
First Results of Field Absolute Calibration of the GPS Receiver Antenna at Wuhan University



Abstract
:1. Introduction

2. The Absolute Antenna Phase Calibration Platform at Wuhan University

3. Algorithm and Strategies of Data Processing
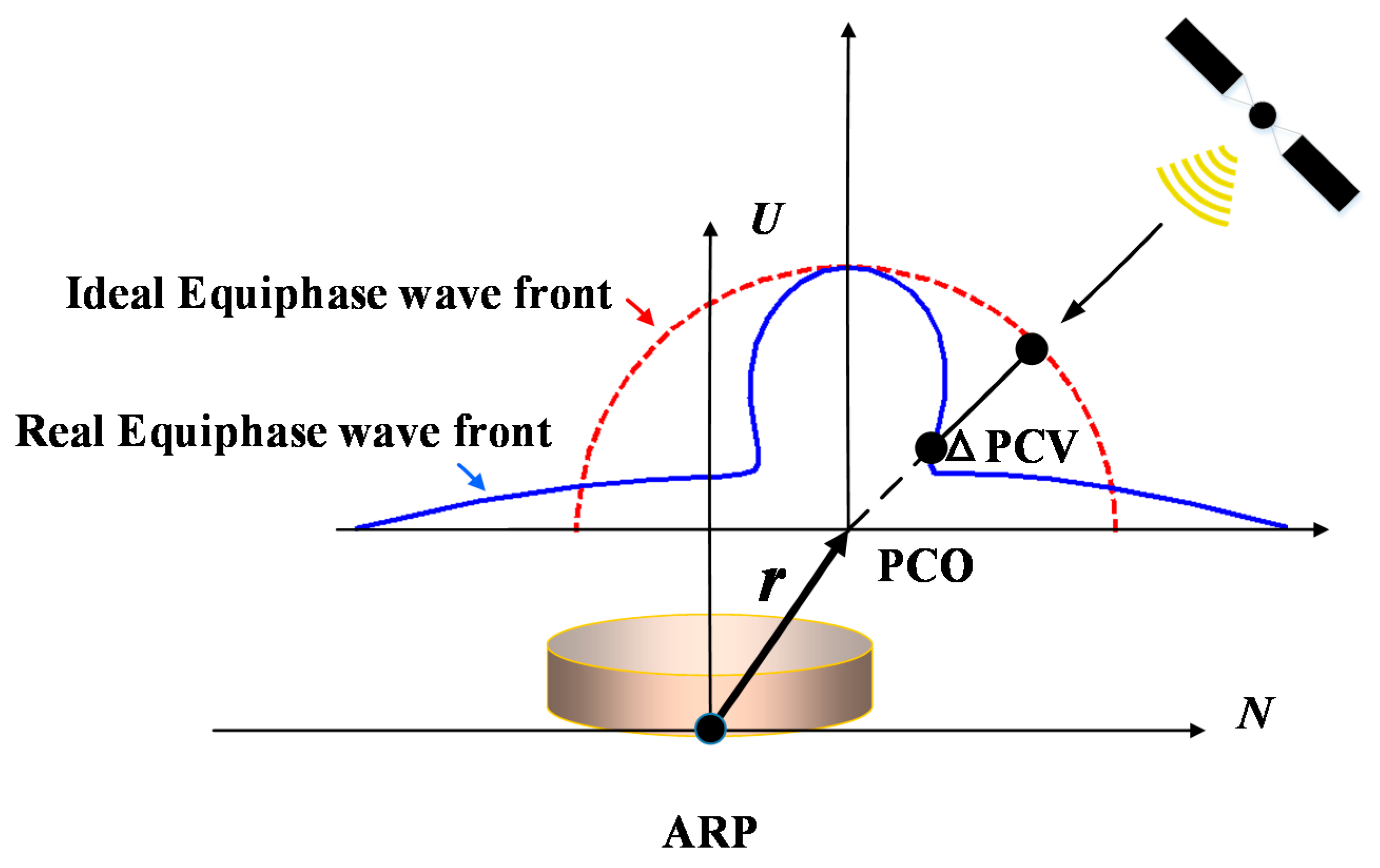
3.1. Antenna Phase Model Review
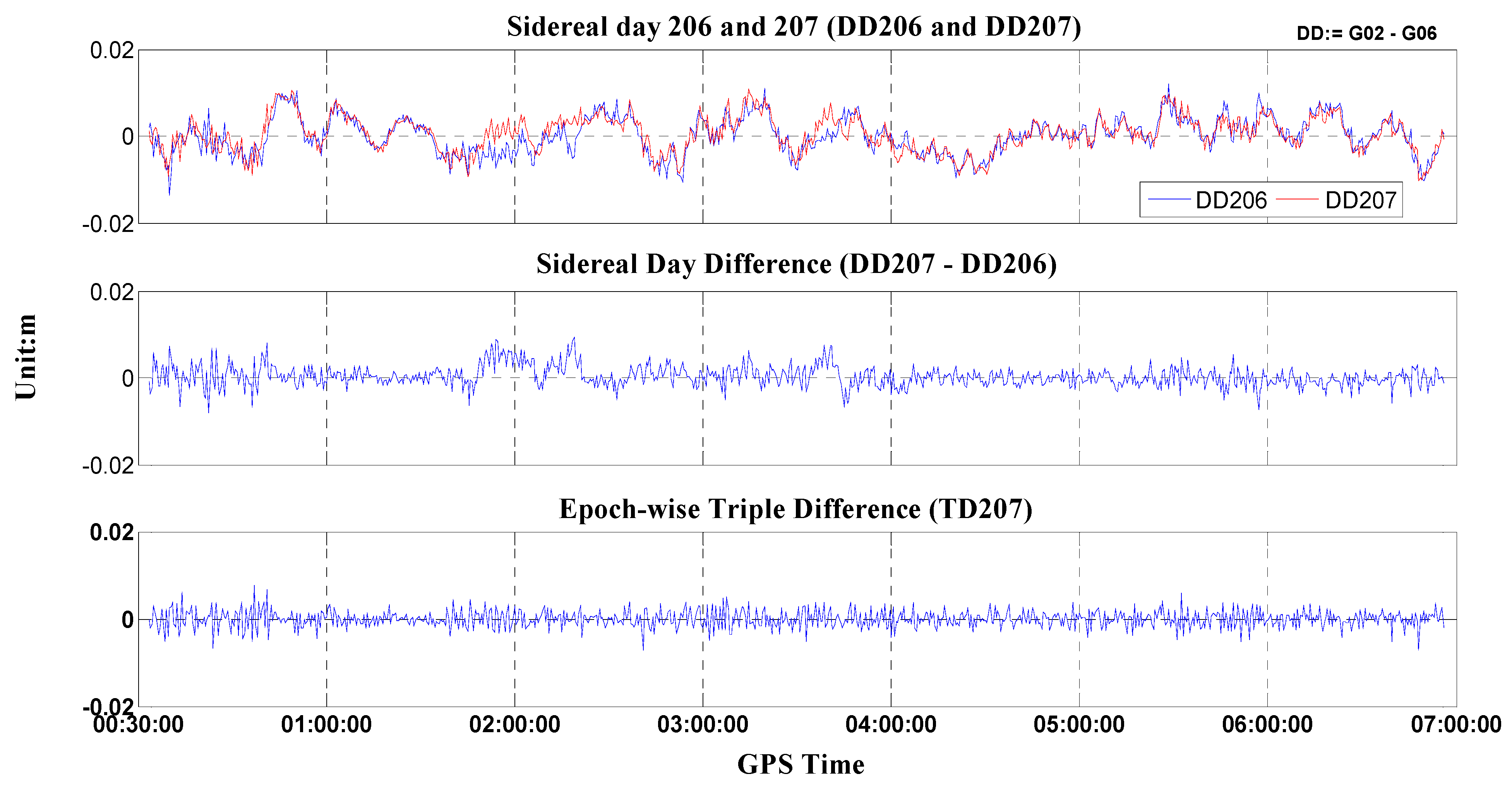
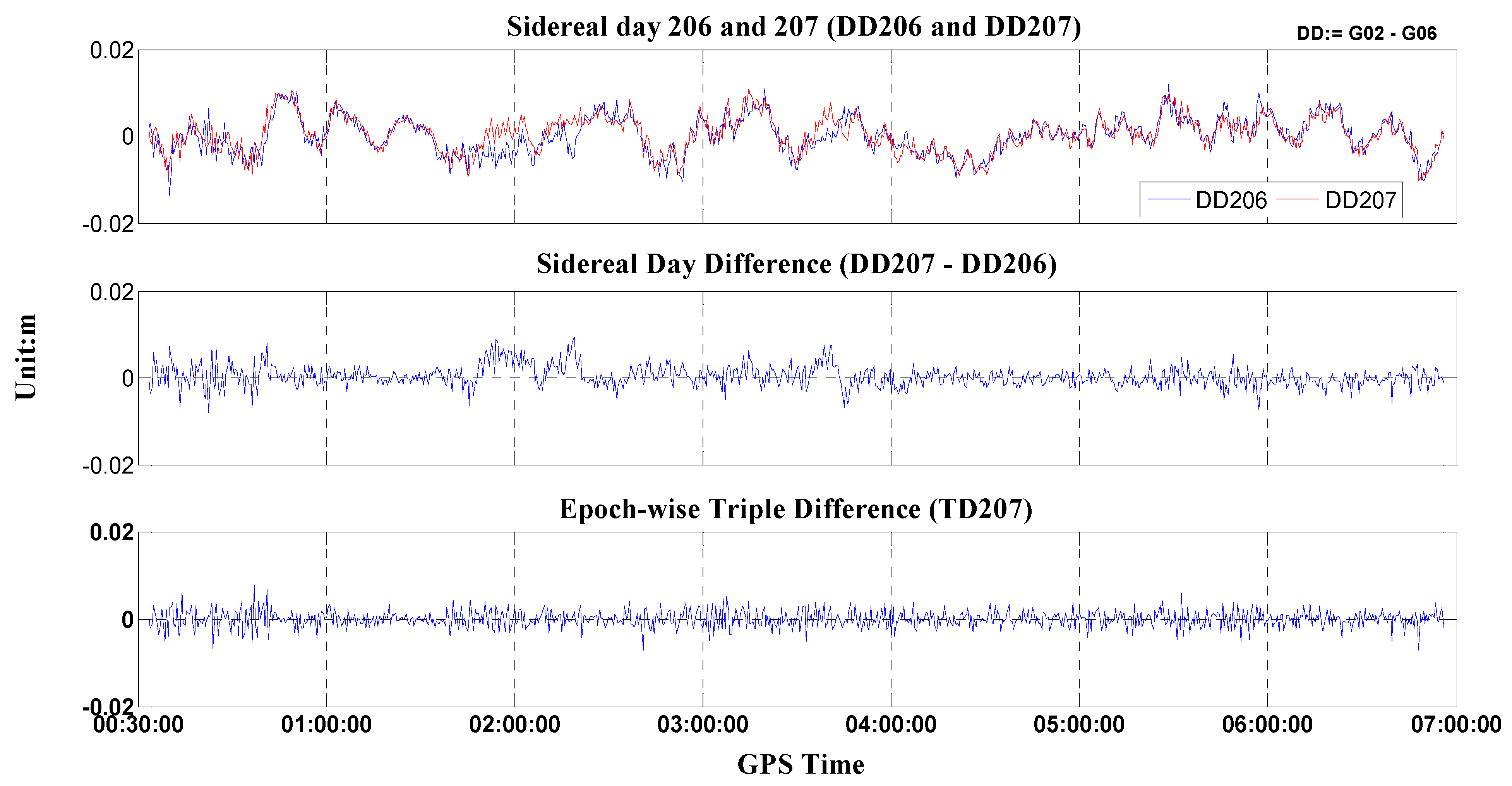
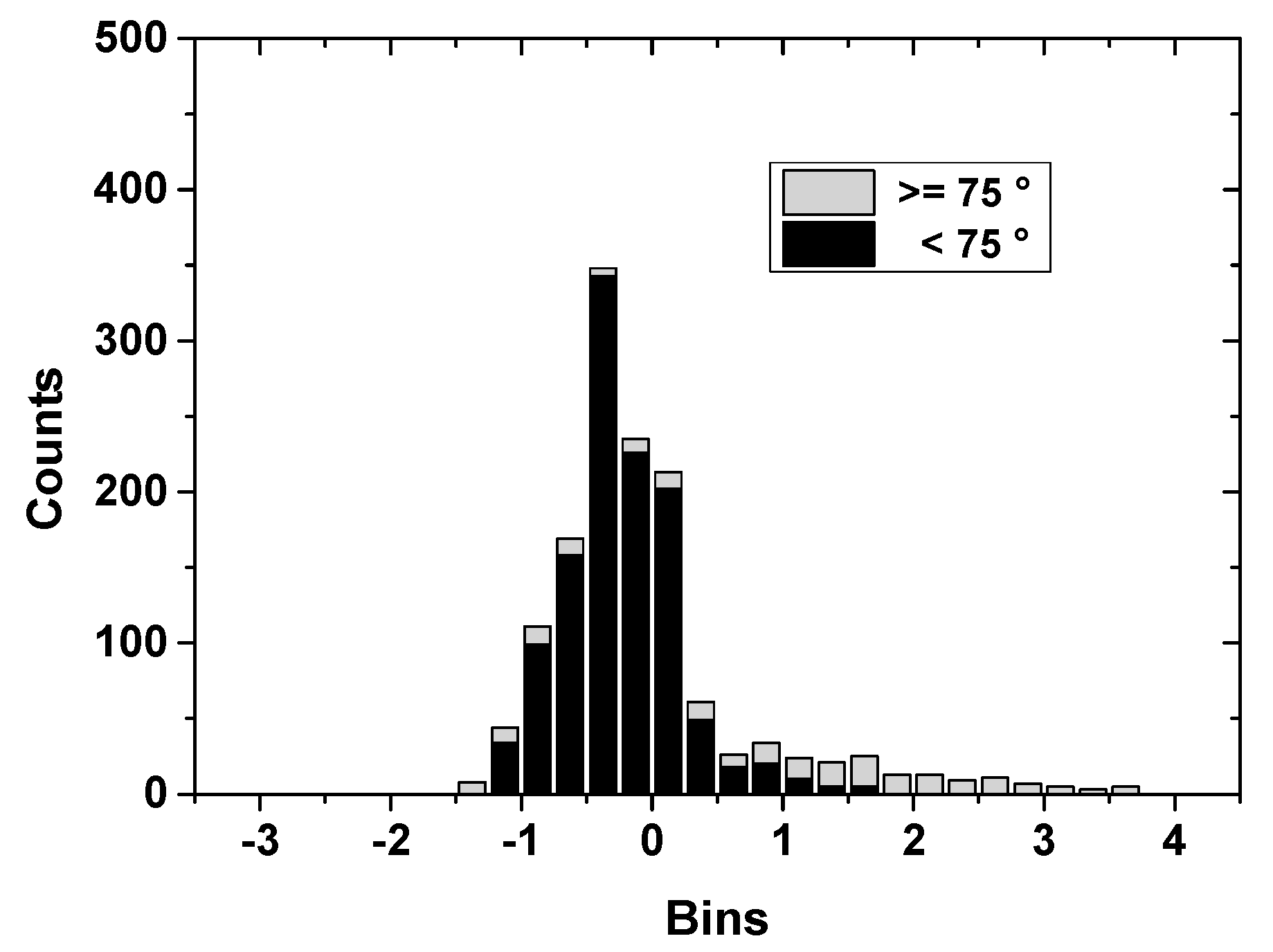
3.2. Multipath Analysis
3.3. Absolute PCO and PCV Separated from Relative Observation
4. Data Collection and Result Discussion
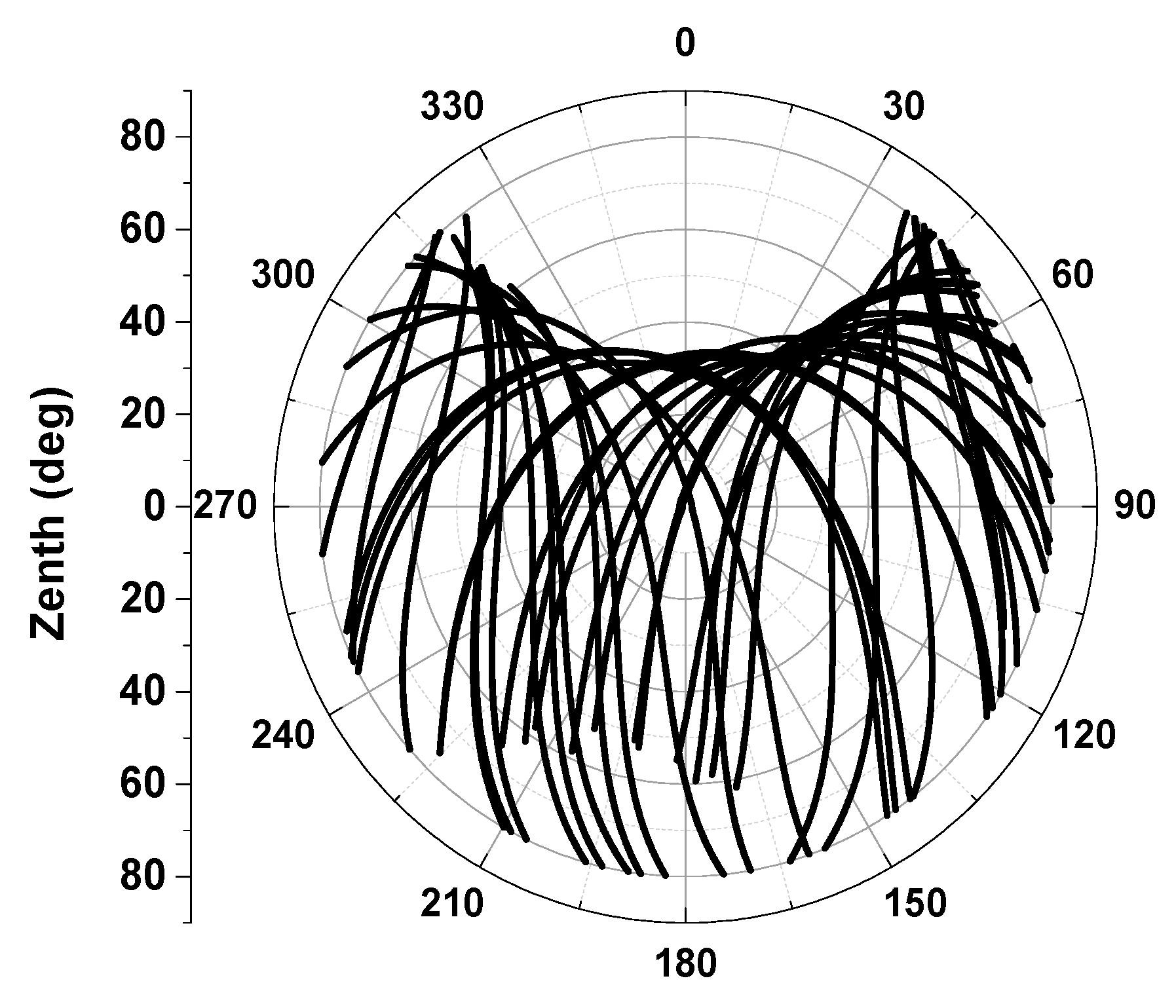
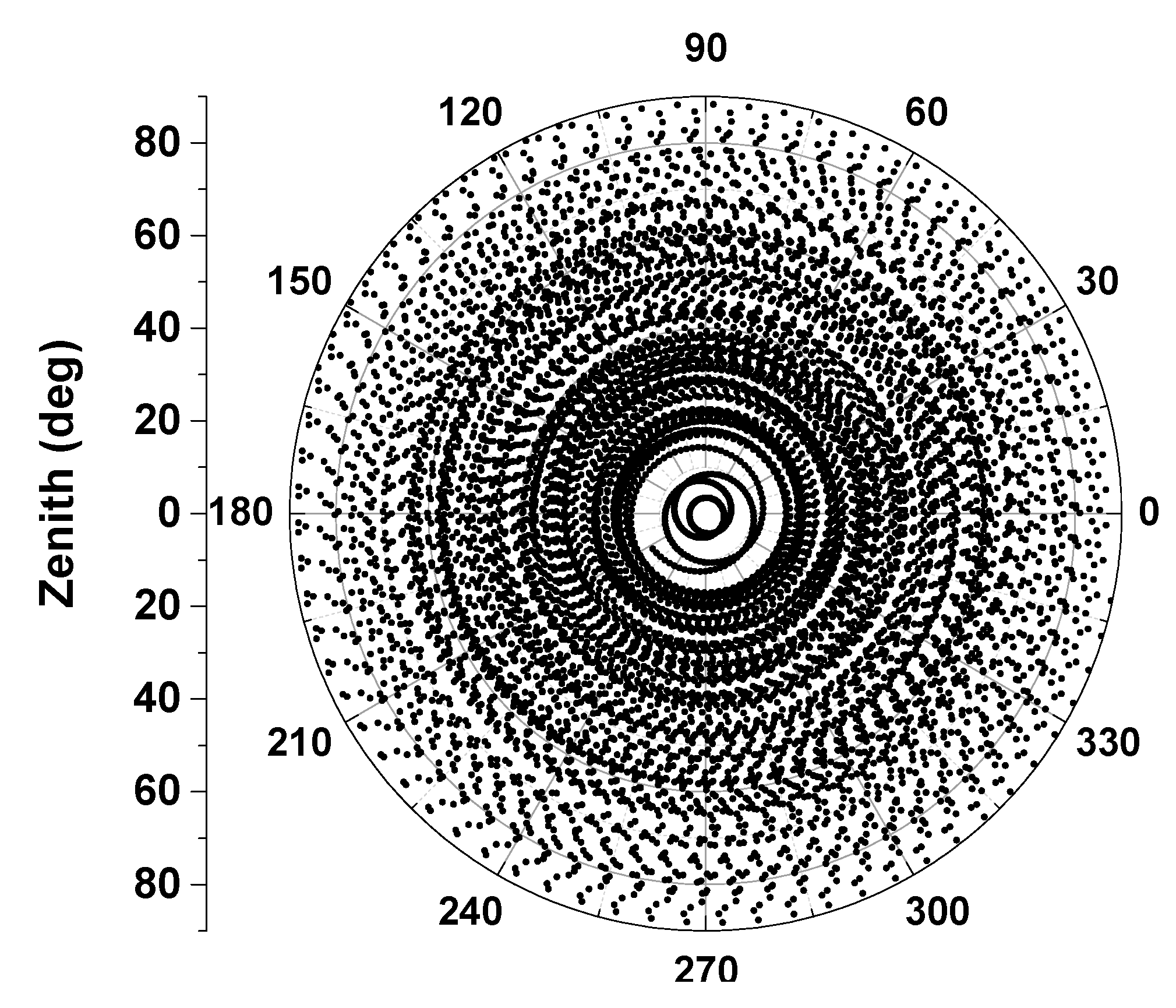
4.1. Experiment Data Collection

4.2. Repeatability Accuracy Validation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Day of Year 2014 | Antenna Type | North (mm) | East (mm) | Up (mm) | Standard Deviation (mm) |
|---|---|---|---|---|---|
| 026 | TRM57971.00/NONE | 0.92 | −0.10 | 66.92 | σN = 0.17, σE = 0.12, σU = 0.30 |
| 064 | 0.97 | −0.25 | 67.01 | ||
| 112 | 1.33 | −0.38 | 66.68 | ||
| 240 | 1.24 | −0.35 | 66.99 | ||
| 297 | 1.09 | −0.34 | 67.50 | ||
| 026 | TRM59800.00/NONE | 0.55 | 1.14 | 90.02 | σN = 0.04, σE = 0.25, σU = 0.26 |
| 241 | 0.61 | 1.49 | 89.66 | ||
| 065 | LEIAR25/NONE | 1.33 | 0.78 | 155.77 | σN = 0.03, σE = 0.10, σU = 0.17 |
| 113 | 1.28 | 0.92 | 155.53 |


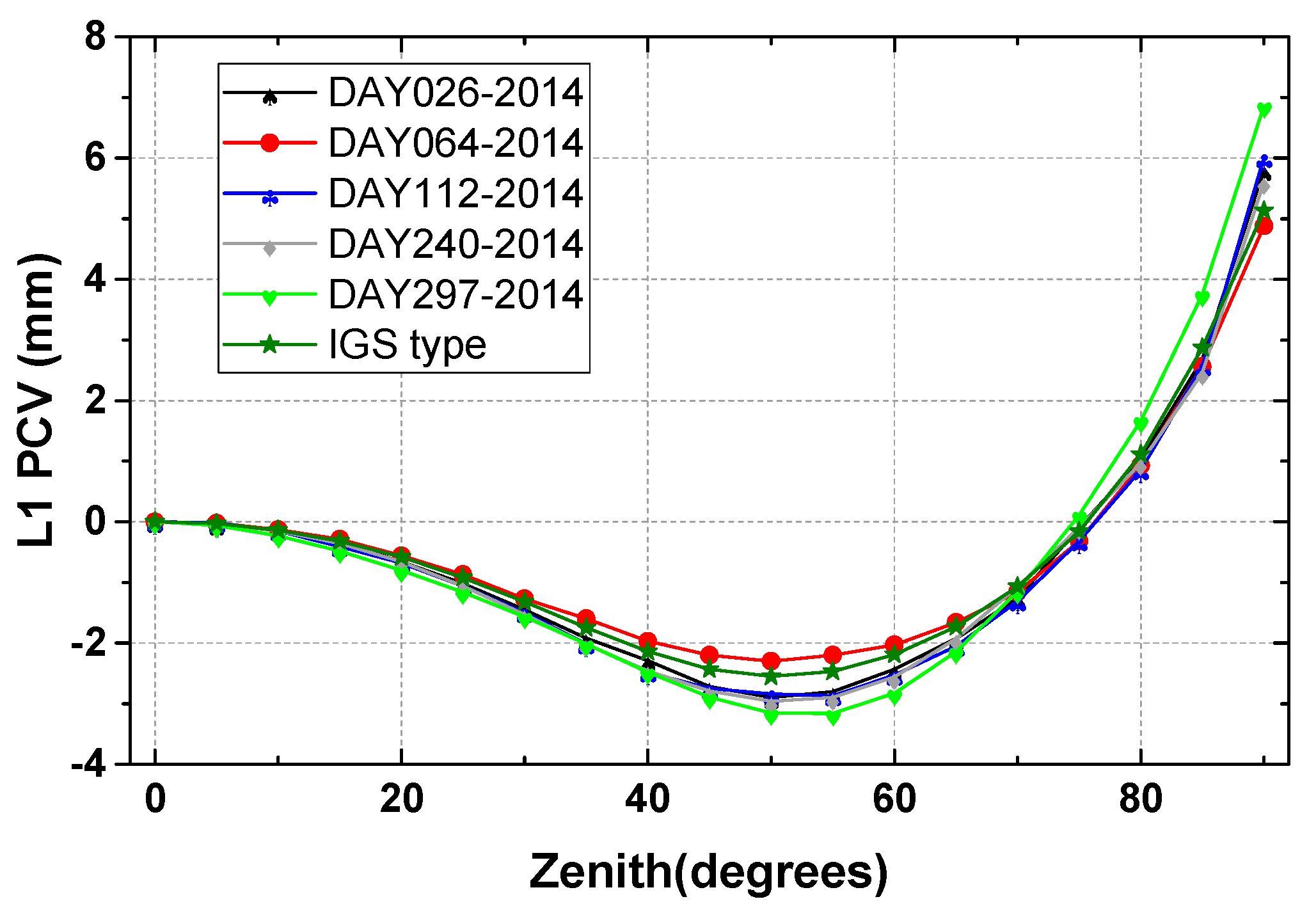
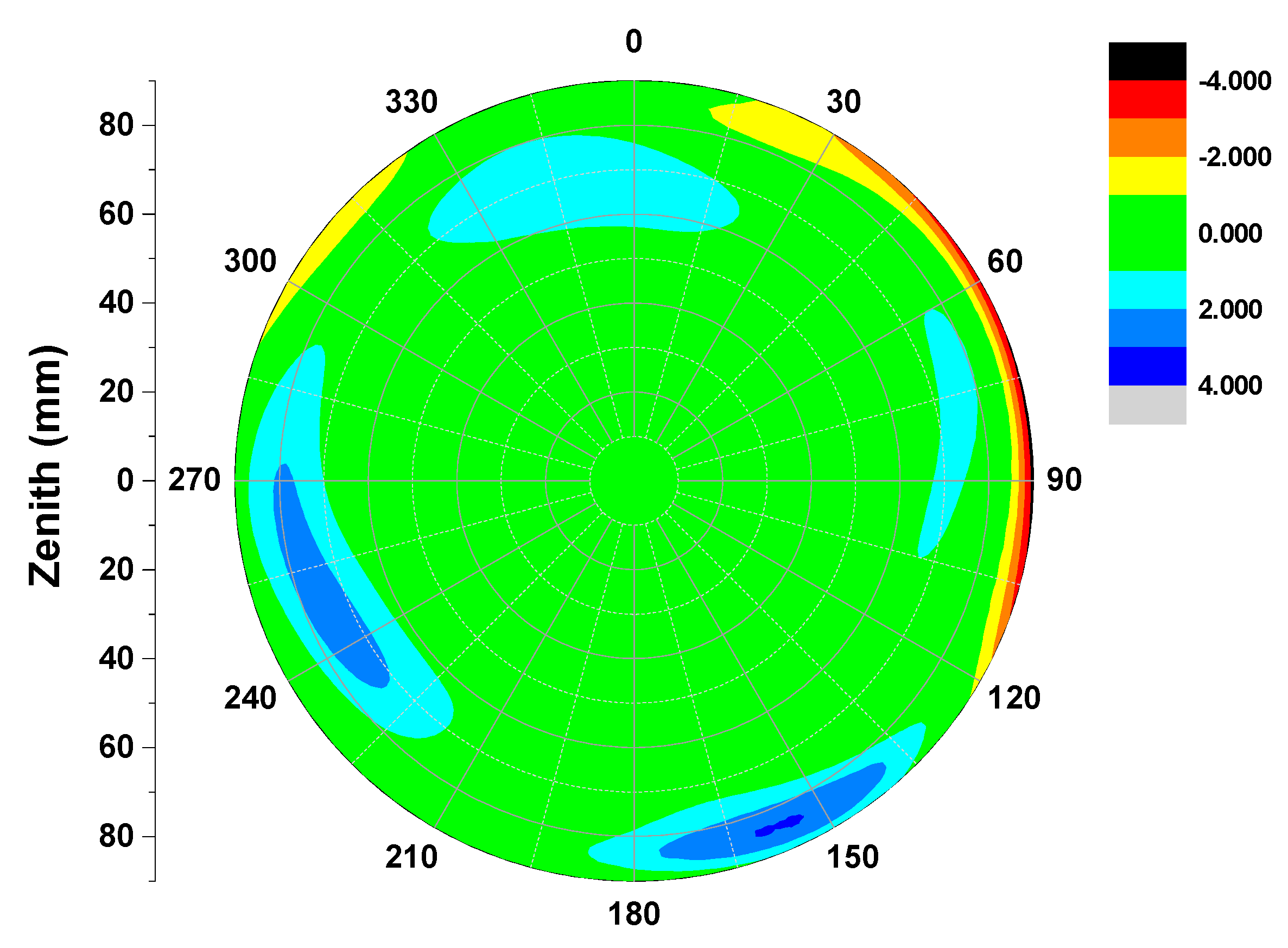
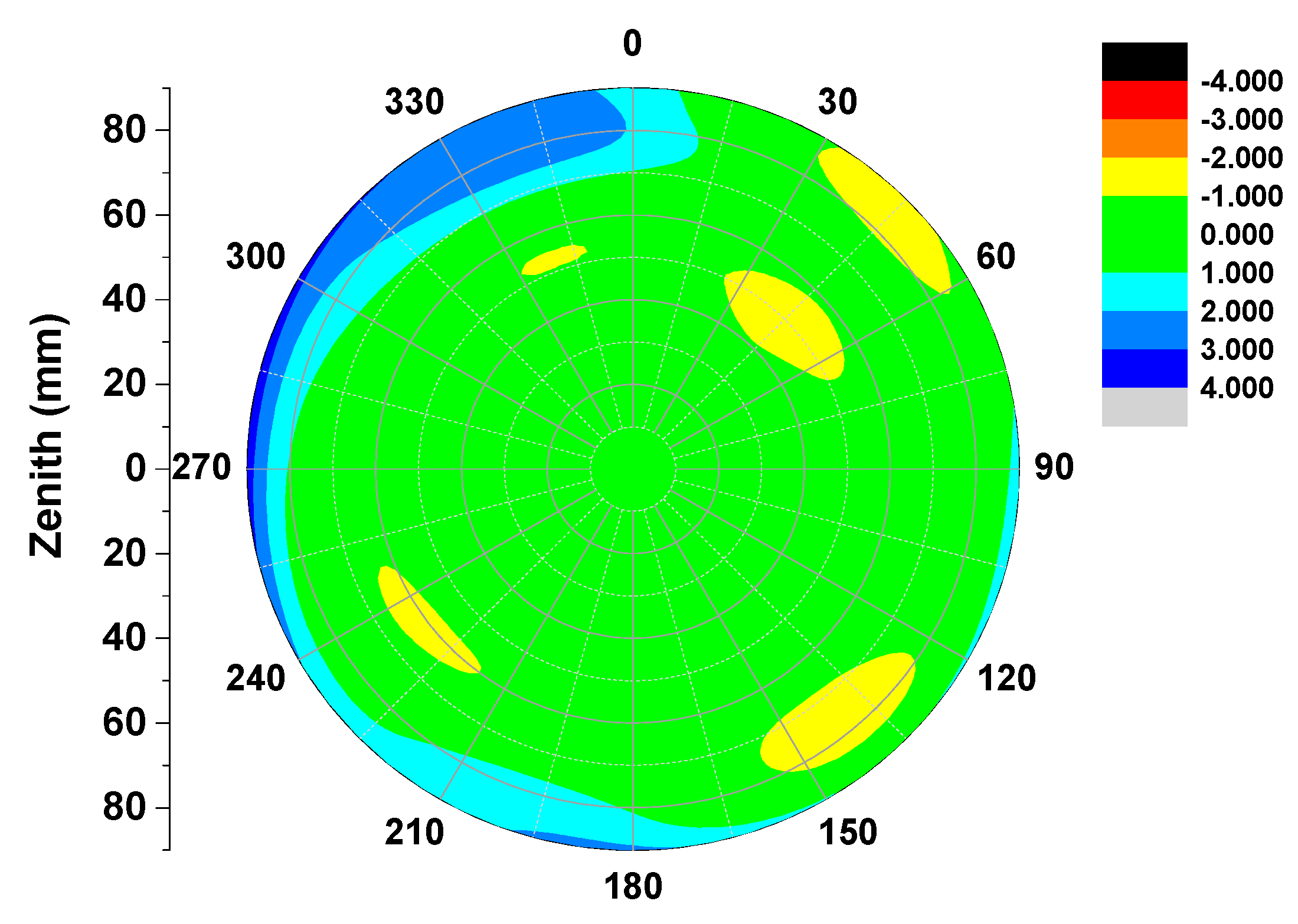
4.3. Comparison with IGS Type Values
| Antenna Type | σN (mm) | σE (mm) | σU (mm) |
|---|---|---|---|
| TRM57971.00/NONE | 0.16 | 0.1 | 0.23 |
| TRM59800.00/NONE | 0.03 | 0.17 | 0.18 |
| LEIAR25/NONE | 0.03 | 0.07 | 0.12 |


4.4. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Görres, B.; Campbell, J.; Becker, M.; Siemes, M. Absolute calibration of gps antennas: Laboratory results and comparison with field and robot techniques. GPS Solut. 2006, 10, 136–145. [Google Scholar] [CrossRef]
- Mader, G.L. GPS antenna calibration at the national geodetic survey. GPS Solut. 1999, 3, 50–58. [Google Scholar] [CrossRef]
- Rothacher, M.; Schaer, S.; Mervart, L.; Beutler, G. Determination of antenna phase center variations using GPS data. In Proceedings of the IGS Workshop on Special Topics and New Directions, Potsdam, Germany, 15–17 May 1995.
- Wübbena, G. A new approach for field calibration of absolute antenna phase center variations. Navigation 1997, 44, 247–255. [Google Scholar] [CrossRef]
- Bilich, A.; Mader, G.L. GNSS absolute antenna calibration at the national geodetic survey. In Proceedings of the 23rd International Technical Meeting of the Satellite Division of the Institute of Navigation, Portland, OR, USA, 21–24 September 2010; pp. 1369–1377.
- Schupler, B.R.; Clark, T.A.; Allshouse, R.L. Characterizations of GPS User Antennas: Reanalysis and New Results. In GPS Trends in Precise Terrestrial, Airborne, and Spaceborne Applications; Springer: Berlin, Germany, 1995. [Google Scholar]
- Rocken, C.; Meertens, C.; Stephens, B.; Braun, J.; VanHove, T.; Perry, S.; Ruud, O.; McCallum, M.; Richardson, J. Receiver and Antenna Test Report; University Navstar Consortium (UNAVCO) Academic Research Infrastructure (ARI): Boulder, CO, USA, 1995. [Google Scholar]
- Wübbena, G.; Schmitz, M. Automated absolute field calibration of GPS antennas in real-time. In Proceedings of the 13th International Technical Meeting of the Satellite Division of the Institute of Navigation, Salt Lake City, UT, USA, 19–22 September 2000.
- Schmid, R.; Rothacher, M. Estimation of elevation-dependent satellite antenna phase center variations of GPS satellites. J. Geod. 2003, 77, 440–446. [Google Scholar] [CrossRef]
- Zhu, S.Y.; Massmann, F.-H.; Yu, Y.; Reigber, C. Satellite antenna phase center offsets and scale errors in GPS solutions. J. Geod. 2003, 76, 668–672. [Google Scholar] [CrossRef]
- Rothacher, M.; Gurtner, W.; Schaer, S.; Weber, R.; Schlüter, W.; Hase, H.O. Azimuth- and Elevation-Dependent Phase Center Corrections for Geodetic GPS Antennas Estimated from GPS Calibration Campaigns. In GPS Trends in Precise Terrestrial, Airborne, and Spaceborne Applications; Springer: Berlin, Germany, 1995. [Google Scholar]
- Schmid, R.; Rothacher, M.; Thaller, D.; Steigenberger, P. Absolute phase center corrections of satellite and receiver antennas. GPS Solut. 2005, 9, 283–293. [Google Scholar] [CrossRef]
- Menge, F.; Seeber, G.; Völksen, C. Results of absolute field calibration of GPS antenna PCV. In Proceedings of the International Technical Meeting of the Satellite Division of the Institute of Navigation, Nashville, TN, USA, 15–18 September 1998.
- Huinca, S.C.M.; Krueger, C.P.; Mayer, M.; Knöpfler, A.; Heck, B. First Results of Relative Field Calibration of a GPS Antenna at BCAL/UFPR (Baseline Calibration Station for GNSS Antennas at UFPR/Brazil). In Geodesy for Planet Earth; Kenyon, S., Pacino, M.C., Marti, U., Eds.; Springer: Berlin, Germany, 2012; pp. 739–744. [Google Scholar]
- Huinca, S.C.M.; Krueger, C.P.; Heck, B.; Mayer, M.; Knöpfler, A. BCAL/UFPR: The GNSS Antenna Calibration Service of Latin America; Springer: Berlin, Germany, 2015; pp. 1–7. [Google Scholar]
- Baire, Q.; Bruyninx, C.; Legrand, J.; Pottiaux, E.; Aerts, W.; Defraigne, P.; Bergeot, N.; Chevalier, J.M. Influence of different GPS receiver antenna calibration models on geodetic positioning. GPS Solut. 2014, 18, 529–539. [Google Scholar] [CrossRef]
- Stępniak, K.; Wielgosz, P.; Baryła, R. Field tests of l1 phase centre variation models of surveying-grade GPS antennas. Stud. Geophys. Geod. 2015, 59, 394–408. [Google Scholar] [CrossRef]
- Li, Q.; Ning, B.; Zhao, B.; Ding, F.; Zhang, R.; Hongbo, S.; Yur, H.; Li, G.; Li, J.; Han, Y. Applications of the cmonoc based GNSS data in monitoring and investigation of ionospheric space weather. Chin. J. Geophys. 2012, 55, 2193–2202. (In Chinese) [Google Scholar]
- Schmitz, M.; Wübbena, G.; Boettcher, G. Tests of phase center variations of various GPS antennas, and some results. GPS Solut. 2002, 6, 18–27. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Verhagen, S.; Li, B.; Teunissen, P.J.G. Ps-LAMBDA: Ambiguity success rate evaluation software for interferometric applications. Comput. Geosci. 2013, 54, 361–376. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. An optimality property of the integer least-squares estimator. J. Geod. 1999, 73, 587–593. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, Z.; Zhao, Q.; Chen, G.; Wang, G.; Dai, Z.; Li, T. First Results of Field Absolute Calibration of the GPS Receiver Antenna at Wuhan University. Sensors 2015, 15, 28717-28731. https://doi.org/10.3390/s151128717
Hu Z, Zhao Q, Chen G, Wang G, Dai Z, Li T. First Results of Field Absolute Calibration of the GPS Receiver Antenna at Wuhan University. Sensors. 2015; 15(11):28717-28731. https://doi.org/10.3390/s151128717
Chicago/Turabian StyleHu, Zhigang, Qile Zhao, Guo Chen, Guangxing Wang, Zhiqiang Dai, and Tao Li. 2015. "First Results of Field Absolute Calibration of the GPS Receiver Antenna at Wuhan University" Sensors 15, no. 11: 28717-28731. https://doi.org/10.3390/s151128717