
Labeled RFS-Based Track-Before-Detect for Multiple Maneuvering Targets in the Infrared Focal Plane Array

Abstract
:1. Introduction
2. Background
2.1. Notation
2.2. Labeled RFS
2.3. Labeled Multi-Bernoulli RFS
3. The Multi-Model LMB TBD
3.1. Target and Measurement Models
3.2. Multi-Model LMB Filter for TBD
3.3. Multi-Model LMB Smoother for TBD
3.4. Sequential Monte Carlo Implementation
4. Results
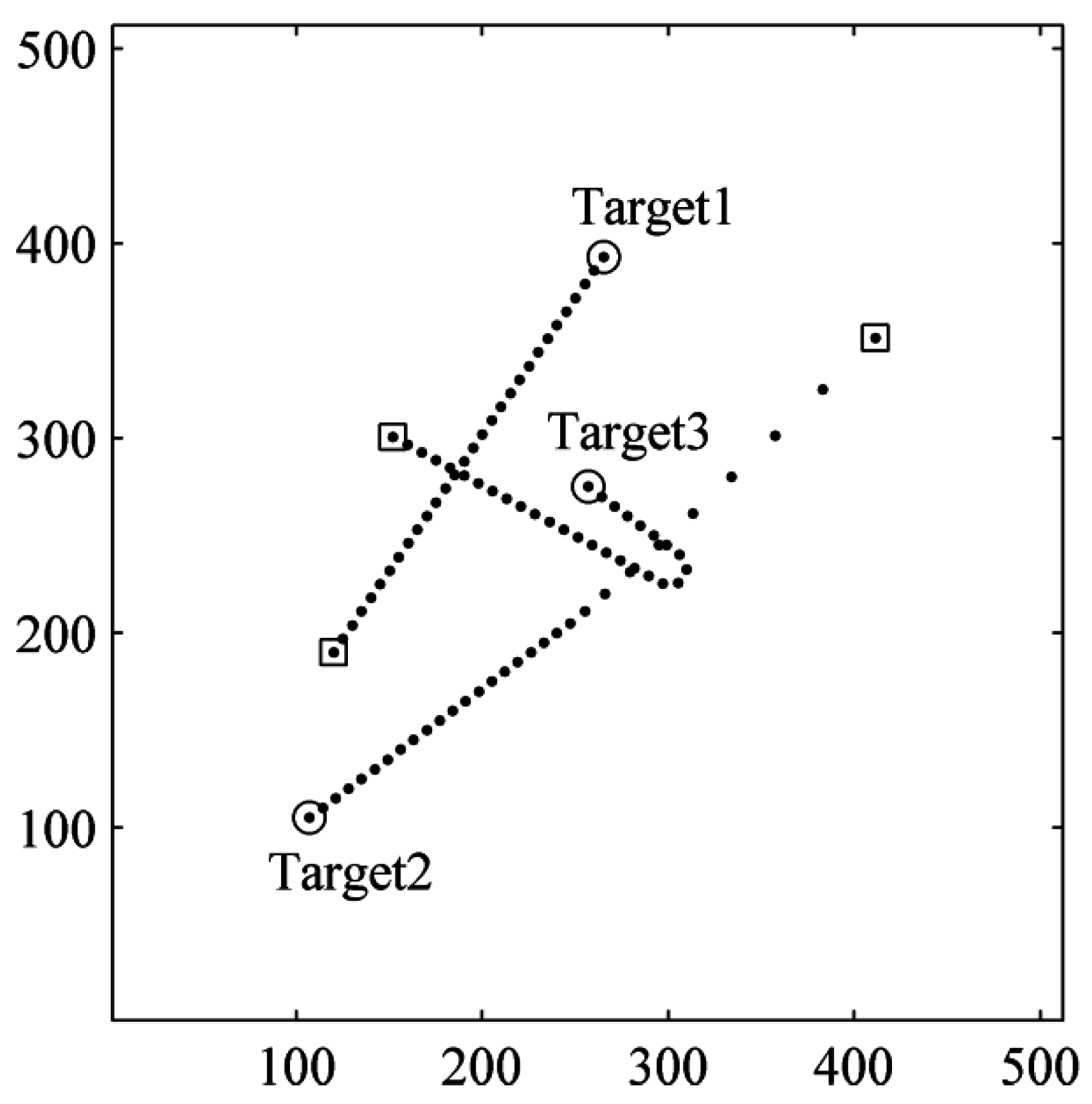
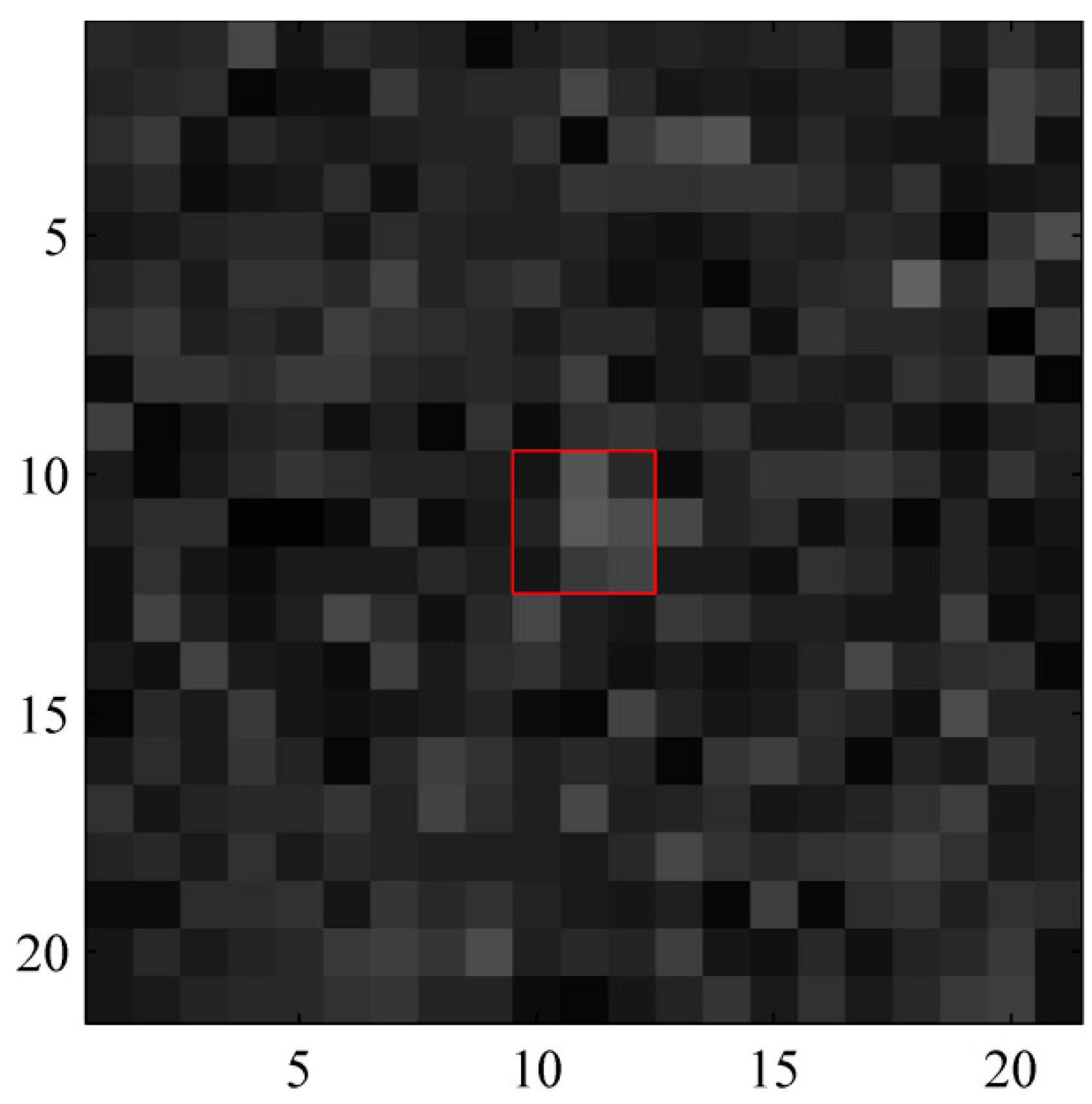
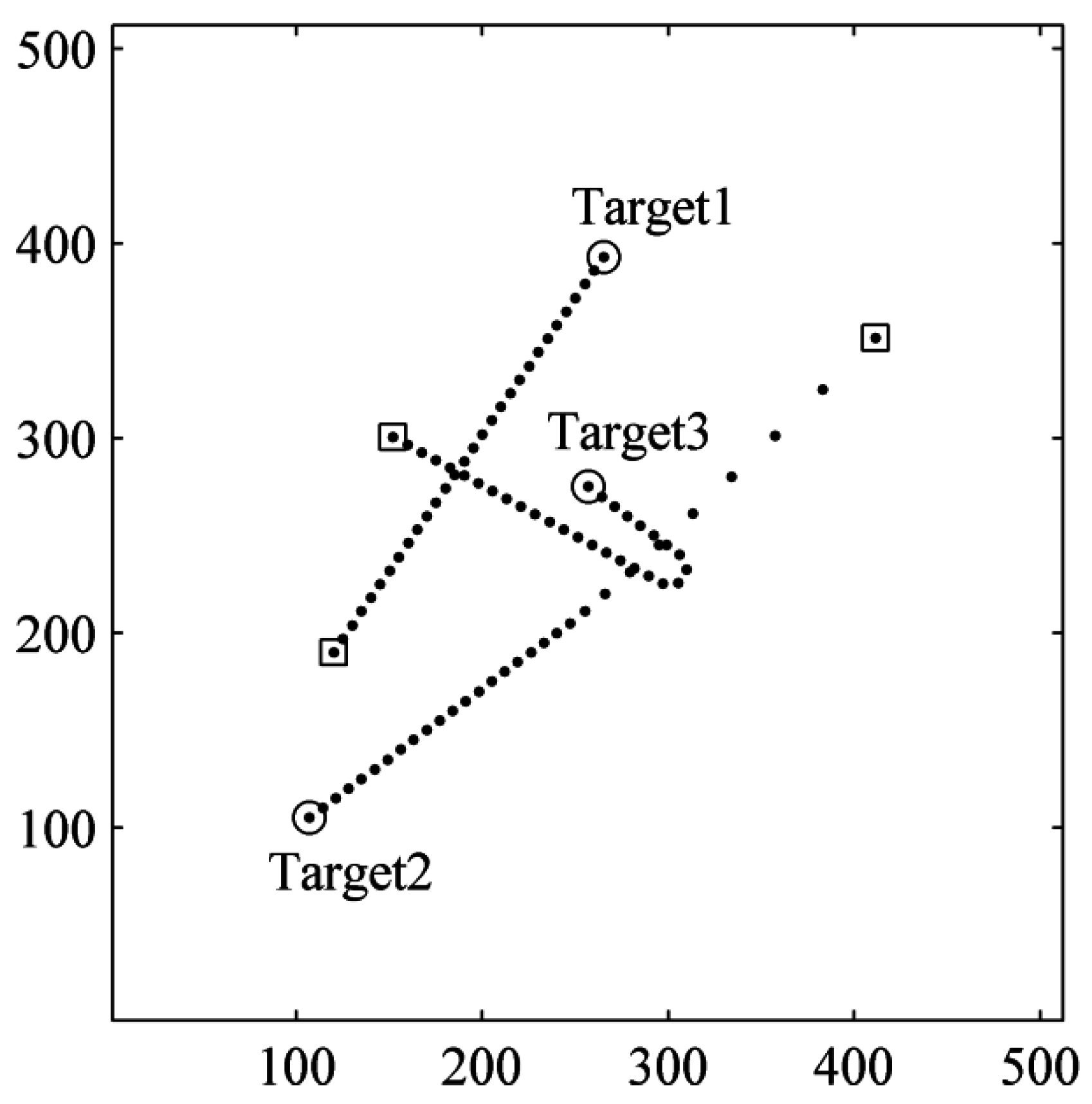
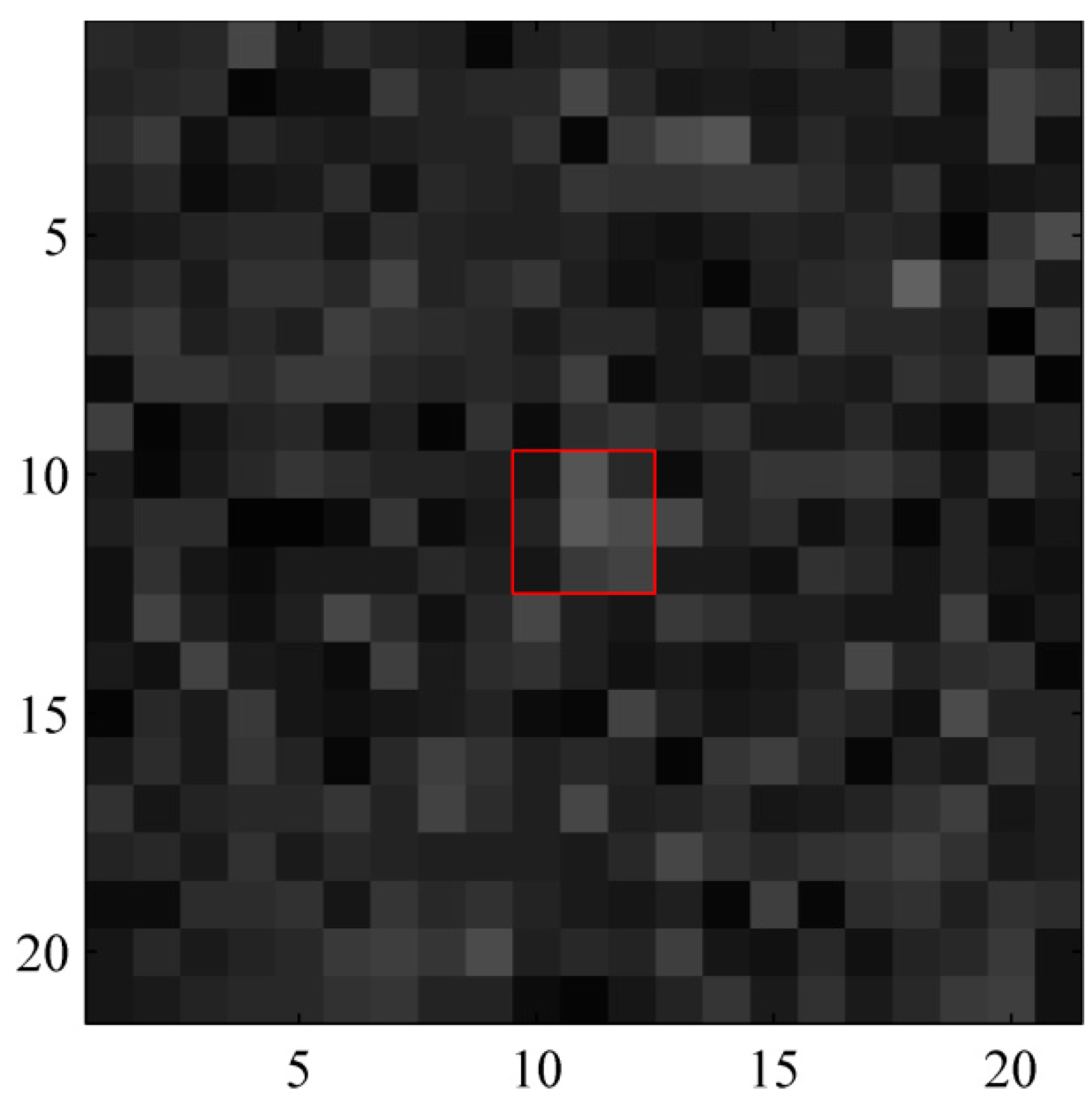
4.1. Scenario Description

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | |||||||
|---|---|---|---|---|---|---|---|
| Value | 0.03 | 0.99 | 1200 | 1000 | 3 | 10−6 | 0.5 |
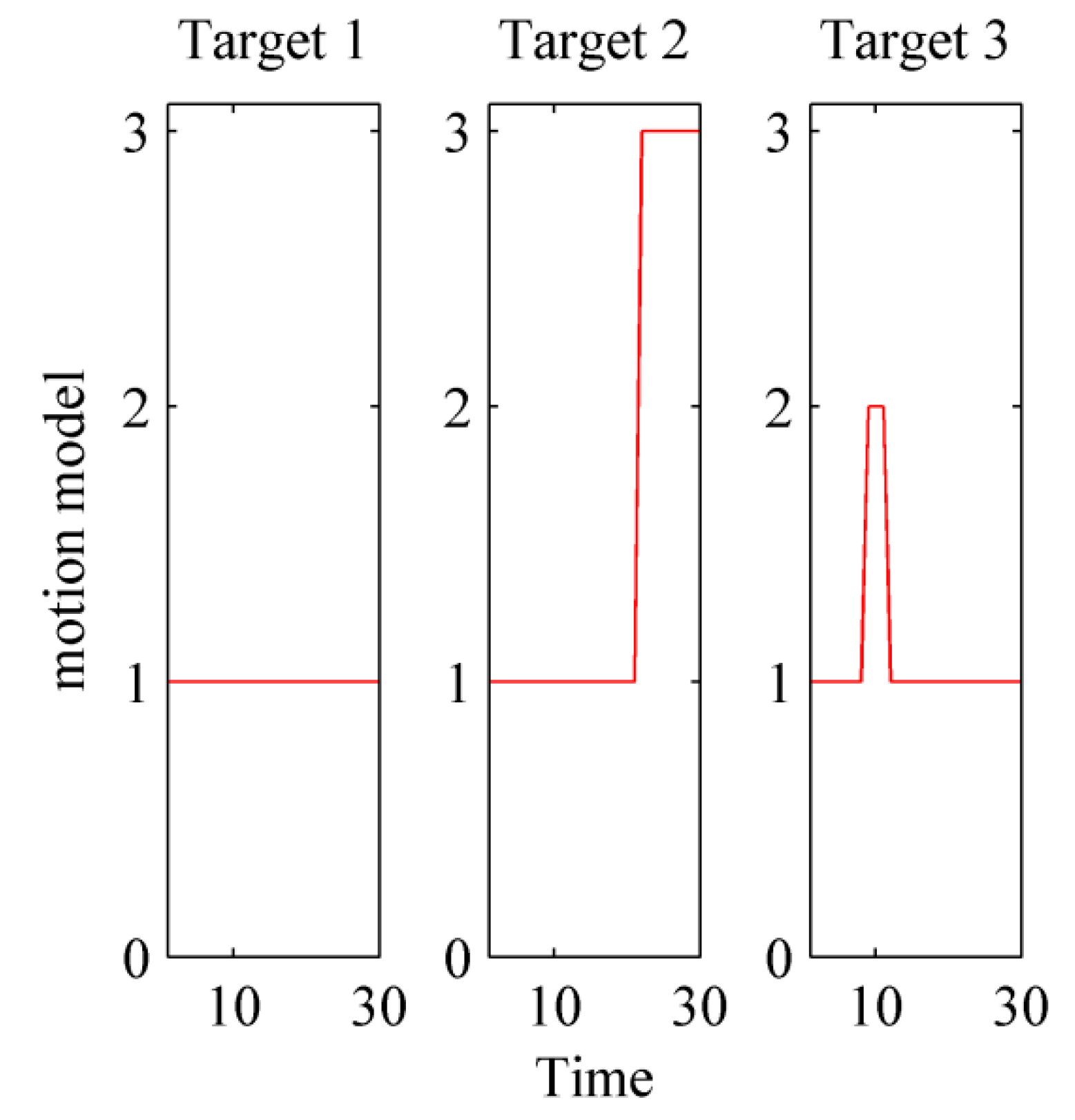
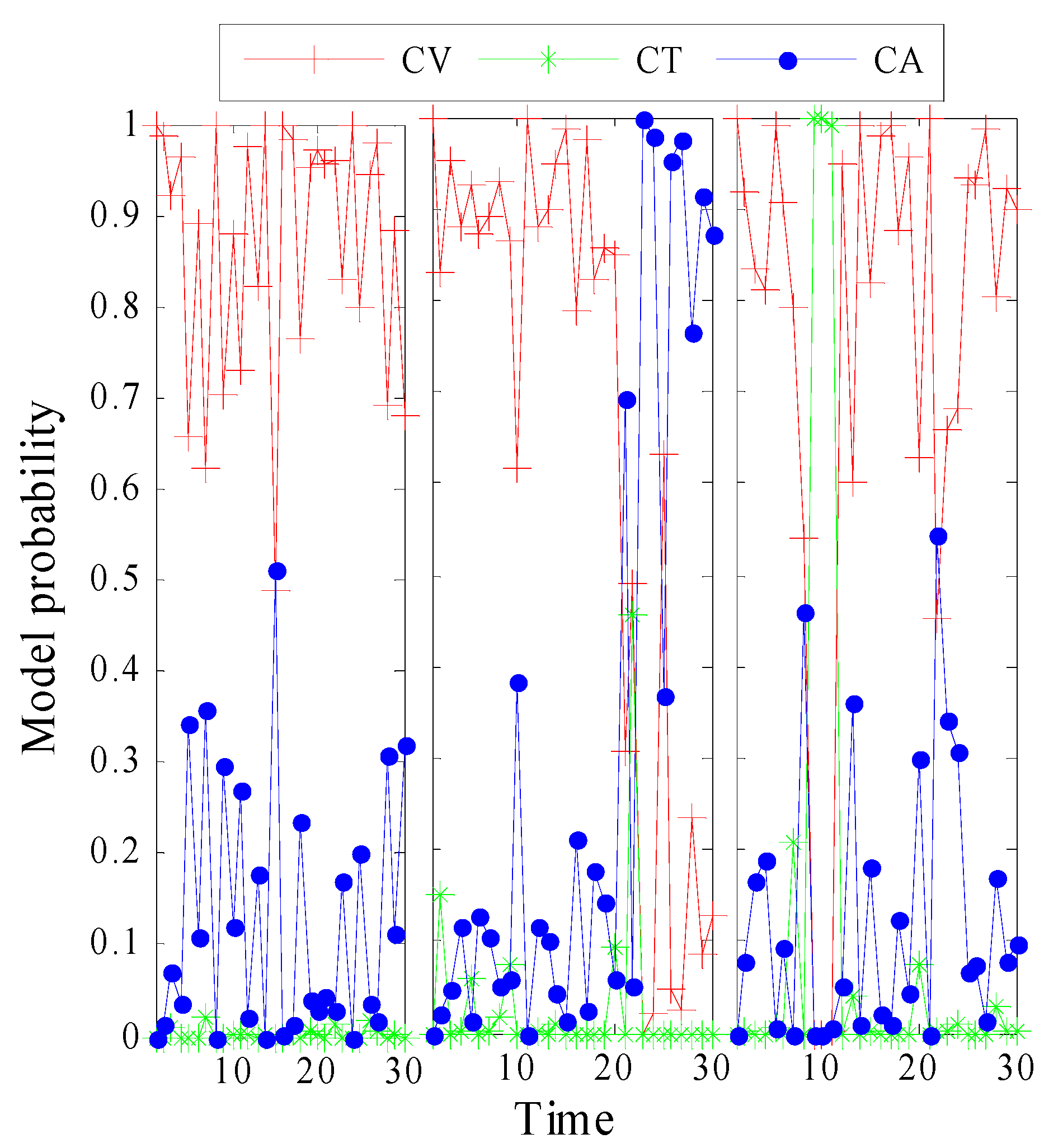
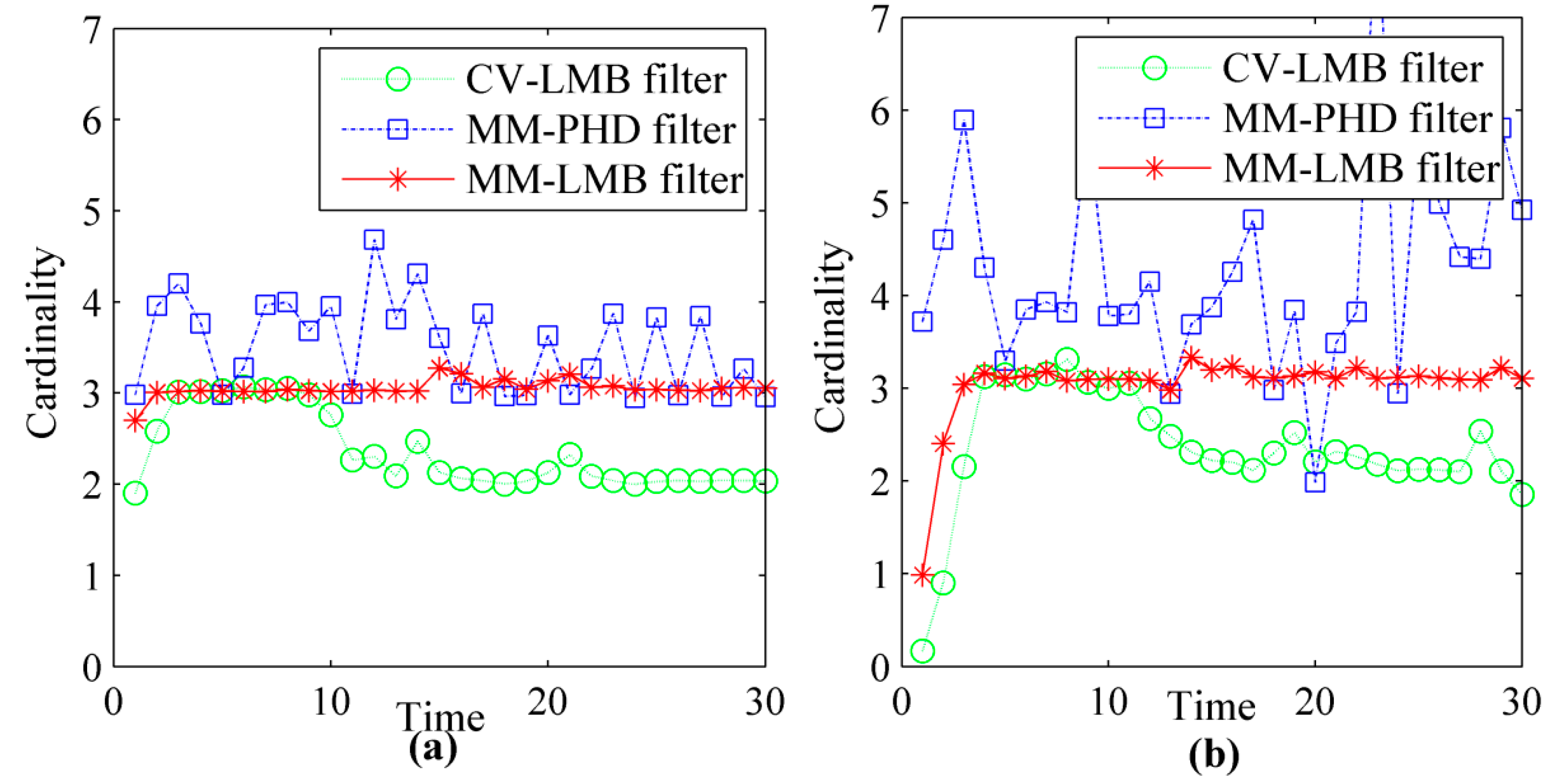
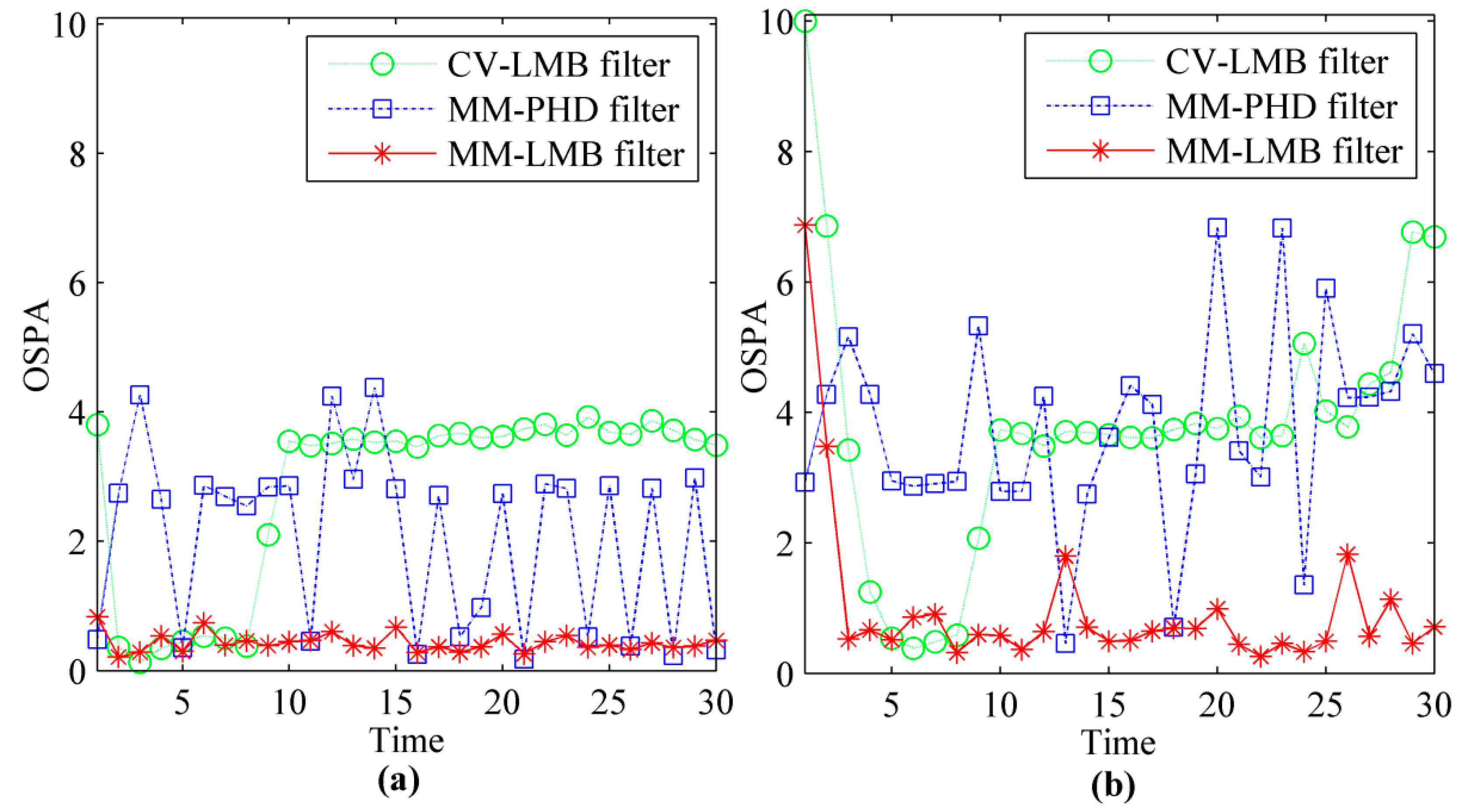
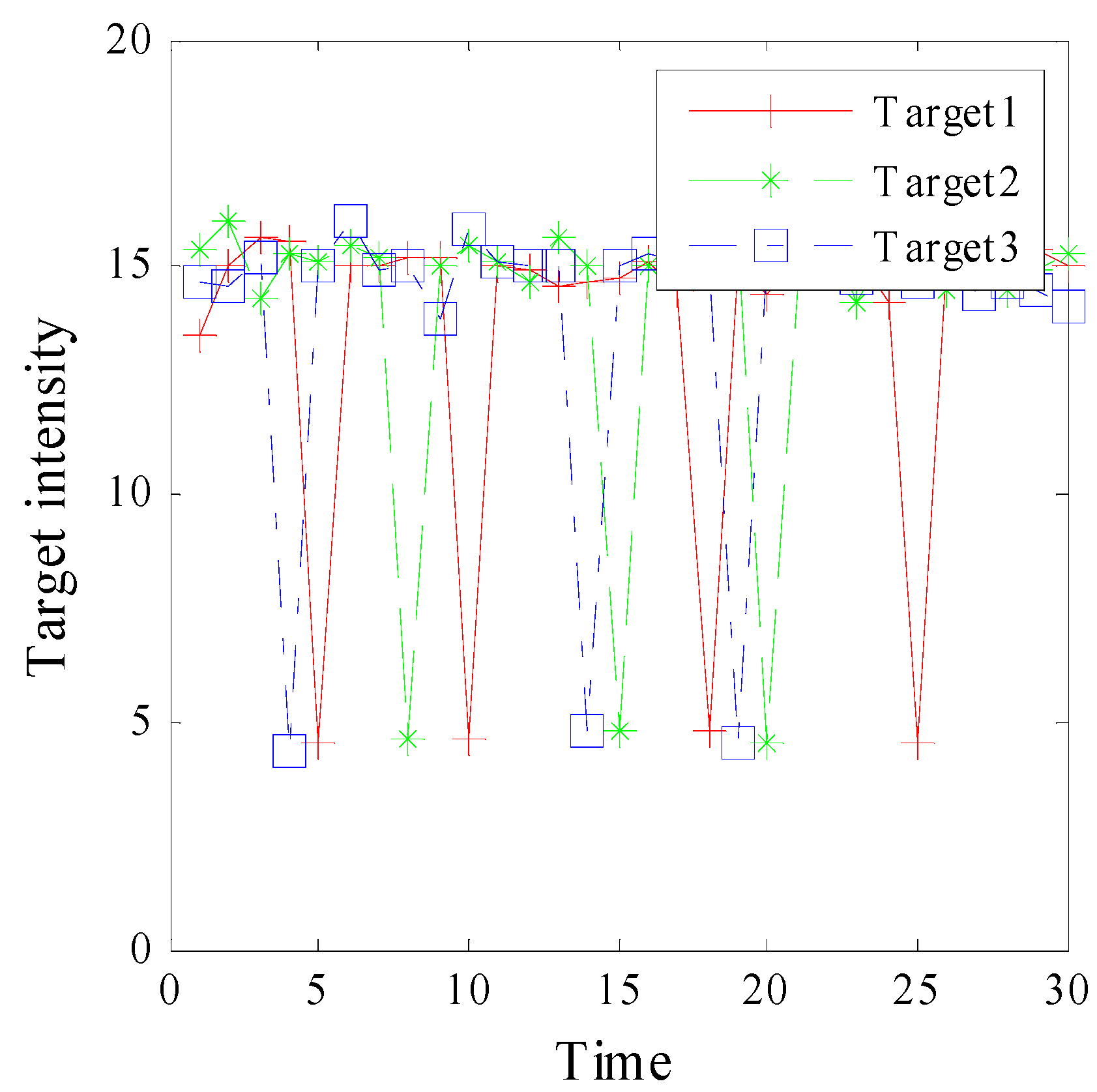
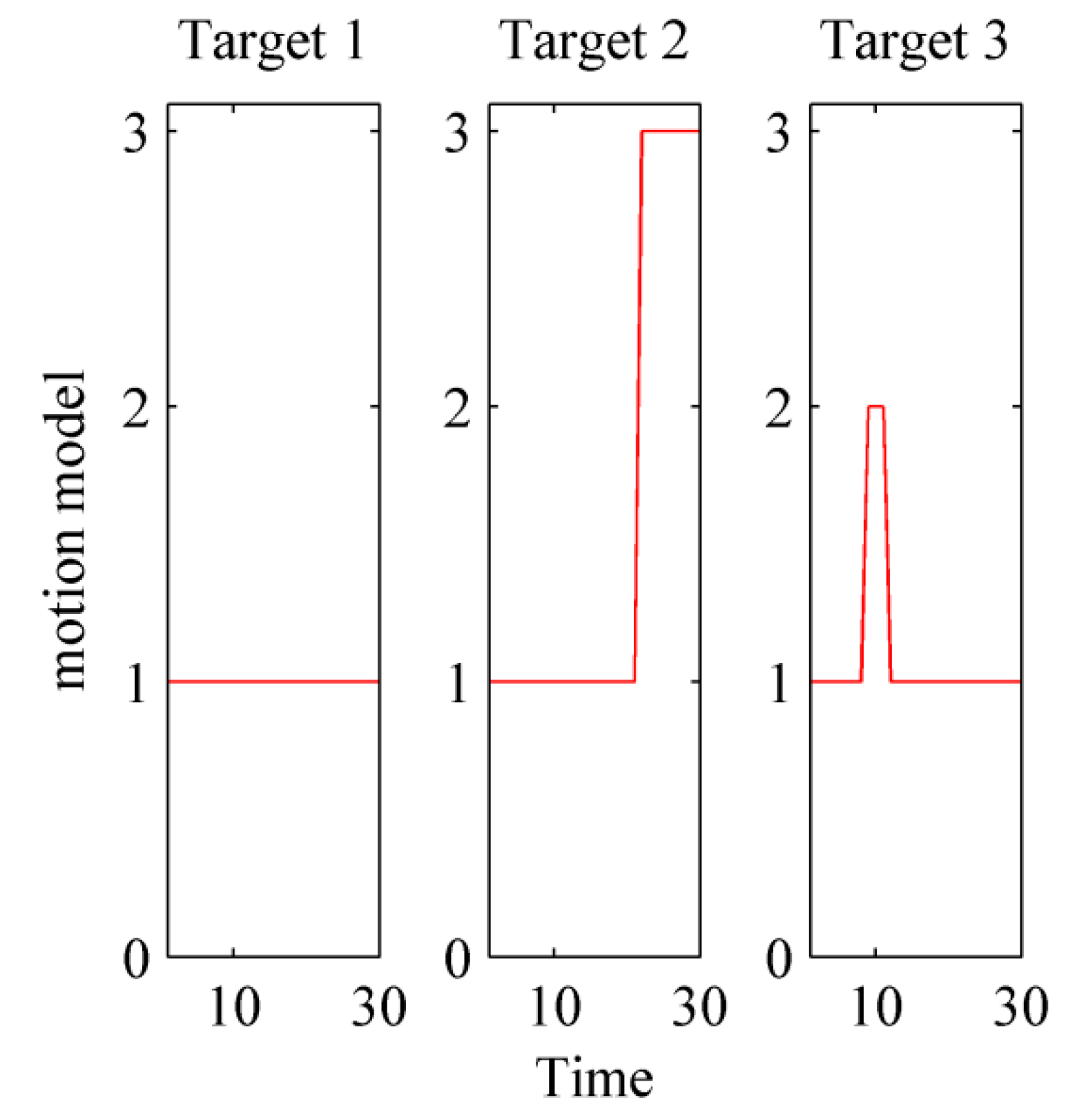
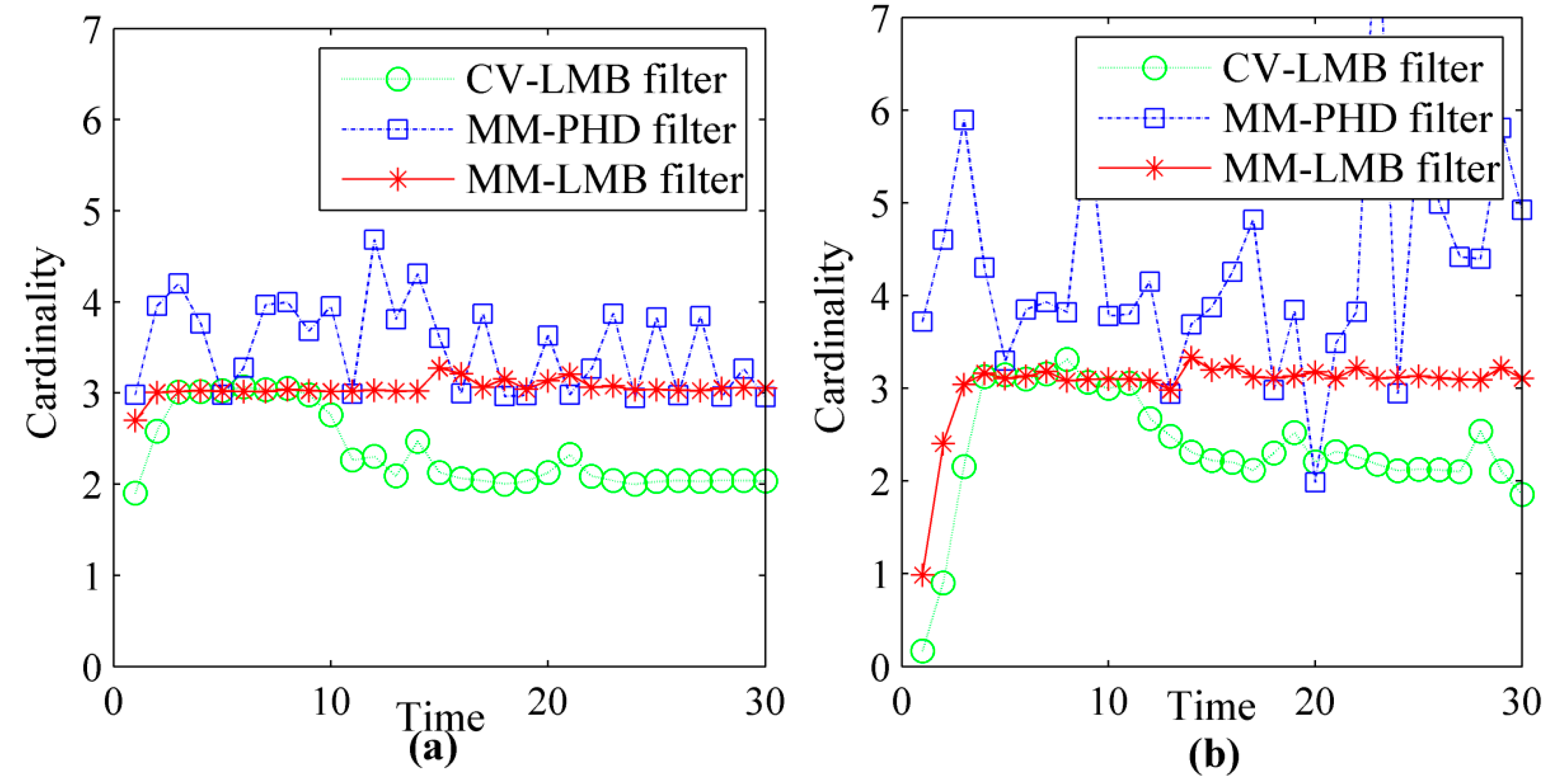
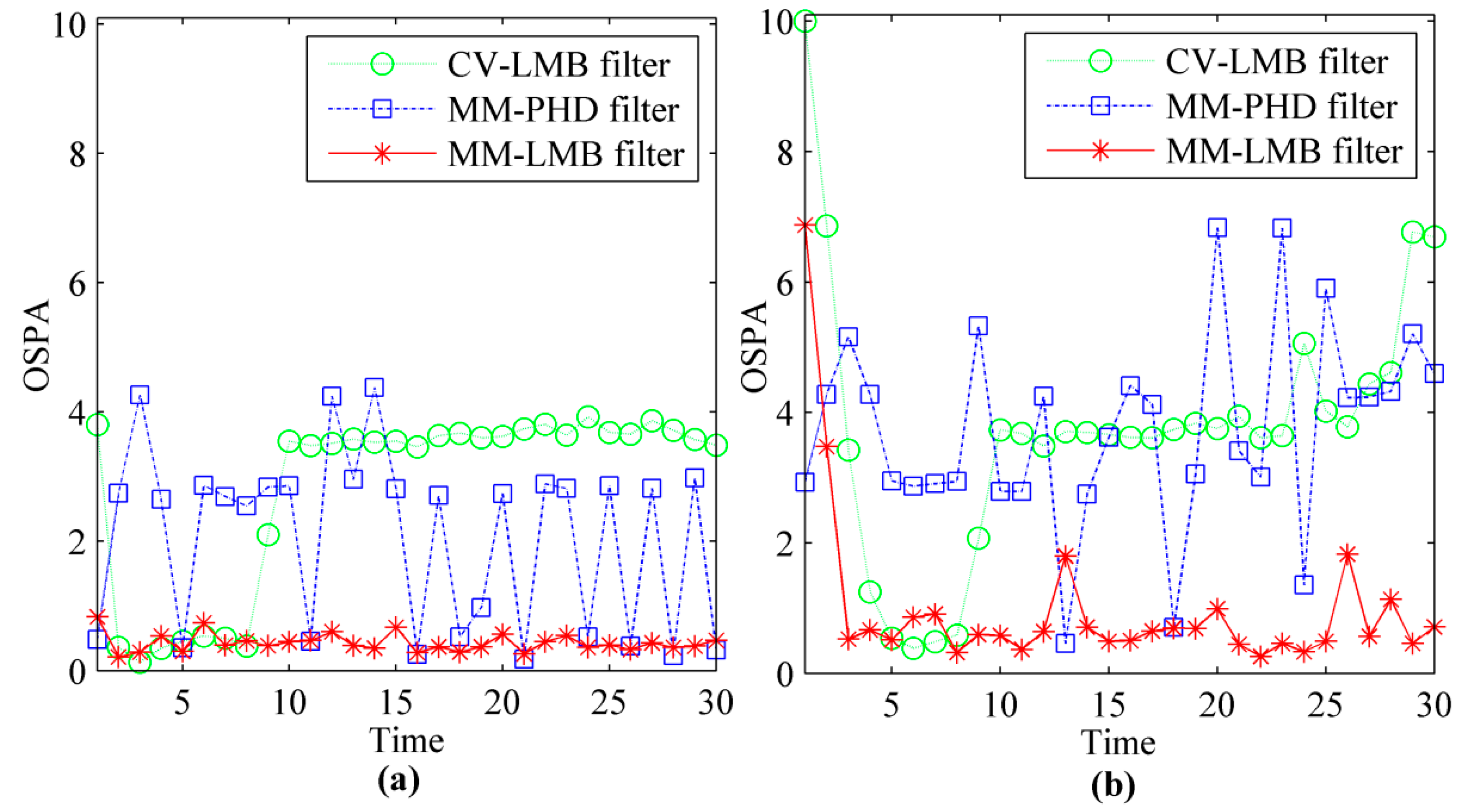
4.2. Multiple Maneuvering Target TBD Experiment


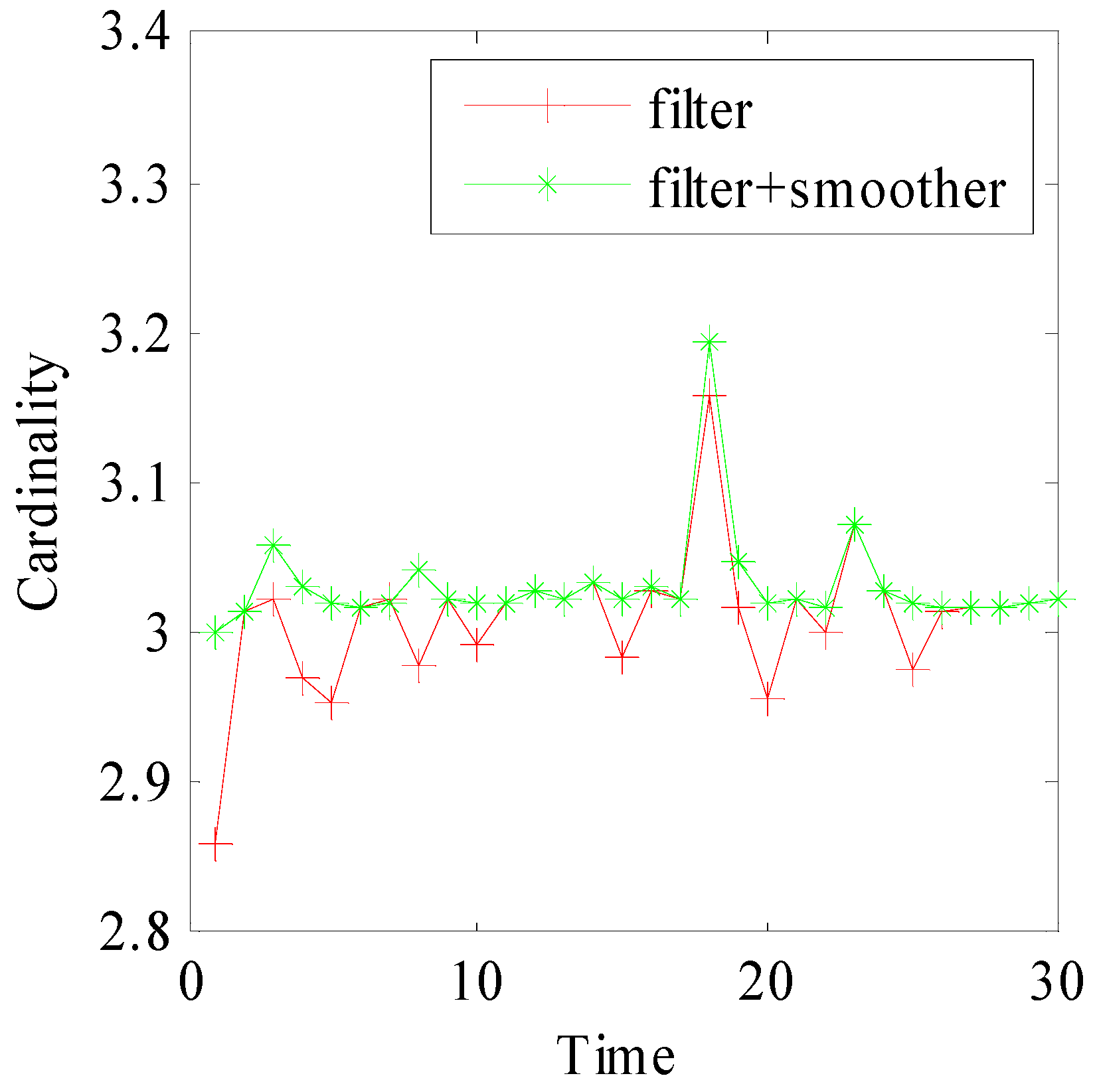
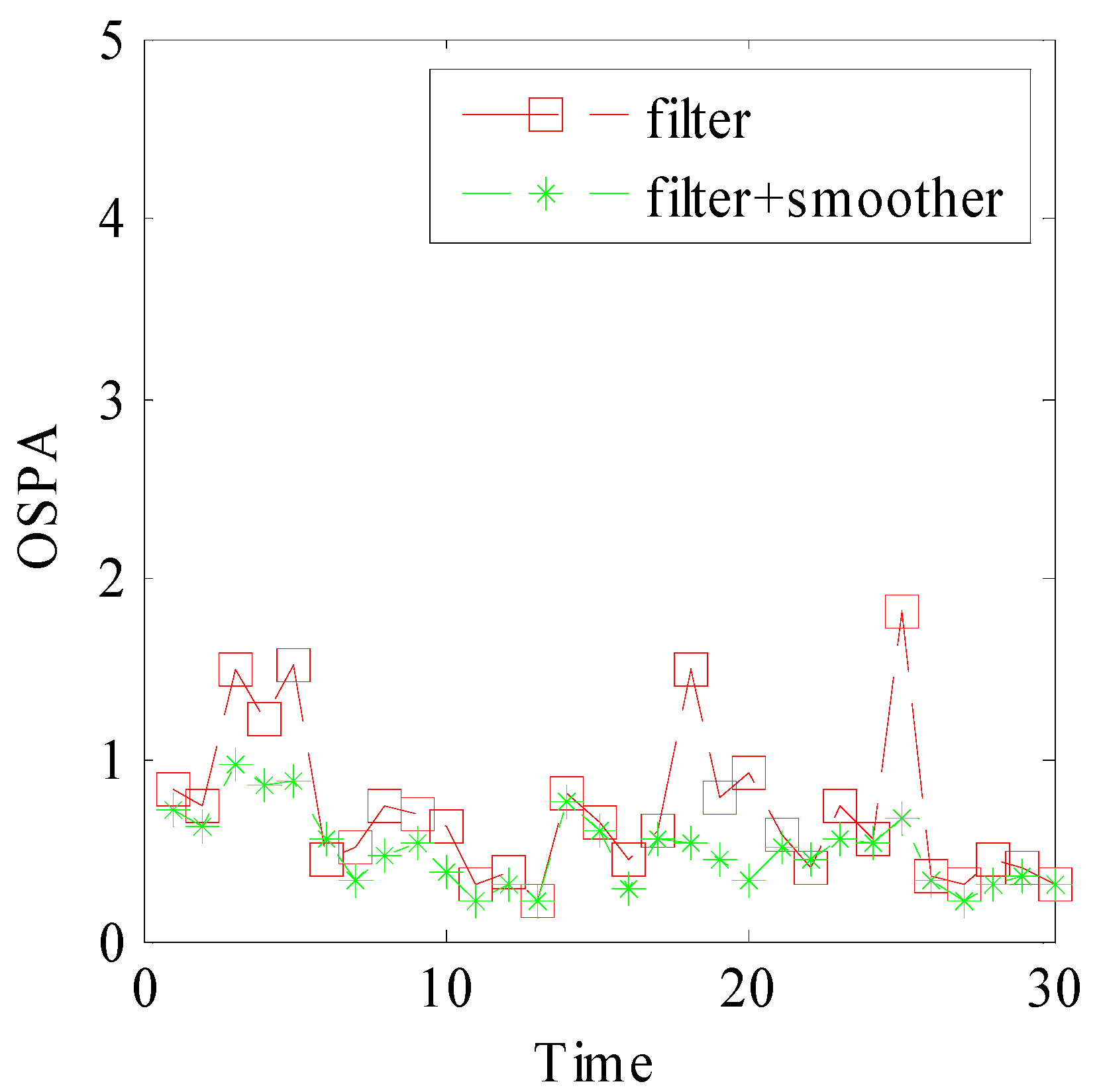
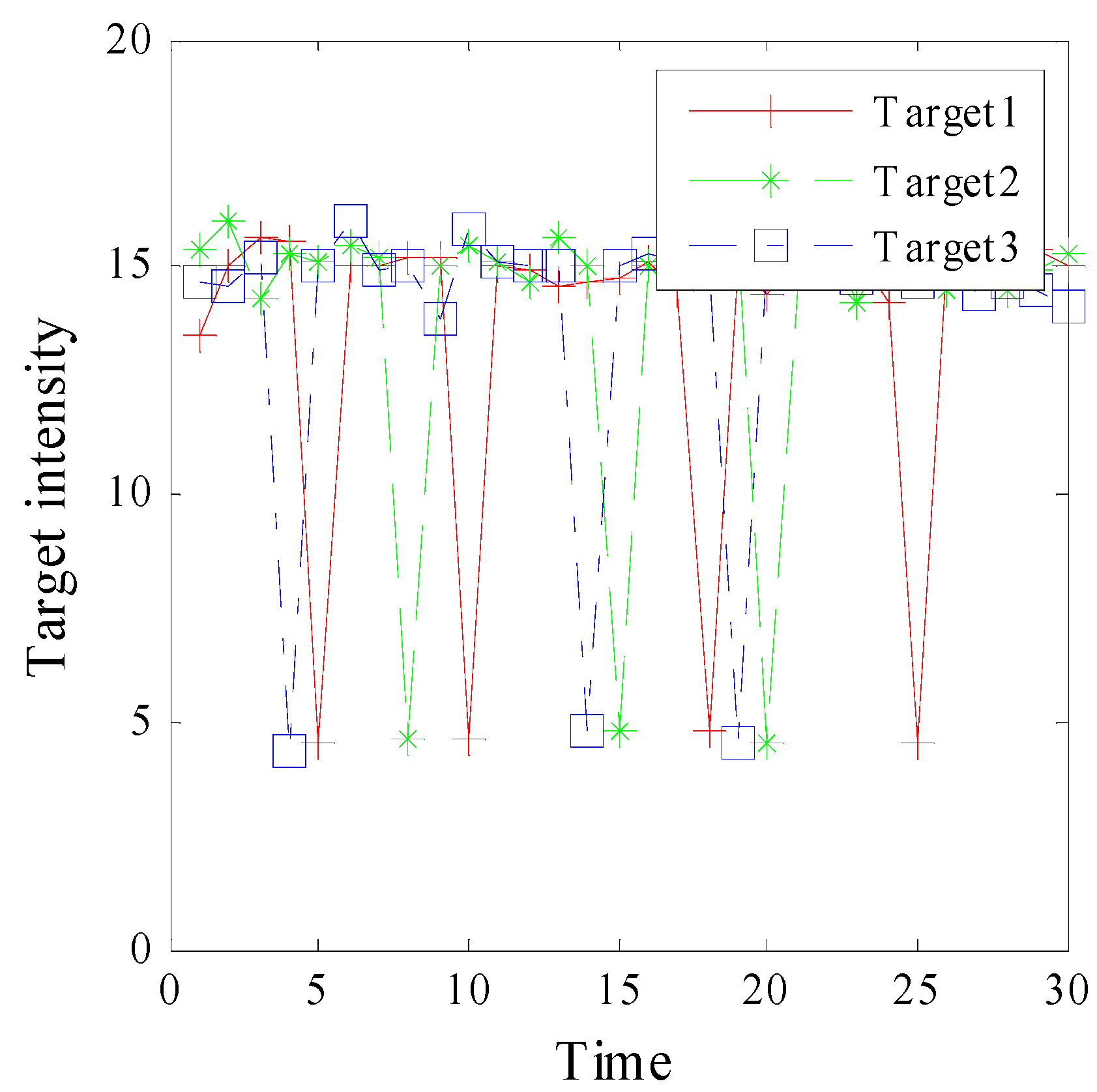
4.3. Backward Smoothing Experiment
| Target No. | ||||
|---|---|---|---|---|
| 1 | 16 | (1,1) | 0.8 | 0.98 |
| 26 | (1,1) | 0.8 | 0.99 | |
| 2 | 11 | (1,1) | 0.8 | 0.94 |
| 22 | (1,3) | 0.1 | 0.98 | |
| 3 | 9 | (1,2) | 0.1 | 0.80 |
| 12 | (2,1) | 0.15 | 0.85 |


5. Conclusions
Author Contributions
Conflicts of Interest
References
- Tian, Y.; Gao, K.; Liu, Y.; Han, L. A novel track-before-detect algorithm based on optimal nonlinear filtering for detecting and tracking infrared dim target. Proc. SPIE 2015, 9622, 0U–0U8. [Google Scholar]
- Sanna, A.; Lamberti, F. Advances in Target Detection and Tracking in Forward-Looking Infrared (FLIR) Imagery. Sensors 2014, 14, 20297–20303. [Google Scholar] [CrossRef] [PubMed]
- Xu, Y.; Xu, H.; An, W.; Xu, D. FISST Based Method for Multi-Target Tracking in the Image Plane of Optical Sensors. Sensors 2012, 12, 2920–2934. [Google Scholar] [CrossRef] [PubMed]
- Kim, S. High-Speed Incoming Infrared Target Detection by Fusion of Spatial and Temporal Detectors. Sensors 2015, 15, 7267–7293. [Google Scholar] [CrossRef] [PubMed]
- Lin, Z.; Zhou, Y.; An, W. Improved multi-target track-before-detect using probability hypothesis density filter. J. Infrared Millim. Waves 2015, 31, 475–478. [Google Scholar] [CrossRef]
- Long, Y.L.; Xu, H.; An, W.; Liu, L. Track-Before-Detect for Infrared Maneuvering Dim Multi-Target via MM-PHD. Chin. J. Aeronaut. 2012, 25, 252–261. [Google Scholar] [CrossRef]
- Kim, S. Sea-Based Infrared Scene Interpretation by Background Type Classification and Coastal Region Detection for Small Target Detection. Sensors 2015, 15, 24487–24513. [Google Scholar] [CrossRef] [PubMed]
- Dong, X.; Huang, X.; Zheng, Y.; Shen, L.; Bai, S. Infrared Dim and Small Target Detecting and Tracking Method Inspired by Human Visual System. Infrared Phys. Technol. 2014, 62, 100–109. [Google Scholar] [CrossRef]
- Yilmaz, A.; Shafique, K.; Shah, M. Target tracking in airborne forward looking infrared imagery. Image Vis. Comput. 2003, 21, 623–635. [Google Scholar] [CrossRef]
- Zhang, B.; Zhang, T.; Cao, Z.; Zhang, K. Fast new small-target detection algorithm based on a modified partial differential equation in infrared clutter. Opt. Eng. 2007, 46, 106401. [Google Scholar] [CrossRef]
- Wang, X.; Lv, G.; Xu, L. Infrared dim target detection based on visual attention. Infrared Phys. Technol. 2012, 55, 513–521. [Google Scholar] [CrossRef]
- Wong, S.; Vo, B.T.; Papi, F. Bernoulli Forward-Backward Smoothing for Track-Before-Detect. IEEE Signal Process. Lett. 2014, 21, 727–731. [Google Scholar] [CrossRef]
- Lund, J.; Rudemo, M. Models for point processes observed with noise. Biometrika 2000, 87, 235–249. [Google Scholar] [CrossRef]
- Salmond, D.J.; Birch, H. A particle filter for track-before-detect. Proc. Am. Control Conf. 2001, 5, 3755–3760. [Google Scholar]
- Boers, Y.; Driessen, J.N. Particle filter based detection for tracking. Proc. Am. Control Conf. 2001, 6, 4393–4397. [Google Scholar]
- Deng, X.; Pi, Y.; Morelande, M. Track-before-detect procedures for low pulse repetition frequency surveillance radars. IET Radar Navig. 2011, 5, 65–73. [Google Scholar] [CrossRef]
- Jones, B.A.; Bryant, D.S.; Vo, B.T.; Vo, B.N. Challenges of Multi-Target Tracking for Space Situational Awareness. In Proceedings of the 18th International Conference on Information Fusion, Washington, DC, USA, 6–9 July 2015.
- Saini, V.; Hablani, H.B. Air-to-air tracking of a maneuvering target with gimbaled radar. J. Guid. Control Dyn. 2015, 1–13. [Google Scholar] [CrossRef]
- Zhan, R.H.; Lu, D.W.; Zhang, J. Maneuvering Targets Track-Before-Detect Using Multiple-Model Multi-Bernoulli Filtering. In Proceedings of the 2013 International Conference on Information Technology and Applications, Chengdu, China, 16–17 November 2013.
- Mahler, R.P.S. Multitarget Bayes filtering via first-order multitarget moments. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1152–1178. [Google Scholar] [CrossRef]
- Mahler, P.R.S. PHD filters of higher order in target number. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1523–1543. [Google Scholar] [CrossRef]
- Mahler, R.P.S. Statistical Multisource Multitarget Information Fusion; Artech House: London, UK, 2007. [Google Scholar]
- Vo, B.T.; Vo, B.N.; Cantoni, A. The Cardinality Balanced Multi-Target Multi-Bernoulli Filter and its Implementations. IEEE Trans. Signal Process. 2009, 57, 409–423. [Google Scholar]
- Maher, R. A survey of PHD filter and CPHD filter implementations. Proc. SPIE 2007, 6567, 65670O:1–65670O:12. [Google Scholar]
- Vo, B.T.; Vo, B.N. Labeled random finite sets and multi-object conjugate priors. IEEE Trans. Signal Process. 2013, 61, 3460–3475. [Google Scholar] [CrossRef]
- Vo, B.N.; Vo, B.T.; Phung, D. Labeled Random Finite Sets and the Bayes Multi-Target Tracking Filter. IEEE Trans. Signal Process. 2014, 62, 6554–6567. [Google Scholar] [CrossRef]
- Reuter, S.; Vo, B.T.; Vo, B.N.; Dietmayer, K. The Labeled Multi-Bernoulli Filter. IEEE Trans. Signal Process. 2014, 62, 3246–3260. [Google Scholar]
- Papi, F.; Vo, B.N.; Vo, B.T.; Fantacci, C.; Beard, M. Generalized Labeled Multi Bernoulli Approximation of Multi-Object Densities. IEEE Trans. Signal Process. 2015, 63, 5487–5497. [Google Scholar] [CrossRef]
- Tharindu, R.; Amirali, K.G.; Reza, H.; Alireza, B. Labeled Multi-Bernoulli Track-Before-Detect for Multi-Target Tracking in Video. In Proceedings of the 18th International Conference on Information Fusion, Washington, DC, USA, 6–9 July 2015.
- Li, X.R.; Jilkov, V.P. Survey of maneuvering target tracking-part V: Multiple-model methods. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1255–1321. [Google Scholar]
- Reuter, S.; Scheel, A.; Dietmayer, K. The Multiple Model Labeled Multi-Bernoulli Filter. In Proceedings of the 18th International Conference on Information Fusion, Washington, DC, USA, 6–9 July 2015.
- Vo, B.T.; Clark, D.; Vo, B.N.; Ristic, B. Bernoulli forward-backward smoothing for joint target detection and tracking. IEEE Trans. Signal Process. 2011, 59, 4473–4477. [Google Scholar] [CrossRef]
- Vo, B.N.; Singh, S.; Doucet, A. Sequential Monte Carlo Methods for Multi-Target Filtering with Random Finite Sets. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1224–1245. [Google Scholar]
- Punithakumar, K.; Kirubarajan, T.; Sinha, A. A Sequential Monte Carlo Probability Hypothesis Density Algorithm for Multitarget Track-Before-Detect. Proc. Signal Data Process. Small Targets 2005, 5913, 1–8. [Google Scholar]
- Reuter, S.; Vo, B.T.; Vo, B.N.; Dietmayer, K. Multi-Object Tracking Using Labeled Multi-Bernoulli Random Finite Sets. In Proceedings of the 17th International Conference on Information Fusion, Salamanca, Spain, 7–10 July 2014.
- Xiong, Y.; Peng, J.; Ding, M.; Xue, D. An extended track-before-detect algorithm for infrared target detection. IEEE Trans. Aerosp. Electron. Syst. 1997, 33, 1087–1092. [Google Scholar] [CrossRef]
- Deepa, K.; Dimitrios, H. Blind image deconvolution. IEEE Signal Process. Mag. 1996, 13, 43–64. [Google Scholar]
- Vo, B.N.; Vo, B.T.; Pham, N.; Suter, D. Joint Detection and Estimation of Multiple Objects from Image Observations. IEEE Trans. Signal Process. 2010, 58, 5129–5141. [Google Scholar] [CrossRef]
- Li, X.R.; JiKov, V.P. Survey of maneuvering target tracking. Part I. dynamic models. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1333–1364. [Google Scholar]
- Schuhmacher, D.; Vo, B.T.; Vo, B.N. A Consistent Metric for Performance Evaluation of Multi-Object Filters. IEEE Trans. Signal Process. 2008, 56, 3447–3457. [Google Scholar] [CrossRef]
- Punithakumar, K.; Kirubarajan, T.; Sinha, A. Multiple model probability hypothesis density filter for tracking maneuvering targets. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 87–98. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Li, J.; Zhou, Y. Labeled RFS-Based Track-Before-Detect for Multiple Maneuvering Targets in the Infrared Focal Plane Array. Sensors 2015, 15, 30839-30855. https://doi.org/10.3390/s151229829
Li M, Li J, Zhou Y. Labeled RFS-Based Track-Before-Detect for Multiple Maneuvering Targets in the Infrared Focal Plane Array. Sensors. 2015; 15(12):30839-30855. https://doi.org/10.3390/s151229829
Chicago/Turabian StyleLi, Miao, Jun Li, and Yiyu Zhou. 2015. "Labeled RFS-Based Track-Before-Detect for Multiple Maneuvering Targets in the Infrared Focal Plane Array" Sensors 15, no. 12: 30839-30855. https://doi.org/10.3390/s151229829