2.2. Self-Noise of Angular Motion Sensor at Low Frequencies
In accordance with the physical transduction of the mechanical effect into the liquid flow through the transductive element, molecular electronic angular motion sensors are accelerometers. All the above considered, the equation of liquid pressure in the channel of the studied angular accelerometer can be presented as follows:
where
is the system hydrodynamic resistance,
S is the channel cross-section area,
R is the toroidal channel radius,
ρ is the electrolyte density,
is the angular acceleration of the accelerometer body under external effects, q is the liquid flow.
After Fourier transformation of Equation (1), we can easily define the transfer function of the mechanical system (transforming external mechanical movement (angular acceleration) into the liquid flow through the transducer) of the studied sensor:
where
is the hydrodynamic frequency, above which transfer function of the mechanical system reduces proportionally to ω
−1 [
21]. In realistic parameters the hydrodynamic resistance defining the value of
for this system is so high that
transfer function decline begins at the frequency range of tens and even hundreds of Hz. That is why for lower frequencies mechanical transfer function will be considered a constant.
Now lets’ analyze self-noise. For the studied frequency range, the self-noise of free-design molecular electronic sensor, in accordance with the formulation in [
22], is defined by thermal hydrodynamic noise and geometric noise. Consequently, the mathematical expression for self-noise of a molecular electronic angular motion sensor appears as follows:
In addition to the previous expressions, there are the following terms:
is the power spectral density of angular movement measurer self-noise in units of input angular acceleration,
is the Boltzmann’s constant,
is the absolute temperature,
is the conversion efficiency variation between the transductive element channels [
22].
For the foregoing peculiarities of the conversion function of the mechanical effect into the electric current of the studied angular motion sensor and the Equation (3), it follows that at low frequencies the spectral noise density of molecular electronic angular motion sensor must be flat in units of applied angular acceleration.
2.3. Self-Noise of Angular Motion Sensor at Medium and High Frequencies
Studies on angular motion sensor self-noise at medium and high frequencies were performed in [
20]. One of the main results of that work was the proof that the noise of the operational amplifier of the concurring electronic network prevails upon other kinds of noise at frequencies of above several tens (50–60) Hz, under the condition that the sensor impedance selection is equal to 40 Ohms. In [
20], the indicated value was defined by the condition of the best correspondence to the experimental data. According to [
20], electronic self-noise is mainly generated at an input stage of the electronics, where it is the result of the voltage noise of the operational amplifier input. After that simplification, the expression for power spectral density of electronic self-noise in units of applied angular acceleration can be defined as follows:
Herein is the circular frequency, is the noise power spectral density for input stage amplifier, is the transducer output impedance, is the feedback resistance of input stage amplifier, is the angular motion sensor conversion coefficient (V/rad/s2).
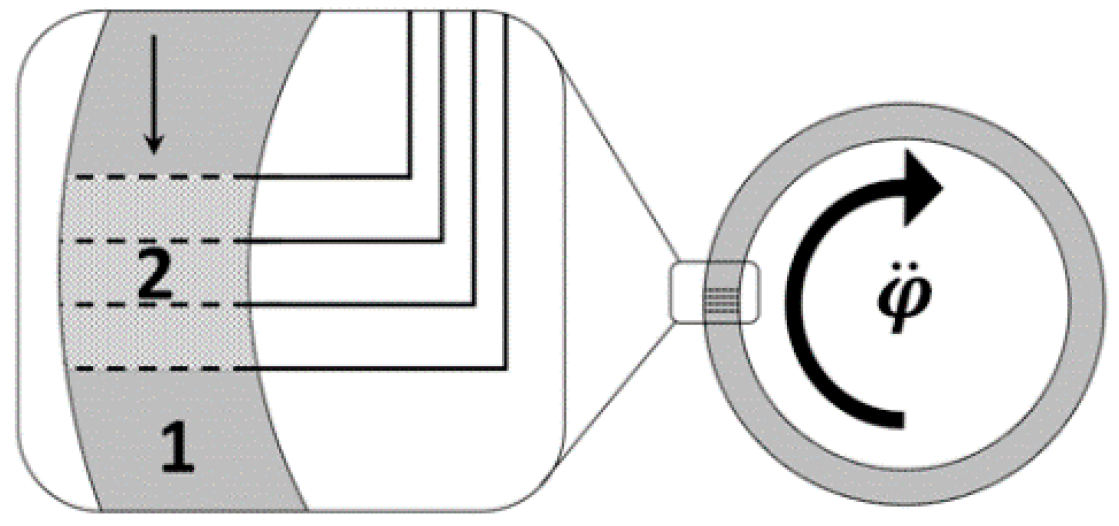
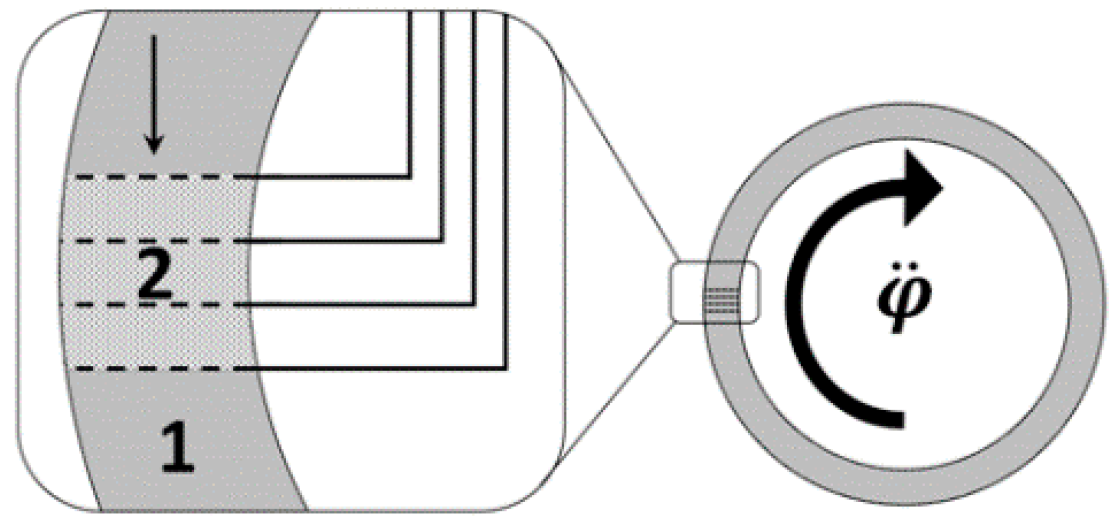
The direct measurement of impedance was performed under the diagram presented in
Figure 2. A molecular electronic transducer, as discussed earlier, presents four reticulate electrodes made of platinum net and installed perpendicularly to the body axis with a certain gap which is supplied by the perforated baffle plates. To set the molecular electronic cell direct current mode, a constant bias was applied from the bias source U0 (about 300 mV) to the coupled anodes (A1, A2 in
Figure 2). The frequency characteristics of the transducer impedance were studied by applying bias voltage amplitude from the generator with comparatively little (≈10% of bias source U0) alternating voltage U1 to the one of the cathodes (K1 in
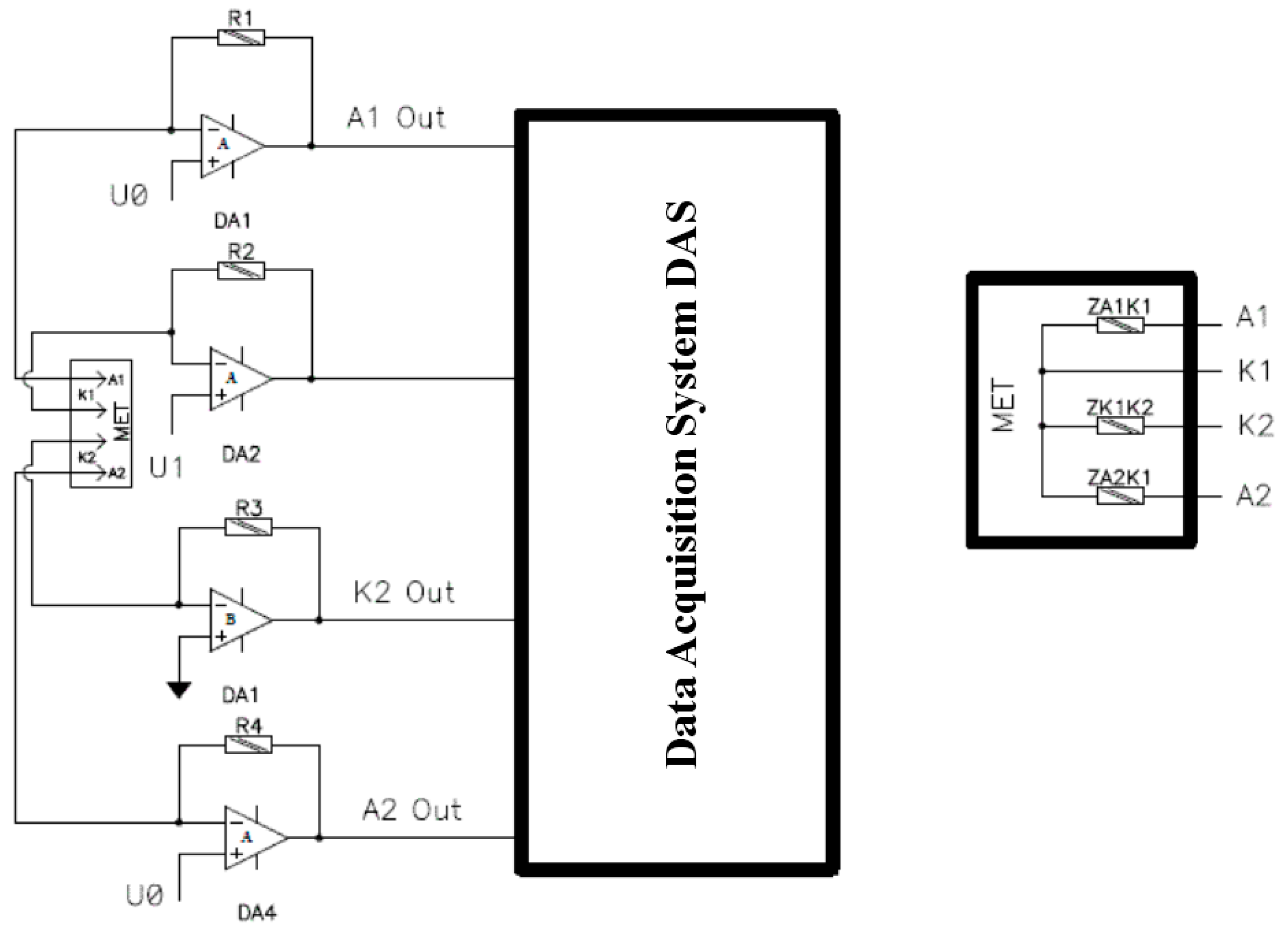
Figure 2). To generate the alternating voltage at the studied frequencies, a FG-7002C generator was used. The current through over three electrodes was discarded from the molecular electronic cell and applied at low-noise current-to-voltage converters DA1-4, where input resistance is essentially lower than of the apparent sensors dynamic resistance. To collect the data, high resolution (24 bit) sigma-delta AD converter was used (Data Acquisition System, or DAS). To calculate the impedance, the values of the corresponding frequencies first harmonics at signal spectrum were used. According to the insertion shown in
Figure 2, the whole output impedance
of MET consists of three parallel connected impedances between A1-K1, A2-K1, K1-K2, see equation below:
Such a measurement scheme simulates the sensor equivalent output impedance and its influence on the electronic noise generated by the first stage operational amplifier according to Equation (4). In [
13,
23], it was experimentally shown that in the medium frequency range (from ones to tens of Hz) for the molecular electronic sensor without integral liquid flow (encapsulated sensor) through the converter, spectral dependence of noise on frequency is as follows:
This kind of noise is conditioned by the occurrence of convective flows inside the transducer.
Figure 2.
Installation diagram and equivalent electric MET scheme (insertion) for the measurement of molecular electronic angular motion transducer impedance.
Figure 2.
Installation diagram and equivalent electric MET scheme (insertion) for the measurement of molecular electronic angular motion transducer impedance.
2.4. Experimental Results
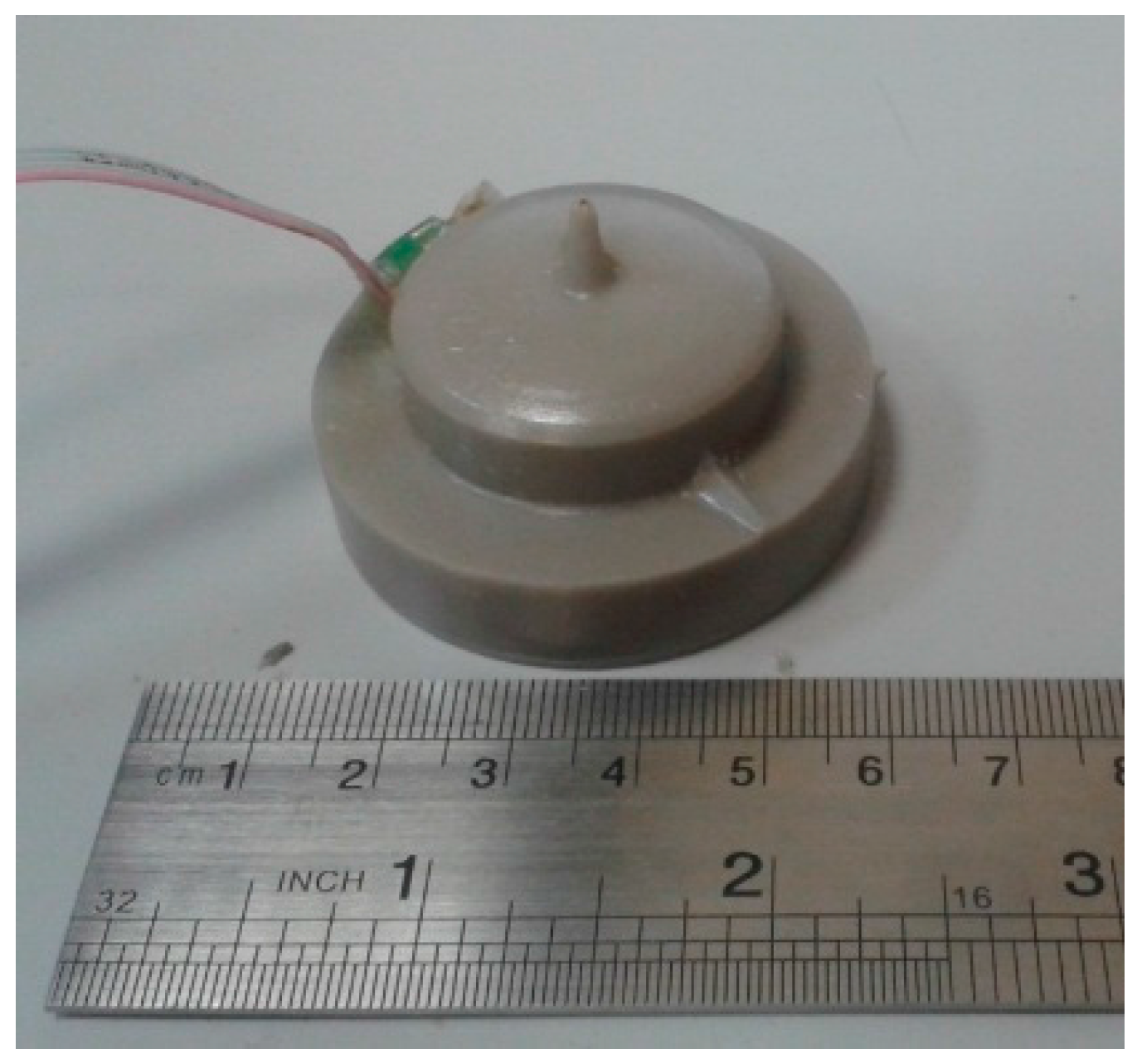
To verify the abovementioned sensor noise models in a wide frequency range (from 0.01 to hundreds of Hz), the following experiment was performed. The experimental study of the molecular electronic angular motion transducers self-noise was performed with the sample possessing the characteristics listed in
Table 1. The appearance of the studied sensor is presented in
Figure 3.
Table 1.
Structural characteristics of the studied angular motion sensors.
Table 1.
Structural characteristics of the studied angular motion sensors.
| Characteristic | Measuring Unit | MET |
|---|
| Overall dimensions | mm | Ø50 × 28 |
| Mass | grammes | less than 50 |
| Electrolyte solution components concentration | mol/L | 4 for LiJ; 0.1 for J2 |
| Hydrodynamic resistance | N·s/m5 | ~108 |
| Output signal | rad/s2 | In accordance with Figure 6 |
| Investigated frequency range | Hz | 0.01–200 |
Figure 3.
Appearance of a molecular electronic angular motion transducer.
Figure 3.
Appearance of a molecular electronic angular motion transducer.
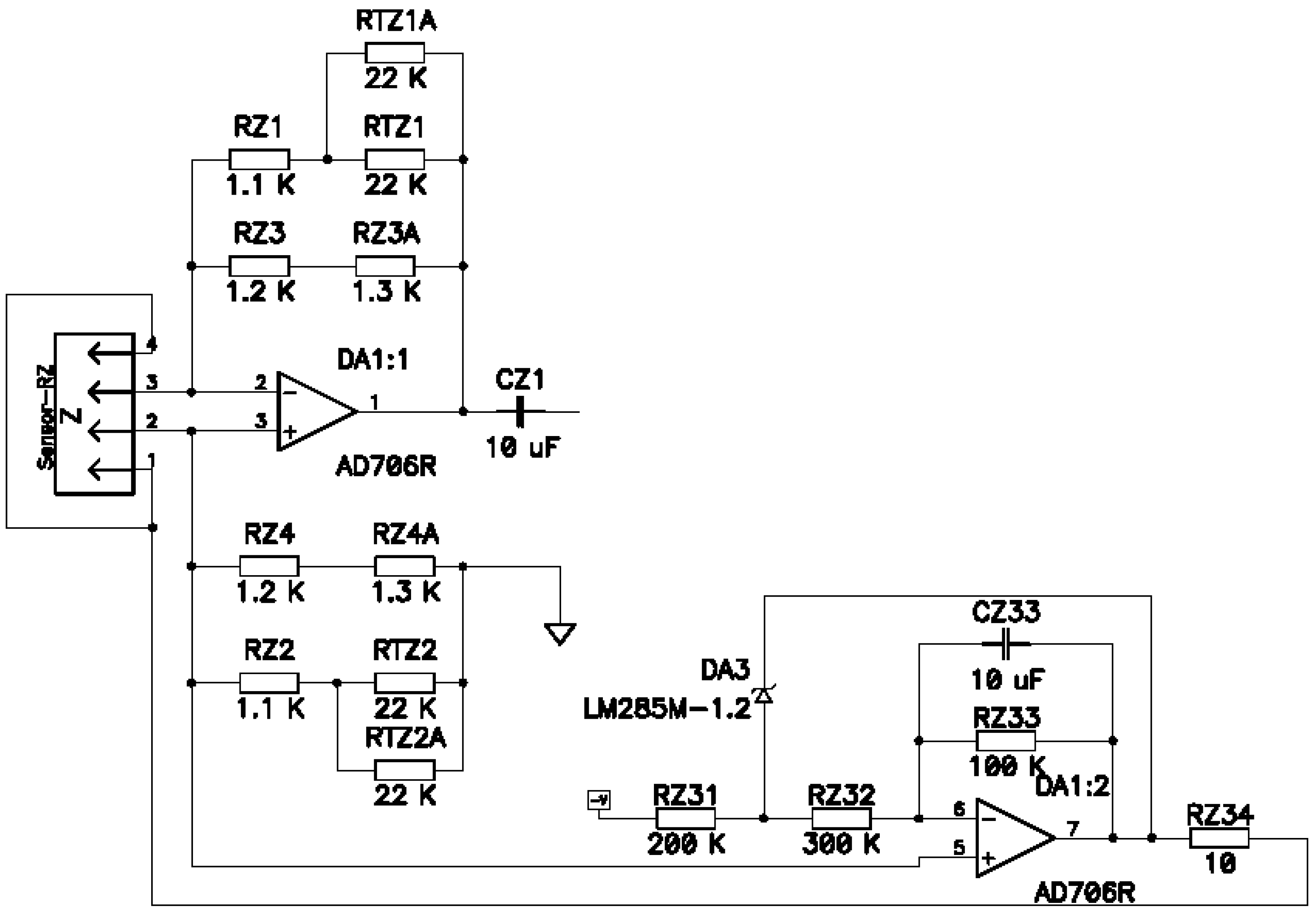
The electronic cascade used to convert sensor signal current into voltage consisted of frequency independent amplification on an AD 706 operational amplifier (Analog Devices, Norwood, MA, USA), see
Figure 4.
Figure 4.
Diagram for electronic conversion unit of signal current into electric voltage.
Figure 4.
Diagram for electronic conversion unit of signal current into electric voltage.
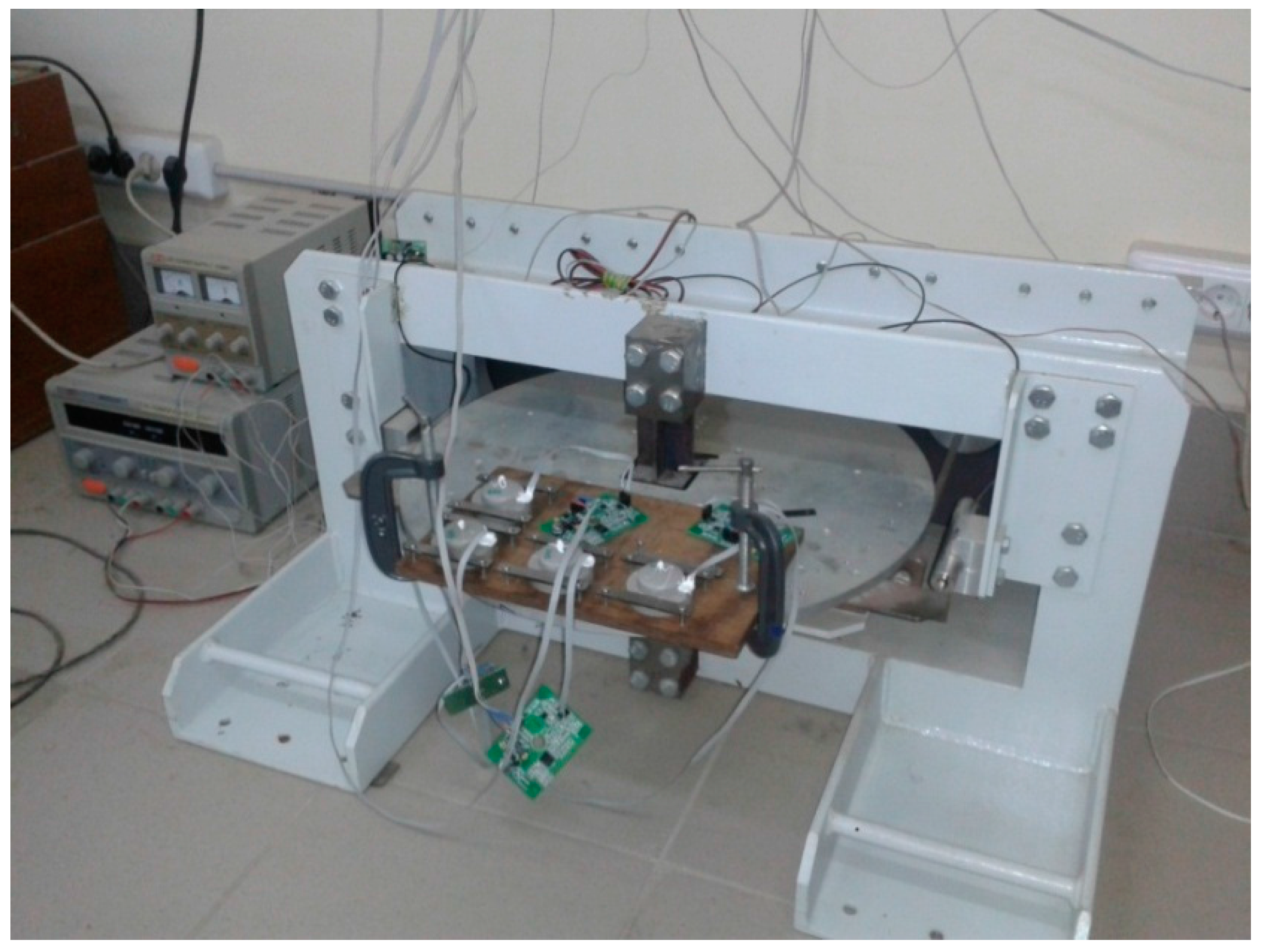
The direct measurement of amplitude-frequency curve was performed on a rotatory calibrating vibration platform in the frequency range of 0.01–200 Hz (
Figure 5). It was not possible to reach a wider frequency range, because of the substantial inclination impact at lower frequencies and because of the rapid fall in sensor sensitivity and lack of resolution of the vibration plate AD converter at higher frequencies.
Figure 5.
Rotatory calibration vibration platform.
Figure 5.
Rotatory calibration vibration platform.
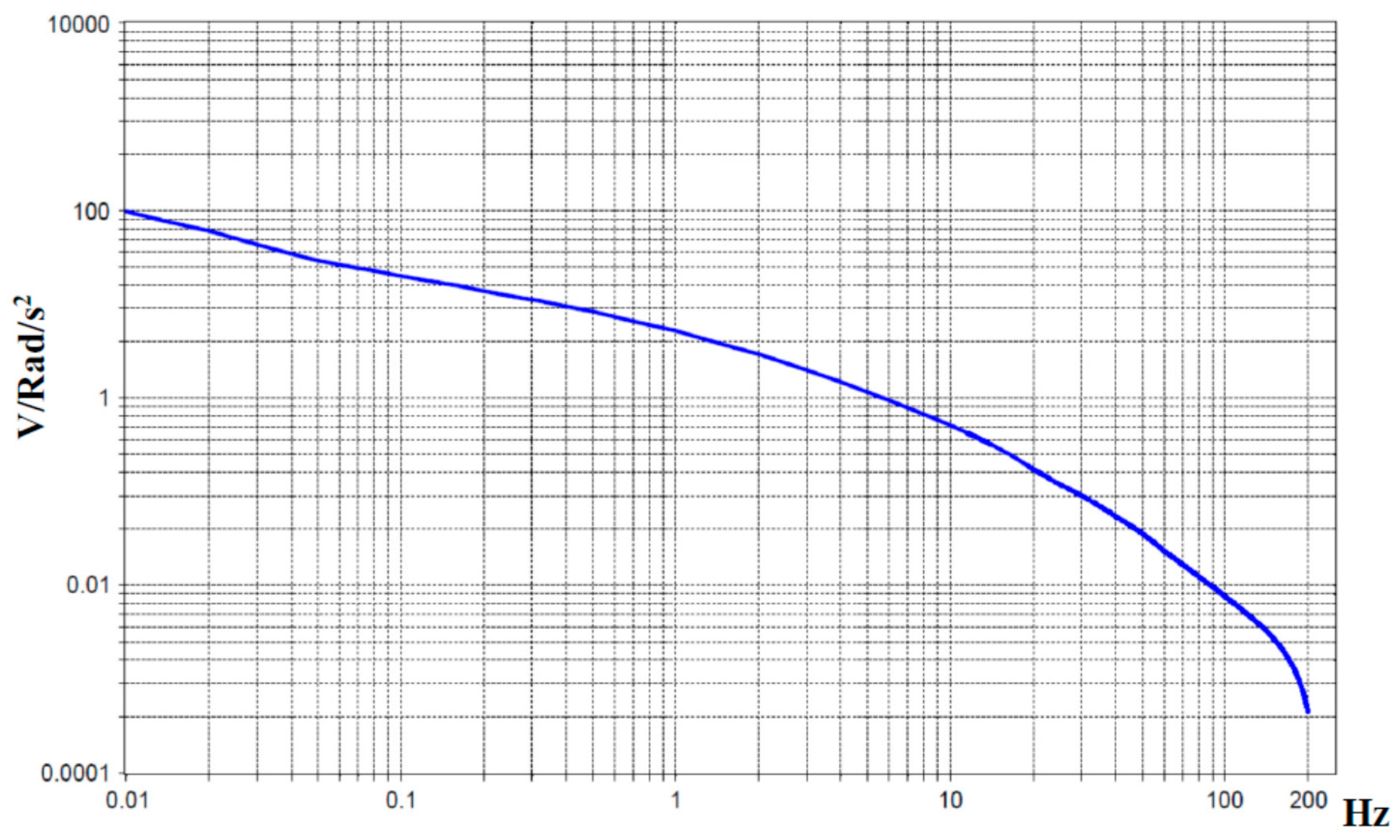
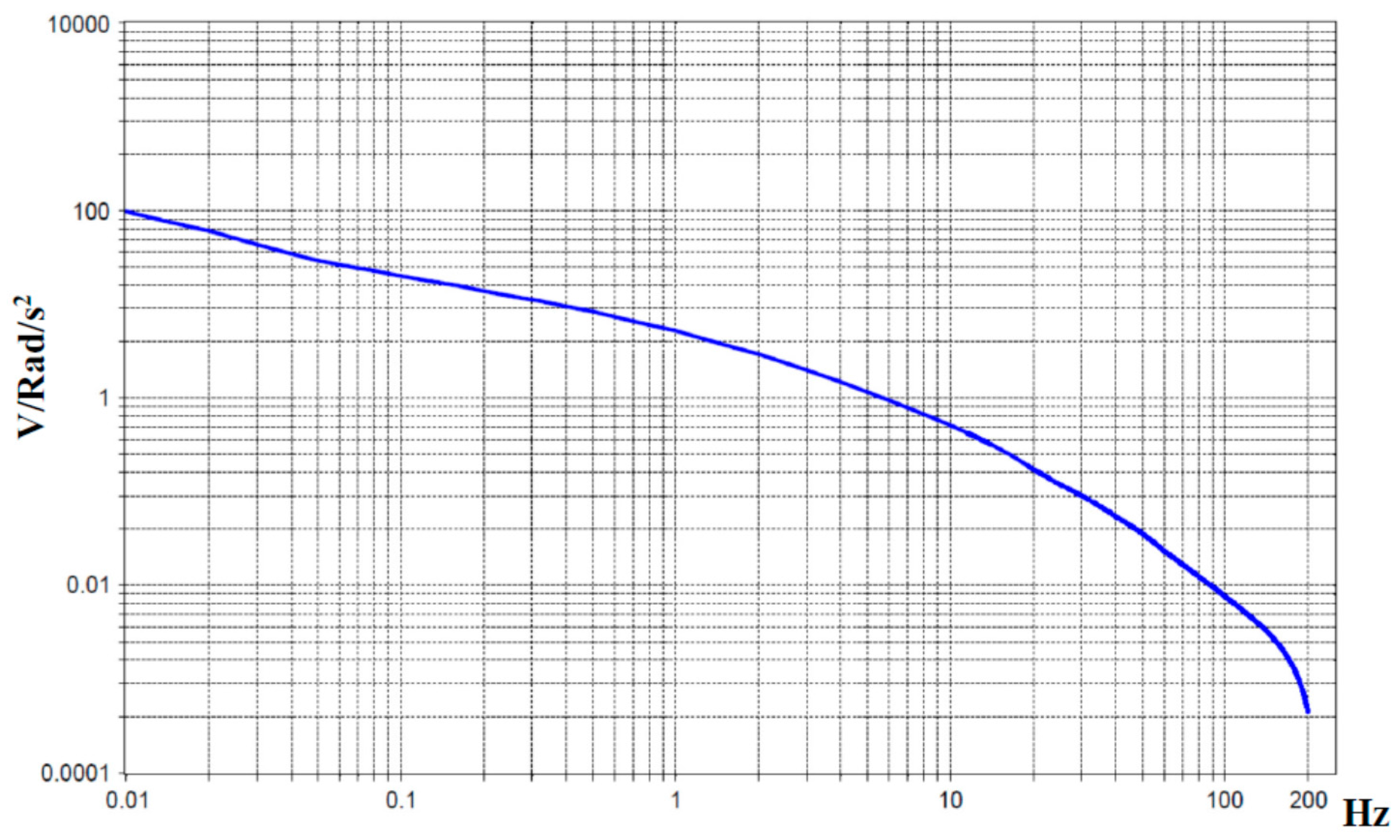
Figure 6 presents the measured amplitude-frequency curve of the angular sensor. It is worth noting that
Figure 6 shows the amplitude-frequency curve directly for a MET transducer, which is the main sensitive element of an angular motion sensor. A molecular electronic angular velocity sensor or angular acceleration sensor will have a flat transfer function (scale factor) in a predetermined frequency range (0.01–200 Hz) proportional to the angular velocity or angular acceleration, by means of analog frequency correction with the help of a corresponding electronic board. Normally, the electronic circuit comprises several cascades of amplification and filtering for the predetermined frequency band and some thermal compensation chains [
20].
Figure 6.
Experimental sensor conversion coefficient without frequency correction in units of angular acceleration. The Y-axis is the scale factor (V/Rad/s2), the X-axis is the frequency in Hz.
Figure 6.
Experimental sensor conversion coefficient without frequency correction in units of angular acceleration. The Y-axis is the scale factor (V/Rad/s2), the X-axis is the frequency in Hz.
Measurement of molecular electronic angular motion sensor self-noise was performed in a special basement area with a reduced amount of vibration noise. The sensor was mounted on a special concrete tabletop in a way that the sensitive axis was parallel to the gravity vector. In this orientation, the sensor detects only ground rotations relative to the vertical axis, which are typically smaller than rotations relative to horizontal axes. In turn, the reduced level of the seismic signals makes self-noise measurements more accurate. Note that according to the data presented in [
23], the self-noise in a MET cell depends on its orientation relative to the gravity vector as a result of liquid mass motion under the buoyancy force, initiated by local specific density fluctuations of the electrolyte. The effect is observable in the 0.01 to 0.1 Hz range only in encapsulated cells, while in a practical rotational sensor it is masked by the hydrodynamic fluctuations represented by Equation (3).
The electronic network connected to the sensor was supplying the sensor and performing the signal current conversion amplification stage in accordance with
Figure 3. To reduce the possible low-frequency background current temperature drift, the construction was covered with a foam cap. The “Out” sensor signal was sent to a 32-bit data collection system. The signal (self-noise) recording was performed simultaneously by two identical angular motion sensors, situated in close proximity to each other with a discretization frequency of 500 Hz. It should be noticed that the AD converter capacity was deliberately chosen as high, which allowed us to use only one amplification stage at high frequencies when studying sensor self-noise. In this case, the AD converter self-noise was at least one order less in comparison to the studied signal. The lack of artificial frequency compensation of high frequencies, as well as of additional noise source in the form of subsequent amplification stages substantially facilitated the study objectives of specifically defining the nature of angular motion sensor self-noise. The indicated experimental design allowed us to find the common signal component of two identical sensors on further signal processing and exclude it by calculating the correlatoring in accordance with the equations from [
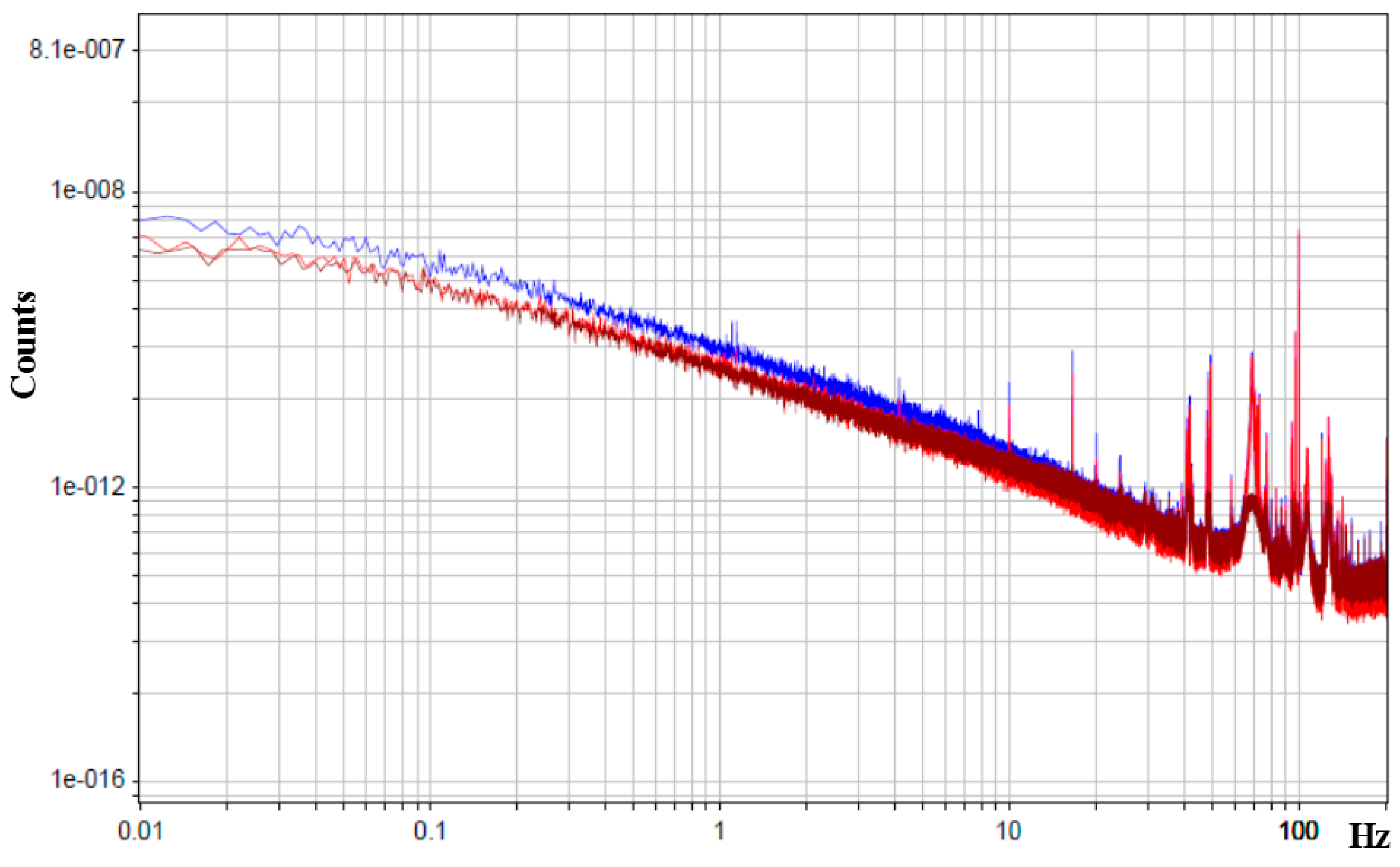
24]. A piece with the lowest background signal was chosen from the recorded signals (which was usually between 4 a.m. and 6 a.m.) and the power spectral density of each of the signals and of their uncorrelated part (which is, broadly defined, the molecular electronic angular motion sensor self-noise) was calculated with the Digital Signal Processing (DADiSP 6.5) software, see
Figure 7. The correlation calculation of the two identical devices allowed us to reduce the “signal” component in the sensor values significantly, leaving only the device self-noise.
Figure 7.
Power spectral density. The X-axis is the frequency in Hz, the Y-axis is the PSD counts. The blue and light red curves are the sensors PSD, the dark red curve is the PSD of uncorrelated part of the sensors signals.
Figure 7.
Power spectral density. The X-axis is the frequency in Hz, the Y-axis is the PSD counts. The blue and light red curves are the sensors PSD, the dark red curve is the PSD of uncorrelated part of the sensors signals.
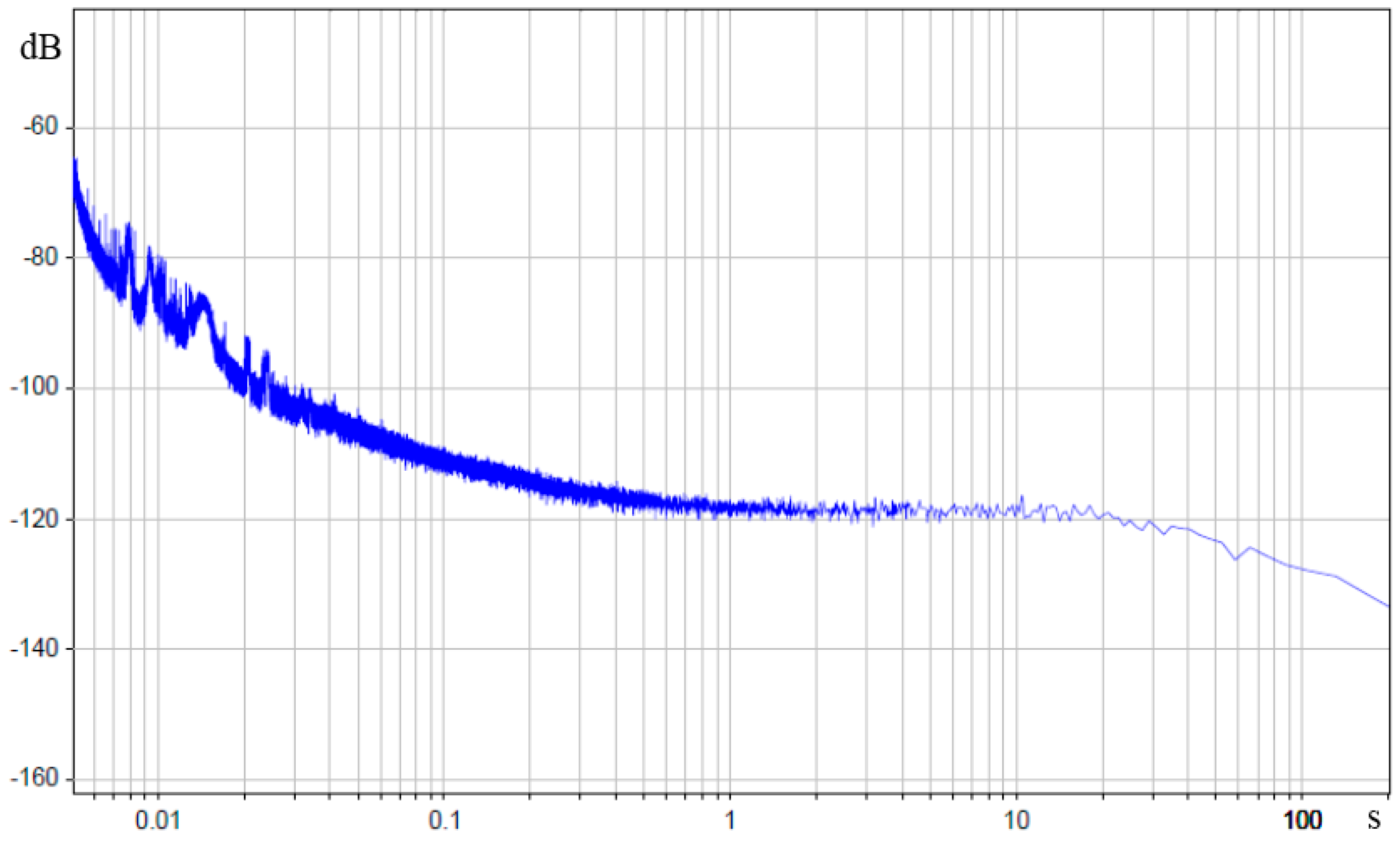
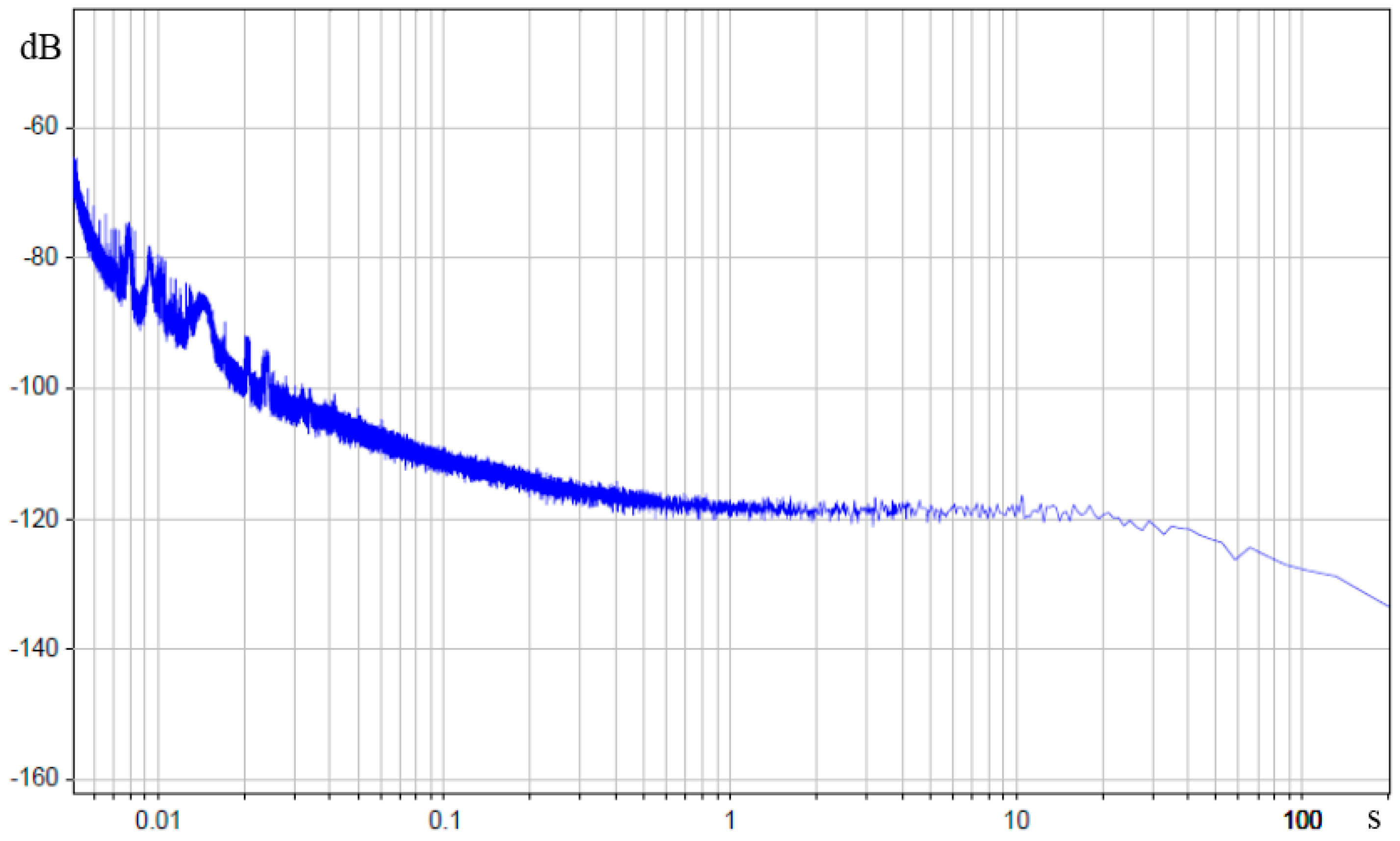
Lets’ change angular motion sensor self-noise into units of input angular acceleration. To do so, we divide obtained values of sensor noise power spectral density by sensor transfer function experimental value. The result is presented in decibels relating to level in 1 rad/s
2/√Hz in
Figure 8, (0 dB = 1
).
Now lets’ compare the above-described theoretical models with the obtained experimental data for the specified frequency range (0.01–200 Hz, which corresponds with the periods of 0.005–100 s).
In accordance with the requirements of Equation (3), the results of the experimental noise measurements of
Figure 8 were transformed into units of input angular acceleration.
It can be seen that the resulting power spectral density has practically no frequency dependence in the range of 0.025–2 Hz (0.5–40 s) and is flat in units of applied acceleration, which totally agrees with the Equations (2) and (3).
Figure 8.
Power spectral density of molecular electronic sensor in units of input angular acceleration in decibels relating to 1 rad/s2/, The X-axis is the period in seconds.
Figure 8.
Power spectral density of molecular electronic sensor in units of input angular acceleration in decibels relating to 1 rad/s2/, The X-axis is the period in seconds.
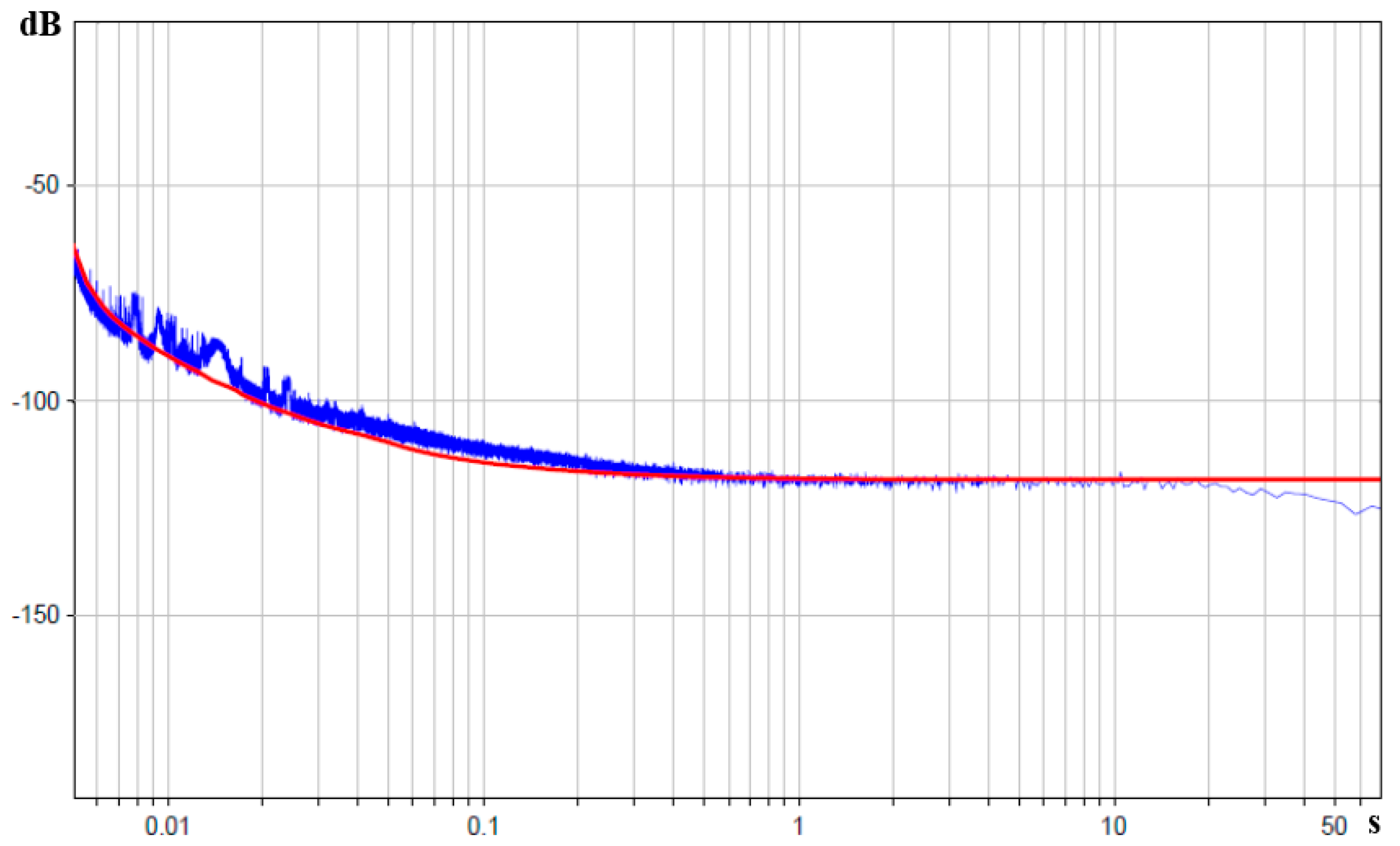
Therefore, we can draw a conclusion that to describe angular motion sensor self-noise in the low frequencies range (0.025–2 Hz) in units of applied angular acceleration it is enough to take account of hydrodynamic thermal noise, which agrees with the following simplification of the Equation (3):
The observed decline in noise pattern in the lower frequency range can be described by low quality measurement of the sensor transmission characteristic on a vibration plate, as microscopic inclinations of the vibration plate contribute to the measurement errors at the lowest frequencies, which, in its turn, leads to the increased values of characteristic transmission.
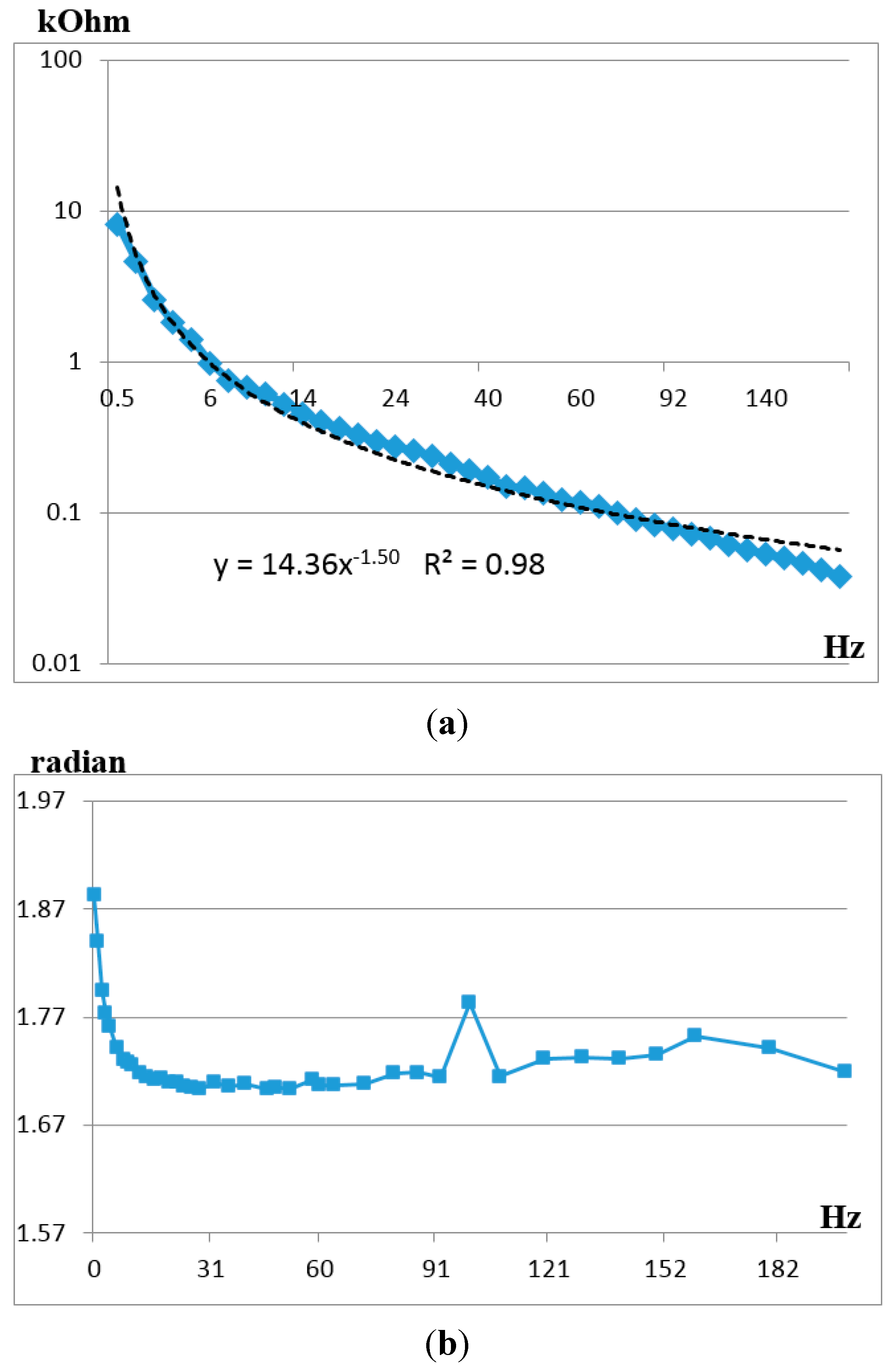
According to the method of direct measurement of molecular electronic angular motion sensor electrical impedance, which was described above for the range of medium and high frequencies, the experimental observation of range and phase of the electrical impedance was performed. The results are presented in
Figure 9a, which shows the impedance module and the corresponding approximation line, and in
Figure 9b, which shows the impedance phase. It is important to note that the impedance module in the studied frequency range approaches the curve ~1/
3/2 most accurately, whereas the phase shift is close to π/2. The sensor impedance is defined by the classical capacity of the double electrical layer at electrode-electrolyte interface, which has been studied in a large number of both fundamental theoretical and experimental works [
25,
26,
27,
28,
29].
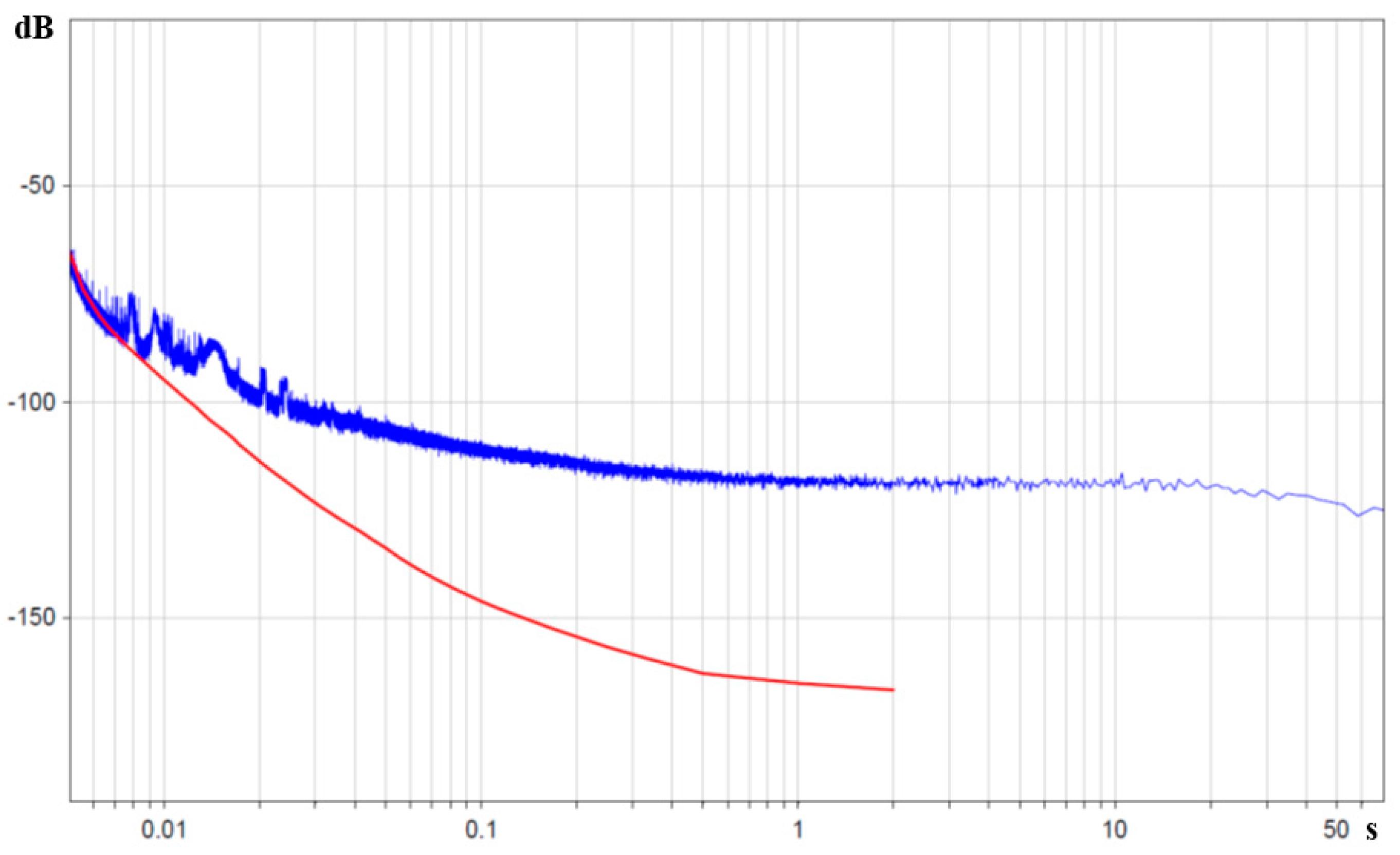
The modelling of the contribution to sensor self-noise of the operational amplifier of conversion stage of signal current into voltage with molecular electronic sensor with complex impedance value in input from
Figure 9 was performed in accordance with Equation (4).
Data from the AD706 microchip manufacturer [
30] give a value of
with the ascent up to
to lower frequencies (0.5 Hz). By further setting the measured values of
,
= 462 Oh and by expressing the received dependence in decibels relative to 1 rad/s
2/
, we get the red curve in
Figure 10.
Figure 9.
(a) Experimental impedance module of molecular electronic angular motion sensor in kilohms; (b) Experimental impedance phase of molecular electronic angular motion sensor in radians. The X-axis is the frequency in Hz.
Figure 9.
(a) Experimental impedance module of molecular electronic angular motion sensor in kilohms; (b) Experimental impedance phase of molecular electronic angular motion sensor in radians. The X-axis is the frequency in Hz.
The obtained experimental data substantially improve the accuracy of the assumptions in [
20] by using the real values of angular motion transducer impedance, as well as considering impedance frequency dependence. In accordance with
Figure 10 the electronic noise starts prevailing over converter noises of other kinds only at frequencies higher than 90–100 Hz.
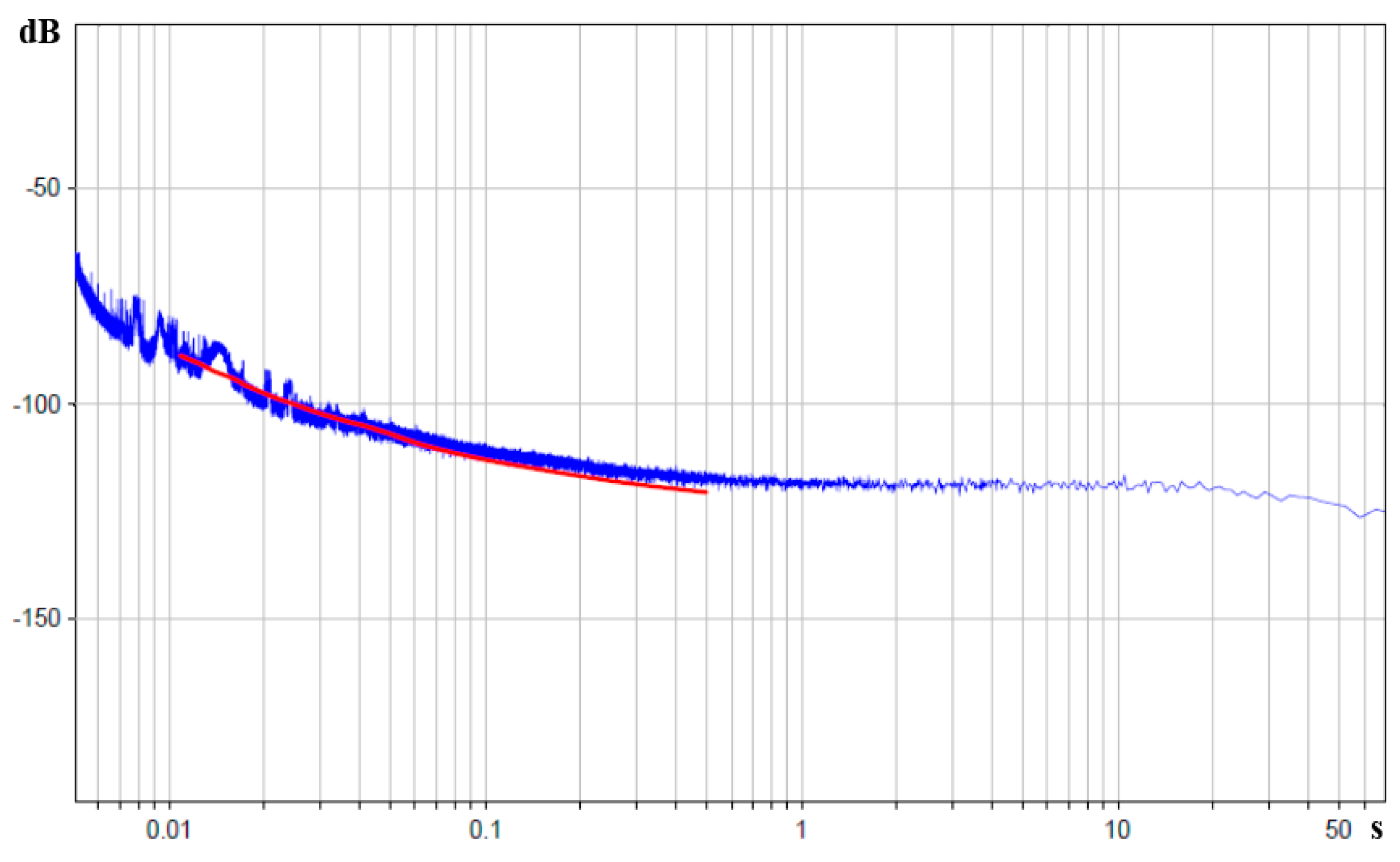
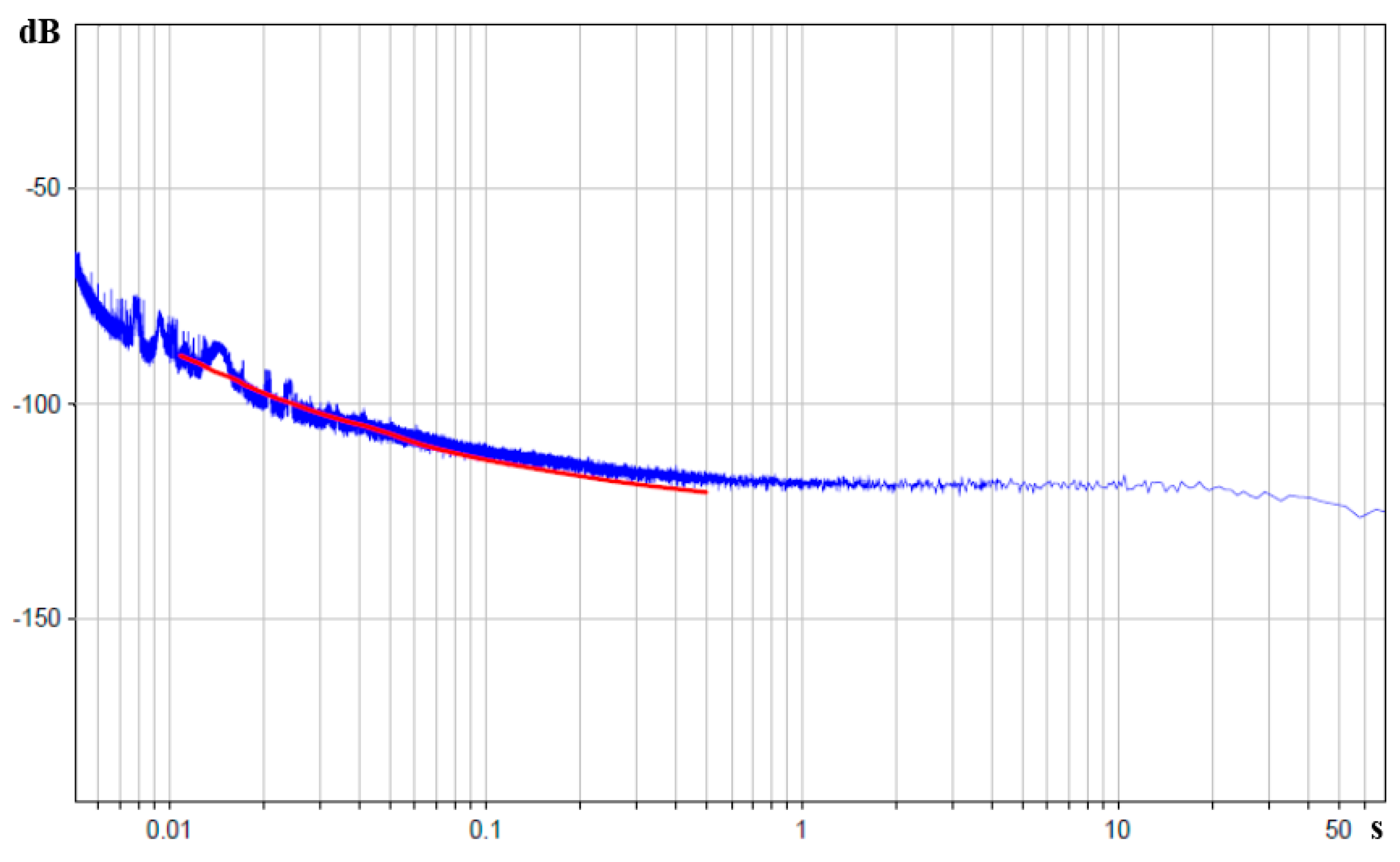
In accordance with the above-described convective noise model, for the medium frequency range of 2–100 Hz, the noise with power spectral density inversely proportional to frequency must be observed, according to Equation (5). Modelling of the frequency dependence by experimental points in the stated range gives the following equation:
Figure 10.
Power spectral density of molecular electronic sensor noise in units of input angular acceleration in decibels relative to 1 rad/s2/ is the blue curve, whereas noise of operational amplifier AD706 with input sensor impedance is the red curve. The X-axis is the periods in seconds.
Figure 10.
Power spectral density of molecular electronic sensor noise in units of input angular acceleration in decibels relative to 1 rad/s2/ is the blue curve, whereas noise of operational amplifier AD706 with input sensor impedance is the red curve. The X-axis is the periods in seconds.
In the units of applied angular acceleration for power spectral density:
Herein is the angular motion sensor conversion coefficient (V/rad/s2).
Root-mean-square deviation of the experimental data from the fitted dependence Equation (8) is not higher than 17% in the range of 2–100 Hz.
Figure 11 shows the comparison of the experimental part of noise curve with the fitted dependence Equation (8) in decibels relating to 1 rad/s
2/
.
Figure 11.
Power spectral density of molecular electronic sensor noise in units of input angular acceleration in decibels relative to 1 rad/s2/ is the blue curve, theoretical curve corresponding to dependence Equation (7) is the red curve. The X-axis is the periods in seconds.
Figure 11.
Power spectral density of molecular electronic sensor noise in units of input angular acceleration in decibels relative to 1 rad/s2/ is the blue curve, theoretical curve corresponding to dependence Equation (7) is the red curve. The X-axis is the periods in seconds.
The resulting agreement of the experimental data with the results of previous works [
13,
23] implies that in the frequency range of 2–100 Hz, molecular electronic angular motion sensor self-noise has a convective nature and corresponds to the earlier described noise in encapsulated molecular electronic transducers, where the possibility of integral liquid flow through the transductive element is excluded.
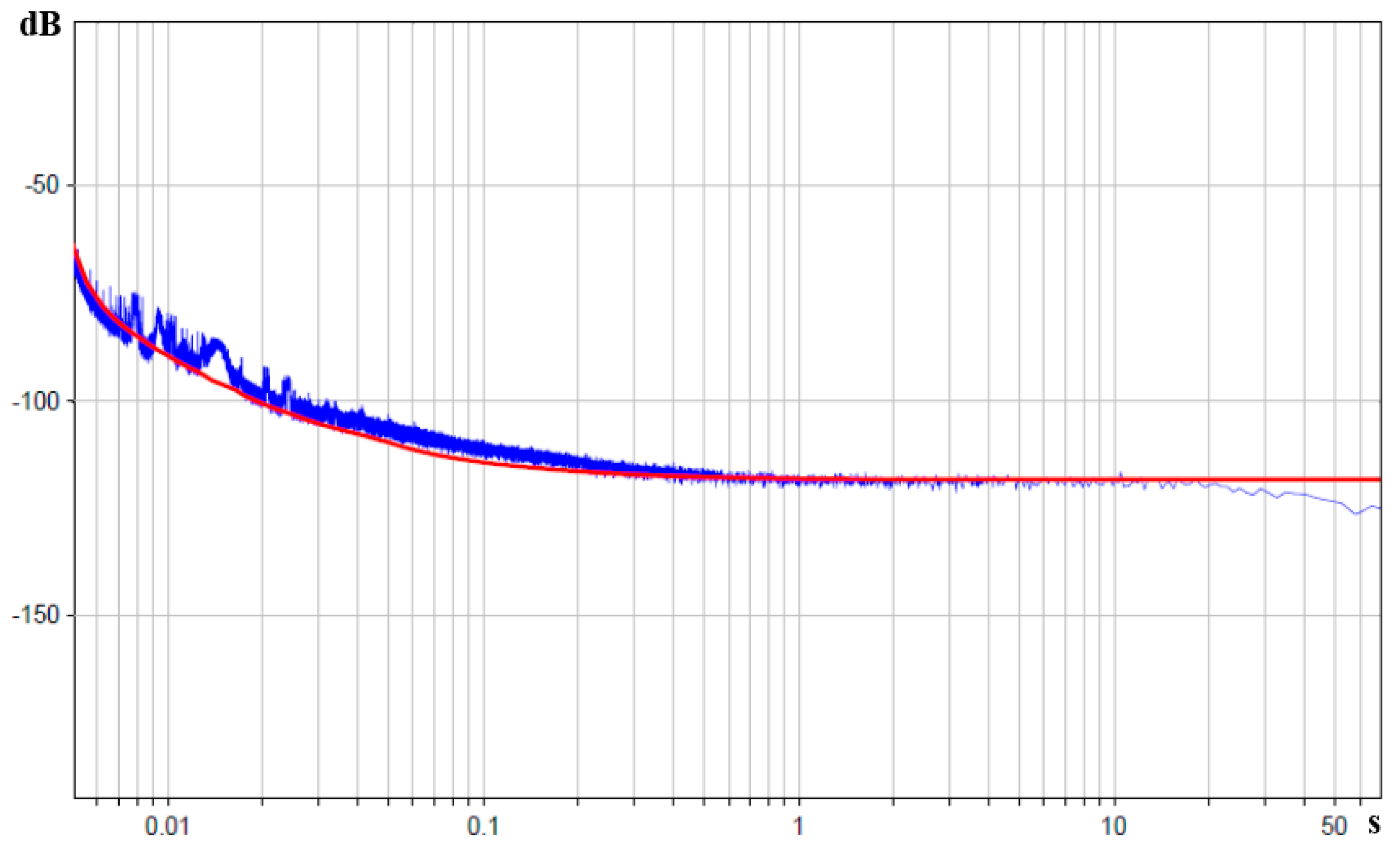
After root-mean-square addition of the observed noise mechanisms, we get the general Equation (9):
On performing such addition of the theoretical noise models of different kinds and comparing them to the experimental data, we get
Figure 12.
Figure 12.
Power spectral density of molecular electronic sensor noise in units of input angular acceleration in decibels relative to 1 rad/s2/ is the blue curve, theoretical curve corresponding to root-mean-square sum of three noise mechanisms is the red curve. The X-axis is the periods in seconds.
Figure 12.
Power spectral density of molecular electronic sensor noise in units of input angular acceleration in decibels relative to 1 rad/s2/ is the blue curve, theoretical curve corresponding to root-mean-square sum of three noise mechanisms is the red curve. The X-axis is the periods in seconds.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}