
SSL: Signal Similarity-Based Localization for Ocean Sensor Networks

Abstract
:1. Introduction
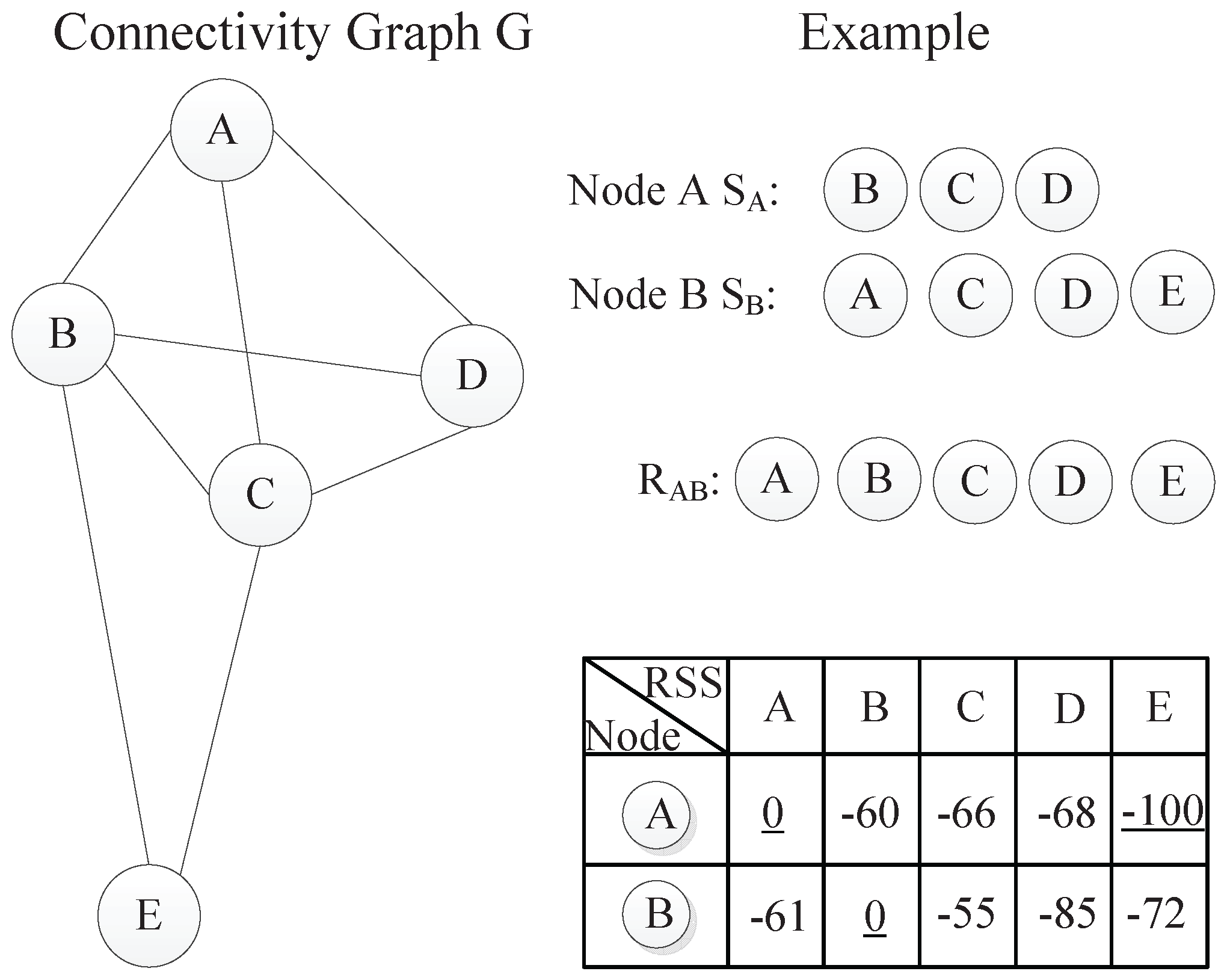
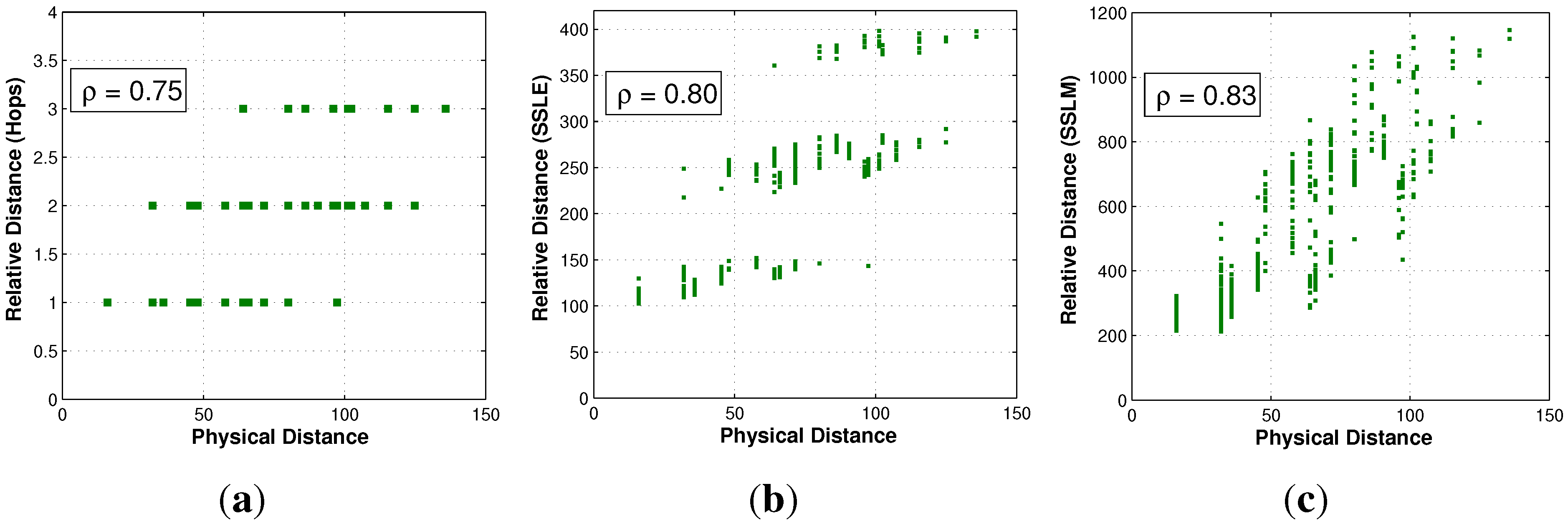
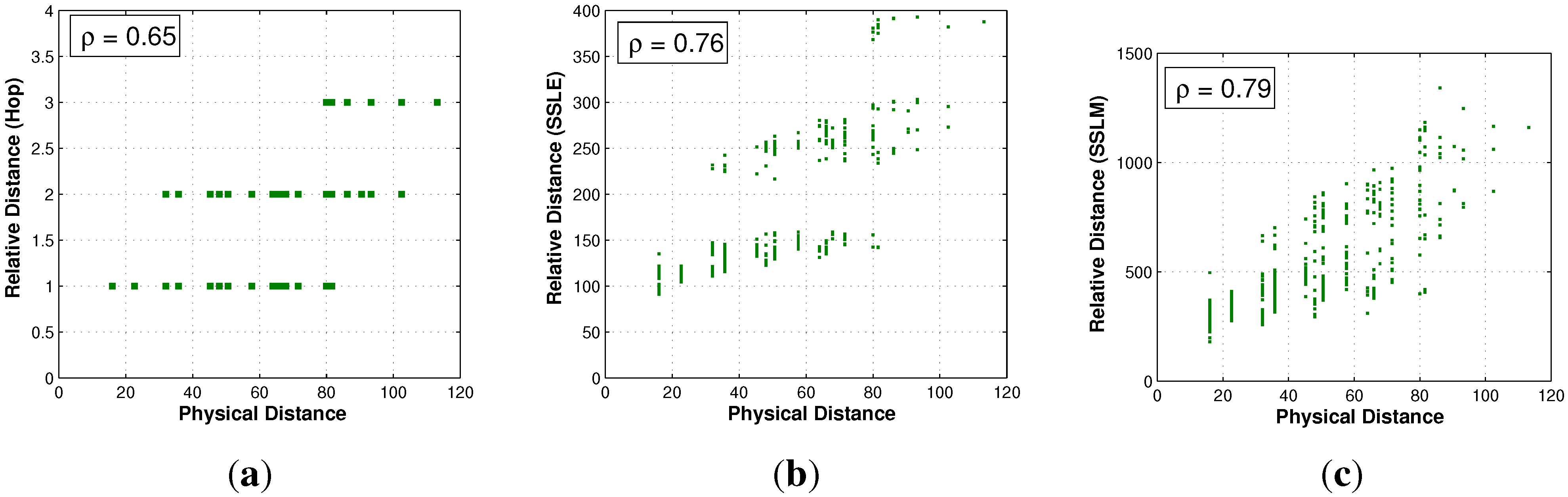
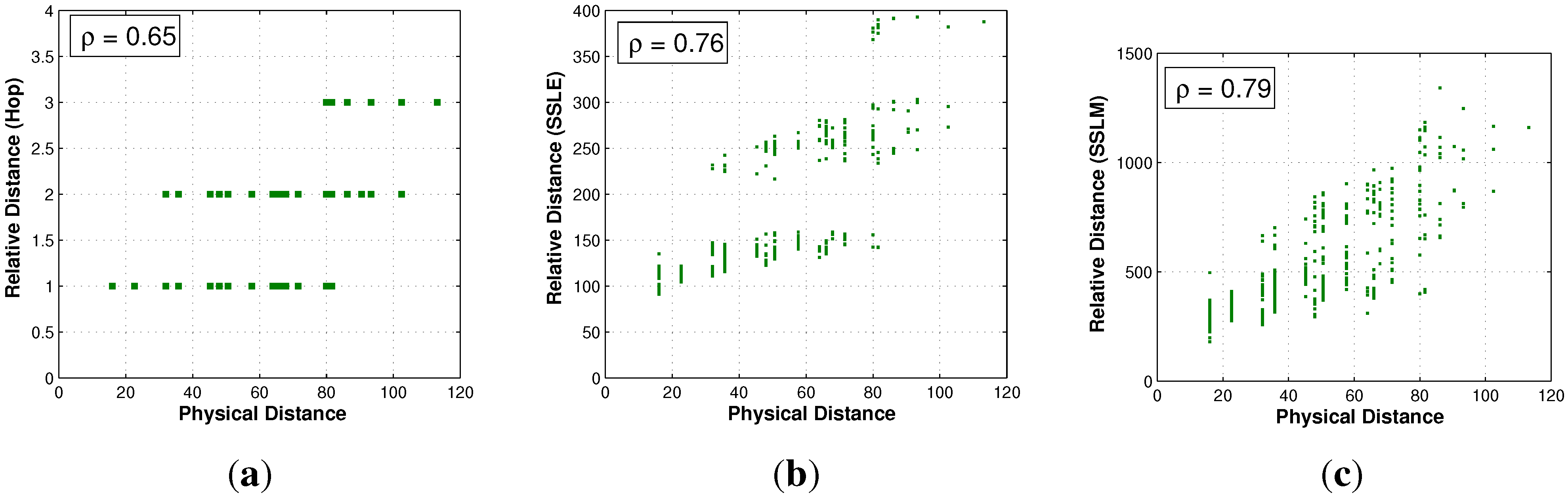
- This paper proposes a novel method to estimate the relative distance between any node pair based on the comparison of RSSI similarity, which has low computation complexity and good distance correlation (the correlation coefficient has increased by about from the experiments).
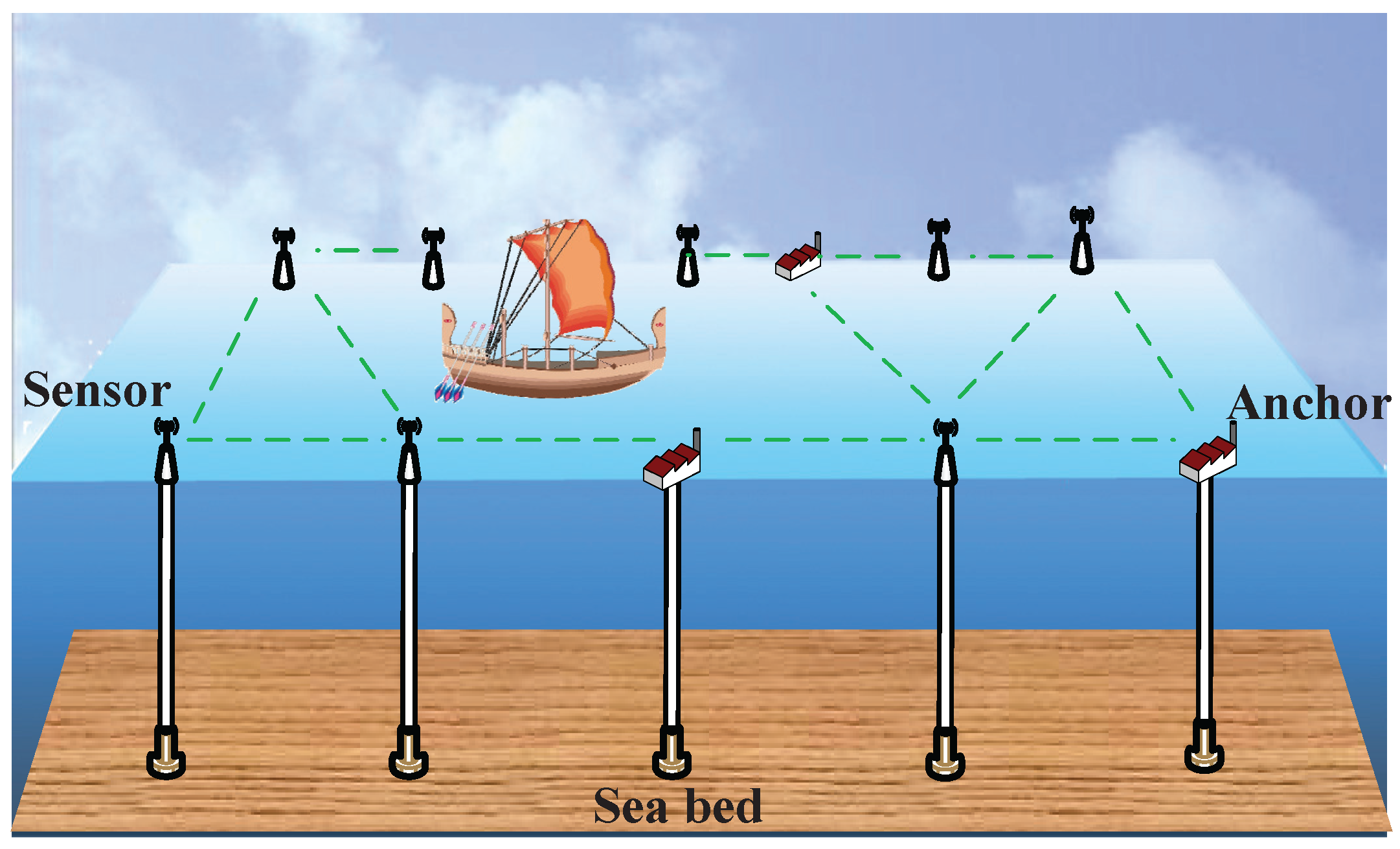
- A complete localization solution is built for the sea surface sensor network, which fully considers and utilizes the characteristics of both the ocean environment and RSSI values.
- The performance of the proposed design is evaluated by practical experiments with two types of networks, which confirm its effectiveness further.
2. Related Work
3. Motivation
- The localization algorithm must be energy efficient, because the replacement of the batteries is often troublesome. This requires that there is less communication and lower complexity.
- The localization algorithm must be robust, since the aggressive and rugged ocean environment may cause the loss of nodes or node faults.
- The localization system should be low cost. The monitored ocean area often needs many nodes to cover. Thus, we cannot add too much additional equipment (e.g., GPS) for localization.
4. Signal Similarity-Based Localization
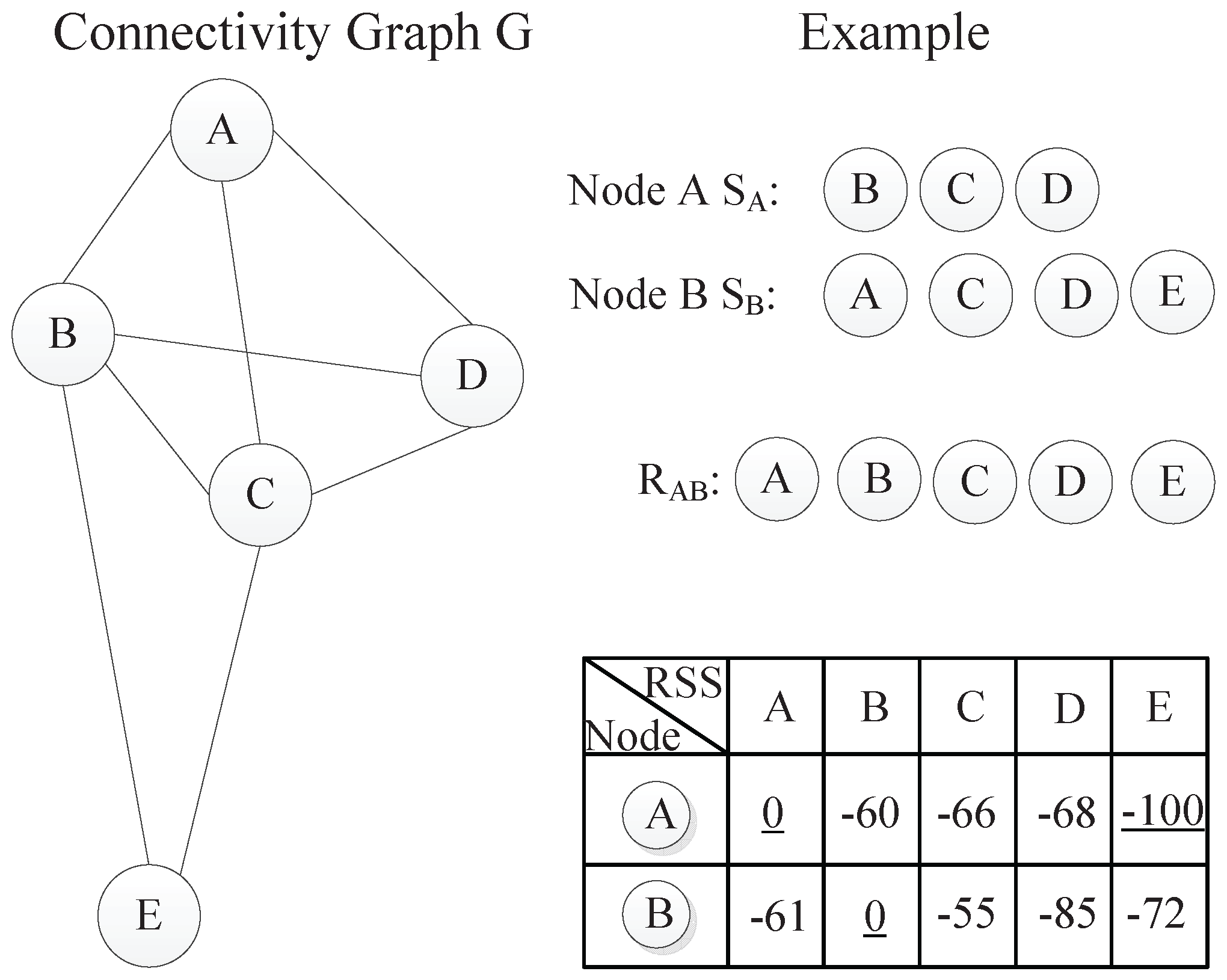
4.1. Distance Estimation for Neighboring Nodes
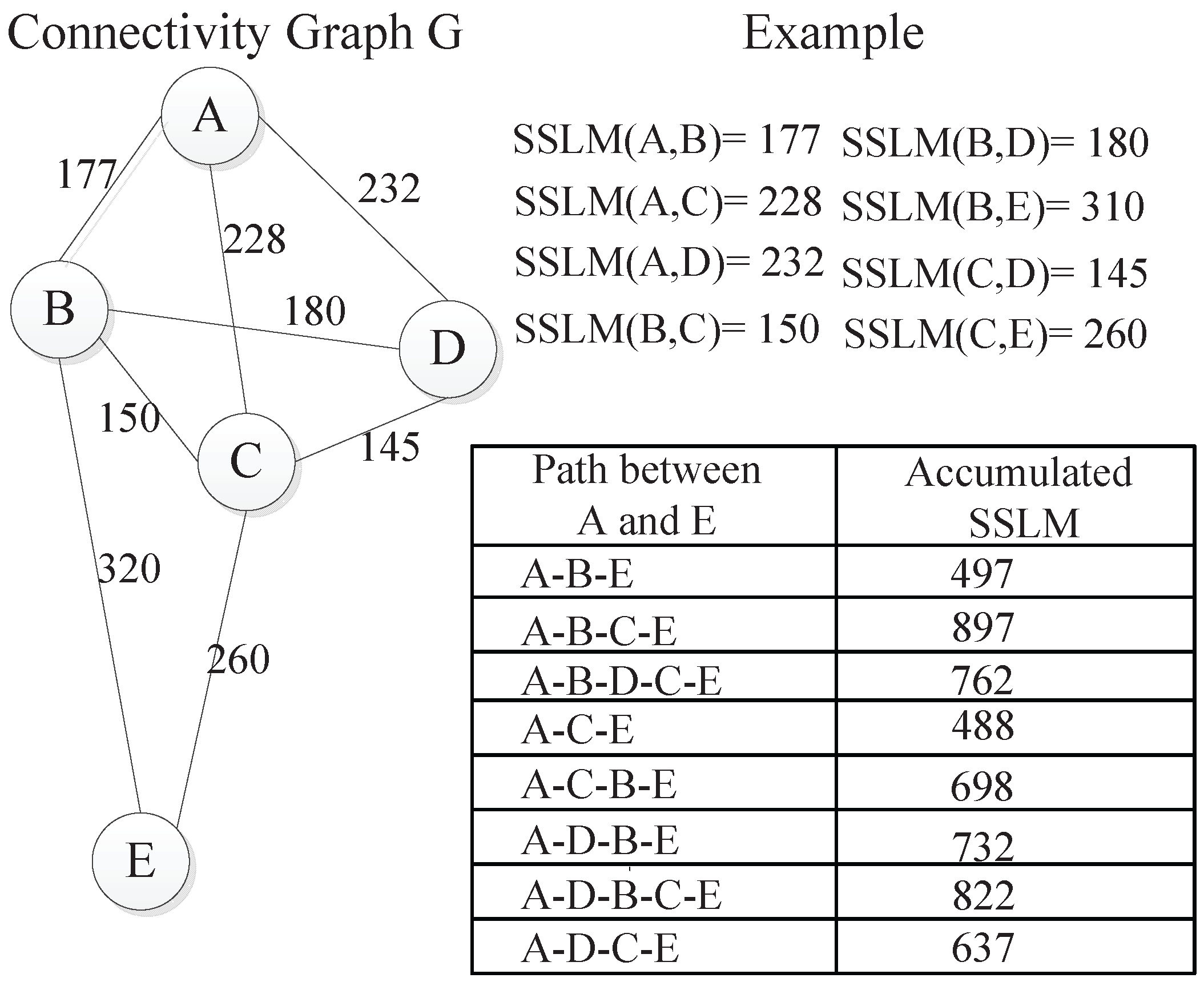
4.2. Distance Estimation for Non-Neighboring Nodes

4.3. Node Position Estimation
4.4. Algorithm Analysis
| Algorithm 1 SSL Node Localization Algorithm |
| Input: RSS, Anchor, N; Output: SSL;
|
5. Experiments
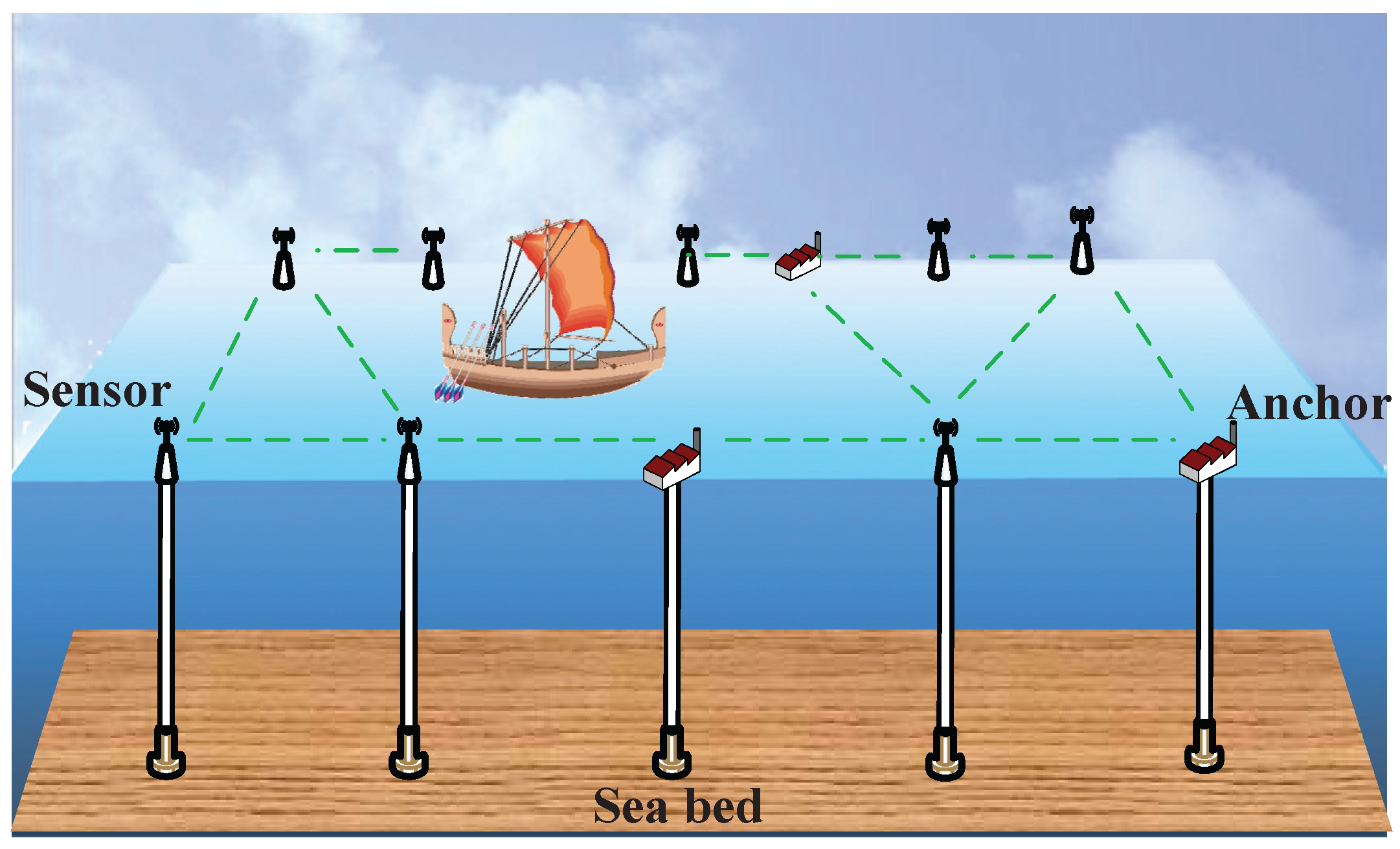
5.1. Experiment Setup

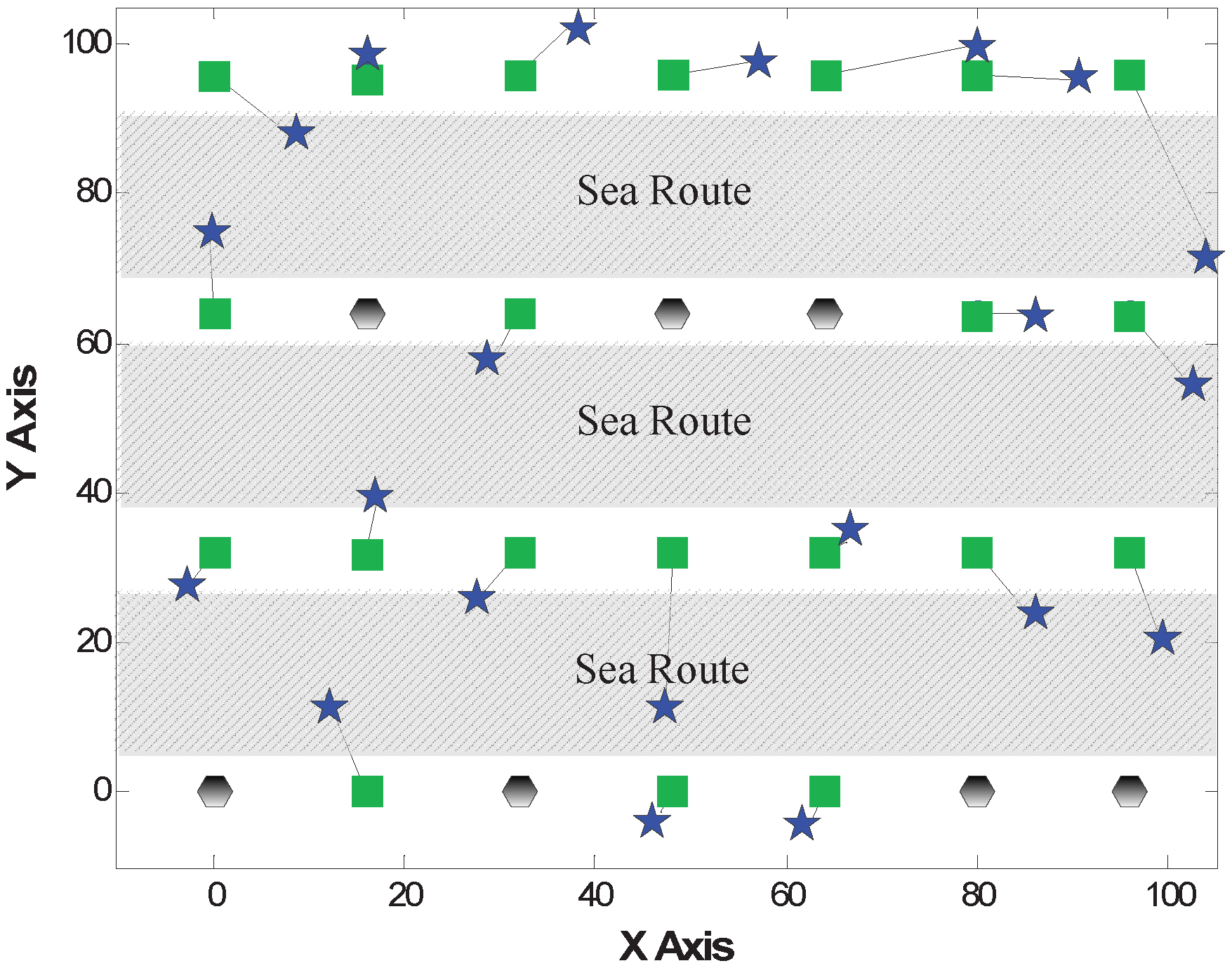
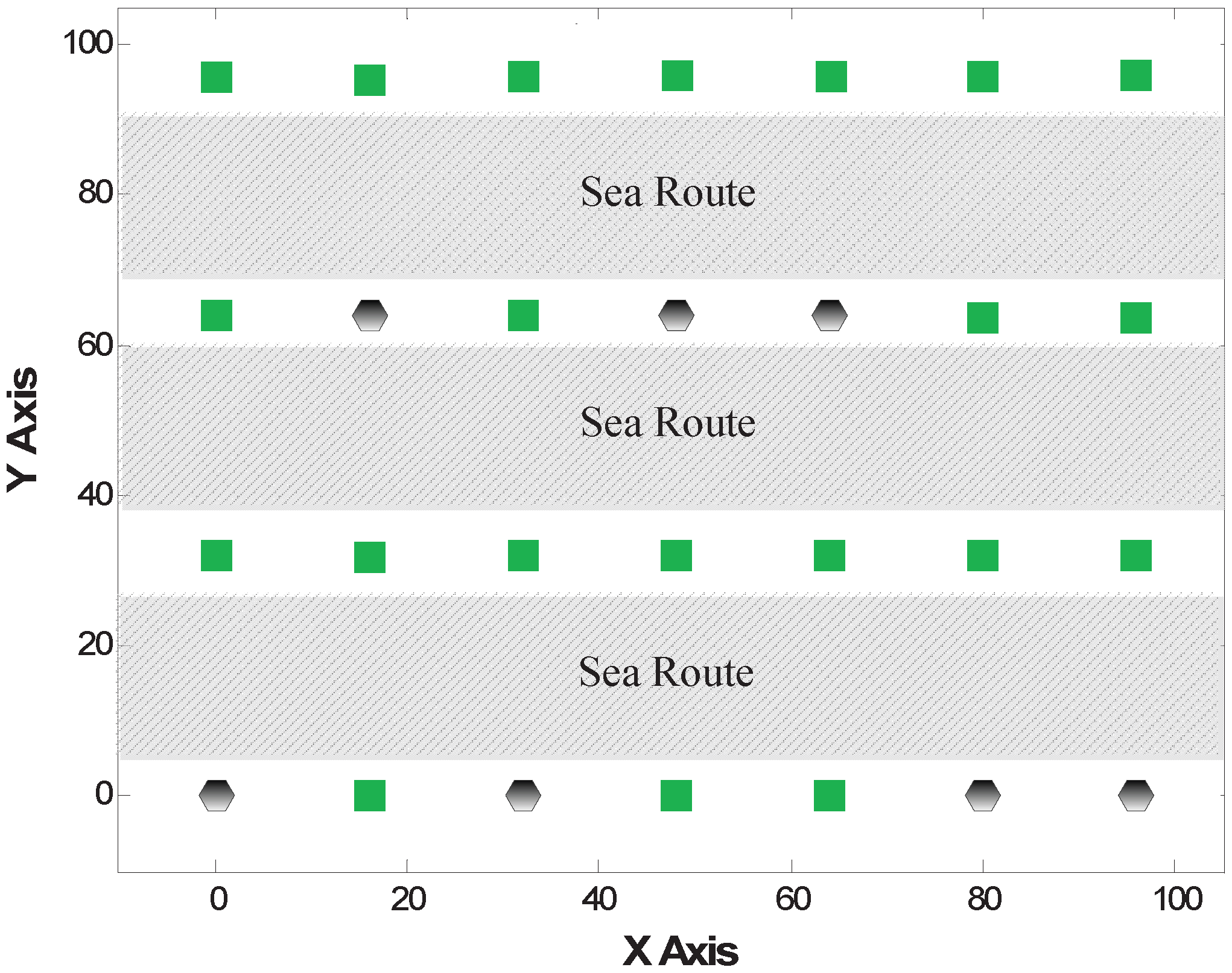
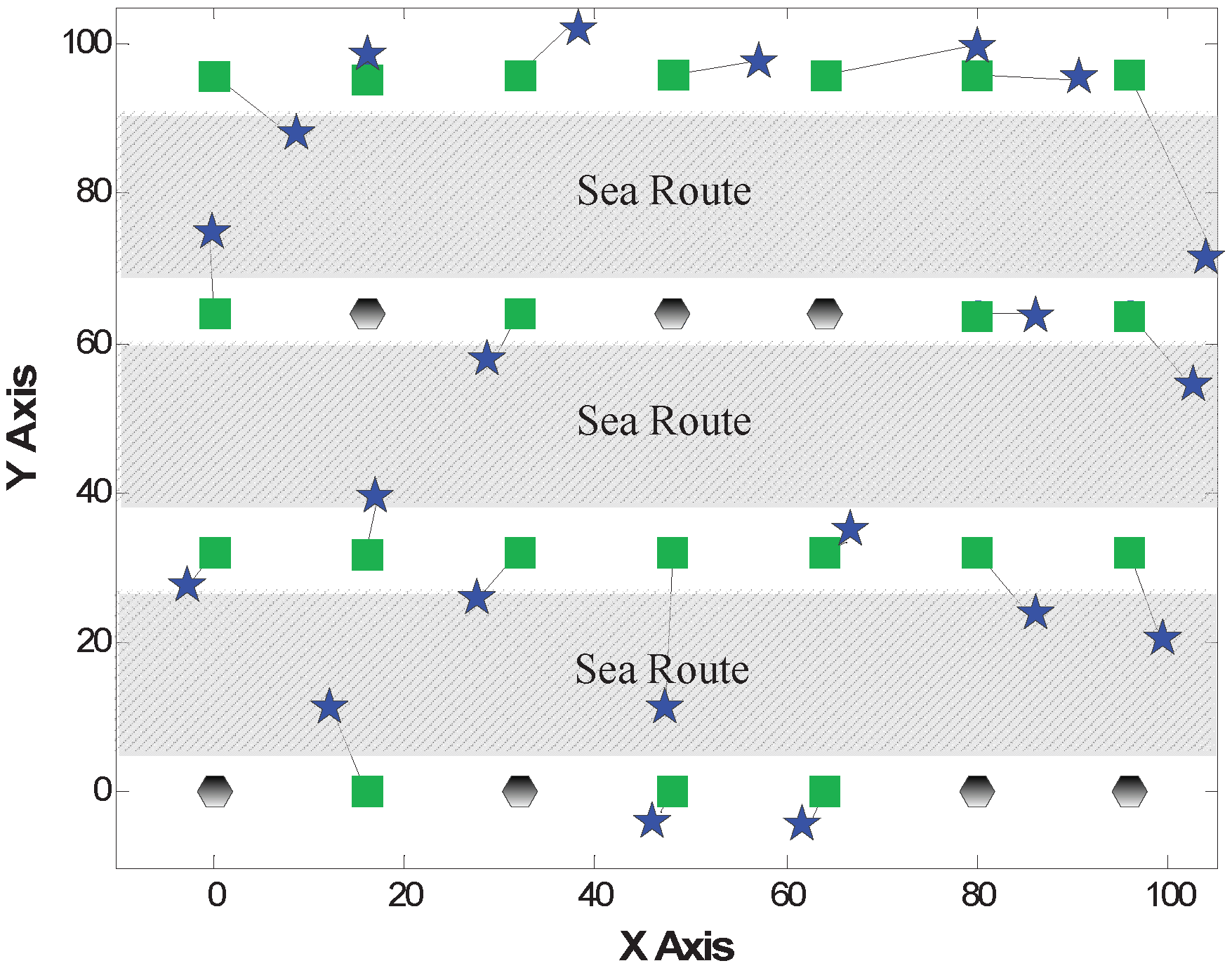
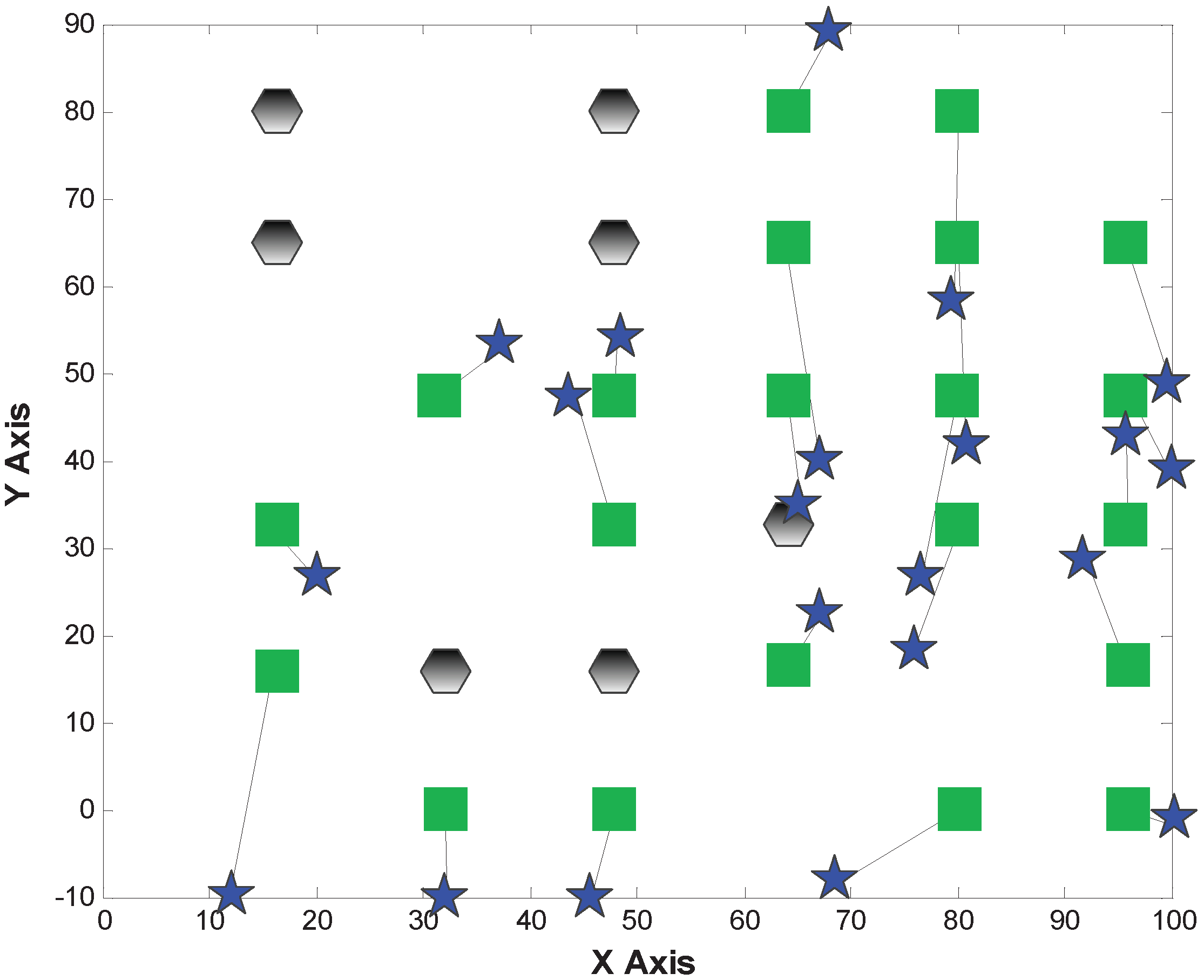
5.2. Zonal Network
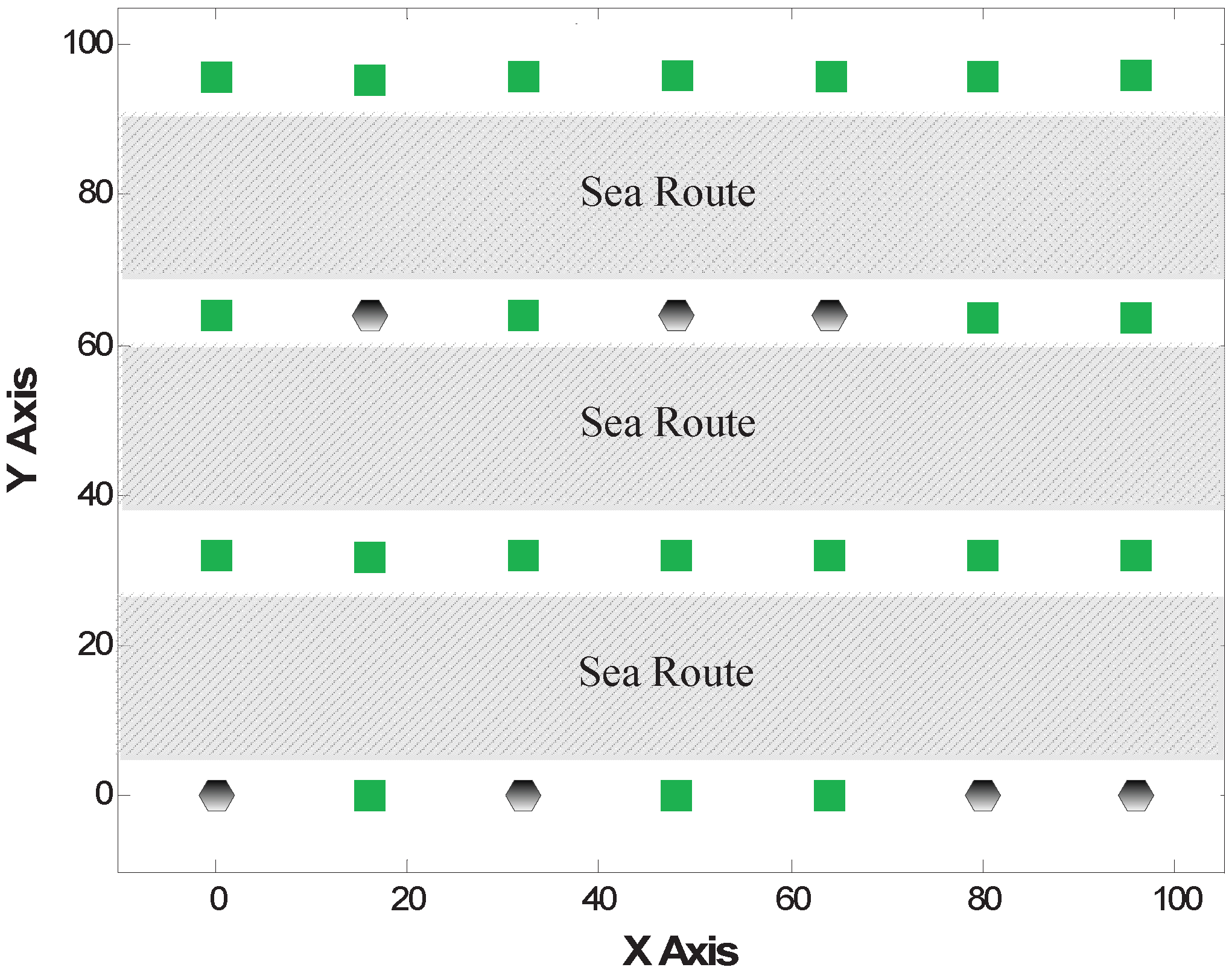
5.2.1. Distance Correlation in a Zonal Network

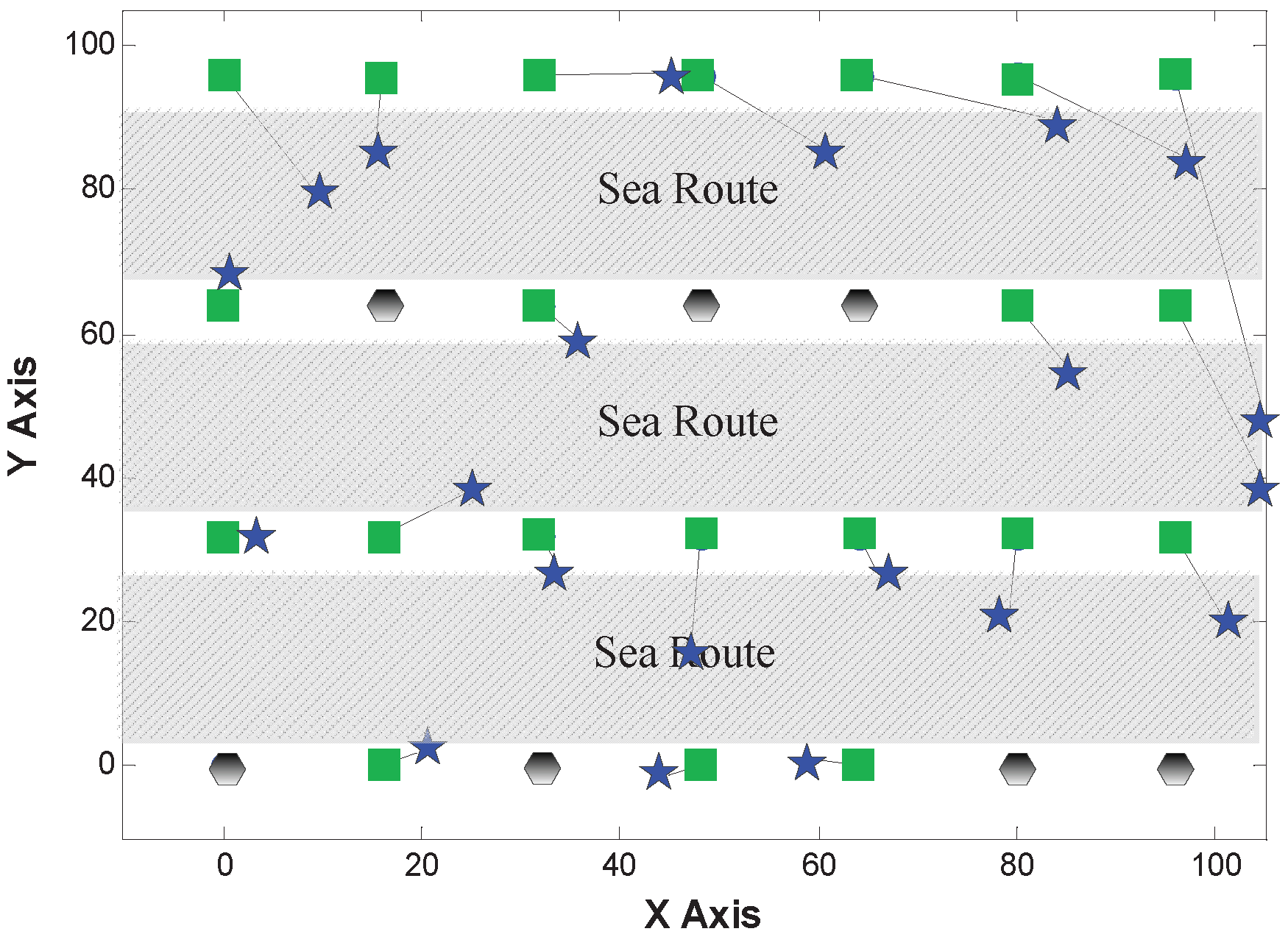
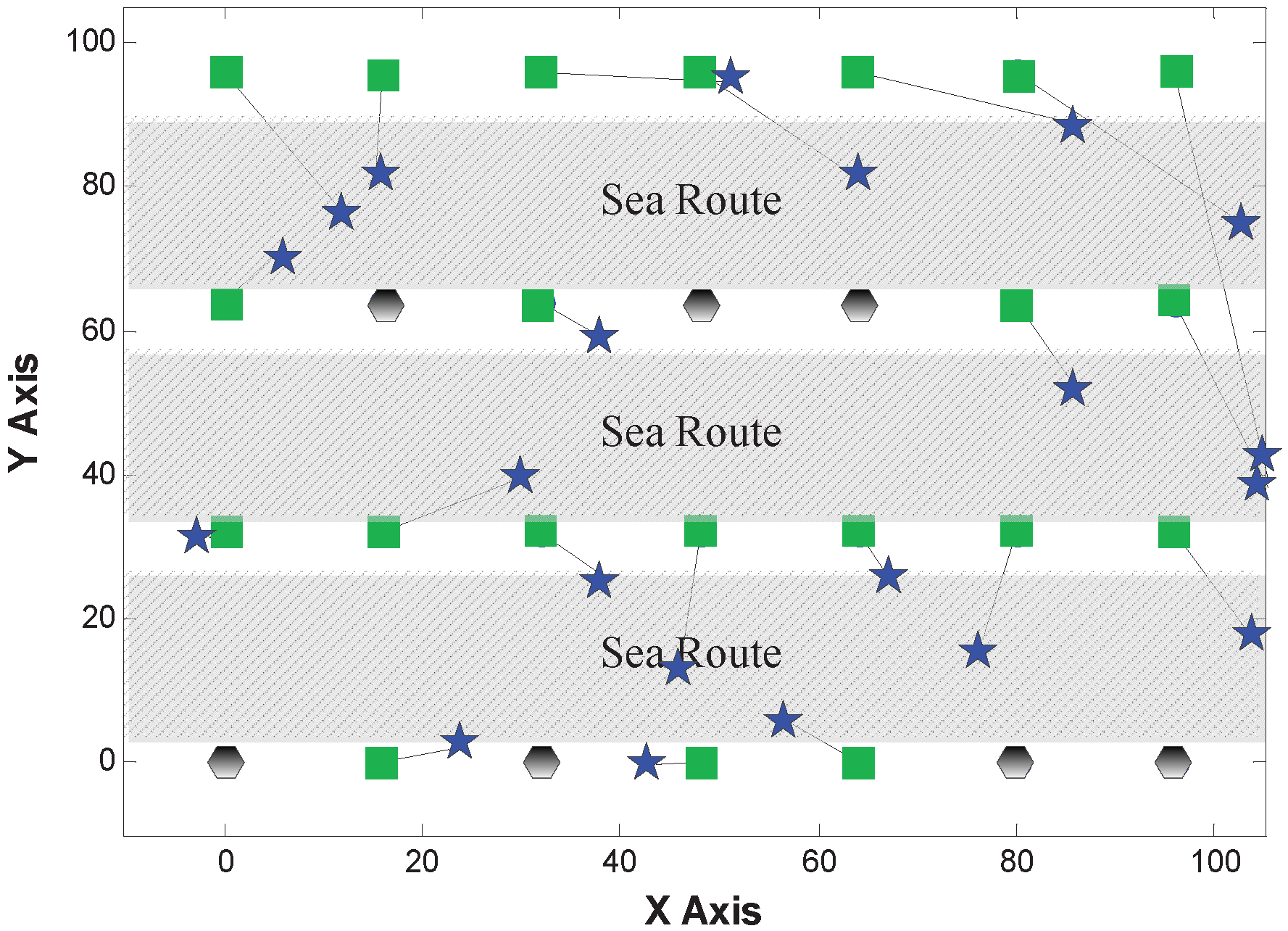
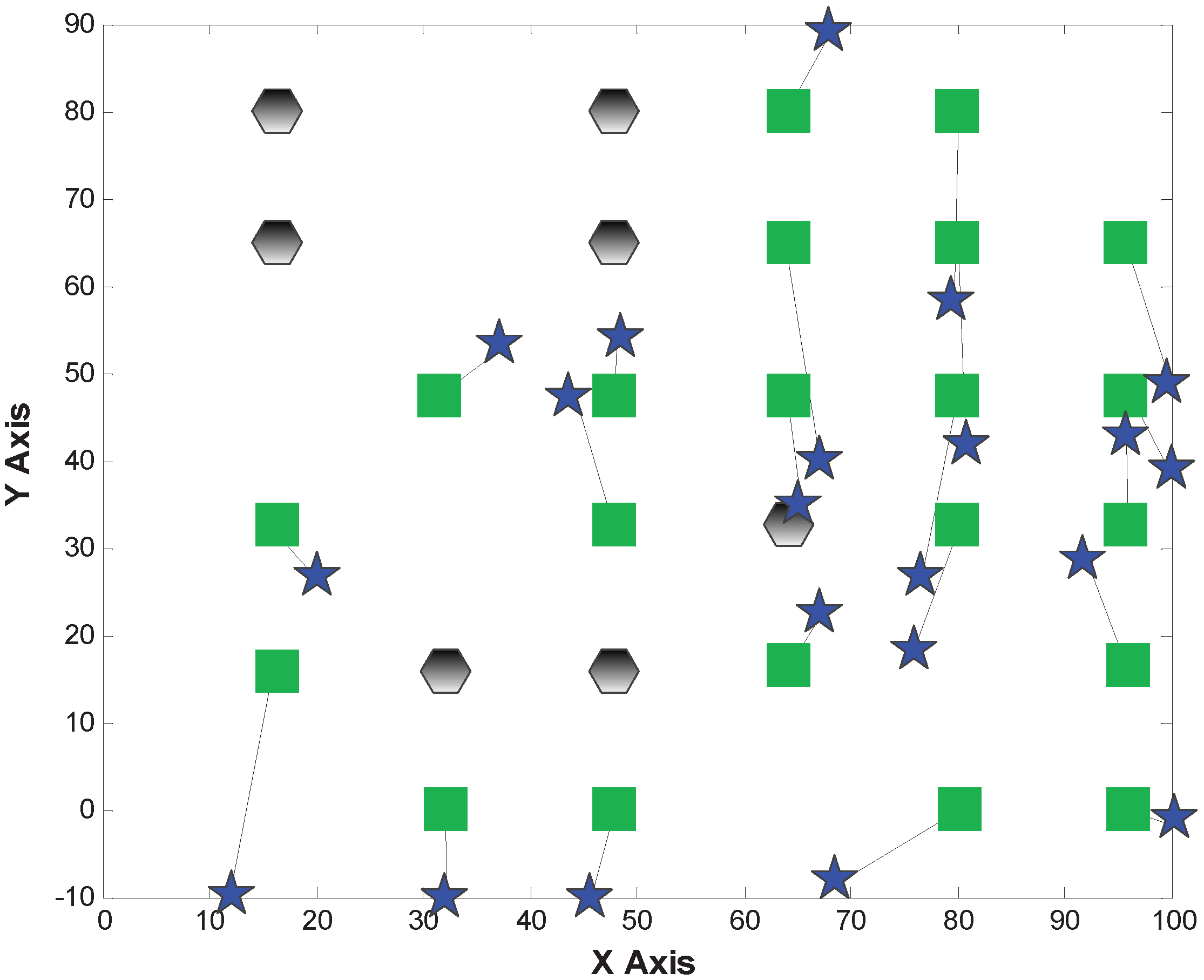
5.2.2. Comparison of Localization Results


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Error | MDS-Hop | MDS-SSLE | MDS-SSLM |
|---|---|---|---|
| Median Error | 4.9569 | 6.1568 | 3.1087 |
| Max Error | 16.0075 | 14.5258 | 7.5756 |
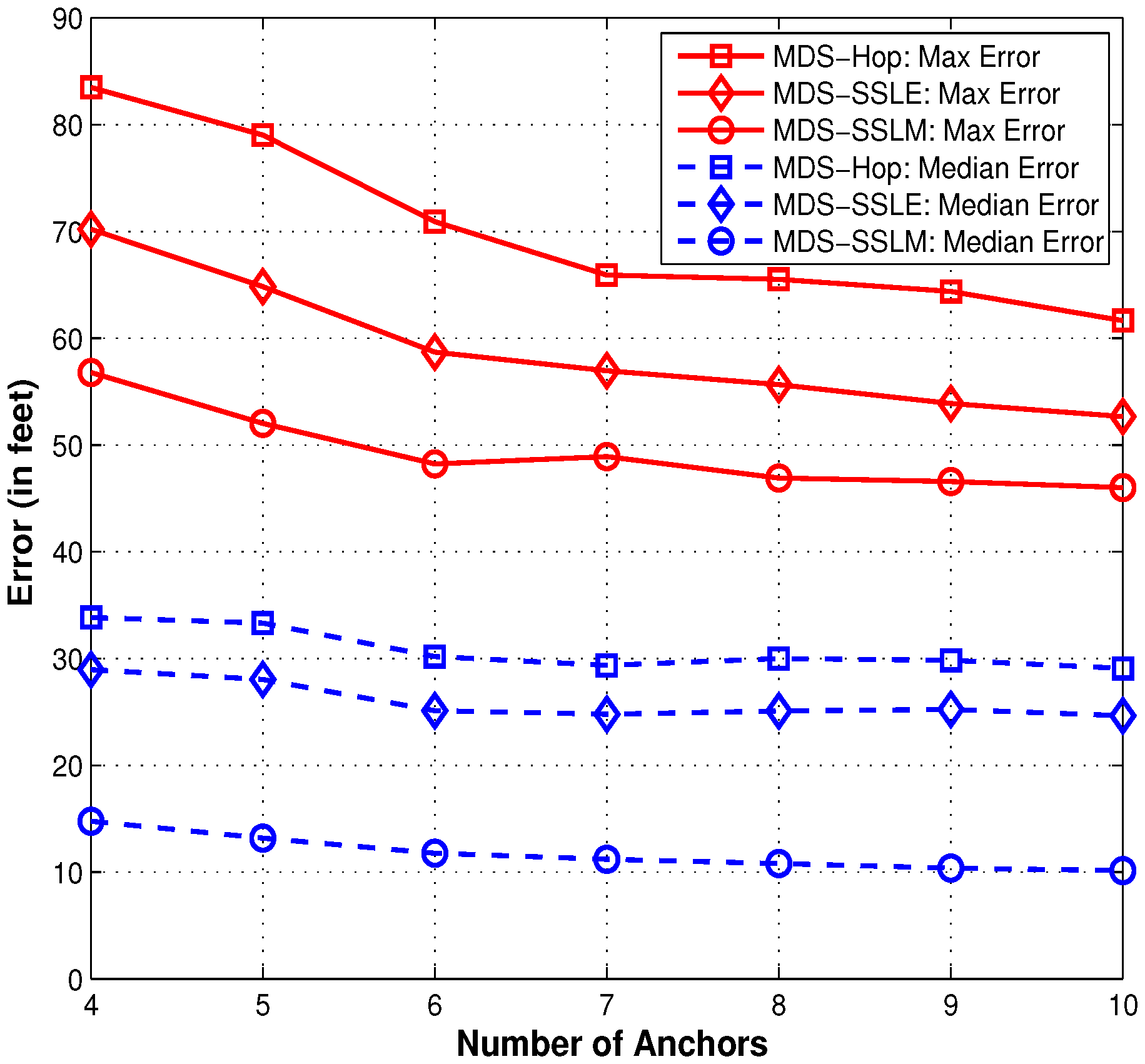
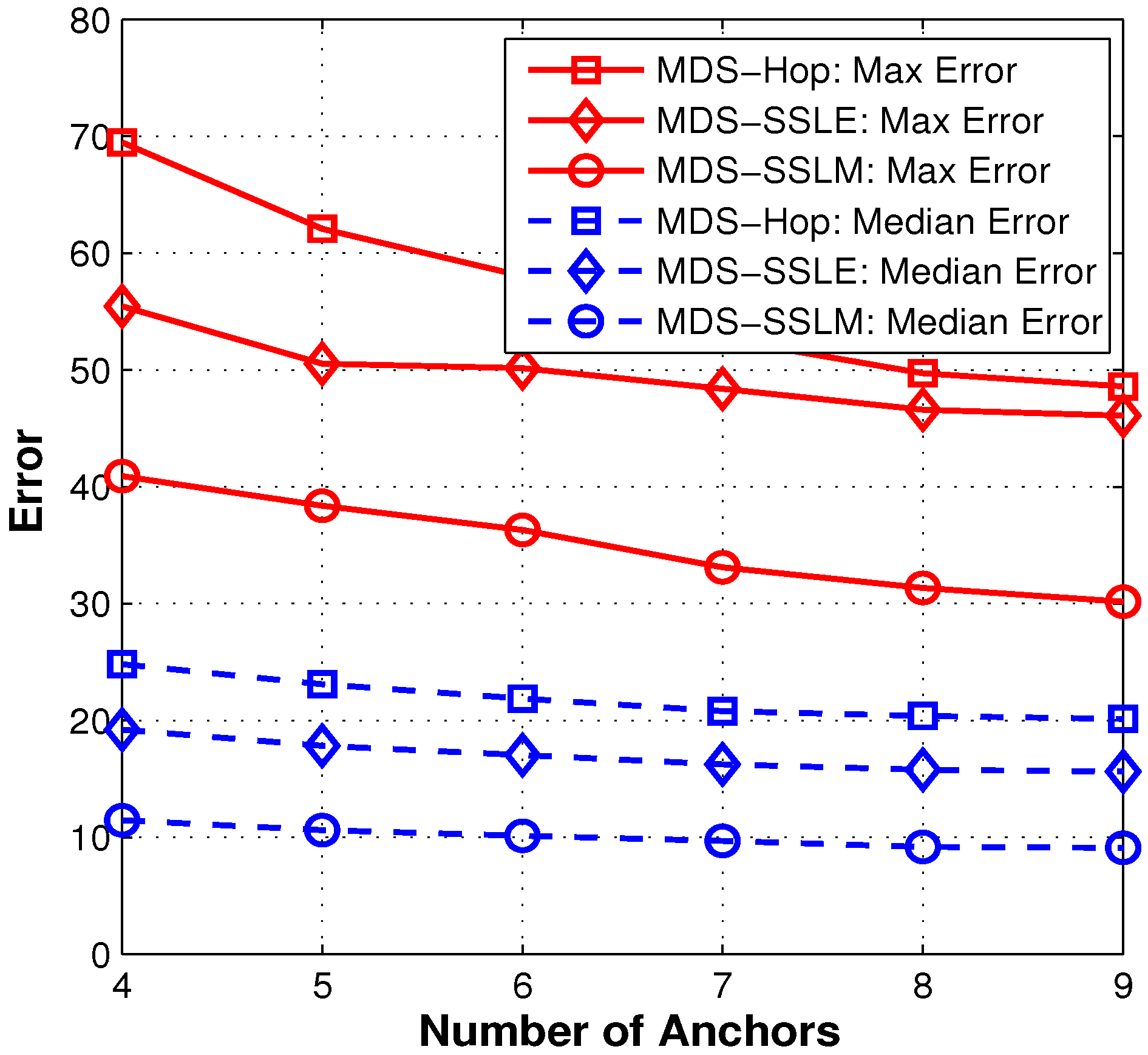
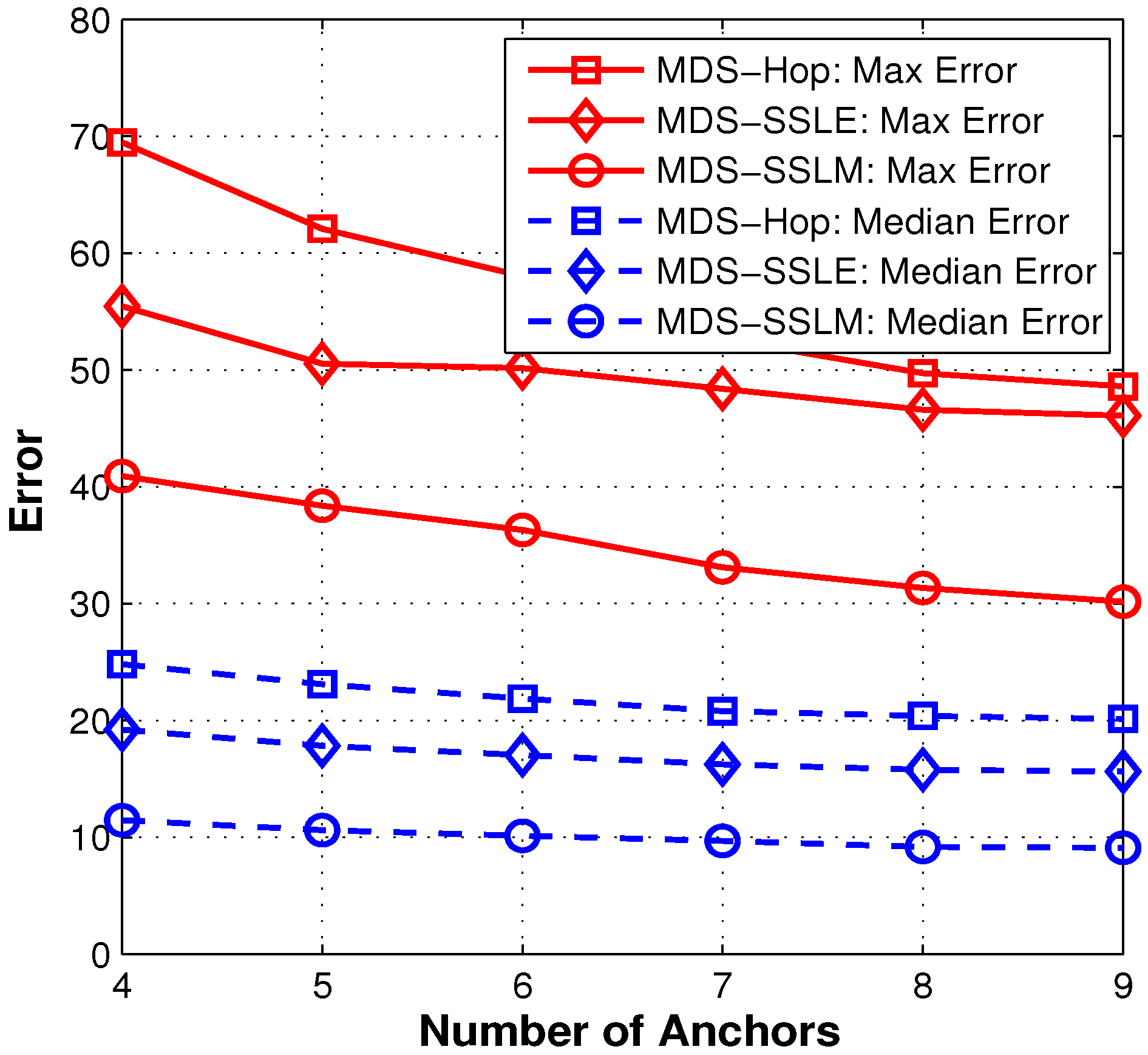
5.2.3. Impact of Anchor Density in a Zonal Network
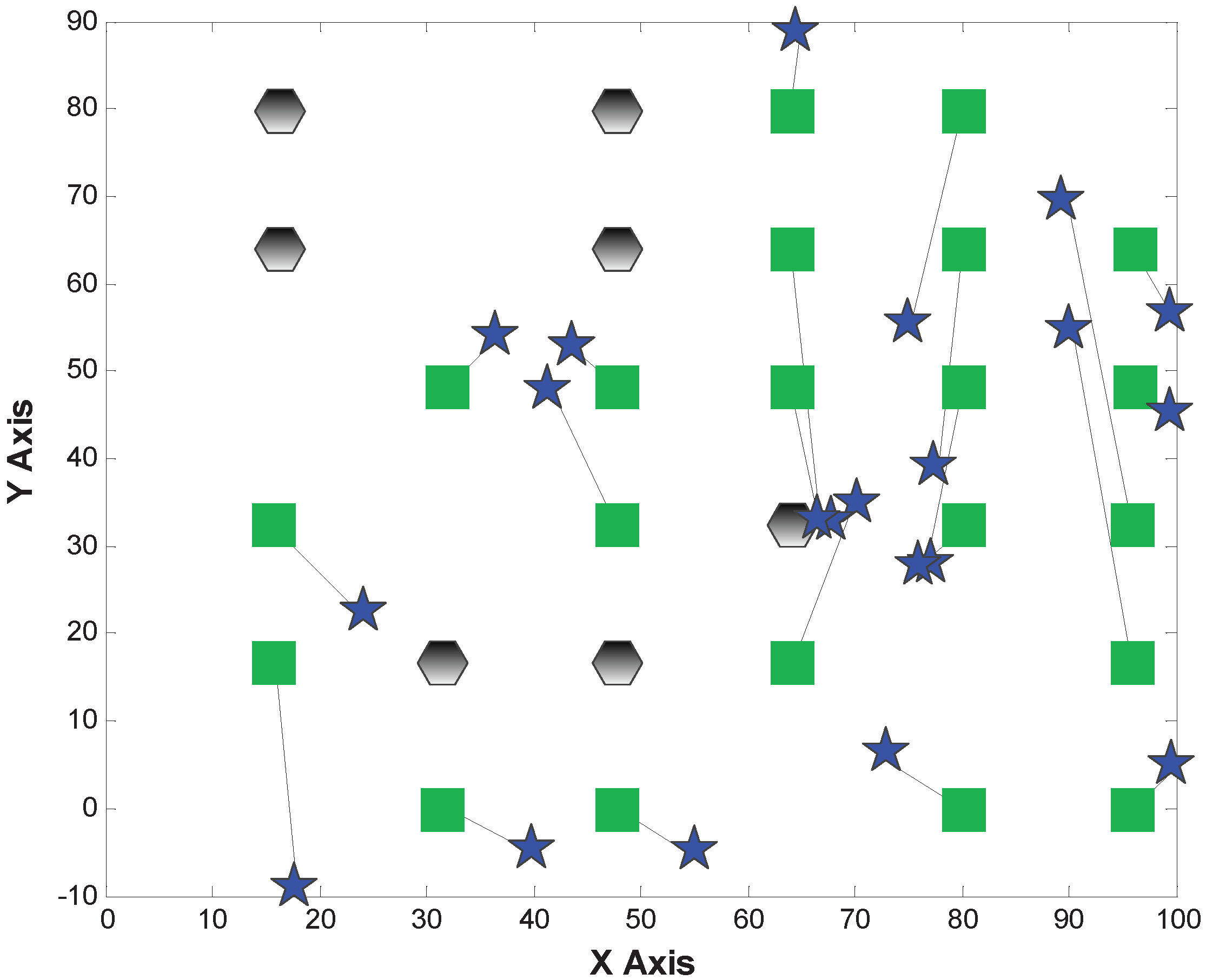
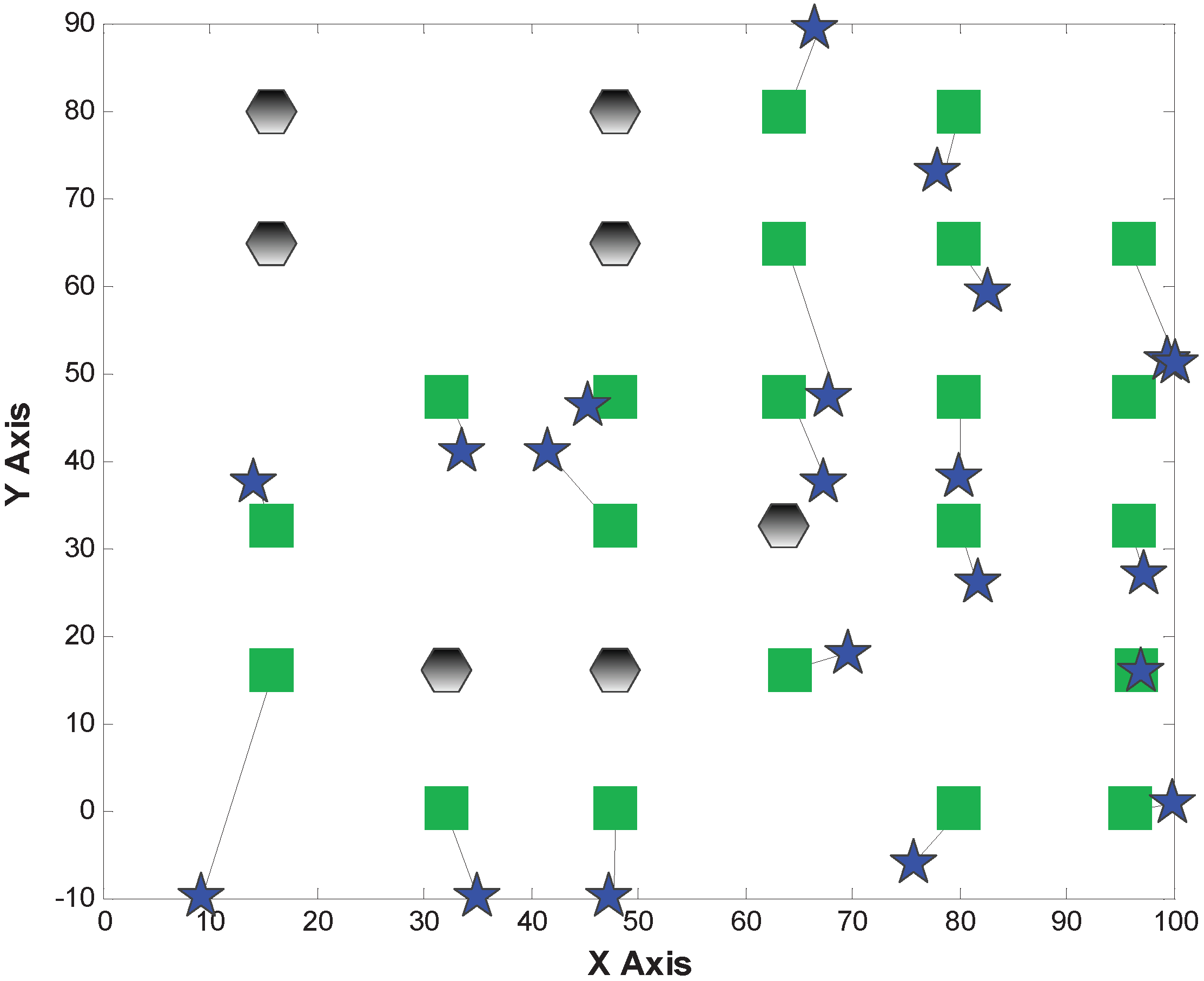
5.3. Non-Regular Network
5.3.1. Distance Correlation in a Non-Regular Network
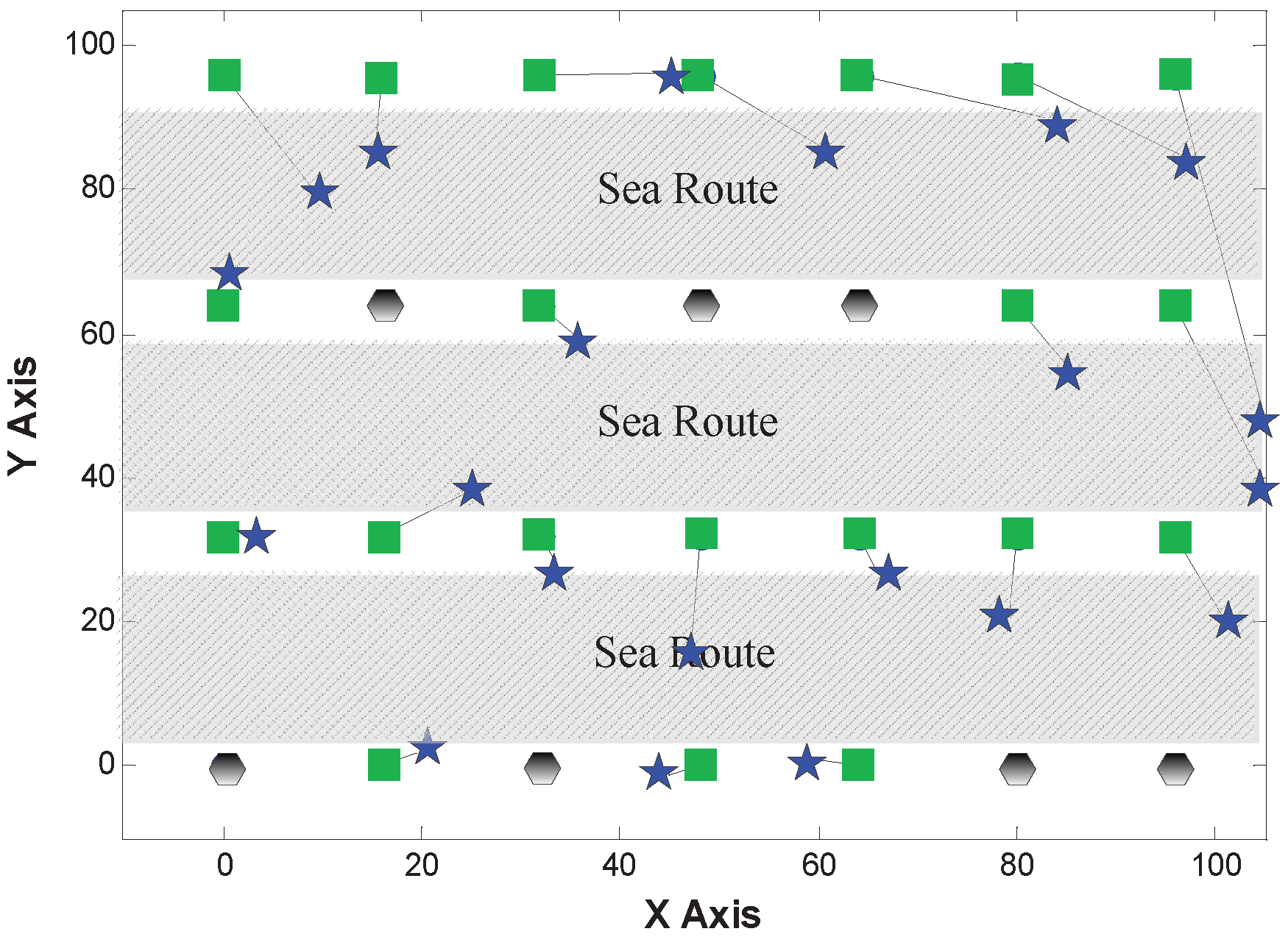
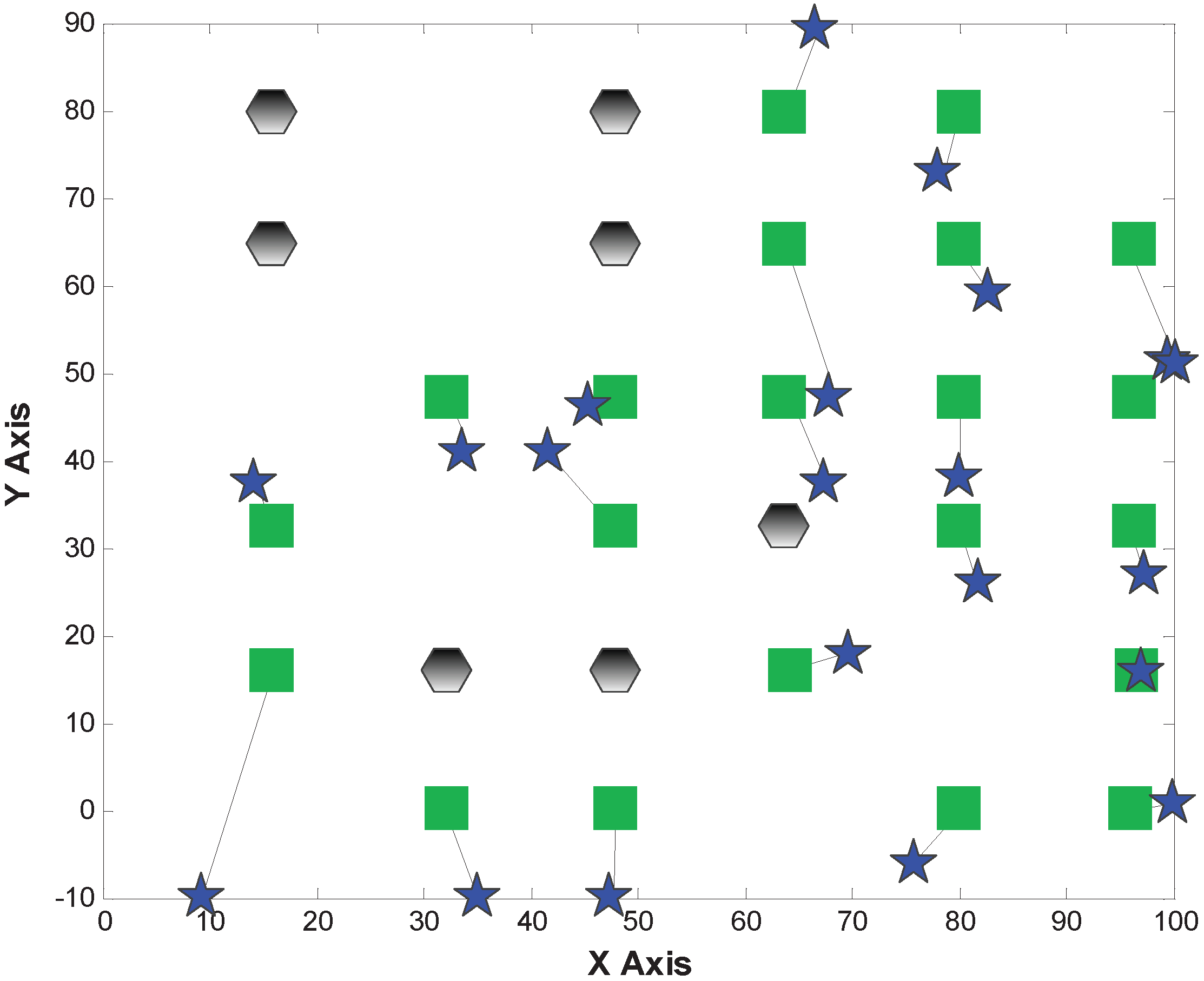
5.3.2. Comparison of Localization Results

| Error | MDS-Hop | MDS-SSLE | MDS-SSLM |
|---|---|---|---|
| Median Error | 6.0175 | 4.4897 | 2.2011 |
| Max Error | 18.7441 | 15.7196 | 9.1300 |
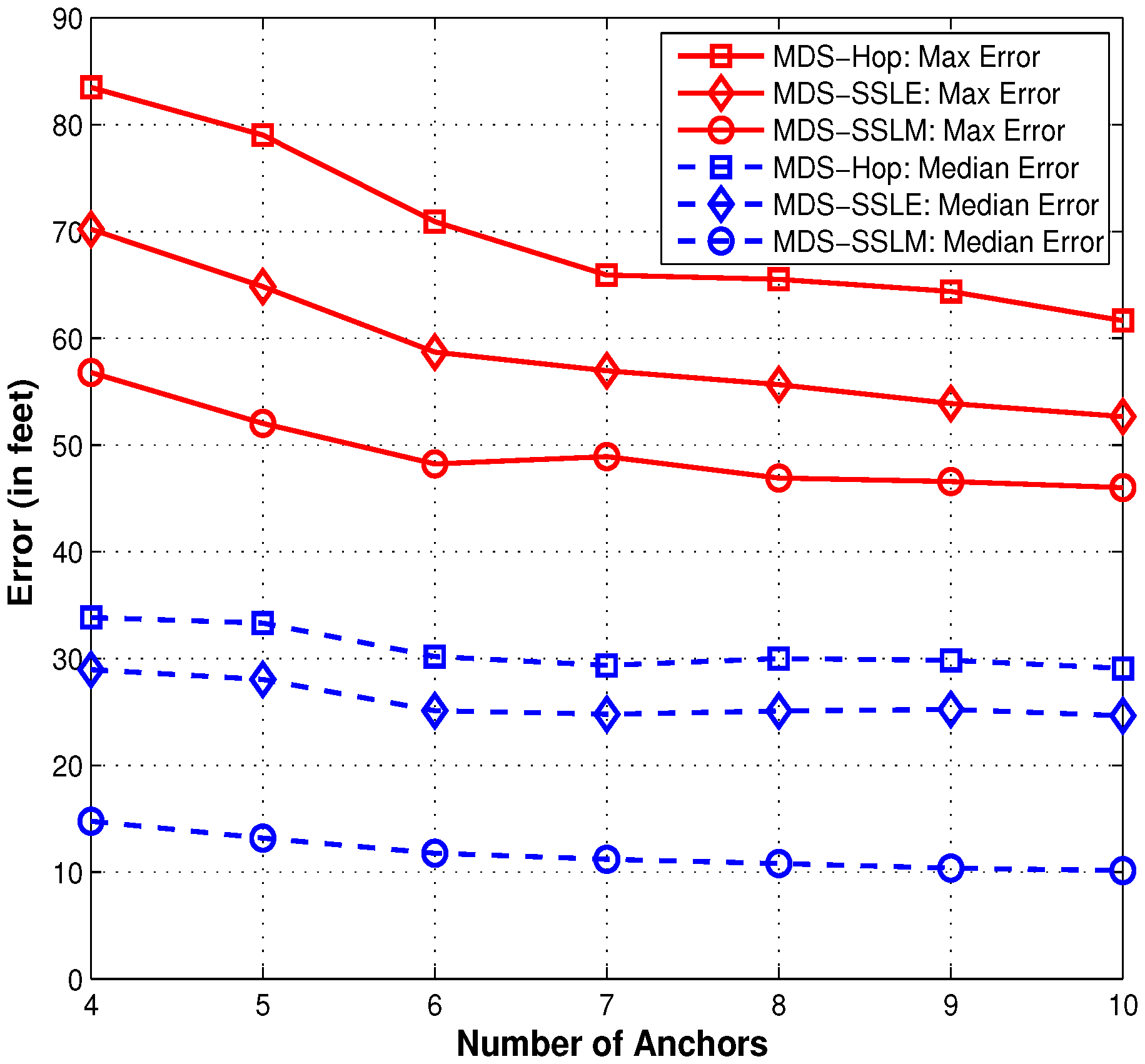
5.3.3. Impact of Anchor Density in a Non-Regular Network
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Xu, G.B.; Shen, W.M.; Wang, X.B. Applications of wireless sensor networks in marine environment monitoring: A survey. Sensors 2014, 14, 16932–16954. [Google Scholar] [CrossRef] [PubMed]
- Liu, K.B.; Yang, Z.; Li, M.; Guo, Z.W.; Guo, Y.; Hong, F.; Yang, X.H.; He, Y.; Feng, Y.; Liu, Y.H. Ocean sense: Monitoring the sea with wireless sensor networks. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2010, 14, 7–9. [Google Scholar] [CrossRef]
- Liu, Y.H.; Liu, K.B.; Li, M. Passive diagnosis for wireless sensor networks. IEEE/ACM Trans. Netw. 2010, 4, 1132–1144. [Google Scholar]
- Xu, B.; Sun, G.D.; Yu, R.; Yang, Z. High-accuracy TDOA-based localization without time synchronization. IEEE Trans. Parallel Distrib. Syst. 2013, 24, 1567–1576. [Google Scholar] [CrossRef]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-building RF-based user location and tracking system. In Proceedings of the IEEE International Conference on Computer Communications (INFOCOM 2000), Tel Aviv, Israel, 26–30 March 2000; pp. 775–784.
- Niculescu, D.; Nath, B. Ad hoc positioning system (APS) using AOA. In Proceedings of the IEEE International Conference on Computer Communications (INFOCOM 2003), San Francisco, CA, USA, 30 March–3 April 2003; pp. 1734–1743.
- Savvides, A.; Han, C.-C.; Strivastava, M.B. Dynamic fine-grained localization in ad-hoc networks of sensors. In Proceedings of the 7th Annual International Conference on Mobile Computing and Networking (MOBICOM 2001), Rome, Italy, 16–21 July 2001; pp. 166–179.
- Cheng, X.Z.; Thaeler, A.; Xue, G.L.; Chen, D.C. TPS: A time-based positioning scheme for outdoor wireless sensor networks. In Proceedings of the IEEE International Conference on Computer Communications (INFOCOM 2004), Hongkong, China, 7–11 March 2004; pp. 2685–2696.
- Priyantha, N.B.; Chakraborty, A.; Balakrishnan, H. The Cricket location-support system. In Proceedings of the 6th Annual International Conference on Mobile Computing and Networking (MOBICOM 2000), Boston, MA, USA, 6–11 August 2000; pp. 32–43.
- Whitehouse, K.; Karlof, C.; Culler, D. A practical evaluation of radio signal strength for ranging-based localization. ACM Mob. Comput. Commun. Rev. 2007, 11, 41–52. [Google Scholar] [CrossRef]
- Lederer, S.; Wang, Y.; Gao, J. Connectivity-based localization of large scale sensor networks with complex shape. In Proceedings of the IEEE International Conference on Computer Communications (INFOCOM 2008), Phoenix, AZ, USA, 13–19 April 2008; pp. 1643–1671.
- Nagpal, R.; Shrobe, H.; Bachrach, J. Organizing a global coordinate system from local information on an ad hoc sensor network. In Proceedings of the 2nd International Workshop on Information Processing in Sensor Networks (IPSN 2003), Palo Alto, CA, USA, 22–23 April 2003; pp. 333–348.
- Savarese, C.; Rabaey, J.M.; Langendoen, K. Robust positioning algorithms for distributed ad-hoc wireless sensor networks. In Proceedings of the General Track of the Annual Conference on USENIX Annual Technical Conference, Monterey, CA, USA, 10–15 June 2002; pp. 317–327.
- He, T.; Huang, C.D.; Blum, B.M.; Stankovic, J.A. Range-free localization schemes for large-scale sensor networks. In Proceedings of the 9th Annual International Conference on Mobile Computing and Networking (MOBICOM 2003), San Diego, CA, USA, 14–19 September 2003; pp. 81–95.
- Doherty, L.; Pister, K.S.J.; El Ghaoui, L. Convex position estimation in wireless sensor networks. In Proceedings of the IEEE International Conference on Computer Communications (INFOCOM 2001), Anchorage, AK, USA, 22–26 April 2001; pp. 1655–1663.
- Bulusu, N.; Heidemann, J.; Estrin, D.; Tran, T. Self-configuring localization systems: Design and experimental evaluation. ACM Trans. Embed. Comput. 2004, 3, 24–60. [Google Scholar] [CrossRef]
- Zhong, Z.G.; He, T. Node localization with uncontrolled events. ACM Trans. Embed. Comput. 2012, 11, 668–679. [Google Scholar]
- Stoleru, R.; He, T.; Stankovic, J.A.; Luebke, D. A high-accuracy, low cost localization system for wireless sensor networks. In Proceedings of the 3rd International Conference on Embedded Networked Sensor Systems (SENSYS 2005), San Diego, CA, USA, 2–4 November 2005; pp. 13–26.
- Jeong, J.; Guo, S.; He, T.; Du, D.H.C. Autonomous passive localization algorithm for road sensor networks. IEEE Trans. Comput. 2011, 60, 1622–1637. [Google Scholar] [CrossRef]
- Guo, Z.W.; Chen, P.P.; Zhang, H.; Jiang, M.X.; Li, C.R. IMA: An integrated monitoring architecture with sensor networks. IEEE Trans. Instrum. Meas. 2012, 61, 1287–1295. [Google Scholar] [CrossRef]
- Wu, C.S.; Yang, Z.; Zhou, Z.M.; Qian, K.; Liu, Y.H.; Liu, M.Y. PhaseU: Real-time LOS identification with WiFi. In Proceedings of the IEEE International Conference on Computer Communications (INFOCOM 2015), Kowloon, Hong Kong, China, 26 April–1 May 2015; pp. 2038–2046.
- Wen, Y.T.; Tian, X.H.; Wang, X.B.; Lu, S.W. Fundamental limits of RSS fingerprinting based indoor localization. In Proceedings of the IEEE International Conference on Computer Communications (INFOCOM 2015), Kowloon, Hong Kong, China, 26 April–1 May 2015; pp. 2479–2487.
- Chen, P.P.; Zhong, Z.G.; He, T. Bubble trace: Mobile target tracking under insufficient anchor coverage. In Proceedings of the IEEE International Conference on Distributed Computing Systems (ICDCS 2011), Minneapolis, MN, USA, 20–24 June 2011; pp. 770–779.
- Goldenberg, D.K.; Bihler, P.; Cao, M.; Fang, J.; Anderson, B.D.O.; Morse, A.S.; Yang, Y.R. Localization in sparse networks using sweeps. In Proceedings of the 12th Annual International Conference on Mobile Computing and Networking (MOBICOM 2006), Los Angeles, CA, USA, 24–29 September 2006; pp. 110–121.
- Yang, Z.; Liu, Y.H. Quality of trilateration: Confidence-based iterative localization. In Proceedings of the IEEE International Conference on Distributed Computing Systems (ICDCS 2008), Beijing, China, 17–20 June 2008; pp. 446–453.
- Cheng, X.Z.; Shu, H.N.; Liang, Q.L.; Du, D.H.-C. Silent positioning in underwater acoustic sensor networks. IEEE Trans. Veh. Technol. 2008, 57, 1756–1766. [Google Scholar] [CrossRef]
- Chang, H.-L.; Tian, J.-B.; Lai, T.-T.; Chu, H.-H.; Huang, P. Spinning beacons for precise indoor localization. In Proceedings of the 6th ACM Conference on Embedded Networked Sensor Systems (SENSYS 2008), Raleigh, NC, USA, 5–7 November 2008; pp. 127–140.
- Zhong, Z.G.; He, T. MSP: Multi-sequence positioning of wireless sensor nodes. In Proceedings of the 5th ACM Conference on Embedded Networked Sensor Systems (SENSYS 2007), Sydney, Australia, 6–9 November 2007; pp. 15–28.
- Wang, C.; Xiao, L. Locating sensors in concave areas. In Proceedings of the IEEE International Conference on Computer Communications (INFOCOM 2006), Barcelona, Spain, 23–29 April 2006; pp. 1645–1656.
- Niculescu, D.; Nath, B. DV based positioning in ad-hoc networks. Telecommun. Syst. Model. Anal. Des. Manag. 2003, 22, 267–280. [Google Scholar] [CrossRef]
- Shang, Y.; Ruml, W.; Zhang, Y.; Fromherz, M.P.J. Localization from mere connectivity. In Proceedings of the 4th ACM International Symposium on Mobile Ad Hoc Networking and Computing (MOBIHOC 2003), Annapolis, MD, USA, 1–3 June 2003; pp. 201–212.
- Chen, P.P.; Ma, H.L.; Gao, S.W.; Huang, Y. Modified Extended Kalman Filtering for Tracking with Insufficient and Intermittent Observations. Math. Probl. Eng. 2015, 981727:1–981727:9. [Google Scholar] [CrossRef]
- Zhong, Z.G.; He, T. RSD: A metric for achieving range-free localization beyond connectivity. IEEE Trans. Parallel Distrib. Syst. 2011, 22, 1943–1951. [Google Scholar] [CrossRef]
- Xi, W.; He, Y.; Liu, Y.H.; Zhao, J.Z.; Mo, L.F.; Yang, Z.; Wang, J.L.; Li, X.Y. Locating sensors in the wild: Pursuit of ranging quality. In Proceedings of the 8th ACM Conference on Embedded Networked Sensor Systems (SENSYS 2010), Zurich, Switzerland, 3–5 November 2010; pp. 295–308.
- Cormen, T.H.; Leiserson, C.E.; Rivest, R.L.; Stein, C. Introduction to Algorithms, 2nd ed.; MIT Press: Cambridge, MA, USA, 2003. [Google Scholar]
- Greenacre, M.J. Theory and Applications of Correspondence Analysis; Academic Press: London, UK, 1984. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, P.; Ma, H.; Gao, S.; Huang, Y. SSL: Signal Similarity-Based Localization for Ocean Sensor Networks. Sensors 2015, 15, 29702-29720. https://doi.org/10.3390/s151129702
Chen P, Ma H, Gao S, Huang Y. SSL: Signal Similarity-Based Localization for Ocean Sensor Networks. Sensors. 2015; 15(11):29702-29720. https://doi.org/10.3390/s151129702
Chicago/Turabian StyleChen, Pengpeng, Honglu Ma, Shouwan Gao, and Yan Huang. 2015. "SSL: Signal Similarity-Based Localization for Ocean Sensor Networks" Sensors 15, no. 11: 29702-29720. https://doi.org/10.3390/s151129702