Constrained State Estimation for Individual Localization in Wireless Body Sensor Networks

Abstract
: Wireless body sensor networks based on ultra-wideband radio have recently received much research attention due to its wide applications in health-care, security, sports and entertainment. Accurate localization is a fundamental problem to realize the development of effective location-aware applications above. In this paper the problem of constrained state estimation for individual localization in wireless body sensor networks is addressed. Priori knowledge about geometry among the on-body nodes as additional constraint is incorporated into the traditional filtering system. The analytical expression of state estimation with linear constraint to exploit the additional information is derived. Furthermore, for nonlinear constraint, first-order and second-order linearizations via Taylor series expansion are proposed to transform the nonlinear constraint to the linear case. Examples between the first-order and second-order nonlinear constrained filters based on interacting multiple model extended kalman filter (IMM-EKF) show that the second-order solution for higher order nonlinearity as present in this paper outperforms the first-order solution, and constrained IMM-EKF obtains superior estimation than IMM-EKF without constraint. Another brownian motion individual localization example also illustrates the effectiveness of constrained nonlinear iterative least square (NILS), which gets better filtering performance than NILS without constraint.1. Introduction
In recent years, ultra-wide-band (UWB) technologies have drawn great interest in the wireless community [1]. The development of UWB has ushered in a new era in short-range wireless communications. Among various potential applications, one of the most promising applications is wireless body sensor networks (WBSNs) [2–4] based on UWB radio, which consist multiple low-cost, low data-rate and self-organized wireless sensors attached to, or implanted into, the human body, and have recently received a lot of research interests due to their wide applications in health-care, security, sports and entertainment. For location-aware applications requiring indoor positioning or motion capture features, global position information of the WBSNs or each individual sensor position are required [5,6].
In the WBSNs localization context, location estimators can be divided into two categories, non-probabilistic and probabilistic estimators. The typical algorithm of non-probabilistic estimator is weighted least squares (WLS) [2] which does not necessitate prior information. While probabilistic estimator consists in locating the mobile nodes based on probabilistic assumptions. The latter can be based on a priori statistical models for the observed measurements conditioned on the mobile positions, such as likelihood functions. Accordingly, these algorithms are usually more accurate than simple non-probabilistic estimators like WLS in the view of information fusion.
The probabilistic estimators can be classified into two categories, namely Bayesian and Non-Bayesian approaches. Non-Bayesian estimators assume that the mobile positions are treated as unknown deterministic parameters whereas mobile positions are defined as random variables with known prior distributions in Bayesian estimators. Kalman Filter (KF), as one of the most popular Bayesian estimator has been mainly adopted for tracking applications [7,8], for instance in vehicular or personal navigation applications. But in typical wireless tracking problems, due to the non-linearity of the measurement function, the Extended Kalman Filter (EKF) may be adopted instead, which consists in preserving the full KF formalism after linearizing locally the incriminated function around the predicted state. Both KF and EKF are well known and popular in the wireless body sensor networks [9–11], due to their simplicity and practicability for implementation. In the case of maneuvering targets, where the target switches between multiple states, the interactive multiple model (IMM) is employed. IMM uses a bank of filters processing in parallel, with each filter acting on a dynamic model.
Apart from the state filtering system, we might have information about a system that the filtering algorithm does not incorporate. For example, we may know that the states satisfy equality or inequality constraints. There are many examples of state-constrained systems in engineering applications. Some of these examples include, fault diagnosis [12], vision-based systems [13], target tracking [14,15], robotics [16], and navigation [17]. Recently, fixed-length links between on-body modes in WBSNs as additional constraints to improve the localization accuracy have been paid much attention. Mhedhbi et al. [18] adapts a centralized classical Multidimensional Scaling (MDS) for on-body MoCap applications and pose estimation. The authors introduce additional constraints relying on the prior knowledge of minimal and maximal feasible distances related to the body dimensions (and thus some kinds of geographical limitations). In [19] the centralized Maximum Likelihood estimator has been considered, introducing other constraints relying on the actual positions of on-body mobile nodes. In [20], the Constrained Distributed Weighted Multi-Dimensional Scaling (CDWMDS) algorithm is proposed for coarse WBAN motion capture, where nodes' locations are asynchronously estimated in a body-strapped Local Coordinate System (LCS), using information from their 1-hop neighbors. Fixed-length links (e.g., between the hand's wrist and the elbow) are also incorporated as geometric constraints, limiting the number of required on-line measurements, while still benefitting from a mesh topology. However, the above methods are all based non-Bayesian localization method.
In this paper, we investigate Bayesian localization method for UWB-based individual localization and aim at increasing the localization accuracy. Due to the harsh propagation environment in vicinity of the human body, the positioning accuracy can be degraded [21]. The major sources of this impairment are multi-path propagation and potential non-line-of-sight conditions. To overcome these problems, we investigate the improvement in the positioning accuracy by taking the a priori knowledge about geometry among the on-body nodes into account. For example, the distances between any two on-body nodes are fixed. From a practical point of view, the prior knowledge of the on-body nodes' distance can be obtained by letting the user deploy the nodes within a reasonably given area (e.g., drawn on a specific piece of clothes, typically on the torso). This information can be interpreted as additional reference measurements, which improves the localization accuracy in the view of information fusion. Our goal is how to introduce the fixed-length link constraints into the traditional Bayesian filtering algorithm.
In this paper, considering the priori knowledge about geometry among the on-body nodes, a novel constrained state estimation for individual localization is presented. Employing the Taylor series expansion of the nonlinear constraints and maintaining the first term and second term separately, IMM-EKF with first-order and second-order linearizations constraint are proposed respectively. Furthermore we discuss the two linearized methods influenced on the state estimation results through simulations. In this paper, our contribution is that we propose the constrained IMM-EKF algorithm for UWB based individual localization, exploit second-order nonlinear state constraints providing better approximation for higher order nonlinearities and demonstrate the effectiveness of the new method on an individual localization example, compared with the unstrained IMM-EKF. Note that, even the proposed constrained state estimation method is intended for Bayesian filtering algorithm, it can also be applied into the non-Bayesian algorithm, such as nonlinear iterative least square (NILS) [22].
The paper is organized as follows. Section 2 gives a brief formulation of individual localization problem. Section 3 presents the projection method for state estimation with linear constraint, and the first-order and second-order linearizations are proposed to extend the projection method to nonlinear cases. Section 4 applies the constrained state estimation into IMM-EKF for UWB based individual localization. Section 5 presents some simulation results to evaluate the algorithm. Finally, Section 6 closes with some conclusions and suggestions for future works.
2. Problem Formulation
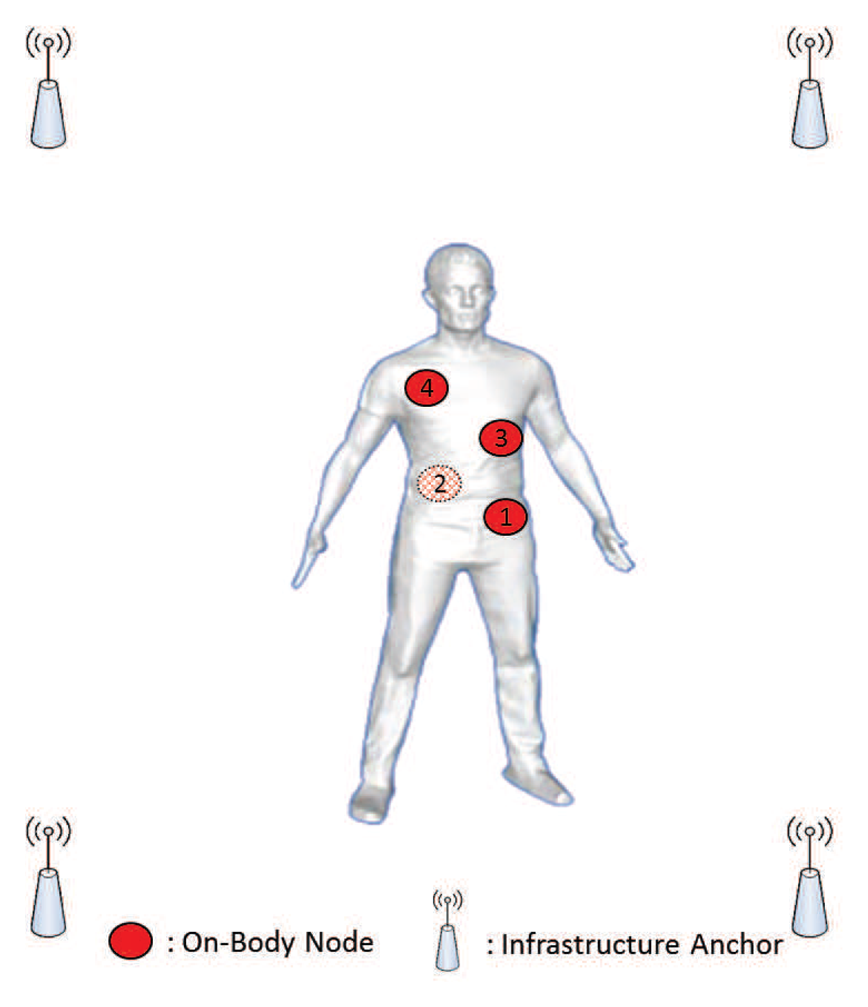
A typical WBSNs indoor localization scenario is presented in Figure 1. Each WBSNs consists m + n nodes, where n is the number of mobile nodes to be located on the body (the red dots in Figure 1), and m is the number of anchors with known positions (the infrastructure anchors in Figure 1), where m should be equal or larger than 3. In the following, [X1(k), ⋯, Xn(k)] is the vector of unknown 3-Dimensional coordinates at time k and [Xn+1, ⋯, Xn+m] is a vector of known and time-invariant positions of anchors.
We assume that anchors broadcast periodic beacon signals on a dedicated control channel, and that each WBSNs operates on a different channel frequency to avoid interference stemming from anchors and neighboring WBSNs. Moreover, we consider that each node is able to perform TDOA based (Time-Difference-Of-Arrival) range measurements [23] with respect to anchors within communication range and TOA based (Time-Of-Arrival) range measurements to other nodes associated to the same body area network. These distance measurements can be used together with the known anchor positions to localize the corresponding node relative to the anchors. Then the movement of the body is tracked by determining the nodes positions. Consider the following dynamic equation and measurement equation of the system given by
Given all the available IR-UWB TOA measurements {d̃ij(k)}i,j at time k, given existing constraints related to the body geometry and the known locations of the infrastructure anchors, the problem considered in this paper consists in estimating the absolute positions of the carrying bodies in the global coordinate system, relying on their on-body nodes.
3. State Estimation with Constraint
3.1. State Estimation with Linear Constraint
Considering the same system defined in Equations (1) and (2), suppose there are some linear constraints in the state evolvement which are formulated using an equality formula as
Let X̃ denotes the modified state estimation, W denotes arbitrary symmetric positive definite matrix, X̂ denotes the general state estimation before considering the condition of constraints. The estimation problem with state constraints translates into an optimization problem
Use the Lagrange multiplier method to solve the above equation. Firstly, we construct the formula
Subsequently, calculate the partial derivatives and the results of each component are set zero, i.e.,
Thus we obtain
The method is called projection method via modifying state estimation. That is to say, the current state estimation is projected on the constrained subspace.
3.2. Sate Estimation with First-Order Linearization Nonlinear Constraint
For the nonlinear constraint g(X) = d, we can perform a Taylor series expansion of the constraint equation around the state prediction X̂− to obtain
Neglecting the second-order term gives
This equation is equivalent to the linear constraint if
Thus nonlinear constraints are linearized. Sometimes, though, we can do better than simple first-order linearization, as discussed in the following sections.
3.3. State Estimation with Second-Order Linearization Nonlinear Constraint
If we keep the second-order term in Taylor series expansion then the constrained estimation problem is second-order linearization nonlinear constraints. Then the constrained estimation problem can be approximately written as
As a nonlinear equation in λ, it is difficult to find a closed-form solution in general for the nonlinear equation q(λ) = 0 in Equation (15). Numerical root-finding algorithms, the Newton's method may be used instead. Consider the case where W = GTG, z = GX and m = 0, the constrained solution is given by
5. Simulation Results
In our evaluation framework, only an individual localization is considered. The body moves in a 20 m × 20 m × 4 m 3D environment. The scene is surrounded by 4 infrastructure anchors, set at the corners. And there are 4 nodes placed on the body. The initial position of the 4 nodes are given in Table 1. And the measurement noise covariance is 0.09. The distance among the on-body nodes as additional constraints are given in Table 2 as below.
5.1. Simulation Case 1: Localize the CV Target Based on EKF
In the first simulation case, the individual moves at the constant speed of 0.4 m/s for an overall duration of 50 s. In other words, the model number r equals 1. The target state transition equation used in the CV tracking is
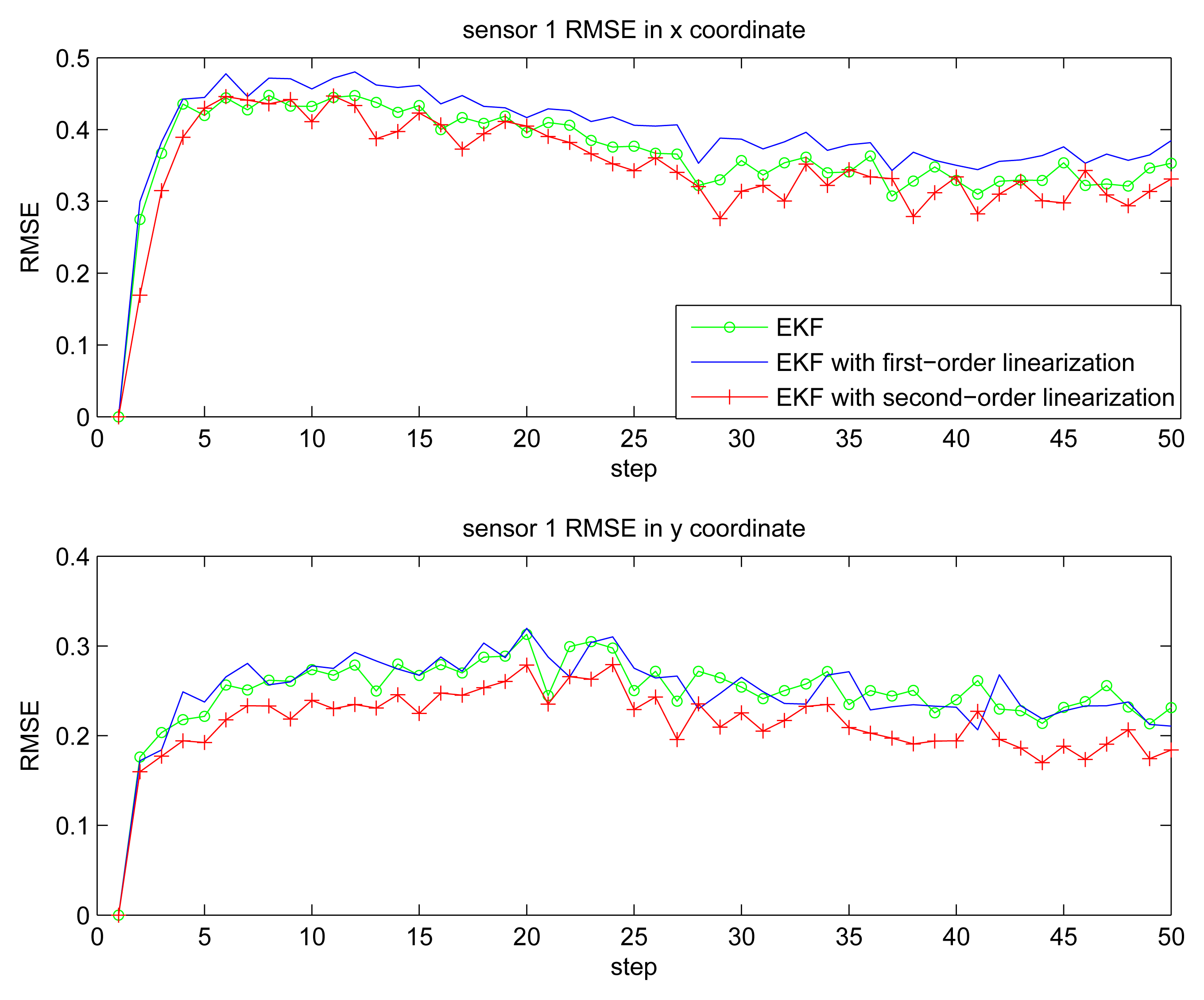
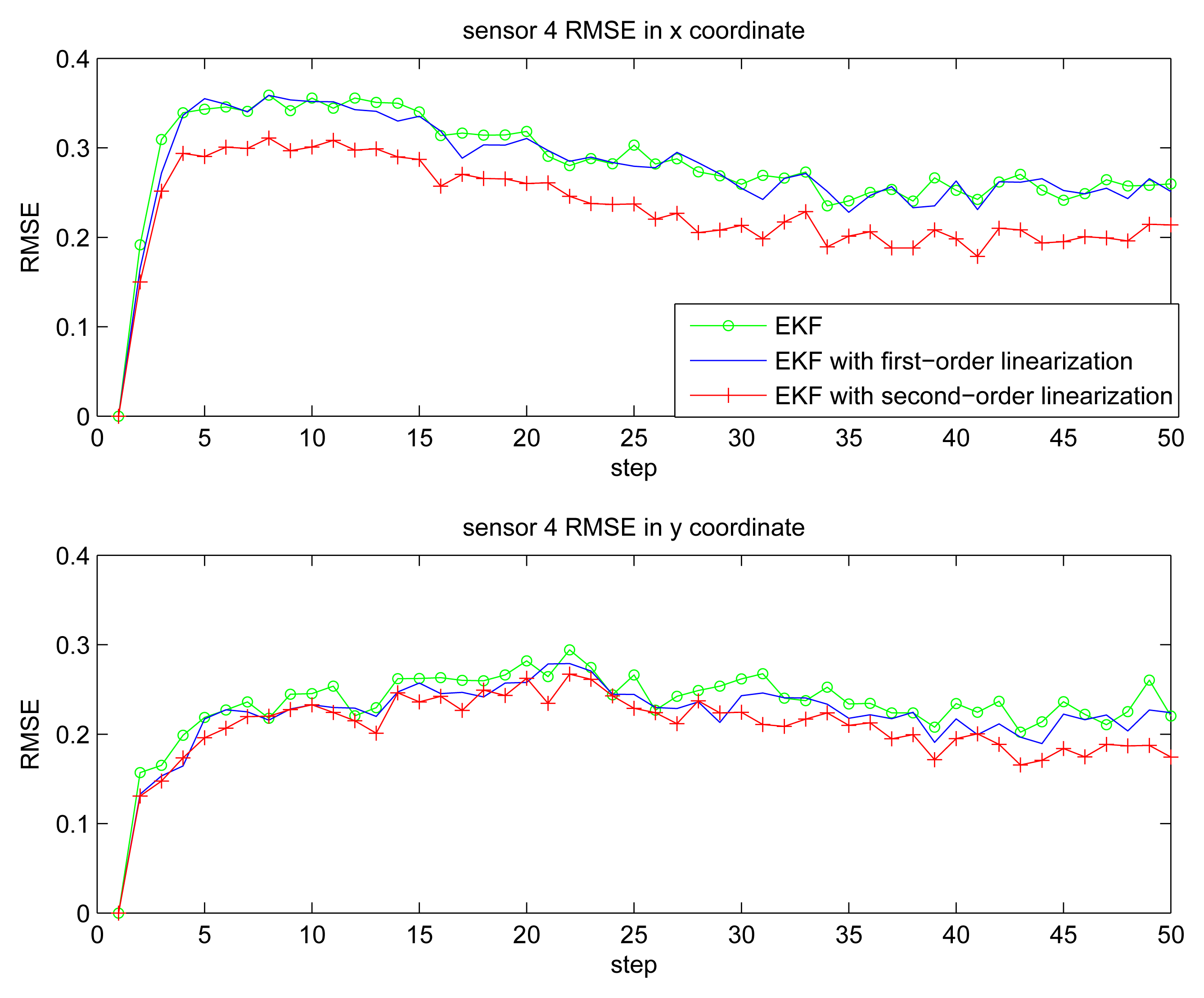
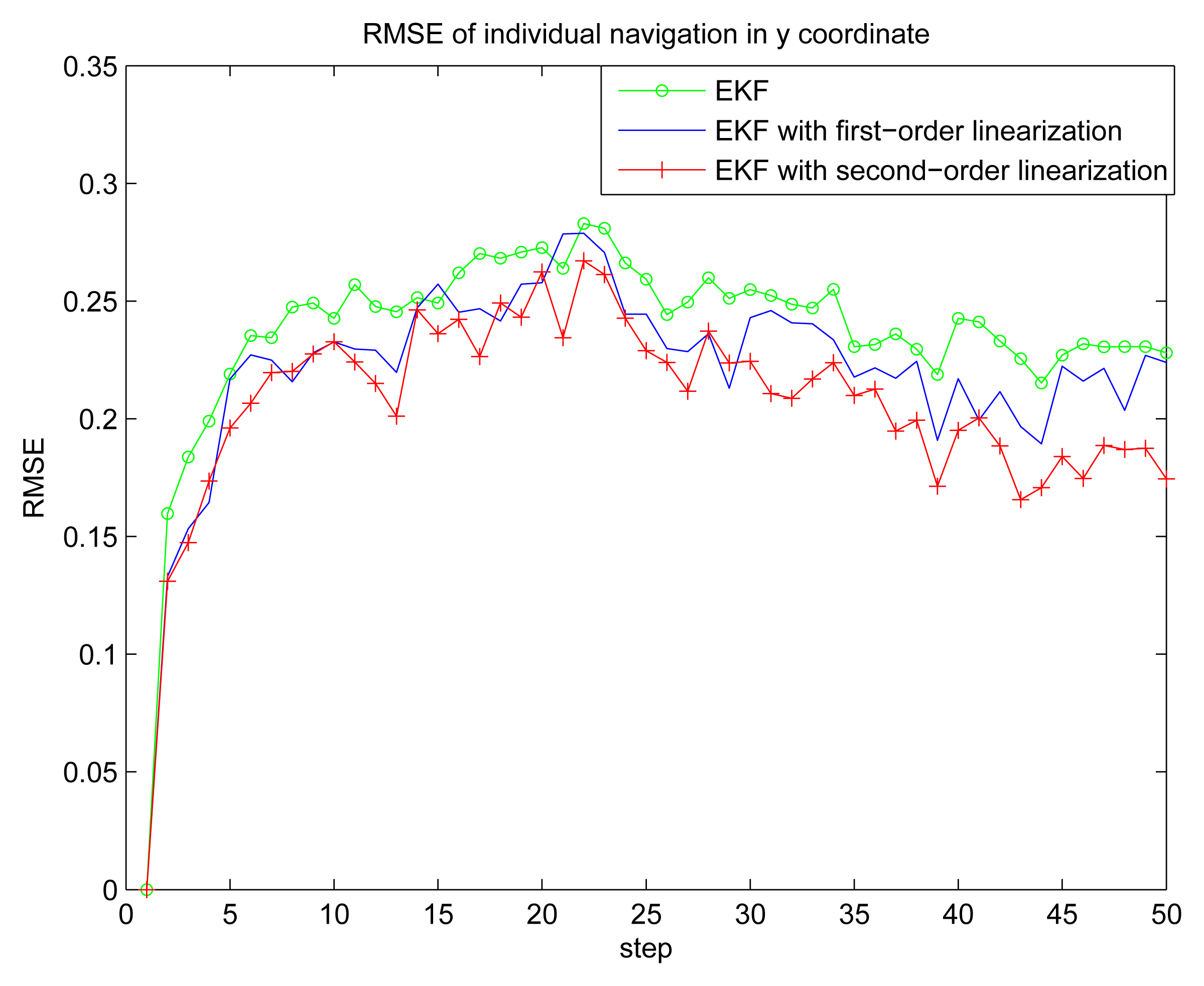
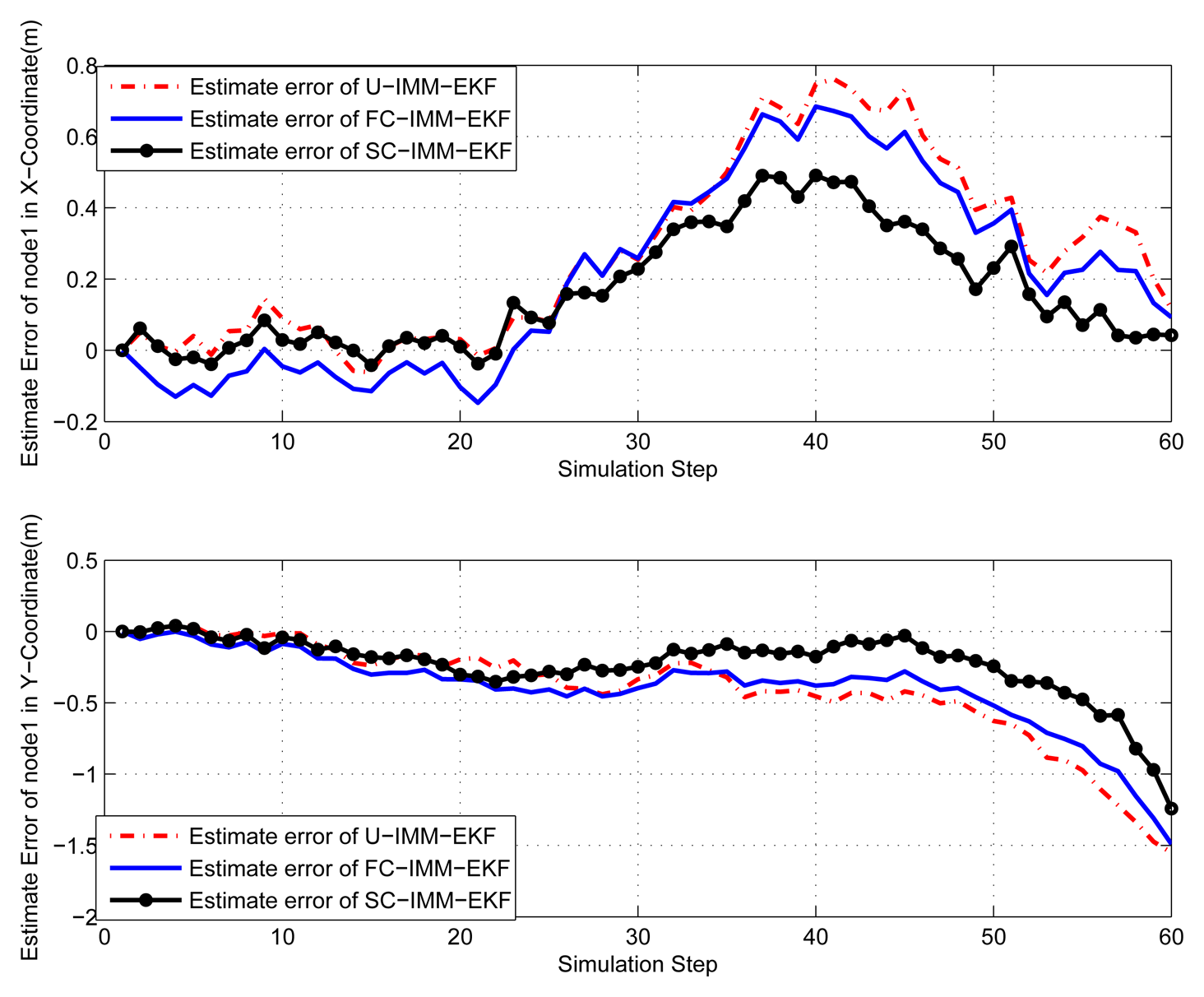
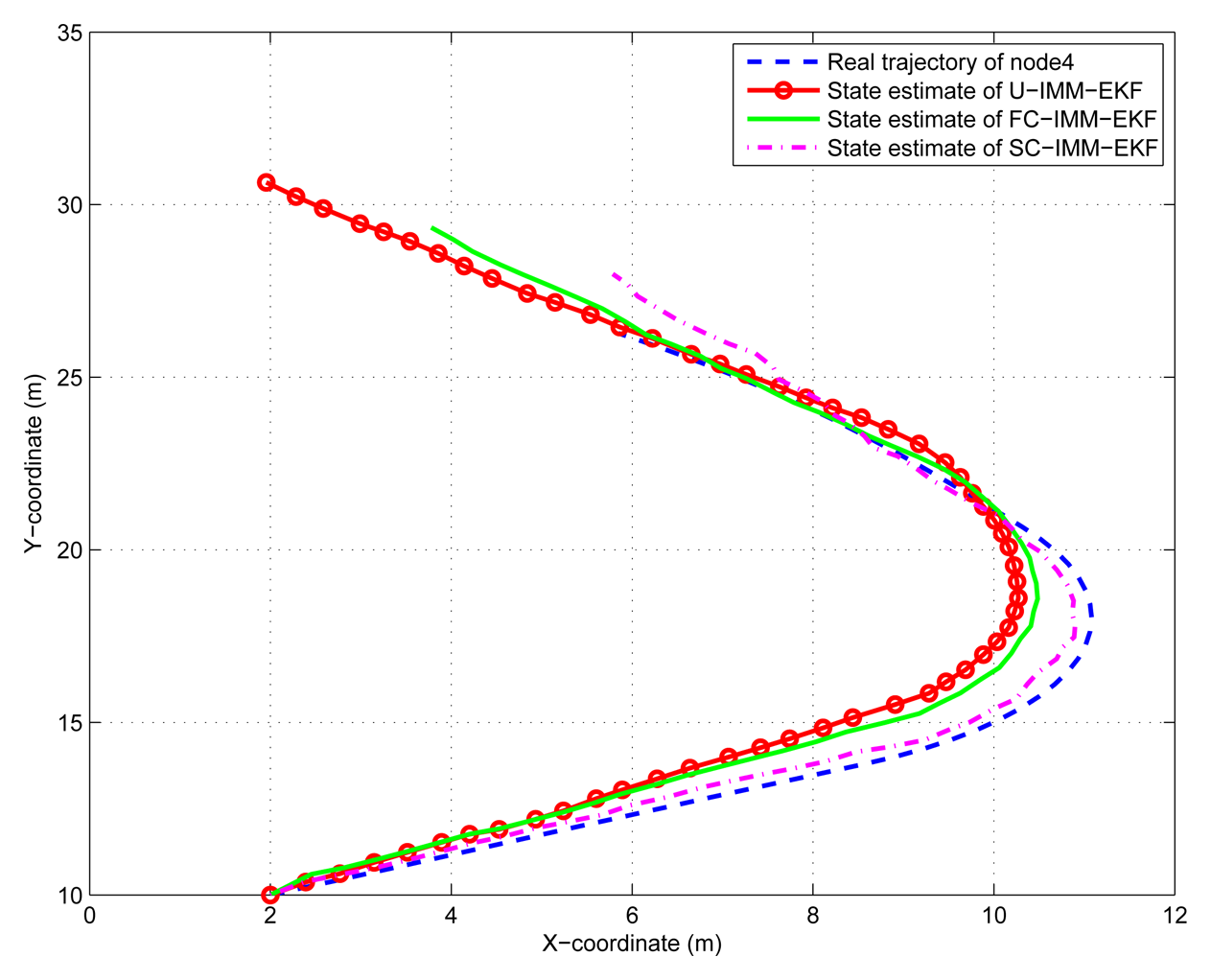
Figure 2 gives the estimation result of EKF based individual localization, which shows the method of EKF based individual localization is effective. In the following figures, comparisons among EKF, EKF with the first-order nonlinear constraints (FC-EKF) and EKF with second-order nonlinear constraints (SC-EKF) of localization accuracy based on 100 Monte-Carlo runs are given. Figures 3, 4, 5 and 6 show estimation results of 4 on-body nodes and Figures 7–8 show estimation results of individual localization. It can be seen that the constrained EKF results in much more accurate estimates than the unconstrained EKF, which verifies the effectiveness of the proposed method. Also, it can be seen that the estimation results of FC-EKF is worse than SC-EKF. The reason of this phenomenon is mainly the state constraints is of high order nonlinearity. Thus we can conclude that for higher-order nonlinear constraints, the second-order solution as presented in this paper would outperform a first-order solution.
5.2. Simulation Case 2: Localize the Maneuvering (CV-CT-CA) Target Based on IMM-EKF
An IMM-EKF switching between a (nearly) constant velocity (CV), (nearly) constant acceleration (CA) models and a coordinated turn (CT) model is simulated here: (1) CV for the first 20 time intervals (2) CT for the 20-40 time intervals (3) CA for the final 20 time intervals. Target state transition equation used in the CA tracking is
Target state transition equation used in the CT tracking is
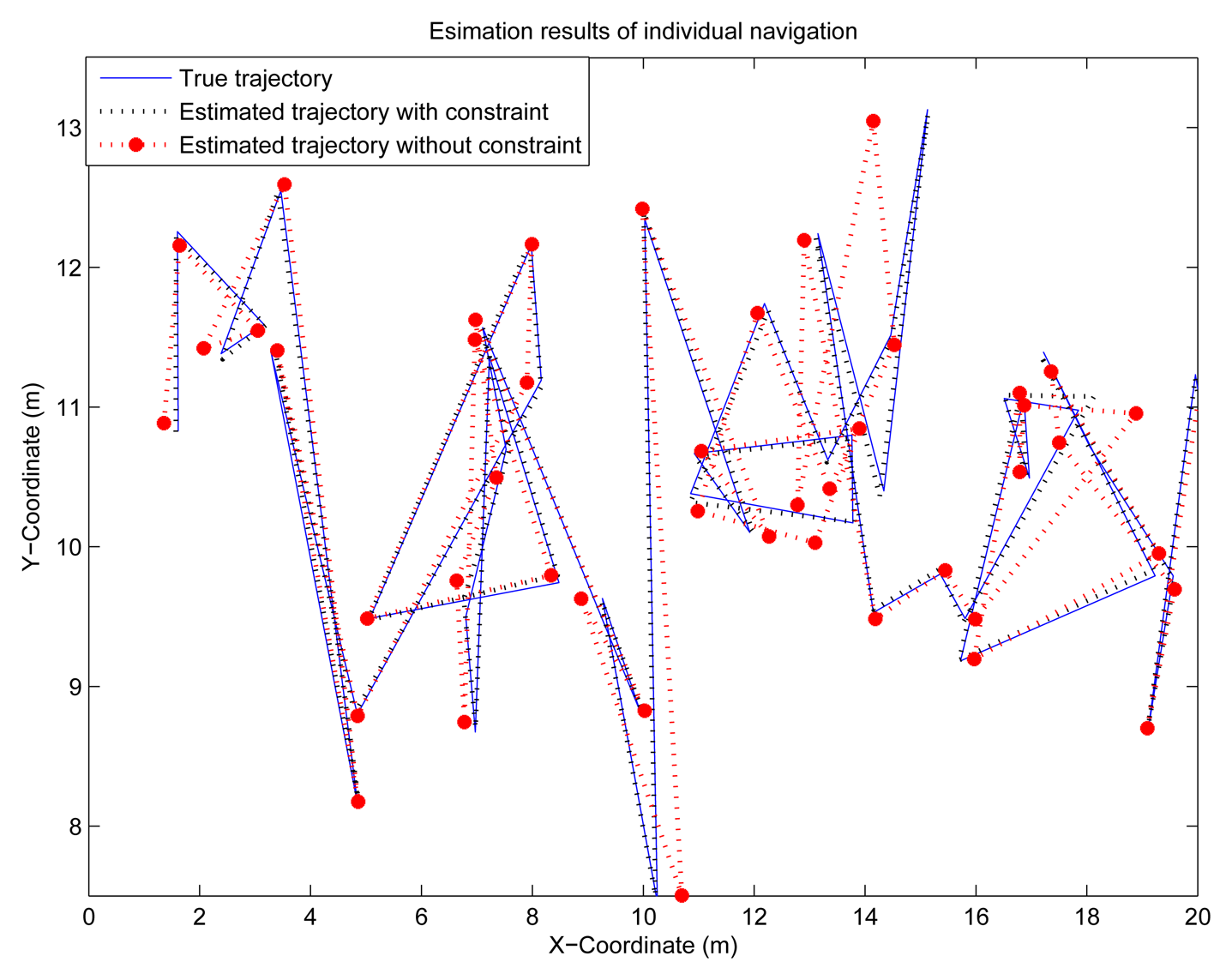
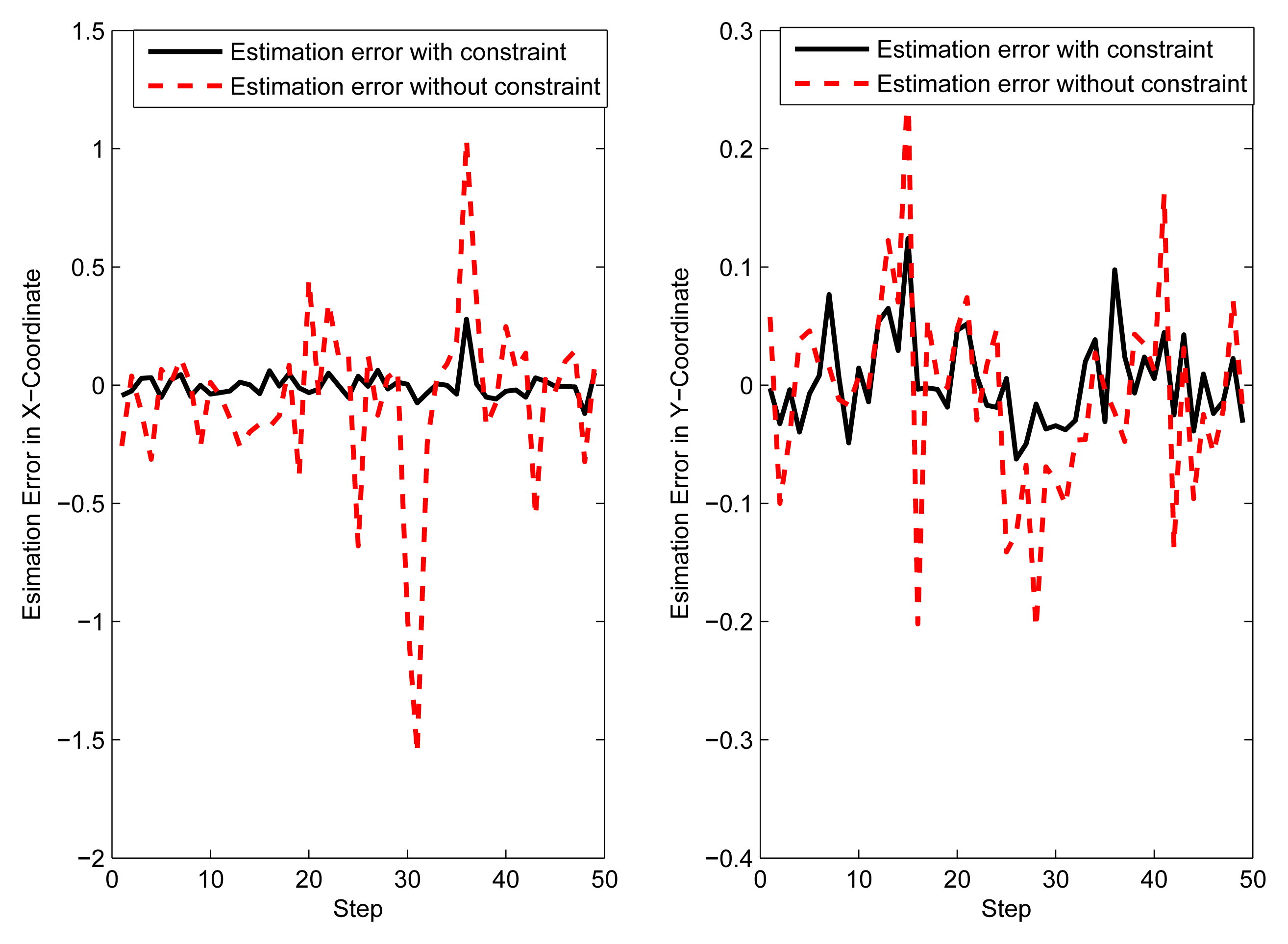
5.3. Simulation Case 3: Localize the Brownian Motion Target Based on NILS
In order to prove that the proposed constrained state estimation can also be applied in non-Baysian methods, individual localization based on nonlinear iterative least square (NILS) [22] is simulated here. It can be seen from Figures 13 and 14, that the constrained NILS provides much more accurate estimates than the unconstrained NILS, which verifies the effectiveness of the proposed method.
6. Conclusion
In order to further improve the localization accuracy of the individual localization problem, priori knowledge about geometry among the on-body nodes as additional constraints are incorporated into the traditional IMM-extended Kalman filter. A novel IMM-EKF with nonlinear constraints for individual localization in WBSNs is presented. Employing the Taylor series expansion of the nonlinear constraints and maintaining the first term and second term separately, IMM-EKF with first-order and second-order linearizations constraint are proposed respectively. Simulation results on an individual localization example demonstrate that the proposed constrained IMM-EKF method gets better estimation performance than the unconstrained IMM-EKF provides. And it is exploited that second-order nonlinear state constraints providing better approximation than the first-order case for high order nonlinearity constraint. Besides, simulation about localizing a Brownian motion target based on NILS proves the effectiveness of the proposed method on non-Baysian algorithm.
In this paper, we utilize the Newton's method to find the numerical root in Equation (15). Our future works will include searching for more efficient root finding algorithm to solve the Lagrangian multiplier. Other directions of our future work will show more theoretical results related to convergence and accuracy for nonlinear constrained IMM-EKF.
Acknowledgments
This work was supported by the National Science Foundation Council of China under Grant 61135001, and the Doctorate Foundation of Northwestern Polytechnical University (CX201320).
Author Contributions
Xiaoxue Feng and Hichem Snoussi conceived and designed the experiments; Xiaoxue Feng performed the experiments; Yan Liang and Lianmeng Jiao analyzed the data; Xiaoxue Feng wrote the paper.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Di Benedetto, M.G.; Kaiser, T.; Molish, A.F.; Oppermann, I.; Politano, C.; Porcino, D. UWB Communications Systems: A Comprehensive Overview; EURASIP: Darmstadt, Germany, 2005. [Google Scholar]
- Ben Hamida, E.; Manan, M.; Denis, B.; Ouvry, L. Localization performance in wireless body sensor networks with beacon enabled mac and space-time dependent channel model. Proceedings of the IEEE 21st International Symposium on Personal, Indoor and Mobile Radio Communications Workshops (PIMRC Workshops), Instanbul, Turkey, 26–30 September 2010; pp. 128–133.
- Yang, L.; Giannakis, G.B. Ultra-wideband communications: An idea whose time has come. IEEE Signal Process. Mag 2004, 21, 26–54. [Google Scholar]
- Cao, H.; Leung, V.; Chow, C.; Chan, H. Enabling technologies for wireless body area networks: A survey and outlook. IEEE Commun. Mag 2009, 47, 84–93. [Google Scholar]
- Gezici, S.; Poor, H. Position estimation via ultra-wide-band signals. IEEE Proc 2009, 97, 386–403. [Google Scholar]
- Shen, Y.; Win, M. On the accuracy of localization systems using wideband antenna arrays. IEEE Trans. Commun 2010, 58, 270–280. [Google Scholar]
- Gustafsson, F.; Gunnarsson, F.; Bergman, N.; Forssell, U.; Jansson, J.; Karlsson, R.; Nordlund, P.-J. Particle filters for positioning, navigation, and tracking. IEEE Trans. Signal Process 2002, 50, 425–437. [Google Scholar]
- Evennou, F.; Marx, F.; Novakov, E. Map-aided indoor mobile positioning system using particle filter. Proceedings of the IEEE Wireless Communications and Networking Conference, New Orleans, LA, USA, 13–17 March 2005; pp. 2490–2494.
- Yu, K.; Dutkiewicz, E. Improved kalman filtering algorithms for mobile tracking in nlos scenarios. Proceedings of the IEEE Wireless Communications and networking Conference (WCNC), Shanghai, China, 1–4 April 2012; pp. 2390–2394.
- Yun, X.; Bachmann, E. Design, implementation, and experimental results of a quaternion-based kalman filter for human body motion tracking. IEEE Trans. Robot 2006, 22, 1216–1277. [Google Scholar]
- Perala, T.; Piche, R. Robust extended kalman filtering in hybrid positioning applications. Proceedings of the 4th Workshop on Positioning, Navigation and Communication (WPNC'07), Hannover, Germany, 22 March 2007; pp. 55–63.
- Simon, D.; Simon, D.L. Kalman filtering with inequality constraints for Turbofan engine health estimation. IEE Proc. Control Theory Appl 2006, 153, 371–378. [Google Scholar]
- Porrill, J. Optimal combination and constraints for geometrical sensor data. Int. J. Robot. Res 1988, 7, 66–77. [Google Scholar]
- Alouani, A.; Blair, W. Use of a kinematic constraint in tracking constant speed, maneuvering targets. IEEE Trans. Autom. Control 1993, 38, 1107–1111. [Google Scholar]
- Wang, L.; Chiang, Y.; Chang, F. Filtering method for nonlinear systems with constraints. IEE Proc. Control Theory Appl 2002, 149, 525–531. [Google Scholar]
- Spong, M.; Hutchinson, S.; Vidyasagar, M. Robot Modeling and Control; John Wiley and Sons: New York, NY, USA, 2006. [Google Scholar]
- Simon, D.; Chia, T. Kalman filtering with state equality constraints. IEEE Trans. Aerosp. Electron. Syst 2002, 38, 128–136. [Google Scholar]
- Mhedhbi, M.; Laaraiedh, M.; Uguen, B. Constrained lmds technique for human motion and gesture estimation. Proceedings of the 9th Workshop on Positioning Navigation and Communication (WPNC), Dresden, Germany, 15–16 March 2012; pp. 89–93.
- Mekonnen, Z.; Slottke, E.; Luecken, H.; Steiner, C.; Wittneben, A. Constrained maximum likelihood positioning for uwb based human motion tracking. Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Zurich, Switzerland, 15–17 September 2010; pp. 1–10.
- Hamie, J.; Denis, B.; Richard, C. Constrained decentralized algorithm for the relative localization of wearable wireless sensor nodes. Proceedings of the IEEE Sensors, Taipei, Taiwan, 28–31 October 2012; pp. 1–4.
- Di Renzo, M.; Buehrer, R.; Torres, J. Pulse shape distortion and ranging accuracy in UWB-based body area networks for full-body motion capture and gait analysis. Proceedings of the IEEE Global Telecommunications Conference (GLOBECOM '07), Washington, DC, USA, 26–30 November 2007; pp. 3775–3780.
- Feng, X.; Liang, Y.; Zhou, L. Joint mode identification and localisation improvement of over-the-horizon radar with forward-based receivers. IET Radar Sonar Navig 2014, 8, 490–500. [Google Scholar]
- Lee, C.; Lee, H.-S.; Kim, J.-Y. Performance of a one-way ranging method for WBAN healthcare services. Proceedings of the 9th International Symposium on Communications and Information Technology (ISCIT 2009), Icheon, Korea, 28–30 September 2009.
- Everett, H., III; Generalized, Lagrange. multiplier method for solving problems of optimum allocation of resources. Oper. Res 1963, 11, 399–417. [Google Scholar]
- Feng, X.; Liang, Y.; Jiao, L. Converted Measurement Kalman filter with nonlinear equality constrains. Proceedings of the 15th International Conference on Information Fusion (FUSION), Singapore, 9–12 July 2012; pp. 1081–1086.
- Yang, C.; Blasch, E. Kalman filtering with nonlinear state constraints. IEEE Trans. Aerosp. Electron. Syst 2009, 45, 70–84. [Google Scholar]
- Naidu, V.; Raol, J.R. Performance evaluation of interacting multiple model kalman filter. IETE J. Educ 2008, 49, 95–108. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| x position (m) | 2.3 | 2 | 2.2 | 2.1 |
| x velocity (m/s) | 0.3464 | 0.3464 | 0.3464 | 0.3464 |
| y position (m) | 10 | 10 | 10 | 10 |
| y velocity (m/s) | 0.2 | 0.2 | 0.2 | 0.2 |
| z position (m) | 0.8 | 0.7 | 0.8 | 1 |
| z velocity (m/s) | 0 | 0 | 0 | 0 |
| Index | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| 1 | – | 0.3162m | 0.1m | 0.2828m |
| 2 | 0.3162m | – | 0.2236m | 0.3162m |
| 3 | 0.1m | 0.2236m | – | 0.2236m |
| 4 | 0.2828m | 0.3162m | 0.2236m | – |
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Feng, X.; Snoussi, H.; Liang, Y.; Jiao, L. Constrained State Estimation for Individual Localization in Wireless Body Sensor Networks. Sensors 2014, 14, 21195-21212. https://doi.org/10.3390/s141121195
Feng X, Snoussi H, Liang Y, Jiao L. Constrained State Estimation for Individual Localization in Wireless Body Sensor Networks. Sensors. 2014; 14(11):21195-21212. https://doi.org/10.3390/s141121195
Chicago/Turabian StyleFeng, Xiaoxue, Hichem Snoussi, Yan Liang, and Lianmeng Jiao. 2014. "Constrained State Estimation for Individual Localization in Wireless Body Sensor Networks" Sensors 14, no. 11: 21195-21212. https://doi.org/10.3390/s141121195