
Theoretical and Experimental Study of Radial Velocity Generation for Extending Bandwidth of Magnetohydrodynamic Angular Rate Sensor at Low Frequency

Abstract
:1. Introduction
2. Simplified Model of Modified MHD ARS
2.1. Description of the Modified MHD ARS Introducing Coriolis Effect
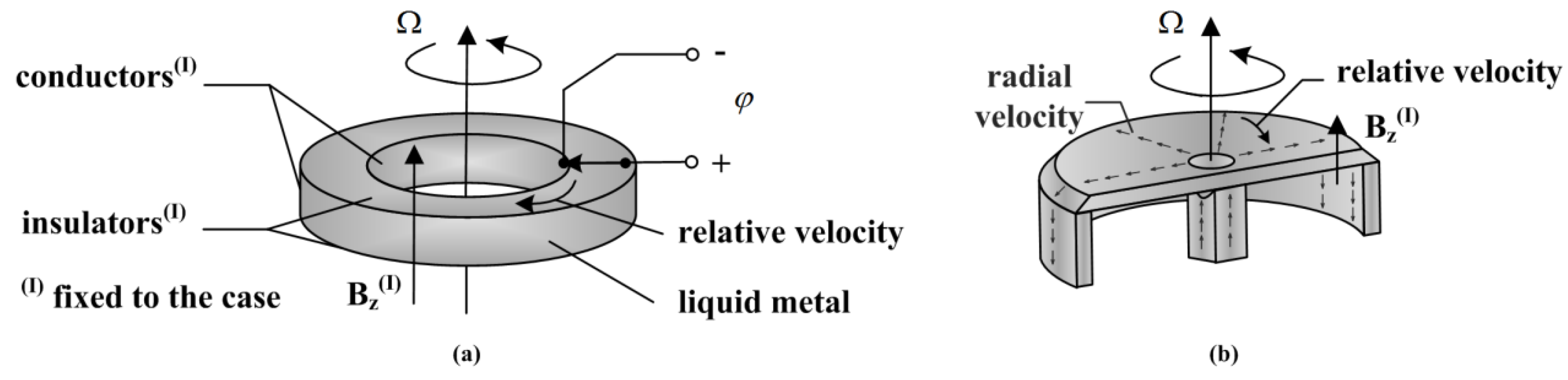
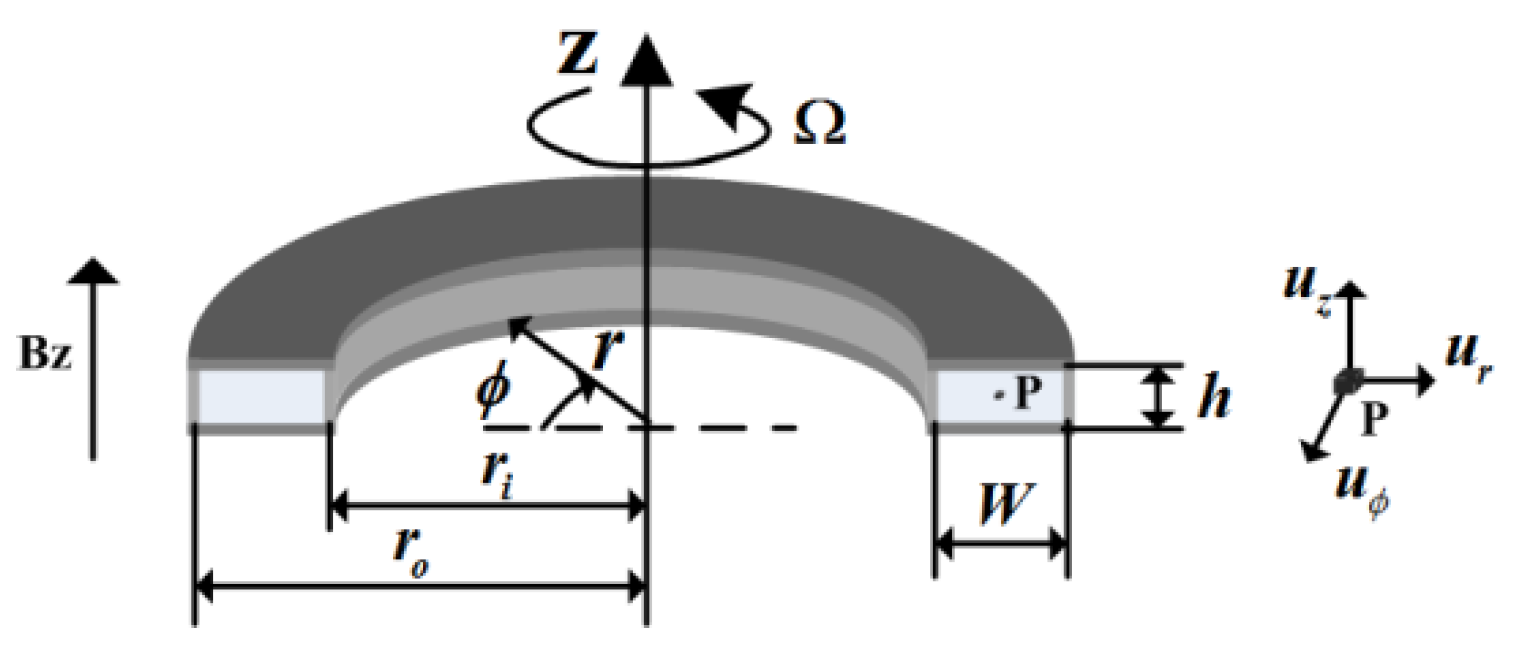
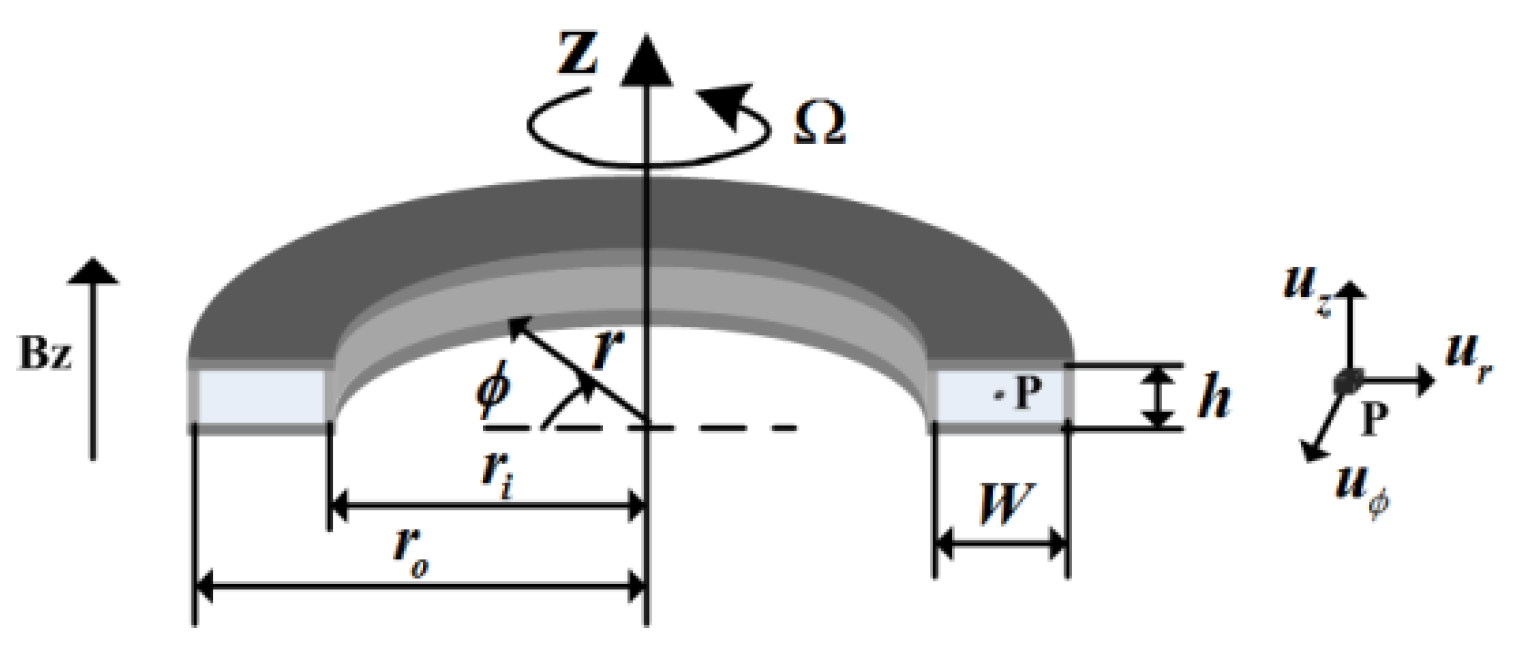
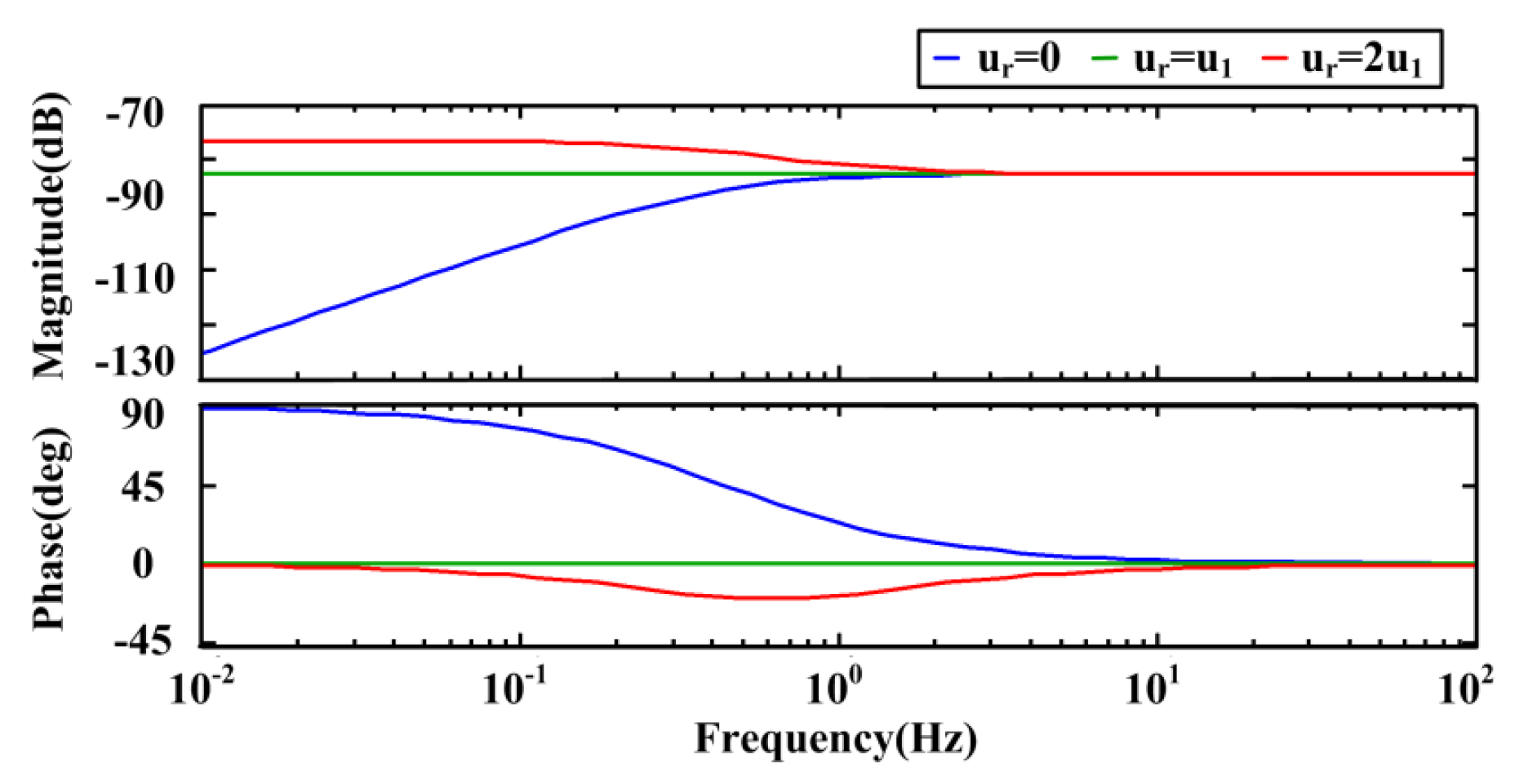
2.2. The Simplified Model of the Modified MHD ARS Introducing Coriolis Effect

3. The Device to Study the Radial Velocity Generation by MHD Pump (DRVG)
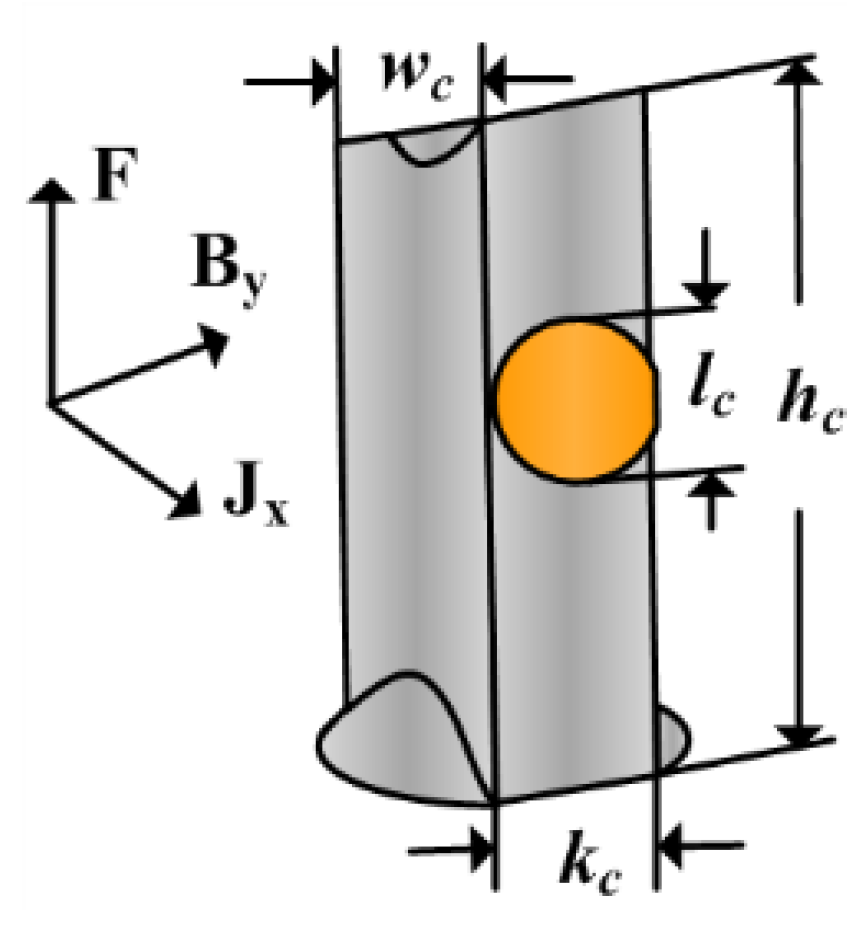
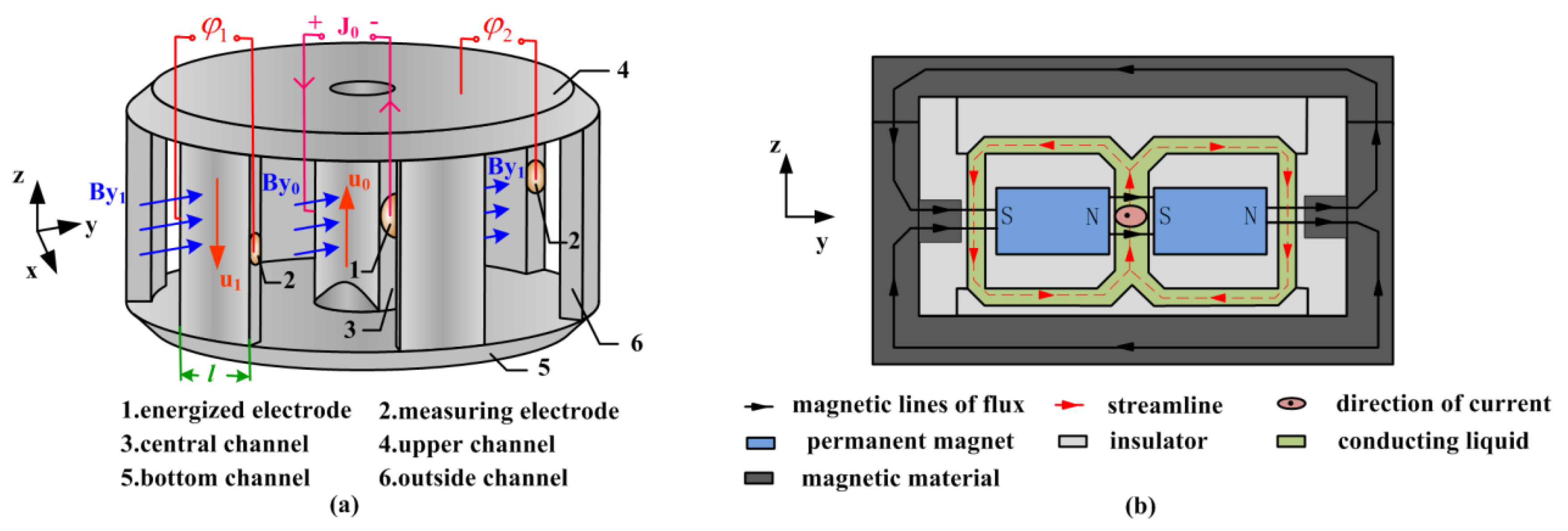
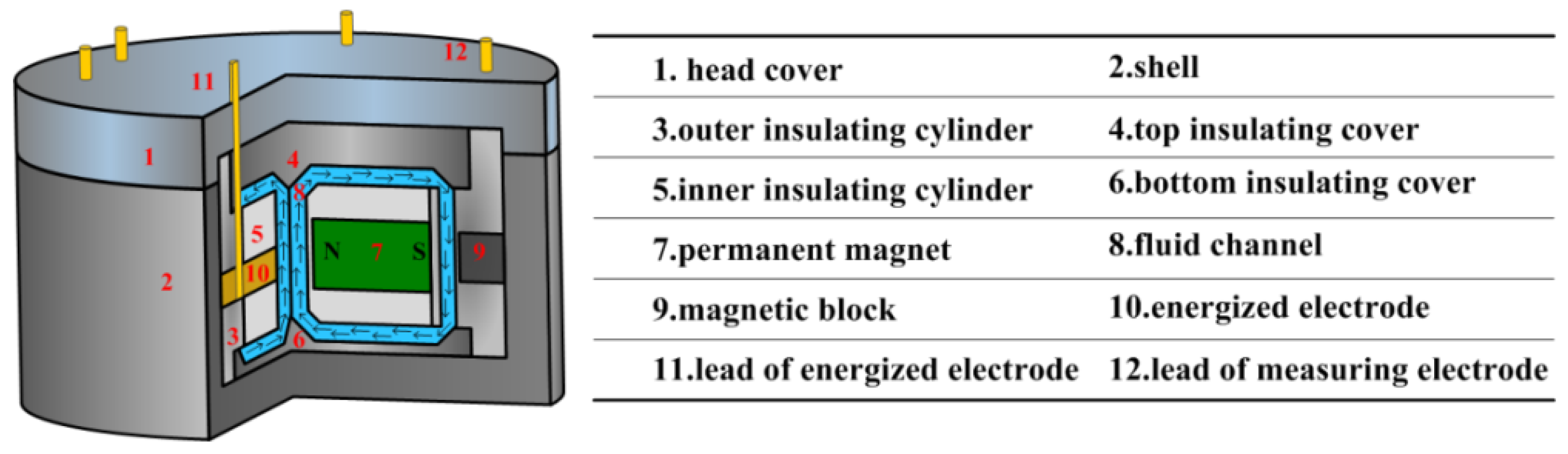
3.1. Description of the Design

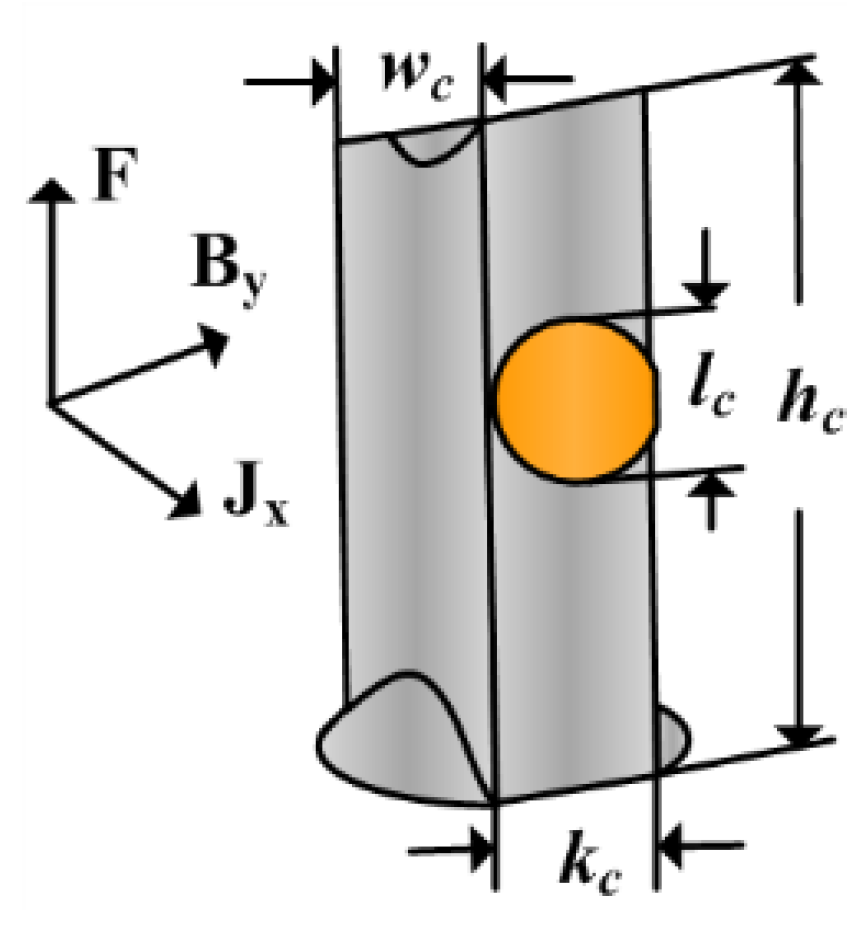
3.2. The Government Equations in DRVG
4. Simulation of DRVG

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mechanical Structure Parameters | Physical Parameters of Fluid | Mercury | |
|---|---|---|---|
| Inner radius of annular channel ri | 6 | Density ρ (kg/m3) | 1.354 × 104 |
| Outer radius of annular channel ro | 28 | Electrical conductivity σ (1/Ω⋅m) | 1.044 × 106 |
| Height of upper and bottom channel h | 3 | Kinematic viscosity ν (m2/s) | 1.125 × 10−7 |
| The length of every channel l | 11.65 | Magnetic permeability μ (H/m) | 1.257 × 10−6 |
| Radian of every outside channel (deg) | 24 | Facet of energized and electrodes electrodes | conducting |
| Thickness of outside channel | 3 | The surface except electrodes | insulating |
| Diameter of measuring electrode | 2 | Gravity | √ |
| Thickness of central channel kc | * | Magnetic field intensity in central channel By0(T) | 0.6 |
| Area of energized electrodes Se = π(kc/2)2 | Magnetic field intensity in outside channel By1(T) | 0.5 | |
| Height of central and outside channel hc | * | Energized current density J | * |
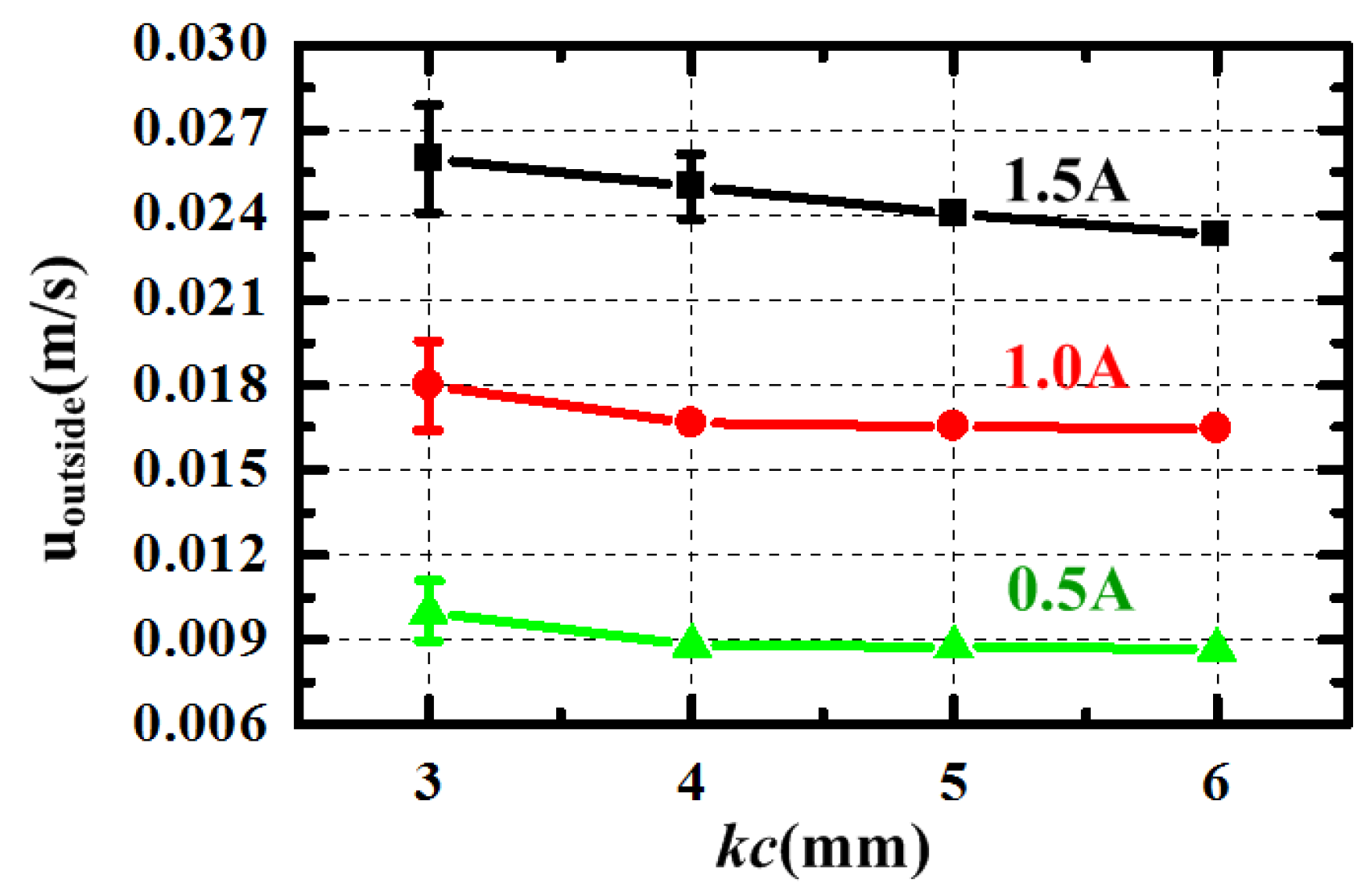
4.1. Influence of Central Channel’s Thickness kc

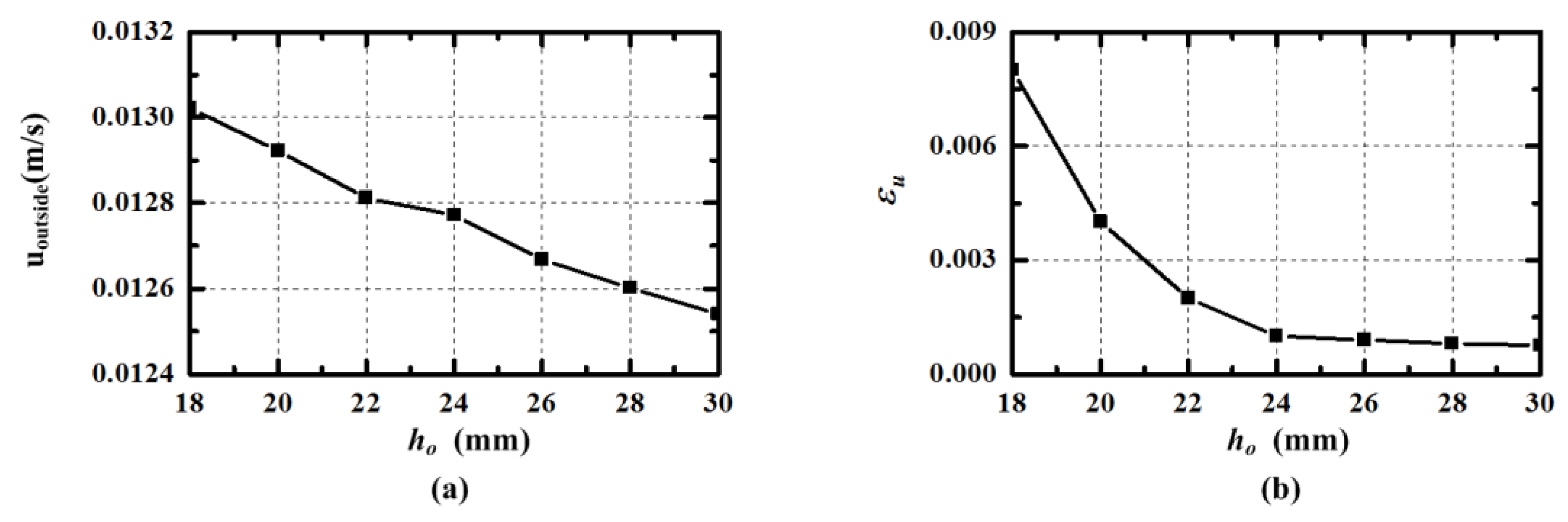
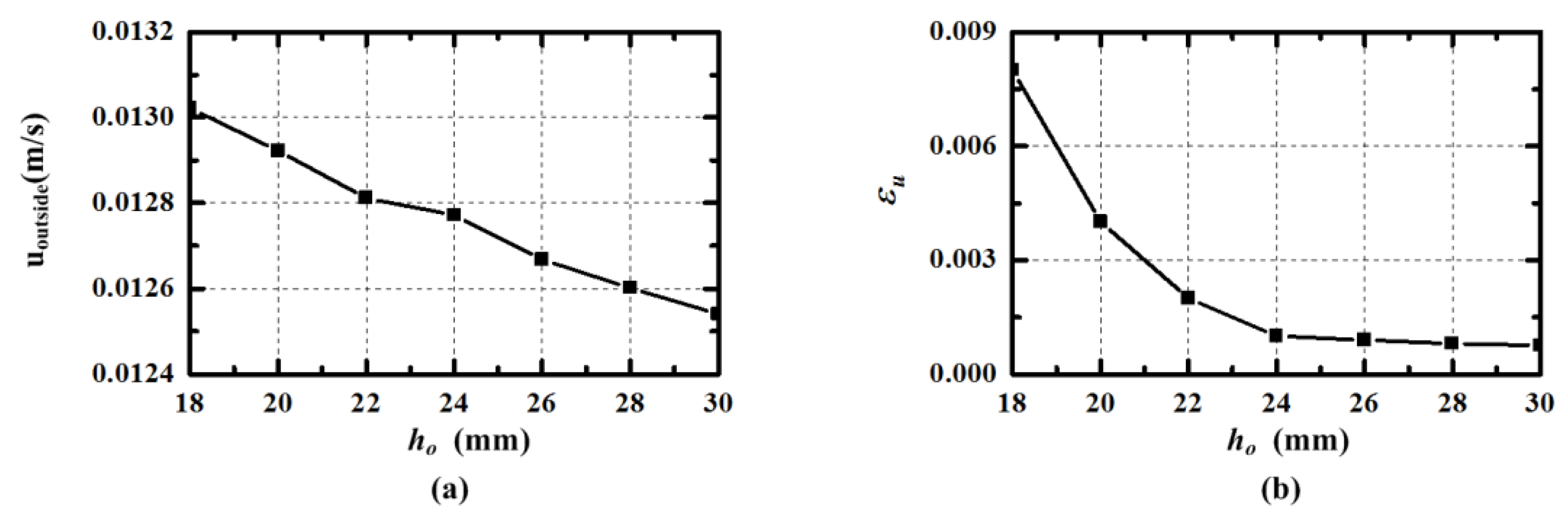
4.2. Influence of Central and Outside Channel’s Height hc
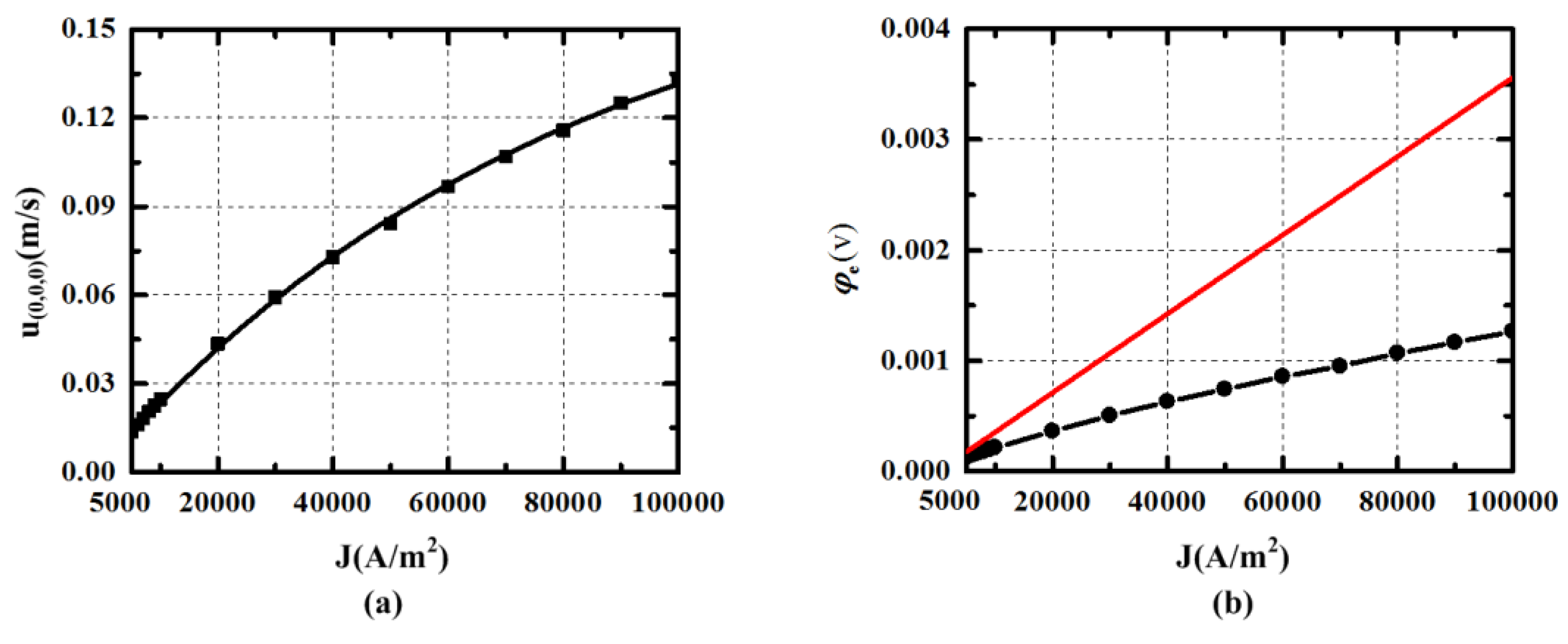
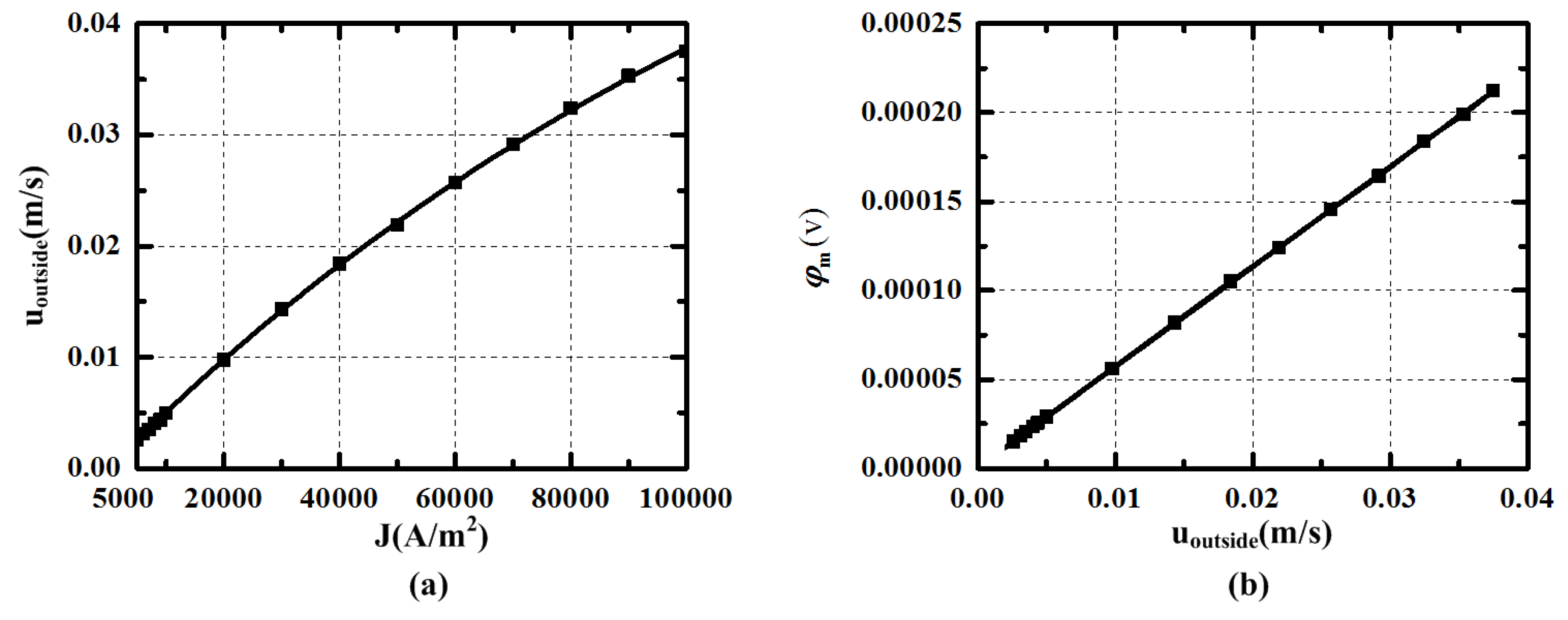
4.3. Influence of Energized Current Density J

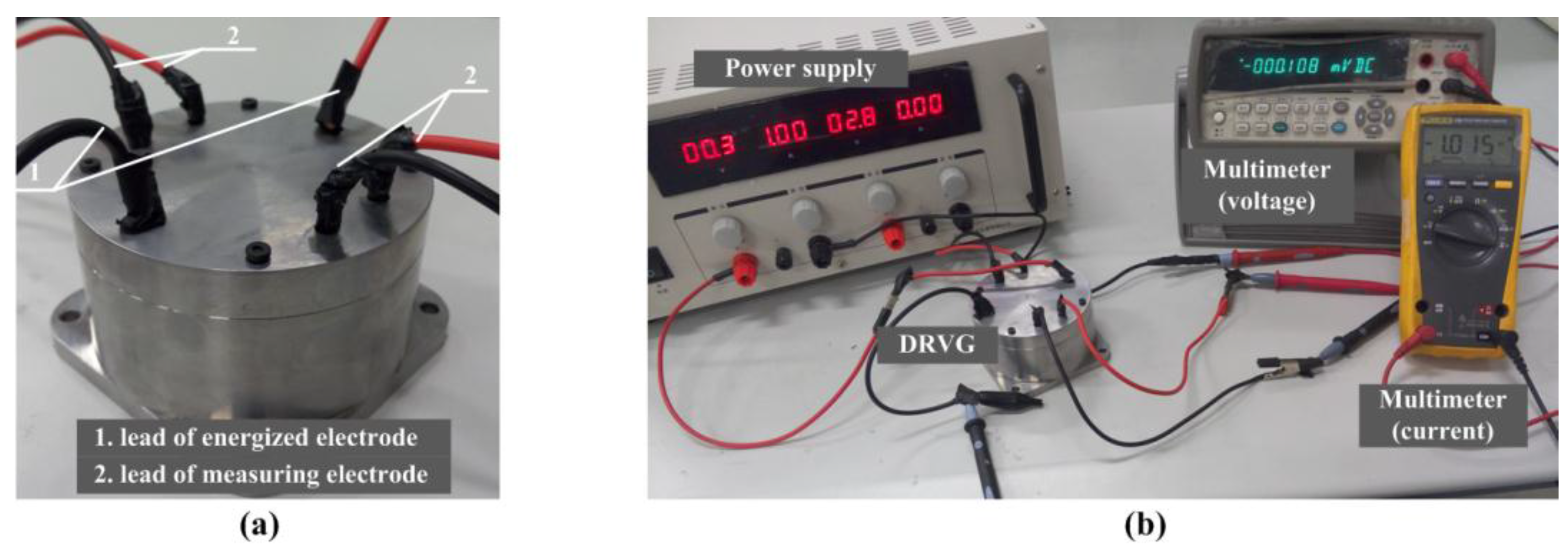
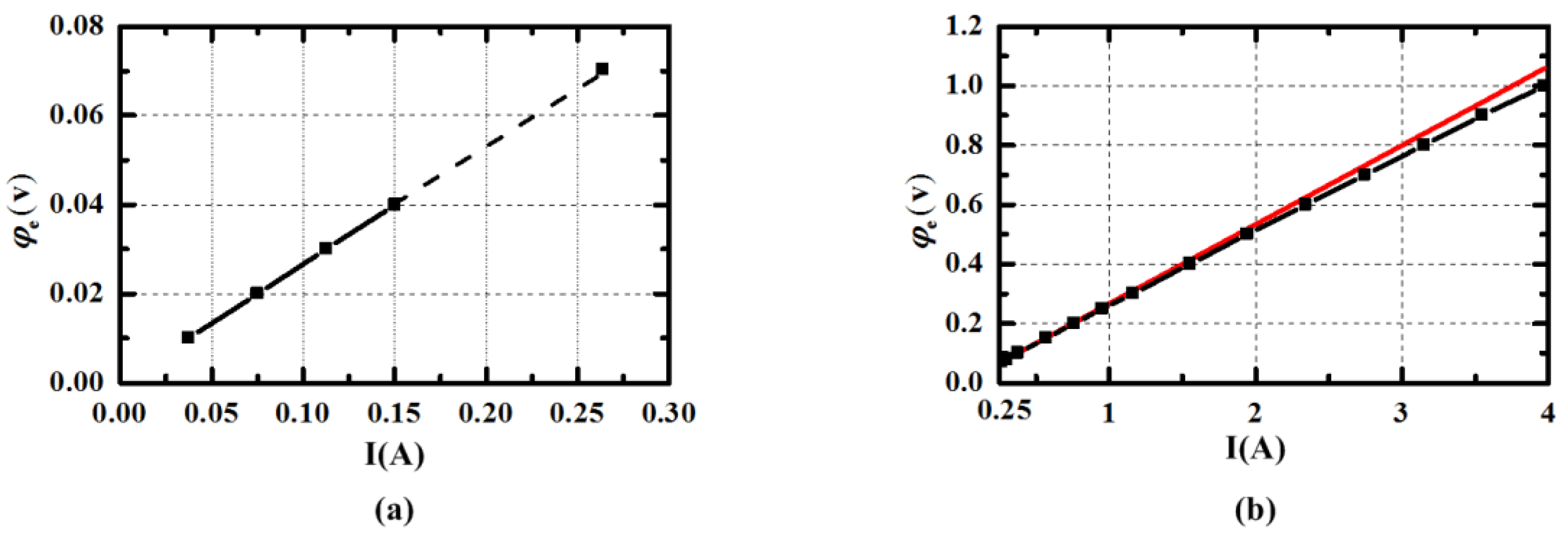
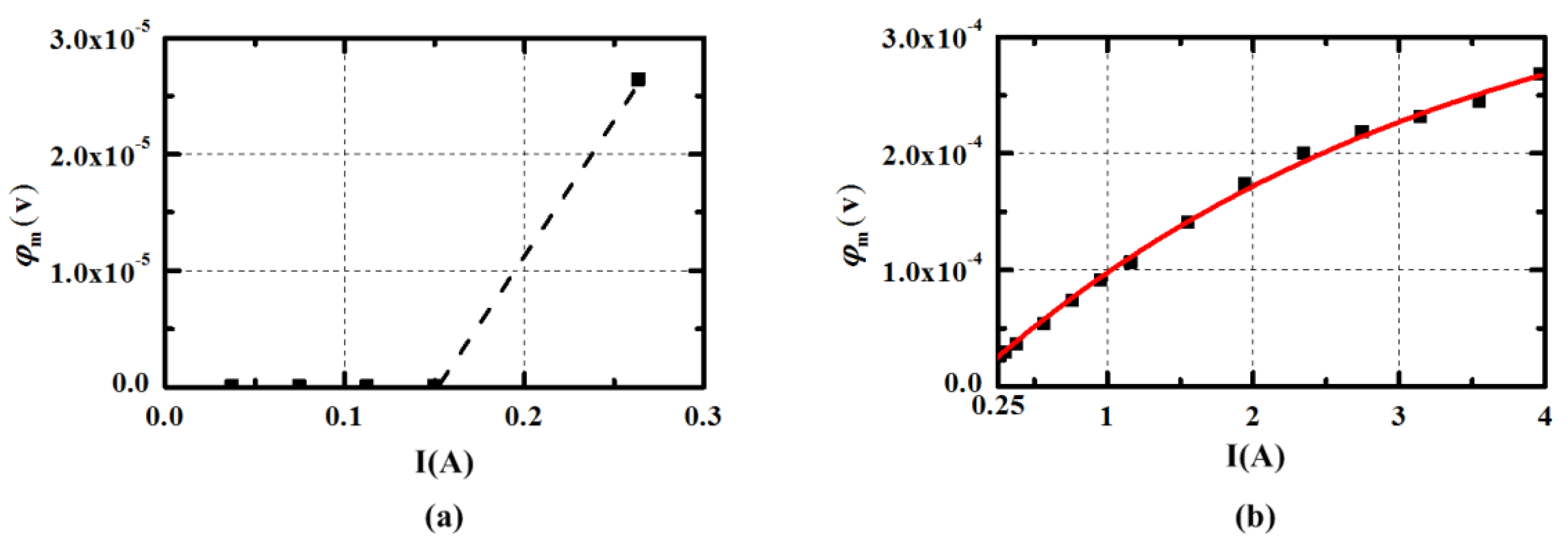
5. Experiment of DRVG



6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Armenise, M.N.; Ciminelli, C.; Dell’Olio, F.; Passaro, V.M. Advances in Gyroscope Technologies; Springer Science & Business Media: Berlin, Germany, 2010. [Google Scholar]
- Lappas, V.; Steyn, W.; Underwood, C. Torque amplification of control moment gyros. Electron. Lett. 2002, 38, 837–839. [Google Scholar] [CrossRef]
- Macek, W.M.; Davis, D., Jr. Rotation rate sensing with traveling—Wave ring lasers. Appl. Phys. Lett. 1963, 2, 67–68. [Google Scholar] [CrossRef]
- Culshaw, B.; Giles, I. Fibre Optic Gyroscopes; Fibre Optics’ 83; International Society for Optics and Photonics: London, UK, 1983; pp. 183–195. [Google Scholar]
- Izmailov, E.; Kolesnik, M.; Osipov, A.; Akimov, A. Hemispherical resonator gyro technology. Problems and possible ways of their solutions. In Proceedings of the 6th Saint Petersburg International Conference on Integrated Navigation Systems, St. Petersburg, Russia, 24 May 1999; pp. 24–26.
- Barbour, N.; Schmidt, G. Inertial sensor technology trends. IEEE. Sens. J. 2001, 1, 332–339. [Google Scholar] [CrossRef]
- Gad-el-Hak, M. The MEMS Handbook; CRC Press: Washington, DC, USA, 2001. [Google Scholar]
- Dell’Olio, F.; Tatoli, T.; Ciminelli, C.; Armenise, M. Recent advances in miniaturized optical gyroscopes. J. Eur. Opt. Soc. Rapid Publ. 2014, 9, 1–5. [Google Scholar] [CrossRef]
- Acar, C.; Shkel, A. Mems Vibratory Gyroscopes: Structural Approaches to Improve Robustness; Springer Science & Business Media: New York, NY, USA, 2008. [Google Scholar]
- Dell’Olio, F.; Indiveri, F.; Innone, F.; Ciminelli, C.; Armenise, M. Experimental countermeasures to reduce the backscattering noise in an InP hybrid optical gyroscope. In Proceedings of the Photonics Conference, 2014 Third Mediterranean, Trani, Italy, 7–9 May 2014; pp. 1–3.
- Held, K.; Barry, J. Precision optical pointing and tracking from spacecraft with vibrational noise. In Proceedings of the Optical Technologies for Communication Satellite Applications, Los Angeles, CA, USA, 21 January 1986; pp. 160–173.
- Iwata, T.; Kawahara, T.; Muranaka, N.; Laughlin, D.R. High-Bandwidth Attitude Determination Using Jitter Measurements and Optimal Filtering. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009; pp. 7349–7369.
- Liu, K.-C.A.; Blaurock, C.A.; Bourkland, K.L.; Morgenstern, W.M.; Maghami, P.G. Solar dynamics observatory on-orbit jitter testing, analysis, and mitigation plans. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Portland, OR, USA, 27 August 2011; pp. 730–739.
- Toyoshima, M.; Araki, K. In-orbit measurements of short term attitude and vibrational environment on the engineering test satellite using laser communication equipment. Opt. Eng. 2001, 40, 827–832. [Google Scholar]
- Sudey, J.; Schulman, J. In-orbit measurements of landsat-4 thematic mapper dynamic disturbances. Acta Astronaut. 1985, 12, 485–503. [Google Scholar] [CrossRef]
- Maeder, P.F. Magnetohydrodynamic Gyroscope. U.S. Patent 3026731, 27 March 1962. [Google Scholar]
- Laughlin, D. A Magnetohydrodynamic Angular Rate Sensor for Measuring Large Angular Rates. U.S. Patent US5067351, 26 November 1991. [Google Scholar]
- Laughlin, D.R. Active Magnetohydrodynamic Rate Sensor. U.S. Patent 5665912, 9 September 1997. [Google Scholar]
- Laughlin, D.R. MHD Sensor for Measuring Microradian Angular Rates and Displacements. U.S. Patent 6173611, 16 January 2001. [Google Scholar]
- Kang, Y.-S.; Moorhouse, K.; Bolte, J.H. Measurement of six degrees of freedom head kinematics in impact conditions employing six accelerometers and three angular rate sensors (6aω configuration). J. Biomech. Eng. Trans. 2011, 133. [Google Scholar] [CrossRef] [PubMed]
- Laughlin, D.R. A Magnetohydrodynamic Angular Motion Sensor for Anthropomorphic Test Device Instrumentation; SAE Technical Paper: Albuquerque, NM, USA, 1989. [Google Scholar]
- Martin, P.; Crandall, J.; Pilkey, W.; Chou, C.; Fileta, B. Measurement Techniques for Angular Velocity and Acceleration in an Impact Environment; SAE: Warrendale, PA, USA, 1997. [Google Scholar]
- Pittelkau, M.E. Sensors for Attitude Determination. Encycl. Aerosp. Eng. 2010. [Google Scholar] [CrossRef] [Green Version]
- Huculak, R.D.; Lankarani, H.M. Use of euler parameters for the evaluation of head trajectory from angular rate sensor and accelerometer data in aircraft seat certification testing. Int. J. Crashworthiness 2013, 18, 174–182. [Google Scholar] [CrossRef]
- Eckelkamp-Baker, D.; Sebesta, H.R.; Burkhard, K. Magnetohydrodynamic Inertial Reference System. International. In Proceedings of the Tracking, and Pointing XIV, Orlando, FL, USA, 24 April 2000; pp. 99–110.
- Tan, C.-W.; Mostov, K.; Varaiya, P. Feasibility of a Gyroscope-Free Inertial Navigation System for Tracking Rigid Body Motion; California Partners for Advanced Transit and Highways (PATH): Berkeley, CA, USA, 2000. [Google Scholar]
- Laughlin, D.R.; Hawes, M.A.; Blackburn, J.P.; Sebesta, H.R. Low-Cost Alternative to Gyroscopes for Tracking-System Stabilization. In Proceedings of the Acquisition, Tracking, and Pointing IV, Orlando, FL, USA, 16–20 April 1990; pp. 2–13.
- Laughlin, D.; Sebesta, H.; Eckelkamp-Baker, D. A dual function magnetohydrodynamic (MHD) device for angular motion measurement and control. Adv. Astronaut. Sci. 2002, 111, 335–347. [Google Scholar]
- Pinney, C.; Hawes, M.A.; Blackburn, J. A cost-effective inertial motion sensor for short-duration autonomous navigation. In Proceeding of the Position Location and Navigation Symposium, Las Vegas, NV, USA, 11–15 April 1994; pp. 591–597.
- Merkle, A.; Wing, I.; Szcepanowski, R.; McGee, B.; Voo, L.; Kleinberger, M. Evaluation of Angular Rate Sensor Technologies for Assessment of Rear Impact Occupant Responses; John Hopkins University Applied Physics Laboratory for NHTSA: Baltimore, MD, USA, 2007. [Google Scholar]
- Xu, M.; Li, X.; Wu, T.; Chen, C.; Ji, Y. Error analysis of theoretical model of angular velocity sensor based on magnetohydrodynamics at low frequency. Sens. Actuators A Phys. 2015, 226, 116–125. [Google Scholar] [CrossRef]
- Klinich, K.D.; Reed, M.P.; Ebert, S.M.; Rupp, J.D. Kinematics of pediatric crash dummies seated on vehicle seats with realistic belt geometry. Traffic Inj. Prev. 2014, 15, 866–874. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Zhang, W.; Zhang, F.; Wang, B. A new MEMS gyroscope used for single-channel damping. Sensors 2015, 15, 10146–10165. [Google Scholar] [CrossRef] [PubMed]
- Su, Z.; Liu, N.; Li, Q. Error model and compensation of bell-shaped vibratory gyro. Sensors 2015, 15, 23684–23705. [Google Scholar] [CrossRef] [PubMed]
- Jang, J.; Lee, S.S. Theoretical and experimental study of MHD (magnetohydrodynamic) micropump. Sens. Actuators A Phys. 2000, 80, 84–89. [Google Scholar] [CrossRef]
- Kim, C.T.; Lee, J. Design, fabrication, and testing of a DC MHD micropump fabricated on photosensitive glass. Chem. Eng. Sci. 2014, 117, 210–216. [Google Scholar]
- Liu, P.; Zhu, R.; Que, R. A flexible flow sensor system and its characteristics for fluid mechanics measurements. Sensors 2009, 9, 9533–9543. [Google Scholar] [CrossRef] [PubMed]
- Davidson, P.A. An Introduction to Magnetohydrodynamics; Cambridge University Press: New York, NY, USA, 2001. [Google Scholar]
- Muller, U.; Buhler, L. Magnetohydrodynamics in Channels and Containers; Springer: New York, NY, USA, 2001. [Google Scholar]
- Zhao, Y.; Zikanov, O.; Krasnov, D. Instability of magnetohydrodynamic flow in an annular channel at high hartmann number. Phys. Fluids 2011, 23. [Google Scholar] [CrossRef]
- Yazdi, M.H.; Abdullah, S.; Hashim, I.; Sopian, K. Entropy generation analysis of open parallel microchannels embedded within a permeable continuous moving surface: Application to magnetohydrodynamics (MHD). Entropy 2011, 14, 1–23. [Google Scholar] [CrossRef]
- Das, C.; Wang, G.; Payne, F. Some practical applications of magnetohydrodynamic pumping. Sens. Actuators A Phys. 2013, 201, 43–48. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, Y.; Li, X.; Wu, T.; Chen, C. Theoretical and Experimental Study of Radial Velocity Generation for Extending Bandwidth of Magnetohydrodynamic Angular Rate Sensor at Low Frequency. Sensors 2015, 15, 31606-31619. https://doi.org/10.3390/s151229869
Ji Y, Li X, Wu T, Chen C. Theoretical and Experimental Study of Radial Velocity Generation for Extending Bandwidth of Magnetohydrodynamic Angular Rate Sensor at Low Frequency. Sensors. 2015; 15(12):31606-31619. https://doi.org/10.3390/s151229869
Chicago/Turabian StyleJi, Yue, Xingfei Li, Tengfei Wu, and Cheng Chen. 2015. "Theoretical and Experimental Study of Radial Velocity Generation for Extending Bandwidth of Magnetohydrodynamic Angular Rate Sensor at Low Frequency" Sensors 15, no. 12: 31606-31619. https://doi.org/10.3390/s151229869