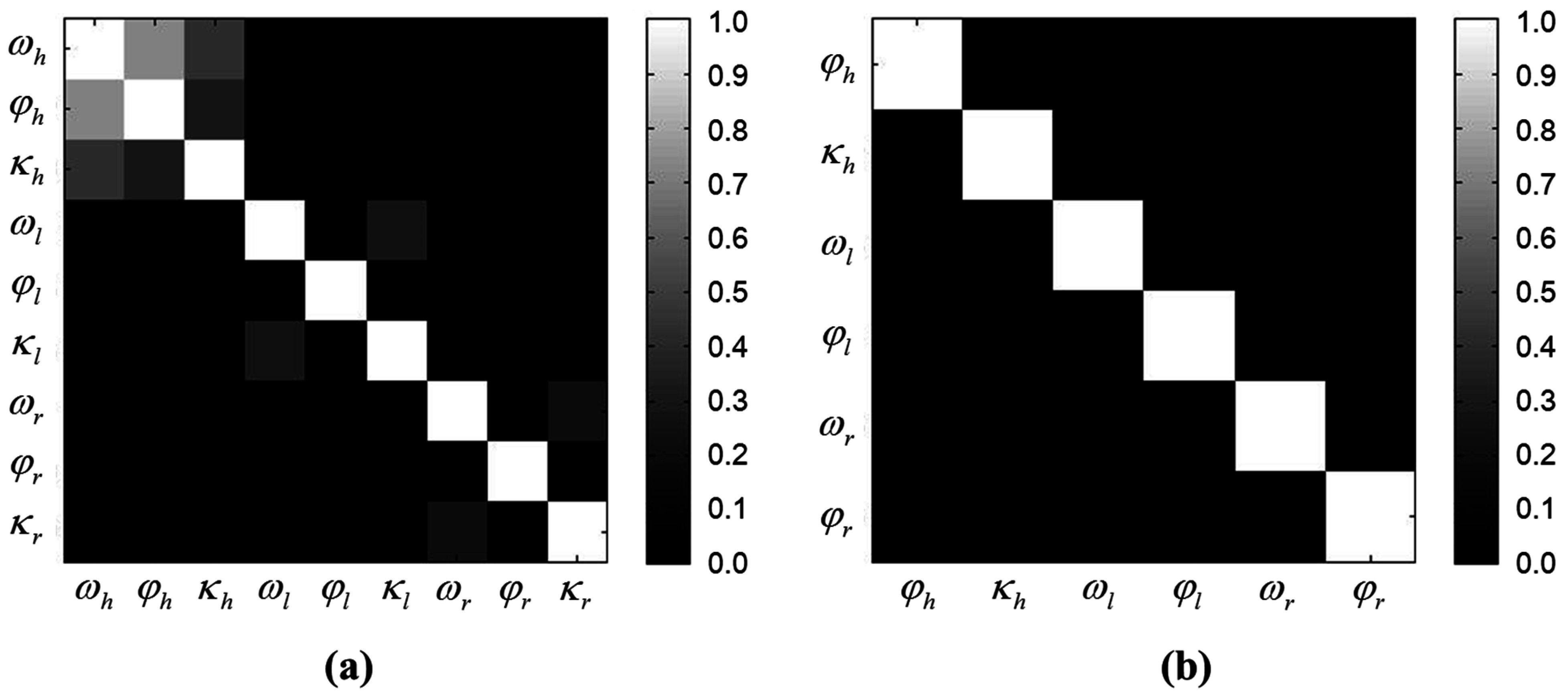
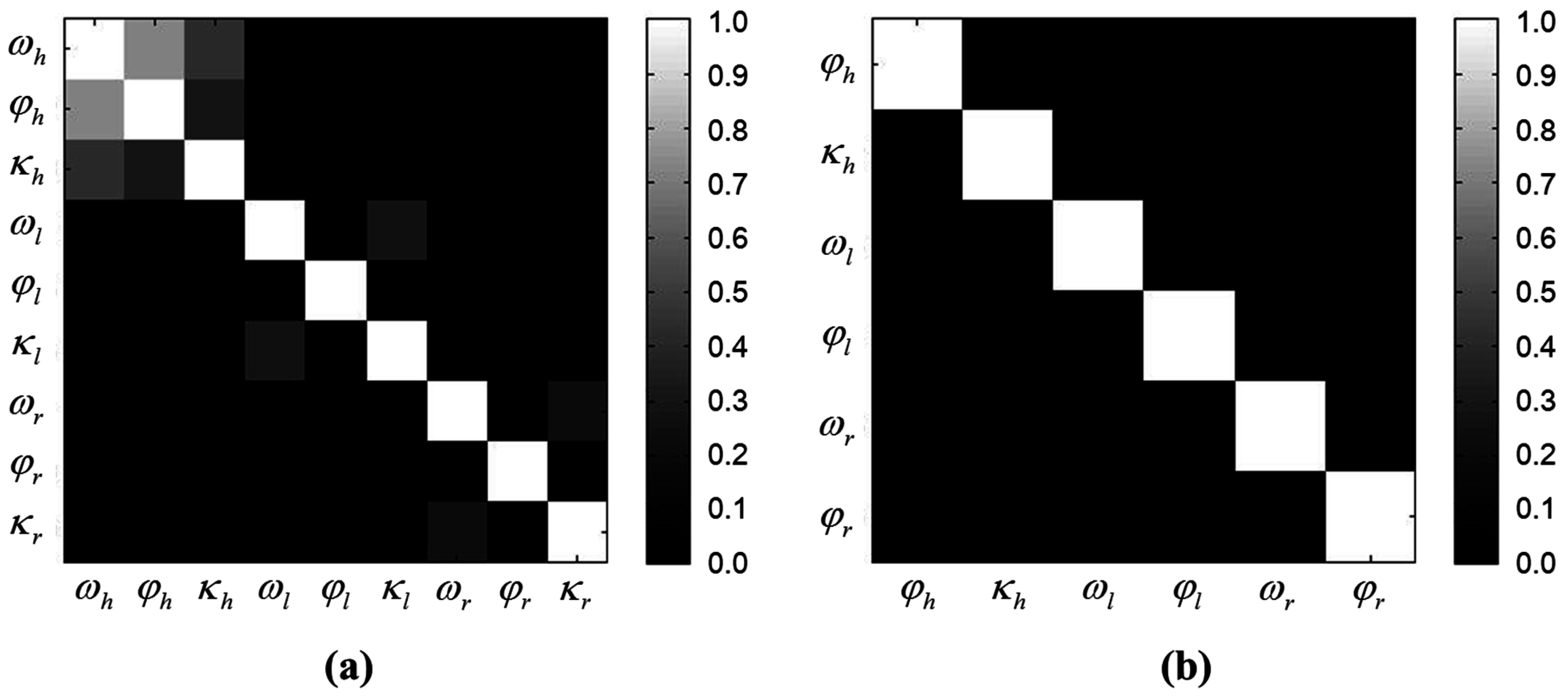
4. Experimental Results
| Calibration Parameters | Initial Approximation | Calibration without Constraints | Calibration with Constraints |
|---|---|---|---|
| 0.000 | −144.902 | 0.000 | |
| 0.000 | −0.100 | −0.148 | |
| −90.000 | −90.625 | −90.274 | |
| 0.000 | −1.018 | −1.018 | |
| 90.000 | 90.004 | 90.004 | |
| 0.000 | −0.001 | 0.000 | |
| 0.000 | −1.194 | −1.017 | |
| 90.000 | 89.969 | 89.965 | |
| −180.000 | −179.180 | −180.000 | |
| Convergence | - | No | Yes |
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bosché, F.; Guenet, E. Automating surface flatness control using terrestrial laser scanning and building information models. Autom. Constr. 2014, 44, 212–226. [Google Scholar] [CrossRef]
- Jung, J.; Hong, S.; Jeong, S.; Kim, S.; Cho, H.; Hong, S.; Heo, J. Productive modeling for development of as-built bim of existing indoor structures. Autom. Constr. 2014, 42, 68–77. [Google Scholar] [CrossRef]
- Heo, J.; Jeong, S.; Park, H.-K.; Jung, J.; Han, S.; Hong, S.; Sohn, H.-G. Productive high-complexity 3d city modeling with point clouds collected from terrestrial lidar. Comput. Environ. Urban Syst. 2013, 41, 26–38. [Google Scholar] [CrossRef]
- Son, H.; Kim, C.; Kim, C. 3d reconstruction of as-built industrial instrumentation models from laser-scan data and a 3d CAD database based on prior knowledge. Autom. Constr. 2015, 49, 193–200. [Google Scholar] [CrossRef]
- Hong, S.; Jung, J.; Kim, S.; Cho, H.; Lee, J.; Heo, J. Semi-automated approach to indoor mapping for 3d as-built building information modeling. Comput. Environ. Urban Syst. 2015, 51, 34–46. [Google Scholar] [CrossRef]
- Han, S.; Cho, H.; Kim, S.; Jung, J.; Heo, J. Automated and efficient method for extraction of tunnel cross sections using terrestrial laser scanned data. J. Comput. Civil Eng. 2012, 27, 274–281. [Google Scholar] [CrossRef]
- Yang, B.; Zang, Y. Automated registration of dense terrestrial laser-scanning point clouds using curves. ISPRS J. Photogramm. Remote Sens. 2014, 95, 109–121. [Google Scholar] [CrossRef]
- Yan, R.J.; Wu, J.; Lee, J.Y.; Han, C.S. 3d point cloud map construction based on line segments with two mutually perpendicular laser sensors. In Proceedings of the International Conference on Control, Automation and Systems (ICCAS), Kimdaejung Convention Center, Gwangju, Korea, 20–23 October 2013; pp. 1114–1116.
- Wang, Y.K.; Huo, J.; Wang, X.S. A real-time robotic indoor 3d mapping system using duel 2d laser range finders. In Proceedings of the Chinese Control Conference (CCC), Nanjing, China, 28–30 July 2014; pp. 8542–8546.
- Underwood, J.P.; Hill, A.; Peynot, T.; Scheding, S.J. Error modeling and calibration of exteroceptive sensors for accurate mapping applications. J. Field Robot. 2010, 27, 2–20. [Google Scholar] [CrossRef]
- Abbas, M.A.; Setan, H.; Majid, Z.; Chong, A.K.; Idris, K.M.; Aspuri, A. Calibration and accuracy assessment of leica scanstation c10 terrestrial laser scanner. In Developments in Multidimensional Spatial Data Models; Springer: Berlin, Germany, 2013; pp. 33–47. [Google Scholar]
- Reshetyuk, Y. Self-Calibration and Direct Georeferencing in Terrestrial Laser Scanning. Infrastructure, Geodesy. Ph.D. Thesis, Royal Institute of Technology (KTH), Stockholm, Sweden, 2009. [Google Scholar]
- Zhang, Q.; Pless, R. Extrinsic calibration of a camera and laser range finder (improves camera calibration). In Proceedings of the International Conference on Intelligent Robots and Systems (IROS), Sendai, Japan, 28 September–2 October 2004; Volume 3, pp. 2301–2306.
- Weingarten, J. Feature-Based 3d Slam; Swiss Federal Institute of Technology Lausanne: Vaud, Switzerland, 2006. [Google Scholar]
- Li, G.; Liu, Y.; Dong, L.; Cai, X.; Zhou, D. An algorithm for extrinsic parameters calibration of a camera and a laser range finder using line features. In Proceedings of the International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 3854–3859.
- Scaramuzza, D.; Harati, A.; Siegwart, R. Extrinsic self calibration of a camera and a 3d laser range finder from natural scenes. In Proceedings of the International Conference on Intelligent Robots and Systems (IROS), San Diego, CA, USA, 29 October–2 November 2007; pp. 4164–4169.
- Vasconcelos, F.; Barreto, J.P.; Nunes, U. A minimal solution for the extrinsic calibration of a camera and a laser-rangefinder. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2097–2107. [Google Scholar] [CrossRef] [PubMed]
- Zhou, L. A new minimal solution for the extrinsic calibration of a 2d lidar and a camera using three plane-line correspondences. IEEE Sens. J. 2014, 14, 442–454. [Google Scholar] [CrossRef]
- Choi, D.G.; Bok, Y.; Kim, J.S.; Kweon, I.S. Extrinsic calibration of 2d laser sensors. In Proceedings of the International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 3027–3033.
- Antone, M.E.; Friedman, Y. Fully automated laser range calibration. In Proceedings of the British Machine Vision Conference (BMVC), University of Warwick, Coventry, UK, 10–13 September 2007; pp. 1–10.
- Hokuyo Automatic Co. LTD. Scanning Laser Range Finder utm-30lx/ln Specification; Hokuyo Automatic Co. LTD: Osaka, Japan, 2009. [Google Scholar]
- Demski, P.; Mikulski, M.; Koteras, R. Characterization of hokuyo utm-30lx laser range finder for an autonomous mobile robot. Adv. Technol. Intell. Syst. 2013, 440, 143–153. [Google Scholar]
- Chan, T.O.; Lichti, D.D.; Glennie, C.L. Multi-feature based boresight self-calibration of a terrestrial mobile mapping system. ISPRS J. Photogramm. Remote Sens. 2013, 82, 112–124. [Google Scholar] [CrossRef]
- Maddern, W.; Harrison, A.; Newman, P. Lost in translation (and rotation): Rapid extrinsic calibration for 2d and 3d lidars. In Proceedings of the International Conference on Robotics and Automation (ICRA), RiverCentre, Saint Paul, MN, USA, 14–18 May 2012; pp. 3096–3102.
- Vallet, J.; Skaloud, J. Development and experiences with a fully-digital handheld mapping system operated from a helicopter. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. Istanb. 2004, 35, 791–796. [Google Scholar]
- Bender, D.; Schikora, M.; Sturm, J.; Cremers, D. A graph based bundle adjustment for ins-camera calibration. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, XL-1/W2, 39–44. [Google Scholar]
- Skaloud, J.; Lichti, D. Rigorous approach to bore-sight self-calibration in airborne laser scanning. ISPRS J. Photogramm. Remote Sens. 2006, 61, 47–59. [Google Scholar] [CrossRef]
- Chan, T.O. Feature-Based Boresight Self-Calibration of a Mobile Mapping System. Master Thesis, University of Calgary, Calgary, AB, Canada, 2011. [Google Scholar]
- Lichti, D.D. Error modelling, calibration and analysis of an am-cw terrestrial laser scanner system. ISPRS J. Photogramm. Remote Sens. 2007, 61, 307–324. [Google Scholar] [CrossRef]
- Wolf, P.R.; Ghilani, C.D. Adjustment Computations: Statistics and Least Squares in Surveying and Gis; John Wiley & Sons: New York, NY, USA, 1997. [Google Scholar]
- Chow, J.C.; Lichti, D.D.; Glennie, C.; Hartzell, P. Improvements to and comparison of static terrestrial lidar self-calibration methods. Sensors 2013, 13, 7224–7249. [Google Scholar] [CrossRef] [PubMed]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jung, J.; Kim, J.; Yoon, S.; Kim, S.; Cho, H.; Kim, C.; Heo, J. Bore-Sight Calibration of Multiple Laser Range Finders for Kinematic 3D Laser Scanning Systems. Sensors 2015, 15, 10292-10314. https://doi.org/10.3390/s150510292
Jung J, Kim J, Yoon S, Kim S, Cho H, Kim C, Heo J. Bore-Sight Calibration of Multiple Laser Range Finders for Kinematic 3D Laser Scanning Systems. Sensors. 2015; 15(5):10292-10314. https://doi.org/10.3390/s150510292
Chicago/Turabian StyleJung, Jaehoon, Jeonghyun Kim, Sanghyun Yoon, Sangmin Kim, Hyoungsig Cho, Changjae Kim, and Joon Heo. 2015. "Bore-Sight Calibration of Multiple Laser Range Finders for Kinematic 3D Laser Scanning Systems" Sensors 15, no. 5: 10292-10314. https://doi.org/10.3390/s150510292