
A Noncontact FMCW Radar Sensor for Displacement Measurement in Structural Health Monitoring

Abstract
:1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
2. Description of Displacement Measurement in SHM
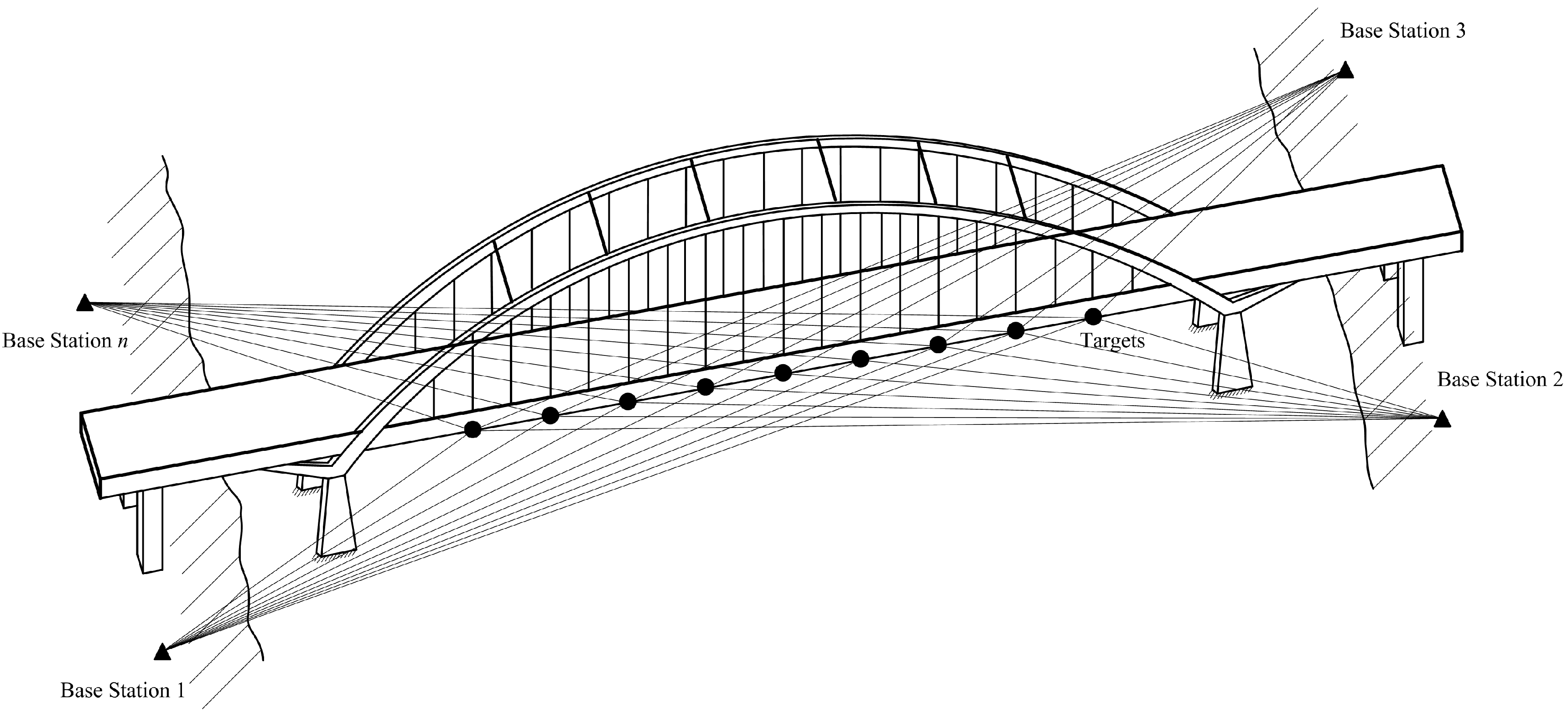
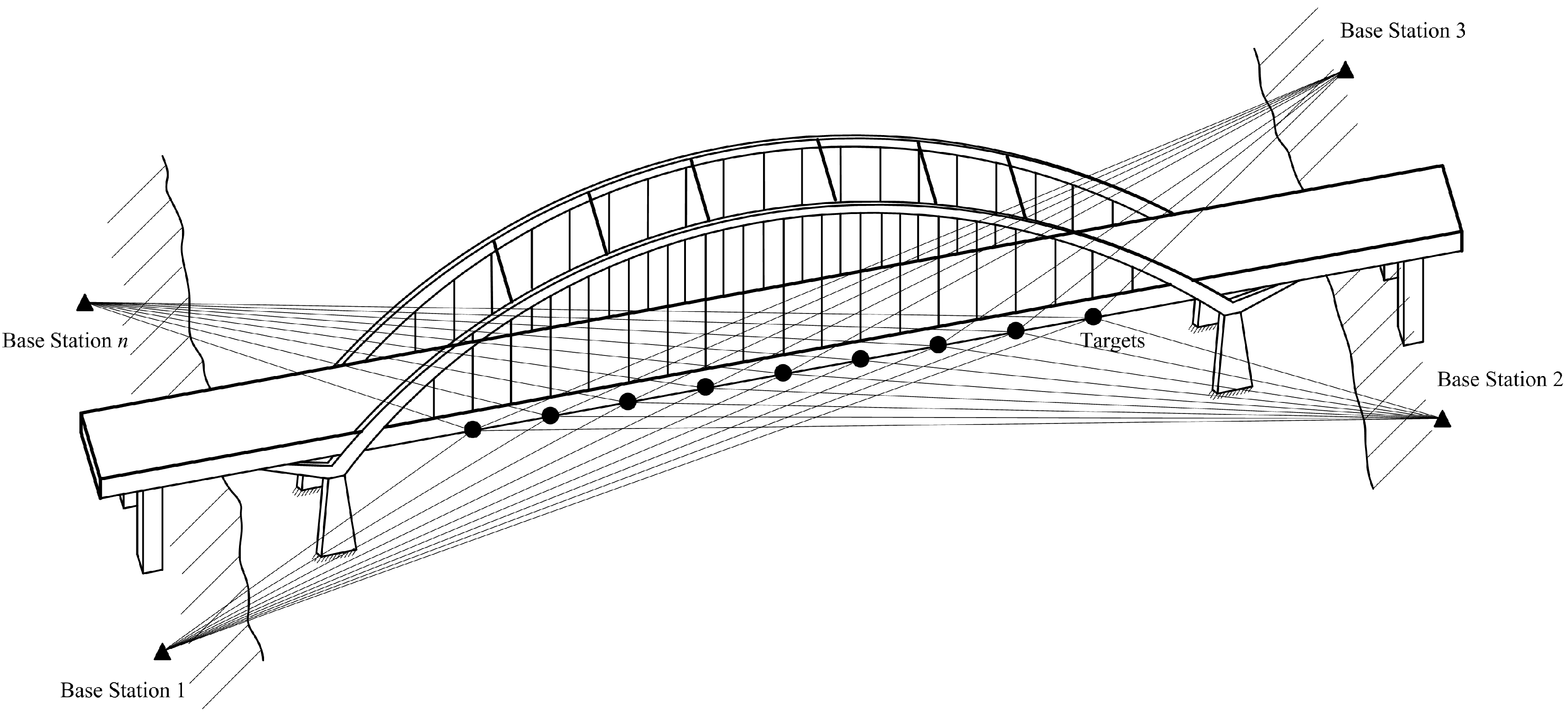
2.1. Description of Displacement Measurement in a Large Infrastructure
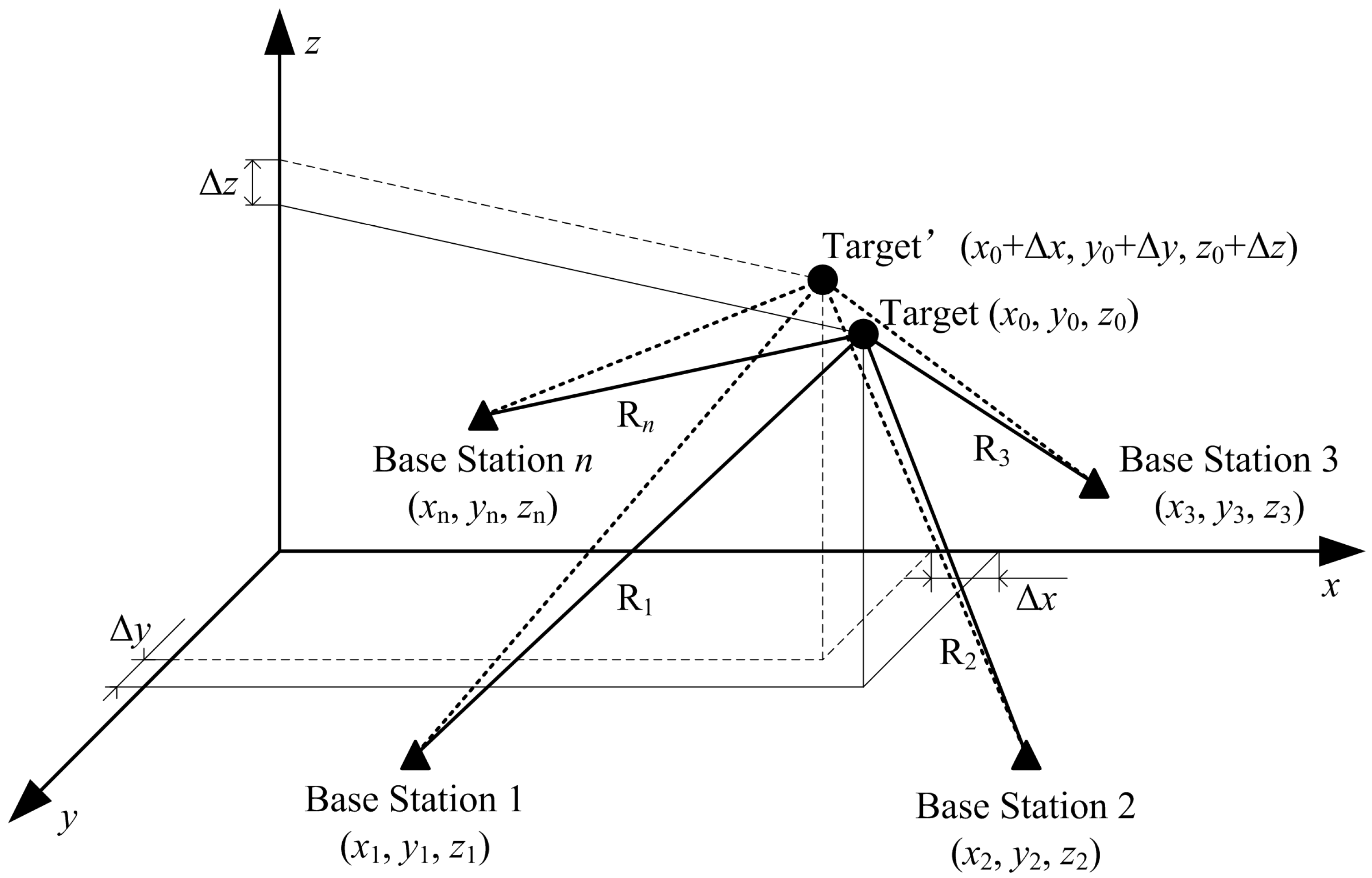
2.2. 3-D Displacement Measuring Principle of Single Target

3. FMCW Radar Sensor for Displacement Measurement of Single Target
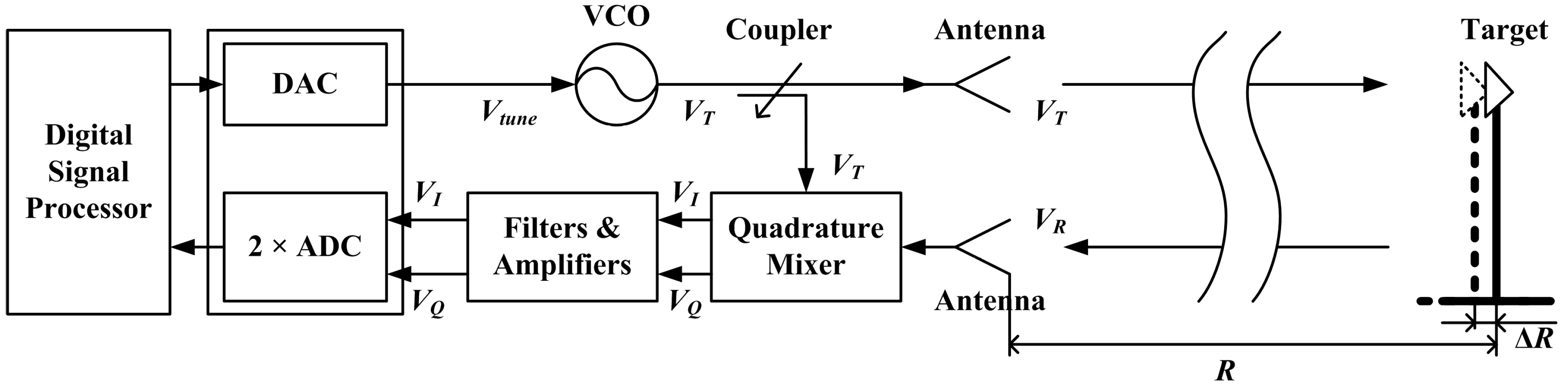
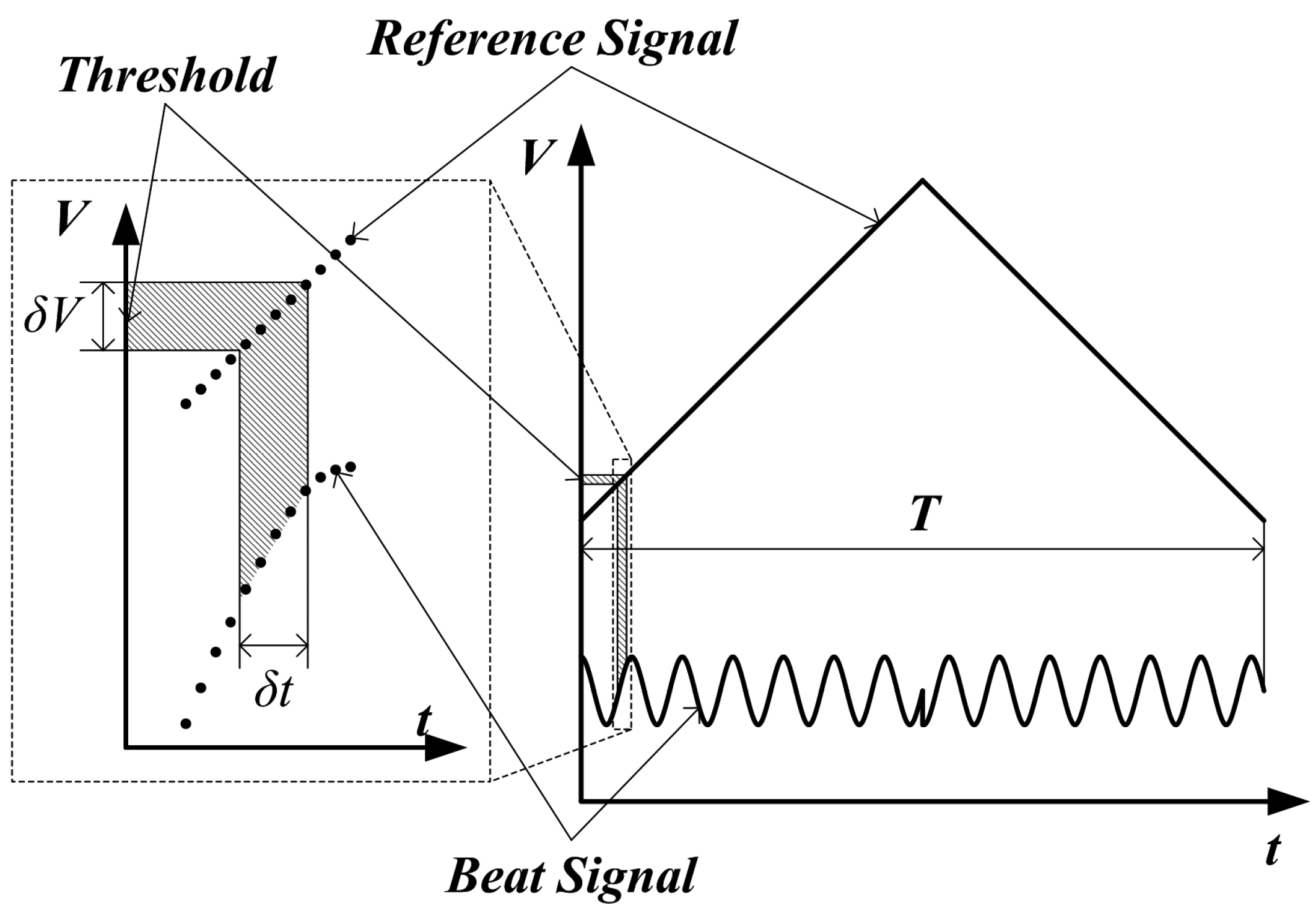
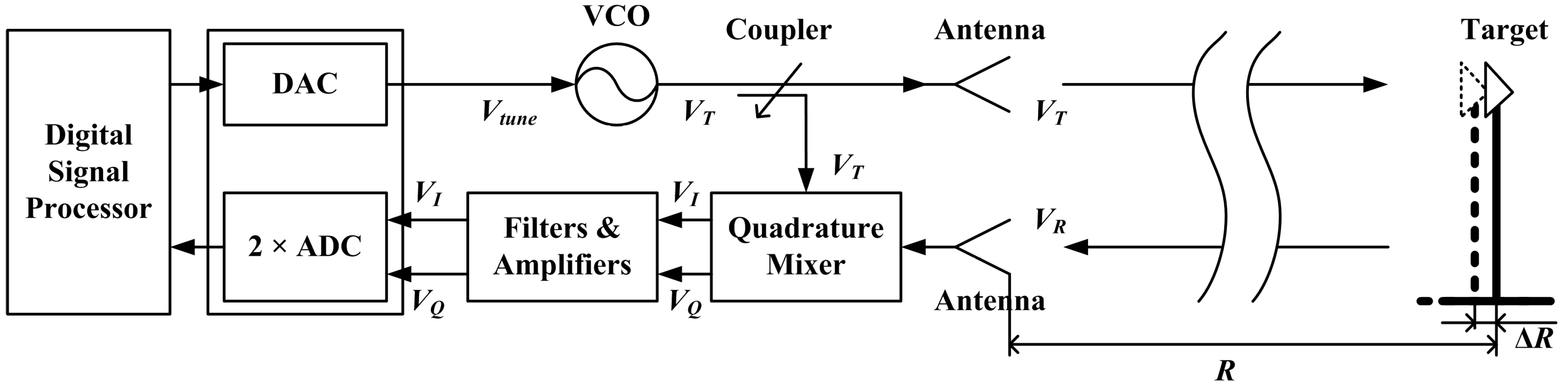
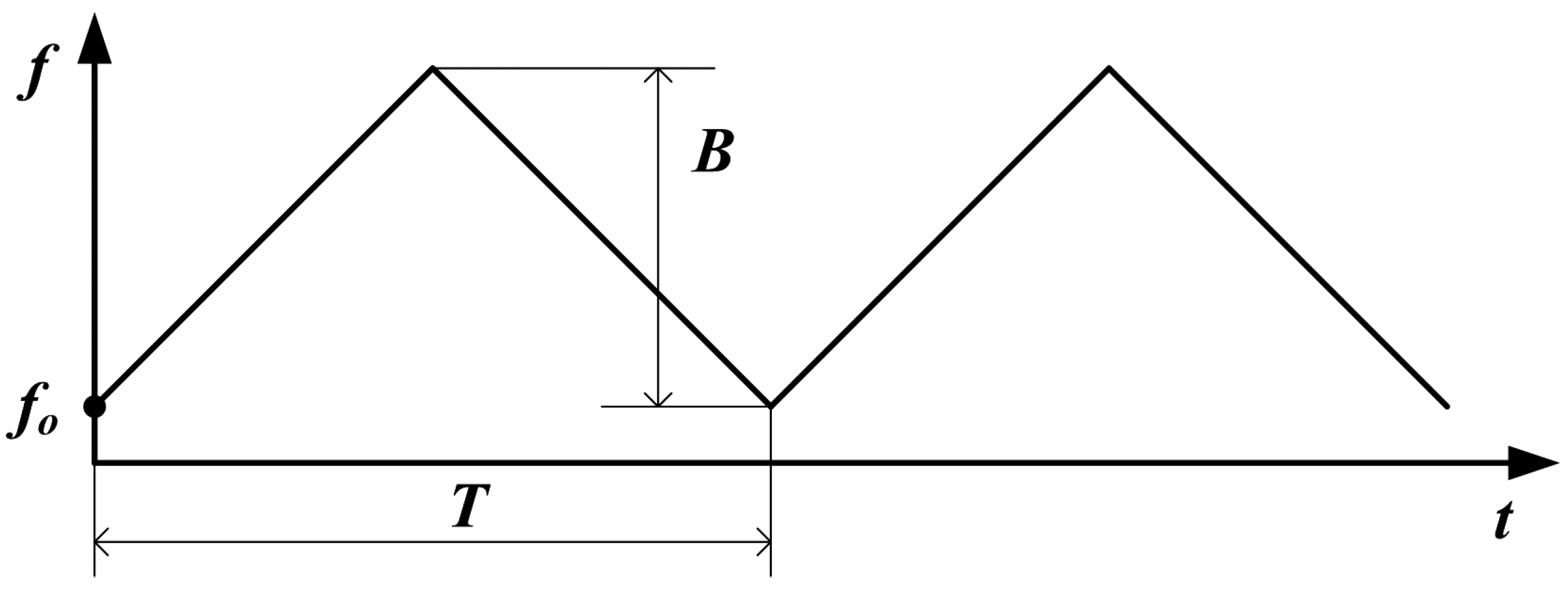
3.1. Signal Propagation of FMCW Radar
3.2. Displacement Measurement of Single Target
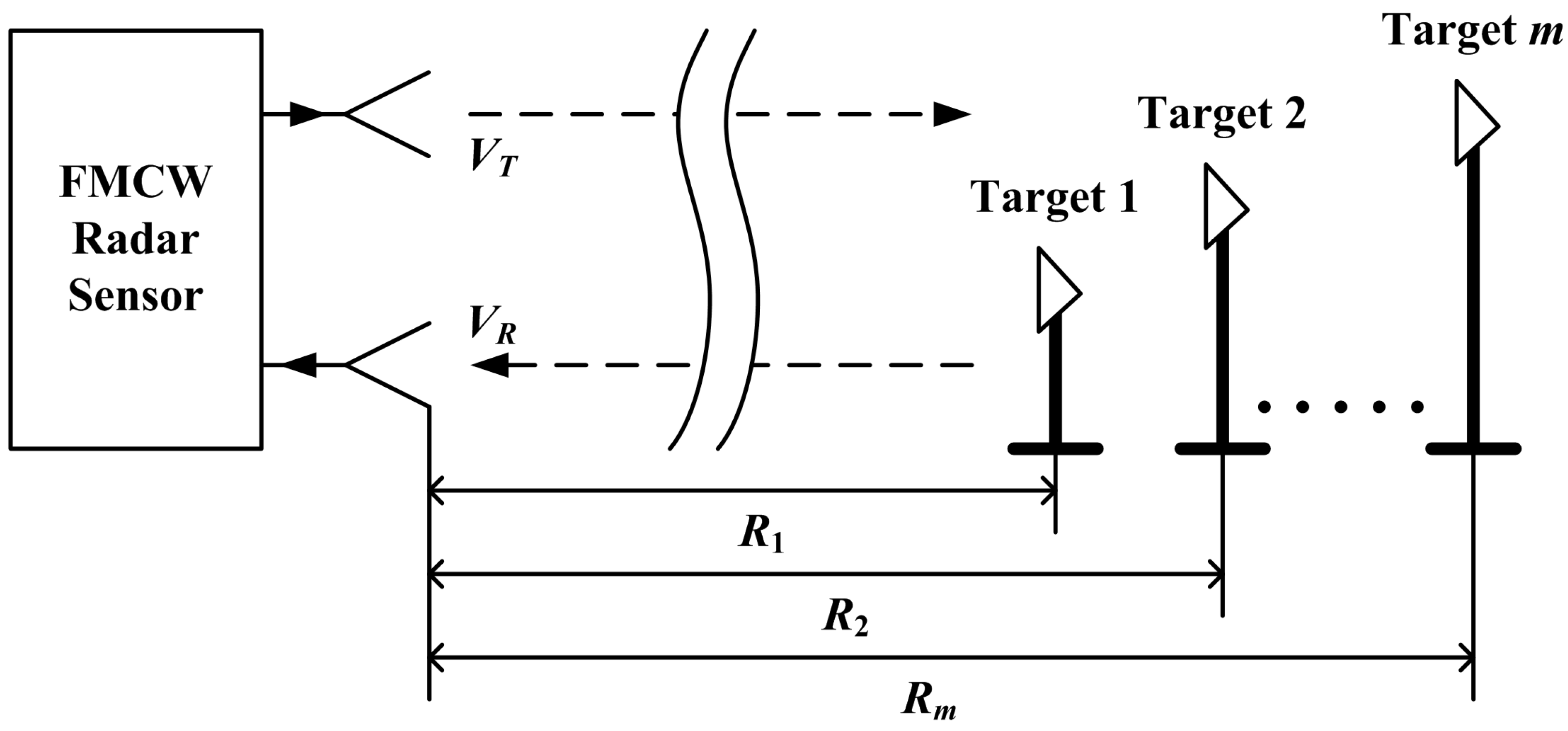
4. Displacement Measurement of Multiple Targets
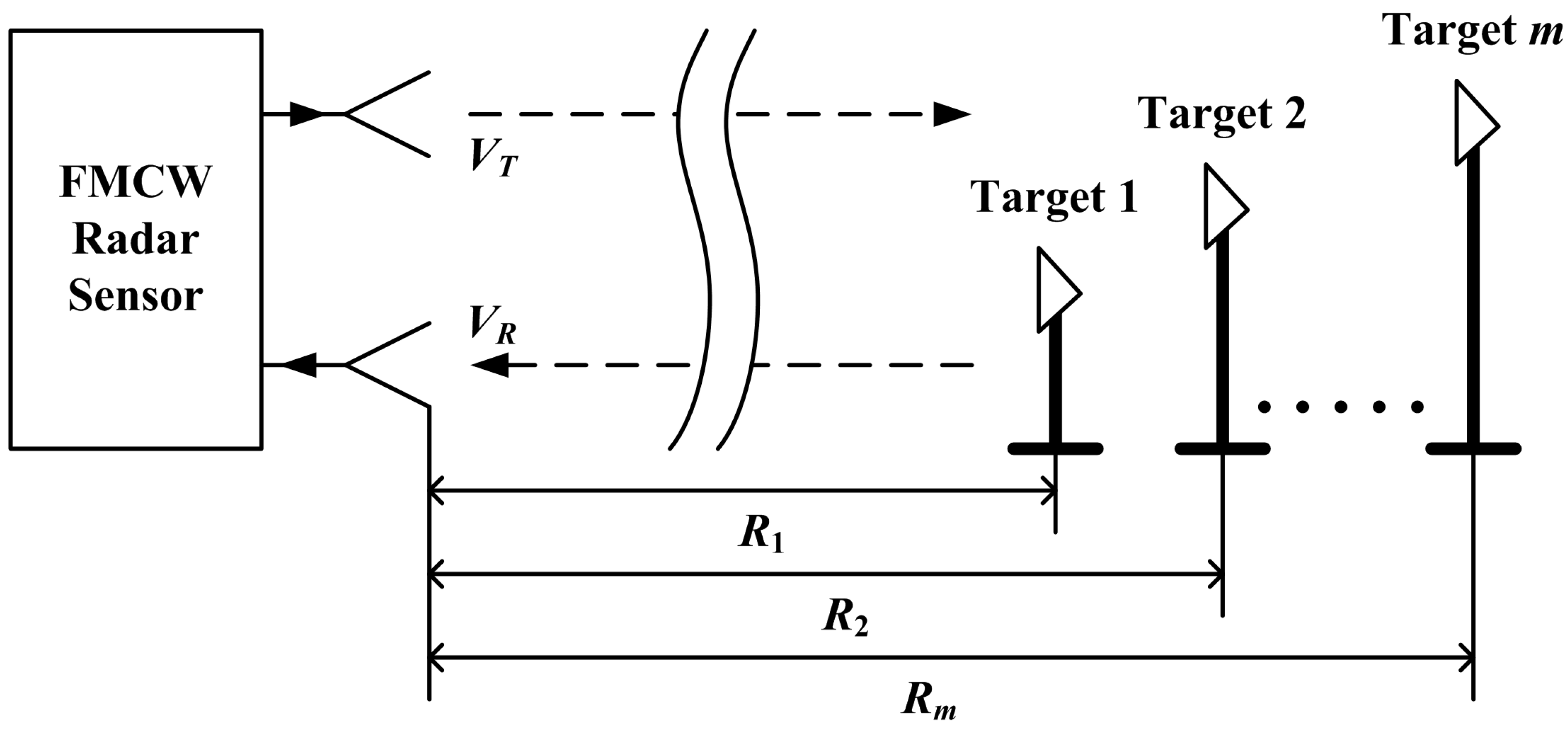
4.1. Measurement Principle of Multiple Targets
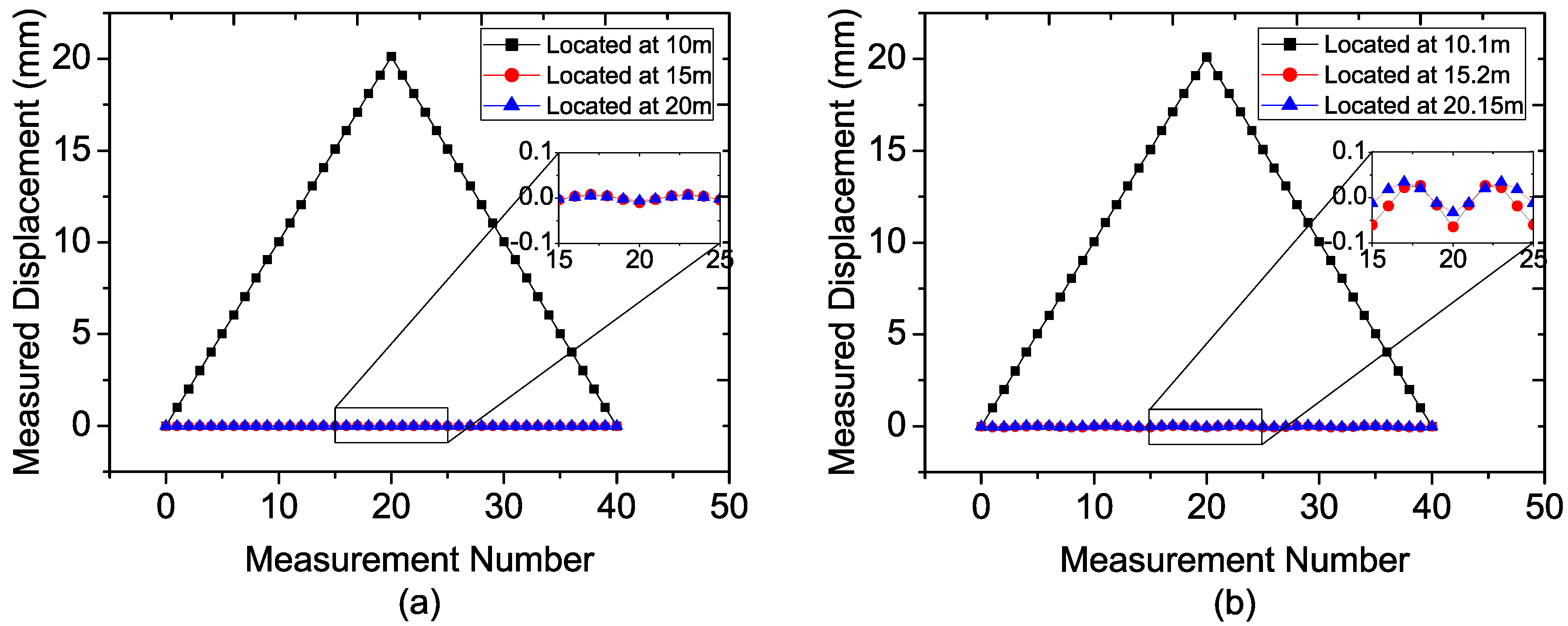
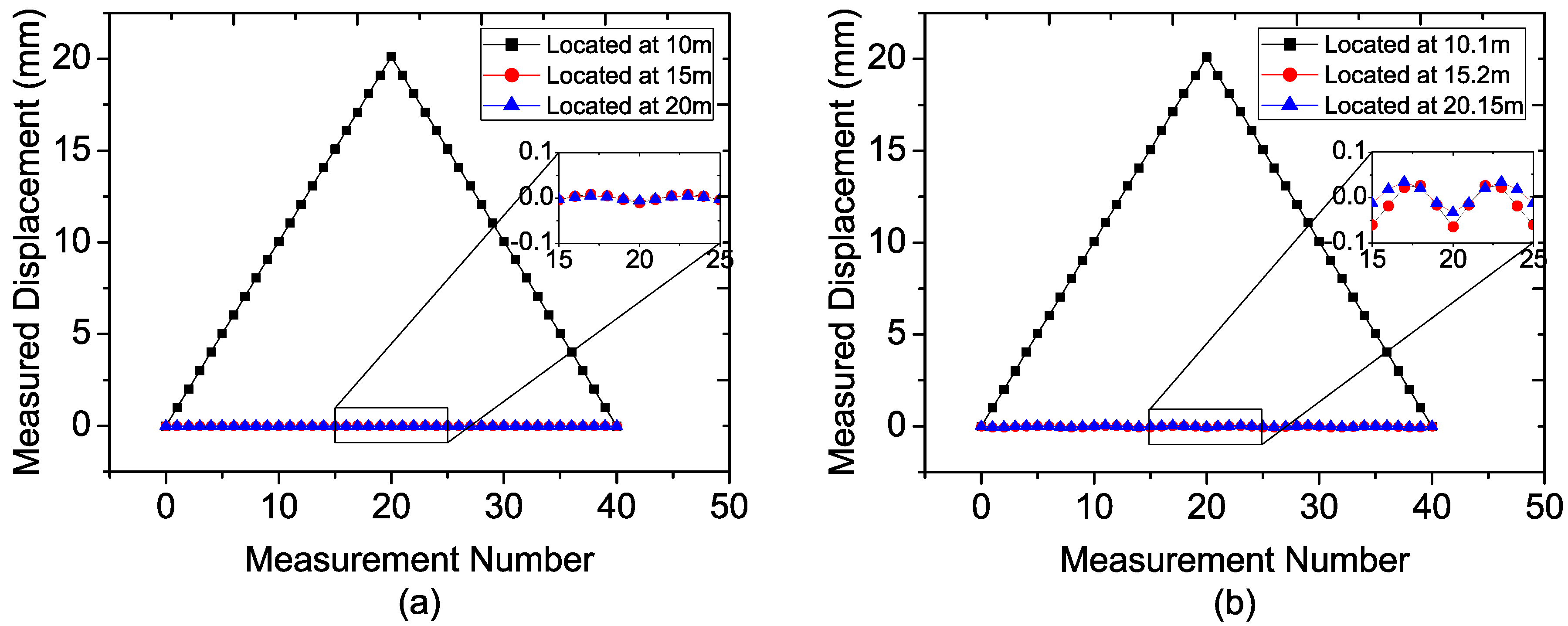
4.2. Simulation Analysis of Displacement Measurement of Multiple Targets
| Parameters | Initial Frequency fo | Bandwidth B | Period of Triangle Wave T | Sampling Rate fs |
|---|---|---|---|---|
| Value | 24 GHz | 300 MHz | 0.01 s | 200 kHz |
| Target 1 | Target 2 | Target 3 | ||
|---|---|---|---|---|
| Case 1 | 10 m | 15 m | 20 m | |
| Case 2 | 10.1 m | 15.2 m | 20.15 m | |
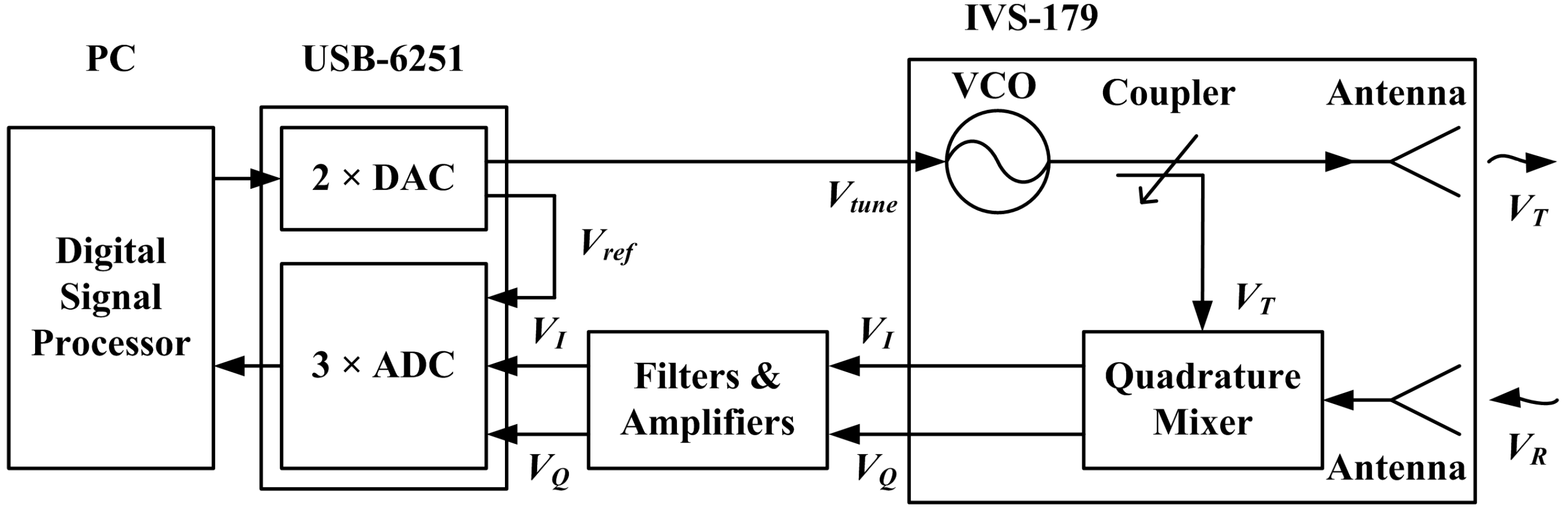
5. Prototype of a FMCW Radar Sensor
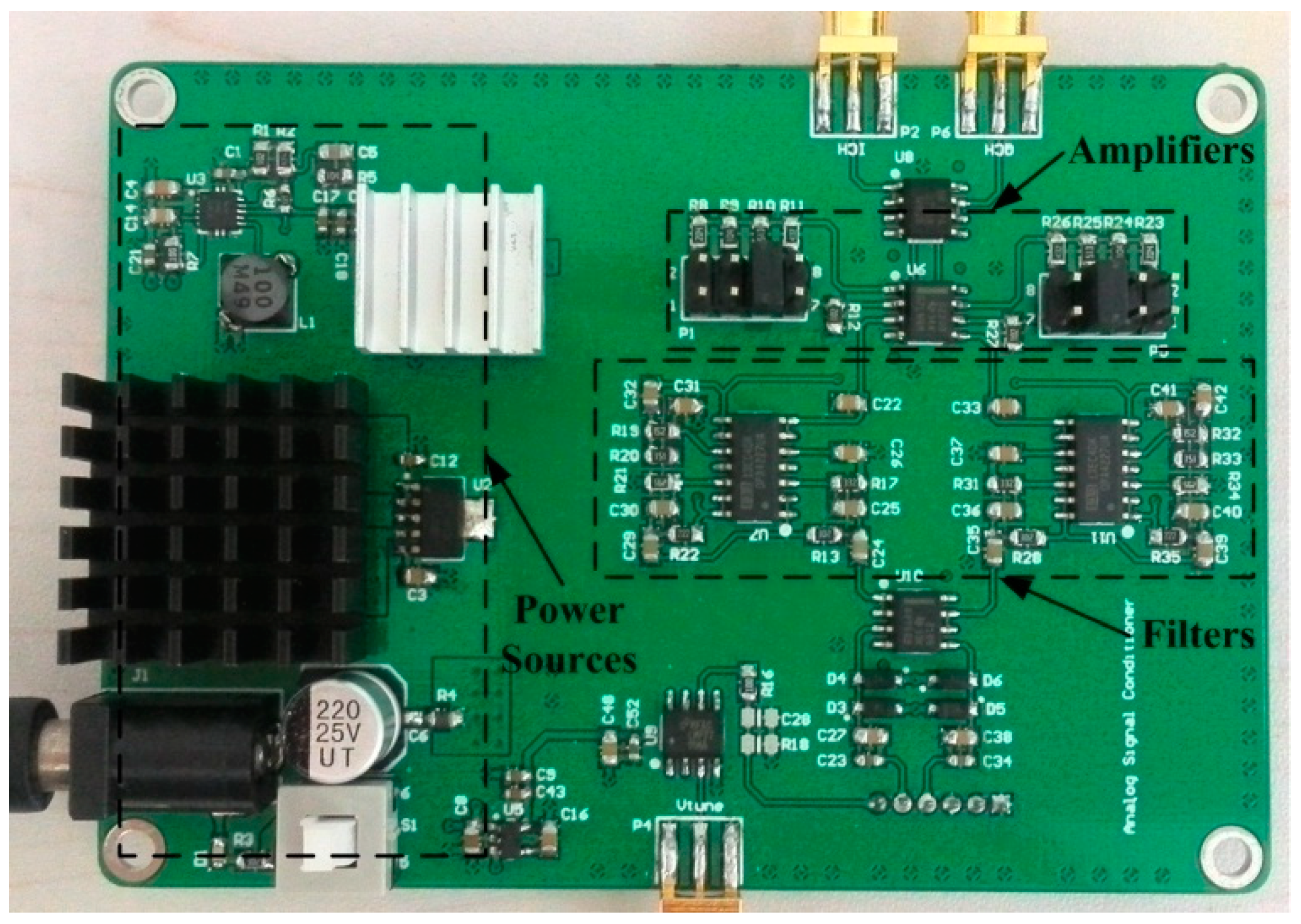
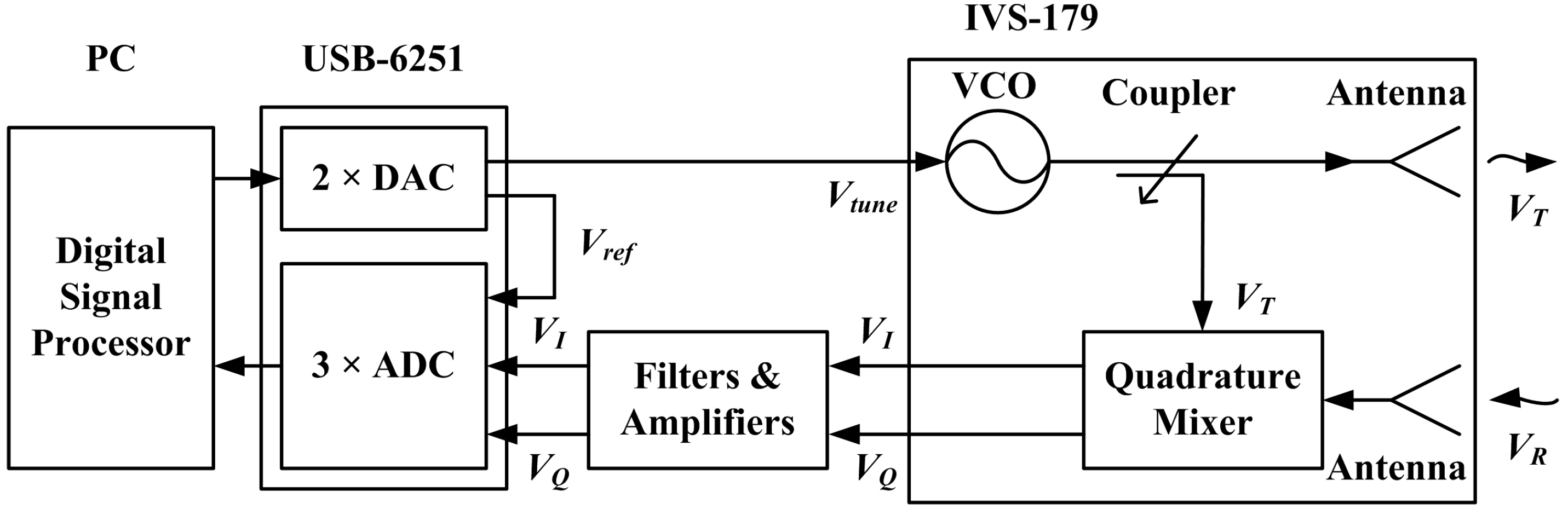
5.1. Main Components of the Radar
| Sample Rate | Buffer Size | ||
|---|---|---|---|
| DAC | 400 kHz | 4000 | |
| ADC | 200 kHz | 4000 | |
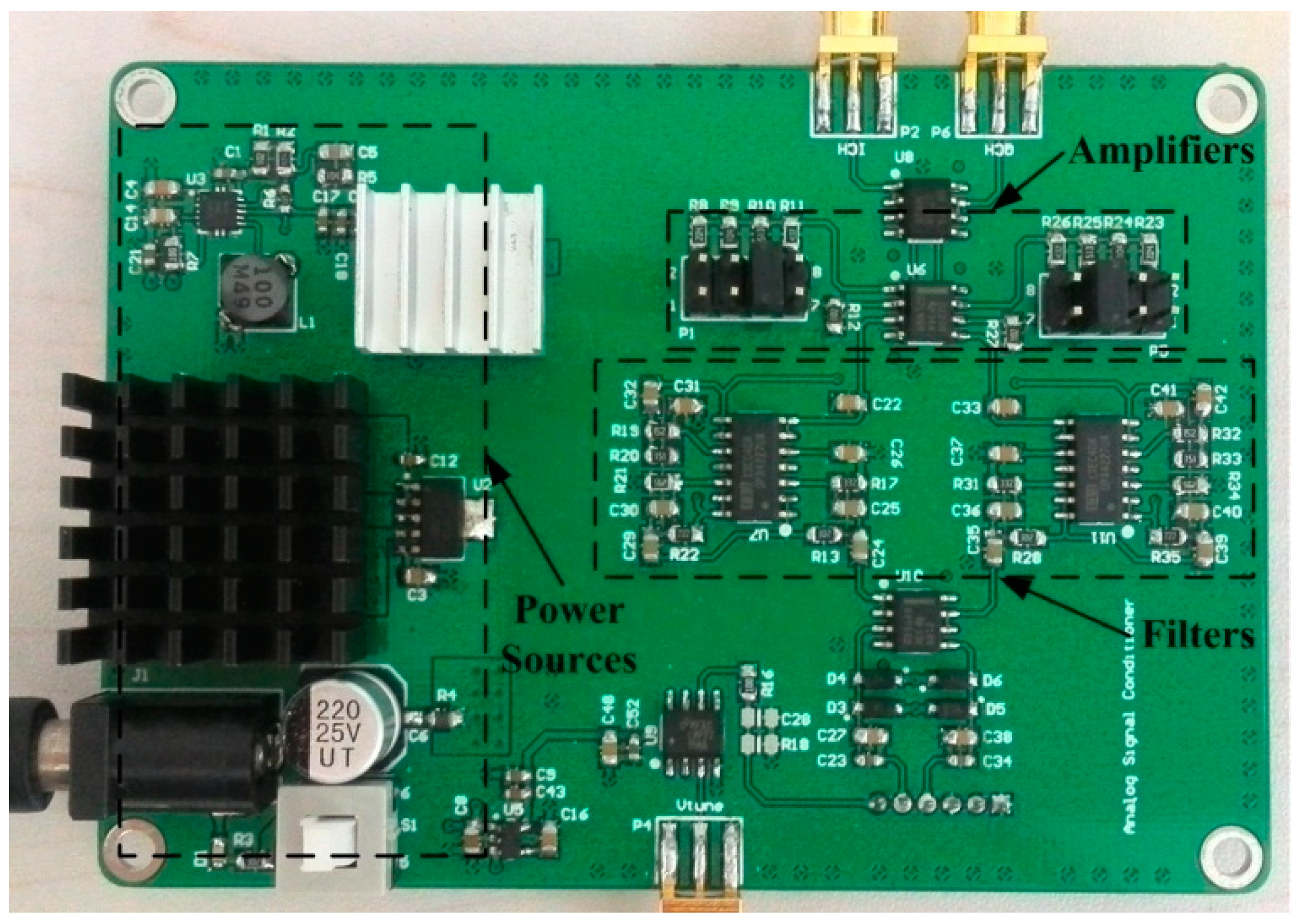
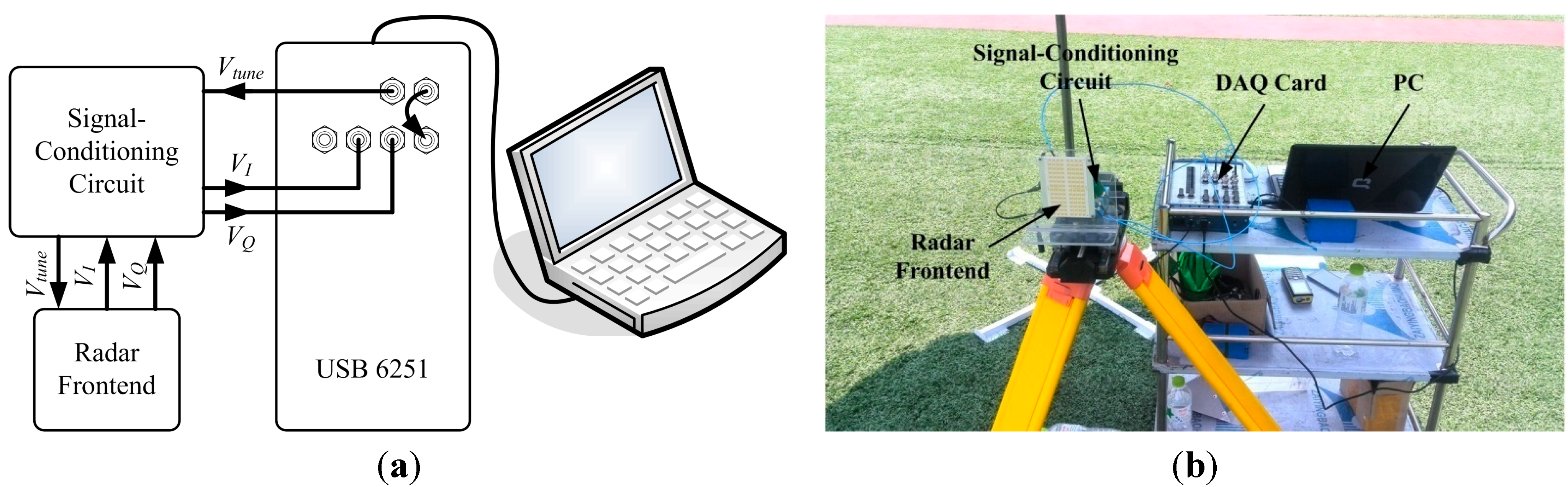
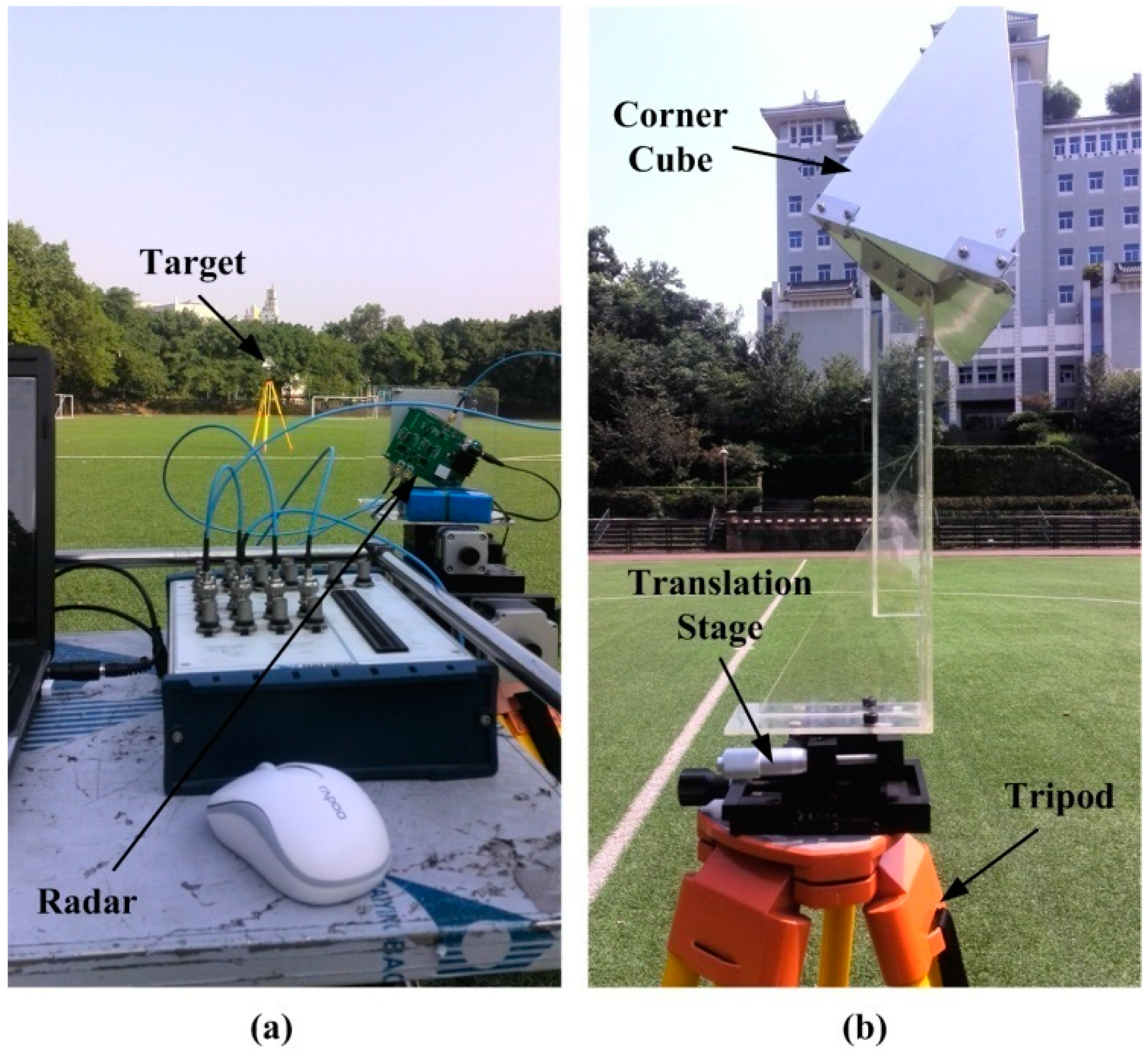
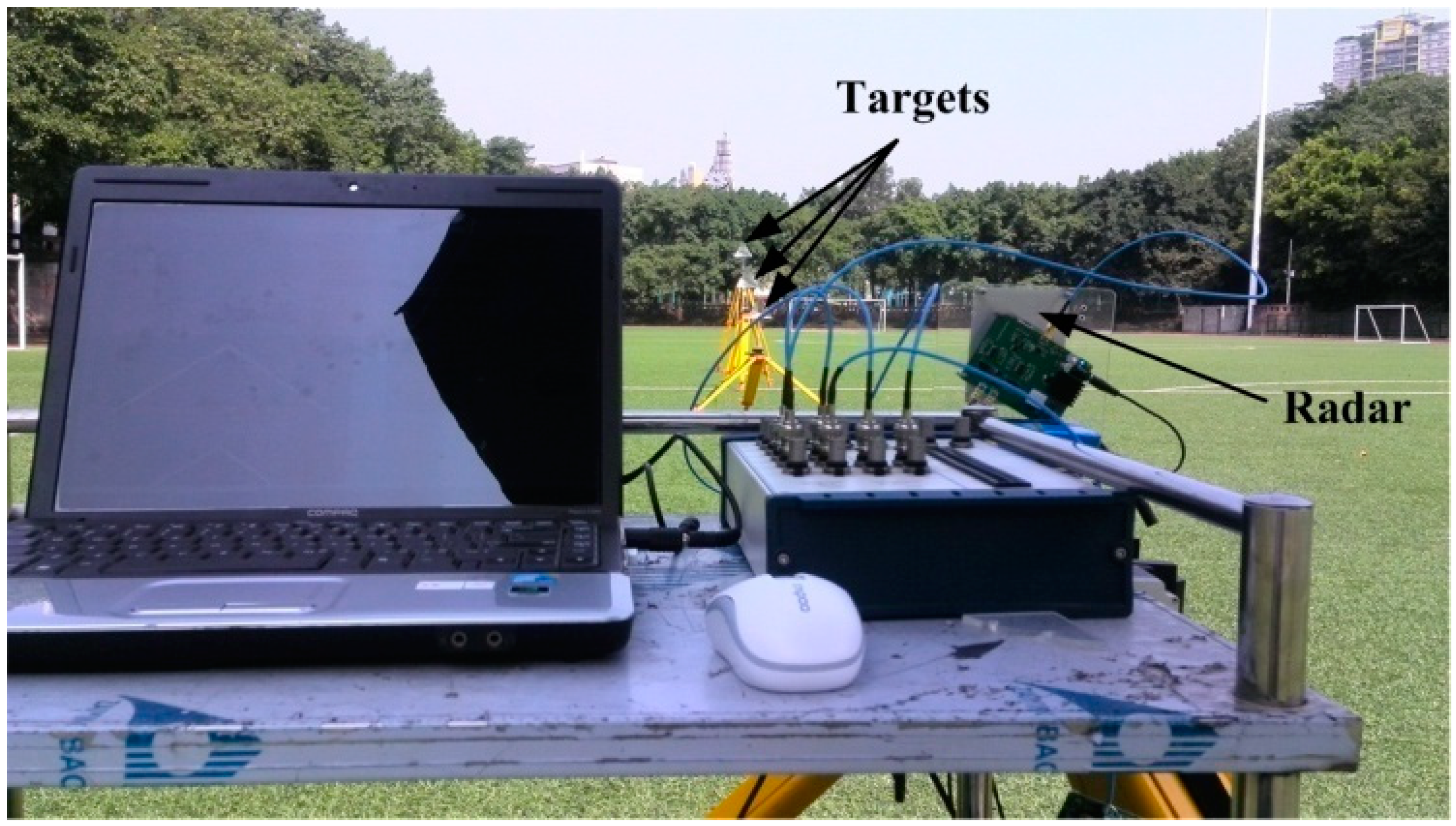
5.2. Actual Prototype Architecture


6. Experiment and Discussion
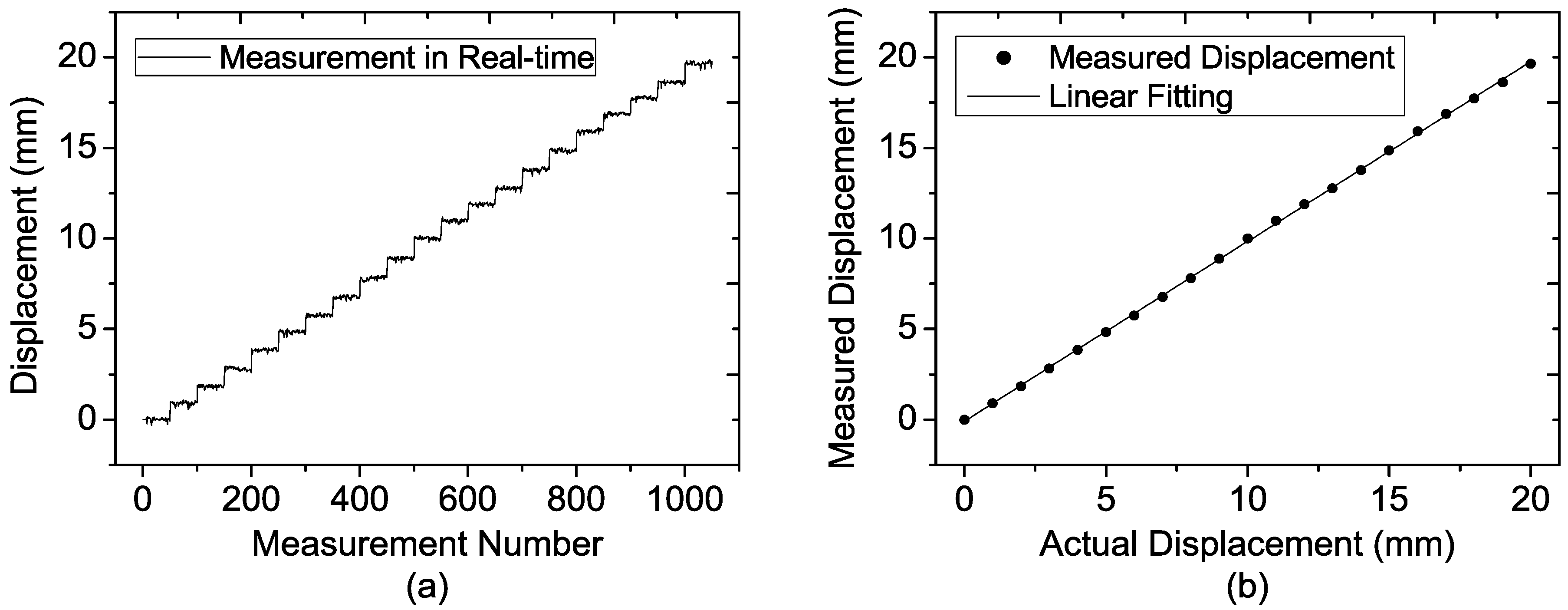
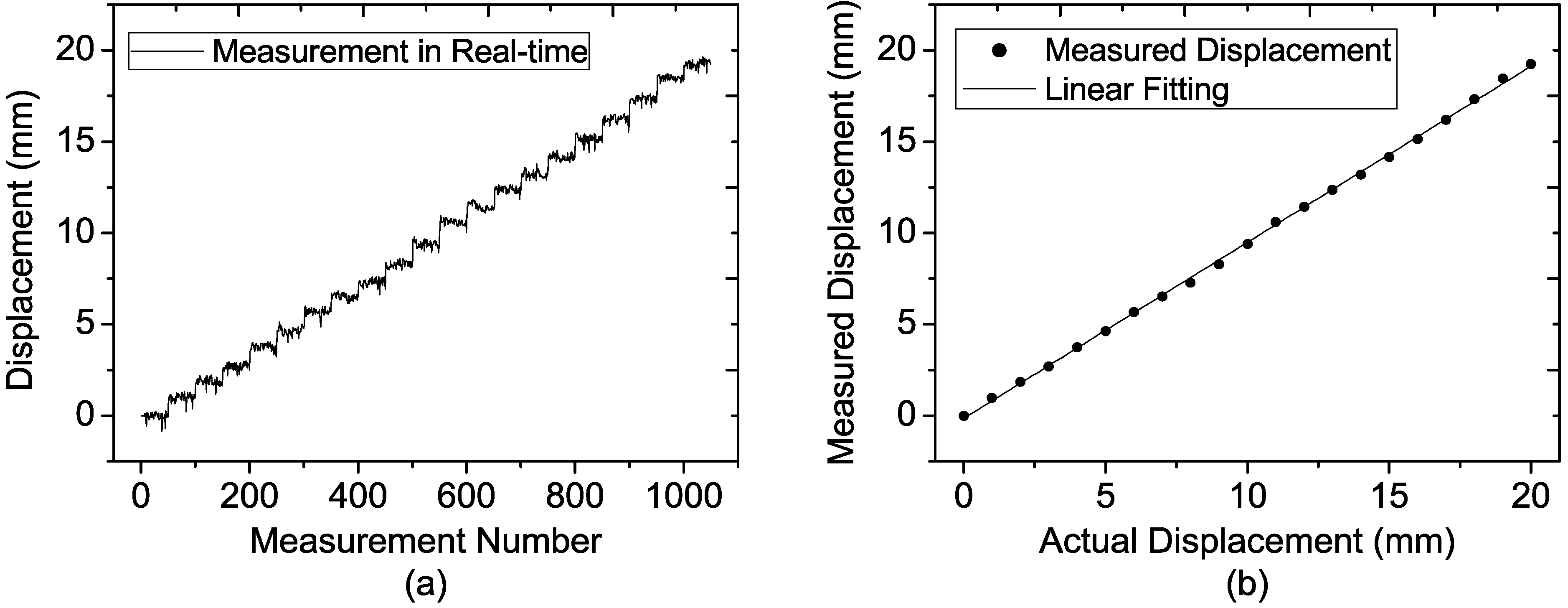
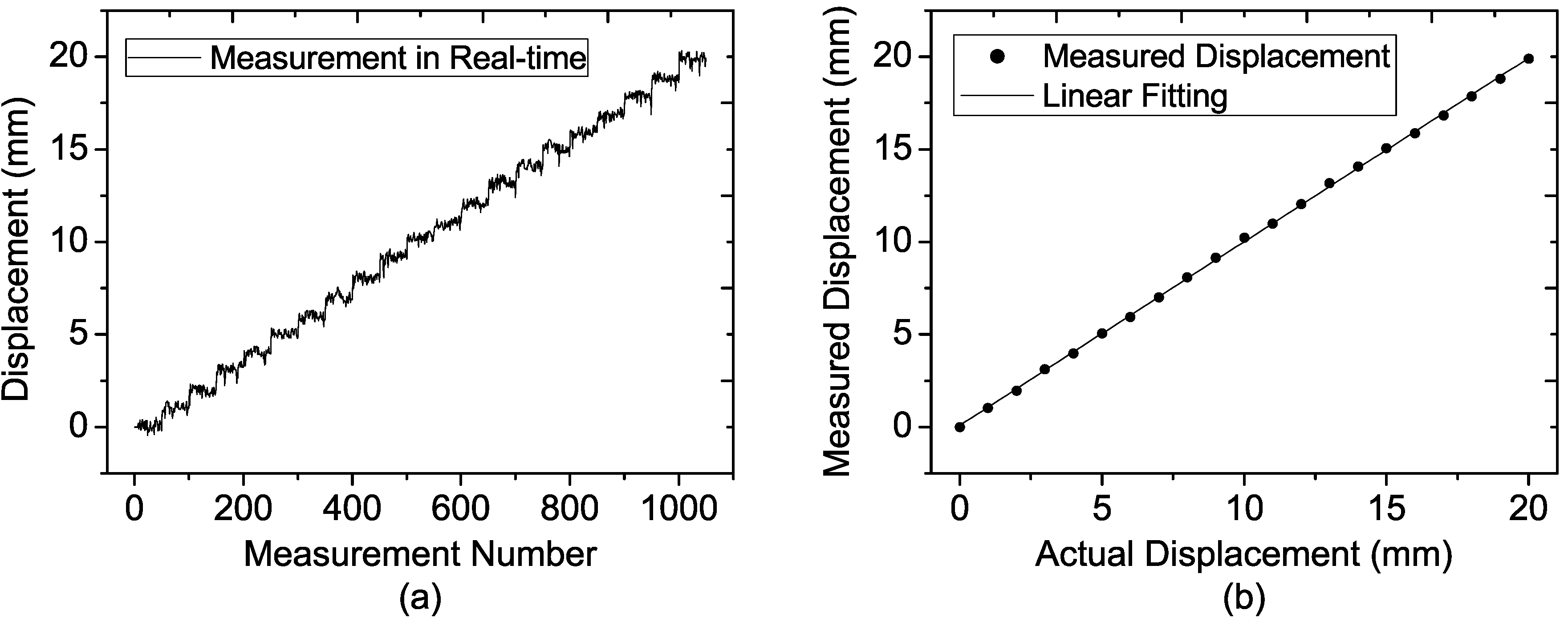
6.1. Single-target Experiment Using One Corner Cube

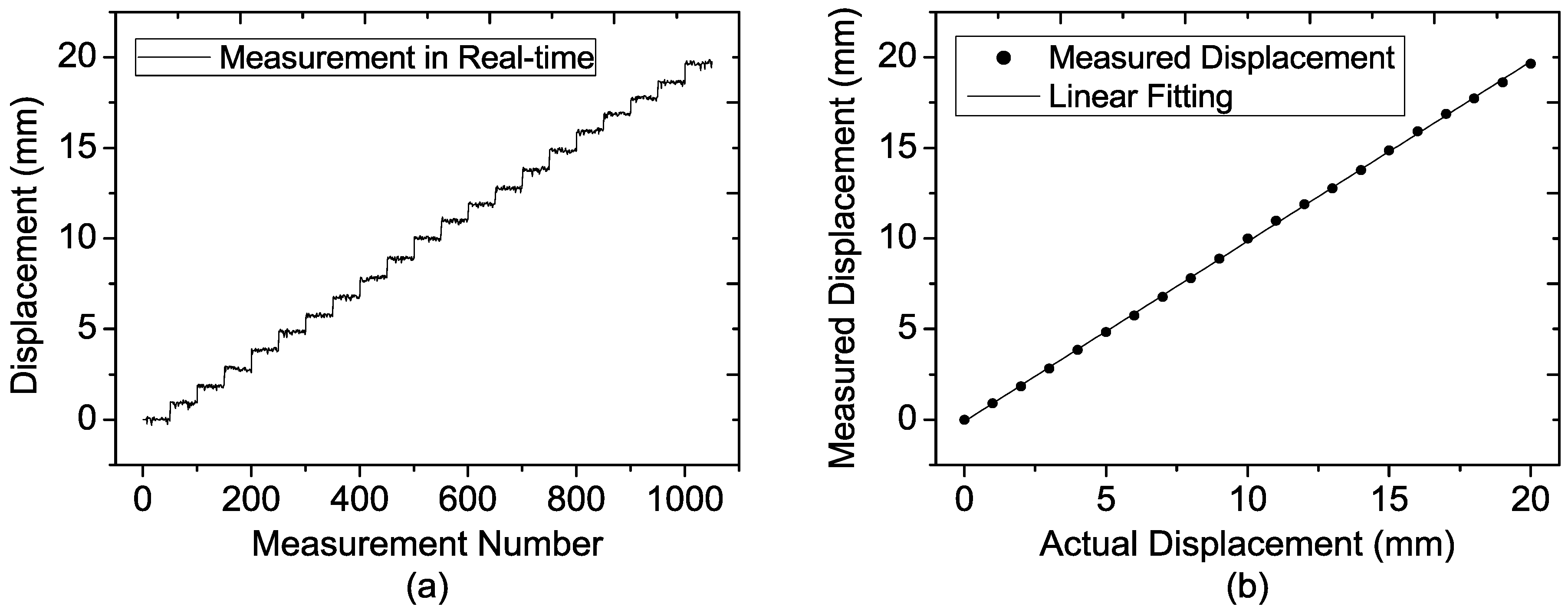
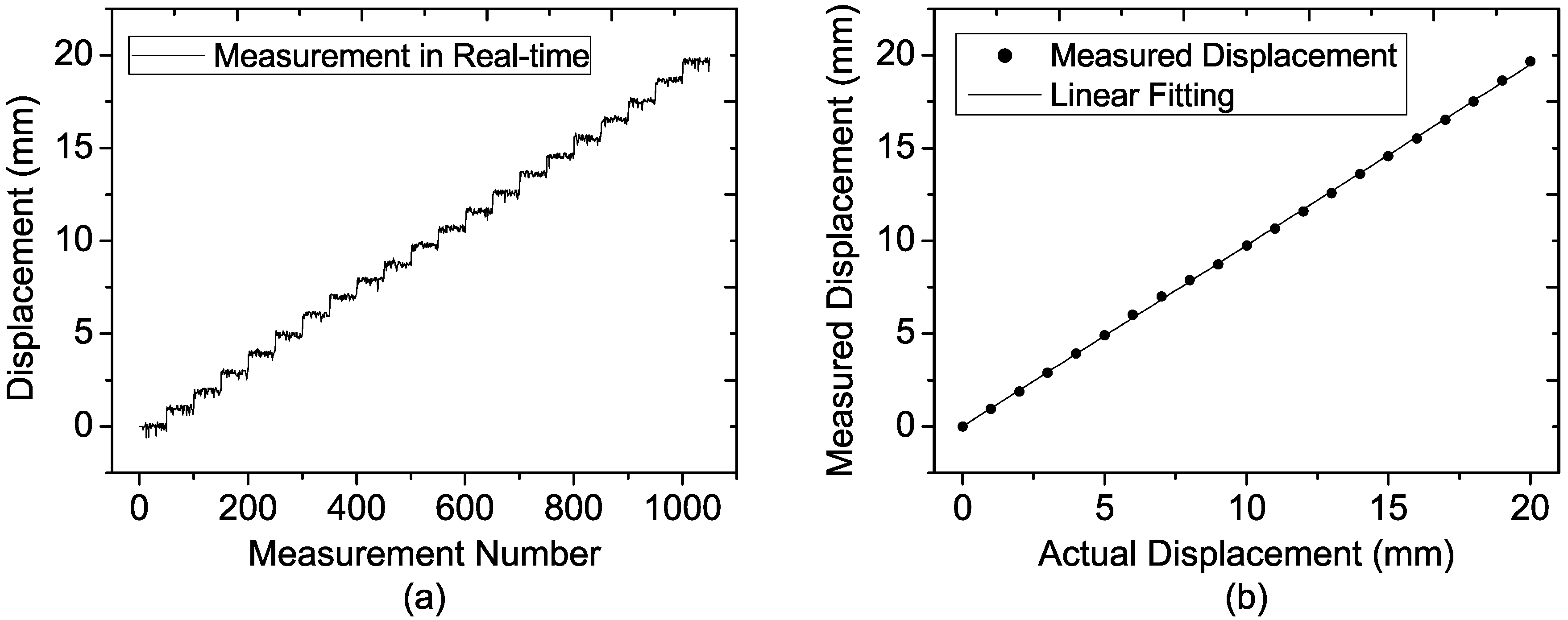
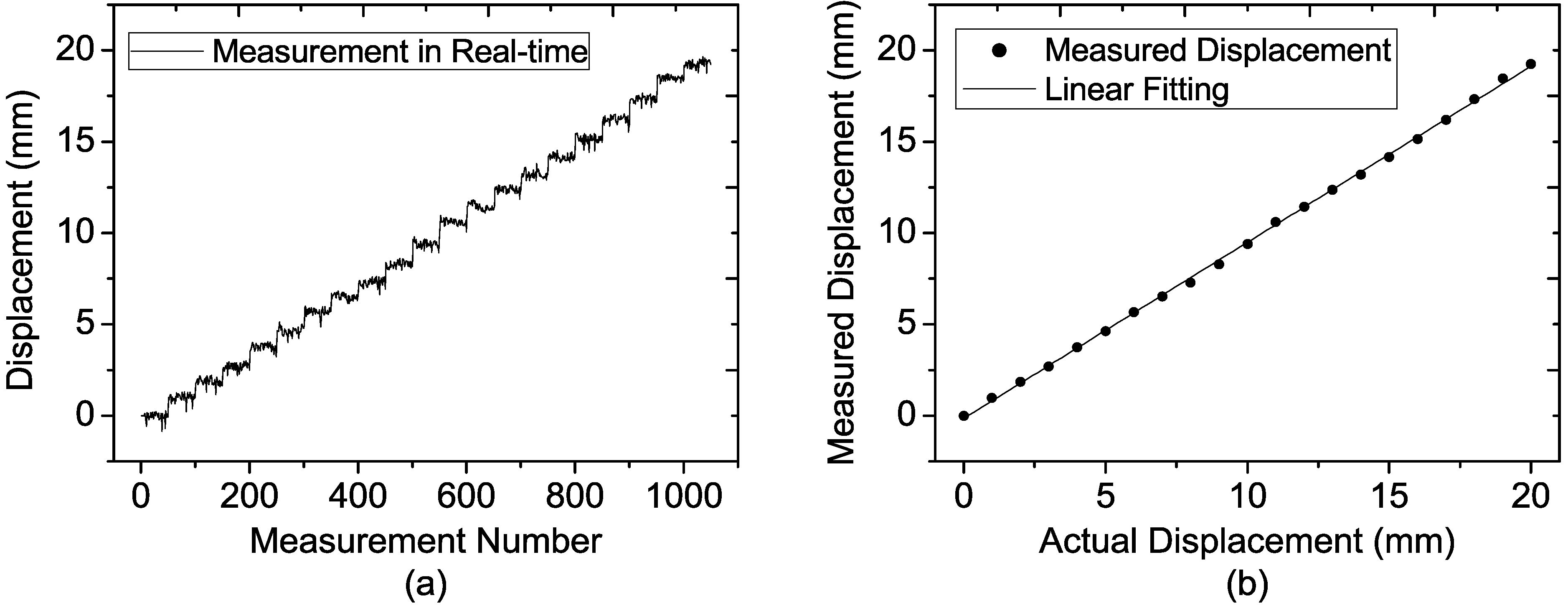
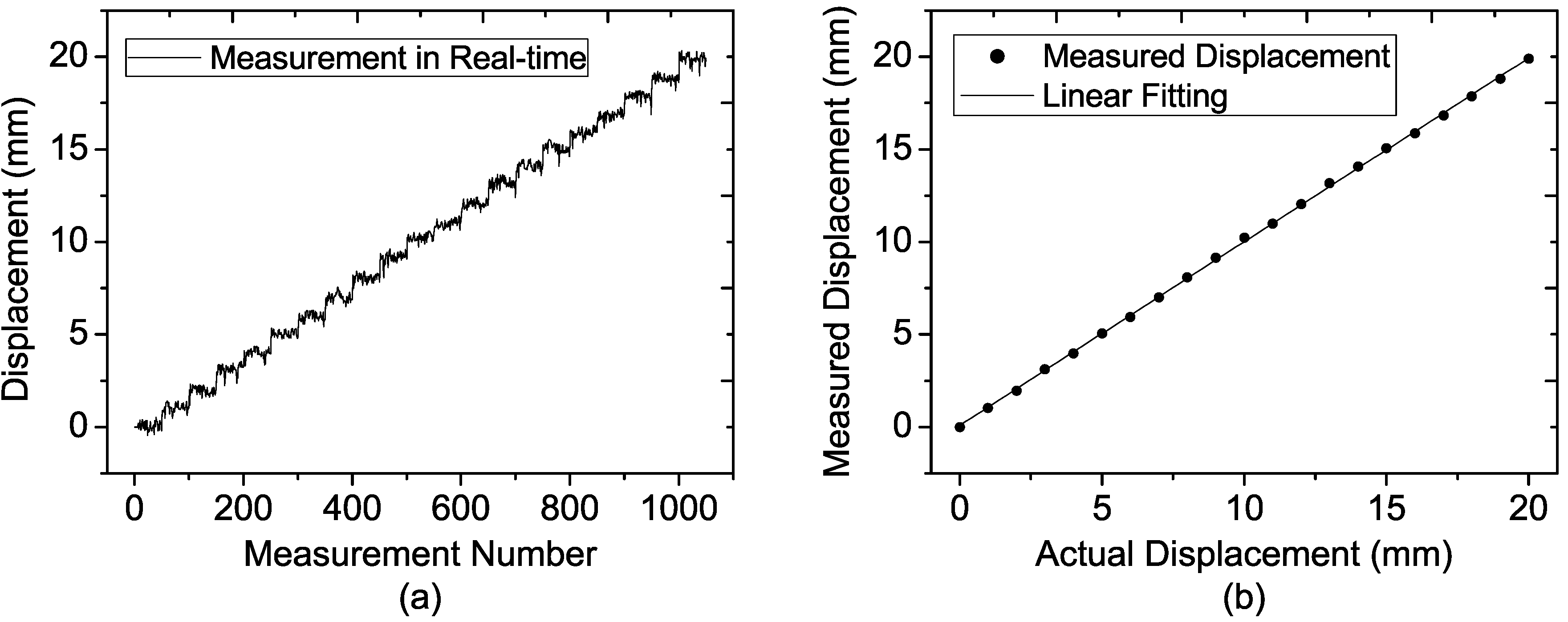
| Target Location | |||||
|---|---|---|---|---|---|
| 20 m | 30 m | 40 m | 50 m | ||
| Experiment | 0.091 mm | 0.136 mm | 0.201 mm | 0.235 mm | |
| Theory | 0.08 mm | 0.124 mm | 0.166 mm | 0.21 mm | |
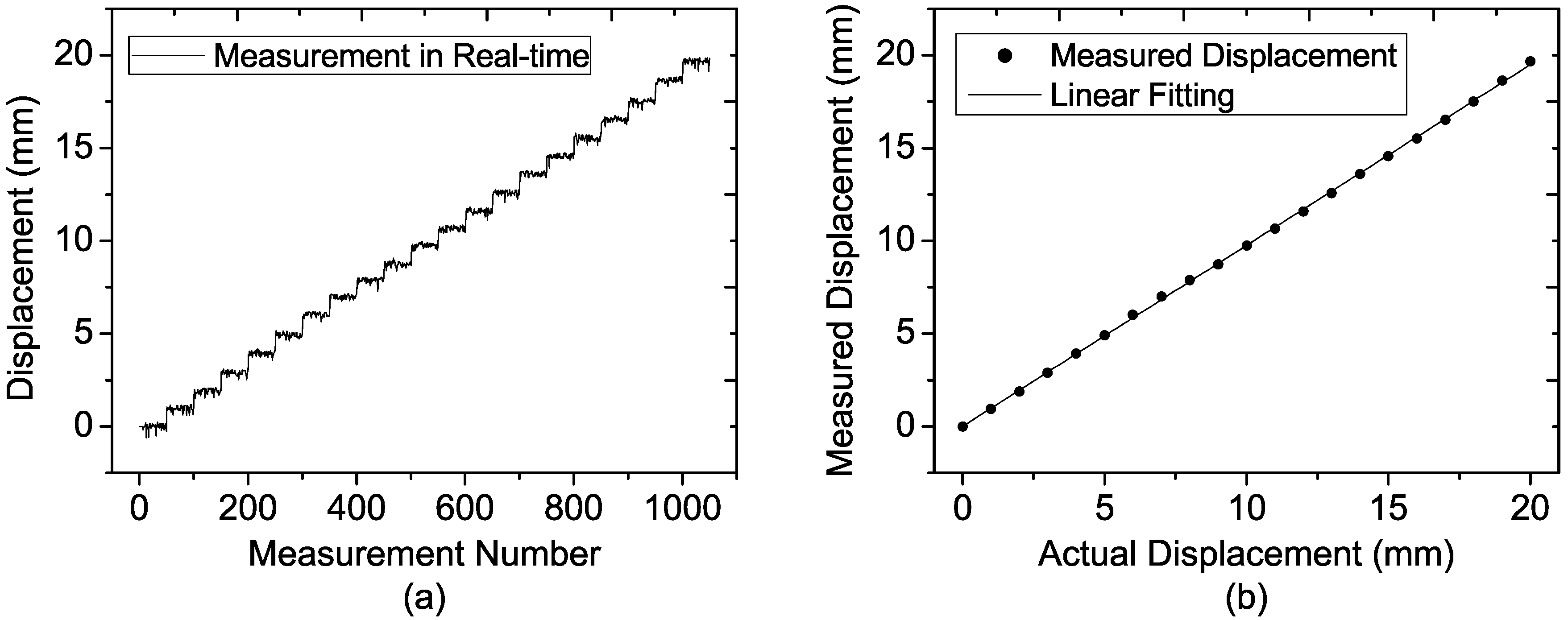
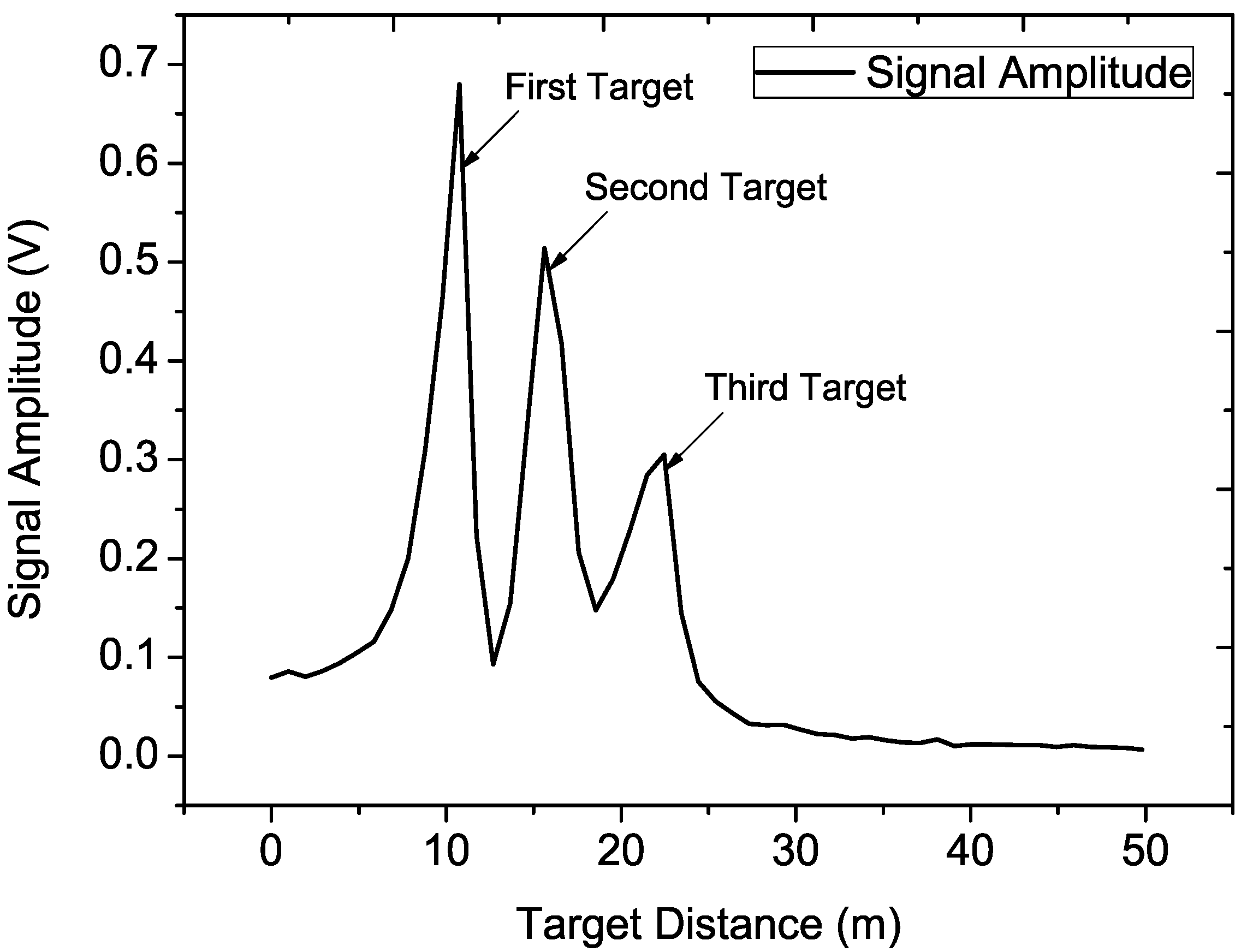
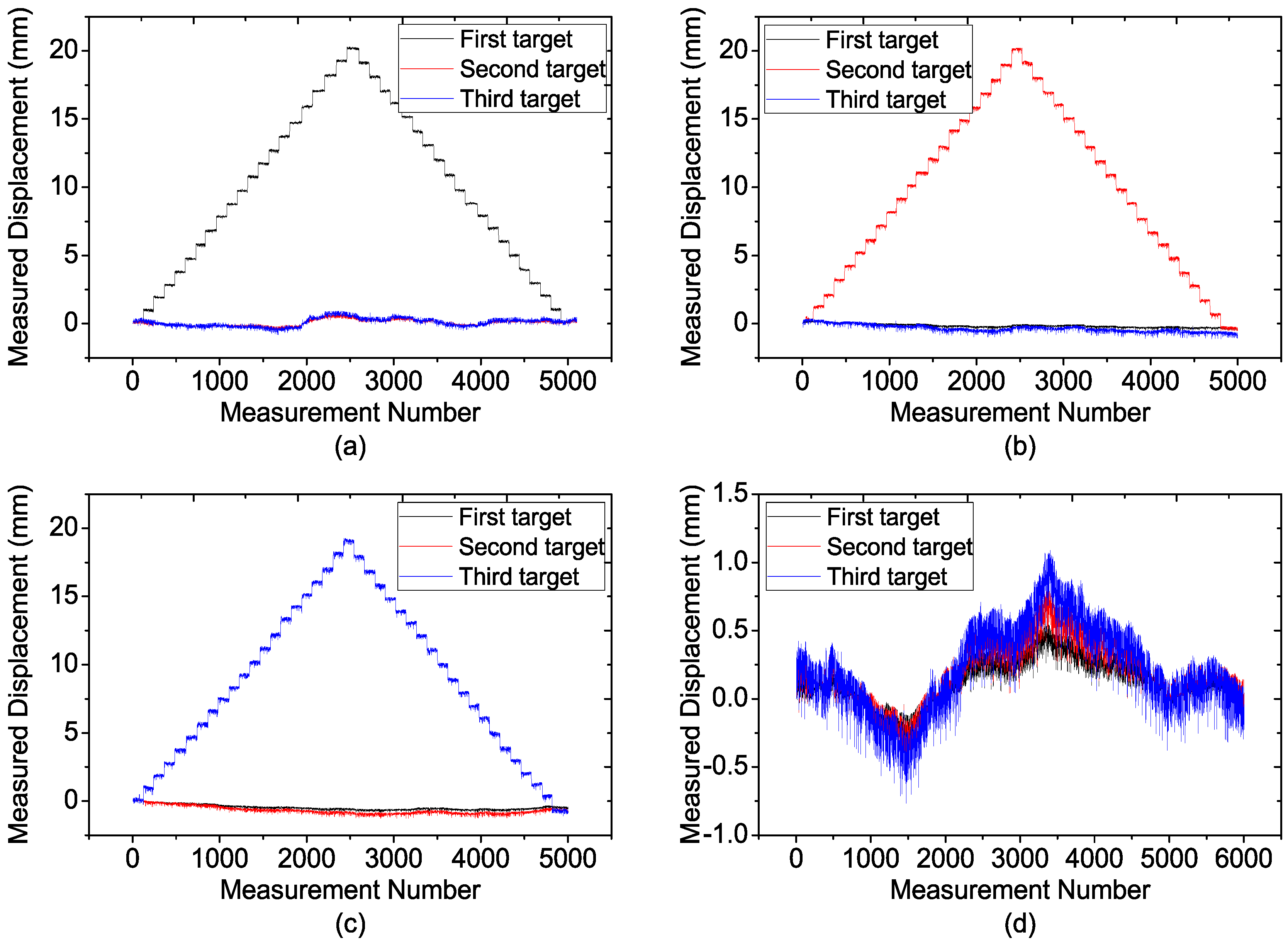
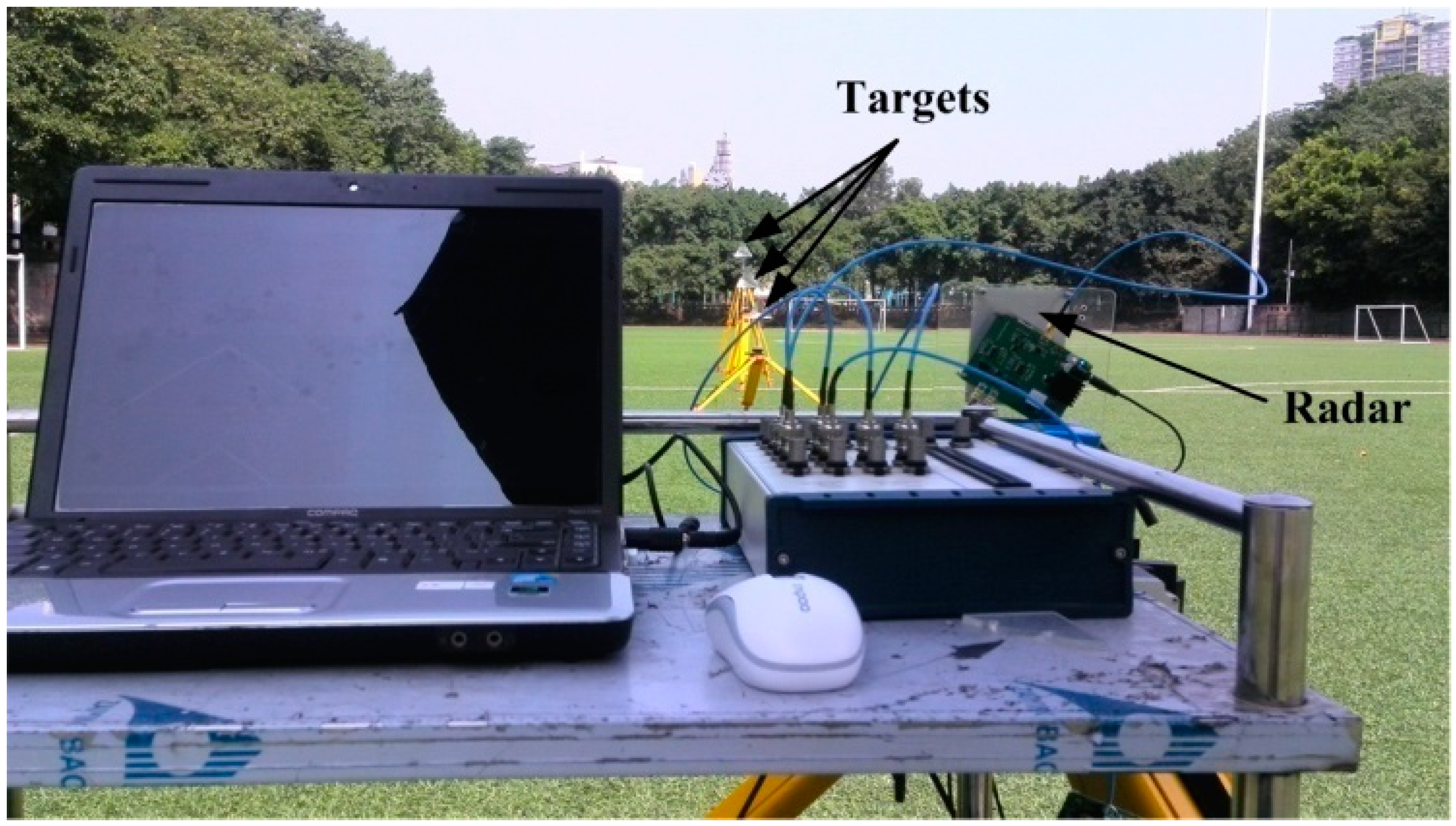
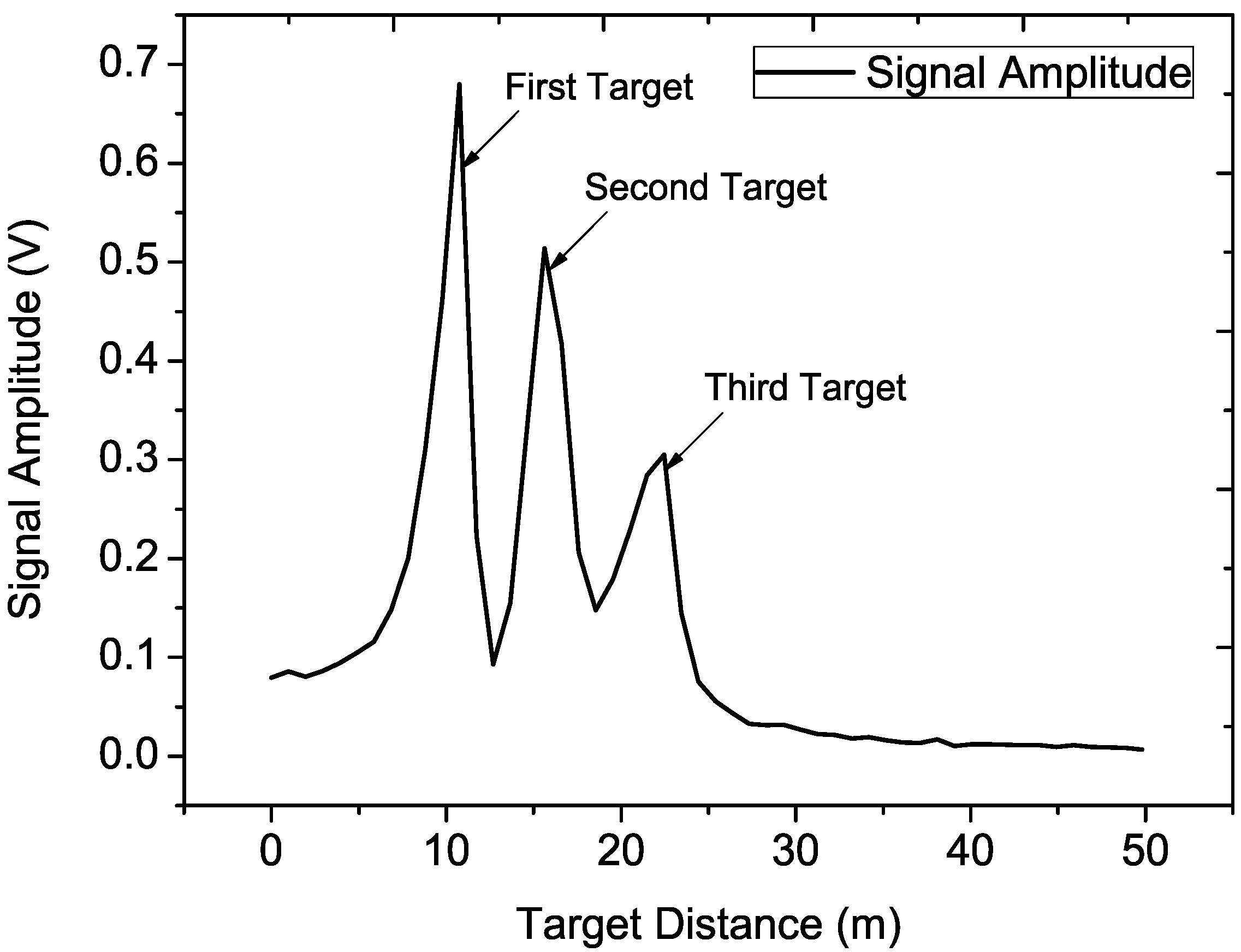
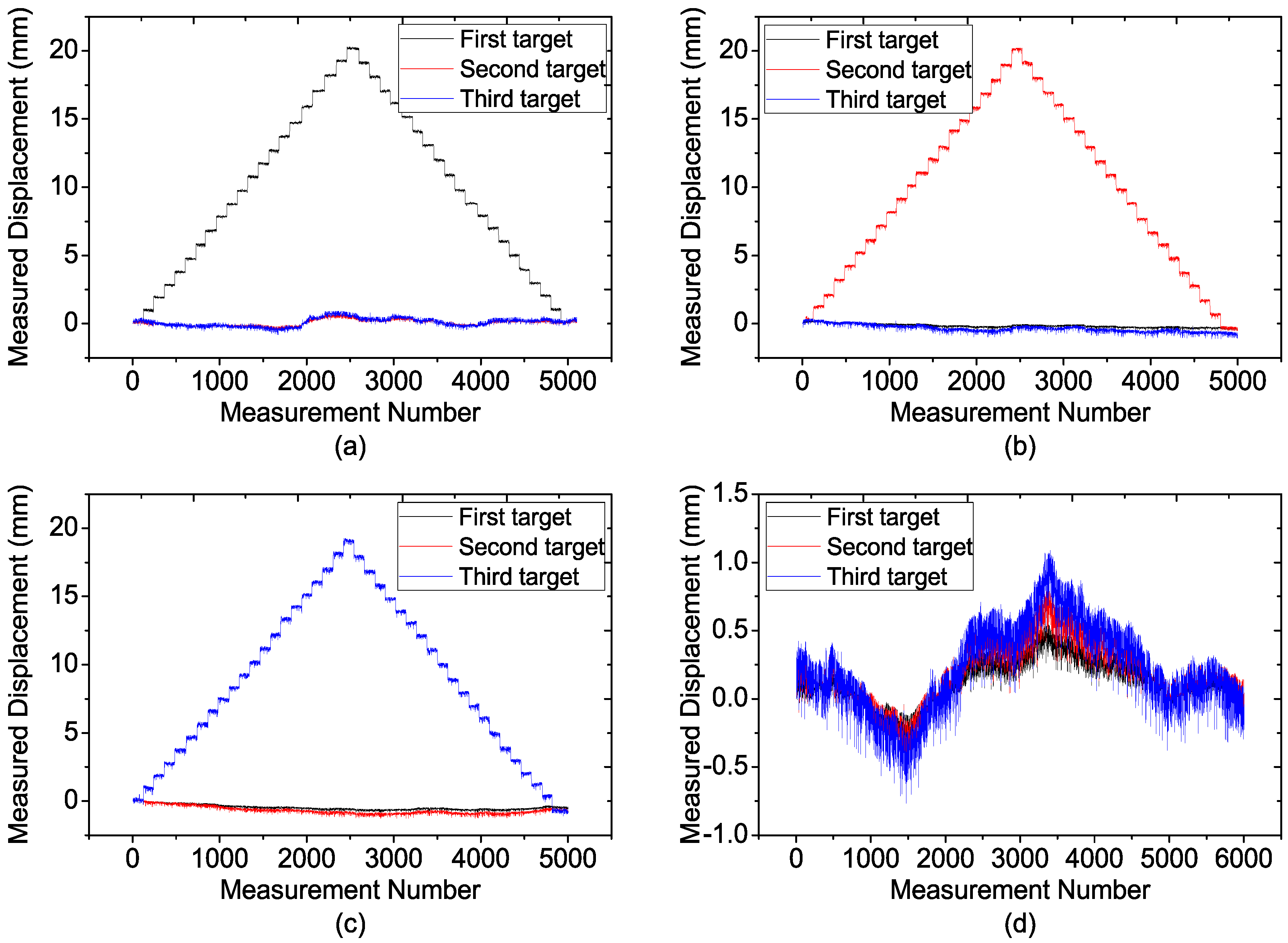
6.2. Multi-Target Experiment Using Three Corner Cubes
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Jo, H.; Sim, S.H.; Nagayama, T.; Spencer, B.F., Jr. Development and Application of High-Sensitivity Wireless Smart Sensors for Decentralized Stochastic Modal Identification. J. Eng. Mech. 2012, 138, 683–694. [Google Scholar] [CrossRef]
- Liu, G.; Mao, Z.; Todd, M.D.; Huang, Z. Damage Assessment with State-Space Embedding Strategy and Singular Value Decomposition under Stochastic Excitation. Struct. Health Monit. 2013, 2, 131–142. [Google Scholar]
- Atzeni, C.; Bicci, A.; Dei, D.; Fratini, M.; Pieraccini, M. Remote Survey of the Leaning Tower of Pisa by Interferometric Sensing. IEEE Geosci. Remote Sens. Lett. 2010, 7, 185–189. [Google Scholar] [CrossRef]
- Stabile, T.A.; Giocoli, A.; Perrone, A.; Palombo, A.; Pascucci, S.; Pignatti, S. A new joint application of non-invasive remote sensing techniques for structural health monitoring. J. Geophys. Eng. 2012, 9, S53–S63. [Google Scholar] [CrossRef]
- Wu, L.; Casciati, F. Local positioning systems versus structural monitoring: A review. Struct. Control Health Monit. 2014, 21, 1209–1221. [Google Scholar] [CrossRef]
- Tapete, D.; Casagli, N.; Luzi, G.; Fanti, R.; Gigli, G.; Leva, D. Integrating radar and laser-based remote sensing techniques for monitoring structural deformation of archaeological monuments. J. Archaeol. Sci. 2013, 40, 176–189. [Google Scholar] [CrossRef] [Green Version]
- Luzi, G.; Monserrat, O.; Crosetto, M. Real Aperture Radar interferometry as a tool for buildings vibration monitoring: Limits and potentials from an experimental study. In Proceedings of the 10th International Conference on Vibration Measurements by Laser and Non-Contact Techniques, Ancona, Italy, 27–29 June 2012; pp. 309–317.
- Caduff, R. Registration and visualisation of deformation maps from terrestrial radar interferometry using photogrammetry and structure from Motion. Photogramm. Record 2014, 29, 167–186. [Google Scholar] [CrossRef]
- Jabir, S.A.A.; Gupta, N.K. Thick-Film Ceramic Strain Sensors for Structural Health Monitoring. IEEE Trans. Instrum. Meas. 2011, 60, 3669–3676. [Google Scholar] [CrossRef]
- Liu, Z.; Mrad, N. Validation of Strain Gauges for Structural Health Monitoring with Bayesian Belief Networks. IEEE Sens. J. 2013, 13, 400–407. [Google Scholar] [CrossRef]
- Lee, J.J.; Shinozuka, M. A vision-based system for remote sensing of bridge displacement. NDT&E Int. 2006, 39, 425–431. [Google Scholar] [CrossRef]
- Gonzalez-Aguilera, D.; Gomez-Lahoz, J.; Sanchez, J. A new approach for structural monitoring of large dams with a three-dimensional laser scanner. Sensors 2008, 8, 5866–5883. [Google Scholar] [CrossRef]
- Park, J.W.; Lee, J.J.; Jung, H.J.; Myung, H. Vision-based displacement measurement method for high-rise building structures using partitioning approach. NDT&E Int. 2010, 43, 642–647. [Google Scholar] [CrossRef]
- Im, S.B.; Hurlebaus, S.; Kang, Y.J. Summary Review of GPS Technology for Structural Health Monitoring. J. Struct. Eng. 2013, 139, 1653–1664. [Google Scholar] [CrossRef]
- Kohut, P.; Holak, K.; Uhl, T.; Ortyl, L.; Owerko, T.; Kuras, P.; Kocierz, R. Monitoring of a civil structure’s state based on noncontact measurements. Struct. Health Monit. 2013, 12, 411–429. [Google Scholar] [CrossRef]
- Psimoulis, P.A.; Stiros, S.C. Measuring Deflections of a Short-Span Railway Bridge Using a Robotic Total Station. J. Bridge Eng. 2013, 18, 182–185. [Google Scholar] [CrossRef]
- Park, J.; Nguyen, C. Development of a new millimeter-wave integrated-circuit sensor for surface and subsurface sensing. IEEE Sens. J. 2006, 6, 650–655. [Google Scholar] [CrossRef]
- Haddadi, K.; Wang, M.M.; Glay, D.; Lasri, T. A 60 GHz Six-Port Distance Measurement System with Sub-Millimeter Accuracy. IEEE Microw. Wirel. Compon. Lett. 2009, 19, 644–646. [Google Scholar] [CrossRef]
- Zhang, C.; Kuhn, M.J.; Merkl, B.C.; Fathy, A.E.; Mahfouz, M.R. Real-Time Noncoherent UWB Positioning Radar with Millimeter Range Accuracy: Theory and Experiment. IEEE Trans. Microw. Theory Tech. 2010, 58, 9–20. [Google Scholar] [CrossRef]
- Bakhtiari, S.; Elmer, T.W., II; Cox, N.M.; Gopalsami, N.; Raptis, A.C.; Liao, S.; Mikhelson, I.; Sahakian, A.V. Compact Millimeter-Wave Sensor for Remote Monitoring of Vital Signs. IEEE Trans. Instrum. Meas. 2012, 61, 830–841. [Google Scholar] [CrossRef]
- Barbon, F.; Vinci, G.; Lindner, S.; Weigel, R.; Koelpin, A. A six-port interferometer based micrometer-accuracy displacement and vibration measurement radar. In Proceedings of the IEEE International Microwave Symposium Digest, Montreal, QC, Canada, 17–22 June 2012; pp. 1–3.
- Max, S.; Vossiek, M.; Gulden, P. Fusion of FMCW secondary radar signal beat frequency and phase estimations for high precision distance measurement. In Proceedings of the 5th European Radar Conference, Amsterdam, The Netherlands, 27–31 October 2008; pp. 124–127.
- Ayhan, S.; Pauli, M.; Kayser, T.; Scherr, S.; Zwick, T. FMCW radar system with additional phase evaluation for high accuracy range detection. In Proceedings of the 8th European Radar Conference, Manchester, UK, 9–14 October 2011; pp. 117–120.
- Pauli, M.; Ayhan, S.; Scherr, S.; Rusch, C.; Zwick, T. Range detection with micrometer precision using a high accuracy FMCW radar system. In Proceedings of the 9th International Multi-Conference on Systems, Signals and Devices, Chemnitz, Germany, 20–23 March 2012; pp. 1–4.
- Wang, G.; Munoz-Ferreras, J.M.; Gu, C.; Li, C.; Gomez-Garcia, R. Application of Linear-Frequency-Modulated Continuous-Wave (LFMCW) Radars for Tracking of Vital Signs. IEEE Trans. Microw. Theory Tech. 2014, 62, 1387–1399. [Google Scholar] [CrossRef]
- Richards, M.A. Fundamental of Radar Signal Processing, 2nd ed.; McGraw-Hill: New York, NY, USA, 2014. [Google Scholar]
- Oppenheim, A.V.; Chafer, R.W. Discrete-Time Signal Processing, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2009. [Google Scholar]
- Ferrero, A.; Salicone, S. Measurement uncertainty. IEEE Instrum. Meas. Mag. 2006, 9, 44–51. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Chen, W.; Liu, G.; Yan, R.; Xu, H.; Qi, Y. A Noncontact FMCW Radar Sensor for Displacement Measurement in Structural Health Monitoring. Sensors 2015, 15, 7412-7433. https://doi.org/10.3390/s150407412
Li C, Chen W, Liu G, Yan R, Xu H, Qi Y. A Noncontact FMCW Radar Sensor for Displacement Measurement in Structural Health Monitoring. Sensors. 2015; 15(4):7412-7433. https://doi.org/10.3390/s150407412
Chicago/Turabian StyleLi, Cunlong, Weimin Chen, Gang Liu, Rong Yan, Hengyi Xu, and Yi Qi. 2015. "A Noncontact FMCW Radar Sensor for Displacement Measurement in Structural Health Monitoring" Sensors 15, no. 4: 7412-7433. https://doi.org/10.3390/s150407412