1. Introduction
Optical fiber sensors (OFS) are established as a pillar in the sensing technology landscape [
1]. Compared to mainstream sensing systems, such as micro-electromechanical systems and wireless sensor networks, OFS possess specific advantages: microscopic size of the sensors and delivery fibers, immunity to electromagnetic interference, biological compatibility, resistance to corrosion and chemical agents, and the possibility to operate over distances ranging from a few millimeters to tens of kilometers along a single fiber. Currently, OFS are well established in the detection of physical and electrical parameters, and growing in the biochemical sensors niche.
From the point of view of the sensing system as a whole, one of the main trends of OFS-based technologies is to operate the spectral detection in the optical spectrum domain. In this framework, the sensor acts as a wavelength-selective element, such as a narrowband filter, a cavity, or an absorption peak; this wavelength pattern introduced by the sensor changes as the measurand is subjected to variations. Thus, the interrogation system detects the spectrum of the sensor, and records its variations.
A large number of optical fiber sensing systems operate with this approach. Fiber Bragg gratings (FBGs) [
2,
3,
4,
5,
6,
7,
8] are the most popular type of such sensors. FBGs are reflection filters, with a very narrow bandwidth, and are sensitive to both strain and temperature, with a nearly instantaneous response. The recent advances on FBG fabrication [
9,
10], as well as the possibility to inscribe several FBGs operating on the same fiber in a wavelength-division multiplexing (WDM) approach [
11], are elevating FBGs as an inexpensive, compact, and well performing technology, with several applications in structural health monitoring [
5,
6], infrastructures [
11], oil and gas [
7,
8], and medical devices [
12,
13] among others. In addition to uniform FBGs, the literature also features several types of grating-based fiber sensors. These include chirped gratings [
14,
15], that allow temperature and strain detection on a distributed length; tilted gratings [
2,
16,
17], particularly suited for biochemical sensing; and long-period gratings (LPGs) [
18,
19], which are transmission gratings with a broadband response. A second class of sensors is represented by Fabry-Perot interferometry (FPI) [
20,
21,
22,
23,
24,
25,
26]: FPI sensors are based on a short cavity within the optical fiber, which generates a broadband spectral variation with a periodic pattern. Extrinsic FPI sensors are one of the main architectures for pressure sensing in medical devices [
22,
23,
24], as well as pressure and temperature sensing in pipelines [
25,
26]. A third class of wavelength-encoded sensors features architectures for biochemical sensors: most notably, fiber-optic sensors based on surface plasmon resonance (SPR) [
27], single-multi-single mode (SMS) structures, tapered fibers [
28] produce spectral absorption peaks at a specific wavelength.
As FPI and FBGs allow physical and biochemical sensing within a short active length, one of the main trends in OFS is the integration of multiple sensing elements on a single fiber. A hybrid FPI/FBG structure has been first proposed by Bremer
et al. [
29,
30], and subsequently expanded for dual temperature and pressure detection [
31,
32,
33]. With the latest improves in sensor fabrication, the evolution of multi-parameter sensing leans to the lab-in-a-fiber platform.
All these typologies of single- and multi-parameter OFS have interrogation based on spectral detection, which significantly differs from other approaches such as interferometry of intensity-based transducing [
34,
35]. Typical interrogation systems detect the spectrum reflected by the sensing structure on a wavelength interval ranging from 40 nm to 80 nm [
36,
37,
38,
39]. Most systems are based on a broadband light source and a spectrometer for detection [
36,
37]. This approach is straightforward, provides long-term stability, and is relatively inexpensive; but on the other hand, the spectrum is sampled with a coarse wavelength resolution, typically 512 samples over 40 nm or 80 nm interval. The main alternative is represented by an interrogation system based on a scanning laser [
38] or a scanning filter [
37] and a photodetector: this method provides a denser sampling (1–10 pm) but requires to stabilize and isolate the laser source and isolate, which results in a more expensive system operating in a lower signal to noise ratio (SNR).
A method that estimates spectral shifts of FBG, FPI, and similar sensors is needed in order to estimate the measurand. Over the past decade, several techniques have been proposed for FBG detection. The simplest methods are based on centroid, curve fitting, or other interpolation routines; such routines are now part of several commercial interrogators [
36,
38]. The spectral correlation method, proposed by Gong
et al. [
40] and Caucheteur
et al. [
41] provides a significant improvement: it is capable of working even in very low SNR conditions, but it is still limited to the resolution of the interrogation system. In 2014, Lamberti
et al. [
42] proposed a method based on fast Fourier transform (FFT): this technique estimates the FBG wavelength shift with 7–35 femtometer accuracy with 10 pm sampling grid.
Similar techniques have also been proposed for FPI sensors [
20], in order to measure the variations of the Fabry-Perot cavity. Recent advances have been proposed by Tosi
et al. [
43], with a method based on adaptive filtering. In 2014, Ushakov and Liokumovich analyzed the resolution limits of FPI sensors, based on interrogation detection [
44]. The interrogation of dual FBG/FPI sensors has been proposed by Bremer
et al. [
29], using two sources (laser and LED) to separate FBG and FPI spectra. Other approaches separate the spectral portion containing the FBG from the spectrum, and use the remaining part to interrogate the FPI sensor [
31].
In this article, the author aims at introducing a new demodulation technique for FBG, FPI, and nearly all class of sensors based on spectral detection. The method is based on Karhunen-Loeve Transform (KLT) [
45,
46,
47] applied to the sensor spectrum. As framed by Maccone [
46], the KLT is effective when in decoding the energy of the input signal, and encodes they key information in its high-tank eigenvalues. KLT-based interrogation was introduced in 2015 for the first time in FBG sensing [
47]. In this article, the KLT method will be discussed also for FPI sensors, and hybrid FBG/FPI sensors. Then, with suitable variations, the method will be expanded to a plurality of sensors operating on the same spectral range, isolating the individual contributions.
The paper is arranged as follows:
Section 2 describes the tracking method based on KLT;
Section 3 describes the KLT applied to individual sensors (FBG and FPI);
Section 4 describes the KLT applied to hybrid FBG/FPI sensors; in
Section 5, a variation of the KLT is proposed to provide interrogation of more complex multi-parameter sensing structures;
Section 6 shows some experimental results for FBG and FPI sensing; finally,
Section 7 draws conclusions.
2. KLT-Based Tracking Method
The detection of FBGs and FPIs is performed with an interrogation device based on a spectrometer. The spectrometer discretizes the optical spectrum on both wavelength and amplitude axes. The spectrum is then regarded as a digital signal
S[
λ], sampled over the
N-size wavelength grid
λ1,
λ2, …,
λN, with uniform wavelength step δ
λ. Also the spectral amplitude is sampled on a grid with δ
S quantization step. The spectrum
S[
λ], hereby regarded as a digital signal, can be expressed as the useful spectrum of sensors, with additive noise:
where
R[
λ] is the useful spectrum (typically, the reflection spectrum of cascade of sensors) and
N[
λ] is noise. The SNR is defined as the ratio between
R and
N variances:
The first step towards estimating wavelength shifts, following Lamberti′s approach [
40], is computing the FFT of the spectrum
S[
λ]:
where
f1, …,
fN is the normalized frequency. The new digital variable
G(
f) is then transformed into its symmetric Toeplitz matrix:
where
Gi = G(
fi).
Then, the KLT of the matrix
is finally performed. The KLT takes the matrix
as input, and identifies an orthonormal basis
over which it is represented [
45,
46]. In this case, a simple version of KLT is implemented, using the singular value decomposition (SVD):
where
is a diagonal matrix containing all the eigenvalues of
on its main diagonal, and
is its corresponding orthonormal basis that contains on its lines the eigenvectors. Computationally, the SVD is performed using the Cholesky decomposition.
The matrix
contains the
N eigenvalues; as
is symmetric, all its eigenvalues are real numbers. The eigenvalue string is called
ξ and is sorted in ascending order:
As noted by Maccone [
46], the eigendecomposition is well effective in separating signal from noise. Low-rank eigenvalues, and their correspondent eigenvectors, are mostly affected by noise; conversely, the high-rank eigenvalues confine most of the useful signal energy. As discussed in the next sections, the analysis of the eigenvalue string
ξ is the core of the optical fiber sensors interrogation.
4. Interrogation of Hybrid FBG/FPI Sensors
The KLT can be employed not only to interrogate FBG and FPI sensors, but also as a tool to interrogate hybrid FBG/FPI sensors [
31,
32,
33,
34,
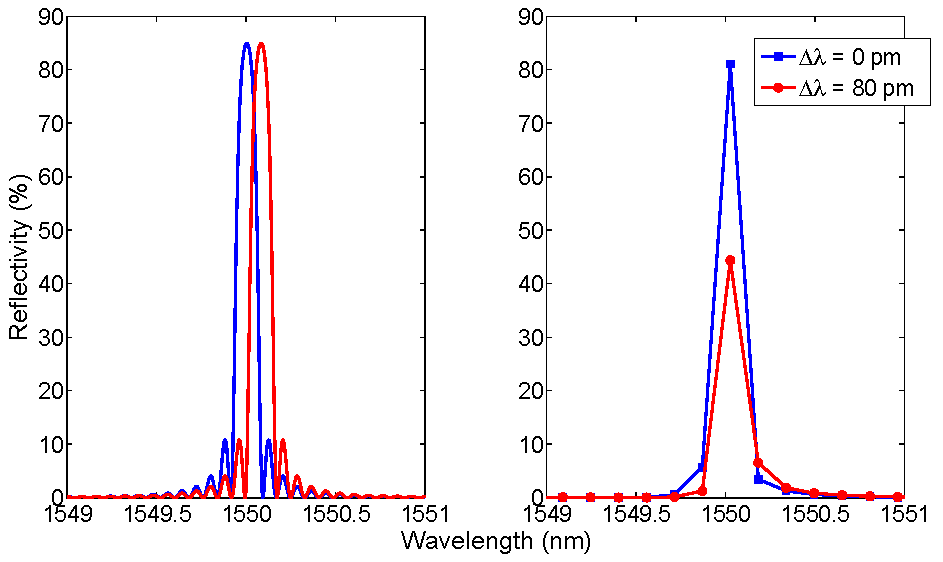
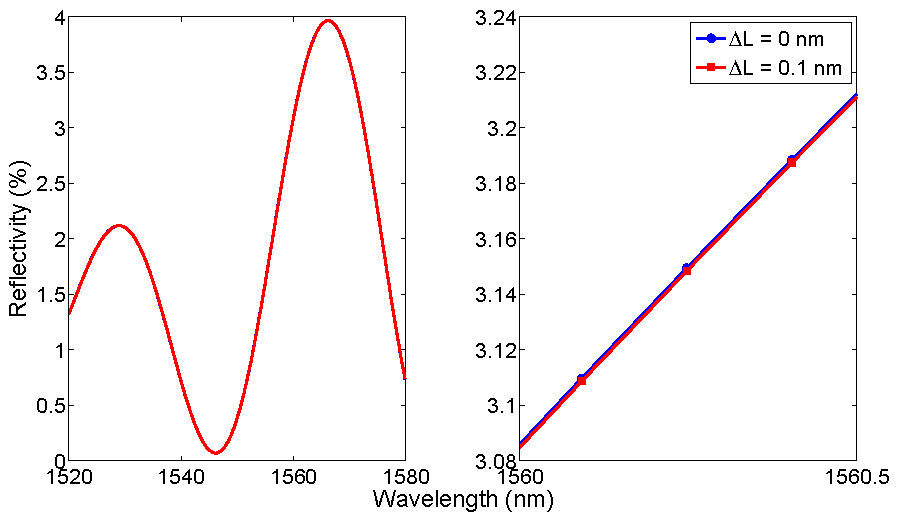
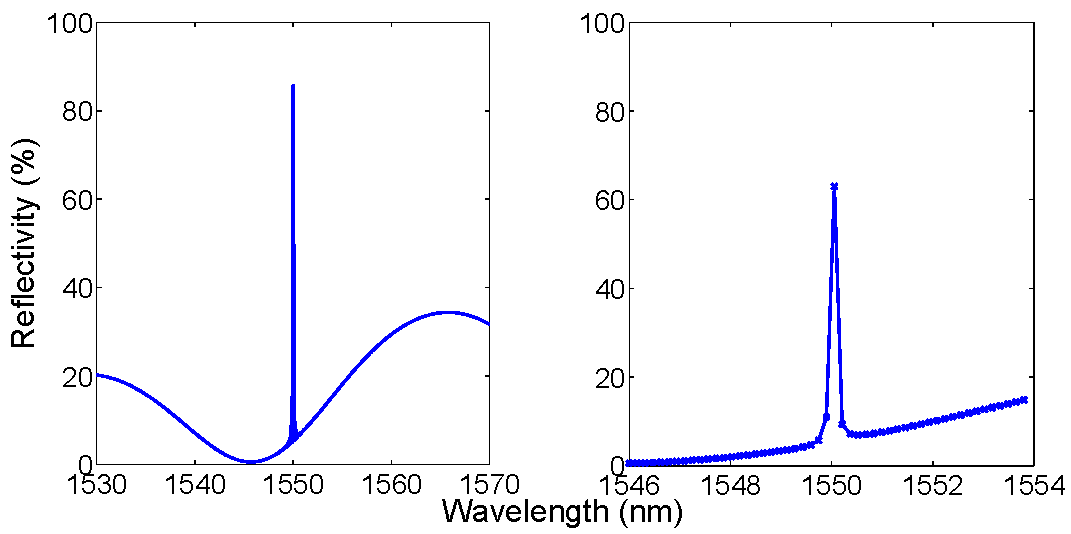
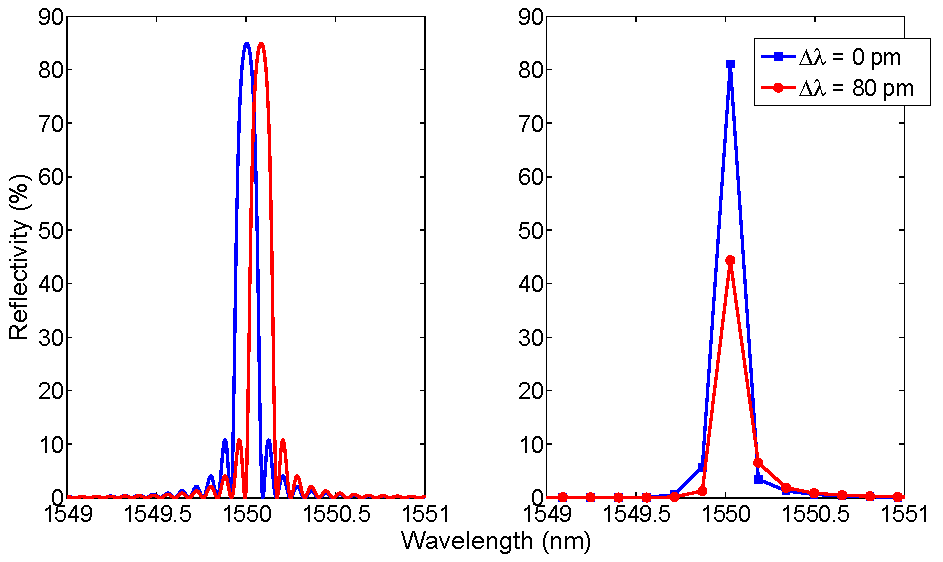
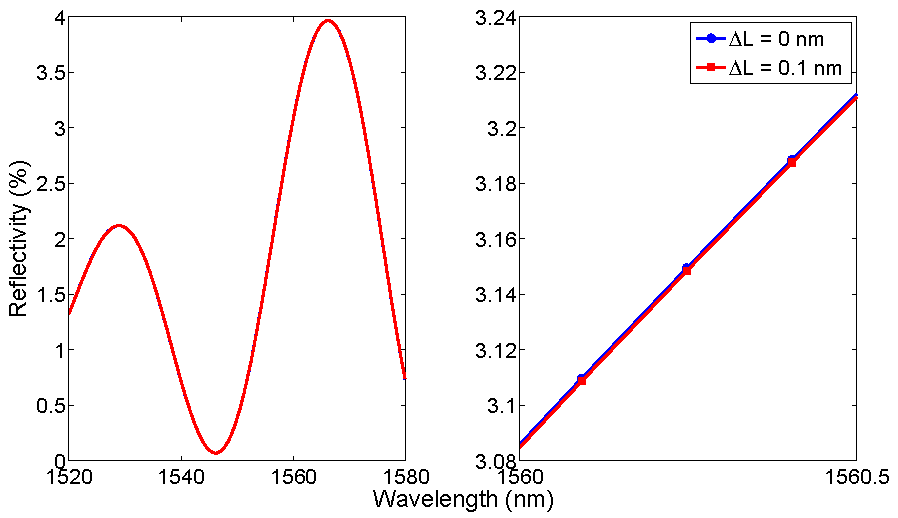
35]. The spectrum of a dual FBG/FPI sensor has been simulated by combining the FBG in
Figure 1 with the FPI in
Figure 2. The spectrum of the combined sensor is shown in
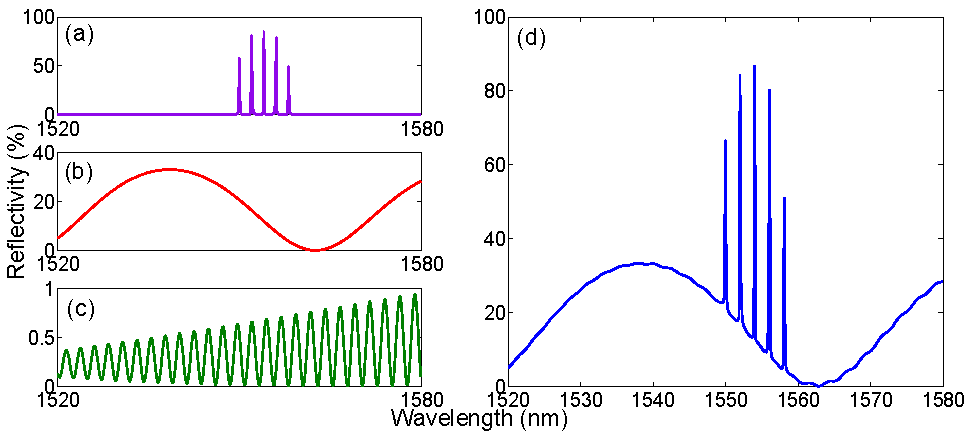
Figure 10. It results as a combination of FPI and FBG individual spectra, and subjected to both wavelength shifts of the Bragg wavelength and variations of the Fabry-Perot cavity length [
35].
Figure 10.
Spectrum of dual EFPI/FBG sensor. (Left) original spectrum; (Right) spectrum after 156-pm sampling and N-size framing.
Figure 10.
Spectrum of dual EFPI/FBG sensor. (Left) original spectrum; (Right) spectrum after 156-pm sampling and N-size framing.
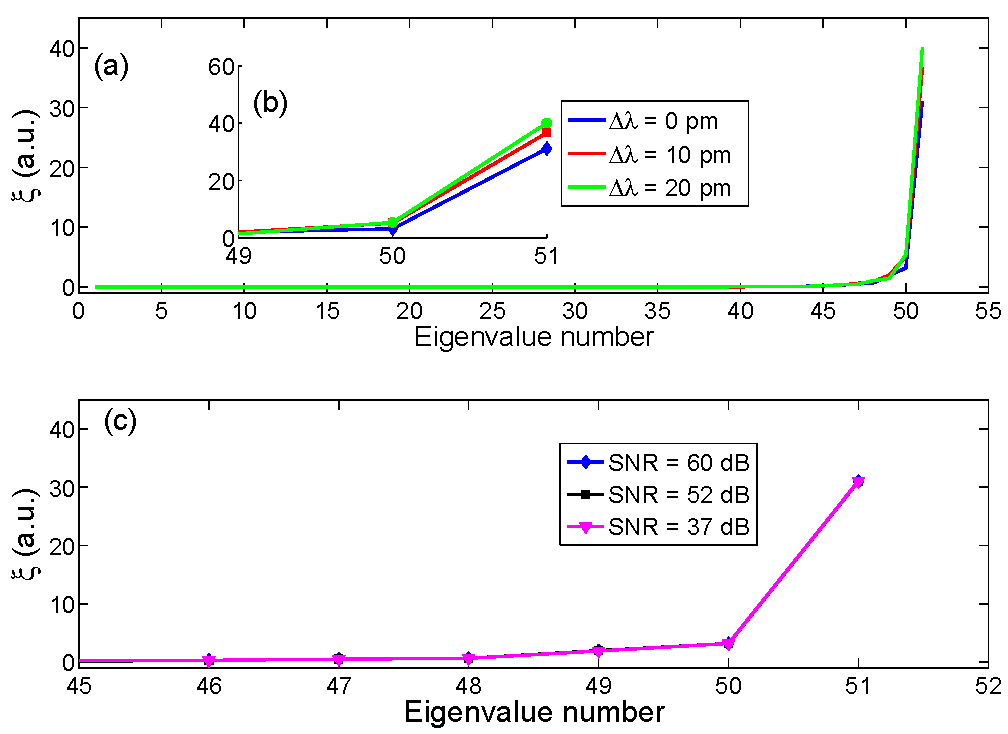
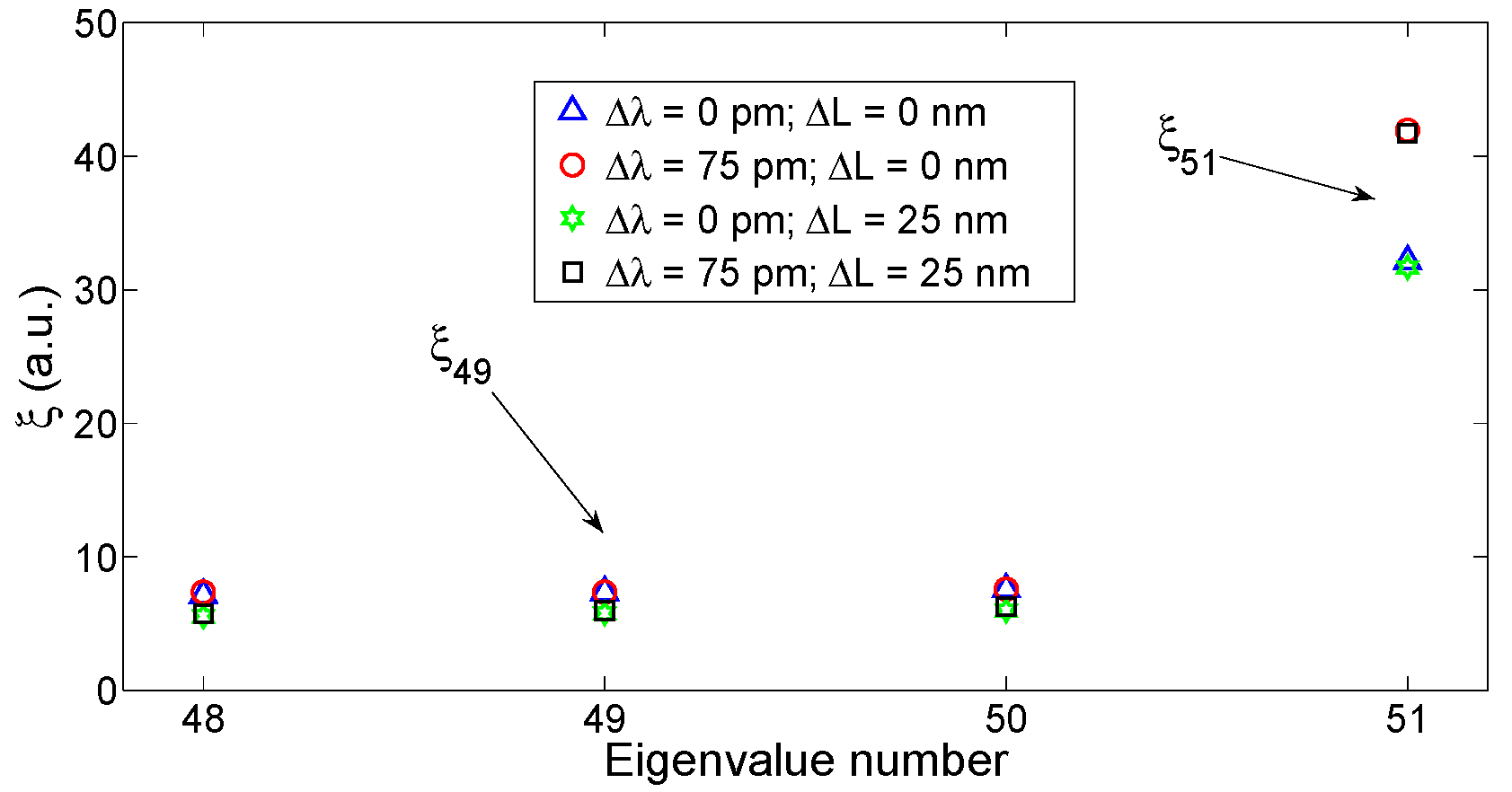
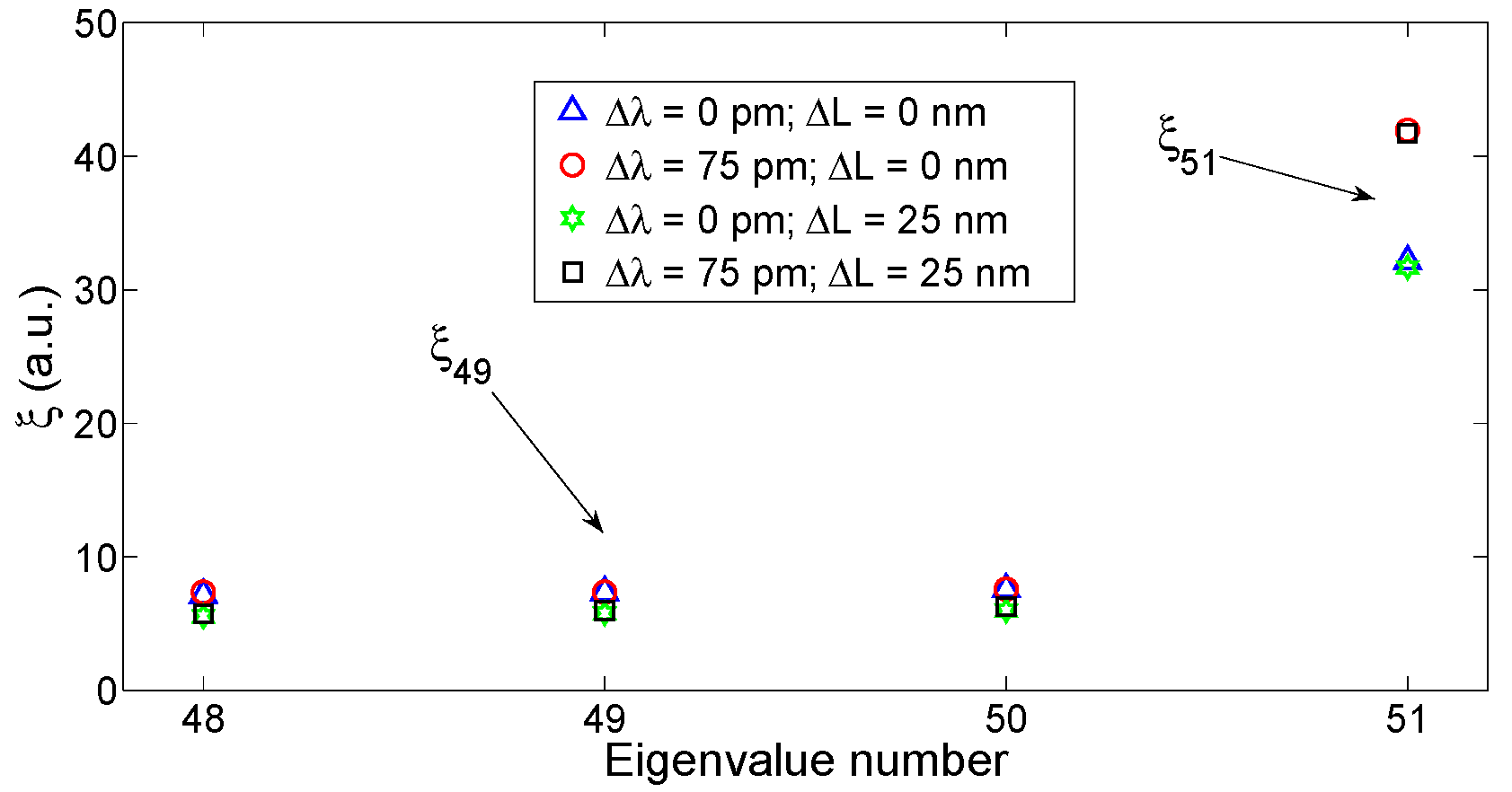
The results of the KLT eigendecomposition, applied to the FBG/FPI spectrum with different values of Δλ and ΔL, is shown in
Figure 11. On one side, it is possible to notice that the main eigenvalue (ξ
51 = ξ
N) is substantially dependent only on Δλ, and approximately independent on ΔL. When the FBG is shifted by Δλ = 75 pm, ξ
N increases by 10.1; the residual variation due to ΔL is 0.2 (approximately 2%). On the other side, lower rank eigenvalues such as ξ
49 = ξ
N−2 exhibit the opposite pattern: they depend mainly on the FPI cavity length, whereas they are almost independent on Δλ.
This capability of the KLT to separate the FPI from the FBG can be well exploited for dual interrogation. In a first scenario, both the FBG and the FPI sensors are subjected to relatively large variations. This is a common framework in oil and gas and geothermal engineering, whereas the FBG/FPI operates for detection of high temperature (–20°C to >200°C) and high pressure (up to 100 bar) [
26,
56], as well as in structural engineering, whereas the FBG/FPI structure detects strain and forces [
6].
In this condition, it is possible to exploit the separation provided by the KLT.
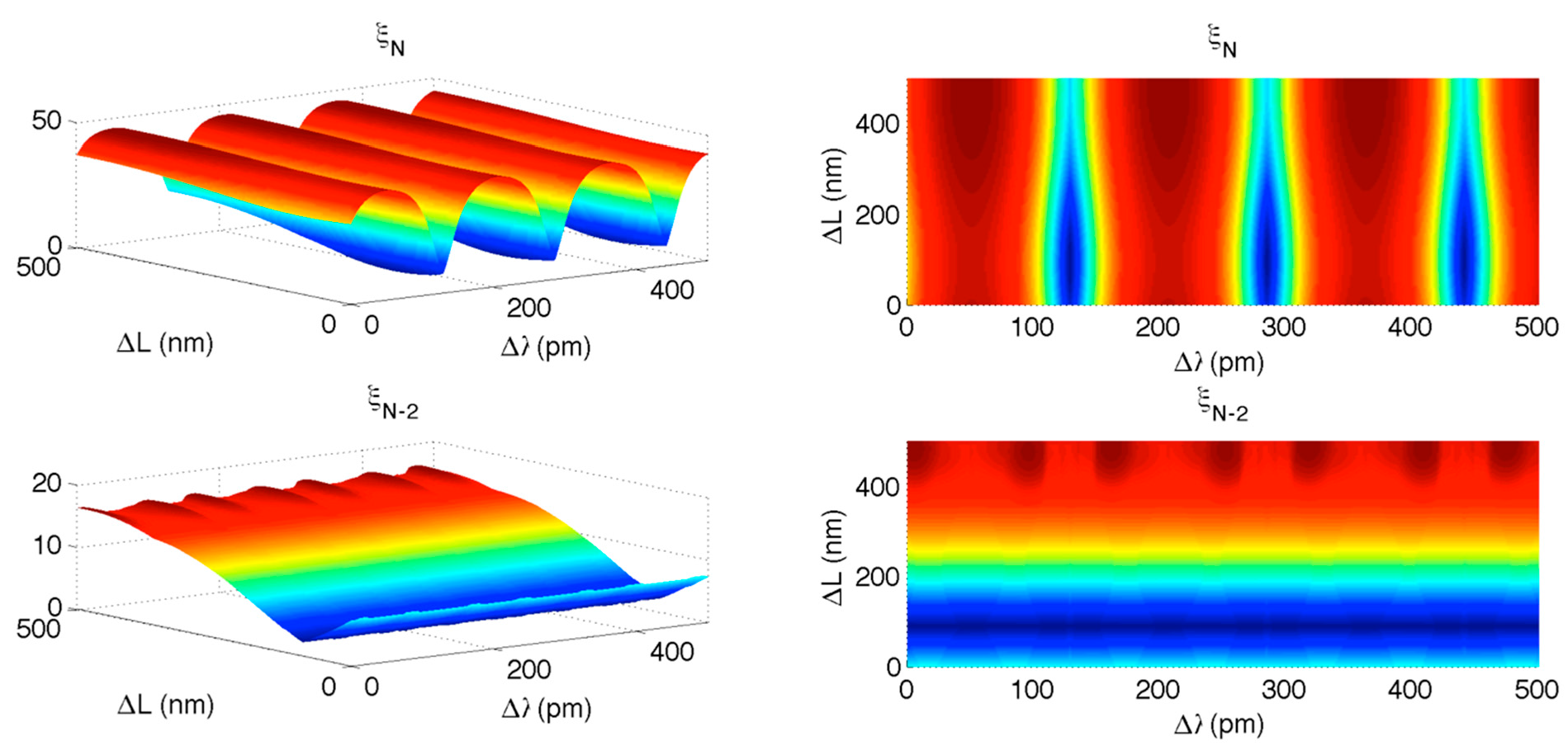
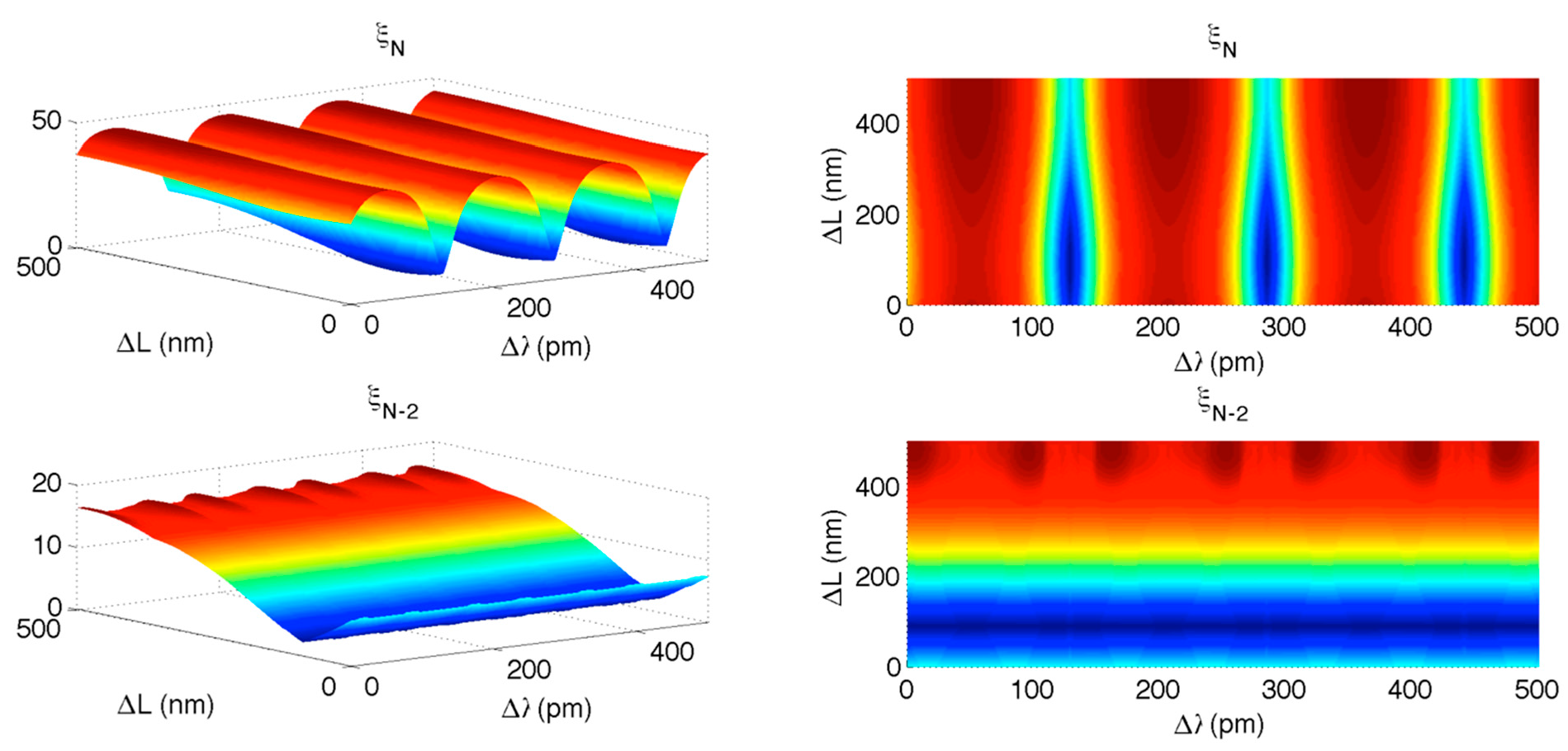
Figure 12 shows, in a 3D chart, the dependence of ξ
N and ξ
N−2 on Δ
λ and Δ
L. In first instance, it is possible to notice that ξ
N has an almost vertical plot similar to
Figure 4, while
ξN−2 is horizontally laid and exhibits a pattern similar to
Figure 8. After the preliminary estimate of Δλ and ΔL, the KLT can compute the residual variation: it is possible to estimate ΔL from ξ
N−2 chart, and then estimate Δλ from ξ
N as this procedure guarantees a better resilience to the cross-interference.
Figure 11.
KLT-SVD applied to the dual FBG/FPI sensor. The chart reports the eigenvalues ξ, when either the FBG is shifted by 75 pm, or the FPI cavity length is expanded by 25 nm, or both events occur. The chart reports the highest rank eigenvalues (48–51), significant for demodulation.
Figure 11.
KLT-SVD applied to the dual FBG/FPI sensor. The chart reports the eigenvalues ξ, when either the FBG is shifted by 75 pm, or the FPI cavity length is expanded by 25 nm, or both events occur. The chart reports the highest rank eigenvalues (48–51), significant for demodulation.
Figure 12.
KLT applied to long-range interrogation of FBG/FPI. The upper charts shows the high-rank eigenvalue ξN as a function of FBG wavelength shift Δλ and FPI cavity length expansion ΔL; the lower charts show the eigenvalue ξN−2 as a function of Δλ and ΔL. Left charts plot the full 3D view; right charts show the 2D top-view.
Figure 12.
KLT applied to long-range interrogation of FBG/FPI. The upper charts shows the high-rank eigenvalue ξN as a function of FBG wavelength shift Δλ and FPI cavity length expansion ΔL; the lower charts show the eigenvalue ξN−2 as a function of Δλ and ΔL. Left charts plot the full 3D view; right charts show the 2D top-view.
In a second scenario, the variations of Δλ and ΔL are confined to small values. This is common in biomedical applications [
57], and in this context the benefits of the accurate estimation through KLT are more consistent.
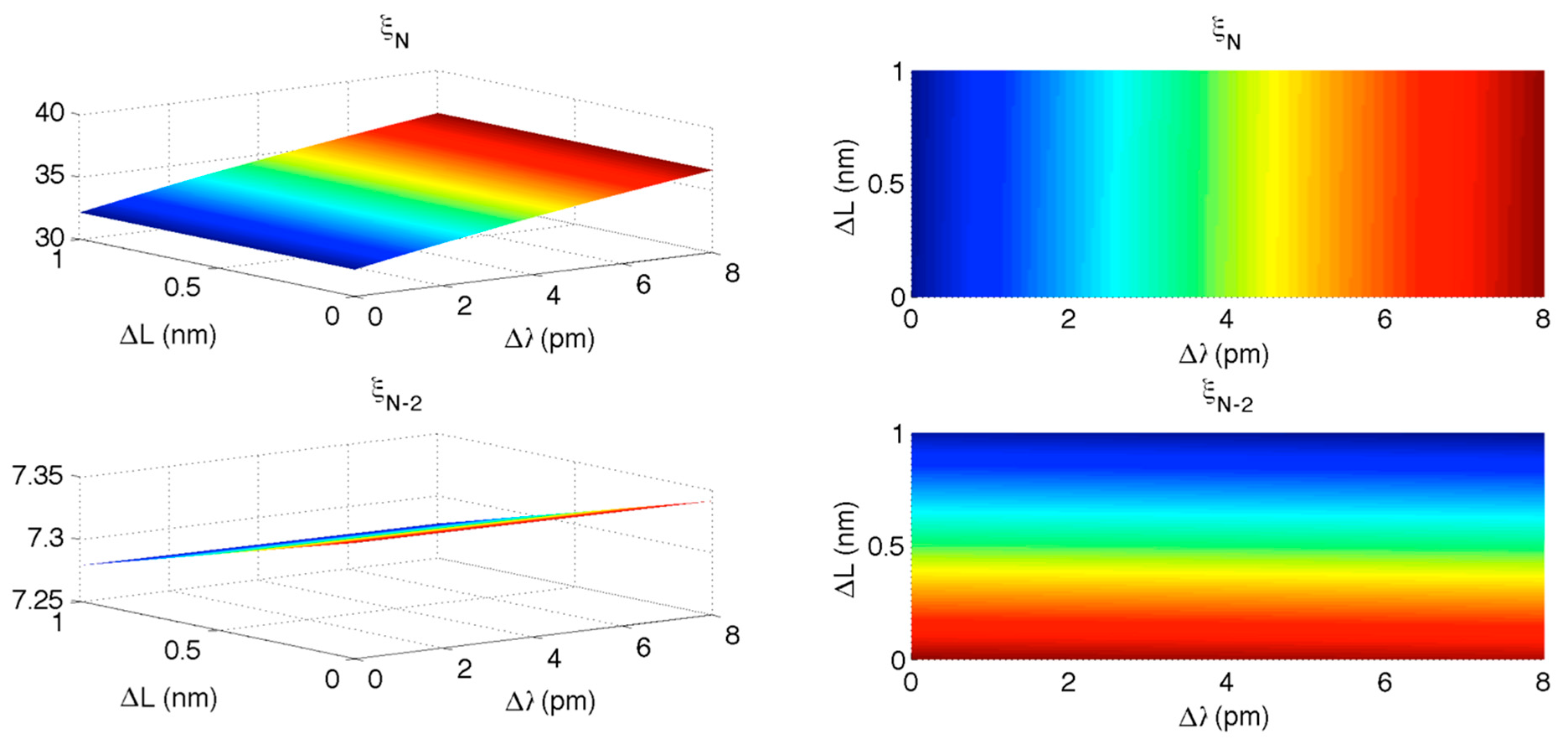
Figure 13 shows the KLT output as in
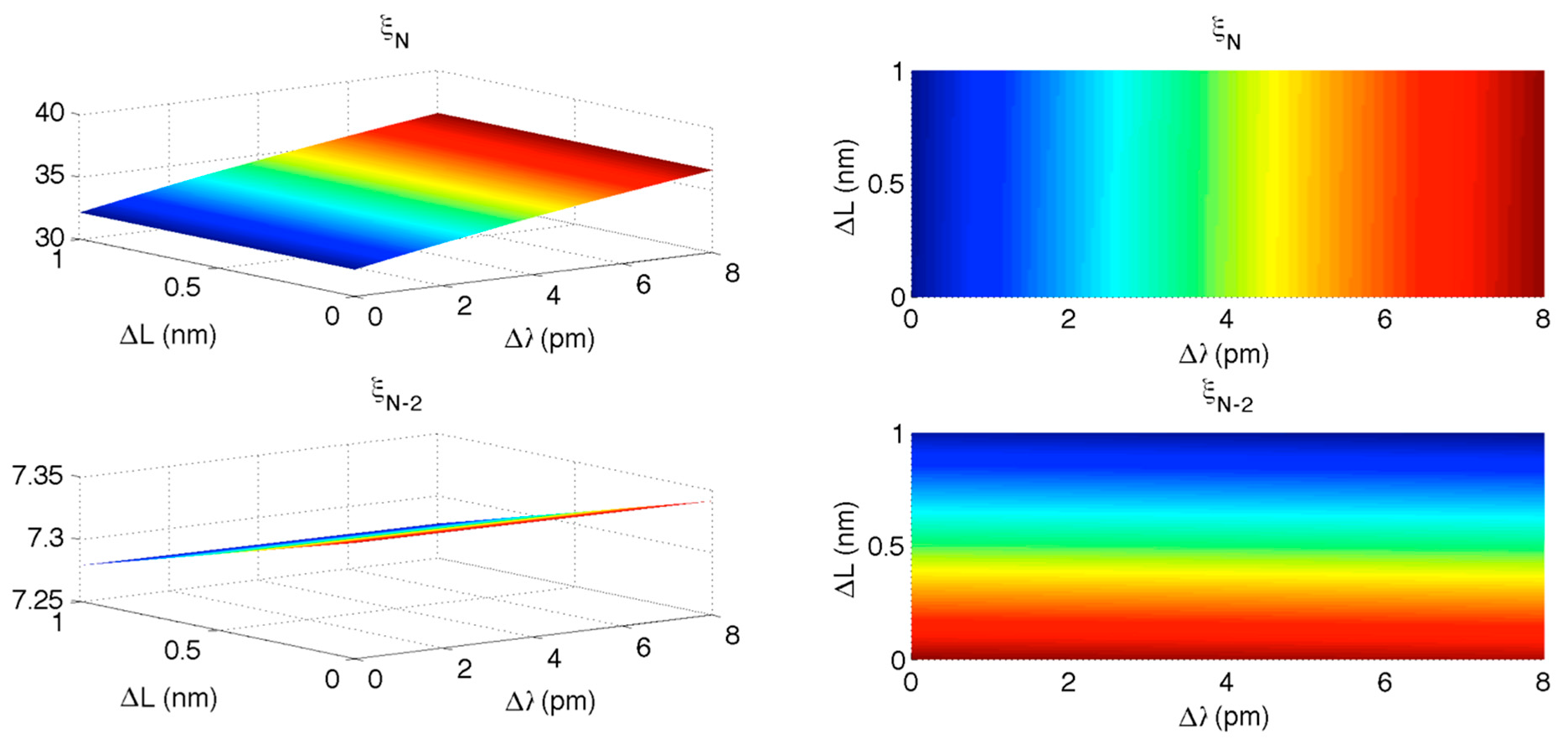
Figure 12, whereas the interrogation range has been shortened to 0–8 pm for Δλ and 0–1 nm for ΔL. In this case, it is possible to notice that both ξ
N and ξ
N−2 have a nearly planar shape, with limited cross-interference, due to the short range of interrogation. In absence of noise, the error on wavelength estimation Δλ due to variations of ΔL, on a short interrogation range, is estimated as 1.12 pm; the error on ΔL due to variations of Δλ is 0.66 pm. Such uncertainties are then combined with the noise-induced accuracy; for small values of SNR, accuracy is limited by SNR while for higher SNR values, accuracy is limited by Δλ − ΔL cross-interference.
Figure 13.
KLT applied to short-range interrogation of FBG/FPI. The upper charts shows the high-rank eigenvalue ξN as a function of FBG wavelength shift Δλ and FPI cavity length expansion ΔL; the lower charts show the eigenvalue ξN−2 as a function of Δλ and ΔL. Left charts plot the full 3D view; right charts show the 2D top-view.
Figure 13.
KLT applied to short-range interrogation of FBG/FPI. The upper charts shows the high-rank eigenvalue ξN as a function of FBG wavelength shift Δλ and FPI cavity length expansion ΔL; the lower charts show the eigenvalue ξN−2 as a function of Δλ and ΔL. Left charts plot the full 3D view; right charts show the 2D top-view.
Figure 13 demonstrates that the KLT, without any modification, can interrogate a dual FPI/FBG sensor returning accuracy comparable with the state of the art, and computational complexity comparable with 1 kHz operation, without duplicating the optical source as in [
29] or separating FPI and FBG spectra as in [
31,
32]. It is however possible, increasing the computational complexity, to obtain a neater separation between FBG and FPI spectra; such feature will be described in the next section.
5. Interrogation of a Plurality of FBG and FPI Sensors
When a plurality of sensors is encoded in the same spectral window, the demodulation can hardly be performed with classical techniques. On the other hand, the possibility to encode multi-parameter sensors in several active areas along a single fiber is a key feature for optical fiber sensors [
58]. Most commercial systems do not enable such features, limiting the interrogation to an array of FBGs, or a single FPI. Dual interrogation, when feasible, is severely limited in accuracy by the scarce possibility of separating the spectral contribution of each sensor to the overall spectrum.
The KLT demonstrates an exceptional capability of separating sensors spectra, encoding their energy into eigenvalues. It is possible then to exploit such principle and reverse the SVD, to facilitate the separation of each sensor. The principle of operation is to manipulate the string of eigenvalues, and consequently modifying the values of ξ by multiplying each eigenvalue
ξi for a new coefficient
hi:
By weighing the eigenvalues, the diagonal matrix
can be then converted in a new matrix
′ in Equation (5):
Then, working backwards from Equation (5) to Equation (3), a new spectrum is obtained:
where the IFFT is the inverse FFT.
Each coefficient 0 < hi ≤ 1 is a filter on its corresponding eigenvalue. Although it is not possible to set any coefficient to zero, to avoid the determinant of to be null, by setting a sufficiently low value of hi it is possible to “turn off” the i-th eigenvalue, and as a consequence the modified spectrum S′[λ] will not include its contribution. Conversely, by setting hi = 1, the i-th eigenvalue is “turned on”. The coefficient string h = [h1, …, hN] is then a filter on the eigenvalues, that allows turning on the eigenvalues relevant to a specific type of sensor and turning off the other contributions. In the following, the i-th eigenvalue ξi is turned on by setting hi = 1 and is turned off by setting hi = 10−8.
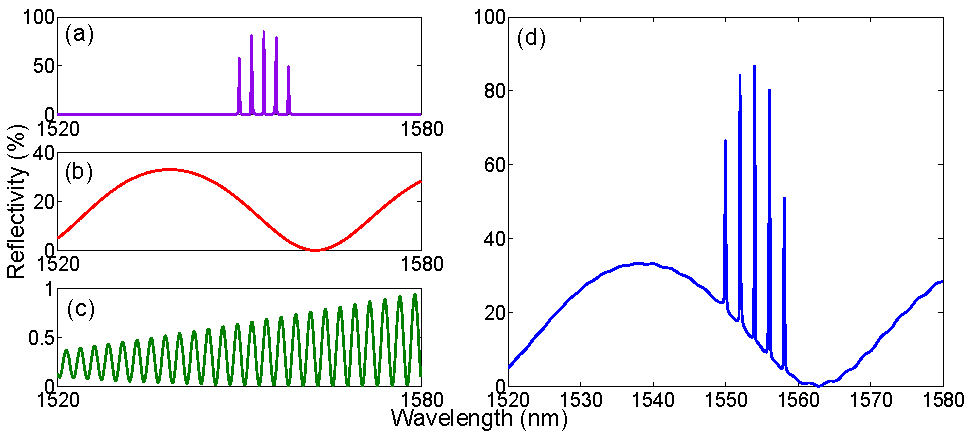
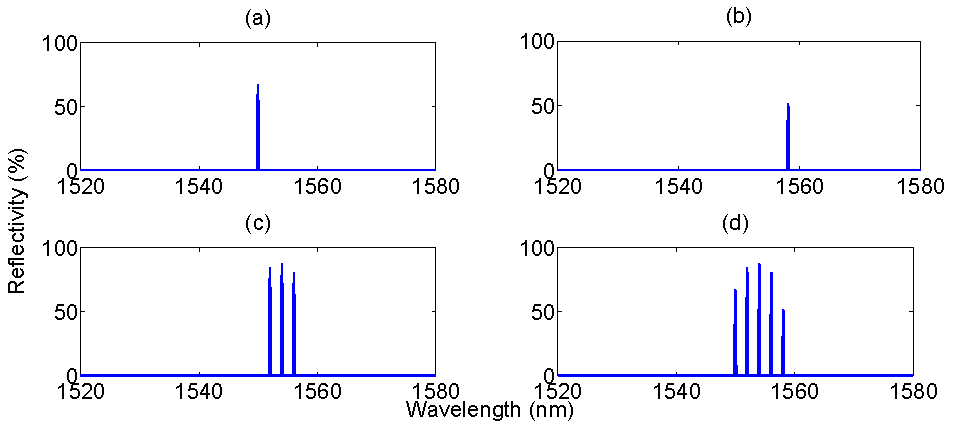
In order to demonstrate how the eigenvalue filtering operates,
Figure 14 presents a relevant benchmark, consisting of the combination of seven sensors. The first batch is an array five FBGs, all having
g = 1.6 (85% reflectivity), and Bragg wavelength equally spaced by 2 nm starting from 1550 nm; in
Figure 14a it is possible to show that, despite each FBG has the same spectral profile, due to the coarse sampling the peak value appears to be different for each FBG. The second sensor is an EFPI, having peak reflectivity 33% and Fabry-Perot cavity length 25 μm; this sensor is a representation of an inline intrinsic FPI (IFPI) sensor fabricated on a splicer with highly reflective mirrors [
51]. The last sensor is a lowly reflective EFPI (0.95%), which can simulate pressure sensors based on all-glass structure and low-reflectivity mirrors [
57]. The spectrum is acquired on bandwidth of 60 nm with the usual 156 pm sampling; the eigenvalue string length is then
N = 385.
By filtering the eigenvalues following Equations (7)–(10) it is possible to retrieve the contribution of each sensor in the spectrum. In
Figure 15, the first part is retrieving the FBGs. It is possible to show that all the five high-rank eigenvalues correspond to the five FBGs that constitute the grating array. In particular, the
N-th eigenvalue corresponds to the FBG with the highest peak value after sampling,
i.e., the third FBG in
Figure 14a centered at 1554 nm. The (
N − 1)-th eigenvalue corresponds to the second FBG (1554 nm), and so until the (
N − 4)-th eigenvalue that corresponds to the rightmost FBG (1558 nm).
Figure 14.
Spectrum of a multiple-FBG/FPI sensing system, used as benchmark for evaluation of the KLT eigenvalue filtering. The system is the combination of three sensing units: (a) an array of FBGs, equally spaced; (b) a highly reflective FPI with short cavity length; (c) a low-finesse FPI with long cavity length. The three spectra are combined, with additive Gaussian noise, to obtain the overall spectrum (d).
Figure 14.
Spectrum of a multiple-FBG/FPI sensing system, used as benchmark for evaluation of the KLT eigenvalue filtering. The system is the combination of three sensing units: (a) an array of FBGs, equally spaced; (b) a highly reflective FPI with short cavity length; (c) a low-finesse FPI with long cavity length. The three spectra are combined, with additive Gaussian noise, to obtain the overall spectrum (d).
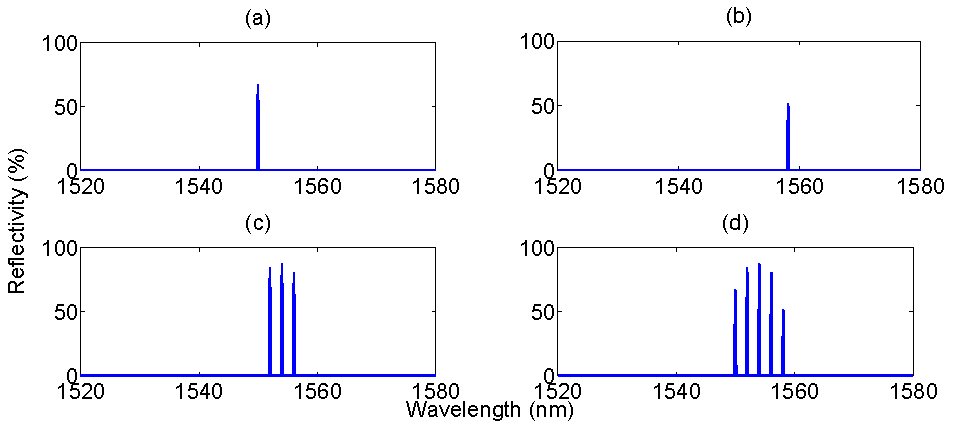
Figure 15 shows some examples of isolating FBGs from the remainder of the spectrum. In first instance, by turning on ξ
N−3, and turning off all other eigenvalues, it is possible to retrieve the leftmost FBG centered at 1550 nm. Conversely, the rightmost FBG can be isolated by turning on ξ
N−4. It is possible to notice that no trace of any other FBG, or any FPI sensors, appears in the spectrum resulting after the eigenvalue filtering. By turning on more than one eigenvalue, it is possible to isolate more than one FBG. In
Figure 15c the three highest rank eigenvalues are turned on: the resulting spectrum shows all the three middle FBGs composing the array, centered at 1552 nm, 1554 nm, and 1556 nm. In
Figure 15d all the five high-rank eigenvalues, and the resulting spectrum, contain all the array of
Figure 14a, still showing no trace of any FPI spectra. The computation time for one estimation of eigenvalues, filtering, and IFFT, is 101 ms.
Figure 15.
The eigenvalue filtering allows retrieving the FBG profile from the combined spectrum. From the original spectrum in
Figure 14d, by means of eigenvalue filtering in Equations (7)–(10), the spectrum of one or multiple FBGs is retrieved. The chart shows four reconstructed spectra, obtained turning on one or more eigenvalues within (
N − 4) and
N and turning on all the other ones. The active eigenvalues are: (
a) ξ
N−3; (
b) ξ
N−4; (
c) ξ
N, ξ
N−1, and ξ
N−2; (
d) all eigenvalues from ξ
N−4 to ξ
N.
Figure 15.
The eigenvalue filtering allows retrieving the FBG profile from the combined spectrum. From the original spectrum in
Figure 14d, by means of eigenvalue filtering in Equations (7)–(10), the spectrum of one or multiple FBGs is retrieved. The chart shows four reconstructed spectra, obtained turning on one or more eigenvalues within (
N − 4) and
N and turning on all the other ones. The active eigenvalues are: (
a) ξ
N−3; (
b) ξ
N−4; (
c) ξ
N, ξ
N−1, and ξ
N−2; (
d) all eigenvalues from ξ
N−4 to ξ
N.
By filtering out the eigenvalues corresponding to the FBG peaks, the remainder of the spectrum is encoded in the remaining low-rank eigenvalues. In terms of spectral energy contribution, the IFPI of
Figure 14b is the next term that can be extracted. Empirically, this is performed by turning on the eigenvalues ranging from ξ
N−11 to ξ
N−7, in order to extract those eigenvalues in which the contribution of the other spectral components is lower. Finally, by turning on some low-rank eigenvalues, specifically ξ
N−240 to ξ
N−224 it is possible to partially recover the spectrum of the EFPI in
Figure 14c.
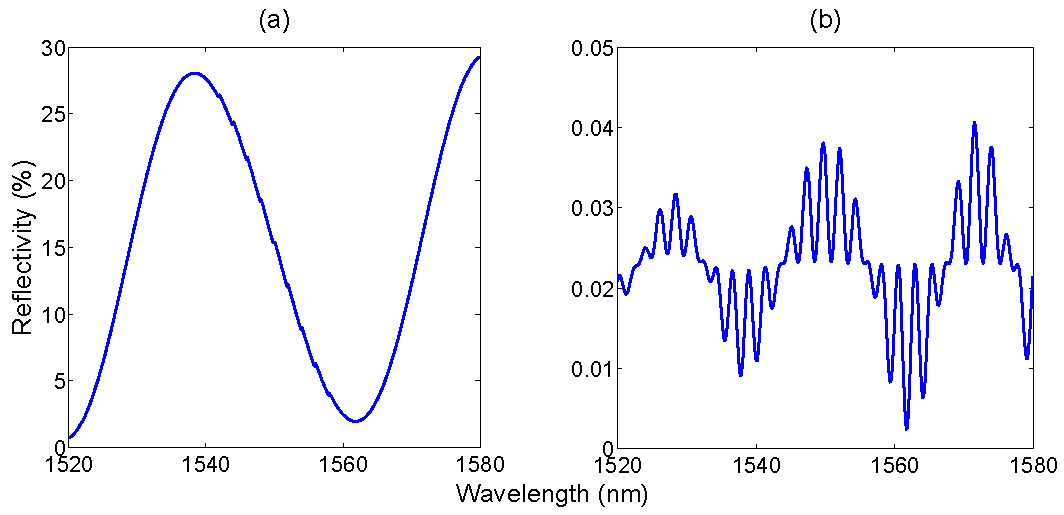
The result of this filtering operation is shown in
Figure 16. The second-rank eigenvalues confine most of the highly reflective FPI sensor. By shutting down all components from ξ
1 to ξ
N−12 it is possible to mitigate the effect of noise, the other FPI sensor, and side lobes of FBGs; conversely by removing ξ
N−6 to ξ
N it is possible to remove the effect of the FBG peaks. The result is that the spectrum in
Figure 16a maintains most of the profile of
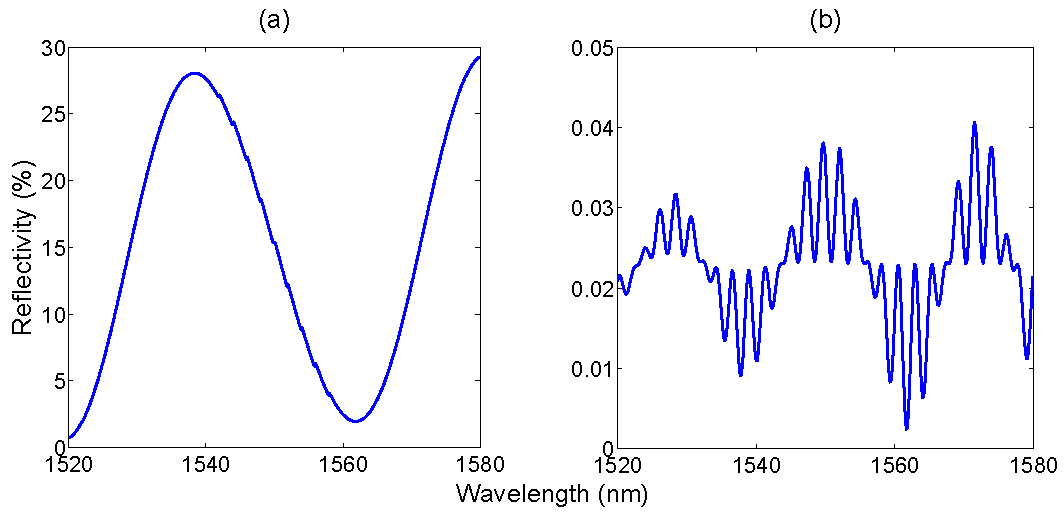
Figure 14b, with a similar envelope deprived from the FBG array; the peak reflectivity value is lower (27.6%), as a residual part of the energy has been filtered out. In
Figure 16b, an empirical reconstruction of the low-reflectivity EFPI has been performed, by switching on ξ
N−240 to ξ
N−224. In this case, the spectrum results in a different pattern, with a lower reflectivity as part of the energy has been filtered out; however, despite the different background level, the filtered signal maintains the original periodicity, which is a substantial outcome considering that in the overall spectrum, the contribution of this EFPI is barely visible and corrupted by noise. The spectrum in
Figure 16b is suitable for estimation of cavity length.
Figure 16.
Eigenvalue filtering to retrieve the FPI sensors spectra. (a) Spectrum obtained by turning on ξN−11 to ξN−7; (b) spectrum obtained by turning on ξN−240 to ξN−224.
Figure 16.
Eigenvalue filtering to retrieve the FPI sensors spectra. (a) Spectrum obtained by turning on ξN−11 to ξN−7; (b) spectrum obtained by turning on ξN−240 to ξN−224.
The isolation of each spectral component from the overall spectrum needs to be optimized by a proper choice of the coefficients
hi, and is dependent on the energy associated to each spectral component resulting from the FFT in Equation (3). Individual FBGs, by having a peak spectral profile, or FBG arrays (particularly if equally spaced) are usually confined in the highest rank eigenvalues, and therefore can be well isolated from the background. Low-finesse FPI sensors represent the opposite pattern, as they tend to spread most of their energy in a plurality of eigenvalues. The results obtained in
Figure 15 and
Figure 16 are obtained with an empirical selection of
hi coefficients, which is suited for the spectrum of
Figure 14d; for an arbitrary spectrum, the
hi string needs to be determined. However, due to the nature of the KLT, in a complex spectrum that involves a plurality of sensing elements, FBGs usually to occupy the high-rank eigenvalues, while broadband elements, which spread their energy over a wider bandwidth, are confined to lower-rank eigenvalues.
In this framework, the use of a KLT algorithm can change the framework of lab-in-a-fiber systems based on WDM [
58], particularly using a high density of sensors. The typical principle of operation of such systems relies on wavelength separation, by assigning a different wavelength of operation to each sensor. This approach shows vulnerability when broadband sensors such as FPIs, LPGs, or chirped FBGs coexist on the same bandwidth. The KLT, instead, is more capable to disambiguate sensors having different spectral energy, as each of them is encoded in a different portion of the eigenvalue string. The discussion carried out in this section provides a first step in such direction. The future research efforts will focus on optimizing eigenvalue filtering for each type of sensing system; and additional features can be enabled by manipulating the matrix
, by applying a translation matrix in order to improve the isolation of a set of bases from the overall matrix
. After isolating each sensor spectrum, it is possible to reapply the KLT as in
Section 3 to accurately track wavelength shifts.
7. Conclusions
The KLT is a powerful algorithm, which applies for detection of signals corrupted by noise, as well as for coarsely sampled signals. It finds excellent application for optical fiber sensors, for the accurate detection of sensors encoded on the same spectral window. Several typologies of sensors and sensing networks can be detected with the KLT, including FBG, and all grating-based sensors, FPI, SPR and other sensors based on absorption. The core of the KLT principle is determining the main eigenvalue that composes the spectral encoding, and thus demodulate the sensor.
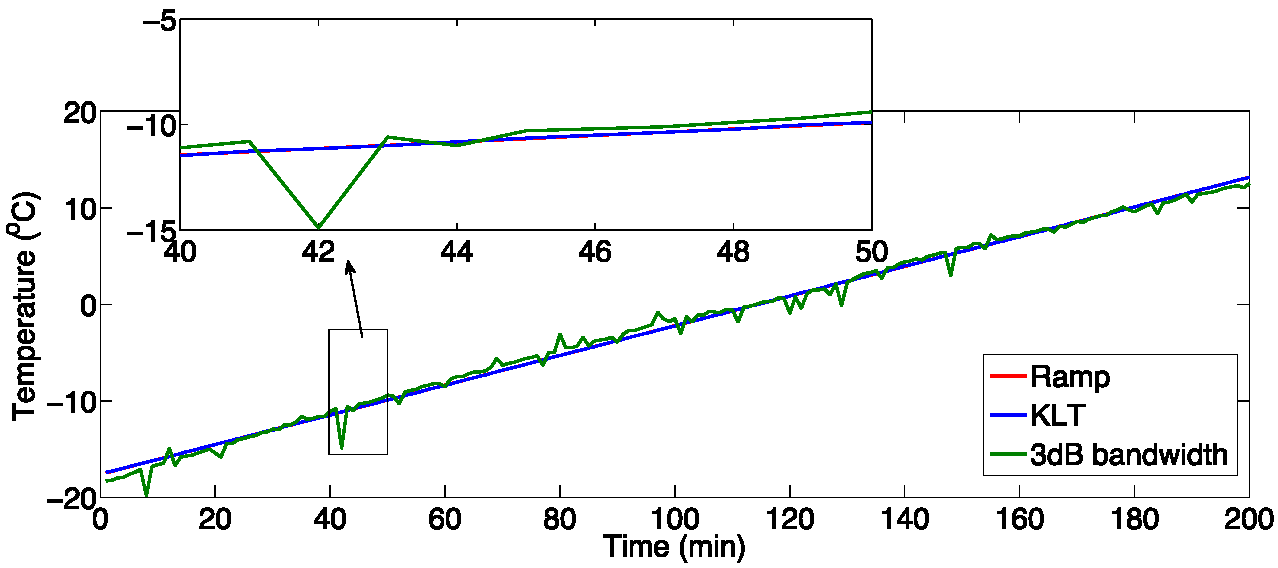
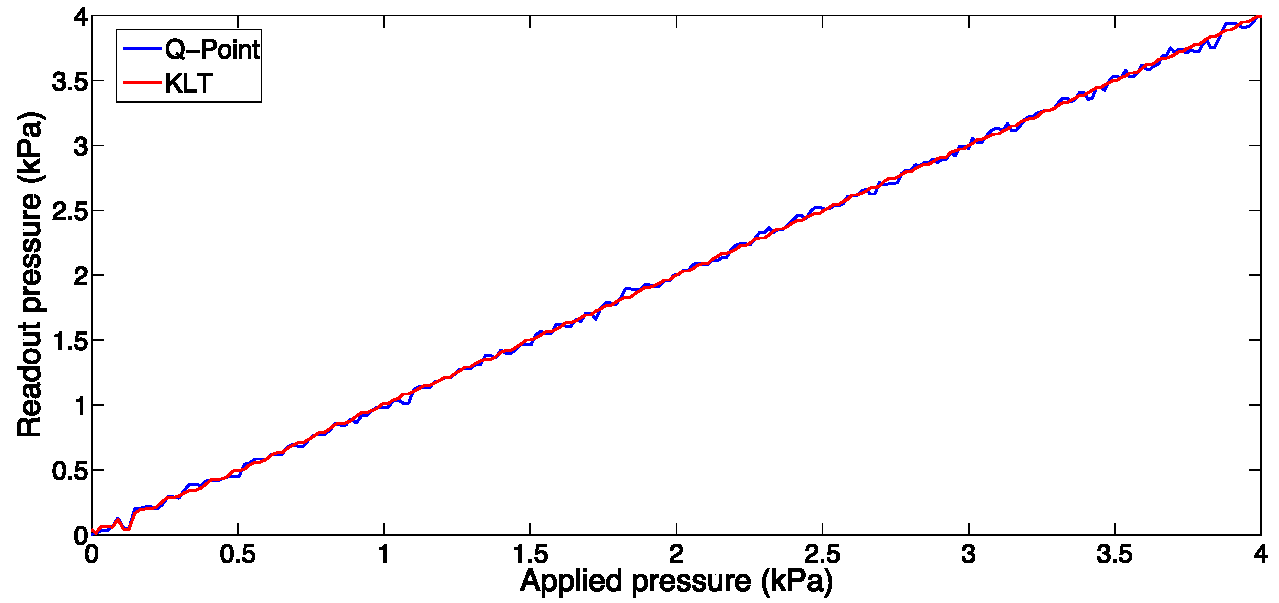
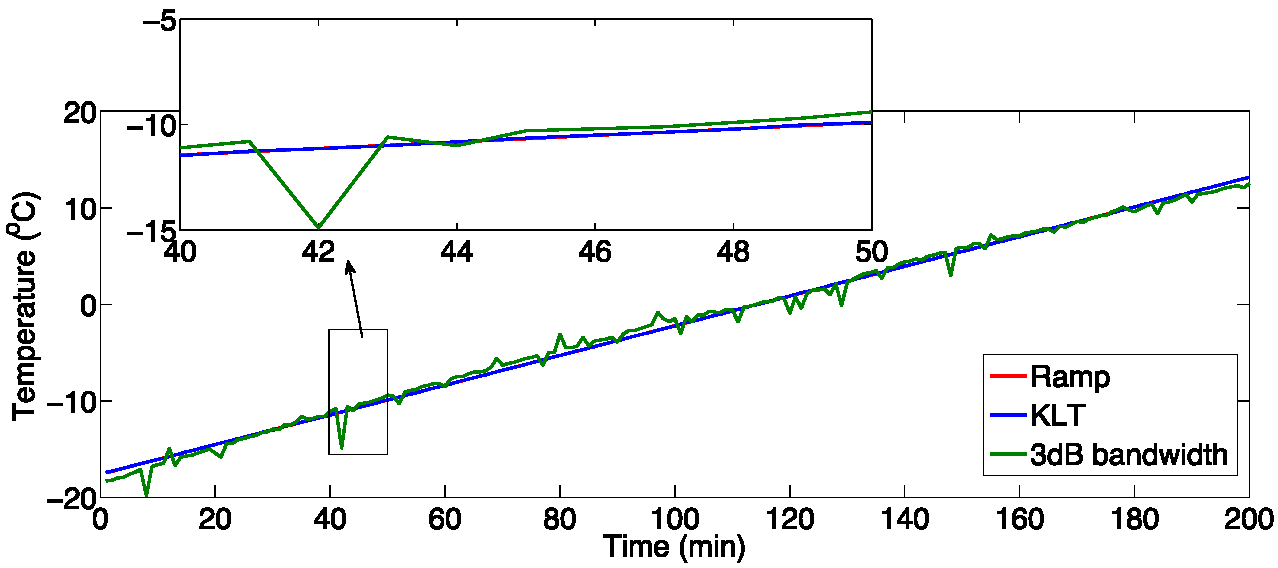
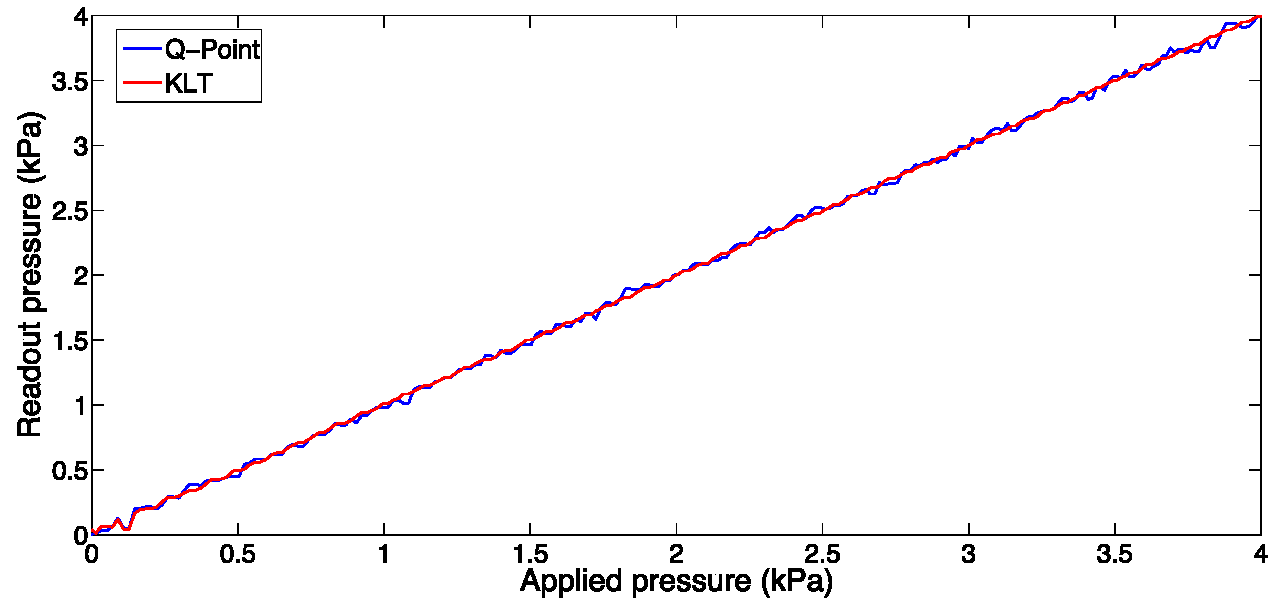
The KLT demonstrates a first application in the interrogation of an individual sensor; in this framework, the value proposition of the KLT over other standard methods is that it achieves excellent accuracy, despite a coarse wavelength sampling typical of fiber-optic interrogators based on spectrometers. As a benchmark, FBG and FPI sensors have been simulated, and the KLT demonstrates superior accuracy than the state of the art, overcoming by 10–100 times the limitations of other techniques that struggle with coarse sampling. An experimental validation has been carried out, confirming the performance increase due to the KLT.
A second application that has been outlined is the dual decoding of FBG/FPI sensors: in this case, while the main eigenvalue is substantially dependent on the FBG, the lower rank eigenvalues are approximately dependent on the FPI only. This allows dual demodulation of multi-sensors, with a fast algorithm that does not require duplicating the optical source or the interrogation range.
A final extension of the KLT requires the manipulation of eigenvalues. This principle allows removing spectral components from the overall optical spectrum, thus extracting the spectrum of an individual spectrum and isolating it from the overall spectrum. The KLT shows the premises to operate with dense lab-in-a-fiber sensors, where a plurality of sensors coexist on the same bandwidth and detection is limited by cross-interference. A preliminary demonstration has been carried out, confirming the principle of operation and leaving the margin for potential improvements in wavelength-encoded sensing systems.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}