
Multi-Target Tracking Based on Multi-Bernoulli Filter with Amplitude for Unknown Clutter Rate

Abstract
:1. Introduction
- We derive novel prediction and update equations which augment the state and measurement spaces with the amplitude information. In radar sensors, measurements not only include the object’s position, but also contain information about the signal’s amplitude. The signal amplitude from an actual target is typically stronger than that of clutter. Therefore, it provides valuable information, which is useful to determine whether the measurement is from an actual target or from clutter.
- We adaptively generate the new-born object RFSs using the measurements so as to eliminate reliance of the prior new-born object RFSs.
- We carry out the SMC implementation of the proposed filter for general non-linear multi-target tracking scenarios.
2. RFS Model with Amplitude Information for Radar Sensors under Unknown Clutter Rate
2.1. RFS Model with Amplitude Information for Unknown Clutter Rate
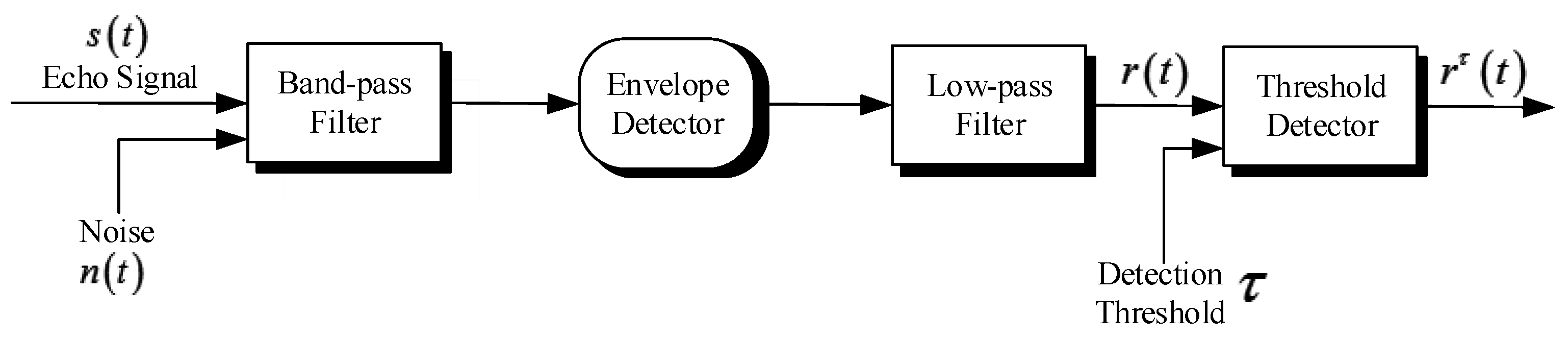
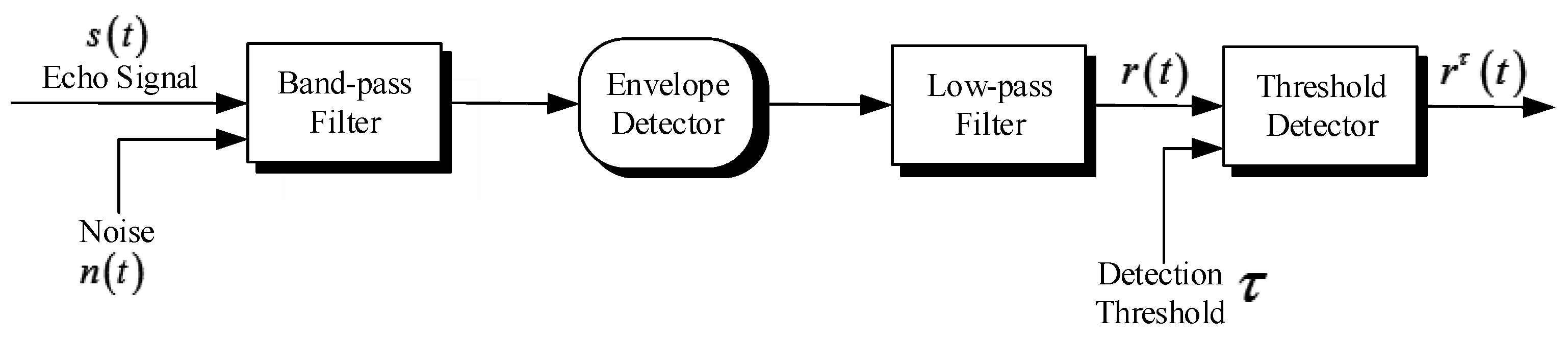
2.2. Amplitude Likelihoods for Radar Sensors
3. UCR-MBerF-AI and SMC Implementation
3.1. UCR-MBerF-AI
3.1.1. UCR-MBerF-AI Prediction
3.1.2. UCR-MBerF-AI Update
3.2. SMC Implementation
3.2.1. SMC Prediction
3.2.2. SMC Update
3.2.3. Resampling
3.2.4. Multi-Target State and Clutter Rate Estimation
| Algorithm 1. Processing Steps of the SMC-UCR-MBerF-AI |
Initialization:
|
4. Simulation
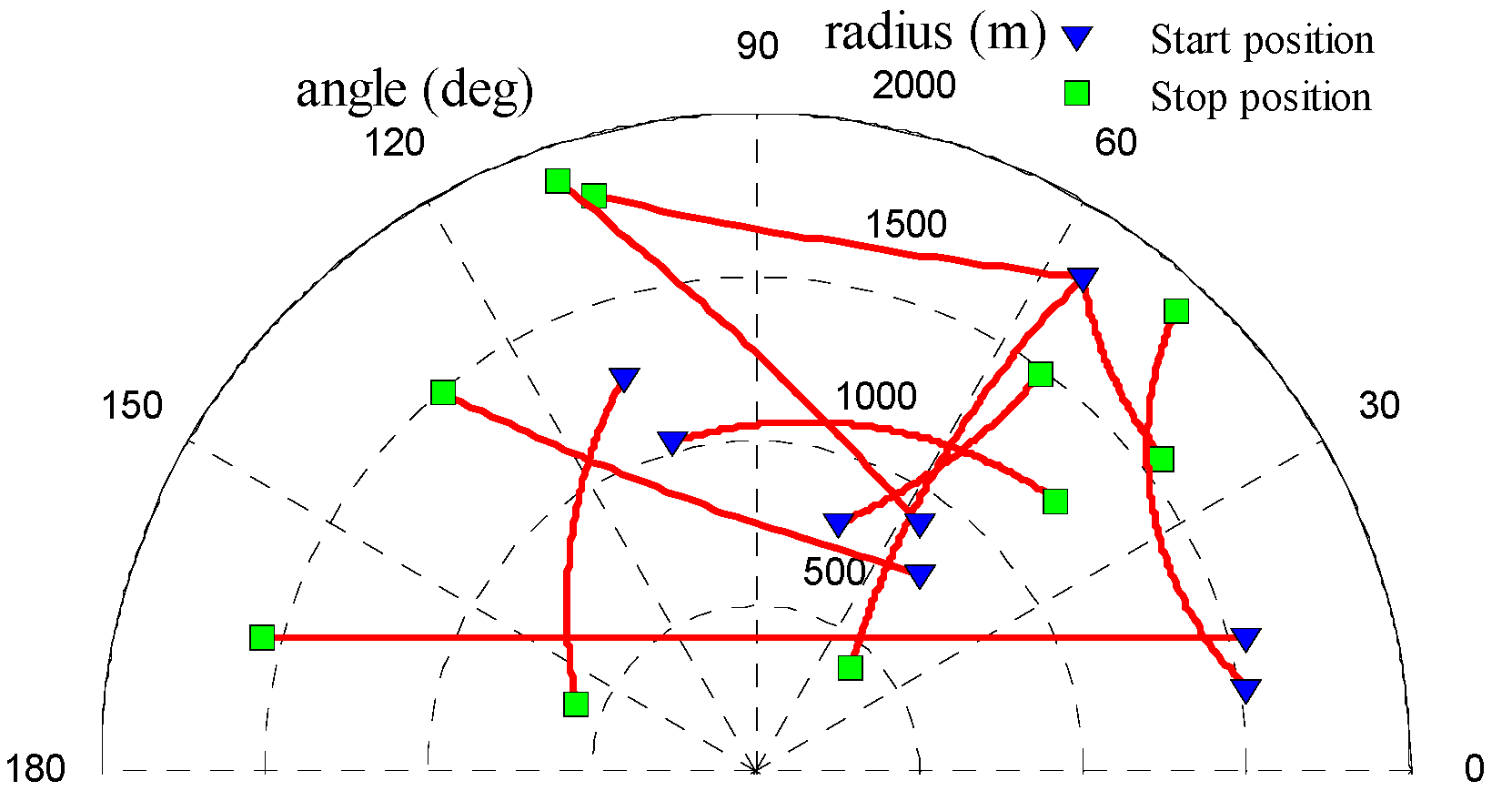
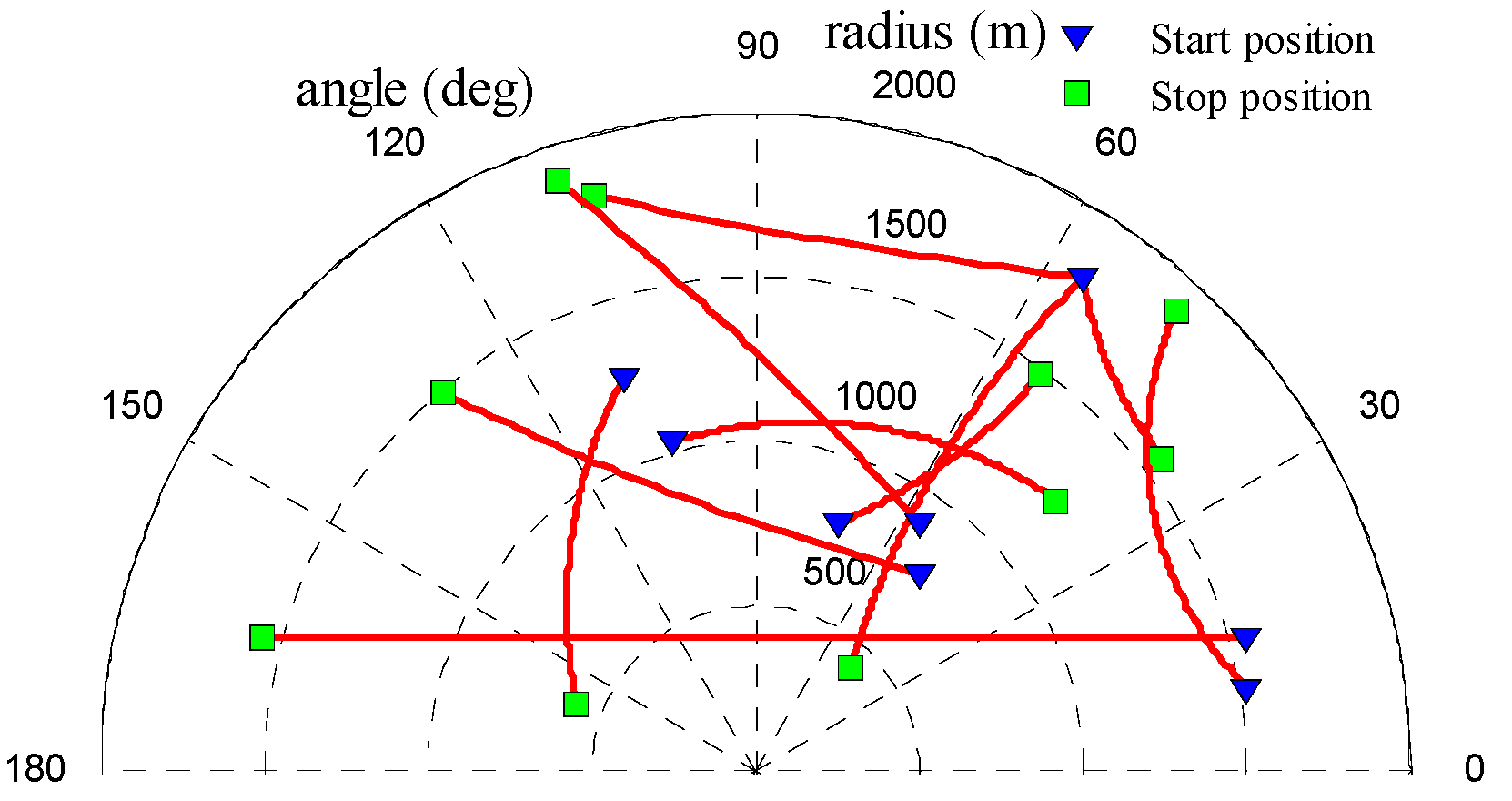
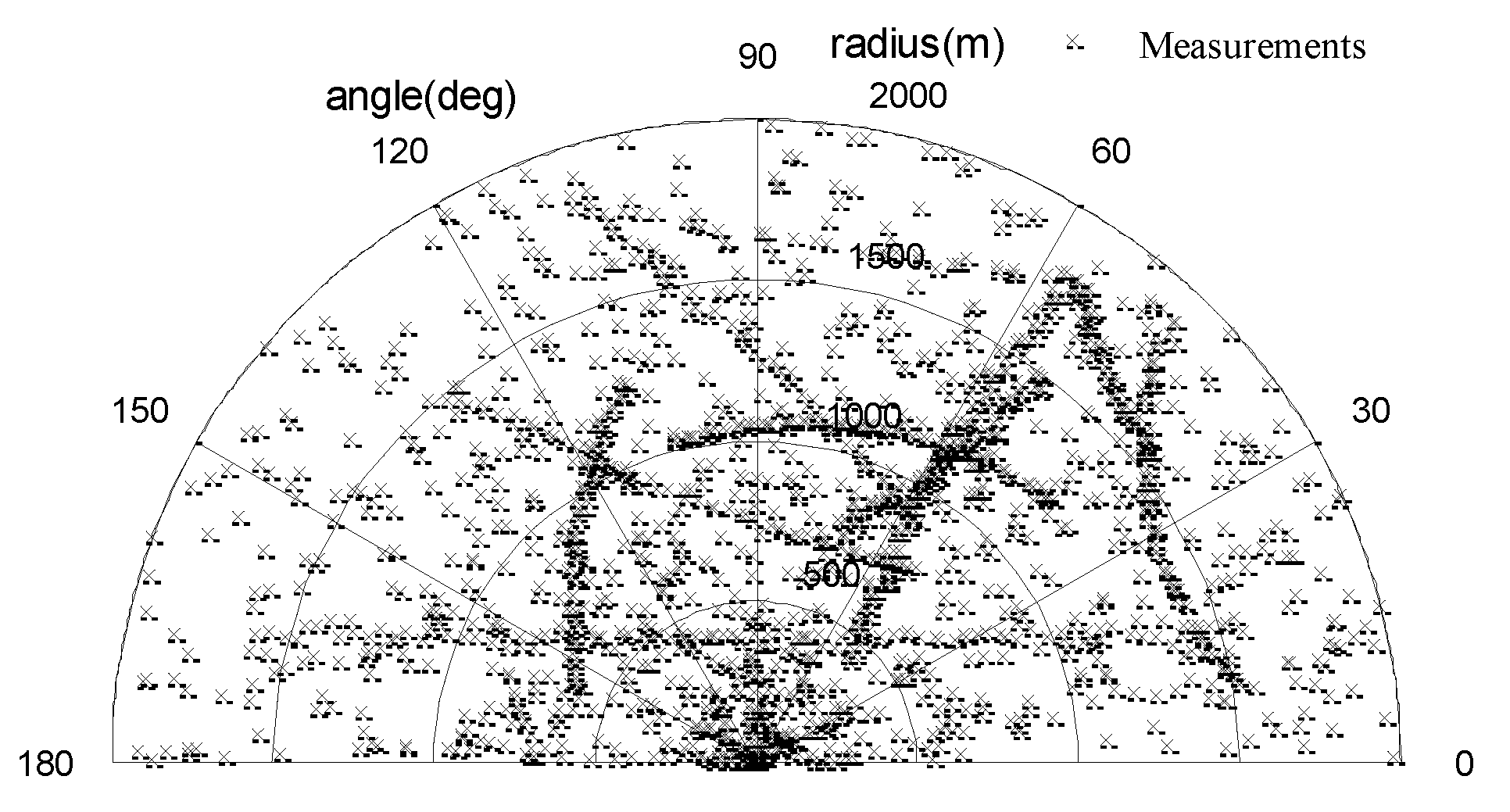
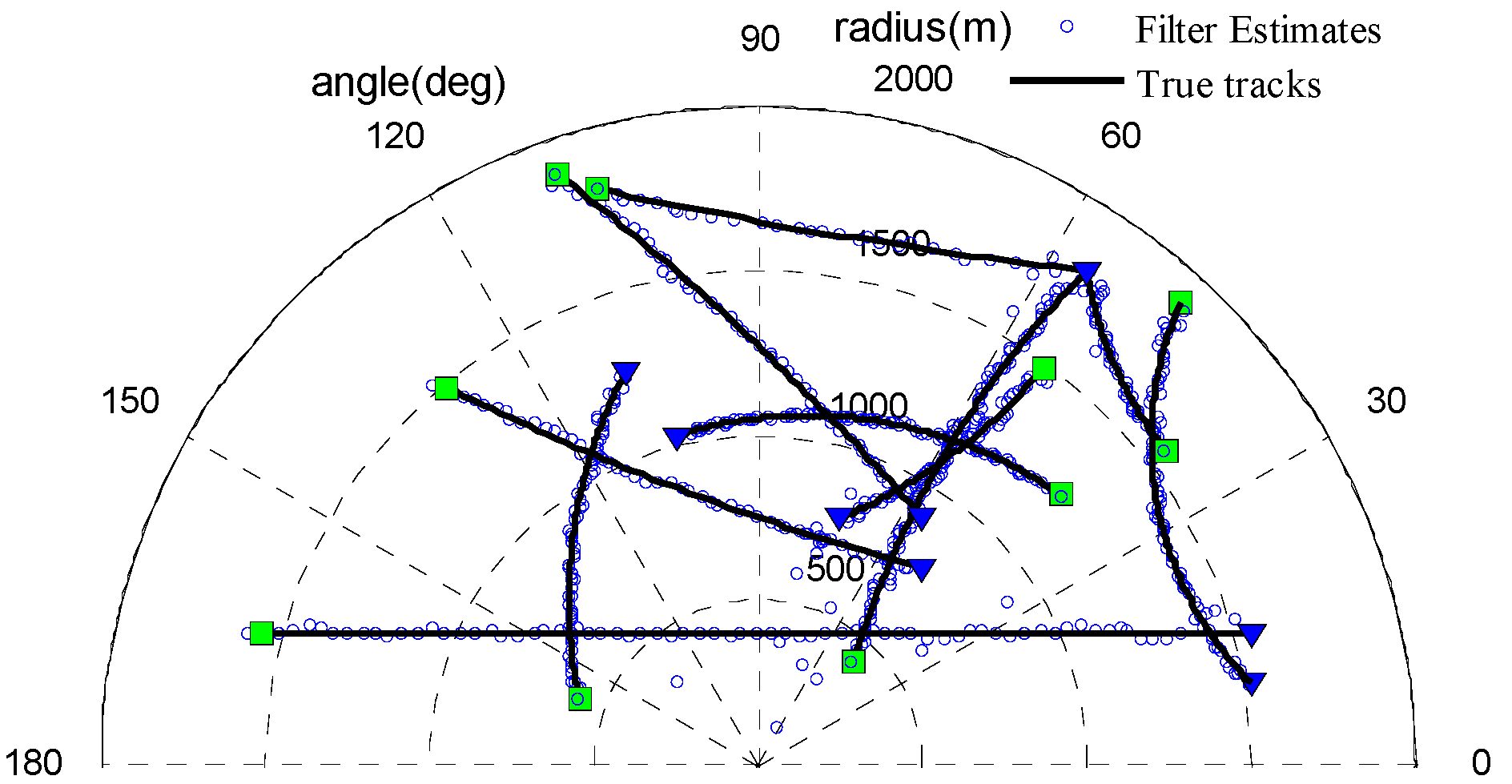
4.1. Simulation Scenario
4.1.1. Actual Target Model
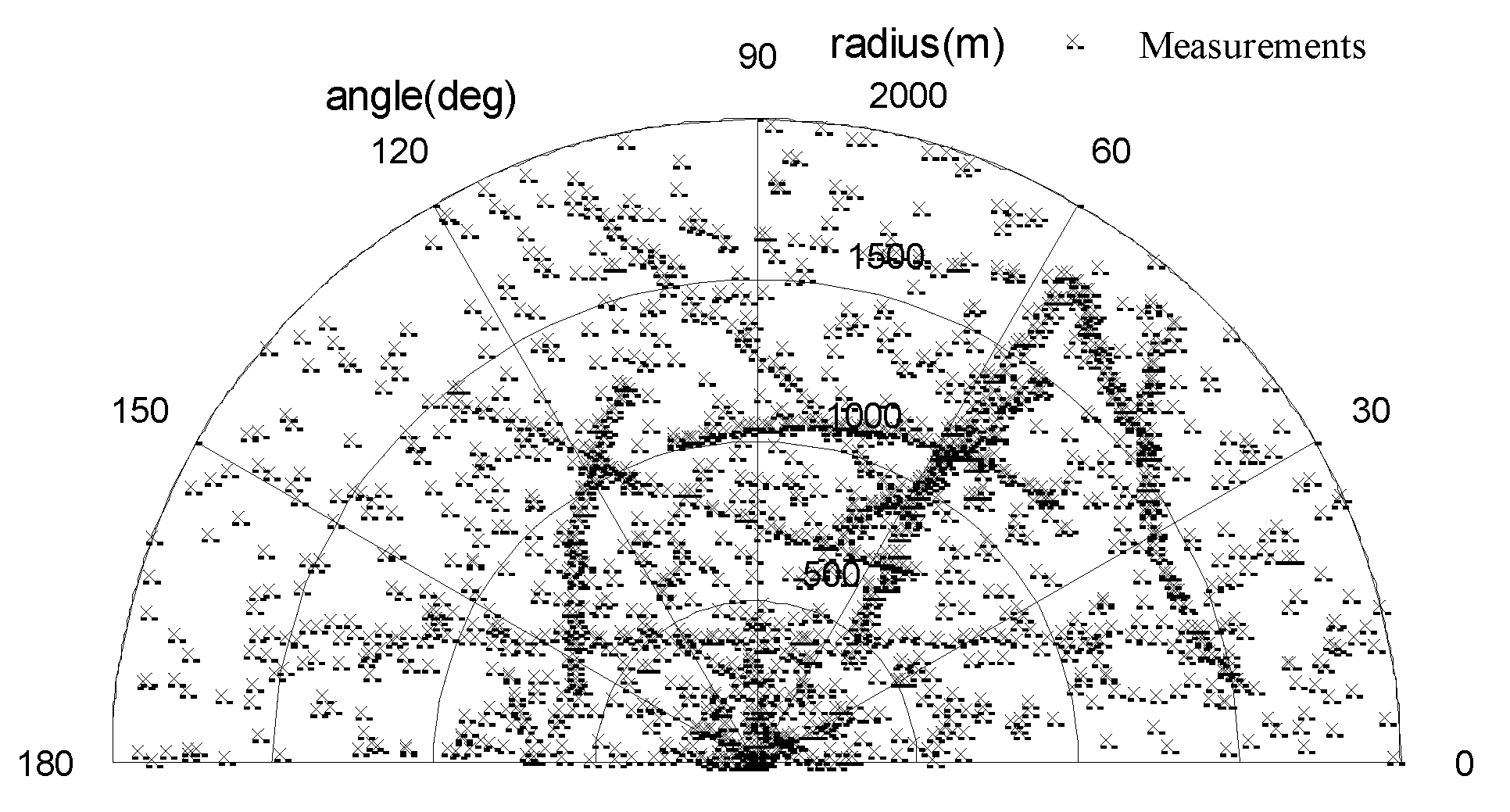
4.1.2. Clutter Model
4.1.3. Filter Parameters
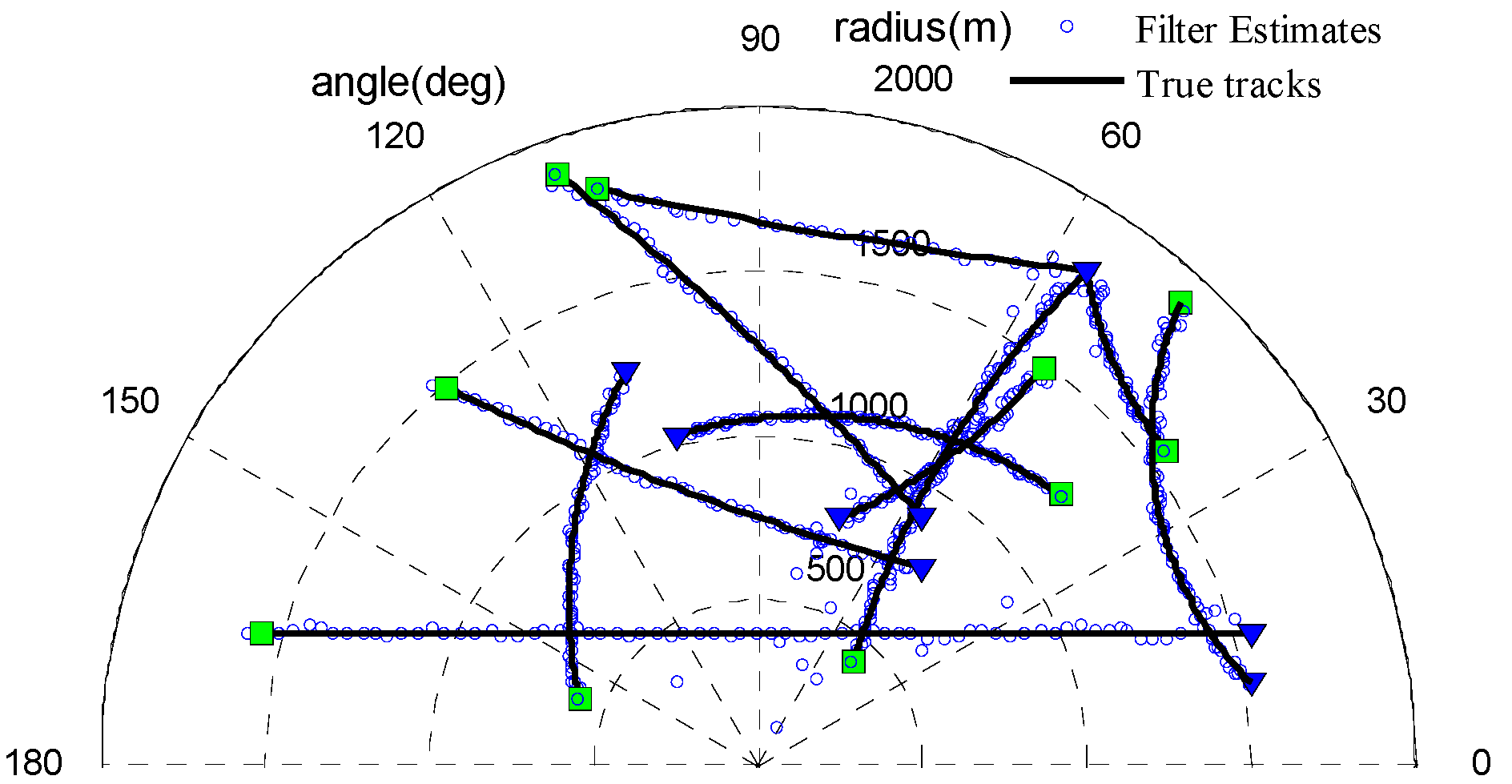
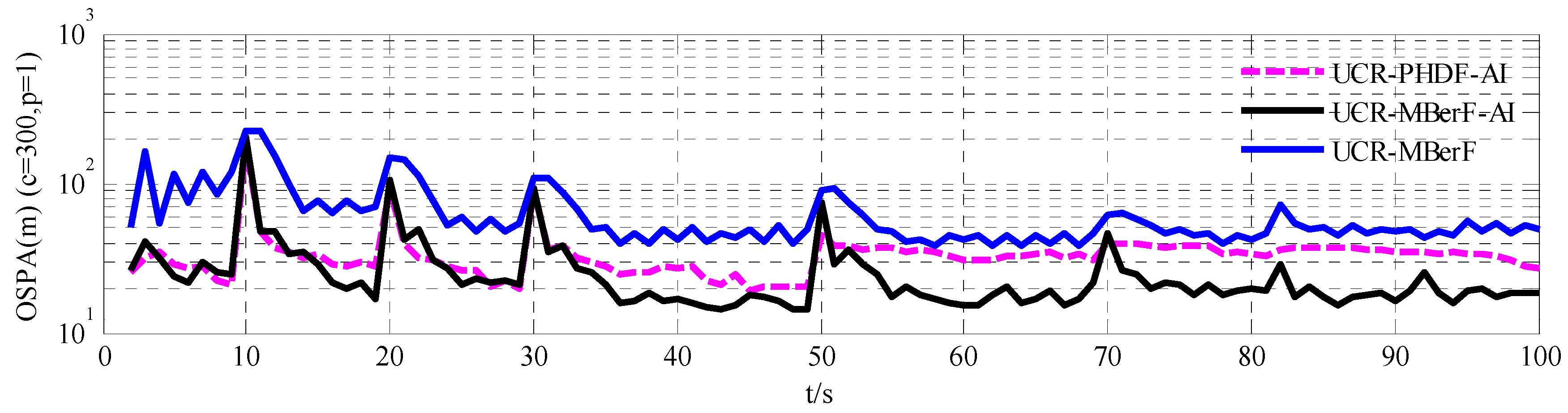
4.2. Results
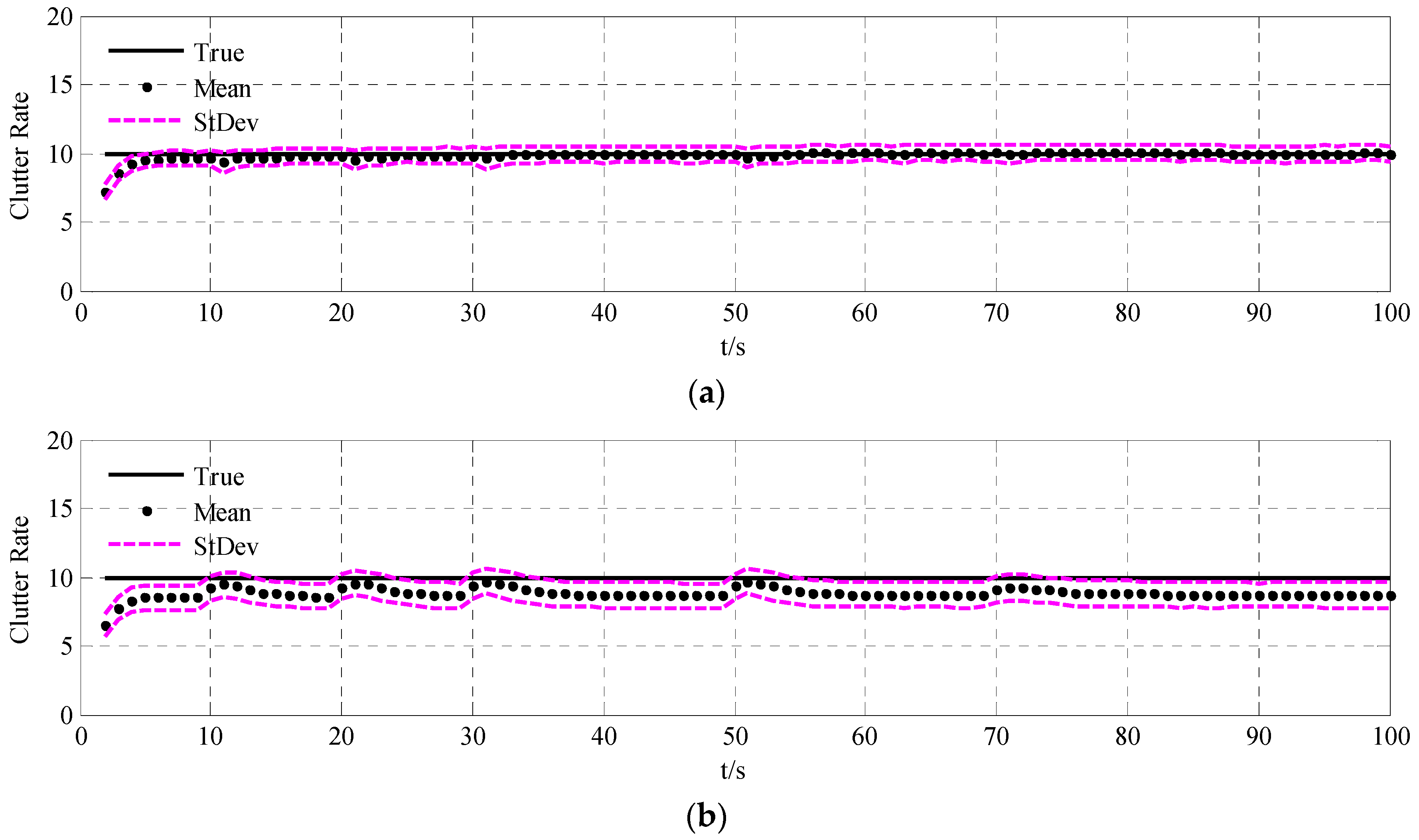
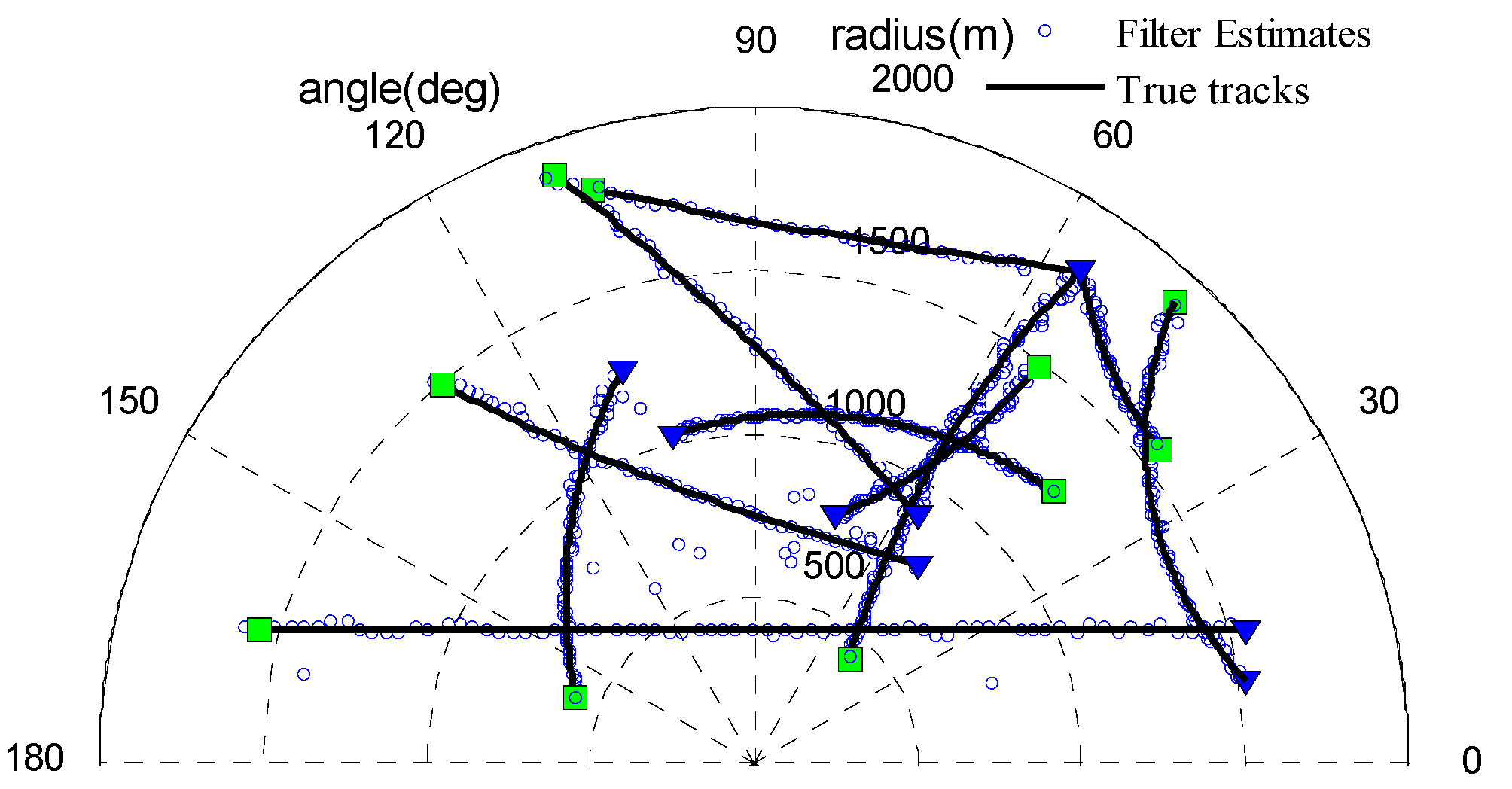
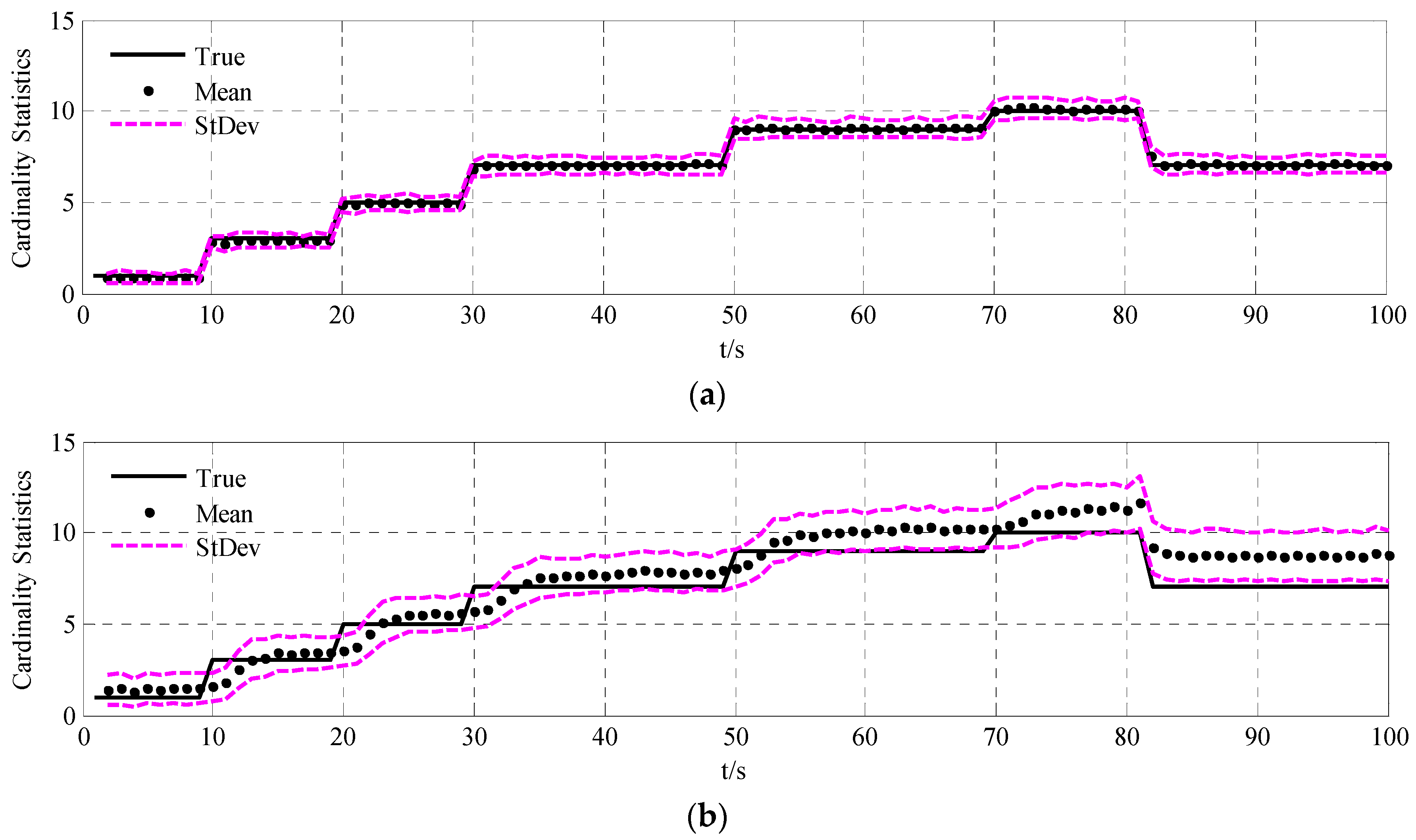
4.2.1. Multi-Target Tracking with the Fixed Clutter Rate

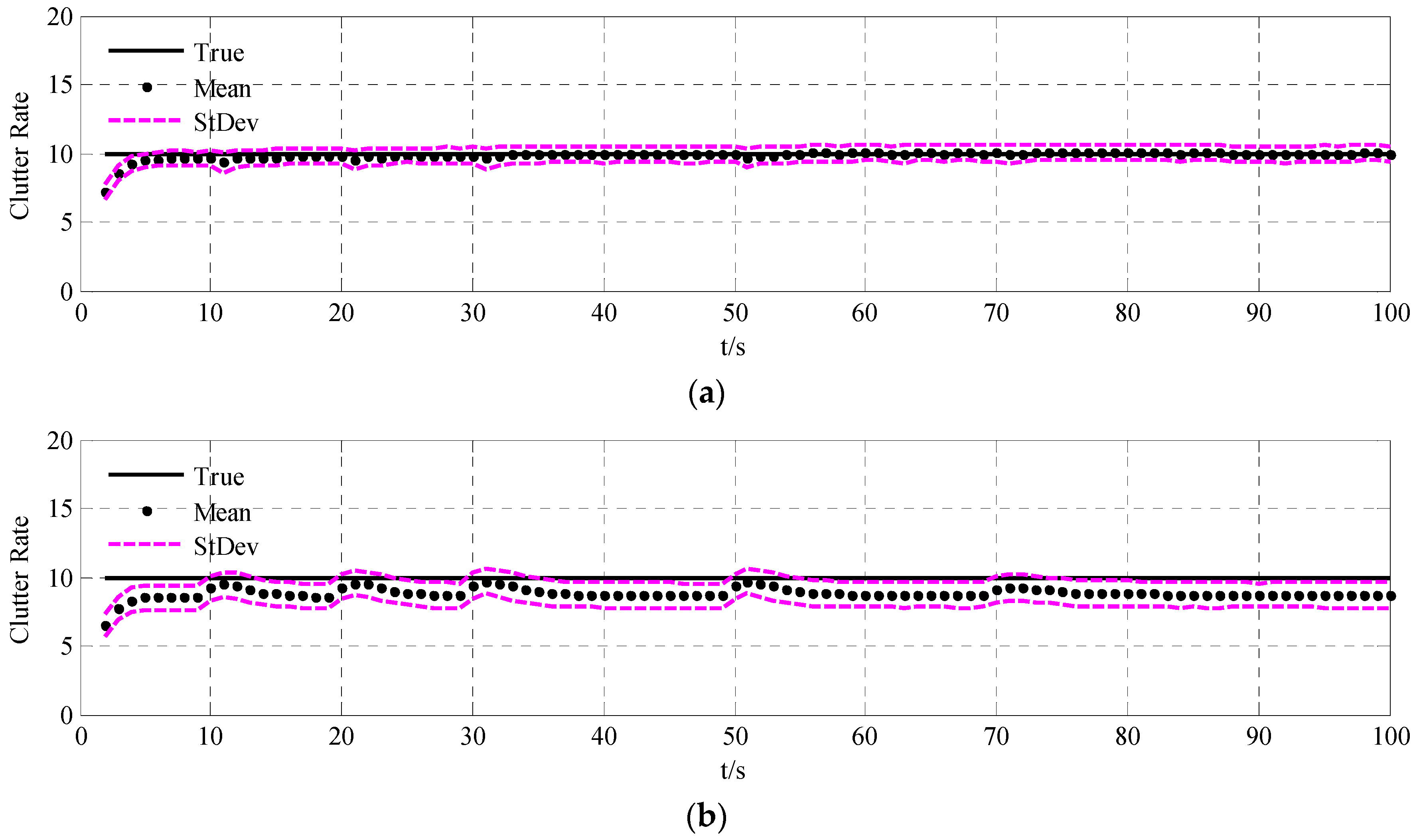
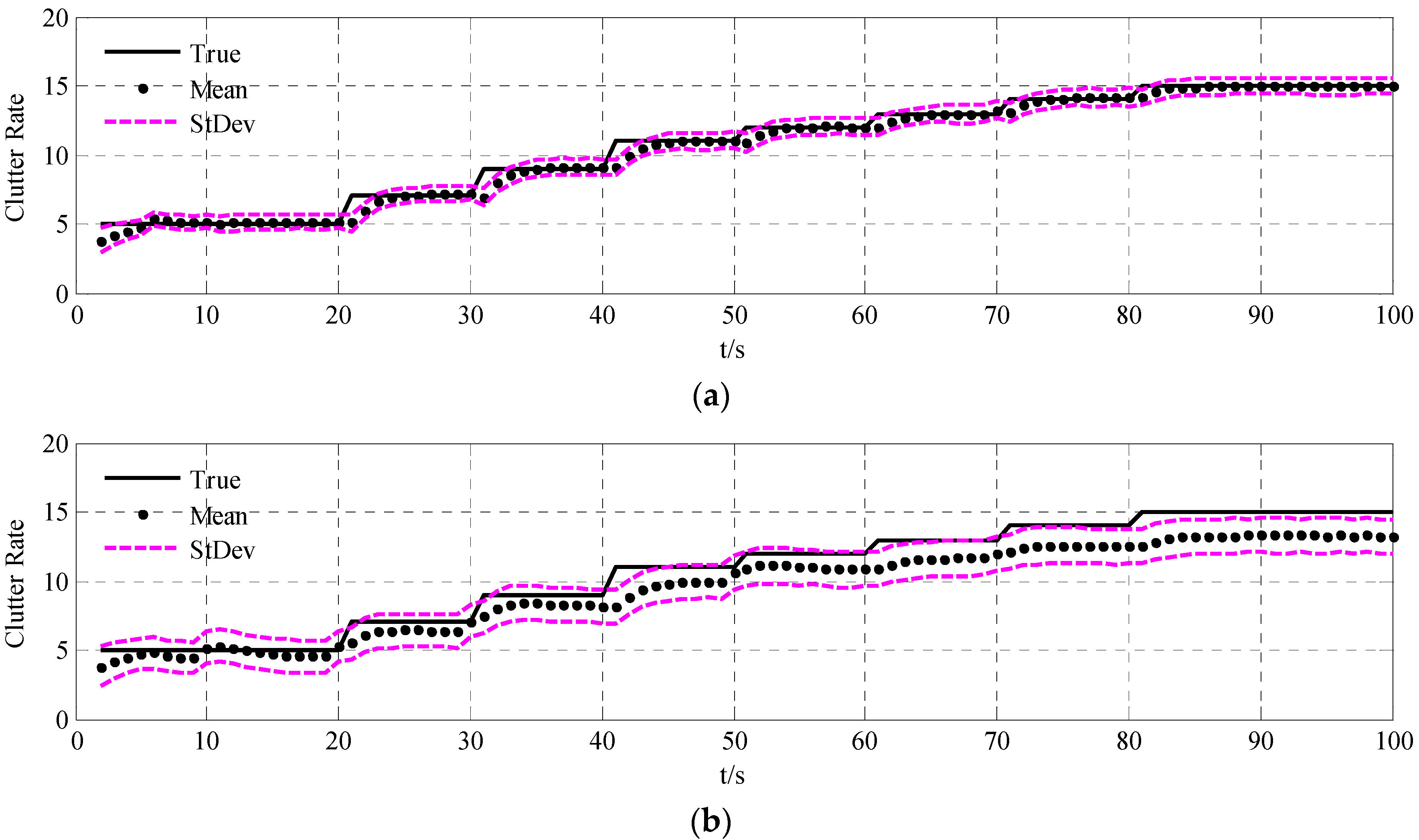
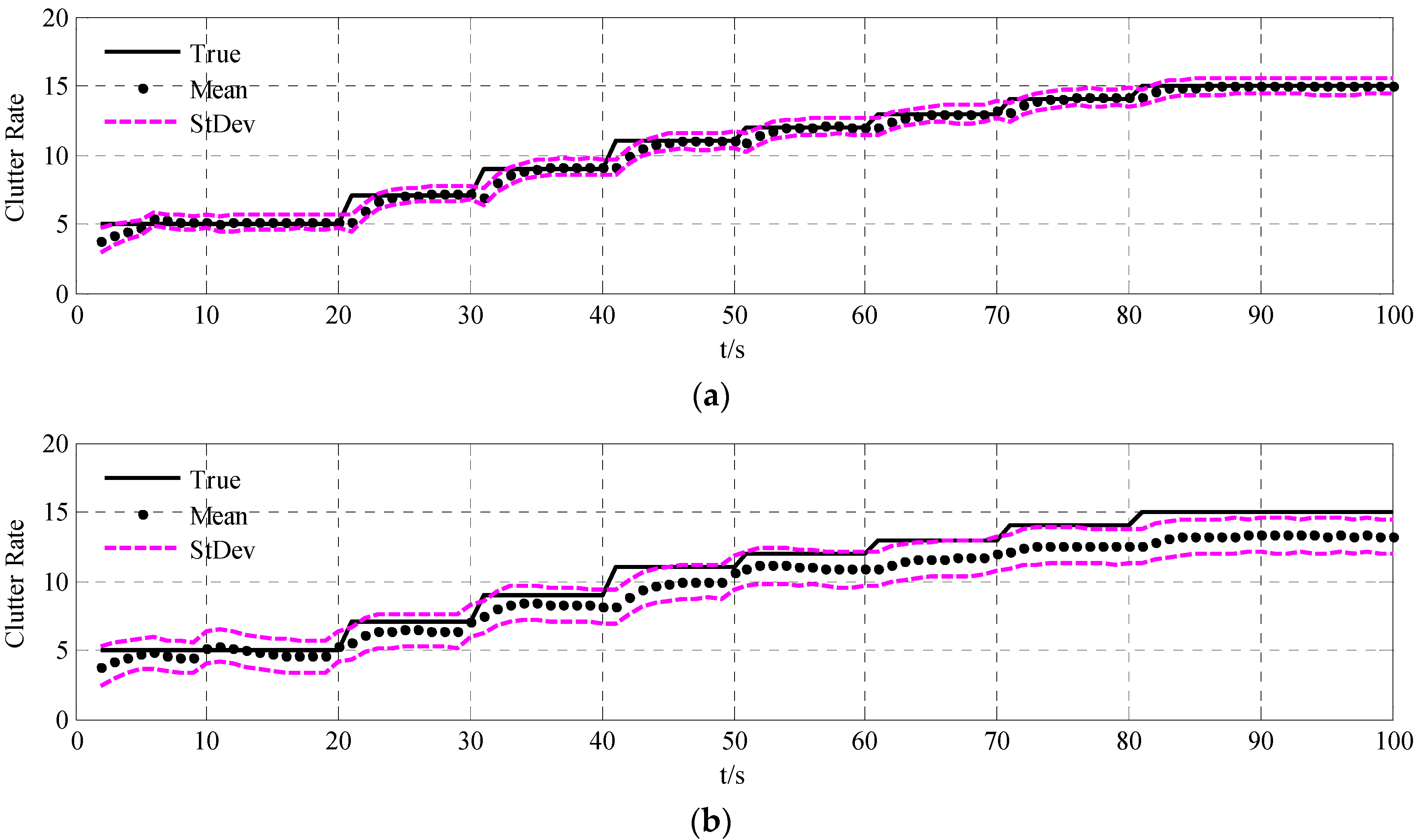
4.2.2. Multi-Target Tracking with the Time-Varying Clutter Rate
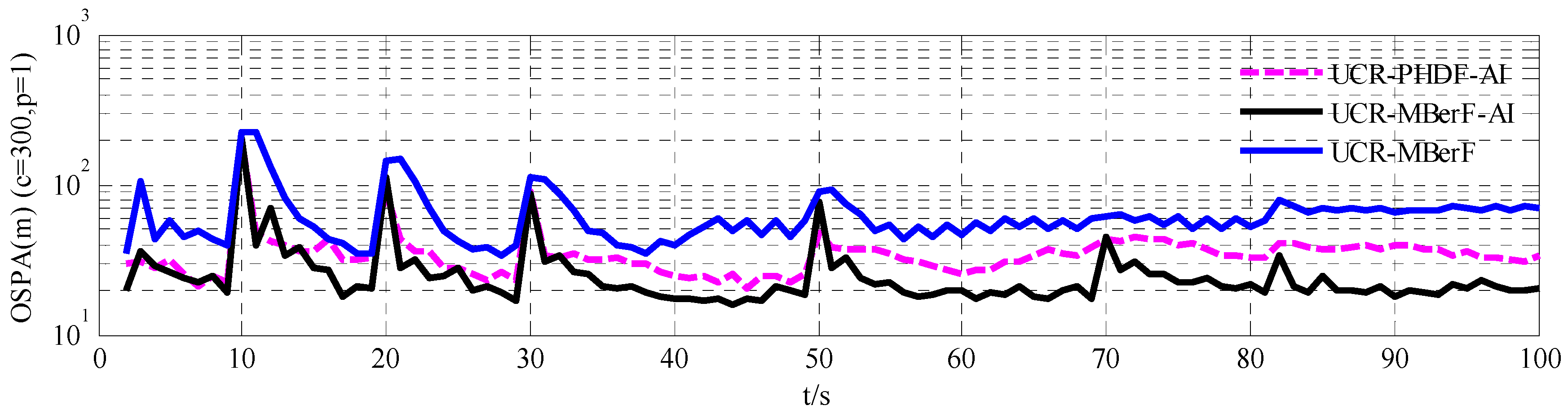
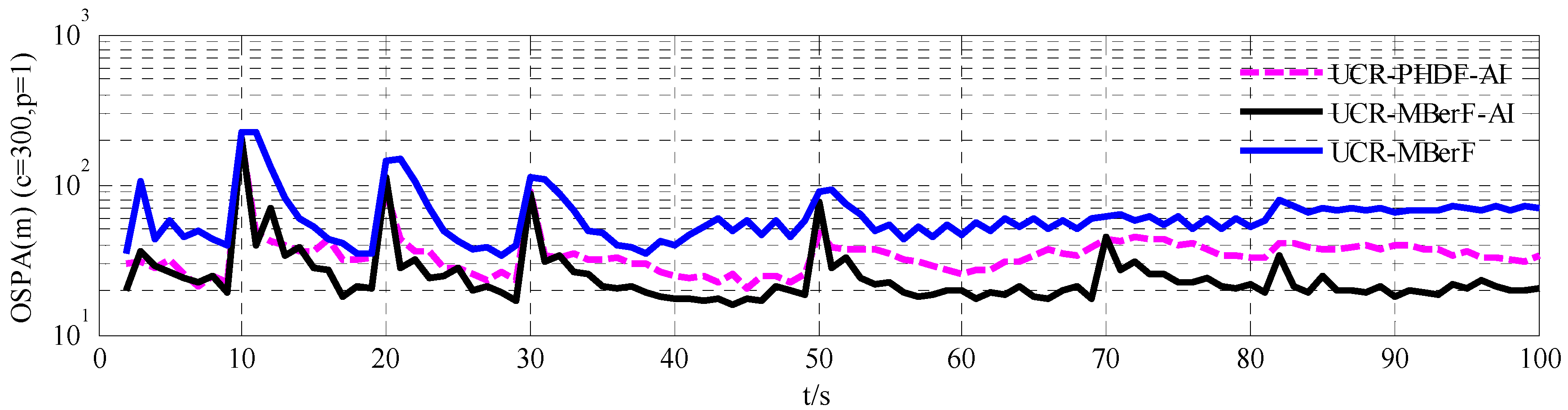
4.2.3. Multi-Target Tracking at Various SNR Levels

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SNR | 10.50 dB | 11.12 dB | 11.85 dB | 13.00 dB | 14.50 dB |
|---|---|---|---|---|---|
| 0.70 | 0.80 | 0.90 | 0.95 | 0.99 | |
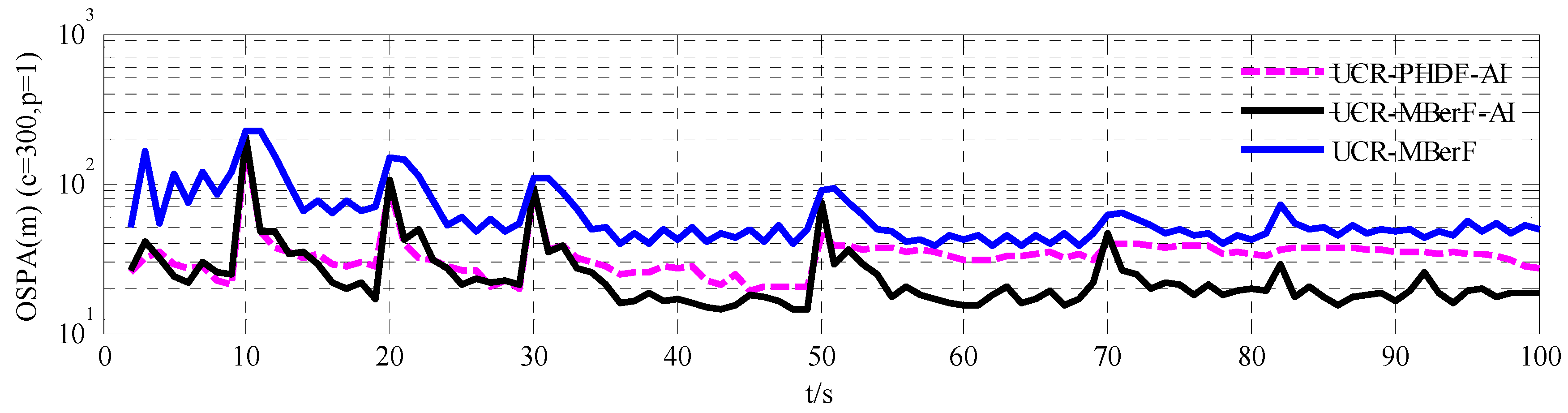
| UCR-MBerF-AI | 102.63 | 74.72 | 49.25 | 26.39 | 24.85 |
| UCR-PHDF-AI | 116.54 | 91.83 | 64.61 | 37.72 | 34.95 |
| UCR-MBerF | 129.88 | 107.48 | 87.98 | 63.47 | 57.84 |
| SNR | 10.50 dB | 11.12 dB | 11.85 dB | 13.00 dB | 14.50 dB |
|---|---|---|---|---|---|
| 0.70 | 0.80 | 0.90 | 0.95 | 0.99 | |
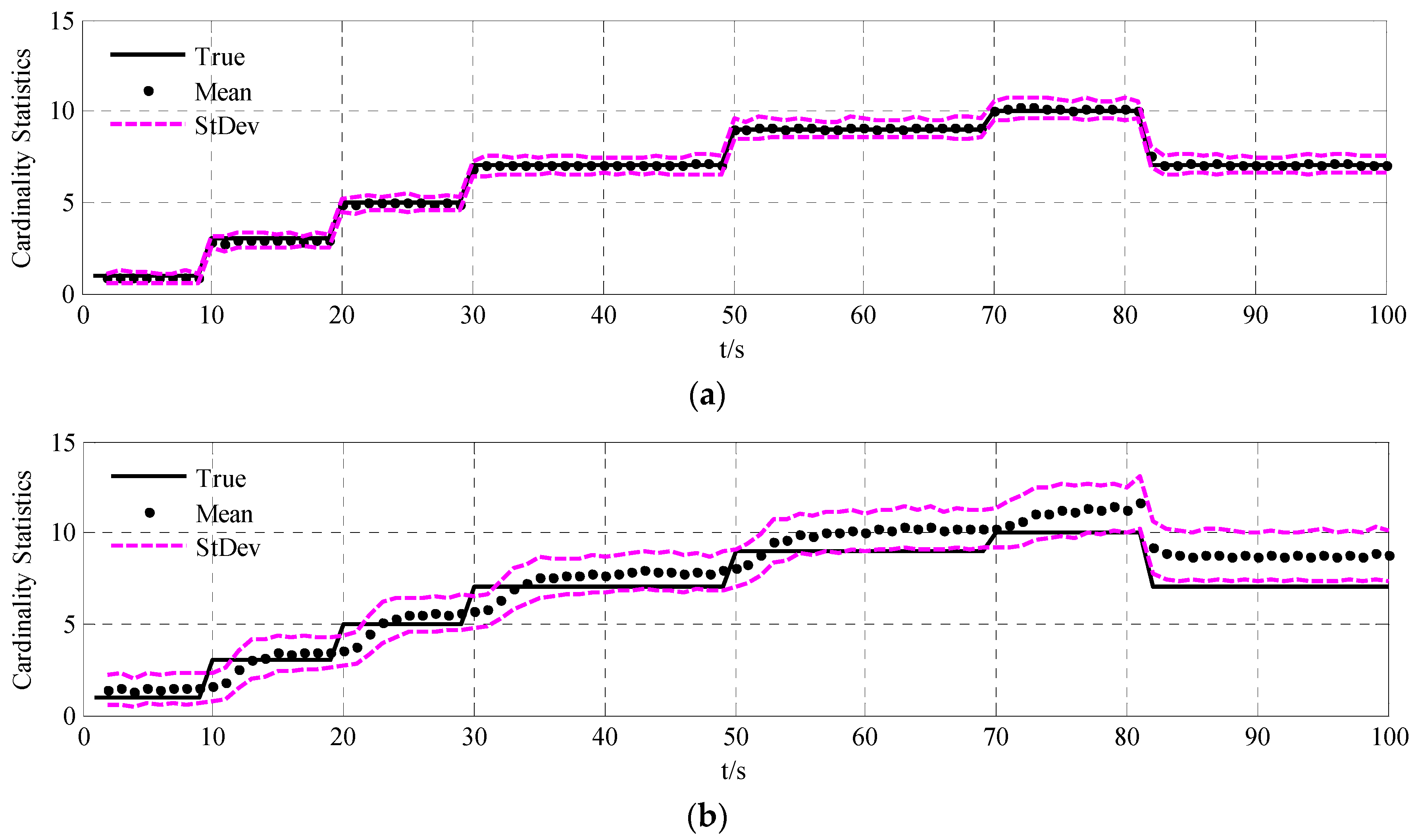
| UCR-MBerF-AI | 9.65 | 9.72 | 9.85 | 9.94 | 9.98 |
| UCR-PHDF-AI | 9.03 | 9.17 | 9.26 | 9.35 | 9.53 |
| UCR-MBerF | 8.56 | 8.73 | 8.90 | 9.15 | 9.32 |
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Skolnik, M.I. Introduction to Radar Systems, 3rd ed.; Publishing House of Electronics Industry: Beijing, China, 2007; pp. 1–94. [Google Scholar]
- Blackrnan, S.; House, A. Design and Analysis of Modern Tracking Systems; Artech House: Boston, MA, USA, 1999; pp. 1–24. [Google Scholar]
- Bar-Shalom, Y.; Blair, W.D. Multitarget-Multisensor Tracking: Advanced Applications; Artech House: Norwood, MA, USA, 2000; pp. 1–30. [Google Scholar]
- Mahler, R. Statistical Multisource-Multitarget Information Fusion; Artech House: Norwood, MA, USA, 2007; pp. 585–682. [Google Scholar]
- Bar-Shalom, Y.; Li, X.R. Multitarget-Multisensor Tracking: Principles and Techniques; Yaakov Bar-Shalom: Storrs, CT, USA, 1995; pp. 385–404. [Google Scholar]
- Mušicki, D.; Evans, R. Joint integrated probabilistic data association: JIPDA. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 1093–1099. [Google Scholar] [CrossRef]
- Mahler, R. Multitarget Bayes filtering via first-order multitarget moments. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1152–1178. [Google Scholar] [CrossRef]
- Mahler, R. PHD filters of higher order in target number. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1523–1543. [Google Scholar] [CrossRef]
- Vo, B.N.; Singh, S.; Doucet, A. Sequential Monte Carlo methods for multitarget filtering with random finite sets. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1224–1245. [Google Scholar]
- Vo, B.N.; Ma, W. The Gaussian mixture probability hypothesis density filter. IEEE Trans. Signal Process. 2006, 54, 4091–4104. [Google Scholar] [CrossRef]
- Vo, B.T.; Vo, B.N.; Cantoni, A. Analytic implementations of the cardinalized probability hypothesis density filter. IEEE Trans. Signal Process. 2007, 55, 3553–3567. [Google Scholar] [CrossRef]
- Clark, D.; Bell, J. Convergence results for the particle PHD filter. IEEE Trans. Signal Process. 2006, 54, 2652–2661. [Google Scholar] [CrossRef]
- Clark, D.; Vo, B.T. Convergence analysis of the Gaussian mixture PHD filter. IEEE Trans. Signal Process. 2007, 55, 1204–1212. [Google Scholar] [CrossRef]
- Xu, Y.; Xu, H.; An, W.; Xu, D. FISST based method for multi-target tracking in the image plane of optical sensors. Sensors 2012, 12, 2920–2934. [Google Scholar] [CrossRef] [PubMed]
- Mahler, R.; Vo, B.T.; Vo, B.N. CPHD filtering with unknown clutter rate and detection profile. IEEE Trans. Signal Process. 2011, 59, 3497–3513. [Google Scholar] [CrossRef]
- Vo, B.T.; Vo, B.N.; Cantoni, A. The cardinality balanced multi-target multi-Bernoulli filter and its implementations. IEEE Trans. Signal Process. 2009, 57, 409–423. [Google Scholar]
- Hoseinnezhad, R.; Vo, B.N.; Vo, B.T. Bayesian integration of audio and visual information for multi-target tracking using a CB-MeMBer filter. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Prague, Czech, 22–27 May 2011; pp. 2300–2303.
- Hoseinnezhad, R.; Vo, B.N.; Vo, B.T. Visual tracking of numerous targets via multi-Bernoulli filtering of image data. Pattern Recognit. 2012, 45, 3625–3635. [Google Scholar] [CrossRef]
- Vo, B.N.; Vo, B.T.; Pham, N.T. Joint detection and estimation of multiple objects from image observations. IEEE Trans. Signal Process. 2010, 58, 5129–5141. [Google Scholar] [CrossRef]
- Zhang, X. Adaptive control and reconfiguration of mobile wireless sensor networks for dynamic multi-target tracking. IEEE Trans. Autom. Control. 2011, 56, 2429–2444. [Google Scholar] [CrossRef]
- Hoseinnezhad, R.; Vo, B.N.; Vo, B.T. Visual tracking in background subtracted image sequences via multi-Bernoulli filtering. IEEE Trans. Signal Process. 2013, 61, 392–397. [Google Scholar] [CrossRef]
- Vo, B.T.; Vo, B.N.; Hoseinnezhad, R. Robust multi-Bernoulli filtering. IEEE J. Sel. Top. Signal Process. 2013, 7, 399–409. [Google Scholar] [CrossRef]
- Ristic, B.; Clark, D.; Vo, B.N. Adaptive target birth intensity for PHD and CPHD filters. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 1656–1668. [Google Scholar] [CrossRef]
- Lian, F.; Li, C.; Han, C. Convergence analysis for the SMC-MeMBer and SMC-CBMeMBer filters. J. Appl. Math. 2012, 2012, 1–25. [Google Scholar] [CrossRef]
- Schuhmacher, D.; Vo, B.T.; Vo, B.N. A consistent metric for performance evaluation of multi-object filters. IEEE Trans. Signal Process. 2008, 56, 3447–3457. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, C.; Wang, J.; Lei, P.; Bi, Y.; Sun, Z. Multi-Target Tracking Based on Multi-Bernoulli Filter with Amplitude for Unknown Clutter Rate. Sensors 2015, 15, 30385-30402. https://doi.org/10.3390/s151229804
Yuan C, Wang J, Lei P, Bi Y, Sun Z. Multi-Target Tracking Based on Multi-Bernoulli Filter with Amplitude for Unknown Clutter Rate. Sensors. 2015; 15(12):30385-30402. https://doi.org/10.3390/s151229804
Chicago/Turabian StyleYuan, Changshun, Jun Wang, Peng Lei, Yanxian Bi, and Zhongsheng Sun. 2015. "Multi-Target Tracking Based on Multi-Bernoulli Filter with Amplitude for Unknown Clutter Rate" Sensors 15, no. 12: 30385-30402. https://doi.org/10.3390/s151229804