
Modified Particle Filtering Algorithm for Single Acoustic Vector Sensor DOA Tracking

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. State Space Model
2.1. The Establishment of the State Equation
2.2. The Establishment of the Observation Model
3. Modified Particle Filtering Tracking Algorithm
3.1. Particle Filtering Algorithm
3.2. Modified Particle Filtering Algorithm
3.3. DOA Tracking and Estimation Algorithm Based on Modified Particle Filtering
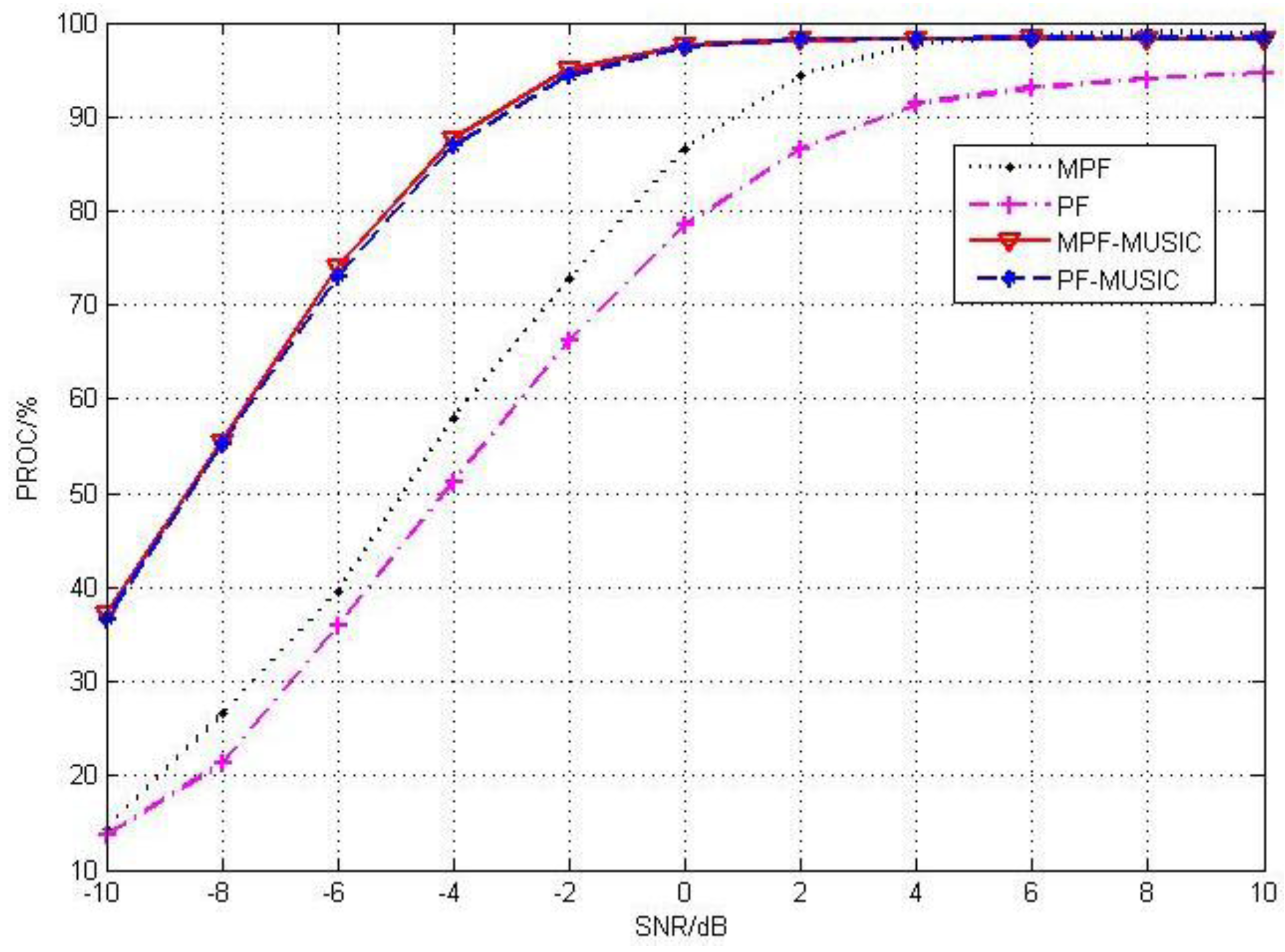
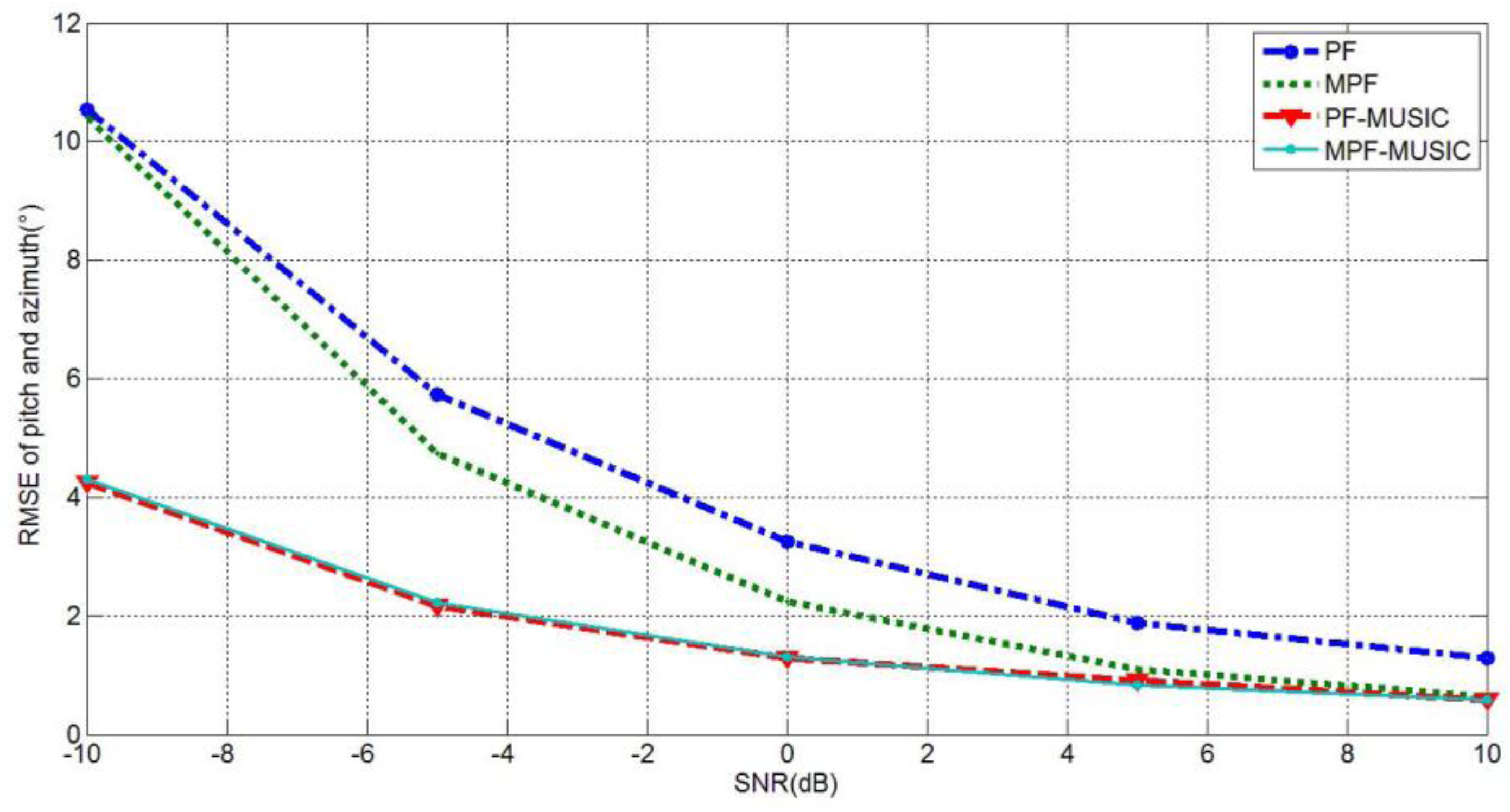
4. Simulation and Analysis
Single Array Element Experiment

5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wu, Y.I.; Wong, K.T.; Lau, S.K. The Acoustic Vector-Sensor’s Near-Field Array-Manifold. IEEE Trans. Signal Process. 2010, 58, 3946–3951. [Google Scholar] [CrossRef]
- Yang, S.; Wong, K.T. Three-Dimensional Localization of a Near-Field Emitter of Unknown Spectrum, using an Acoustic Vector Sensor Corrupted by Additive Noise of Unknown Spectrum. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1035–1041. [Google Scholar]
- Wong, K.T. Acoustic Vector-Sensor FFH “Blind” Beamforming & Geolocation. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 444–448. [Google Scholar]
- Ping, K.T.; Wong, K.T.; Song, Y. An Hybrid Cramér-Rao Bound in Closed Form for Direction-of-Arrival Estimation by an “Acoustic Vector Sensor” with Gain-Phase Uncertainties. IEEE Trans. Signal Process. 2014, 62, 2504–2516. [Google Scholar]
- Tam, P.K.; Wong, K.T. Cramér-Rao Bounds for Direction Finding by an Acoustic Vector Sensor under Nonideal Gain-Phase Responses, Noncollocation, or Nonorthogonal Orientation. IEEE Sens. J. 2009, 9, 969–982. [Google Scholar] [CrossRef]
- Yang, S.; Wong, K.T. Azimuth-elevation direction finding using a microphone and three orthogonal velocity sensors as a non-collocated subarray. J. Acoust. Soc. Am. 2013, 133, 1987–1995. [Google Scholar]
- Yang, S.; Wong, K.T. Acoustic direction finding using a spatially spread tri-axial velocity sensor. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 834–842. [Google Scholar]
- Nehorai, A.; Paldi, E. Acoustic vector sensor array processing. IEEE Trans. Signal Process. 1994, 42, 2481–2491. [Google Scholar] [CrossRef]
- Hawkes, M.; Nehorai, A. Acoustic vector-sensor beamforming and Capon direction estimation. IEEE Trans. Signal Process. 1998, 46, 2291–2304. [Google Scholar] [CrossRef]
- Tichavsky, P.; Wong, K.T.; Zoltowski, M.D. Near-field/far-field azimuth and elevation angle estimation using a single vector hydrophone. IEEE Trans. Signal Process. 2001, 49, 2498–2510. [Google Scholar] [CrossRef]
- Chen, G.C.; Hodgkiss, W.S. VLF source localization with a freely drifting acoustic sensor array. IEEE J. Ocean. Eng. 1993, 18, 209–223. [Google Scholar] [CrossRef]
- Ratnarajah, T. An H∞ approach to multi-source tracking. In Proceedings of the 1998 IEEE International Conference on Acoustics, Speech, and Signal Processing, Seattle, WA, USA, 15 May 1998; pp. 2205–2208.
- Liu, X.; Xiang, J.; Zhou, Y. Passive tracking and size estimation of volume target based on acoustic vector intensity. Chin. J. Acoust. 2001, 20, 225–238. [Google Scholar]
- Awad, M.K.; Wong, K.T. Recursive Least-Squares Source Tracking using One Acoustic Vector Sensor. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 3073–3083. [Google Scholar] [CrossRef]
- Awad, M.K.; Wong, K.T. Errata: Recursive least-squares source tracking using one acoustic vector sensor. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 688–692. [Google Scholar] [CrossRef]
- Zhong, X.; Premkumar, A.B. Particle Filtering Approaches for Multiple Acoustic Source Detection and 2-D Direction of Arrival Estimation Using a Single Acoustic Vector Sensor. IEEE Trans. Signal Process. 2012, 60, 4719–4733. [Google Scholar] [CrossRef]
- Zhong, X.H.; Premkumar, A.B.; Madhukun, A.S. Particle filtering and posterior Cramér-Rao Bound for 2-D direction of arrival tracking using an acoustic vector sensor. IEEE Sens. J. 2012, 12, 363–377. [Google Scholar] [CrossRef]
- Zhong, X.H.; Hari, V.N.; Premkumar, A.B. Particle filtering with enhanced likelihood model for underwater acoustic source DOA tracking. In Proceedings of the Oceans’11 IEEE Santander Conference, Santander, Spain, 6–9 June 2011; pp. 1–6.
- Zhong, X.; Premkumar, A.B.; Wang, W. Direction of arrival tracking of an underwater acoustic source using particle filtering: Real data experiments. In Proceedings of the IEEE Tencon Spring Conference, Xi’an, China, 22–25 October 2013; pp. 420–424.
- Zhong, X.H.; Premkumar, A.B.; Madhukumar, A.S. Direction of arrival tracking in impulsive noise using particle filtering with fractional lower order moment likelihood. In Proceedings of the International Conference on Information, Communications and Signal Processing, Singapore, 13–16 December 2011; pp. 1–5.
- Gordon, N.; Salmond, D.; Smith, A.F. Novel approach to nonlinear/non-Gaussian Bayesian state estimation. Proc. Inst. Elect. Eng. 1993, 140, 107–113. [Google Scholar] [CrossRef]
- Liu, J.S.; Chen, R. Sequential Monte Carlo Methods for Dynamic Systems. J. Am. Stat. Assoc. 1998, 93, 1032–1044. [Google Scholar] [CrossRef]
- Arulampalam, M.; Maskell, S.; Gordon, N.; Clapp, T. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef]
- Ristic, B.; Arulampalam, S.; Gordon, N. Beyond the Kalman Filter: Particle Filters for Tracking Applications; Artech House: London, UK, 2004. [Google Scholar]
- Wiese, T.; Claussen, H.; Rosca, J. Particle filter based DOA estimation for multiple source tracking (MUST). In Proceedings of the 11th Asilomar Conference on Circuits Systems & Computers, California, CA, USA, 6–9 November 2011; pp. 624–628.
- Djurić, P.M.; Venula, M.; Bugallo, M.F. Target Tracking by Particle Filtering in Binary Sensor Networks. IEEE Trans. Signal Process. 2008, 56, 2229–2238. [Google Scholar] [CrossRef]
- Weber, R.J.; Huang, Y.; Weber, R.J. Analysis for Capon and MUSIC DOA estimation algorithms. In Proceedings of the IEEE Antennas and Propagation Society International Symposium, Cgarkeston, SC, USA, 1–5 June 2009; pp. 1–4.
- Wong, K.T.; Zoltowski, M.D. Self-initiating MUSIC-based direction finding in underwater acoustic particle velocity-field beamspace. IEEE J. Ocean. Eng. 2000, 25, 262–273. [Google Scholar] [CrossRef]
- Wong, K.T.; Zoltowski, M.D. Root-MUSIC-based azimuth-elevation angle-of-arrival estimation with uniformly spaced but arbitrarily oriented velocity hydrophones. IEEE Trans. Signal Process. 1999, 47, 3250–3260. [Google Scholar] [CrossRef]
- Zoltowski, M.D; Wong, K.T. Closed-form eigenstructure-based direction finding using arbitrary but identical subarrays on a sparse uniform Cartesian array grid. IEEE Trans. Signal Process 2000, 48, 2205–2210. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Sun, H.; Jiang, L.; Shi, Y.; Wu, Y. Modified Particle Filtering Algorithm for Single Acoustic Vector Sensor DOA Tracking. Sensors 2015, 15, 26198-26211. https://doi.org/10.3390/s151026198
Li X, Sun H, Jiang L, Shi Y, Wu Y. Modified Particle Filtering Algorithm for Single Acoustic Vector Sensor DOA Tracking. Sensors. 2015; 15(10):26198-26211. https://doi.org/10.3390/s151026198
Chicago/Turabian StyleLi, Xinbo, Haixin Sun, Liangxu Jiang, Yaowu Shi, and Yue Wu. 2015. "Modified Particle Filtering Algorithm for Single Acoustic Vector Sensor DOA Tracking" Sensors 15, no. 10: 26198-26211. https://doi.org/10.3390/s151026198