
EEMD Independent Extraction for Mixing Features of Rotating Machinery Reconstructed in Phase Space

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Basic Conception
2.1. Ensemble Empirical Mode Decomposition (EEMD)
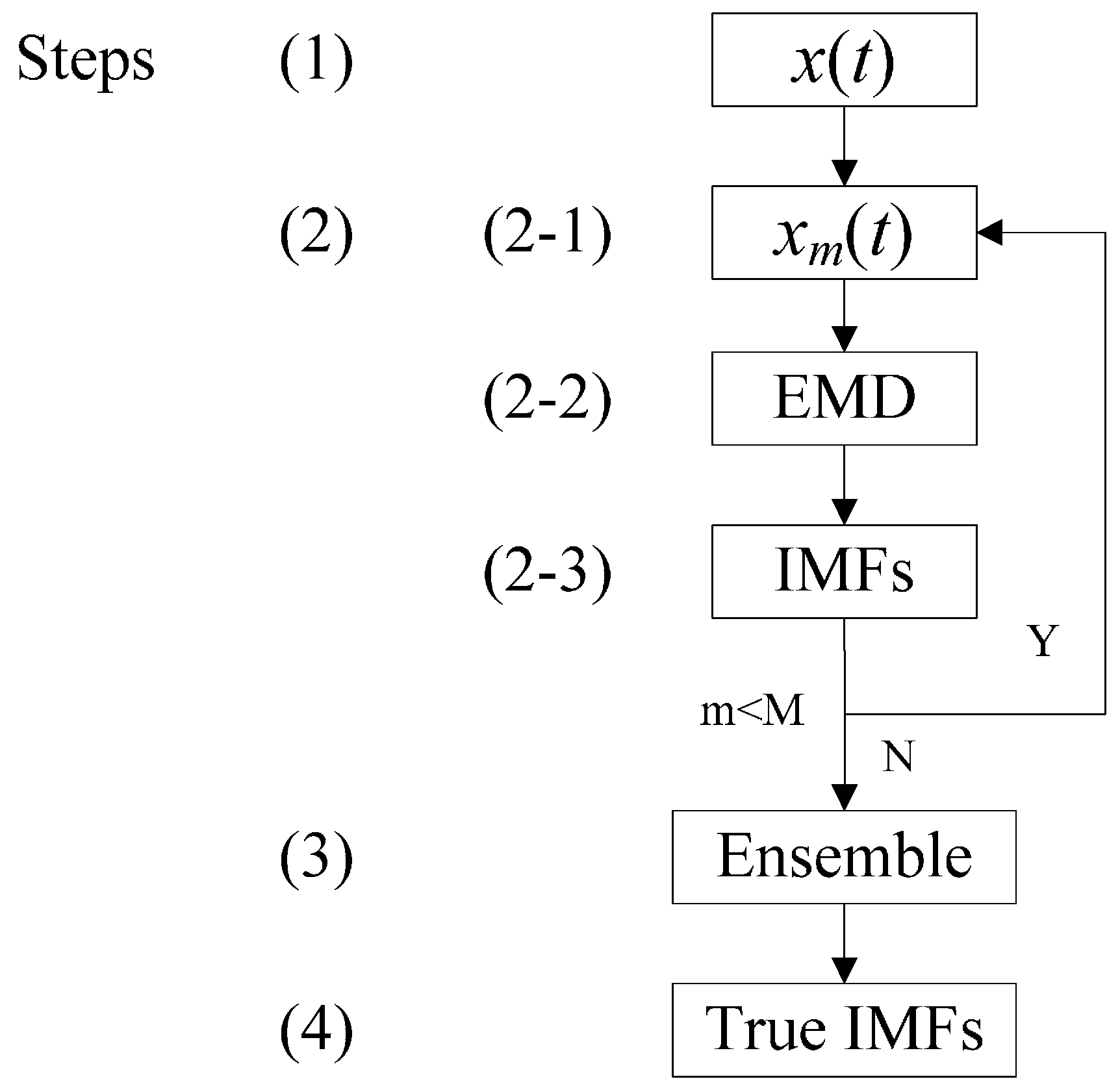
- (1)
- Initialize the ensemble number M, the statistical property of added white noise, and m = 1.
- (2)
- Perform trails M times in a cycle.
- (2-1)
- Add the mth white noise with the given statistical property to the signal,where nm(t) represents the mth added white noise, and xm(t) represents the noise-added signal of the mth trial.
- (2-2)
- Decompose the noise-added signal xm(t) into IMFs ci,m (i = 1,2,…,I) and a residual series rm by EMD:where ci,m denotes the ith IMF of the mth trial, I is the number of IMFs, and rm represents the only residual volume.
- (2-3)
- If m < M, the flow performs back to (2-1), accompanying m = m + 1. Then, perform circulation from (2-1) to (2-3) until m = M.
- (3)
- Calculate the ensemble mean ci of the M trials for each IMF and the residual r using the following equation.
- (4)
- Output all of the true IMFs which should satisfy the formula:
2.2. PSR Based on Hankel Matrix
2.3. Manifold Learning Based on Principle Component Analysis (PCA)
3. Independent Extraction for Mixing Features Based on PSEEMD
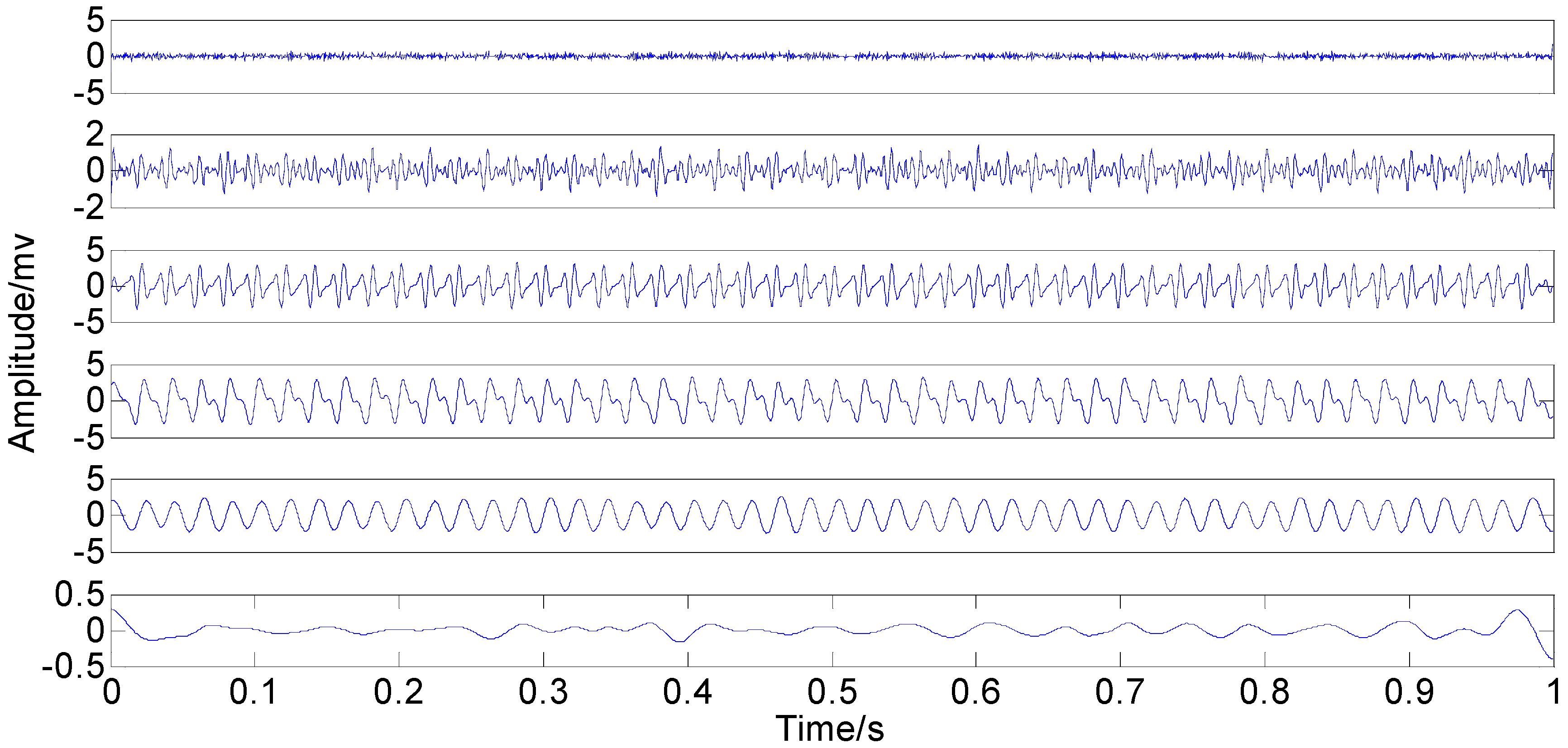
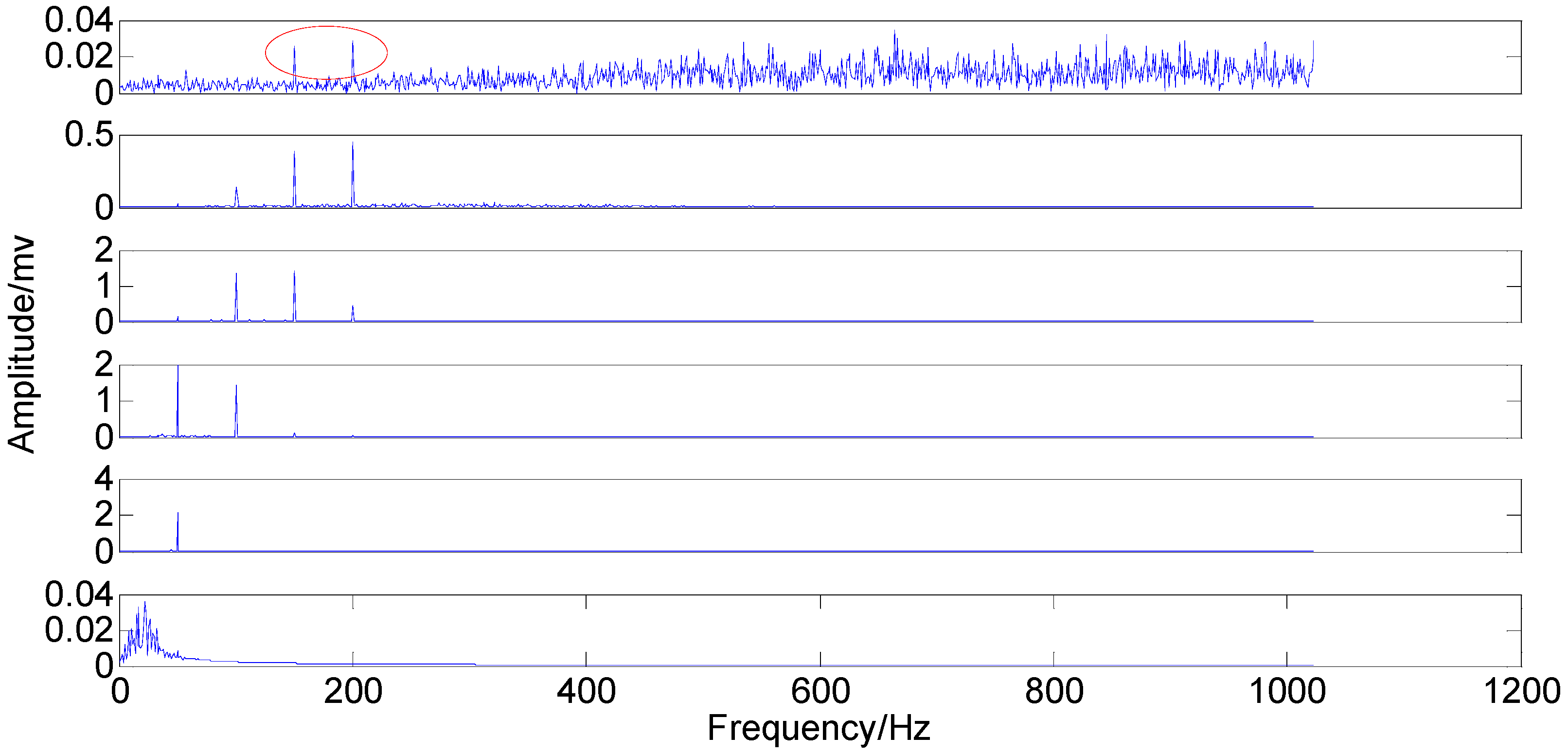
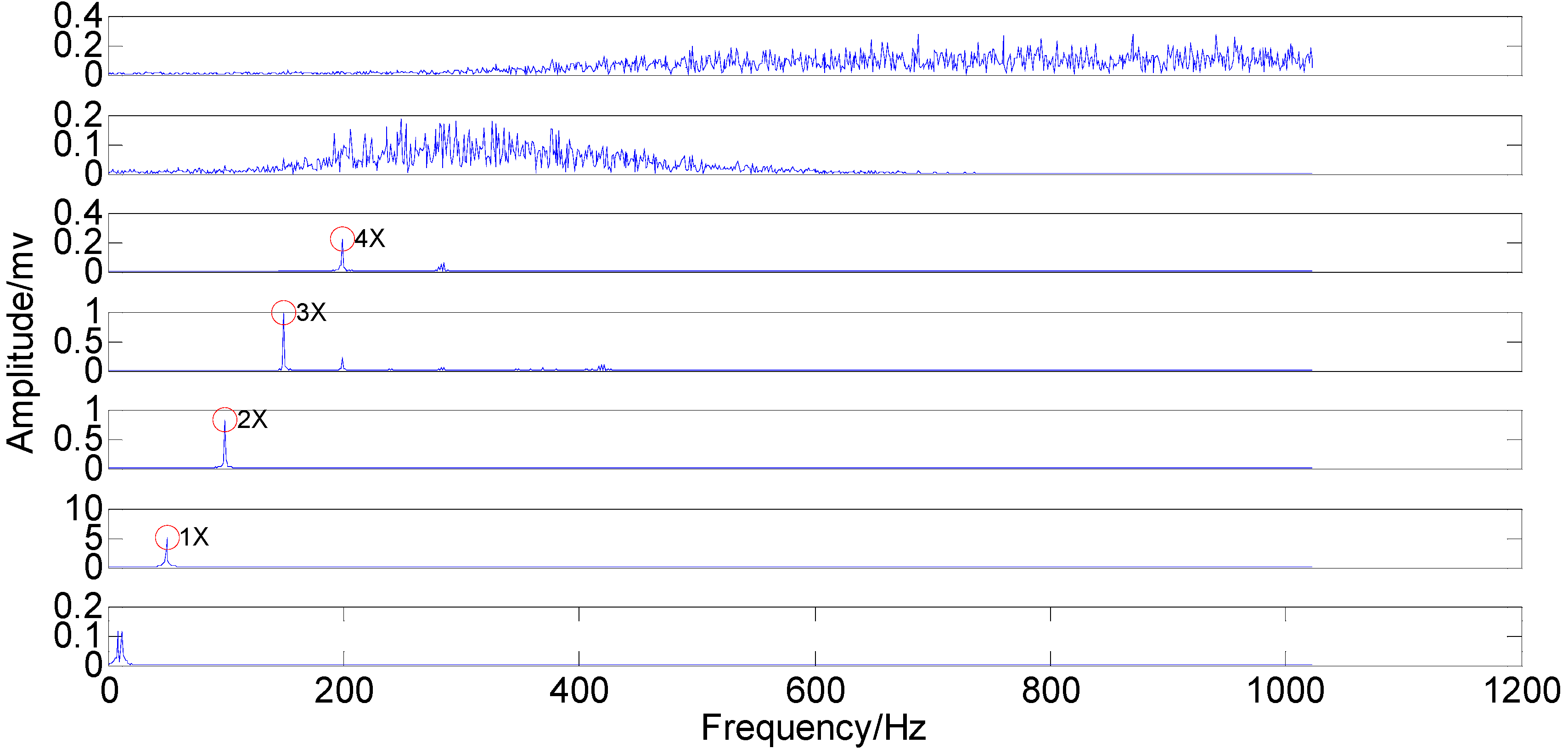
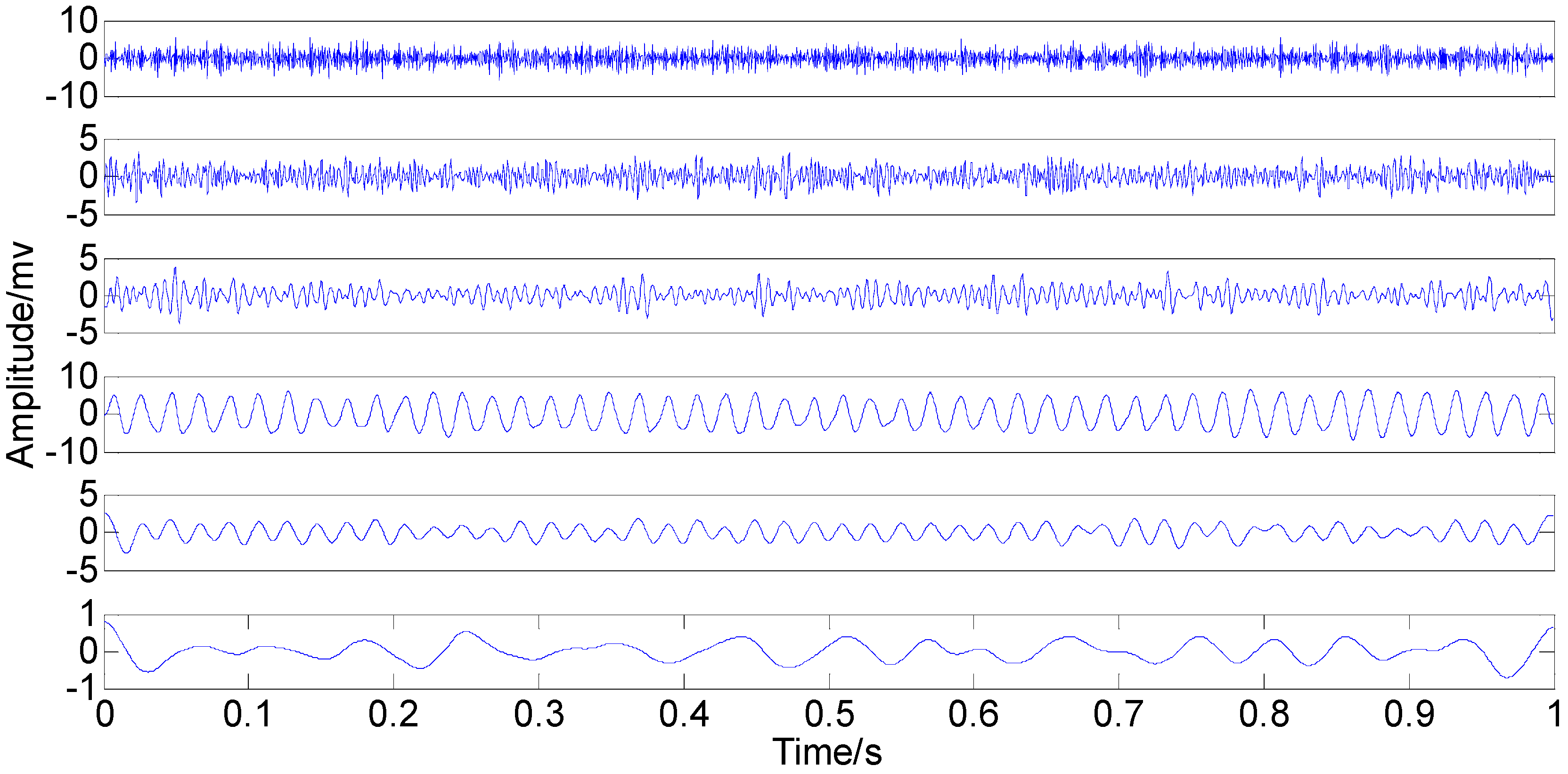
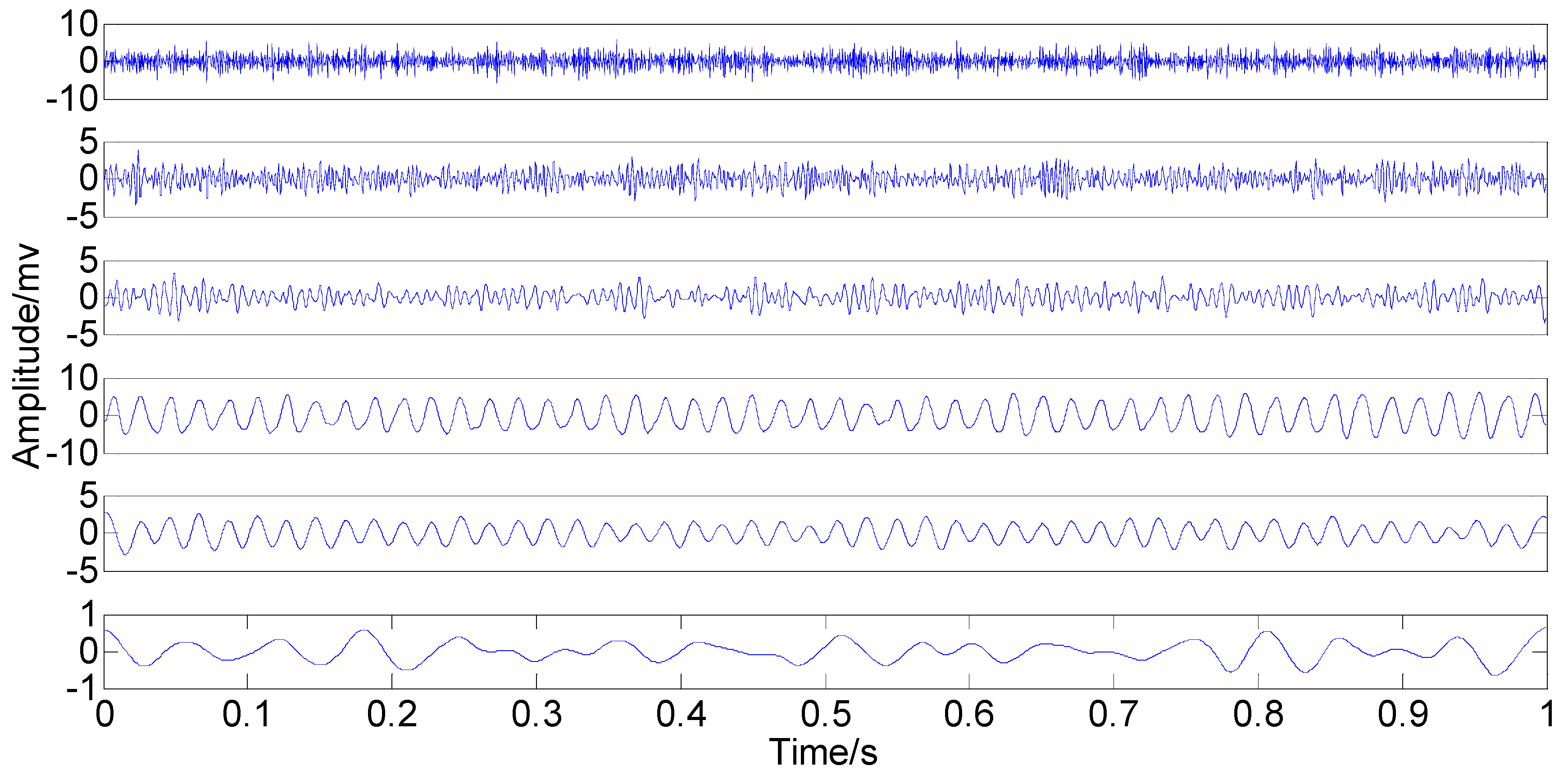
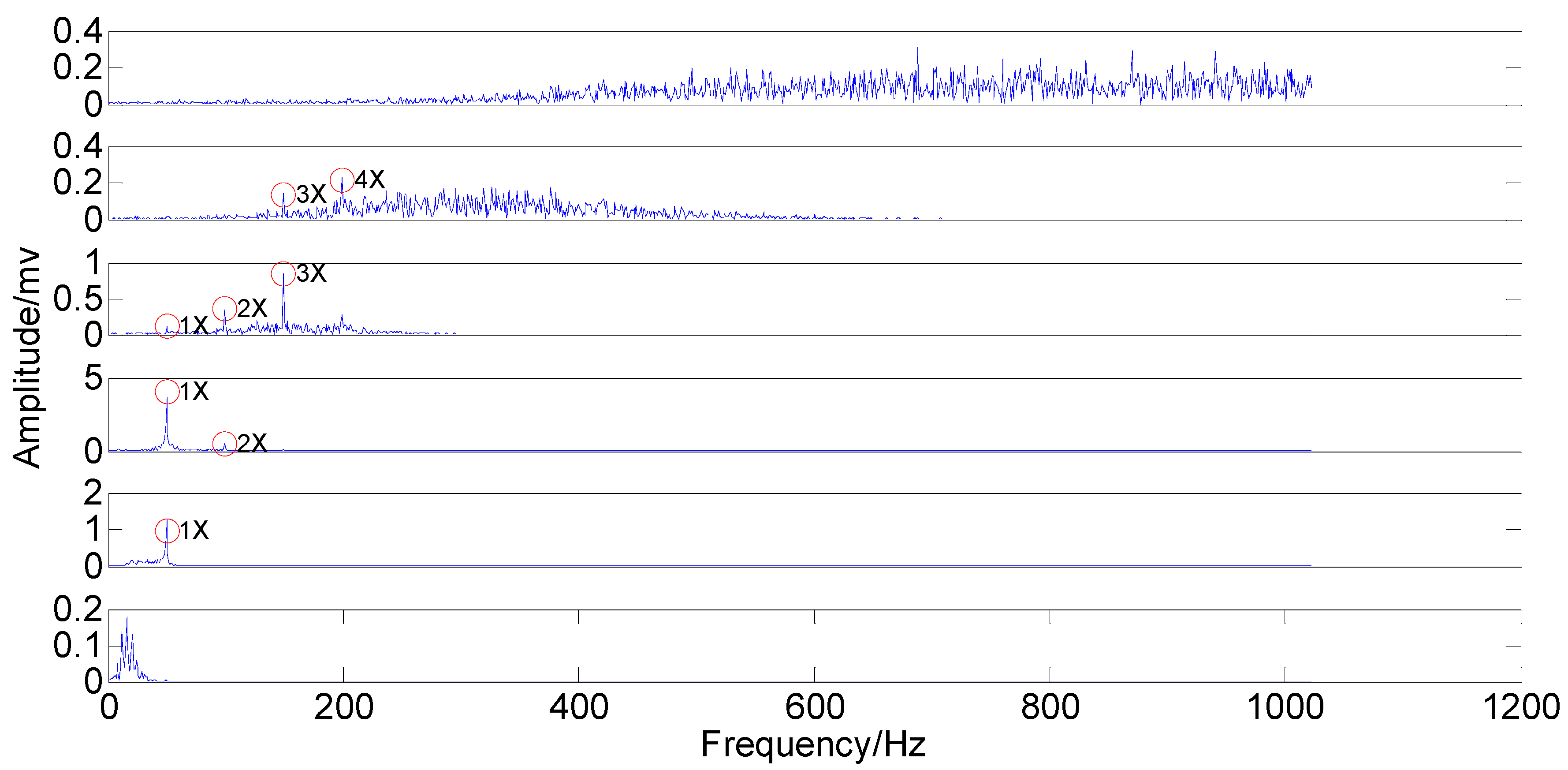
3.1. Preliminary Extraction of Signal Mode Based on EEMD
3.2. IMFs Reconstructed in Multi-Phase-Space
3.3. Modified IMFs Established by Element Storage
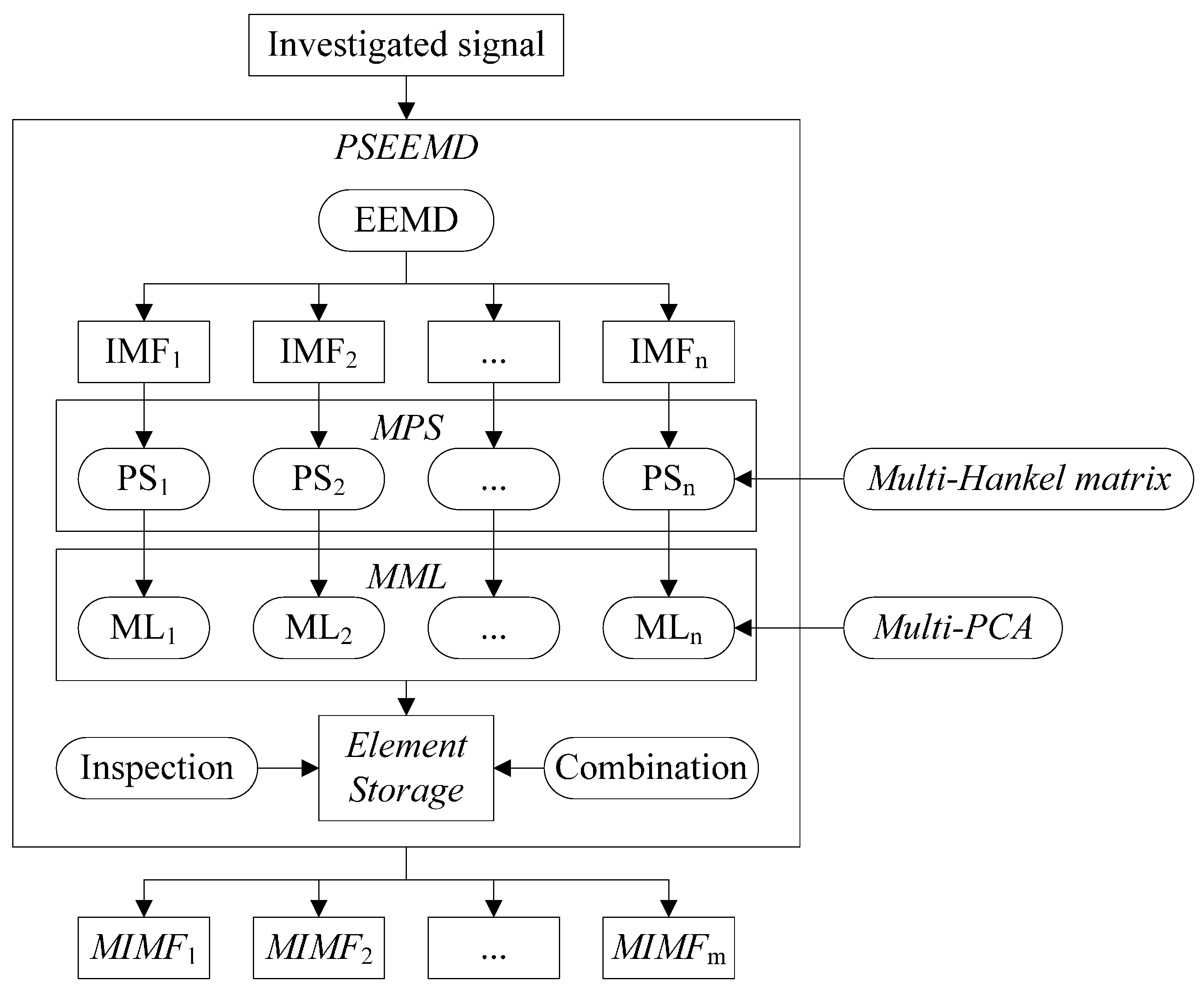
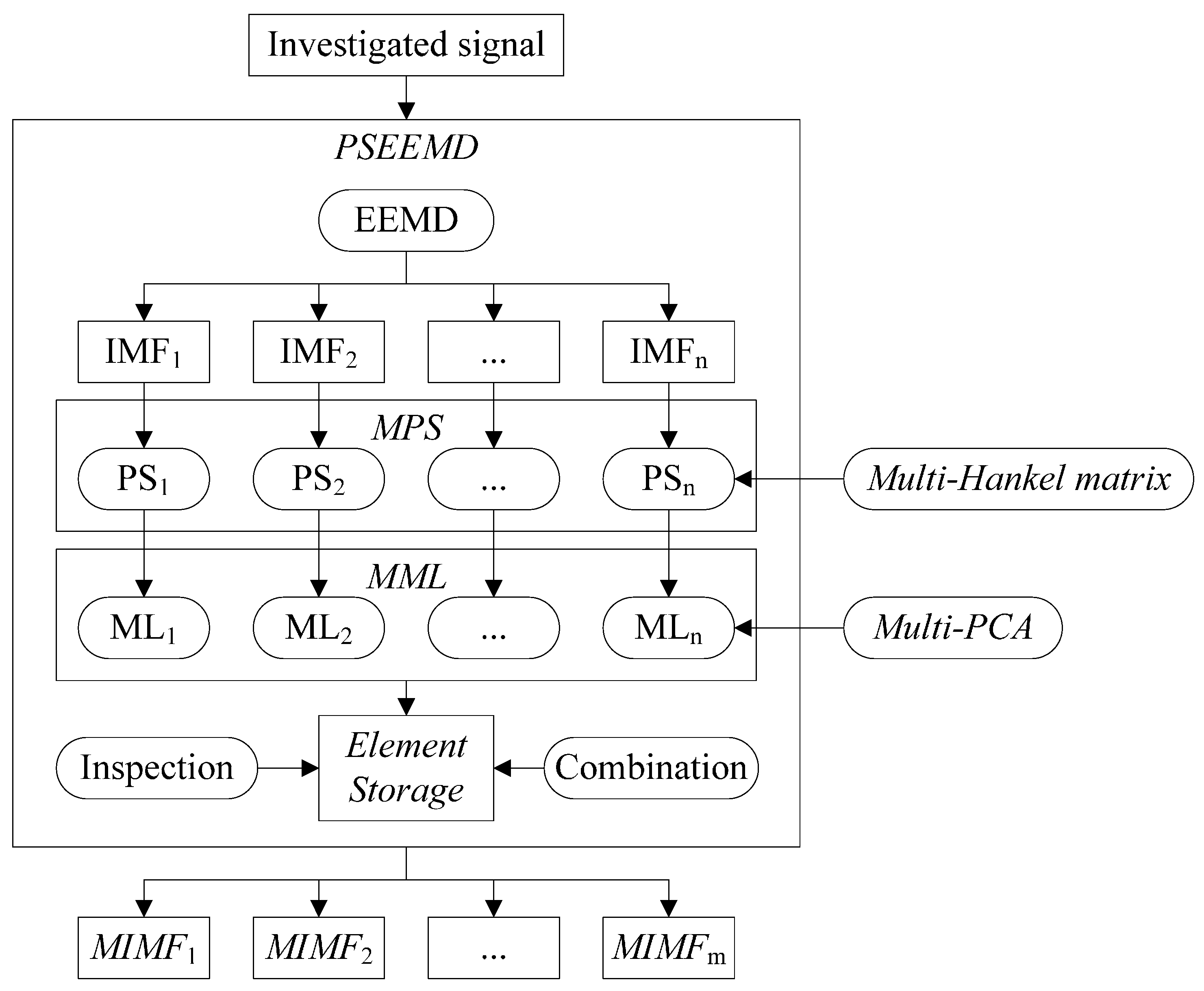
3.4. Overview of PSEEMD
- Step 1: Implement EEMD with the investigated signal and obtain the preliminary IMFs.
- Step 2: Select required IMFs and construct MPS by the multi-Hankel-matrix.
- Step 3: Extract elements from MPS by MML of Multi-PCA and develop the element storage.
- Step 4: Inspect the element storage and combine the same kind of elements.
- Step 5: Reconstruct MIMFs.
- No.1: The amplitude of added noise in EEMD is set to be 0.2 times of the investigated signal standard deviation or an optimized value. The following verification with PSEEMD in Section 3.5 indicates that almost no difference exists between these two arrangements.
- No.2: Required IMFs should be selected according to some prior knowledge or indicators of the investigated signal.
- No.3: The element storage may be enormous and some prior knowledge may be also used to inspect and combine the same kind of elements.
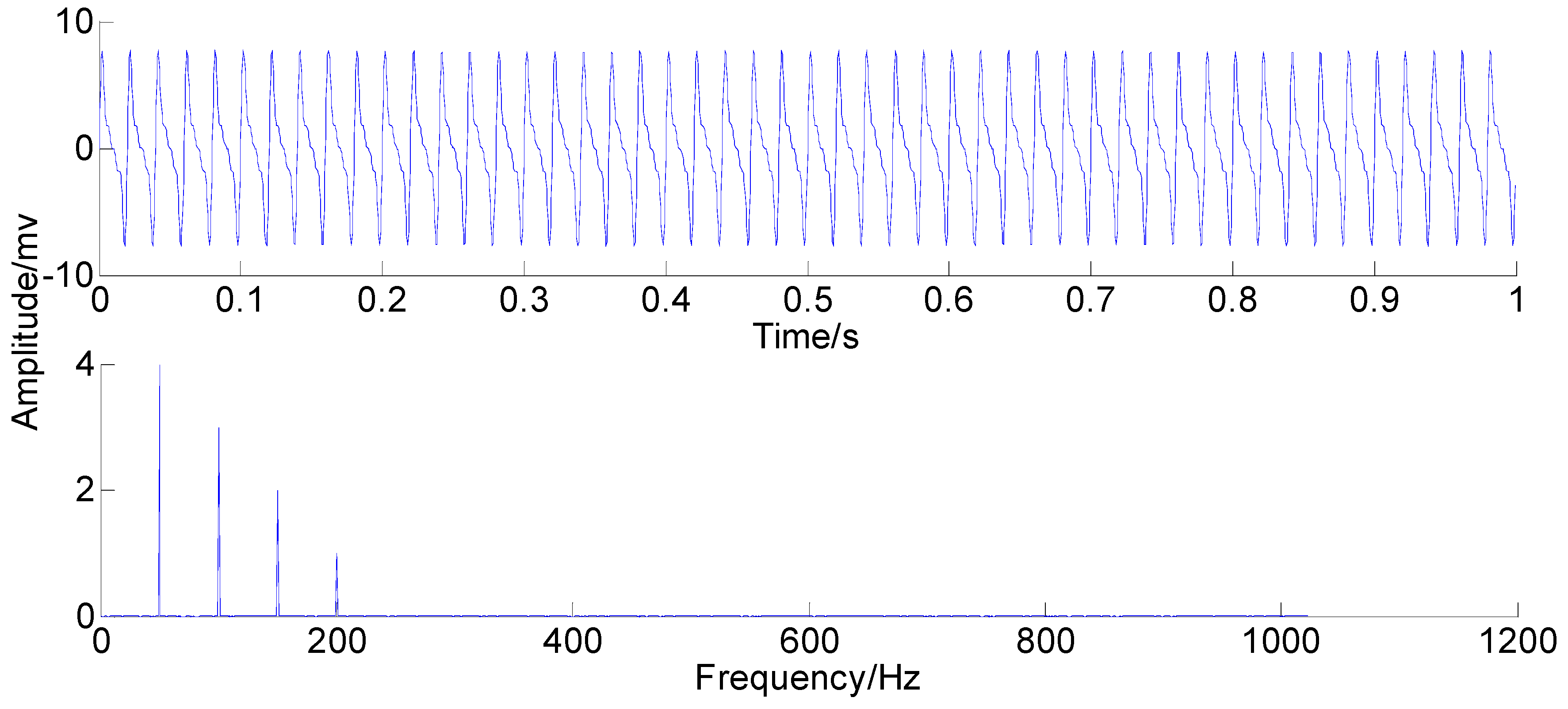
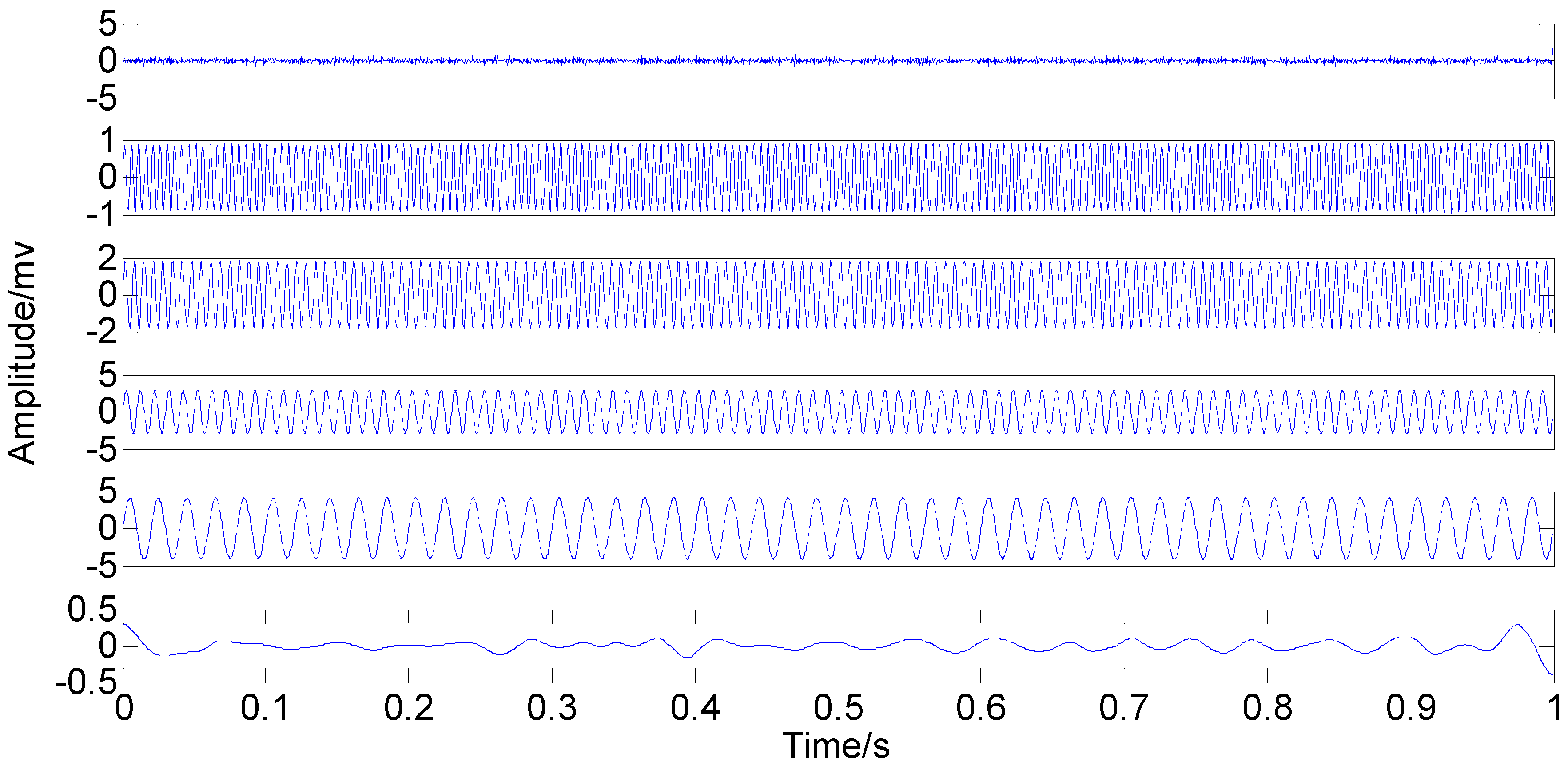
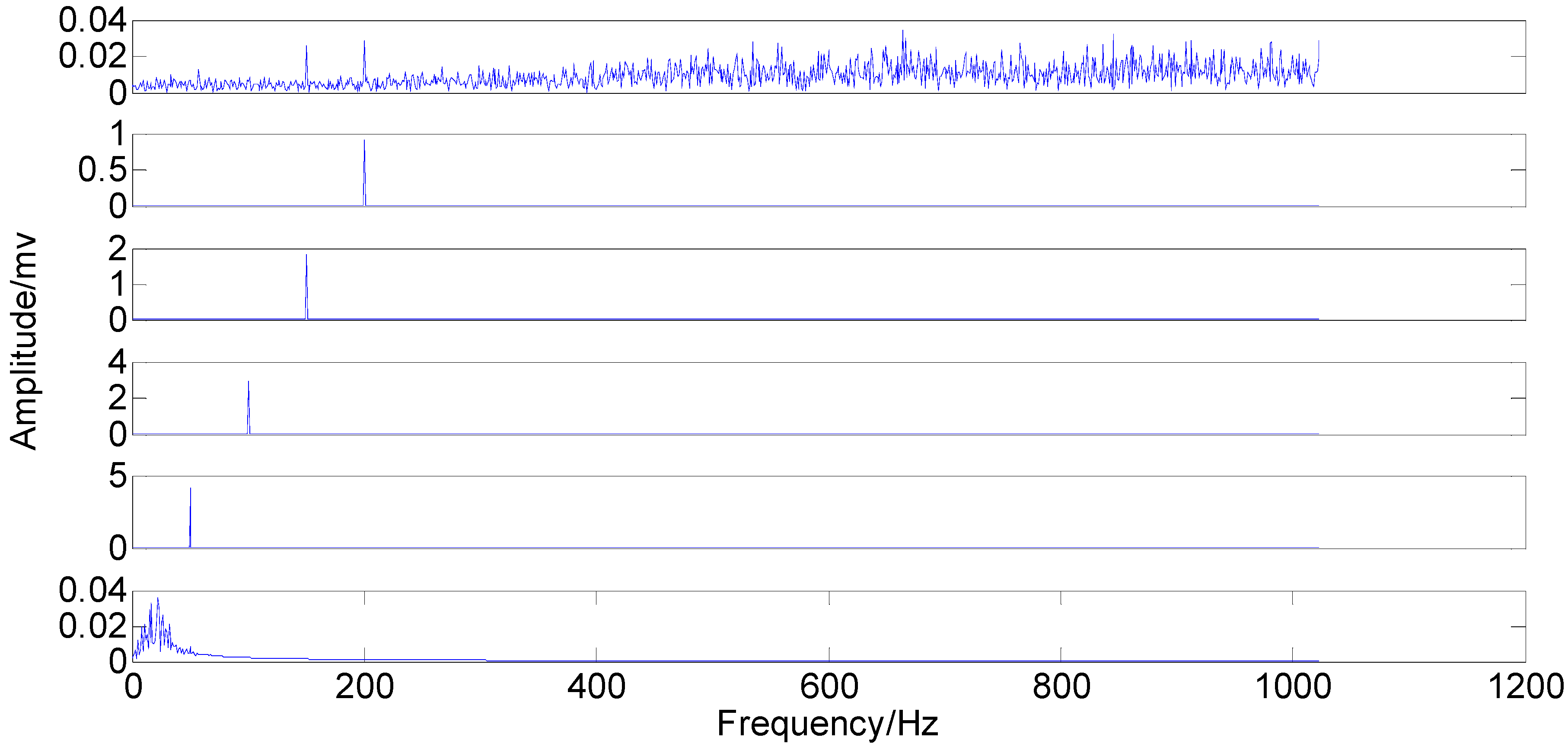
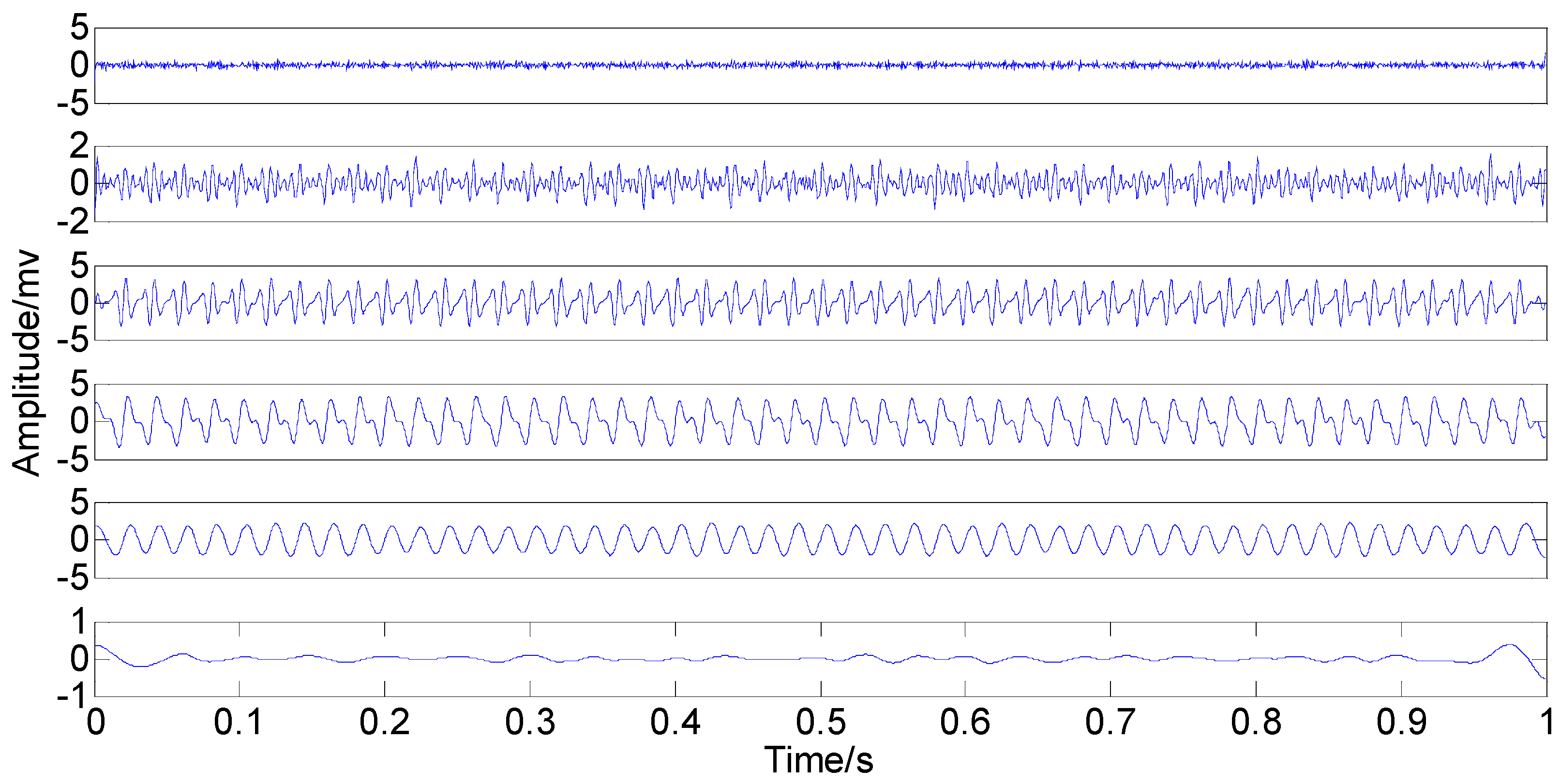
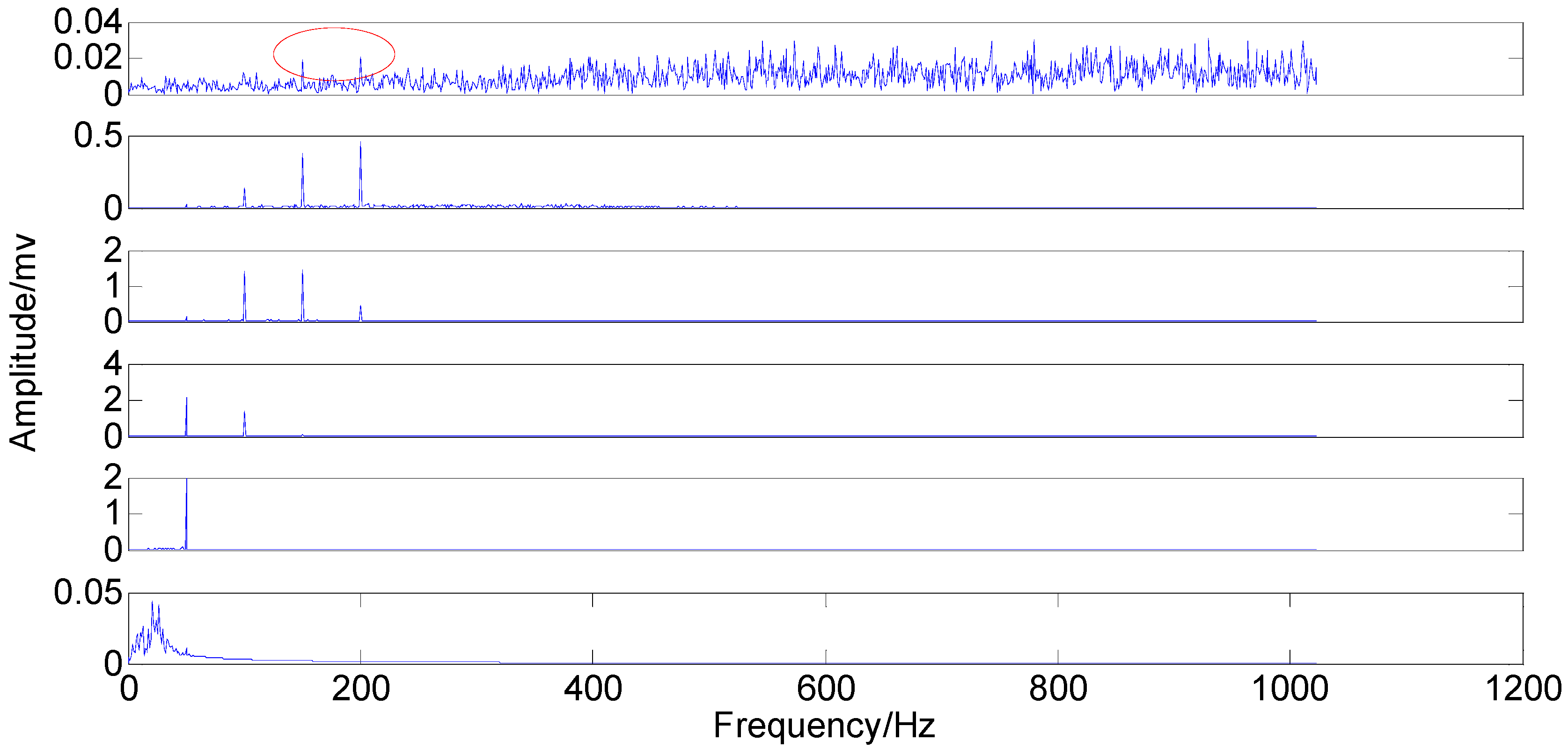
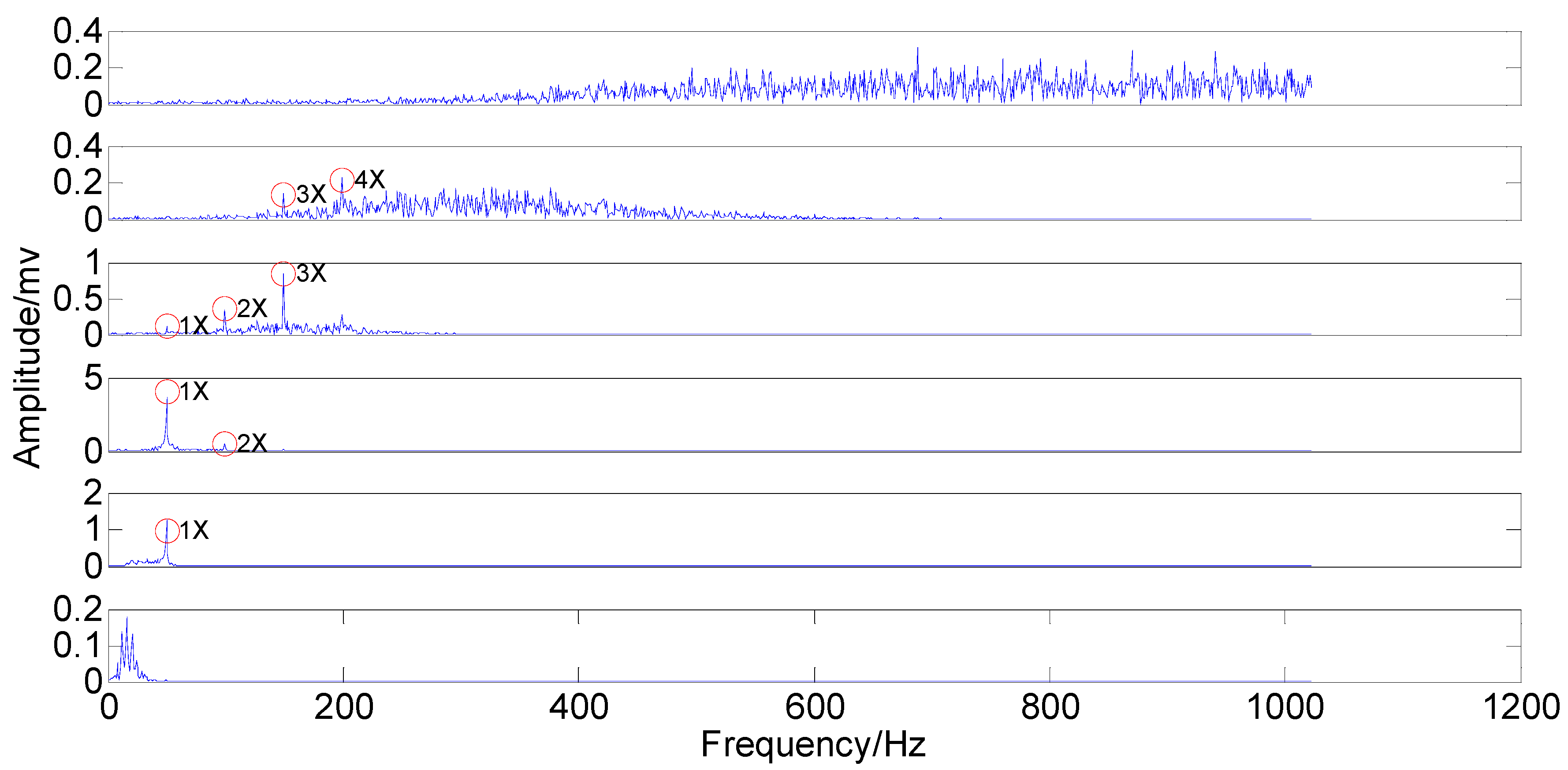
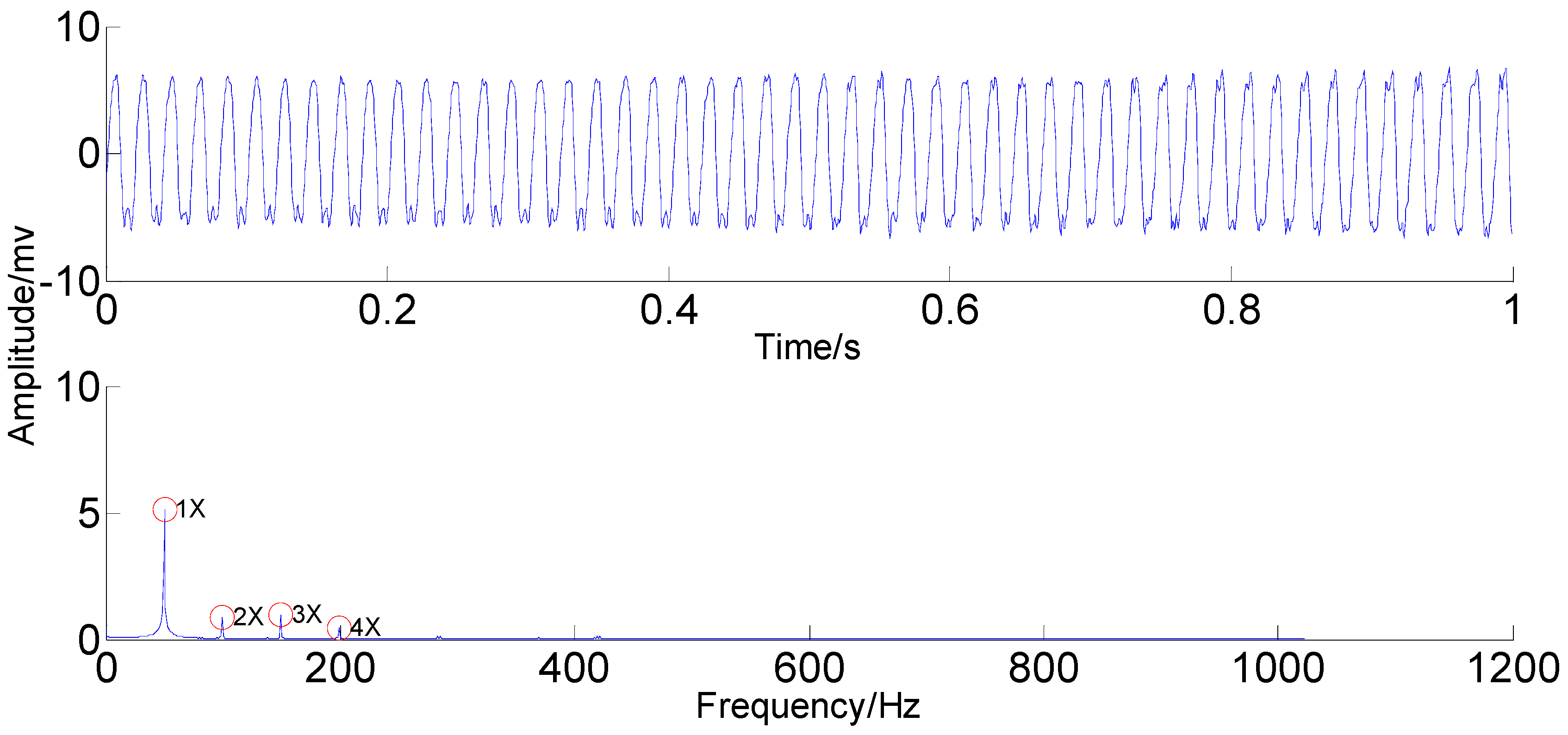
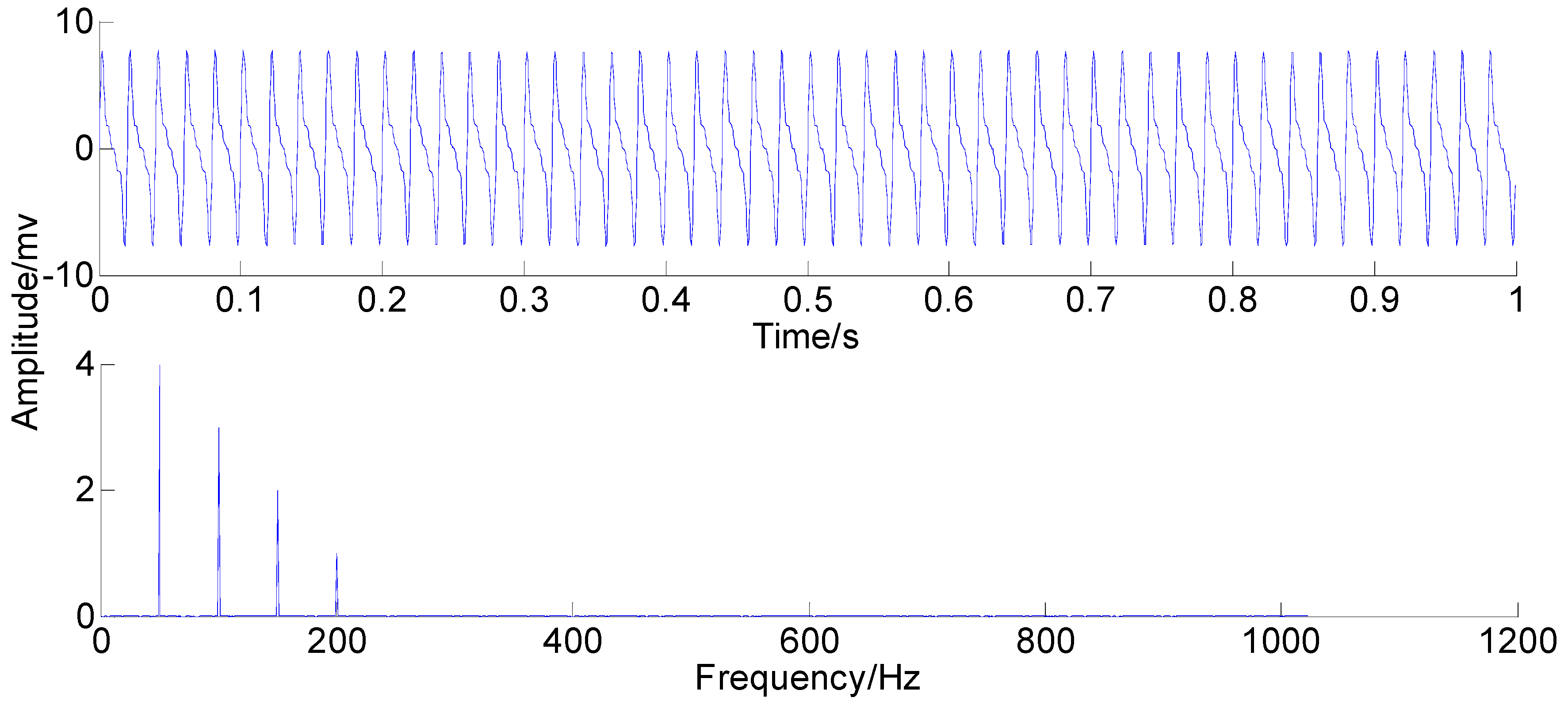
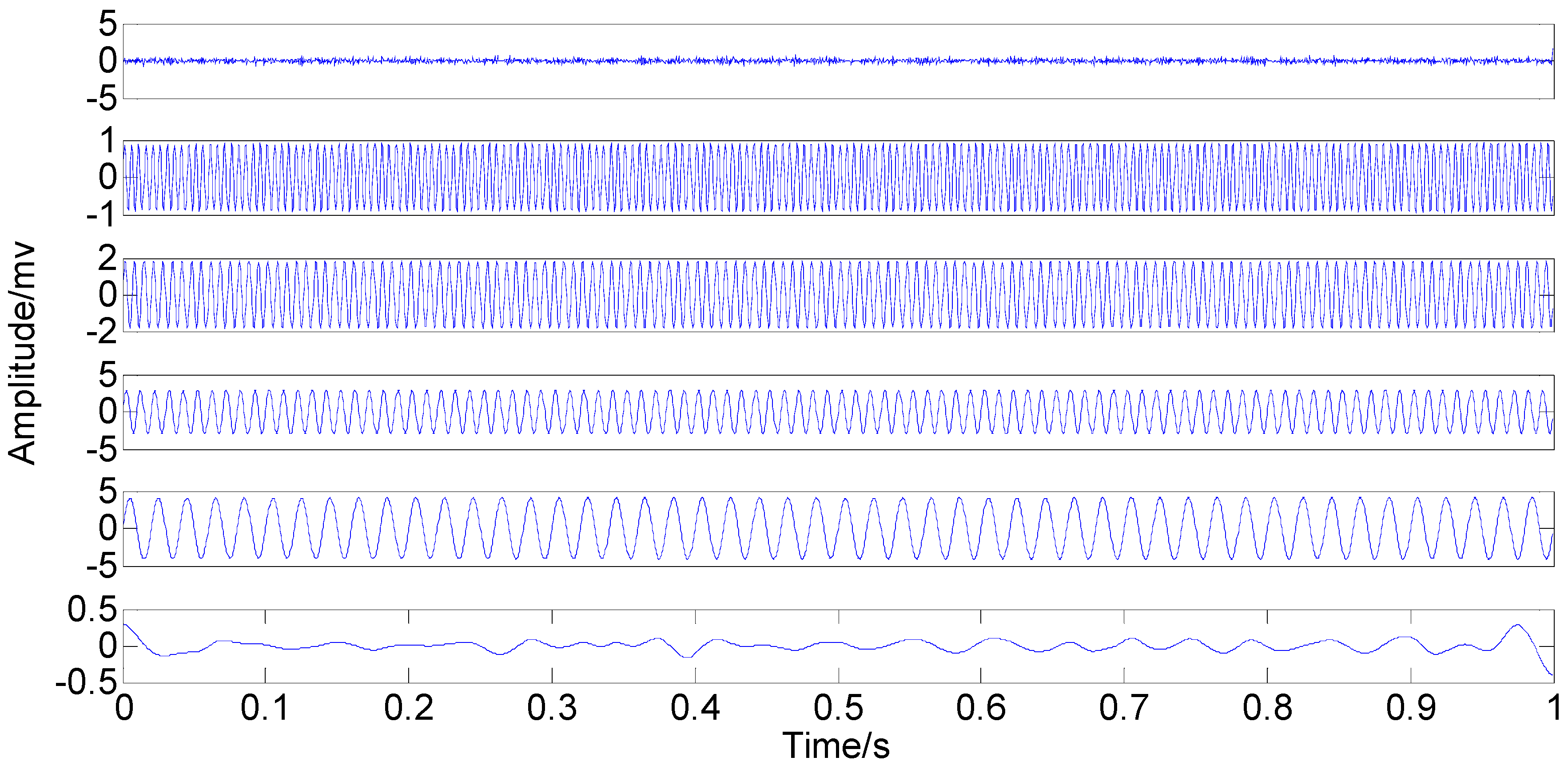
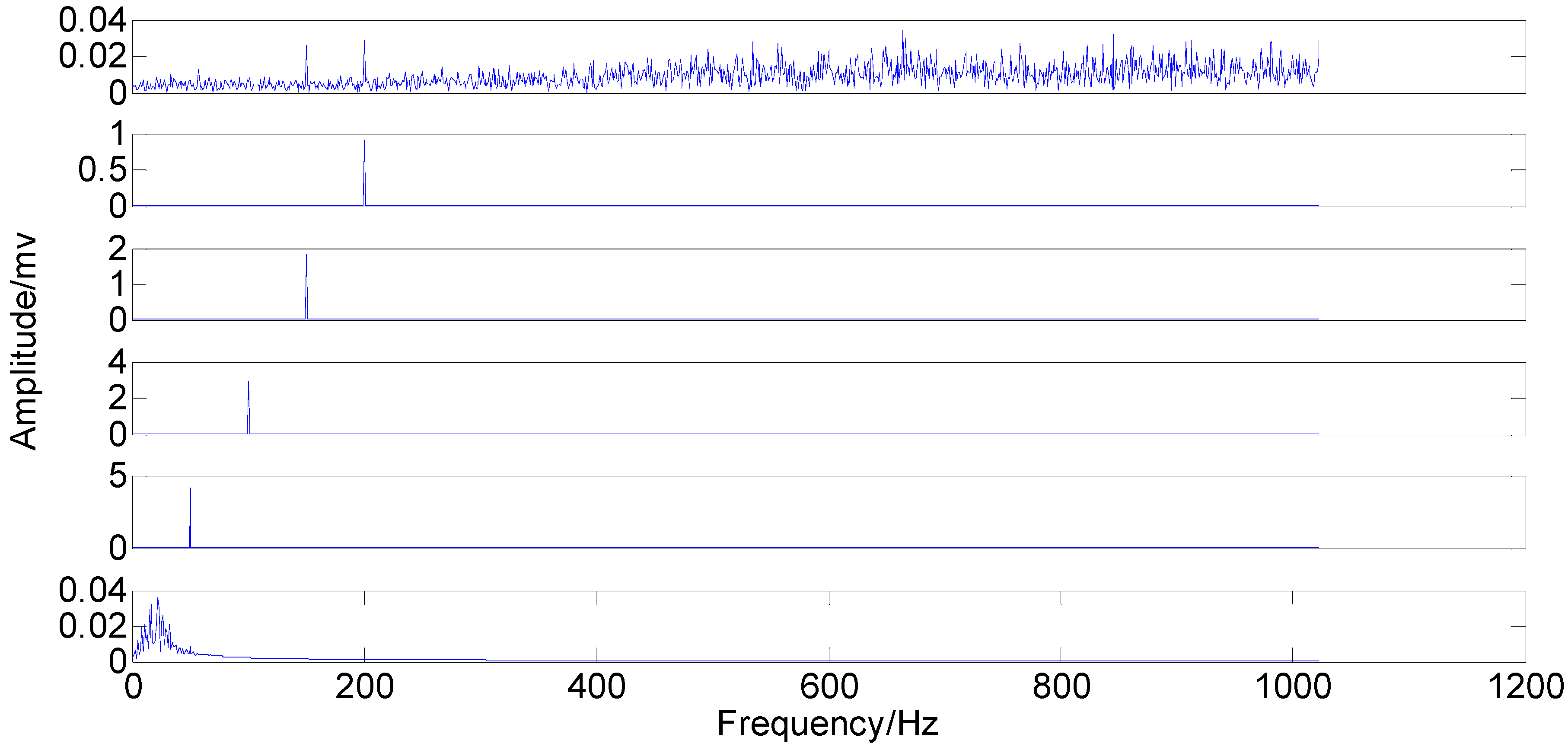
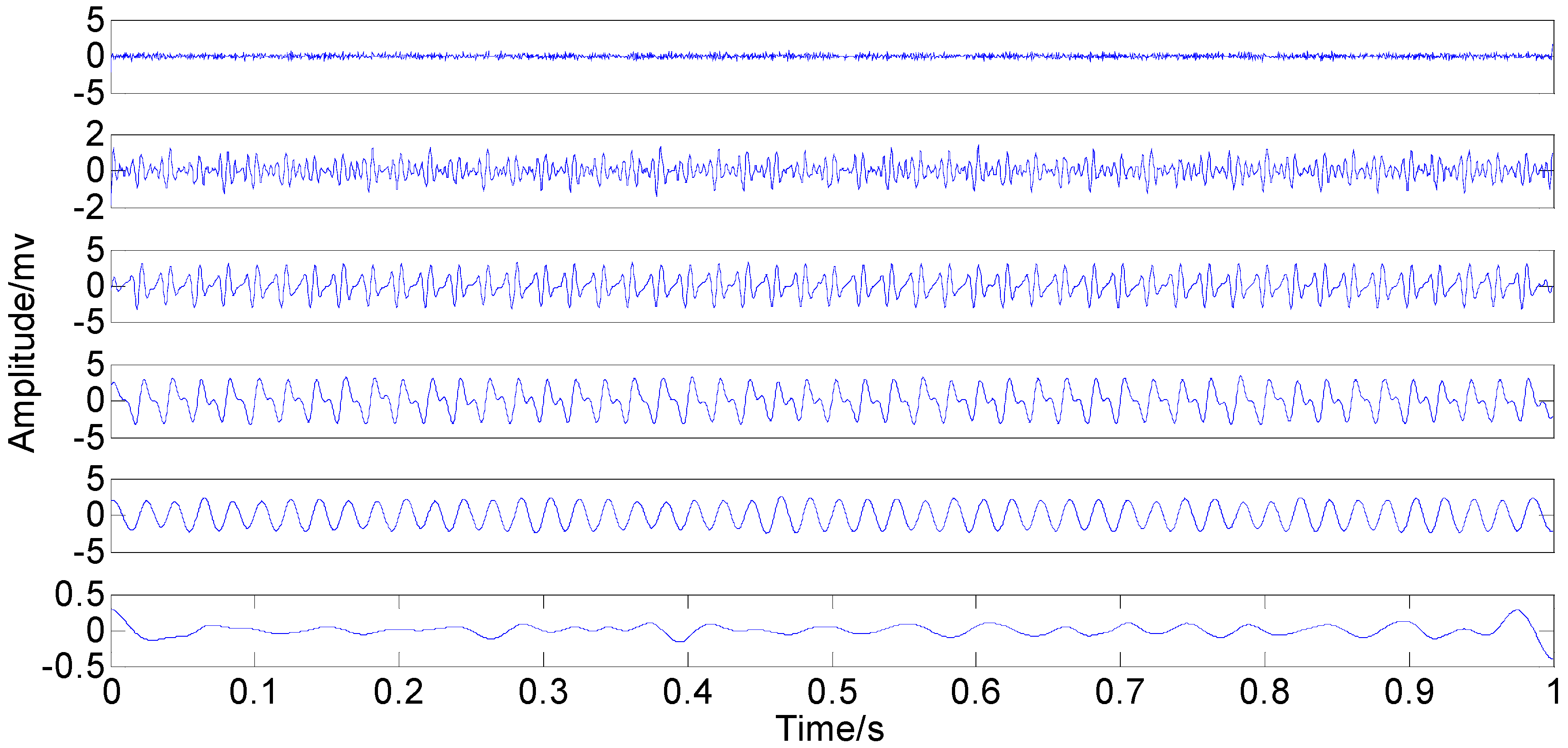
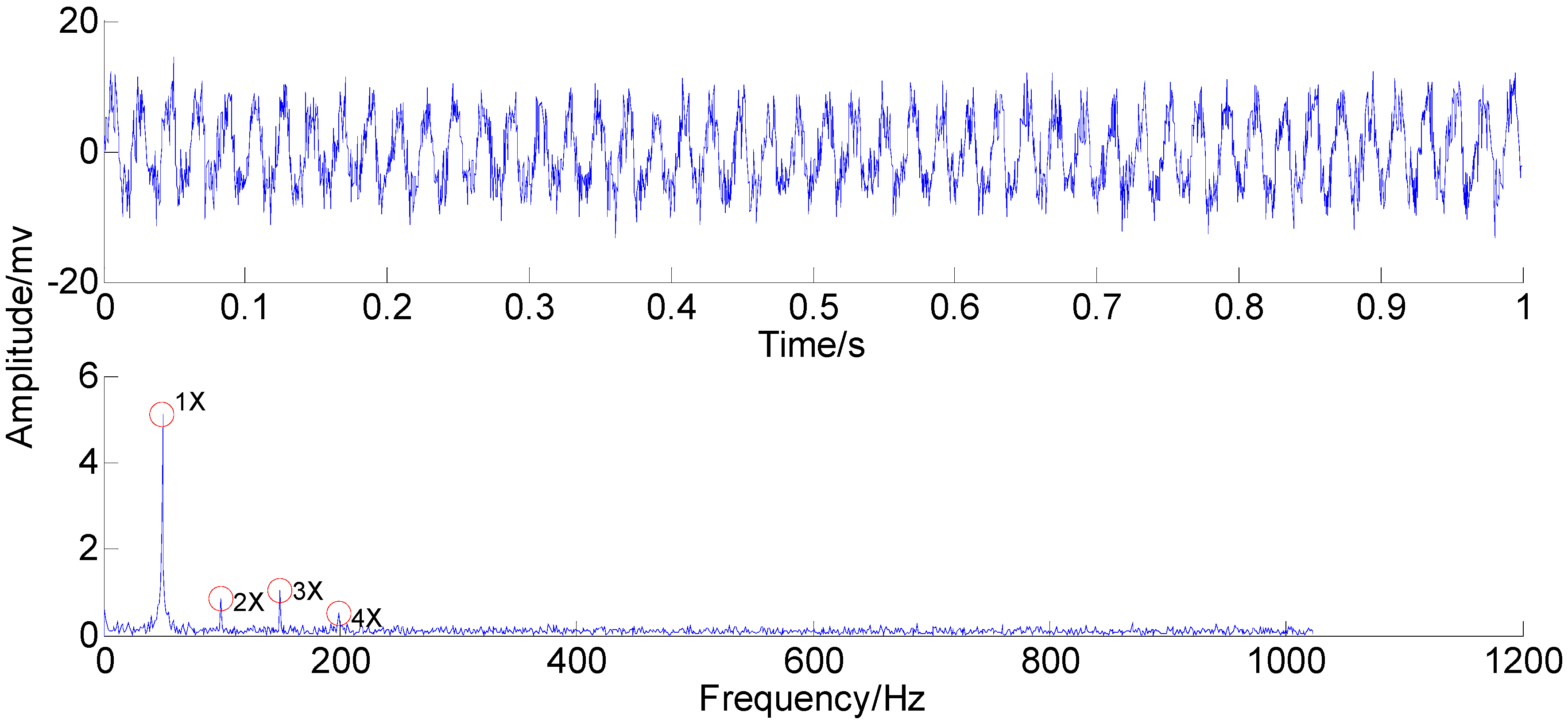
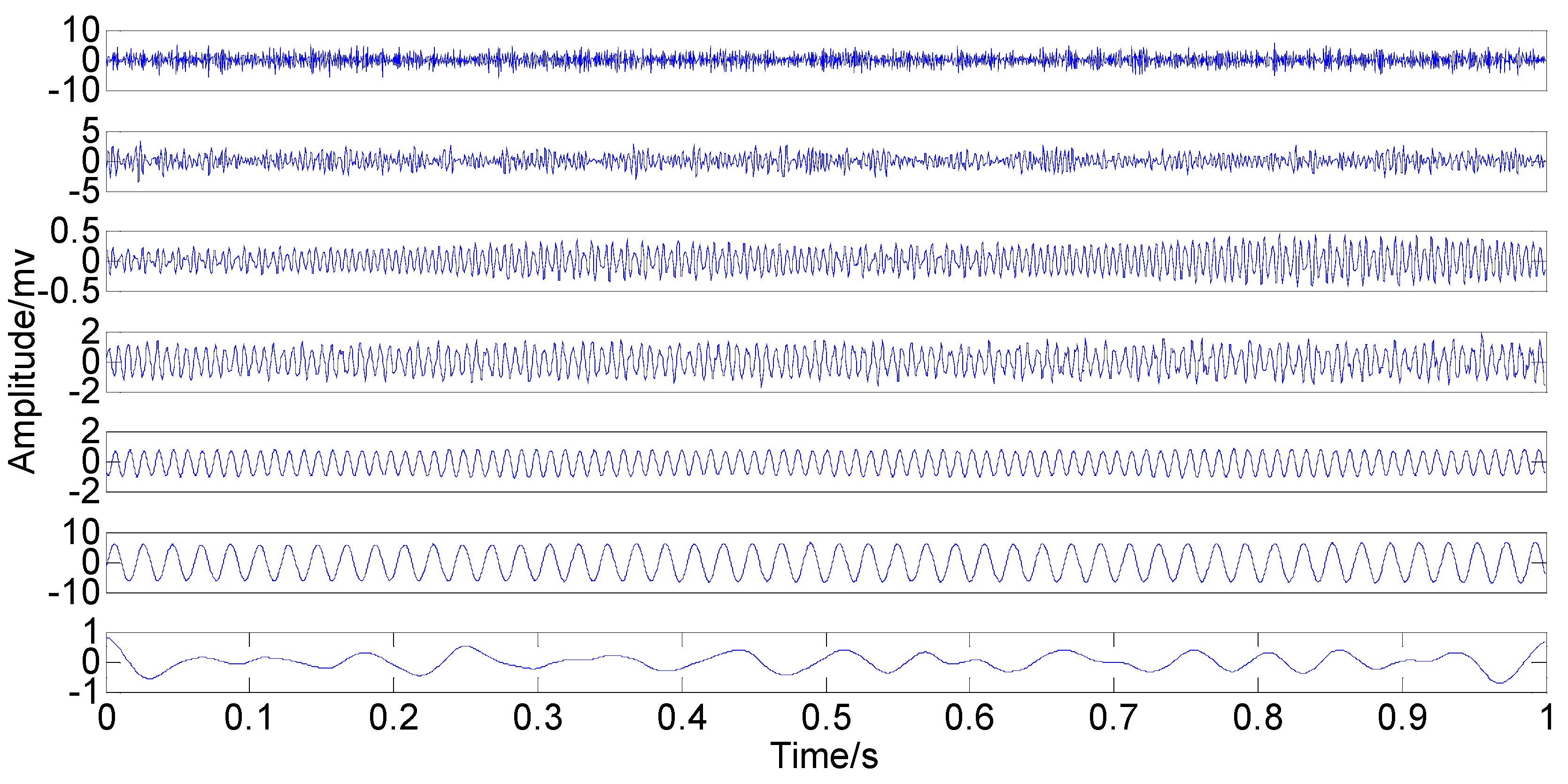
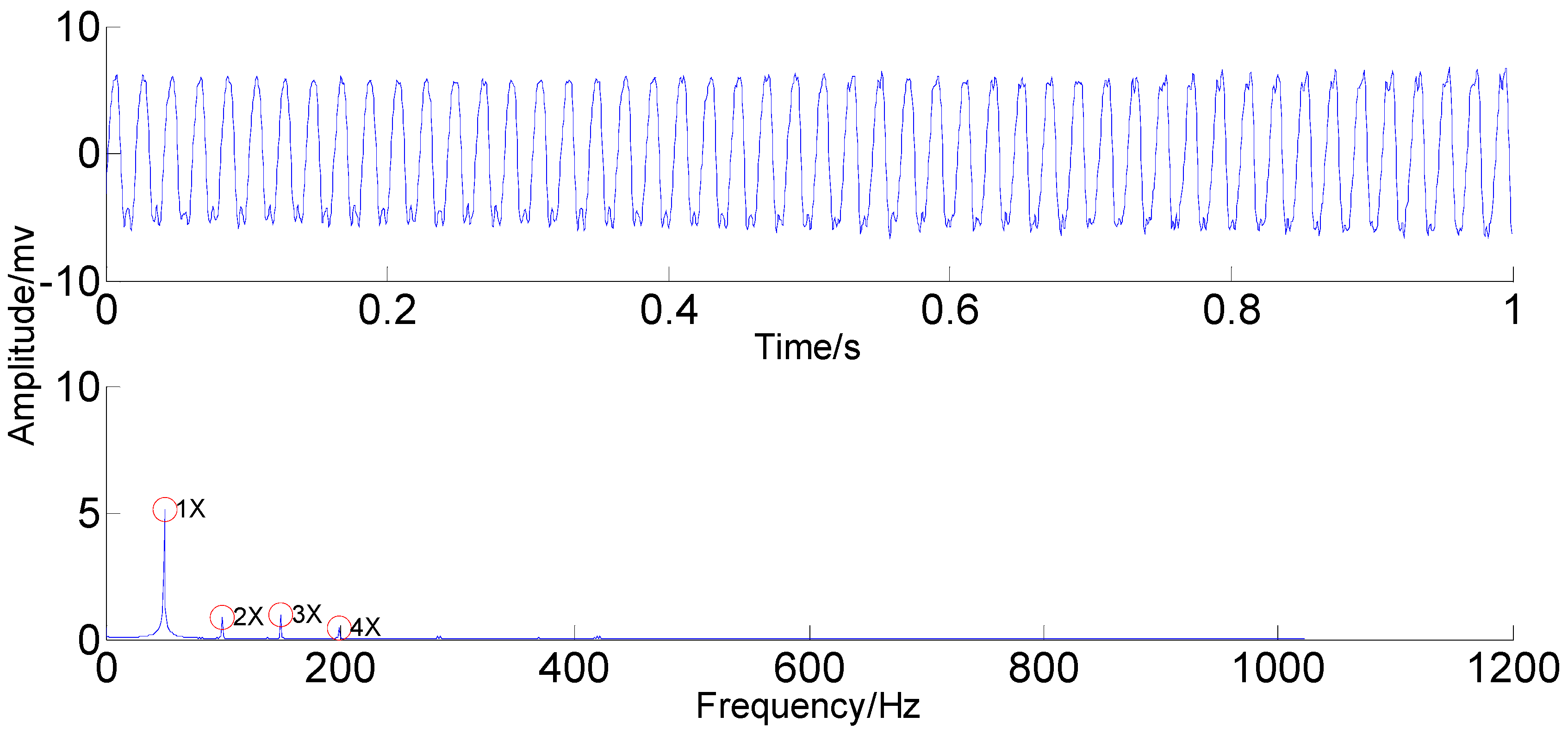
3.5. Simulation Verification

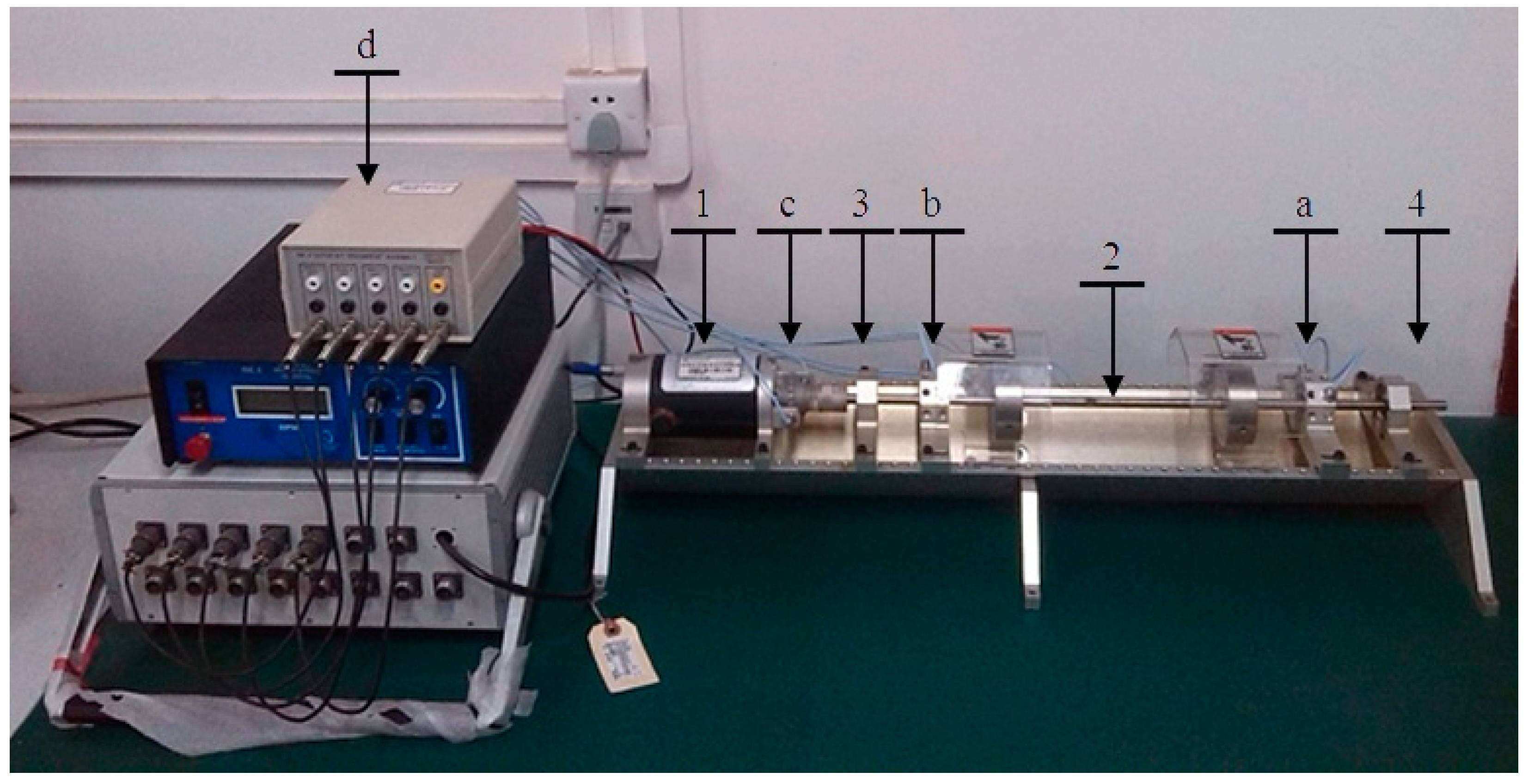
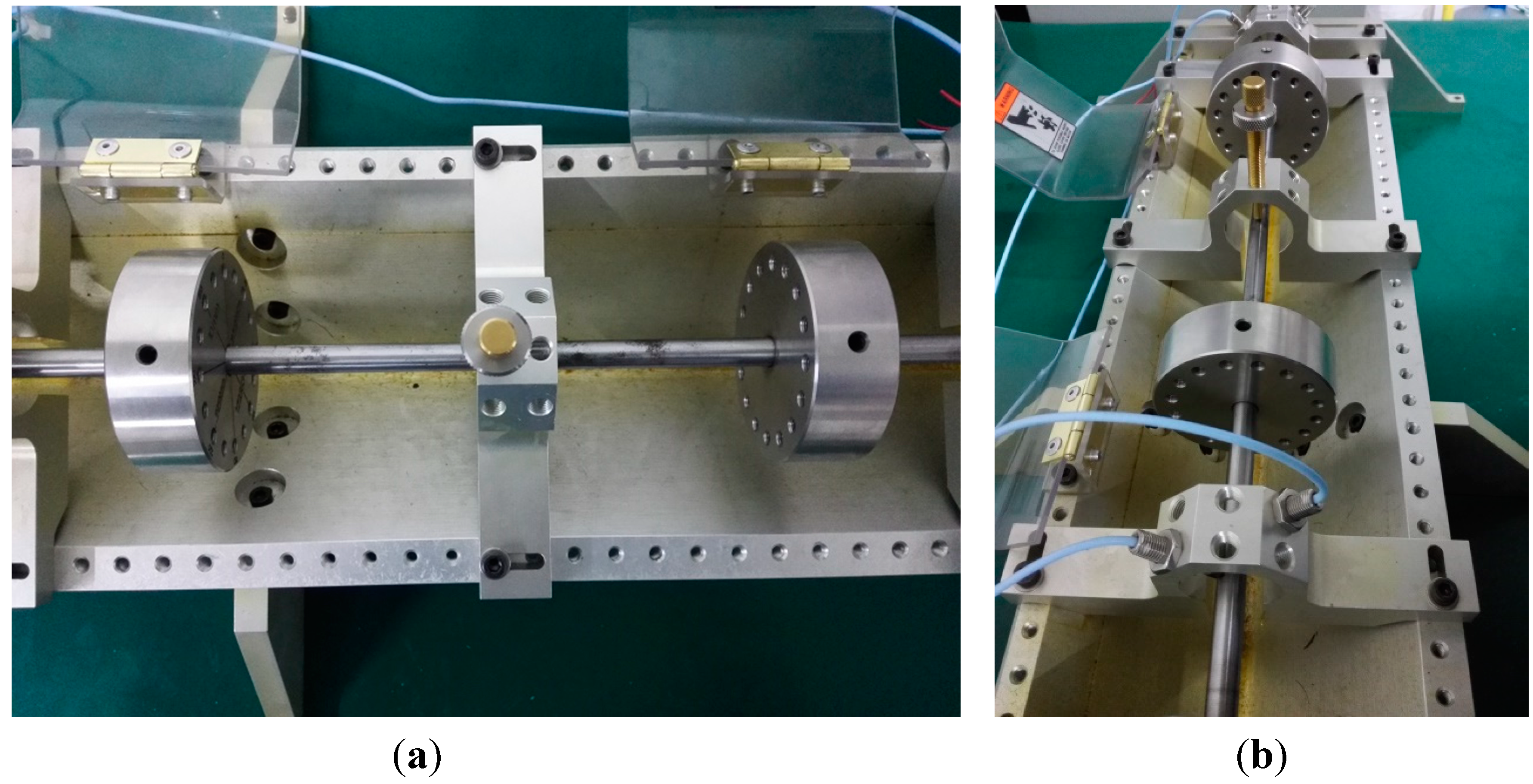
4. Experimental Presentation for Feature Extraction of Faulted Rotor System
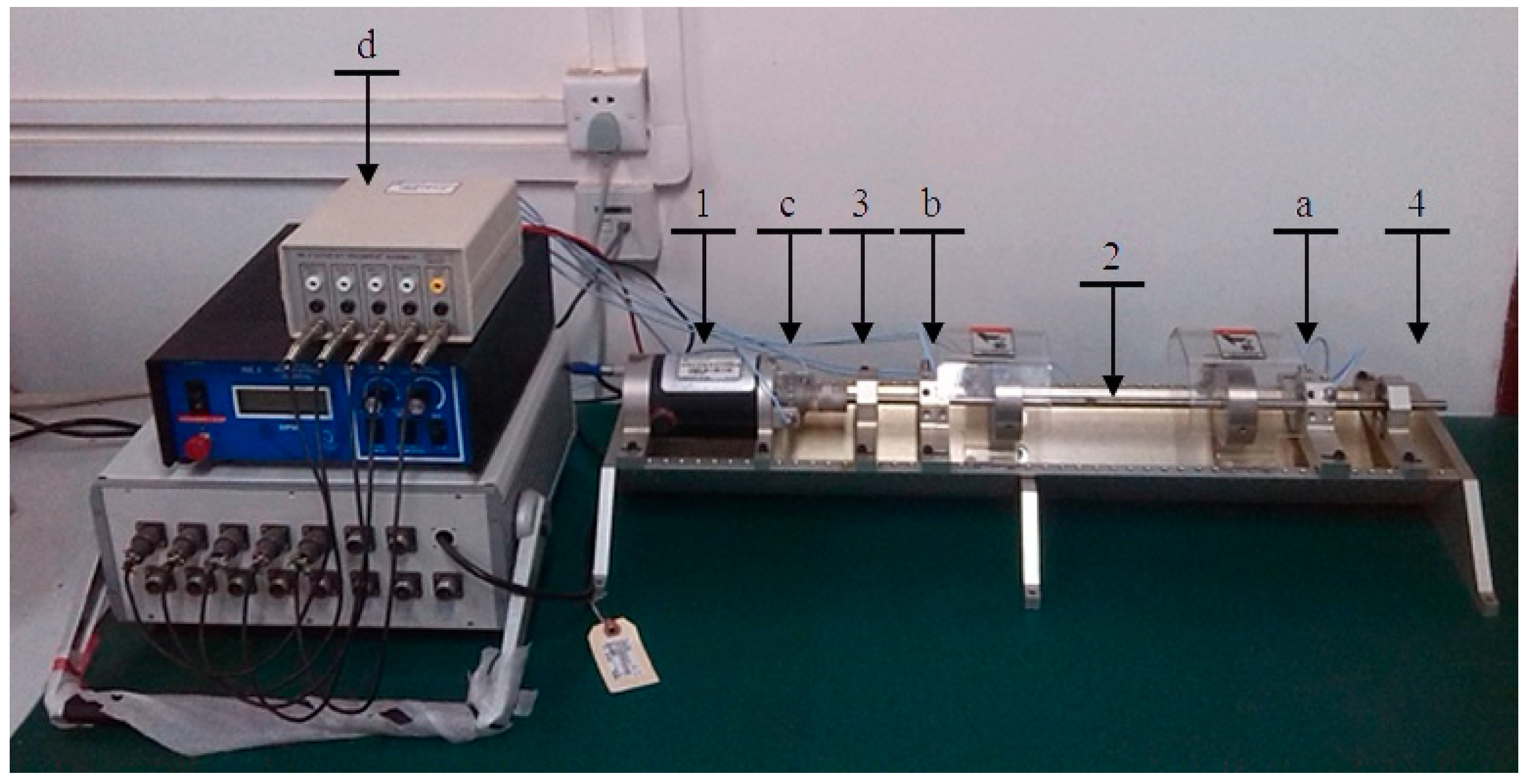
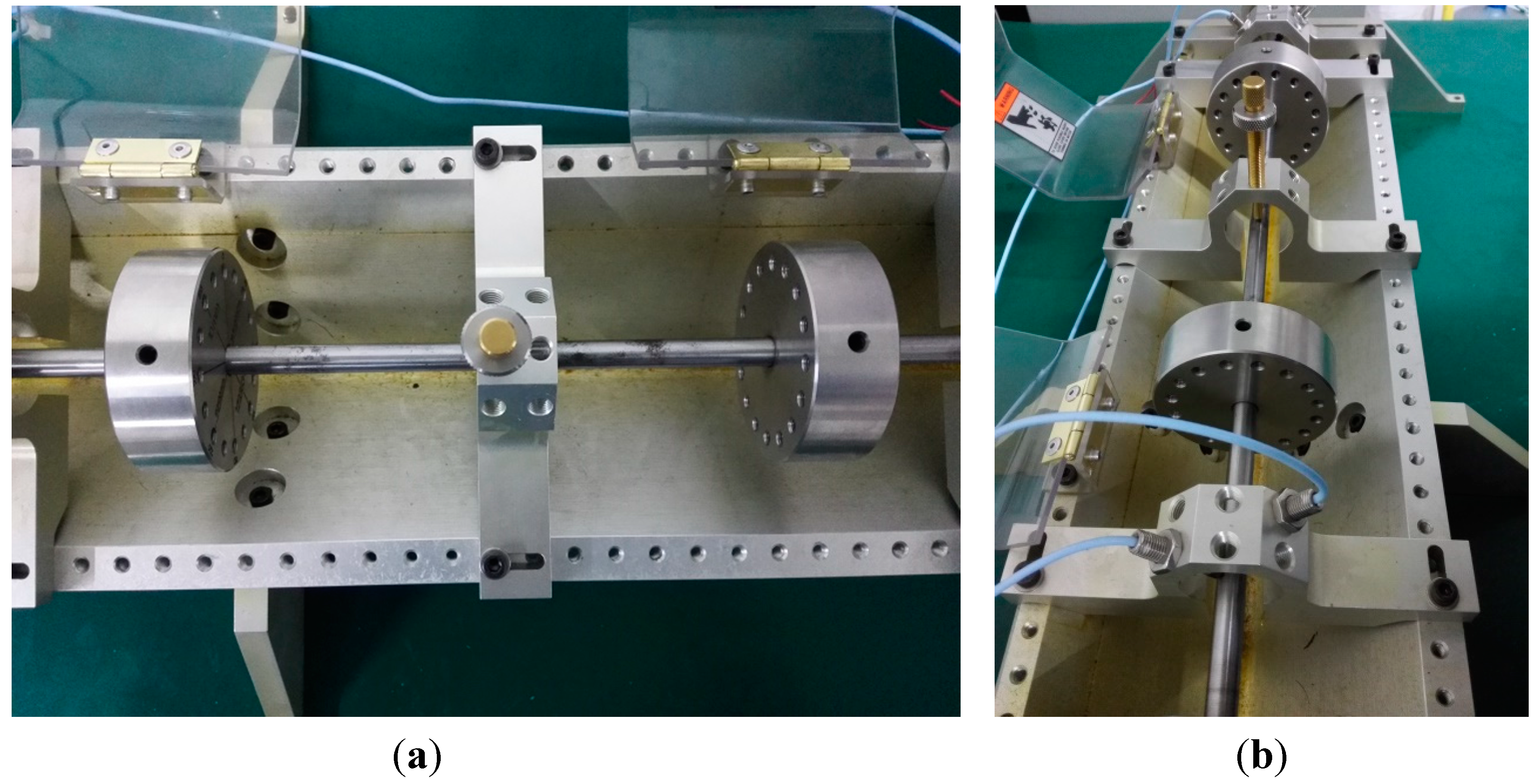
4.1. Brief Introduction of Experiment on Rotor System
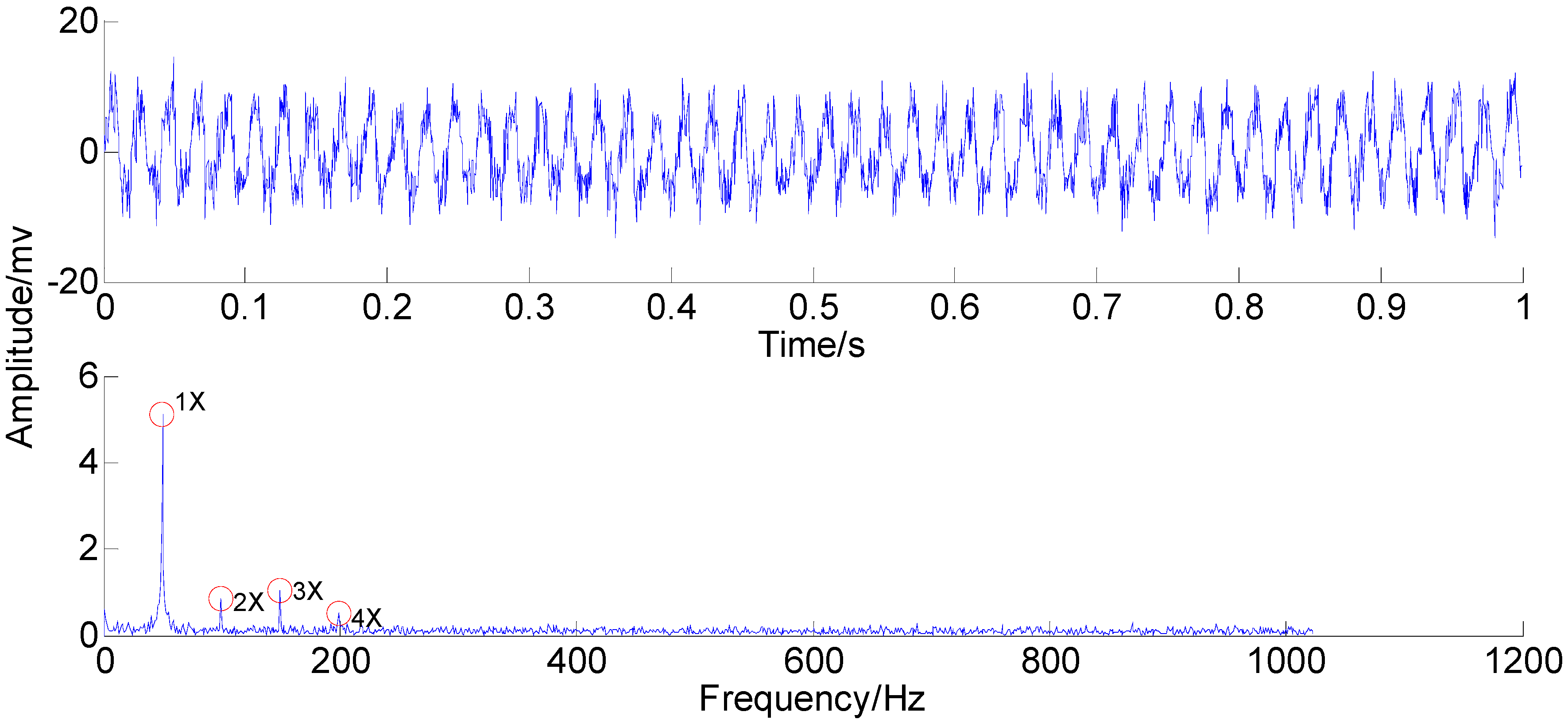
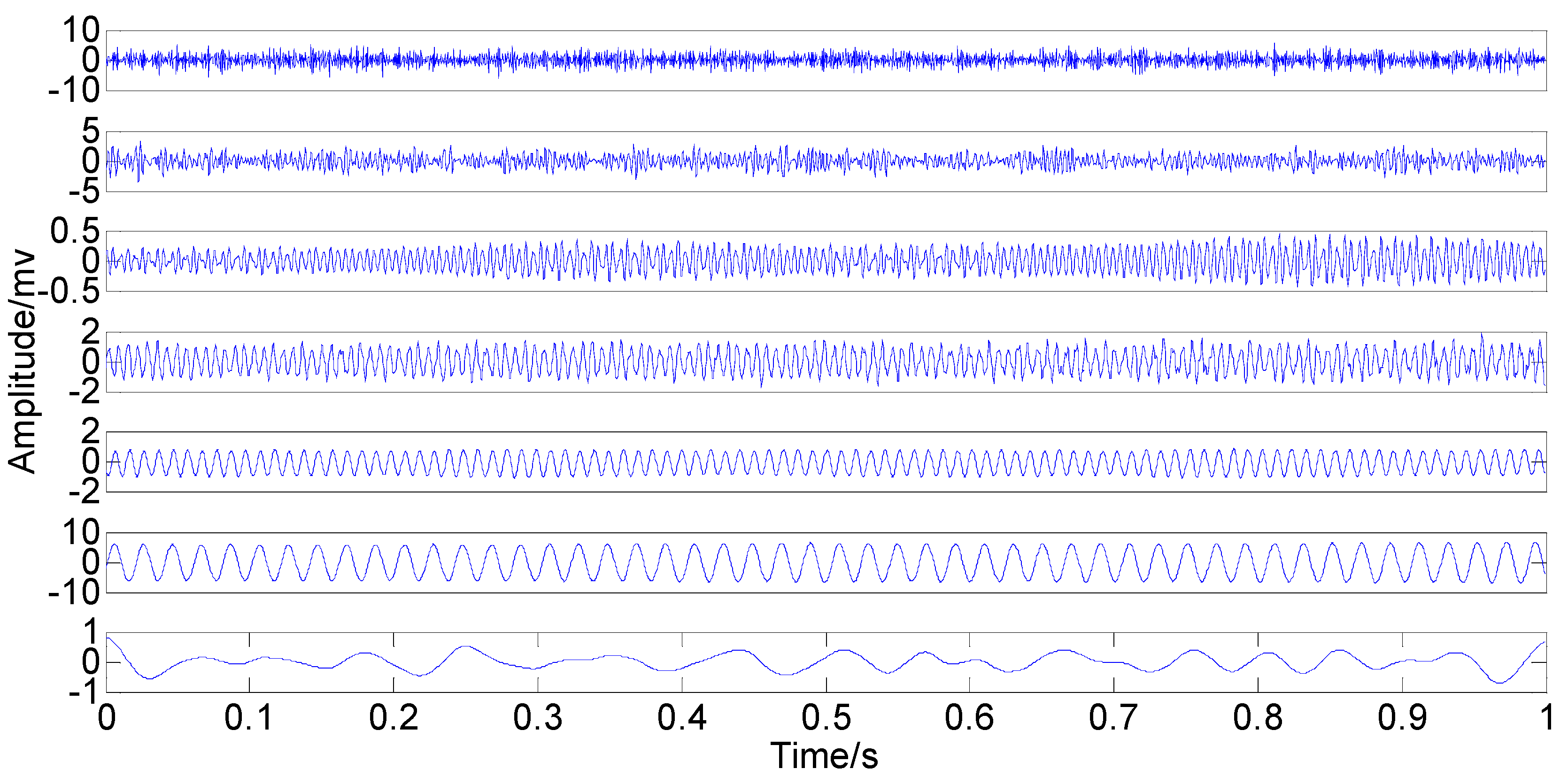
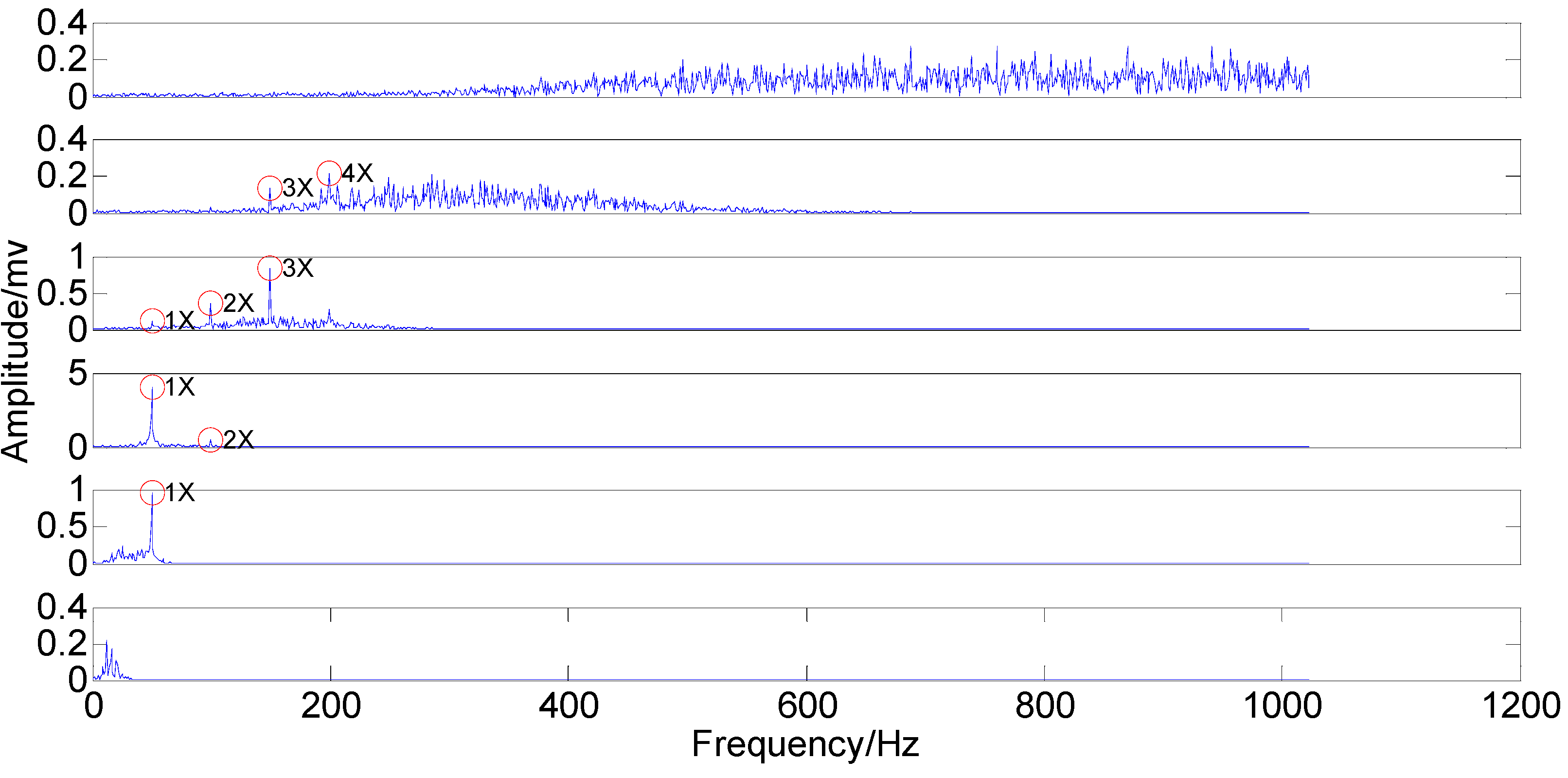
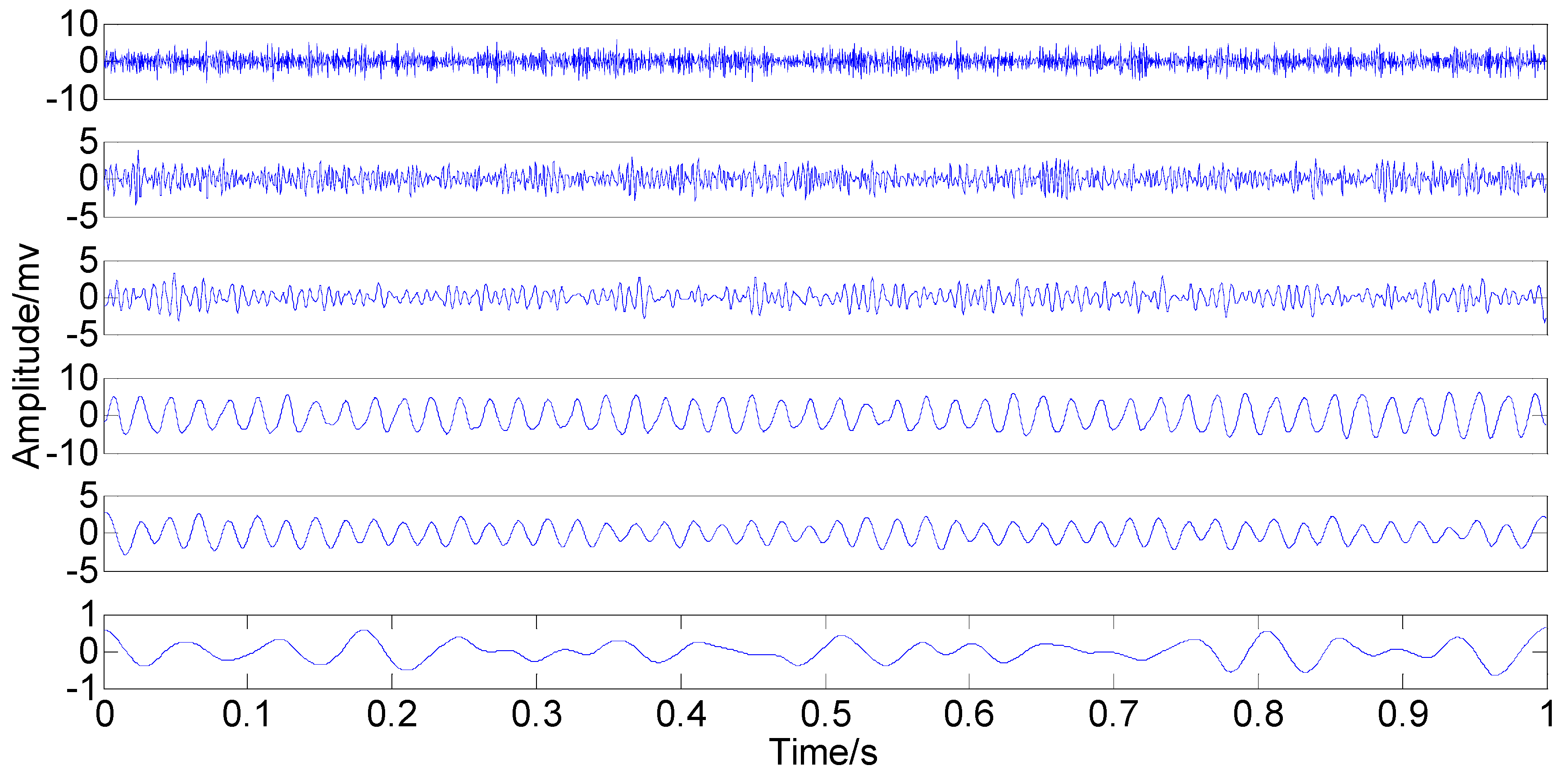
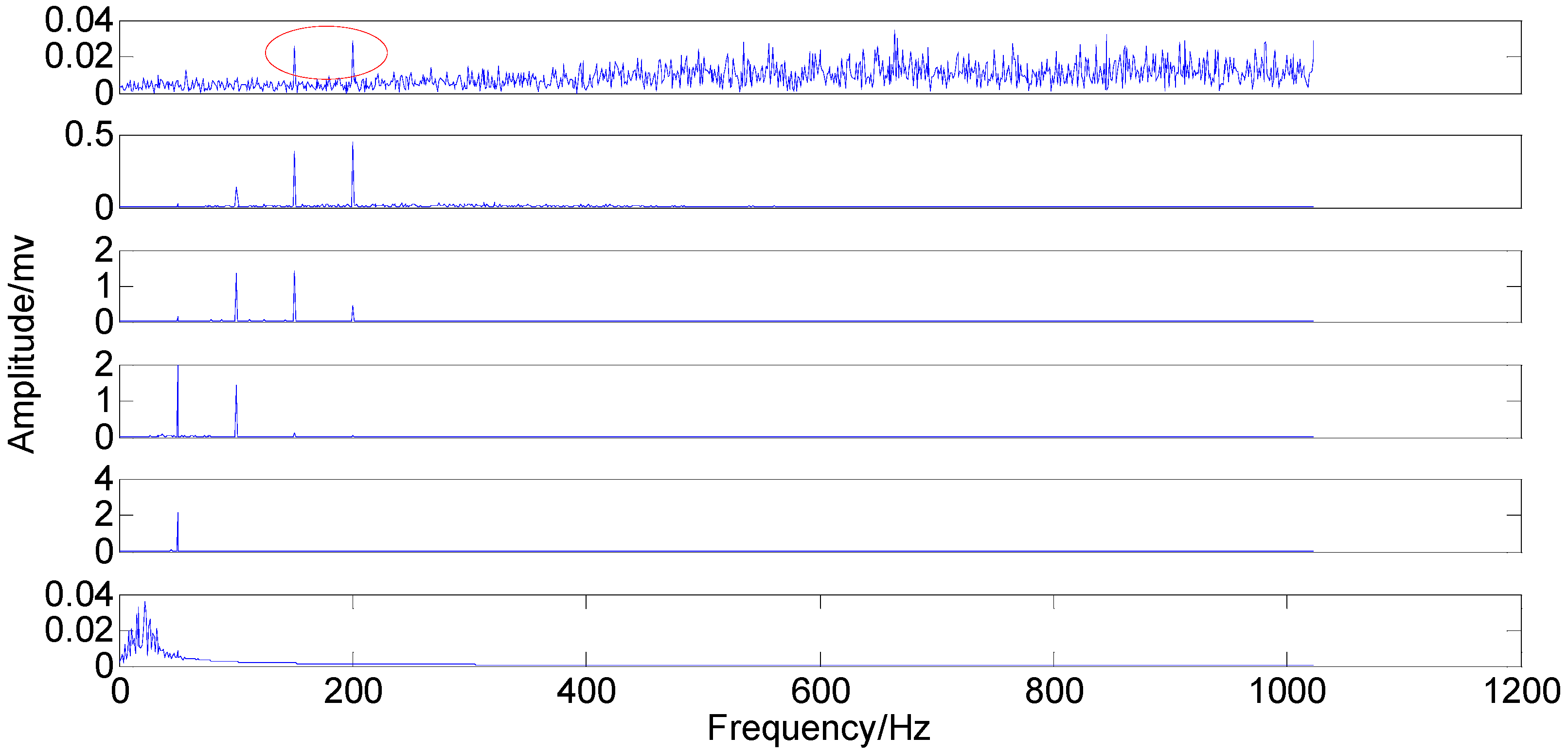
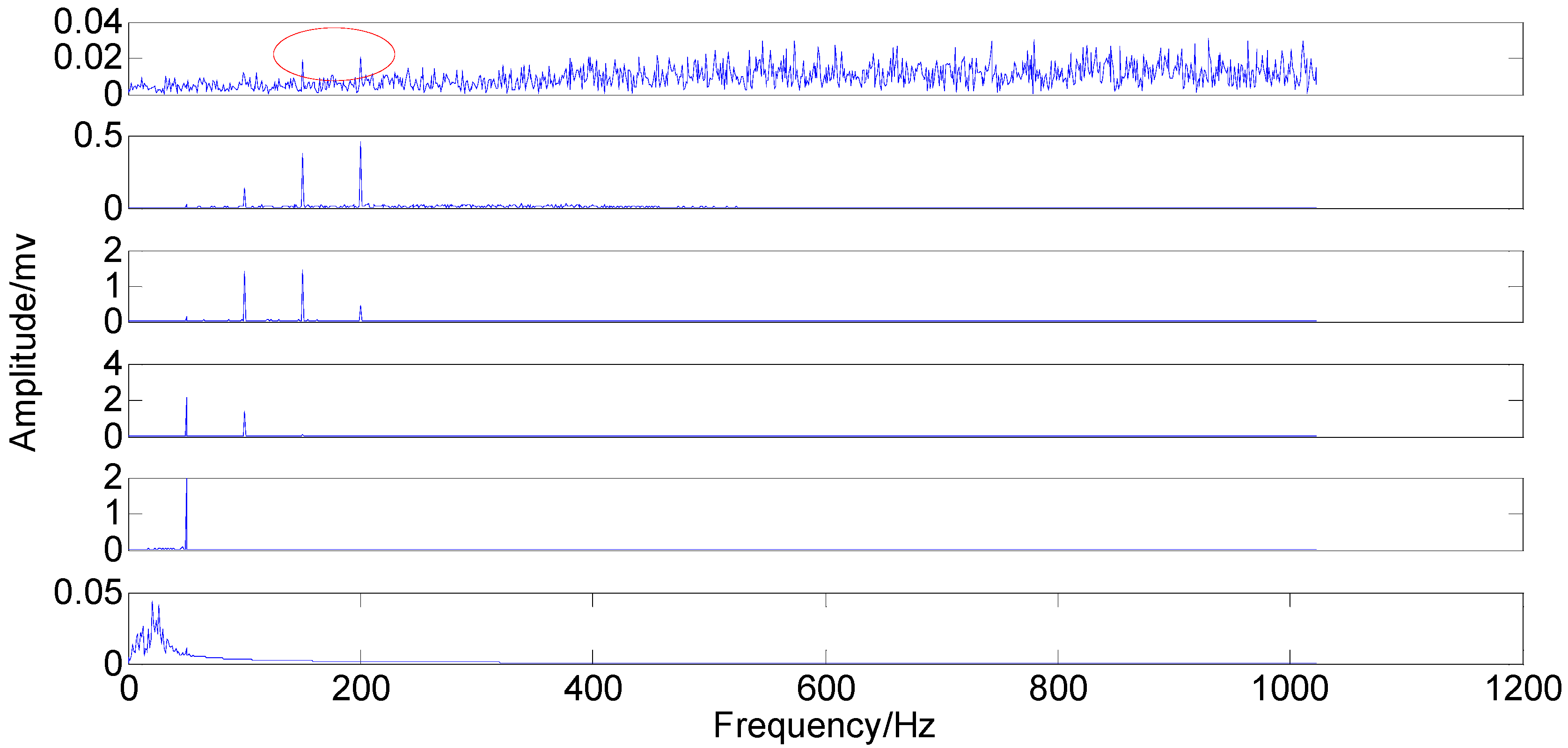
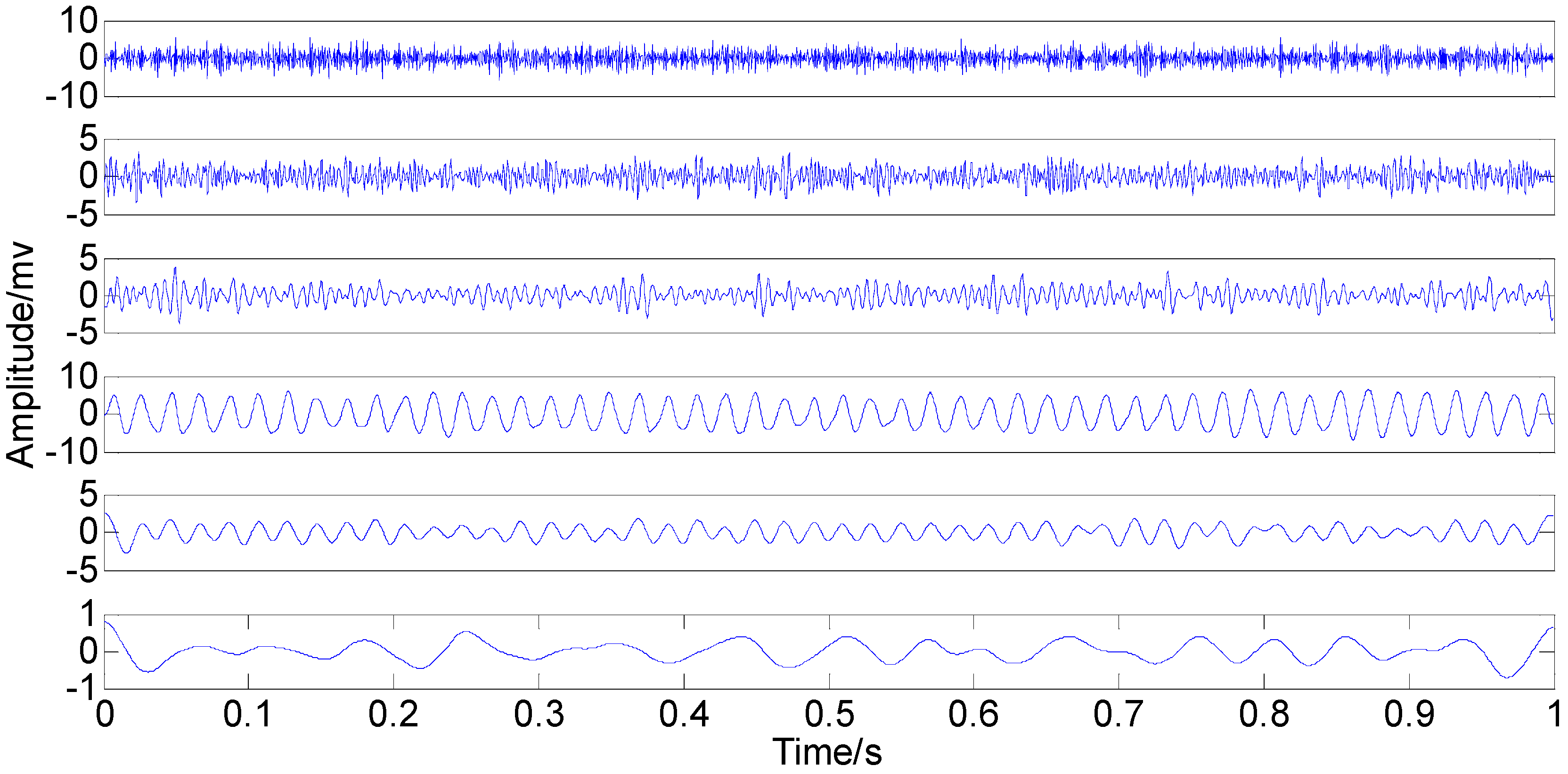
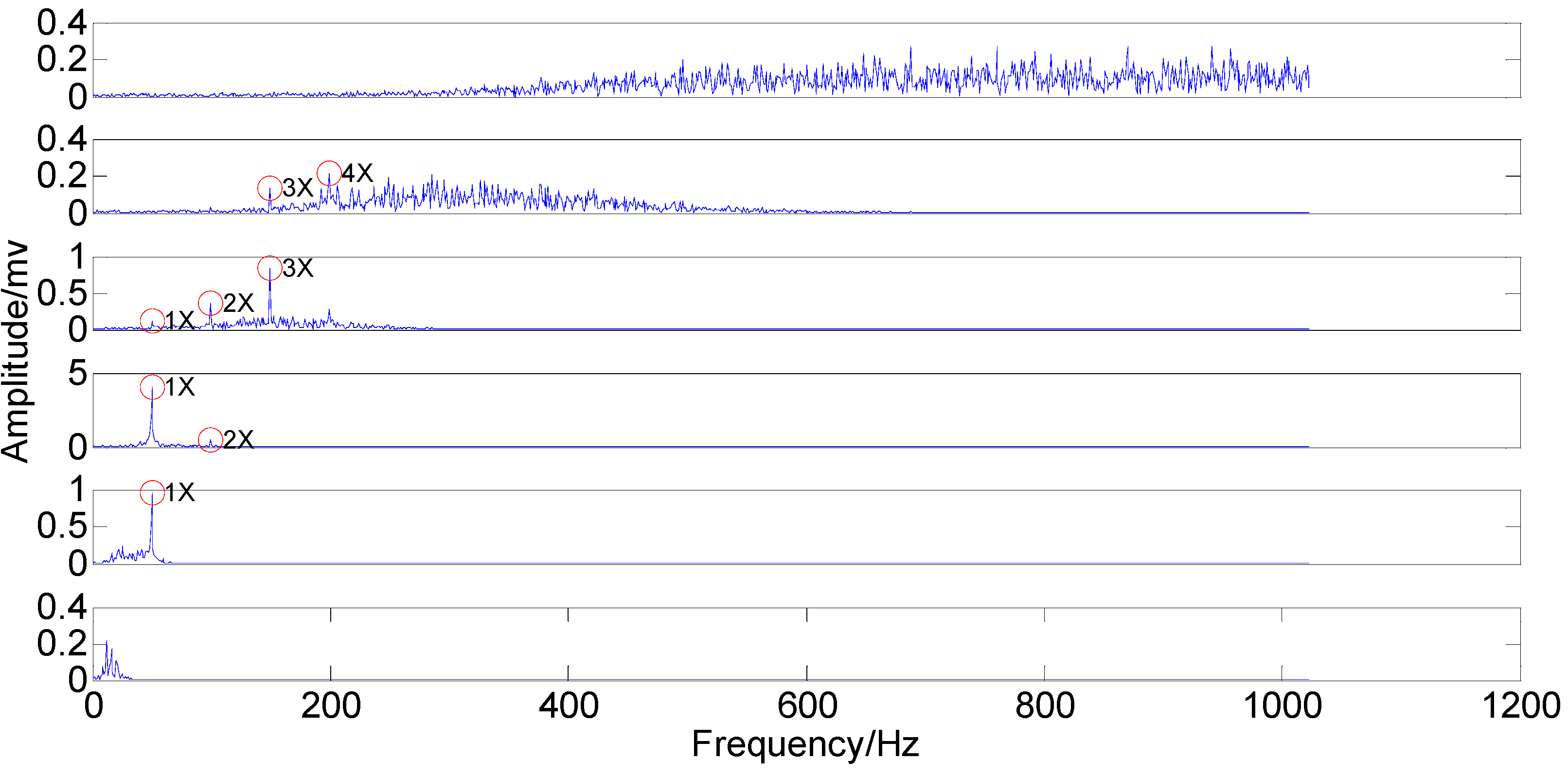
4.2. Rubbing Features Extraction with PSEEMD

5. Conclusions
- Style mixing can be eliminated.
- The change in the amplitude of added noise is robust.
- The weak features can be extracted independently.
- The advantages of (1)–(3) are realized under the condition of suffering from strong noise.
- PSEEMD may have the generalization capability. It is expected to apply PSEEMD in analyzing non-linear and non-stationary signals in other fields.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Braun, S. The synchronous (time domain) average revisited. Mech. Syst. Signal Process. 2011, 25, 1087–1102. [Google Scholar] [CrossRef]
- Qu, L.S.; Chen, Y.D.; Liu, X. The holospectrum—A new method for rotor surveillance and diagnosis. Mech. Syst. Signal Process. 1989, 3, 255–267. [Google Scholar] [CrossRef]
- Peng, Z.K.; Tse, P.W.; Chu, F.L. An improved Hilbert-Huang transform and its application in vibration signal analysis. J. Sound Vib. 2005, 286, 187–205. [Google Scholar] [CrossRef]
- Li, Q.; Wang, T.Y; Leng, Y.G.; Wang, W.; Wang, G.F. Engineering signal processing based on adaptive step-changed stochastic resonance. Mech. Syst. Signal Process. 2007, 21, 2267–2279. [Google Scholar] [CrossRef]
- Antoni, J. Cyclostationarity by examples. Mech. Syst. Signal Process. 2009, 23, 987–1036. [Google Scholar] [CrossRef]
- Peng, F.; Yu, D.; Luo, J. Sparse signal decomposition method based on multi-scale chirplet and its application to the fault diagnosis of gearboxes. Mech. Syst. Signal Process. 2011, 25, 549–557. [Google Scholar] [CrossRef]
- Cheng, W.; Lee, S.; Zhang, Z.S.; He, Z.J. Independent component analysis based source number estimation and its comparison for mechanical systems. J. Sound Vib. 2012, 331, 5153–5167. [Google Scholar] [CrossRef]
- Randall, R.B. Vibration-Based Condition Monitoring: Industrial, Automotive and Aerospace Applications; Wiely: New Jersey, NJ, USA, 2011. [Google Scholar]
- He, Z.J.; Yuan, J.; Zi, Y.Y. Principle of Inner Product Transformation and Its Application in Mechanical Fault Diagnosis; Science Press: Beijing, China, 2012. [Google Scholar]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for non-linear and non stationary time series analysis. Proc. R. Soc. Lond. A 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Yu, D.J.; Cheng, J.S.; Yang, Y. Application of EMD method and Hilbert spectrum to the fault diagnosis of roller bearings. Mech. Syst. Signal Process. 2005, 19, 259–270. [Google Scholar] [CrossRef]
- Gai, G.H. The processing of rotor startup signals based on empirical mode decomposition. Mech. Syst. Signal Process. 2006, 20, 222–235. [Google Scholar] [CrossRef]
- Yan, R.; Gao, R.X. Rotary machine health diagnosis based on empirical mode decomposition. J. Vib. Acoust. 2008, 130. [Google Scholar] [CrossRef]
- Tsakalozos, N.; Drakakis, K.; Rickard, S. A formal study of the non-linearity and consistency of the empirical mode decomposition. Signal Process. 2011, 92, 1961–1969. [Google Scholar] [CrossRef]
- He, Q.; Li, P.; Kong, F. Rolling bearing localized defect evaluation by multiscale signature via empirical mode decomposition. J. Vib. Acoust. 2012, 134. [Google Scholar] [CrossRef]
- Huang, N.E. A new view of non-linear waves: The Hilbert spectrum. Annu. Rev. Fluid. Mech. 1999, 31, 417–457. [Google Scholar] [CrossRef]
- Rato, R.T.; Ortigueira, M.D.; Batista, A.G. On the HHT, its problems, and some solutions. Mech. Syst. Signal Process. 2008, 22, 1374–1394. [Google Scholar] [CrossRef]
- Wu, Z.H.; Huang, N.E. Ensemble empirical mode decomposition: A noise assisted data analysis method. Adv. Adap. Data. Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Lei, Y.G.; He, Z.J.; Zi, Y.Y. Application of the EEMD method to rotor fault diagnosis of rotating machinery. Mech. Syst. Signal Process. 2009, 23, 1327–1338. [Google Scholar] [CrossRef]
- Yu, Y.; Lang, H.H. Fault Diagnosis of Rotor Rub based on Ensemble EMD. In Proceedings of the 9th International Conference on Electronic Measurement & Instruments, ICEMI ‘09. Beijing, China, 16–19 August; 2009; pp. 2-144–2-148. [Google Scholar]
- Lei, Y.G.; Li, N.P.; Lin, J.; Wang, S.Z. Fault Diagnosis of Rotating Machinery Based on an Adaptive Ensemble Empirical Mode Decomposition. Sensors 2013, 13, 16950–16964. [Google Scholar] [CrossRef] [PubMed]
- Packard, N.H.; Crutchfield, J.P.; Farmer, J.D. Geometry from Time Series. Phys. Rev. Lett. 1980, 47, 712–716. [Google Scholar] [CrossRef]
- Takens, F. Determing Strange Attractors in Turbulence. Lect. Notes. Math. 1981, 898, 361–381. [Google Scholar]
- Gibson, J.F.; Farmer, J.; Casdagli, M. An analytic approach to practical state space reconstruction. Phys. D Nonlinear Phenom. 1992, 57, 1–30. [Google Scholar] [CrossRef]
- Casdagli, M.; Sauer, T.; Yorke, C.M. Embedology. J. Stat. Phys. 1991, 65, 579–616. [Google Scholar] [CrossRef]
- Kennel, M.B.; Brown, R.; Abarbanel, H.D.I. Determining embedding dimension for phase-space reconstruction using a geometrical construction. Phys. Rev. A 1992, 45, 3403–3411. [Google Scholar] [CrossRef] [PubMed]
- Cao, L.Y. Practical method for determining the minimum embedding dimension of a scalar time series. Phys. D Nonlinear Phenom. 1997, 110, 43–50. [Google Scholar] [CrossRef]
- Vautard, R.; Yiou, P.; Ghil, M. Singular Spectrum Analysis: A Toolkit for Short, Noisy Chaotic Signals. Phys. D Nonlinear Phenom. 1992, 58, 95–126. [Google Scholar] [CrossRef]
- Lei, M.; Wang, Z.Z.; Feng, Z.J. A method of embedding dimension estimation based on symplectic geometry. Phys. Lett. A 1994, 303, 179–189. [Google Scholar] [CrossRef]
- Fraser, A.M.; Swinney, H.I. Independent coordinates for strange attractors from mutual information. Phys. Rev. A 1986, 33, 1134–1140. [Google Scholar] [CrossRef] [PubMed]
- Rosenstein, M.T.; Collins, J.J.; de Luca, C.J. Reconstruction expansion as a geometry-based framework for choosing proper delay times. Phys. D Nonlinear Phenom. 1994, 73, 82–98. [Google Scholar] [CrossRef]
- Seung, H.S.; Lee, D.D. The manifold ways of perception. Science 2000, 290, 2268–2269. [Google Scholar] [CrossRef] [PubMed]
- Kwak, D.H.; Lee, D.D.; Ahn, J.H.; Koh, B.H. Fault detection of roller-bearings using signal processing and optimization algorithms. Sensors 2014, 14, 283–298. [Google Scholar] [CrossRef]
- Razi, P.; Taheri, F. A vibration-based strategy for health monitoring of offshore pipelines’ girth-welds. Sensors 2014, 14, 17174–17191. [Google Scholar] [CrossRef] [PubMed]
- Ahn, J.H.; Kwak, D.H.; Koh, B.H. Fault Detection of a roller bearing system through the EMD of a wavelet denoised signal. Sensors 2014, 14, 15022–15038. [Google Scholar] [CrossRef] [PubMed]
- Flandrin, P.; Rilling, G.; Goncalves, P. Empirical mode decomposition as a filter bank. IEEE Signal Process. Lett. 2004, 11, 112–114. [Google Scholar] [CrossRef]
- Marcelo, A.C.; Gaston, S.; Maria, E.T. Improved complete ensemble EMD: A suitable tool for Biomed. Signal Proces. 2014; 14, 19–29. [Google Scholar]
- He, Q.B.; Wang, X.X.; Zhou, Q. Vibration sensor data denoising using a time-frequency manifold for machinery fault diagnosis. Sensors 2014, 14, 382–402. [Google Scholar] [CrossRef]
- Liang, Y.C.; Lee, H.P.; Lim, S.P. Proper orthogonal decomposition and its application-Part I: Thcorv. J. Sound Vib. 2002, 252, 527–544. [Google Scholar] [CrossRef]
- Broomhead, D.S.; King, G.P. Extracting qualitative dynamics from experimental data. Phys. D Nonlinear Phenom. 1986, 20, 217–236. [Google Scholar] [CrossRef]
- FuKunaga, K. Introduction to Statistical Pattern Recognition; Academic Press: New York, NY, USA, 1990. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Z.; Wen, G.; Jiang, C. EEMD Independent Extraction for Mixing Features of Rotating Machinery Reconstructed in Phase Space. Sensors 2015, 15, 8550-8569. https://doi.org/10.3390/s150408550
Ma Z, Wen G, Jiang C. EEMD Independent Extraction for Mixing Features of Rotating Machinery Reconstructed in Phase Space. Sensors. 2015; 15(4):8550-8569. https://doi.org/10.3390/s150408550
Chicago/Turabian StyleMa, Zaichao, Guangrui Wen, and Cheng Jiang. 2015. "EEMD Independent Extraction for Mixing Features of Rotating Machinery Reconstructed in Phase Space" Sensors 15, no. 4: 8550-8569. https://doi.org/10.3390/s150408550