
A Low-Cost Energy-Efficient Cableless Geophone Unit for Passive Surface Wave Surveys

Abstract
:1. Introduction
2. Development of the Low-Cost Energy-Efficient Geophone Unit
2.1. Sensor Development


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Value/Range | |
|---|---|---|
| Natural frequency (Hz) | 2% ± 10% | |
| Sensitivity (V/cm/s) | 2% ± 10% | |
| Coil resistance (Ω) | 6040% ± 5% | |
| Open circuit damping | 0.7% ± 10% | |
| Harmonic distortion | ≤0.2 | |
| Insulation resistance (MΩ) | ≥20 | |
| Maximum coil travel (mm) | 3 | |
| Inertial mass weight (g) | 60 | |
| Operation temperature (°C) | −25~+55 | |
| Weight (g) | 250 | |
| Size (mm) | Diameter | 38.5 |
| Height | 47 | |

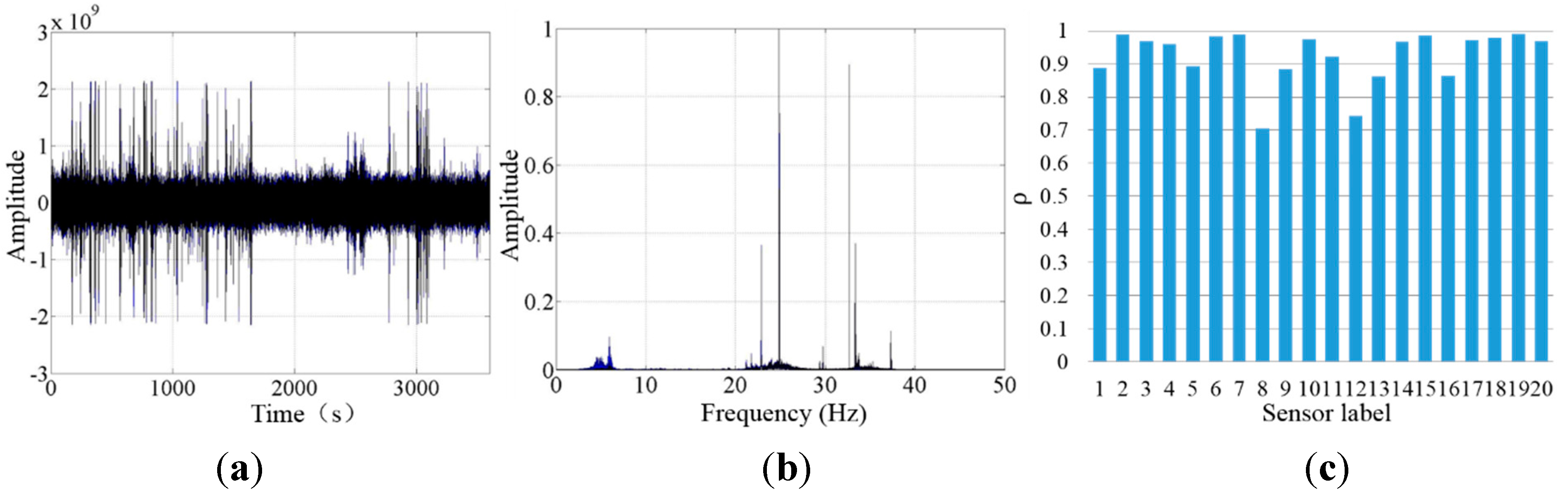
2.2. Laboratory Calibration

3. Field Tests for Validation and Demonstration
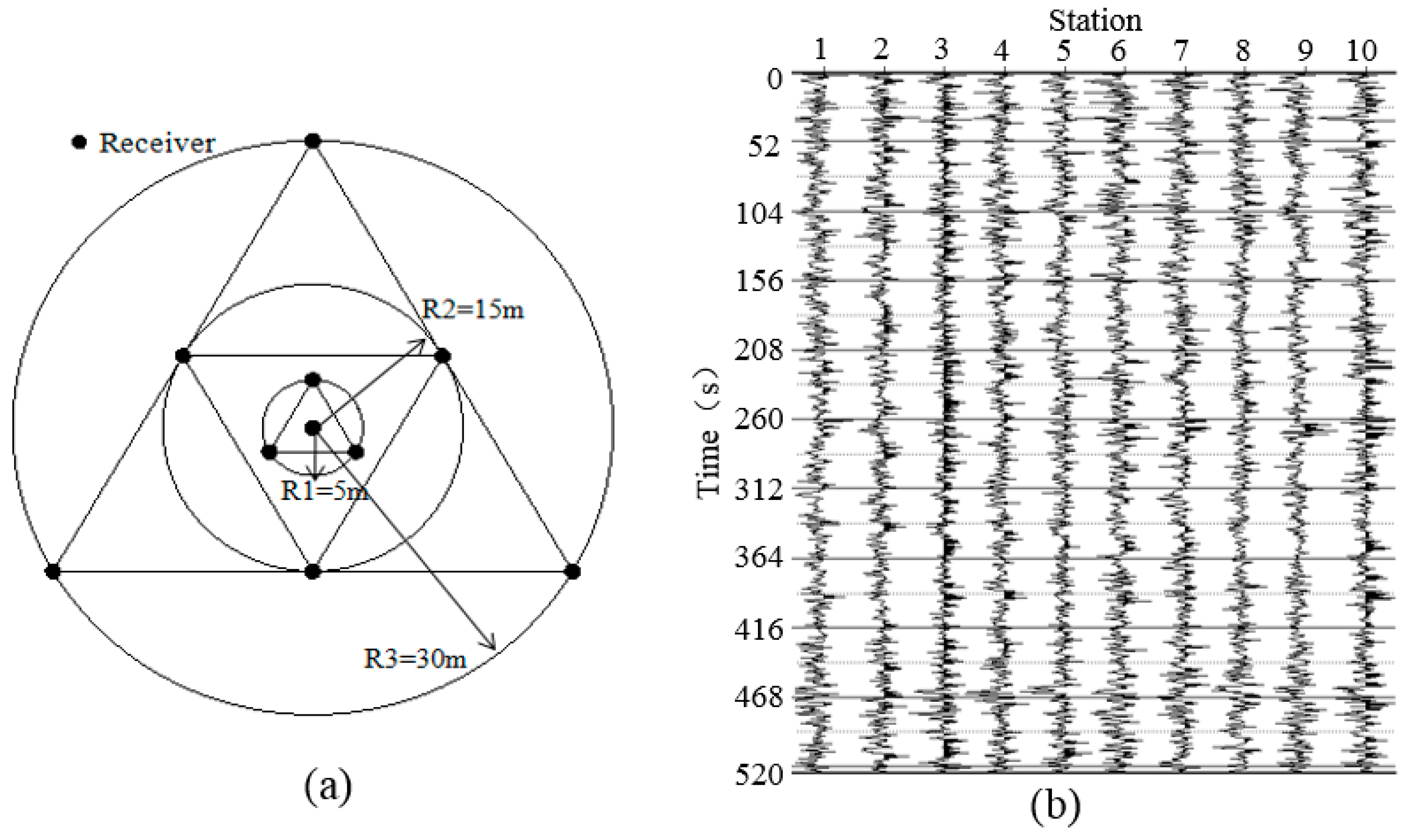
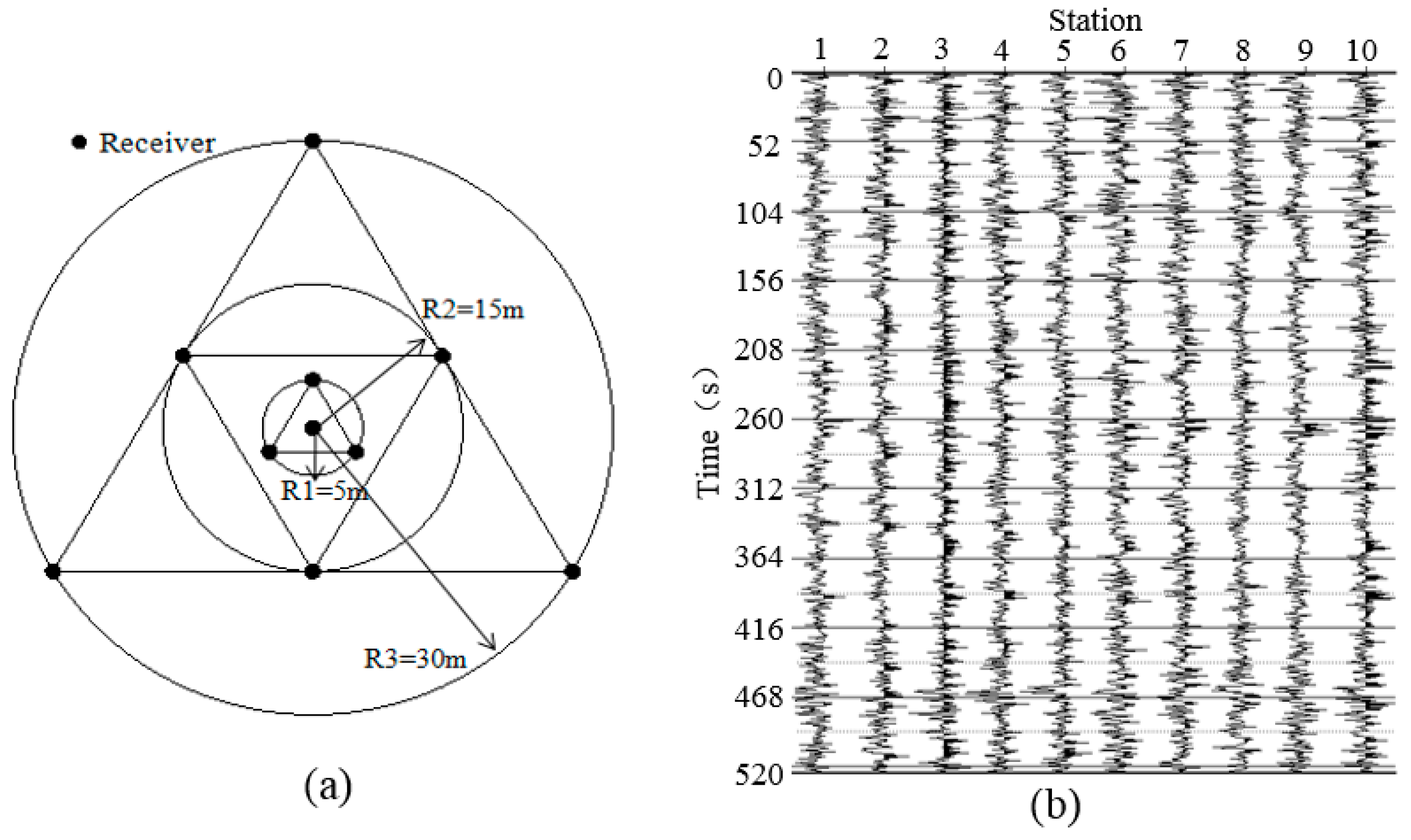
3.1. Array-Based Passive Surface Wave Survey Method
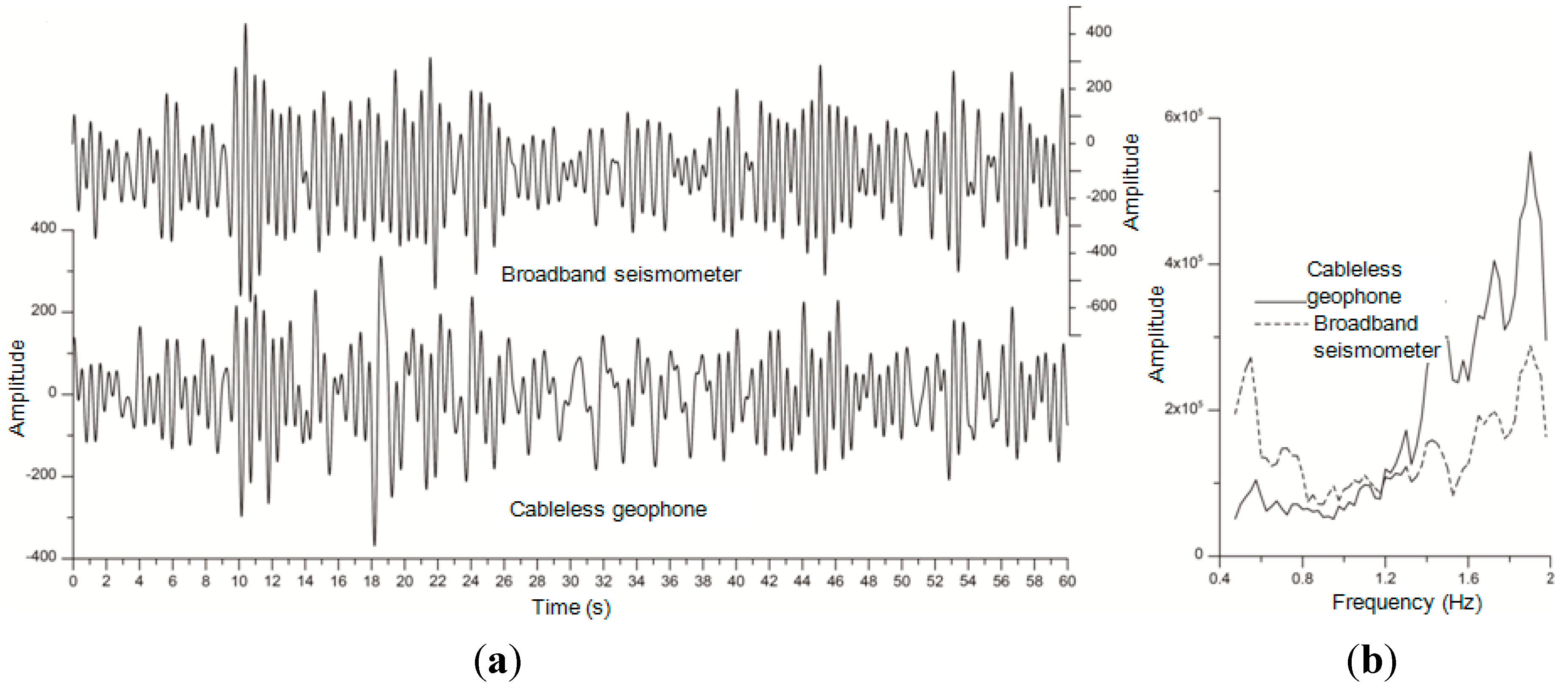
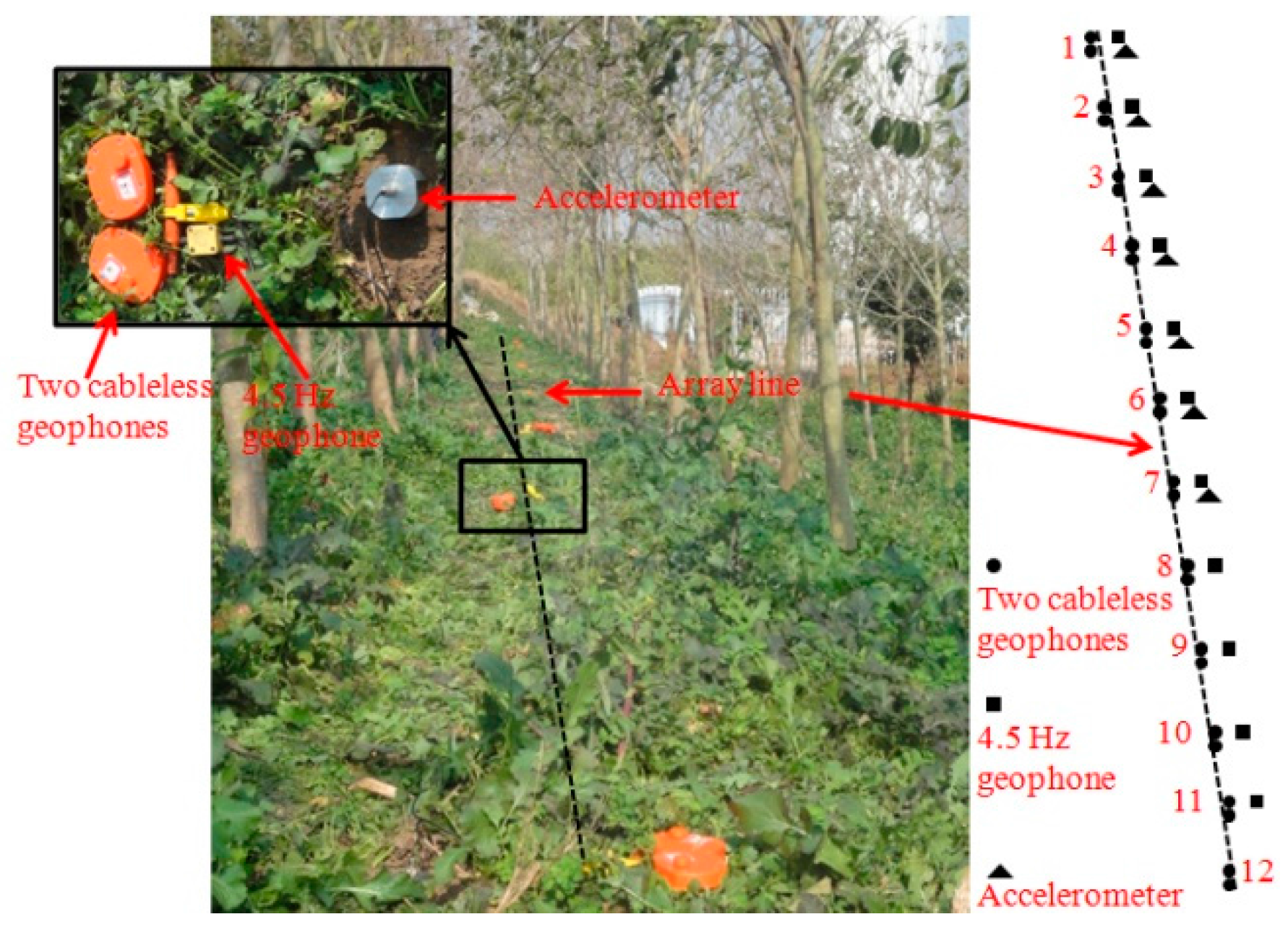
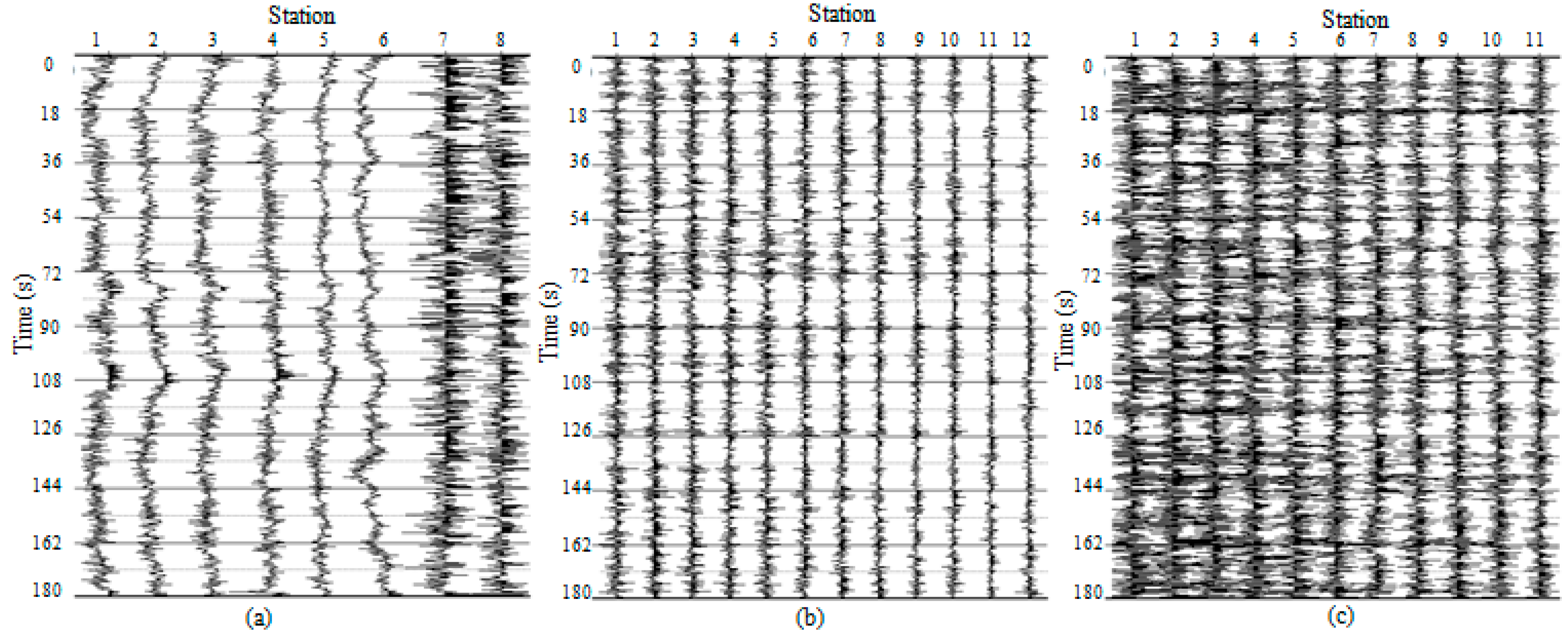
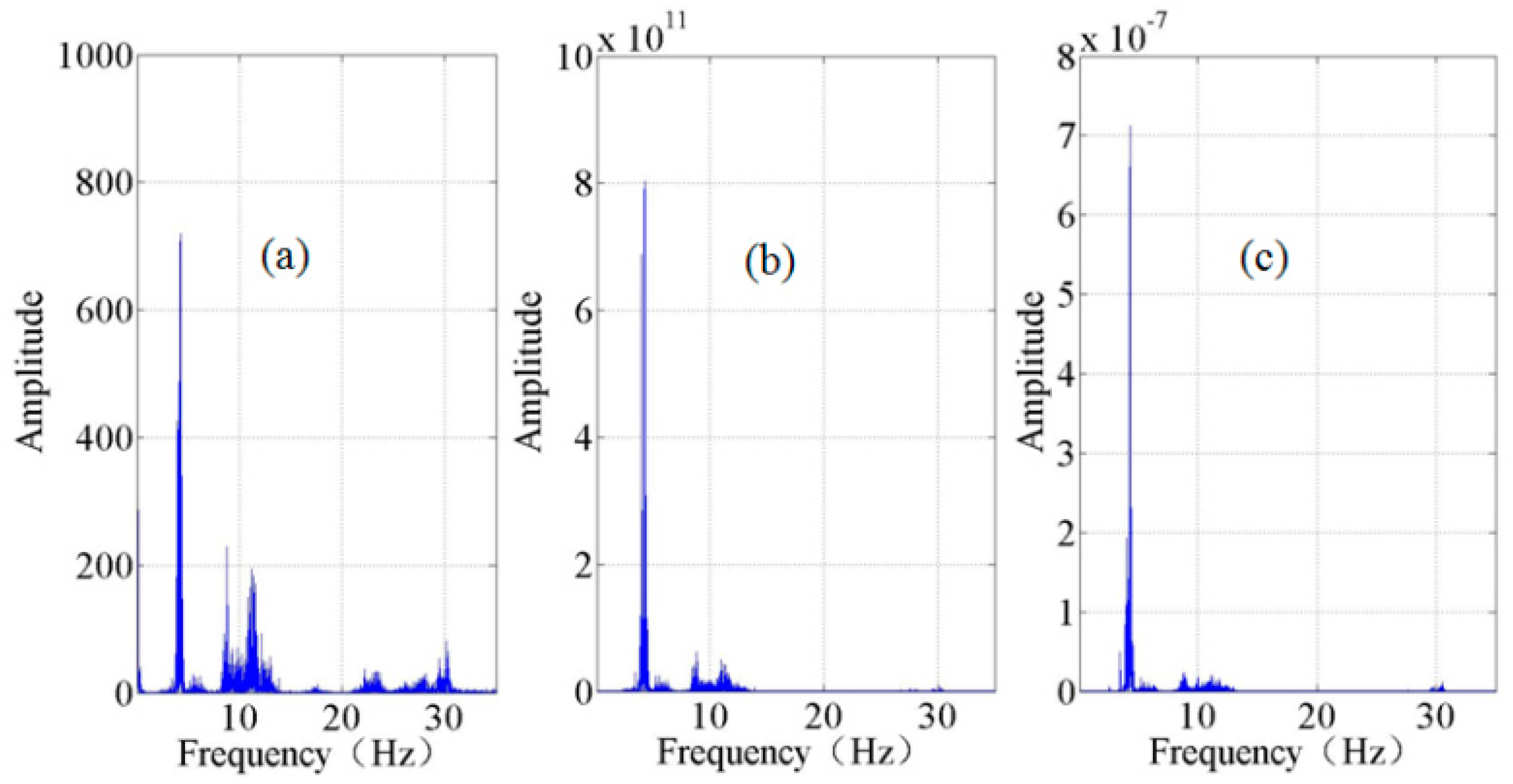
3.2. Field Testing at a Wind Farm
| Technical Specifics | Accelerometer | |
|---|---|---|
| Sensitivity | 40,000 mV/g | |
| Measurement range | 0.12 g | |
| Frequency band | 0.5–1000 (±10%) Hz | |
| Resonant frequency | 3 kHz | |
| Resolution | 0.0000005 g | |
| Operation temperature | −40~+120 | |
| Weight | 310 gm | |
| Size | Diameter | 45 mm |
| Height | 30.5 mm | |
| Description | Value/Range | |
|---|---|---|
| Natural frequency (Hz) | 4.5% ± 10% | |
| Sensitivity (V/cm/s) | 0.28% ± 5% | |
| Coil resistance (Ω) | 365% ± 5% | |
| Open circuit damping | 0.7% ± 10% | |
| Harmonic distortion | ≤0.2 | |
| Insulation resistance (MΩ) | ≥20 | |
| Maximum coil travel (mm) | 2 | |
| Inertial mass weight (g) | 8.5 | |
| Operation temperature (oC) | −40~+75 | |
| Weight (g) | 85 | |
| Dimension (mm) | Diameter | 27.2 |
| Height | 34 | |


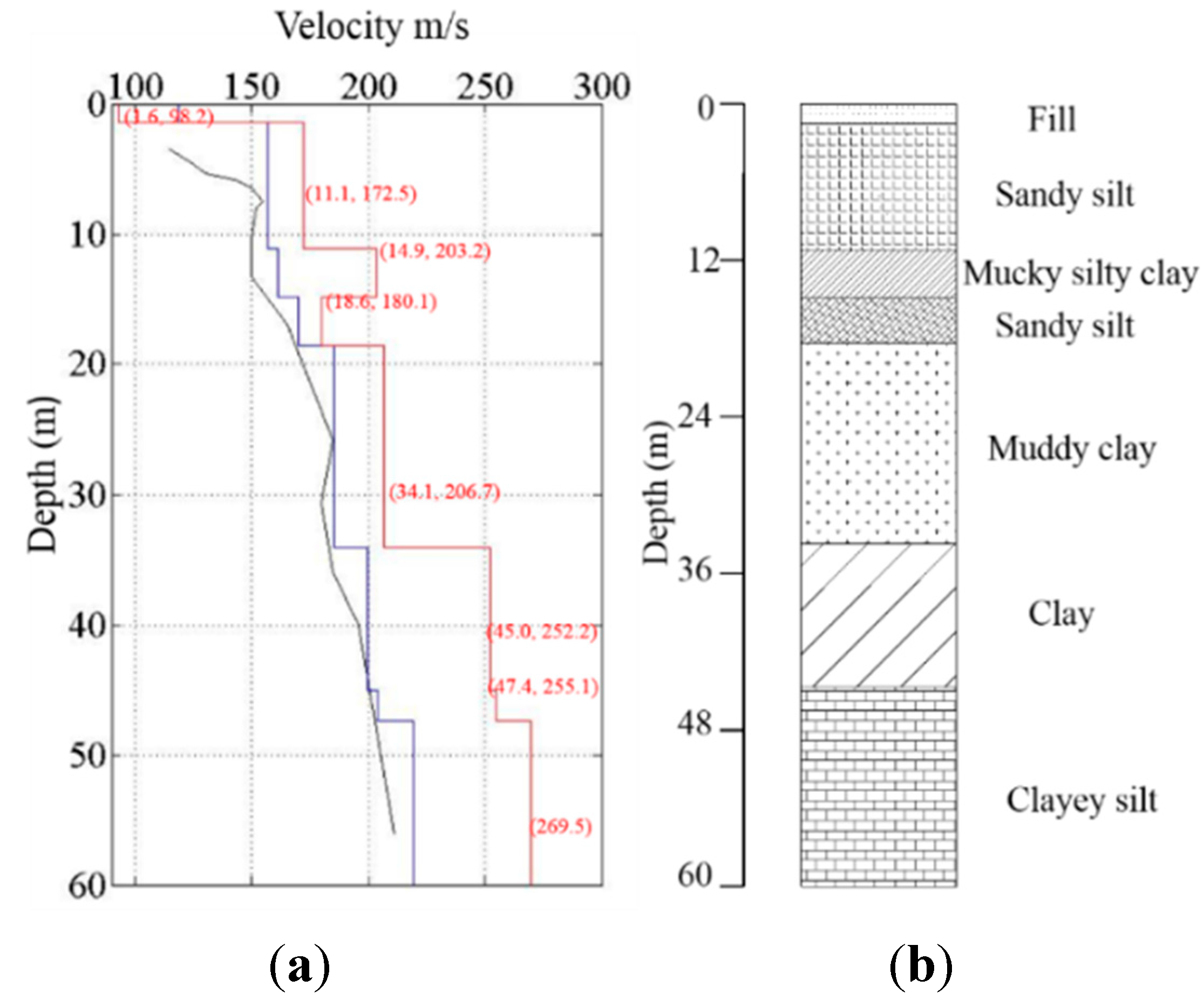
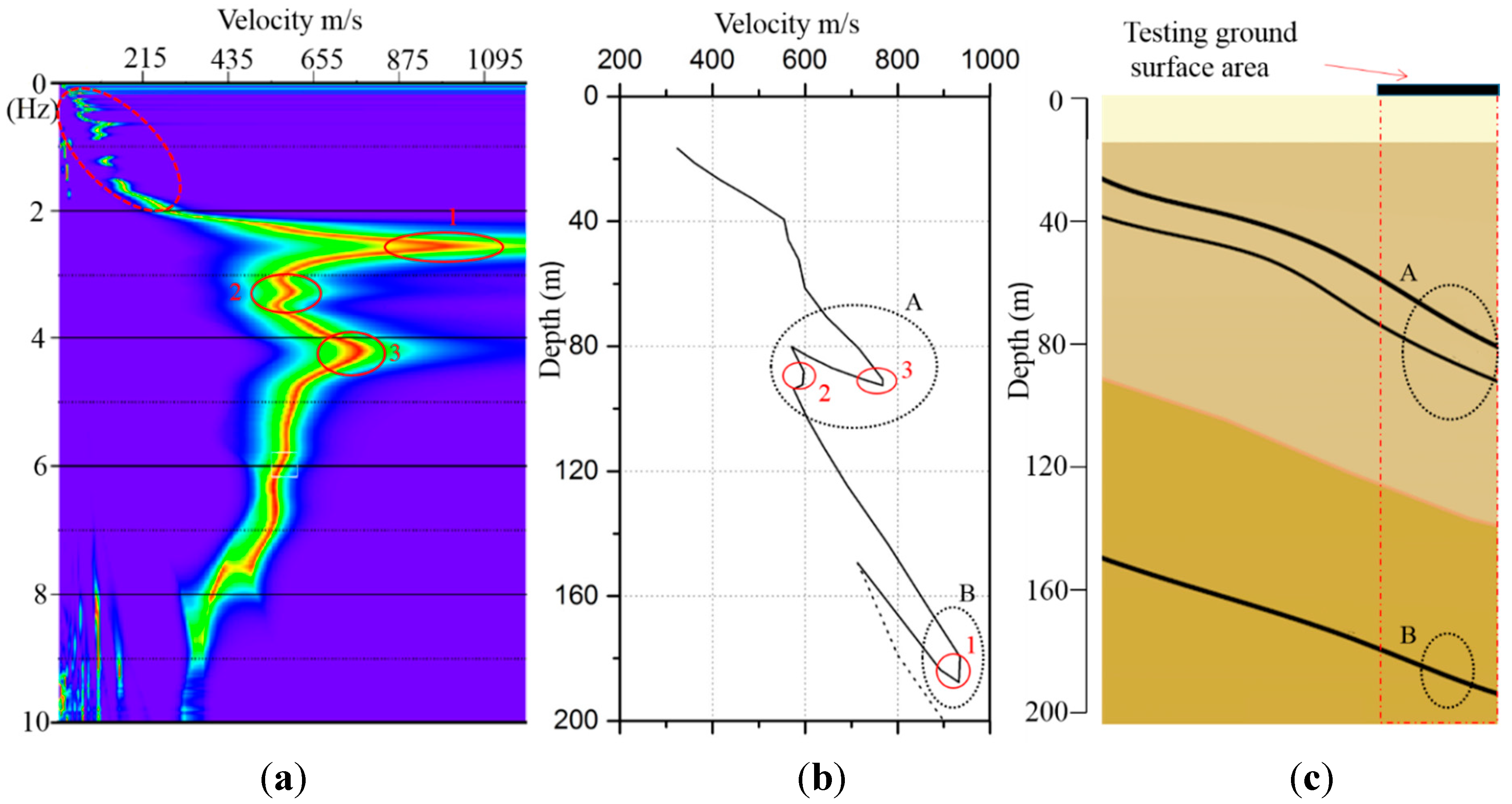
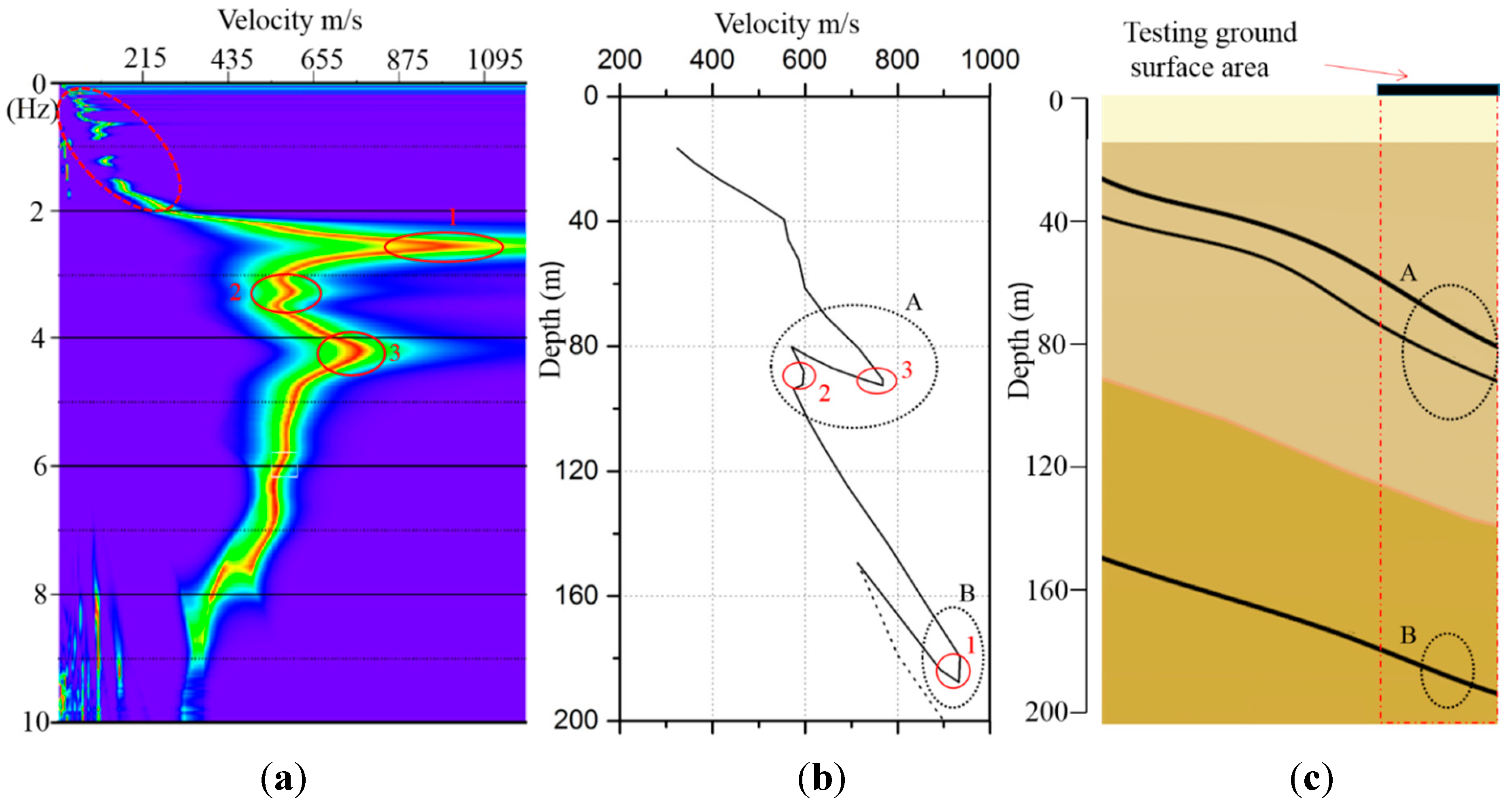
3.3. Field Testing at an Abandoned Coal Mine
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Das, B.; Sobhan, K. Principles of Geotechnical Engineering, 6th ed.; Nelson of Thomson: Toronto, ON, Canada, 2006; pp. 629–650. [Google Scholar]
- Anderson, N.L.; Croxton, N.; Hoover, R.; Sirles, P. Geophysical methods commonly employed for geotechnical site characterization. In Transportation Research Circular (E-C130); Transportation Research Board: Washington, DC, USA, 2008; pp. 1–21. [Google Scholar]
- Pelekis, P.C.; Athanasopoulos, G.A. An overview of surface wave methods and a reliability study of a simplified inversion technique. Soil Dyn. Earthq. Eng. 2011, 31, 1654–1668. [Google Scholar] [CrossRef]
- Foti, S.; Parolai, S.; Albarello, D.; Picozzi, M. Application of surface-wave methods for seismic site characterization. Surv. Geophys. 2011, 32, 777–825. [Google Scholar] [CrossRef]
- Richart, F.E.; Hall, J.R.; Woods, R.D. Vibrations of Soils and Foundations; Prentice Hall: Englewood Cliffs, NJ, USA, 1970. [Google Scholar]
- Nazarian, S.; Stokoe, I.I.; Kenneth, H.; Hudson, W.R. Use of spectral analysis of surface waves method for determination of moduli and thicknesses of pavement systems. Transp. Res. Rec. 1983, 930, 38–45. [Google Scholar]
- Park, C.B.; Miller, R.D.; Xia, J. Multichannel analysis of surface waves. Geophysics 1999, 64, 800–808. [Google Scholar] [CrossRef]
- Park, C.B.; Miller, R.D. Multichannel analysis of passive surface waves—Modeling and processing schemes. In Proceedings of the Site Characterization and Modeling, Geo-Frontiers Congress 2005, Austin, TX, USA, 24–26 January 2005; pp. 1–14.
- Louie, J.N. Faster, better: Shear-wave velocity to 100 meters depth from refraction microtremor arrays. Bull. Seismol. Soc. Am. 2001, 91, 347–364. [Google Scholar] [CrossRef]
- Cadet, H.; Macau, A.; Benjumea, B.; Bellmunt, F.; Figueras, S. From ambient noise recordings to site effect assessment: The case study of Barcelona microzonation. Soil Dyn. Earthq. Eng. 2011, 31, 271–281. [Google Scholar] [CrossRef]
- Karastathis, V.K.; Karmis, P.; Novikova, T.; Roumelioti, Z.; Gerolymatou, E.; Papanastassiou, D.; Liakopoulos, S.; Tsombos, P.; Papadopoulos, G.A. The contribution of geophysical techniques to site characterisation and liquefaction risk assessment: Case study of Nafplion City, Greece. J. Appl. Geophys. 2010, 72, 194–211. [Google Scholar] [CrossRef]
- Tallavó, F.; Cascante, G.; Pandey, M. Experimental and numerical analysis of MASW tests for detection of buried timber trestles. Soil Dyn. Earthq. Eng. 2009, 29, 91–102. [Google Scholar] [CrossRef]
- Manakou, M.V.; Raptakis, D.G.; Chávez-García, F.J.; Apostolidis, P.I.; Pitilakis, K.D. 3D soil structure of the Mygdonian basin for site response analysis. Soil Dyn. Earthq. Eng. 2010, 30, 1198–1211. [Google Scholar] [CrossRef]
- Arosio, D.; Longoni, L.; Papini, M.; Zanzi, L. Seismic characterization of an abandoned mine site. Acta Geophys. 2013, 61, 611–623. [Google Scholar] [CrossRef]
- Aki, K. Space and time spectra of stationary stochastic waves, with special reference to microtremors. Bull. Earthq. Res. Inst. 1957, 35, 415–456. [Google Scholar]
- Okada, H. The Microtremor Survey Method; Geophysical Monograph Series No. 12; Society of Exploration Geophysicists: Tulsa, OK, USA, 2003; pp. 57–59. [Google Scholar]
- Capon, J. High-resolution frequency-wavenumber spectrum analysis. IEEE Proc. 1969, 57, 1408–1418. [Google Scholar] [CrossRef]
- Nogoshi, M.; Igarashi, T. On the amplitude characteristics of microtremor. J. Seismol. Soc. Jpn. 1971, 24, 26–40. [Google Scholar]
- Hons, M.S. Seismic Sensing: Comparison of Geophones and Accelerometers Using Laboratory and Field Data; University of Calgary: Calgary, AB, Canada, 2008. [Google Scholar]
- Aizawa, T.; Kimura, T.; Matsuoka, T.; Takeda, T.; Asano, Y. Application of MEMS accelerometer to geophysics. Int. J. JCRM 2009, 4, 33–36. [Google Scholar]
- Dai, K.S.; Li, X.F. Surface wave survey method and accelerometer-based field testing cases. In Proceedings of the Geo-Hubei 2014 International Conference on Sustainable Civil Infrastructure, Yichang, China, 20–22 July 2014; pp. 79–86.
- Guralp Systems Limited. Available online: http://www.guralp.com/documents/MAN-040-0001.pdf (accessed on 5 December 2014).
- Jin, X.; Sarkar, S.; Ray, A.; Gupta, S.; Damarla, T. Target detection and classification using seismic and PIR sensors. IEEE Sens. J. 2012, 12, 1709–1718. [Google Scholar] [CrossRef]
- Huang, J.; Zhou, Q.; Zhang, X.; Song, E.; Li, B.; Yuan, X. Seismic target classification using a wavelet packet manifold in unattended ground sensors systems. Sensors 2013, 13, 8534–8550. [Google Scholar] [CrossRef] [PubMed]
- Picozzi, M.; Milkereit, C.; Parolai, S.; Jaeckel, K.H.; Veit, I.; Fischer, J.; Zschau, J. GFZ wireless seismic array (GFZ-WISE), a wireless mesh network of seismic sensors: New perspectives for seismic noise array investigations and site monitoring. Sensors 2010, 10, 3280–3304. [Google Scholar] [CrossRef] [PubMed]
- Chongqing Geological Instrument Factory (CGIF). Available online: http://www.cgif.com.cn/index.aspx (accessed on 5 December 2014).
- Hutt, C.R.; Evans, J.R.; Followill, F.; Nigbor, R.L.; Wielandt, E. Guidelines for standardized testing of broadband seismometers and accelerometers; Open-File Report 2009-1295; U.S. Geological Survey: Reston, VA, USA, 2010. [Google Scholar]
- Peterson, J. Observations and modeling of seismic background noise. U.S. Geological Survey. Open File Rep. 1993, 41, 93–322. [Google Scholar]
- Texas Instruments. Available online: http://www.ti.com/product/ua741 (accessed on 5 December 2014).
- Linear Technology. Available online: http://www.linear.com/product/LT1028 (accessed on 5 December 2014).
- Analog Devices. Available online: http://www.analog.com/static/imported-files/data_sheets/OP27.pdf (accessed on 15 November 2014).
- Analog Devices. Available online: http://www.analog.com/static/imported-files/data_sheets/AD7766.pdf (accessed on 3 November 2014).
- Texas Instruments. Available online: http://www.ti.com/lit/ds/symlink/ads1281.pdf (accessed on 10 November 2014).
- Cirrus Logic. Available online: http://www.cirrus.com/en/pubs/proDatasheet/CS5371A-72A_F3.pdf (accessed on 31 August 2015).
- Texas Instruments. Available online: http://www.ti.com/lit/ds/sbas184d/sbas184d.pdf (accessed on 8 December 2014).
- NXP. Available online: http://www.nxp.com/documents/data_sheet/LPC11U2X.pdf (accessed on 20 January 2015).
- GPS Engine Board SR-100. Available online: http://www.progin.com.tw/sr100_en.htm (accessed on 10 December 2014).
- Huang, Y.; Ye, W.; Chen, Z. Seismic response analysis of the deep saturated soil deposits in Shanghai. Environ. Geol. 2009, 56, 1163–1169. [Google Scholar] [CrossRef]
- Zhang, B.X.; Lu, L.Y.; Bao, G.S. A study on zigzag dispersion curves in Rayleigh wave exploration. Chin. J. Geophys. 2002, 45, 265–276. [Google Scholar] [CrossRef]
- Faber, K.; Maxwell, P.W. Geophone spurious frequency: What is it and how does it affect seismic data quality? Can. J. Explor. Geophys. 1997, 33, 46–54. [Google Scholar]
- Tokimatsu, K.; Tamura, S.; Kojima, H. Effects of multiple modes on Rayleigh wave dispersion characteristics. J. Geotech. Eng. 1992, 118, 1529–1543. [Google Scholar] [CrossRef]
- Lu, L.; Zhang, B. Analysis of dispersion curves of Rayleigh waves in the frequency-wavenumber domain. Can. Geotech. J. 2004, 41, 583–598. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dai, K.; Li, X.; Lu, C.; You, Q.; Huang, Z.; Wu, H.F. A Low-Cost Energy-Efficient Cableless Geophone Unit for Passive Surface Wave Surveys. Sensors 2015, 15, 24698-24715. https://doi.org/10.3390/s151024698
Dai K, Li X, Lu C, You Q, Huang Z, Wu HF. A Low-Cost Energy-Efficient Cableless Geophone Unit for Passive Surface Wave Surveys. Sensors. 2015; 15(10):24698-24715. https://doi.org/10.3390/s151024698
Chicago/Turabian StyleDai, Kaoshan, Xiaofeng Li, Chuan Lu, Qingyu You, Zhenhua Huang, and H. Felix Wu. 2015. "A Low-Cost Energy-Efficient Cableless Geophone Unit for Passive Surface Wave Surveys" Sensors 15, no. 10: 24698-24715. https://doi.org/10.3390/s151024698