
Improving Ambiguity Resolution for Medium Baselines Using Combined GPS and BDS Dual/Triple-Frequency Observations

Abstract
:1. Introduction
2. Ambiguity Resolution Model
2.1. Basic Observation Equations and Definitions
2.2. EWL and WL AR
2.3. Basic AR with Ionosphere-Constrained Model
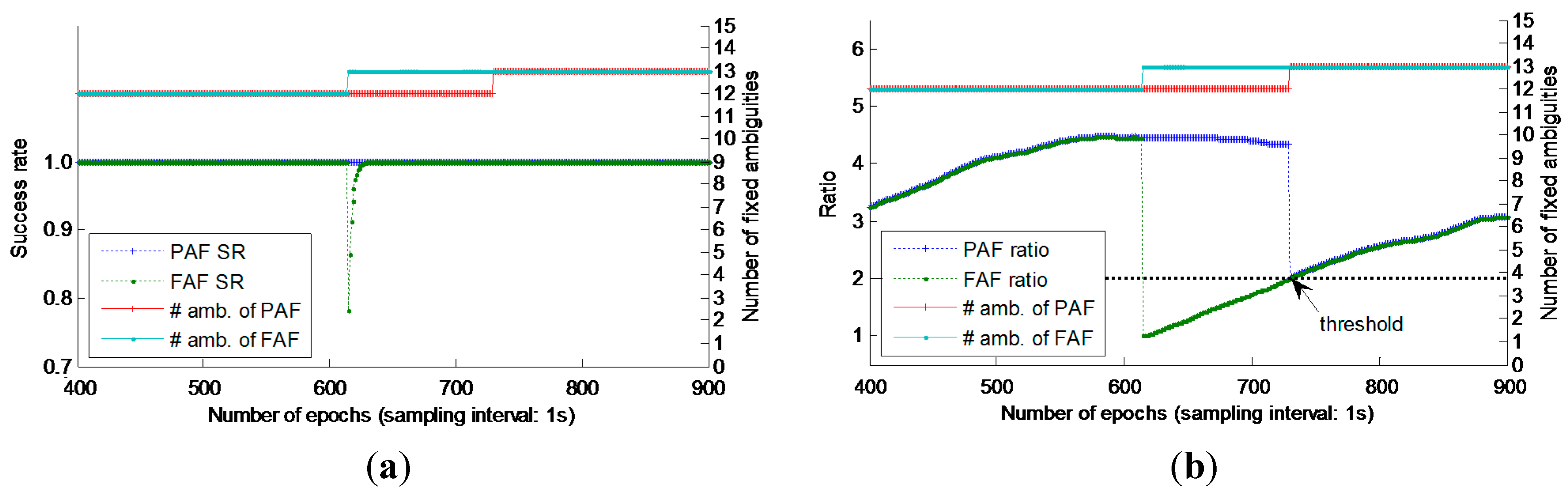
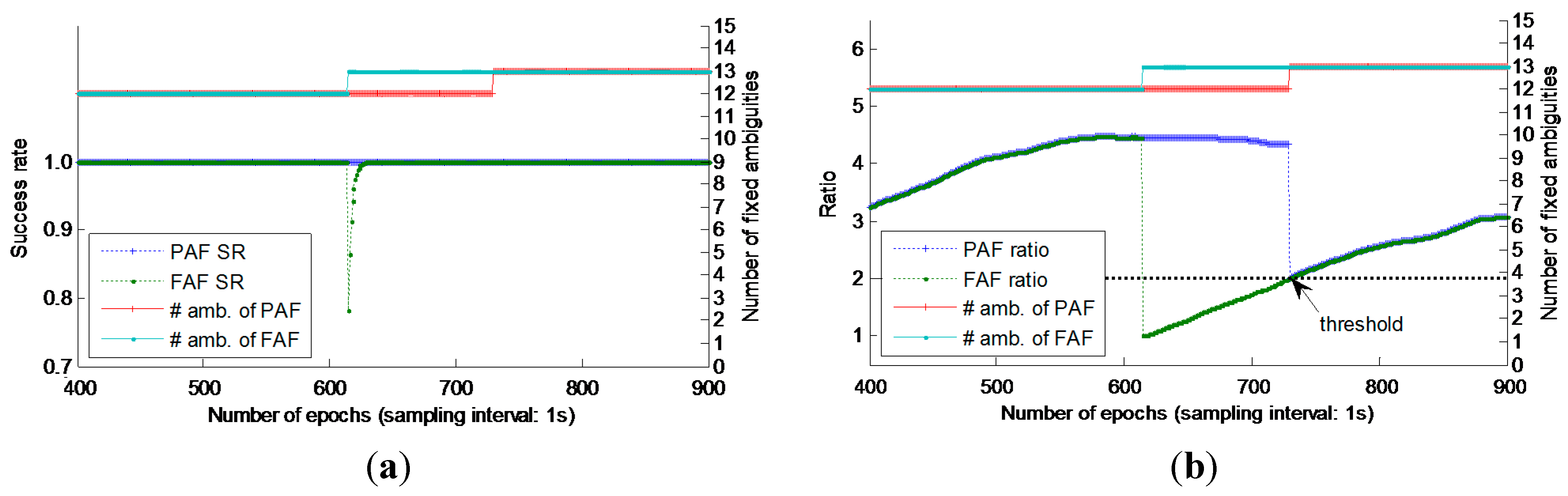
3. Partial Ambiguity Fixing Strategy
4. Experimental Analysis

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Length | Date | Duration | Interval | Location |
|---|---|---|---|---|---|
| A | 28.6 km | 6 May 2014 | 16 h | 1 s | Nanjing |
| B | 40.3 km | 7 March 2014 | 11 h | 1 s | Zhengzhou |
| C | 51.9 km | 7 March 2014 | 11 h | 1 s | Zhengzhou |
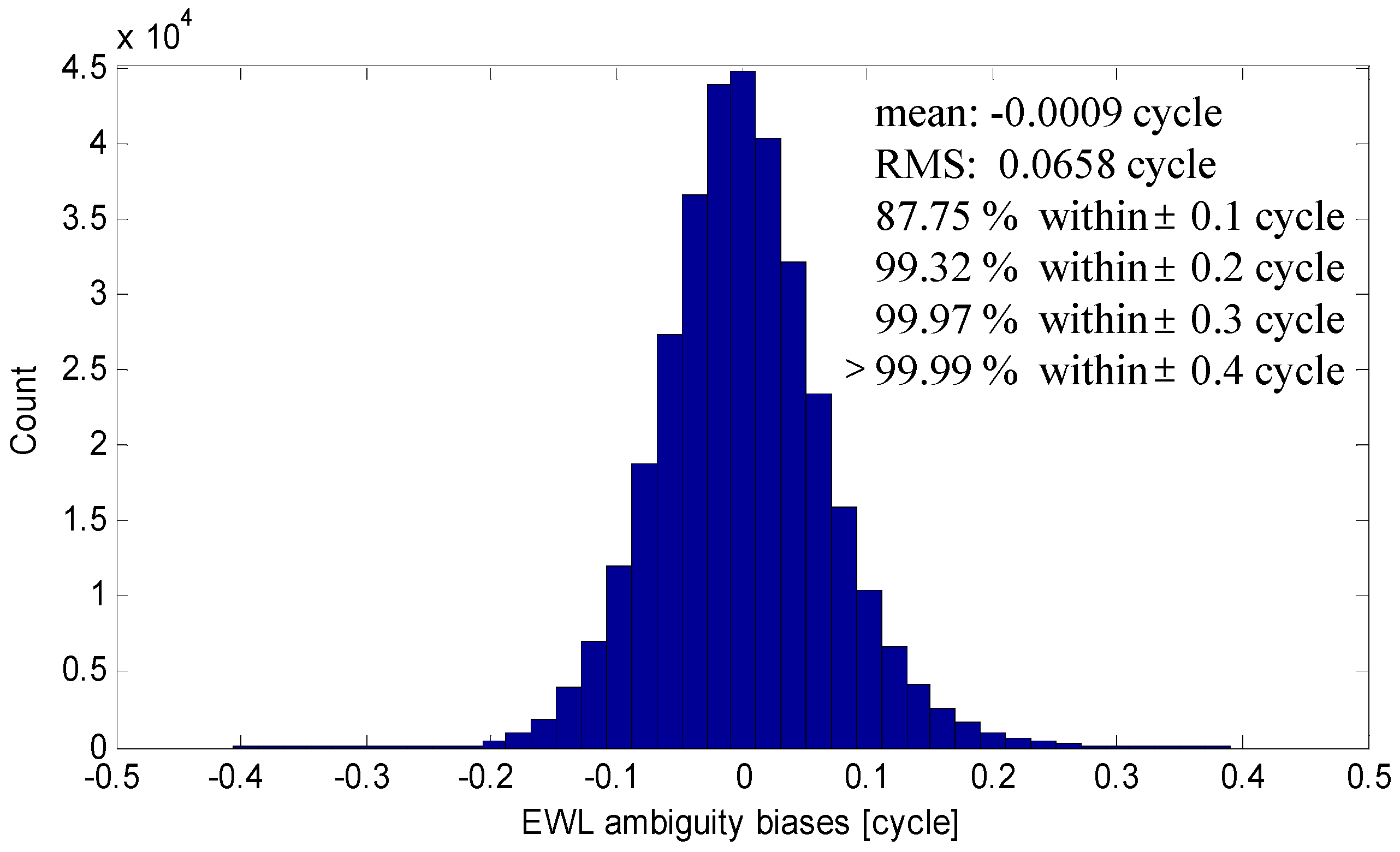
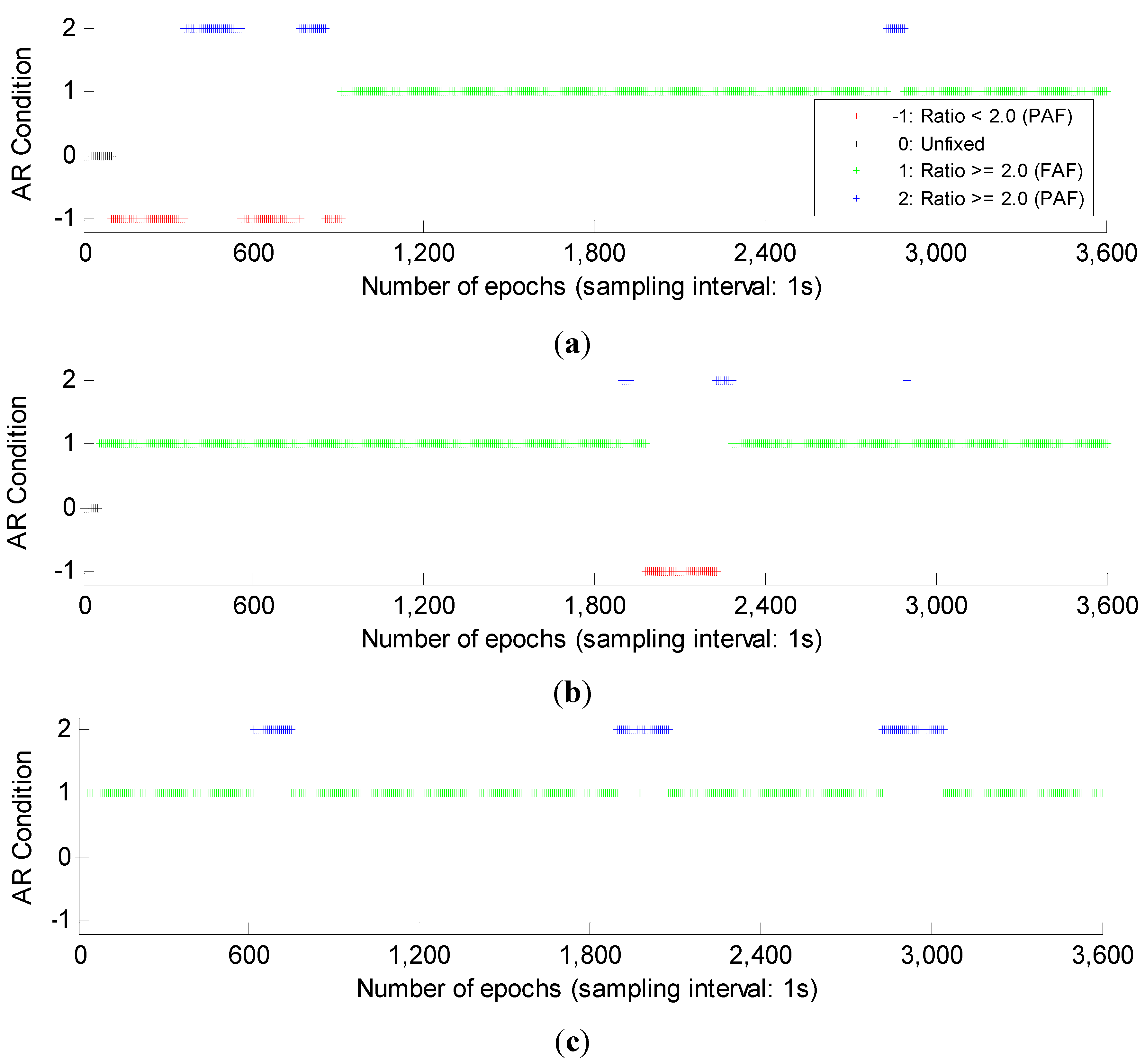
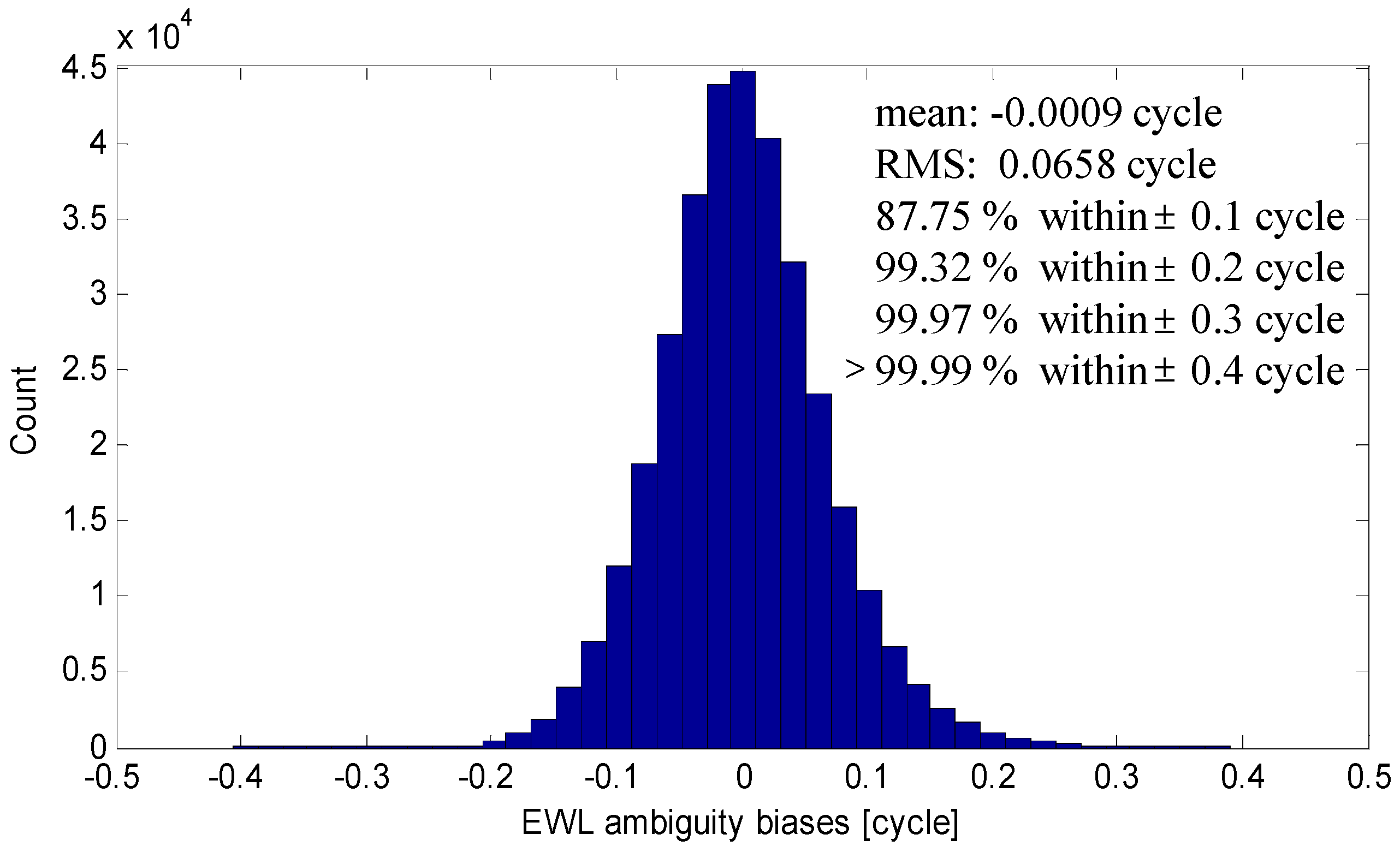
4.1. Results of EWL and WL AR
| WL AR of BDS () | WL AR of GPS () | |||||
|---|---|---|---|---|---|---|
| A | B | C | A | B | C | |
| of FAF (%) | 100 | 100 | 98.6 | 100 | >99.9 | 96.9 |
| after PAF (%) | -- | -- | 99.8 | -- | 100 | >99.9 |
| PAF strategy used (%) | 0 | 0 | 1.4 | 0 | <0.1 | 3.1 |
| Effective use of PAF | -- | -- | 85.7 | -- | 100 | >96.8 |
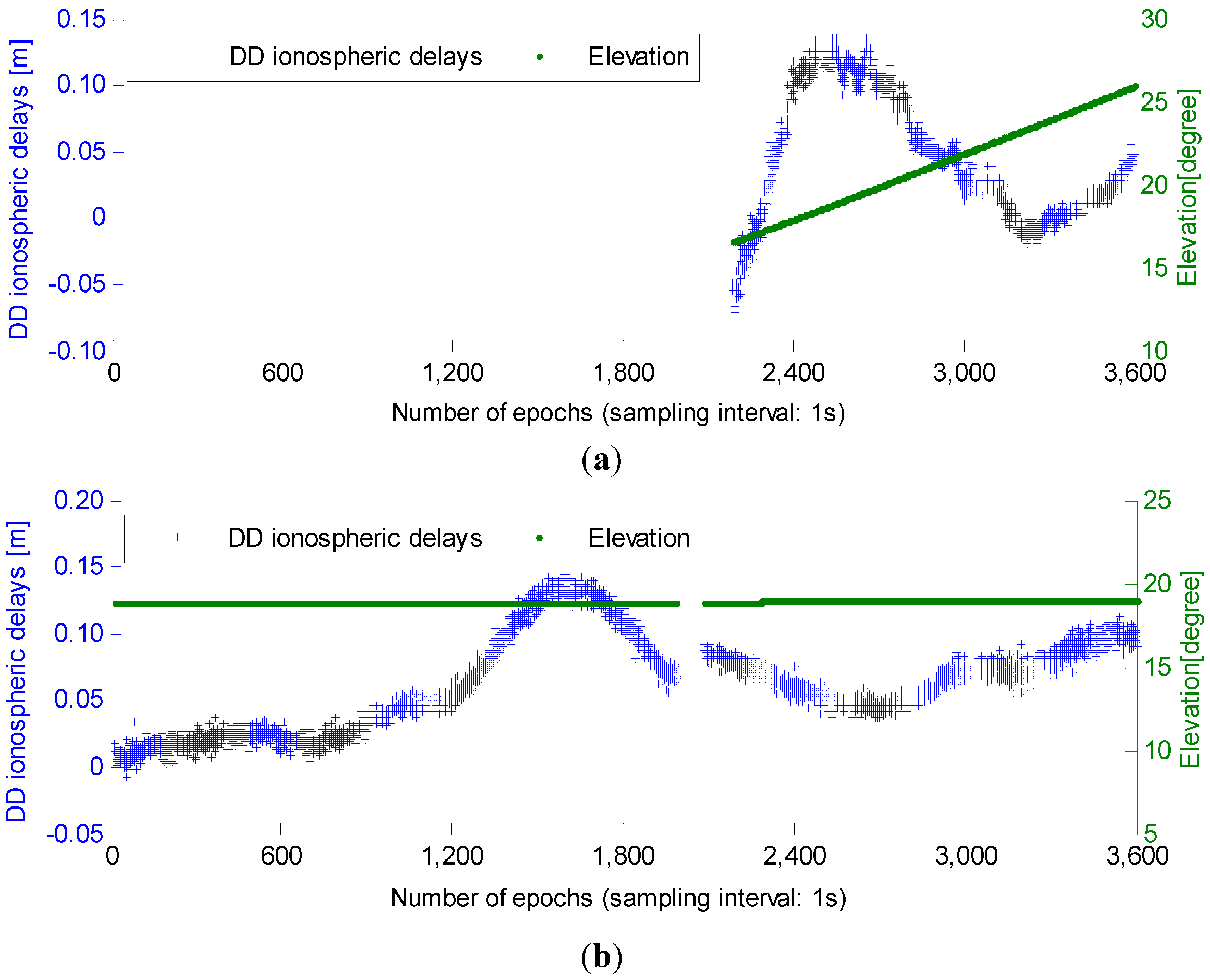
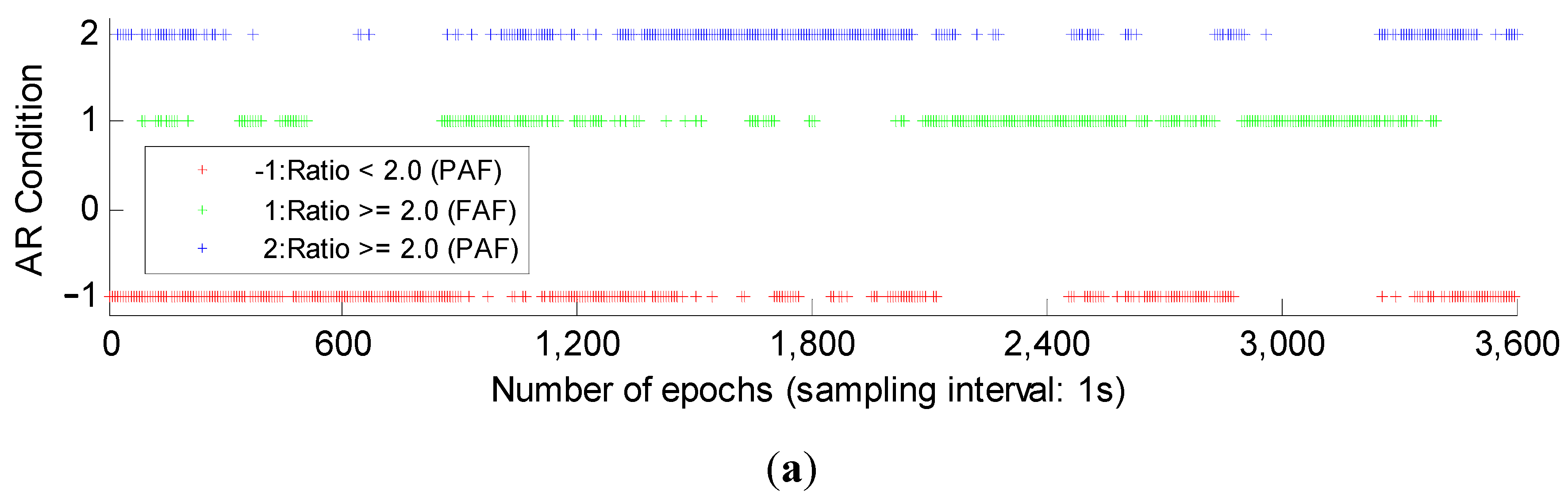
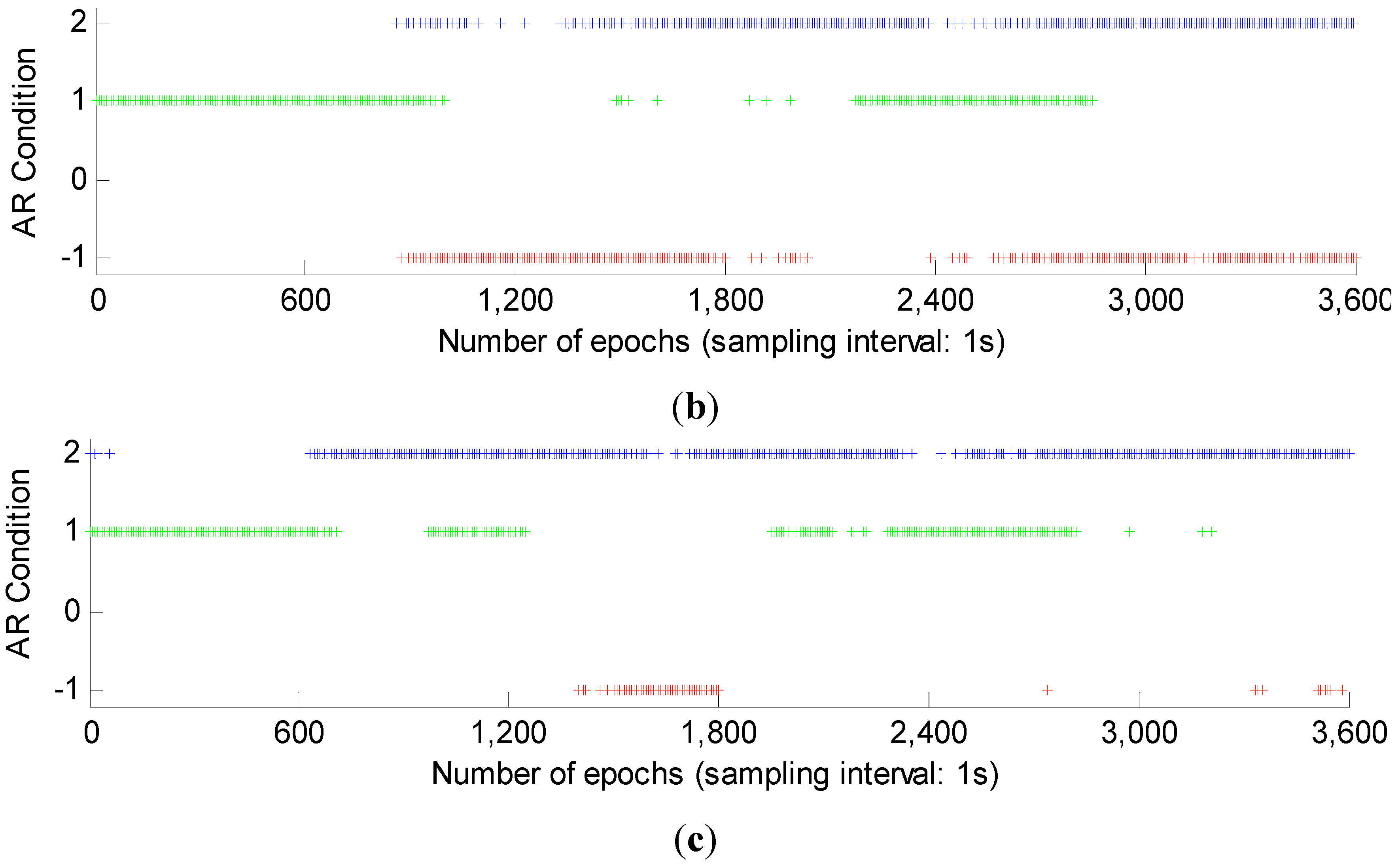
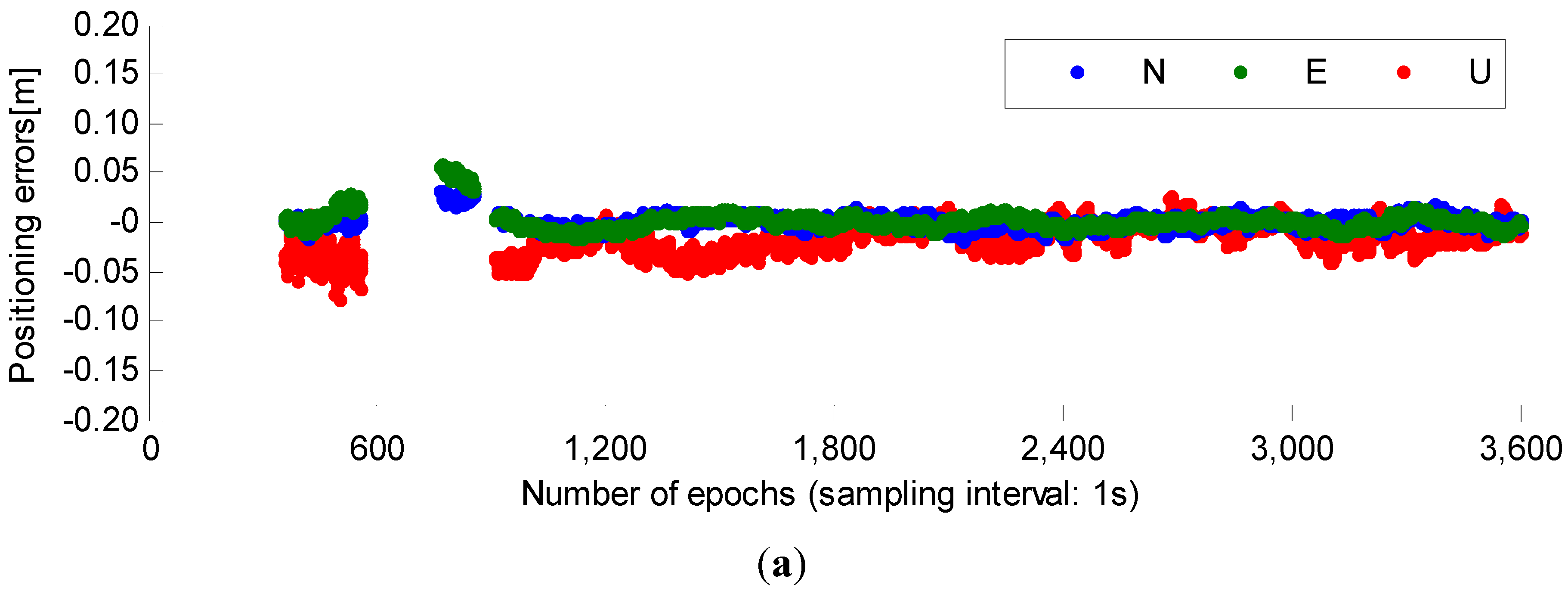
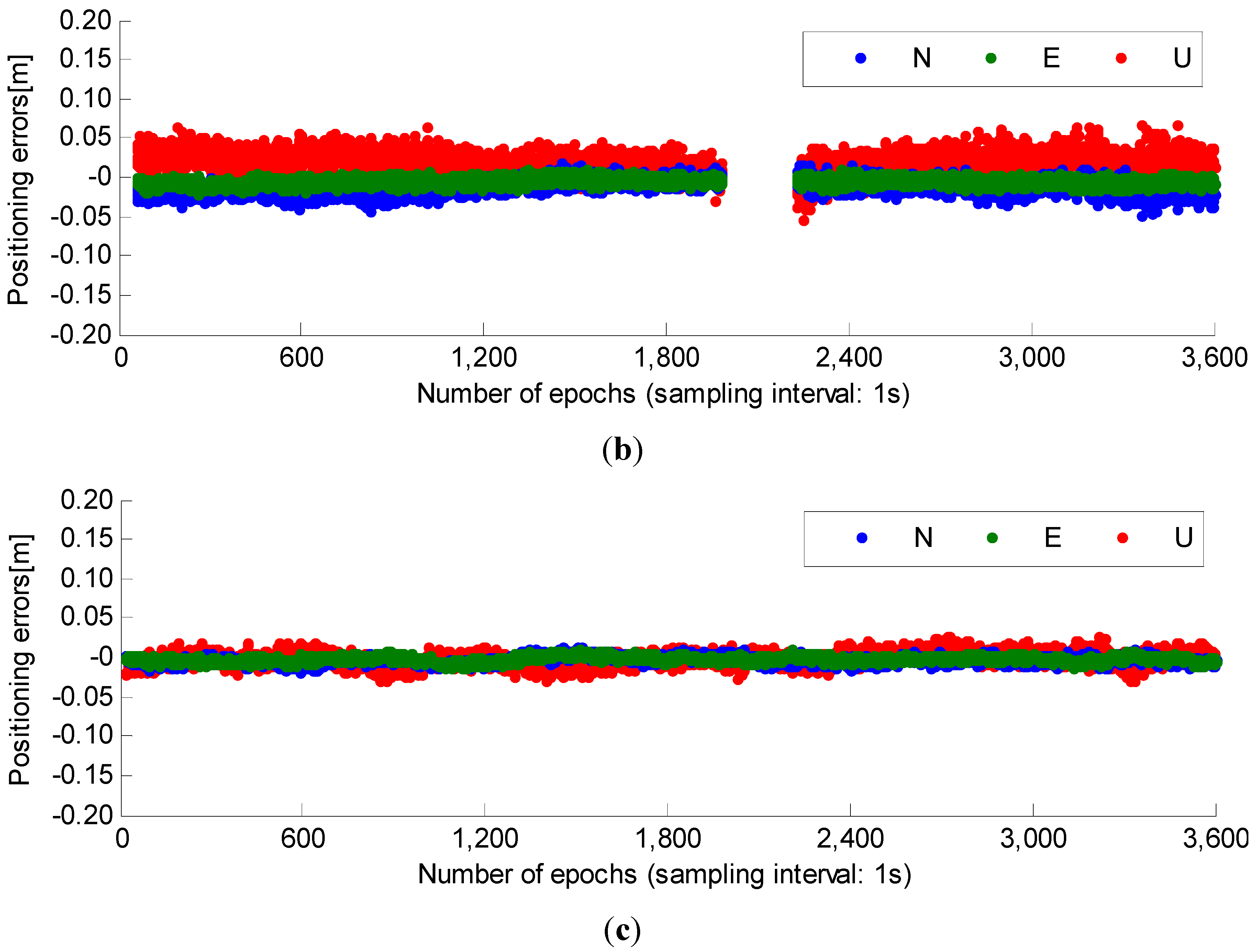
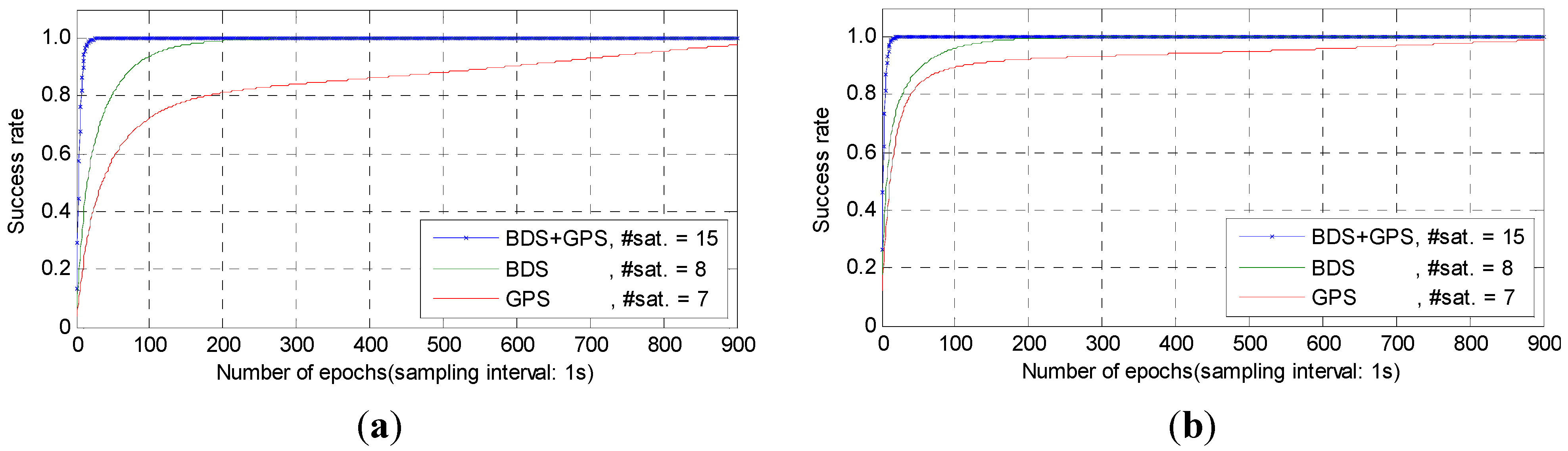
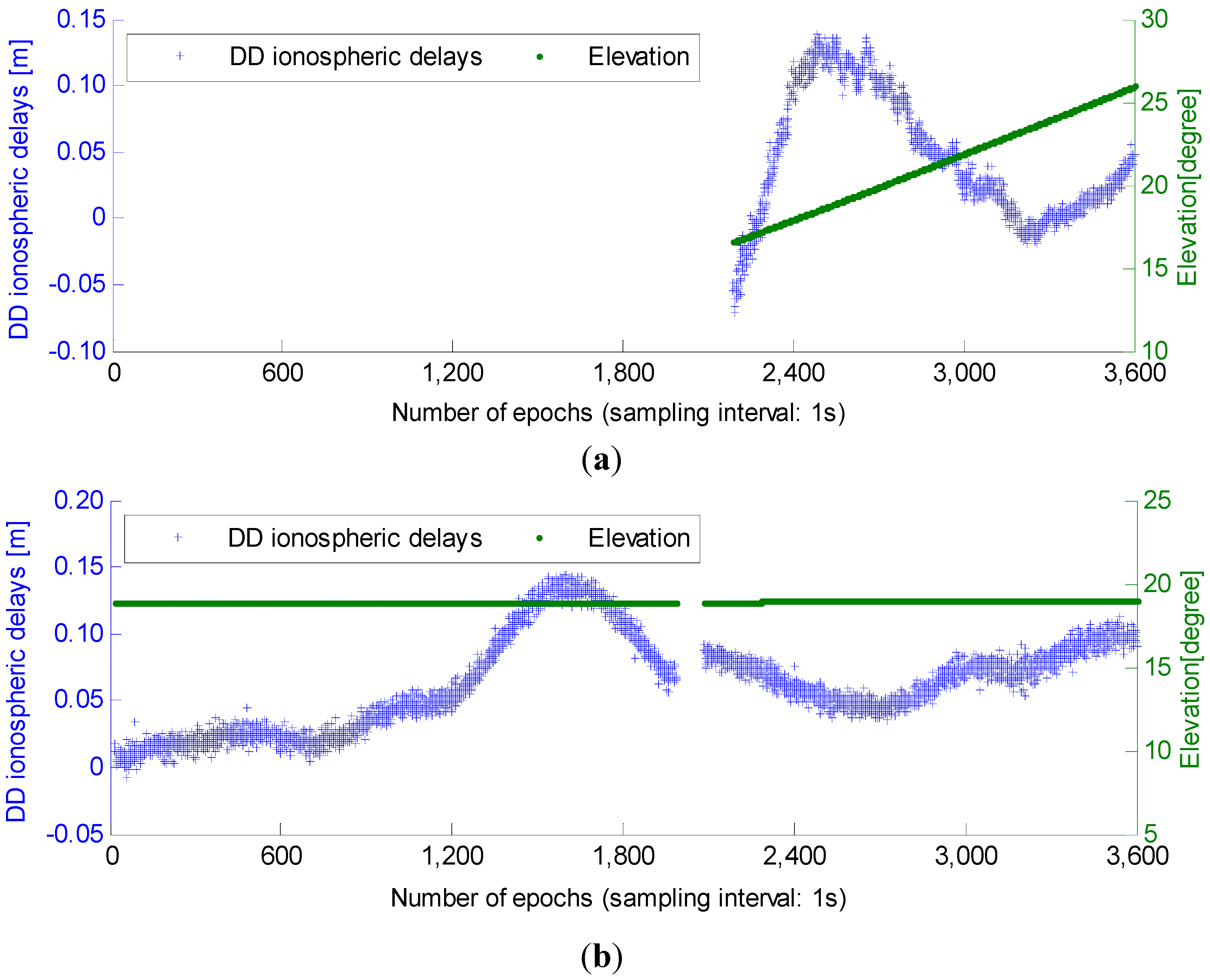
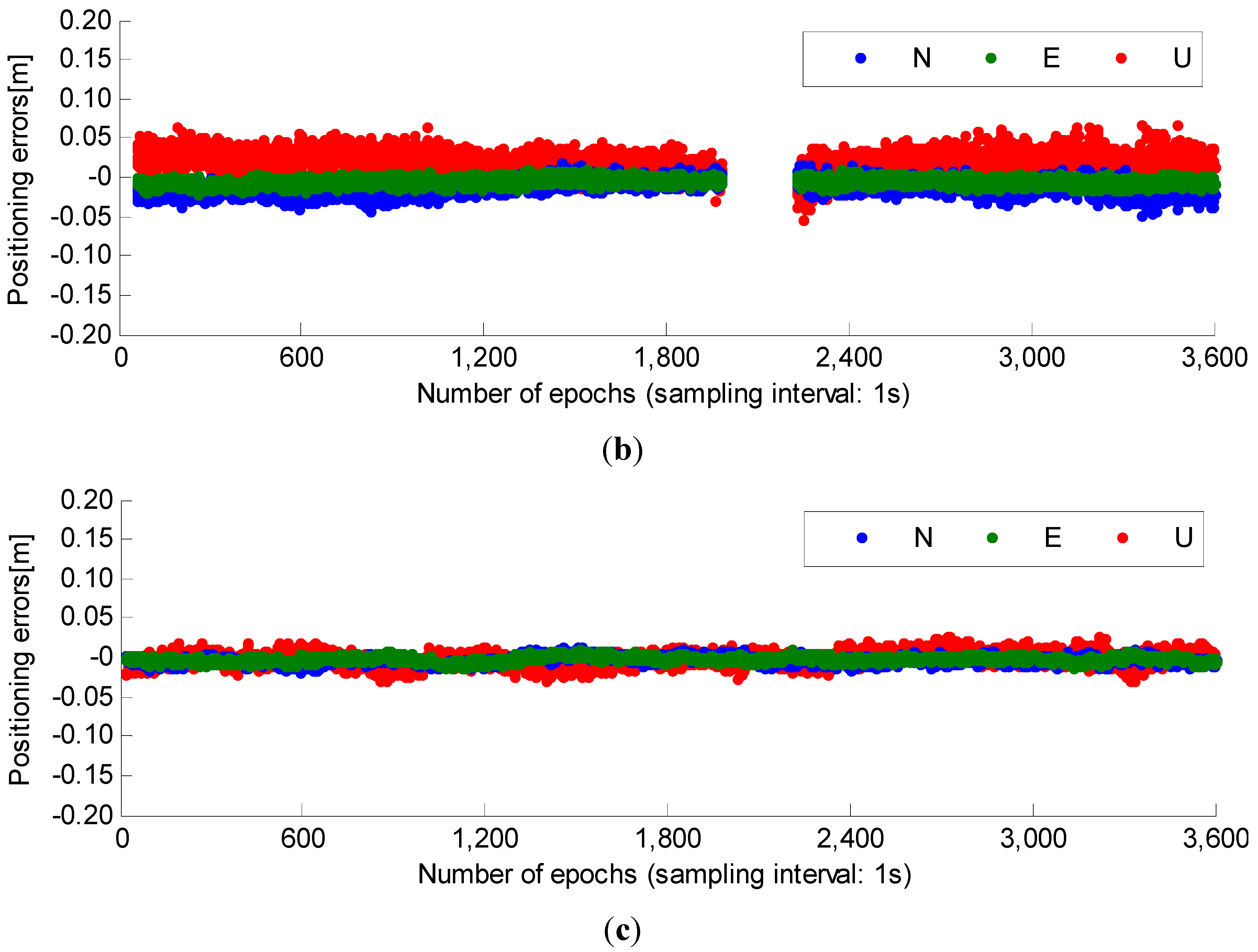
4.2. Results of Basic AR





| A | B | C | ||||
|---|---|---|---|---|---|---|
| BDS | BDS + GPS | BDS | BDS + GPS | BDS | BDS + GPS | |
| Average TTFF/s (non-ionosphere-constrained) | 74.8 | 18.6 | 81.5 | 20.7 | 81.7 | 20.2 |
| Average TTFF/s (ionosphere-constrained) | 61.1 | 13.6 | 65.8 | 15.4 | 66.0 | 15.3 |
5. Conclusions
- (1)
- Using the combined GPS and BDS dual/triple-frequency observations can improve the AR performance significantly. The EWL ambiguities of BDS can be solved very well by using the triple-frequency observations instantaneously. Then the dual-frequency WL ambiguities of BDS and GPS can be also resolved reliably with the fused geometry-based model by using the BDS ambiguity-fixed EWL observations. Most importantly, the combined system observably enhances the model strength of basic AR compared with that in the single BDS system, of course the same for single GPS system. This improves the AR reliability and significantly shortens the initialization time positioning, about 75.7% reduction on average compared with a single third-frequency BDS system.
- (2)
- The ionosphere-constrained model is proved useful to enhance the model strength, since the additional ionospheric constraints can be imposed. This especially contributes more in the beginning epochs, i.e., the initialization period, in which serious ill-posedness exists in the normal equations.
- (3)
- The PAF strategy was used both in WL and basic AR, which selects the ambiguity subset adaptively based on the successively increased elevations. It has been proved meaningful to weaken the negative influence of new-rising or low-elevation satellites.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Li, X.; Ge, M.; Dai, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef]
- Li, X.; Zhang, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Precise positioning with current multi-constellation Global Navigation Satellite Systems: GPS, GLONASS, Galileo and BeiDou. Sci. Rep. 2015, 5, 8328. [Google Scholar] [CrossRef] [PubMed]
- Odolinski, R.; Teunissen, P.J.G.; Odijk, D. Combined BDS, Galileo, QZSS and GPS single-frequency RTK. GPS Solut. 2015, 19, 151–163. [Google Scholar] [CrossRef]
- Han, H.; Wang, J.; Wang, J.; Tan, X. Performance Analysis on Carrier Phase-Based Tightly-Coupled GPS/BDS/INS Integration in GNSS Degraded and Denied Environments. Sensors 2015, 15, 8685–8711. [Google Scholar] [CrossRef] [PubMed]
- Feng, Y. GNSS three carrier ambiguity resolution using ionosphere-reduced virtual signals. J. Geod. 2008, 82, 847–862. [Google Scholar] [CrossRef]
- Li, B.; Feng, Y.; Shen, Y. Three carrier ambiguity resolution: Distance-independent performance demonstrated using semi-generated triple frequency GPS signals. GPS Solut. 2010, 14, 177–184. [Google Scholar] [CrossRef]
- Li, B.; Shen, Y.; Zhang, X. Three frequency GNSS navigation prospect demonstrated with semi-simulated data. Adv. Space Res. 2013, 51, 1175–1185. [Google Scholar] [CrossRef]
- Yang, Y.; Li, J.; Xu, J.; Tang, J.; Guo, H.; He, H. Contribution of the compass satellite navigation system to global PNT users. Chin. Sci. Bull. 2011, 56, 2813–2819. [Google Scholar] [CrossRef]
- He, H.; Li, J.; Yang, Y.; Xu, J.; Guo, H.; Wang, A. Performance assessment of single-and dual-frequency BeiDou/GPS single-epoch kinematic positioning. GPS Solut. 2014, 18, 393–403. [Google Scholar] [CrossRef]
- Li, J.; Yang, Y.; Xu, J.; He, H.; Guo, H. GNSS multi-carrier fast partial ambiguity resolution strategy tested with real BDS/GPS dual-and triple-frequency observations. GPS Solut. 2015, 19, 5–13. [Google Scholar] [CrossRef]
- Forssell, B.; Martin-Neira, M.; Harrisz, R.A. Carrier phase ambiguity resolution in GNSS-2. In Proceedings of the 10th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 1997), Kansas, MO, USA, 16–19 September 1997; pp. 1727–1736.
- Vollath, U.; Birnbach, S.; Landau, L.; Fraile-Ordoñez, J.M.; Martin-Neira, M. Analysis of Three-Carrier Ambiguity Resolution Technique for Precise Relative Positioning in GNSS-2. Navigation 1999, 46, 13–23. [Google Scholar] [CrossRef]
- Hatch, R. The promise of a third frequency. GPS World 1996, 7, 55–58. [Google Scholar]
- Jung, J. High integrity carrier phase navigation for future LAAS using multiple civilian GPS signals. In Proceedings of the 12th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 1999), Nashville, TN, USA, 14–17 September 1999; Volume 99, pp. 727–736.
- Jung, J.; Enge, P.; Pervan, B. Optimization of cascade integer resolution with three civil GPS frequencies. In Proceedings of the 13th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 2000), Salt Lake City, UT, USA, 19–22 September 2000.
- Hatch, R.; Jung, J.; Enge, P.; Pervan, B. Civilian GPS: The benefits of three frequencies. GPS Solut. 2000, 3, 1–9. [Google Scholar] [CrossRef]
- Teunissen, P.J.G.; Joosten, P.; Tiberius, C. A comparison of TCAR, CIR and LAMBDA GNSS ambiguity resolution. In Proceedings of the 15th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 2002), Portland, OR, USA, 24–27 September 2002.
- Vollath, U. The factorized multi-carrier ambiguity resolution (FAMCAR) approach for efficient carrier-phase ambiguity estimation. In Proceedings of the 17th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2004), Long Beach, CA, USA, 21–24 September 2004; pp. 2499–2508.
- Feng, Y.; Rizos, C. Three carrier approaches for future global, regional and local GNSS positioning services: Concepts and performance perspectives. In Proceedings of the 18th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2005), Long Beach, CA, USA, 13–16 September 2005; Volume 16, pp. 2277–2287.
- Hatch, R. A new three-frequency, geometry-free technique for ambiguity resolution. In Proceedings of the 19th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2006), Fort Worth, TX, USA, 26–29 September 2006; pp. 26–29.
- Feng, Y.; Li, B. A benefit of multiple carrier GNSS signals: Regional scale network-based RTK with doubled inter-station distances. J. Spat. Sci. 2008, 53, 135–147. [Google Scholar] [CrossRef]
- Wang, K.; Rothacher, M. Ambiguity resolution for triple-frequency geometry-free and ionosphere-free combination tested with real data. J. Geod. 2013, 87, 539–553. [Google Scholar] [CrossRef]
- Zhang, X.; He, X. Performance analysis of triple-frequency ambiguity resolution with BeiDou observations. GPS Solut. 2015. [Google Scholar] [CrossRef]
- Tang, W.; Deng, C.; Shi, C.; Liu, J. Triple-frequency carrier ambiguity resolution for Beidou navigation satellite system. GPS Solut. 2014, 18, 335–344. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Teunissen, P.J.G.; Joosten, P.; Tiberius, C. Geometry-free ambiguity success rates in case of partial fixing. In Proceedings of the 1999 National Technical Meeting of The Institute of Navigation (ION-NTM 1999), San Diego, CA, USA, 25–27 January 1999.
- Böhm, J.; Möller, G.; Schindelegger, M.; Pain, G.; Weber, R. Development of an improved empirical model for slant delays in the troposphere (GPT2w). GPS Solut. 2015, 19, 433–441. [Google Scholar] [CrossRef]
- Dach, R.; Hugentobler, U.; Fridez, P.; Meindl, M. Bernese GPS Software; Version 5.0; Astronomical Institute: University of Bern, Bern, Switzerland, 2007. [Google Scholar]
- Odijk, D. Weighting ionospheric corrections to improve fast GPS positioning over medium distances. In Proceedings of the 13th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 2000), Salt Lake City, UT, USA, 19–22 September 2000; pp. 1113–1123.
- Li, B.; Shen, Y.; Feng, Y.; Gao, W.; Yang, L. GNSS ambiguity resolution with controllable failure rate for long baseline network RTK. J. Geod. 2014, 88, 99–112. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. Success probability of integer GPS ambiguity rounding and bootstrapping. J. Geod. 1998, 72, 606–612. [Google Scholar] [CrossRef]
- Teunissen, P.J.G.; Verhagen, S. The GNSS ambiguity ratio-test revisited: A better way of using it. Surv. Rev. 2009, 41, 138–151. [Google Scholar] [CrossRef]
- Verhagen, S.; Teunissen, P.J.G. The ratio test for future GNSS ambiguity resolution. GPS Solut. 2013, 17, 535–548. [Google Scholar] [CrossRef]
- Li, B.; Shen, Y.; Feng, Y. Fast GNSS ambiguity resolution as an ill-posed problem. J. Geod. 2010, 84, 683–698. [Google Scholar] [CrossRef]
- Pan, S.; Gao, W.; Wang, S.; Meng, X.; Wang, Q. Analysis of ill posedness in double differential ambiguity resolution of BDS. Surv. Rev. 2014, 46, 411–416. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, W.; Gao, C.; Pan, S.; Wang, D.; Deng, J. Improving Ambiguity Resolution for Medium Baselines Using Combined GPS and BDS Dual/Triple-Frequency Observations. Sensors 2015, 15, 27525-27542. https://doi.org/10.3390/s151127525
Gao W, Gao C, Pan S, Wang D, Deng J. Improving Ambiguity Resolution for Medium Baselines Using Combined GPS and BDS Dual/Triple-Frequency Observations. Sensors. 2015; 15(11):27525-27542. https://doi.org/10.3390/s151127525
Chicago/Turabian StyleGao, Wang, Chengfa Gao, Shuguo Pan, Denghui Wang, and Jiadong Deng. 2015. "Improving Ambiguity Resolution for Medium Baselines Using Combined GPS and BDS Dual/Triple-Frequency Observations" Sensors 15, no. 11: 27525-27542. https://doi.org/10.3390/s151127525