The Role of Exploratory Conditions in Bio-Inspired Tactile Sensing of Single Topogical Features

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
: We investigate the mechanism of tactile transduction during active exploration of finely textured surfaces using a tactile sensor mimicking the human fingertip. We focus in particular on the role of exploratory conditions in shaping the subcutaneous mechanical signals. The sensor has been designed by integrating a linear array of MEMS micro-force sensors in an elastomer layer. We measure the response of the sensors to the passage of elementary topographical features at constant velocity and normal load, such as a small hole on a flat substrate. Each sensor’s response is found to strongly depend on its relative location with respect to the substrate/skin contact zone, a result which can be quantitatively understood within the scope of a linear model of tactile transduction. The modification of the response induced by varying other parameters, such as the thickness of the elastic layer and the confining load, are also correctly captured by this model. We further demonstrate that the knowledge of these characteristic responses allows one to dynamically evaluate the position of a small hole within the contact zone, based on the micro-force sensors signals, with a spatial resolution an order of magnitude better than the intrinsic resolution of individual sensors. Consequences of these observations on robotic tactile sensing are briefly discussed.1. Introduction
The human hand is an extraordinary tool which cannot be matched by any existing robotic device. It allows us both to manipulate objects with extreme precision and to extract a wealth of information such as their shape, weight, temperature and surface texture [1,2]. These capabilities owe for a large part to the cutaneous tactile sensitivity of hands that provide information regarding the forces acting on the skin. Tactile perception is mediated by specialized nerve endings (mechanoreceptors) located in the first layers of the derma. The tactile information, contained in the sequence of spikes traveling up the afferent fibers, is processed by the central nervous system to assess various physical characteristics of the probed objects such as its curvature, overall shape, temperature. Tactile perception informs about the regions of contact, the relative skin/object motion within this contact, and the direction and intensity of the interfacial forces. This information is essential to texture discrimination, grasping tasks and precise manipulation of objects. When the sense of touch is artificially canceled, even if the other sensing modalities (such as vision) are maintained, the hand becomes clumsy [3].
The performance of the human hand has driven a large effort towards the design of skin-like sensors to incorporate tactile capabilities in humanoid robots. General designs are based on a biomimetic approach which consists in mimicking the human tactile organ by reproducing one or several of its characteristics. These range from the mechanical properties and topography of natural skin to the sensitivity, frequency bandwidths, localization and density of the various mechanoreceptors. Different types of designs have been implemented up to now and a review can be found in [4]. One can find large-area thin film devices which measure one single component of the stress field (mostly the pressure) with a relatively high sensitivity but a low spatial resolution except for some very recent designs [5–8]. Such “e-skins” (electronic skins) have the advantage of being rather flexible so they can be wrapped around robotic arms for instance. One can also find systems in which one or several discrete measuring units are used as mechanoreceptors equivalent and are distributed within an elastic material. Such units range from strain gauges to piezoelectric-electric components such as PVDF films and piezo-resistive elements [9–13]. More recently, Micro-Electro-Mechanical Systems (MEMS) micro-force sensors have been increasingly used as they allow simultaneous measurements of both pressure and shear components with an enhanced sensitivity and a highly linear and hysteresis-free output [14–18]. Still, the design of large-area, highly flexible, mechanically robust and cost-effective MEMS device remains challenging.
Beyond these technological issues, efforts are still needed to establish signal processing and tactile encoding schemes that would enable one to extract the relevant information from the measured force signals. Following Dahiya et al. classification [4], one can distinguish two types of tasks assigned to robotic tactile sensing, referred to as “perception for action” and “action for perception”. The first case refers to situations where tactile sensing aims at providing information on the interaction between the sensor and the object, such as the existence of slippage or rolling motion, the location of the contacting area, the direction and amplitude of the contacting forces, in order to safely manipulate the object. The signal processing should therefore produce an output which does not depend crucially on the physical properties of the object. In the second situation, tactile sensing aims at assessing object properties by active exploration. In human sensing, it has long been recognized that individuals usually adopt stereotyped patterns of interaction between the hand and the object, known as “exploratory procedure”, whose characteristics depend on the type of information sought for [19–21]. Within a given exploratory procedure however, the mechanical conditions experienced by the various mechanoreceptors are expected to greatly vary. A fundamental question thus arise to how the sensing system manage, in spite of this inevitable variability of the exploratory conditions, to produce an output that only depends on the intrinsic properties of the touched object.
In both situations, the raw response of the sensors depends on many parameters, some of which being directly related to the physical properties of the object whereas others being contextual (i.e., dependent on the way the object is touched). The challenge is to consistently extract some of these parameters without a complete knowledge of the others. As an illustration of this problem, let’s imagine a robotic device whose task is to lift an object with the minimal squeezing force. If one knows the friction coefficient of the skin/object interface and its weight, then it is easy to set the minimal force. If such properties are unknown, the applied force will have to be dynamically adjusted based on the detection of interfacial slip.
Here we focus on the reverse problem, i.e., how to precisely extract physical characteristics of the probed surface based on the sole output of embedded micro-force sensors. For that purpose, we study, experimentally and theoretically, how the responses of subcutaneous force sensors scanned quasi-statically (low velocity) across a micro-textured surface, depend on the exploratory conditions. The paper is organized as follows. In part 2, we describe a novel bio-inspired tactile sensor designed by integrating a linear array of 10 MEMS micro-force sensors in a millimeter thick elastomer layer. The calibration of the individual sensors by point-like indentation of the skin surface as well as the experimental set-up are detailed. In part 3, the response of the sensors to perfectly smooth surfaces in both static and frictional conditions is studied. A linear model of mechanical transduction is introduced to interpret the observed stress profiles. In part 4, the sensors’ responses to the passage of elementary topographical features on a flat substrate is measured. We examine how these responses vary with (i) the sensors’ location within the substrate/skin contact zone, (ii) the skin thickness and (iii) the normal applied force. The role of these exploratory conditions is discussed within the framework of the linear model presented before. Based on these results, in part 5, a signal processing scheme is proposed which returns the location of elementary surface defects within the contact zone. We show how the use of multiple sensors increases the spatial resolution of the tactile device well beyond the intrinsic resolution of individual sensors (hyperacuity). In part 6, the impact of this study on robotic tactile sensing and future works are discussed.
2. Bio-Inspired Fingertip Design and Calibration
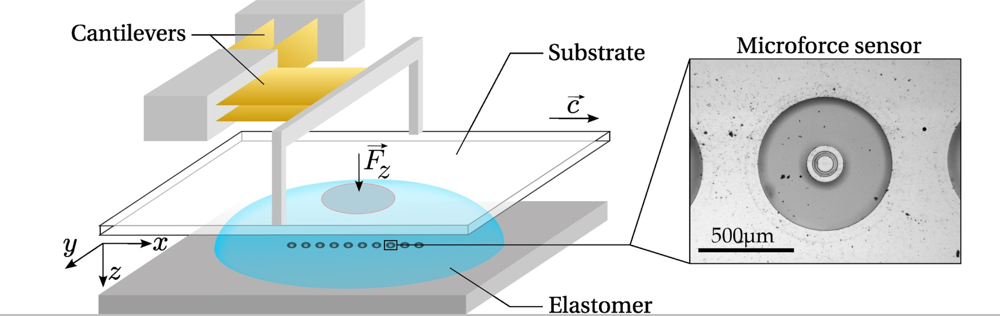
The bio-inspired tactile sensor used in this study consists of a 10 mm long linear array of 10 individual MEMS micro-force sensors embedded in a spherical elastomer cap mimicking the derma-epiderma (Figure 1). The sensitive part of each micro-force sensor consists of a vertical silicon cylinder (of diameter 100 μm and height 400 μm) attached to a circular silicon membrane (radius 350 μm, thickness 10 μm) suspended on its perimeter (Figure 1, Right). The membrane bears 4 pairs of piezoresistive gauges that give access to its internal stress state, from which one can extract the force acting on the cylinder. Once covered with an elastic layer, it allows for the measurement of the three components of the subcutaneous stress in a region of lateral extension of order 200 μm. Successive sensors are 1 mm apart and aligned along the x-axis, which is the scanning direction in dynamic sensing experiments. Sensors are numbered from left (①) to right (⑩) and a consistent color code is used in all figures, from blue to red.
The soft layer covering the sensors consists of an elastomer spherical cap with a large radius of curvature. This geometry yield an extended circular contact zone when put in contact with a flat surface. Two layer geometries were tested: a thick layer (maximum thickness h =3.04 mm, radius of curvature R =129.7 mm) and a thin layer (h =1.78 mm, R = 311.2 mm). Both were obtained by molding the liquid cross-linker/polymer melt prior to its cross-linking in a concave spherical lens whose surface has been finely abraded with a Silicon Carbide powder (The average size of abrasive grains is about 37 μm. The resulting surface has a microscopic rms roughness of about 1.28 μm whose main effect is to dramatically reduce the adhesive properties of the elastomer layer. Note that the current layer surface is not textured with fingerprint-like ridges whose effect has been discussed elsewhere [22–25]). The elastomer used here is a cross-linked PolyDiMethylSiloxane (PDMS) (The PDMS elastomer is prepared using a Sylgard 184-Dow Corning kit: dimethylvinylated and trimethylated silica are mixed with a curing agent (tetramethyltetravinylcyclotetrasiloxane) in a 10 : 1 mass ratio. Air bubbles are removed by a 5 min centrifugation at 3,000 rpm followed by exposure to a partial vacuum for a few hours. The liquid PDMS is then poured into the spherical mold, and cured at 70 °C for 48 h in an oven.) whose Young’s elastic modulus was measured to be approximately E =3 MPa and whose Poisson ratio was taken to be ν =0.5 as usually reported for this particular material.
Substrates to be scanned by the sensor, as well as the indentors used during the calibration procedure, are mounted on a three-axis motorized micro-positioning stage (micro-actuators, Newport, Inc.). A double-cantilever system combined with capacitive position sensors (MCC-30 and MCC-5, Fogale Nanotech) allows one to measure the total normal and tangential loads, respectively Fz and Fx, exerted on the tactile device (Figure 1, Left). In a typical experiment, the soft sensor is scanned at constant velocity c under a prescribed Fz, across smooth or patterned Plexiglas substrates.
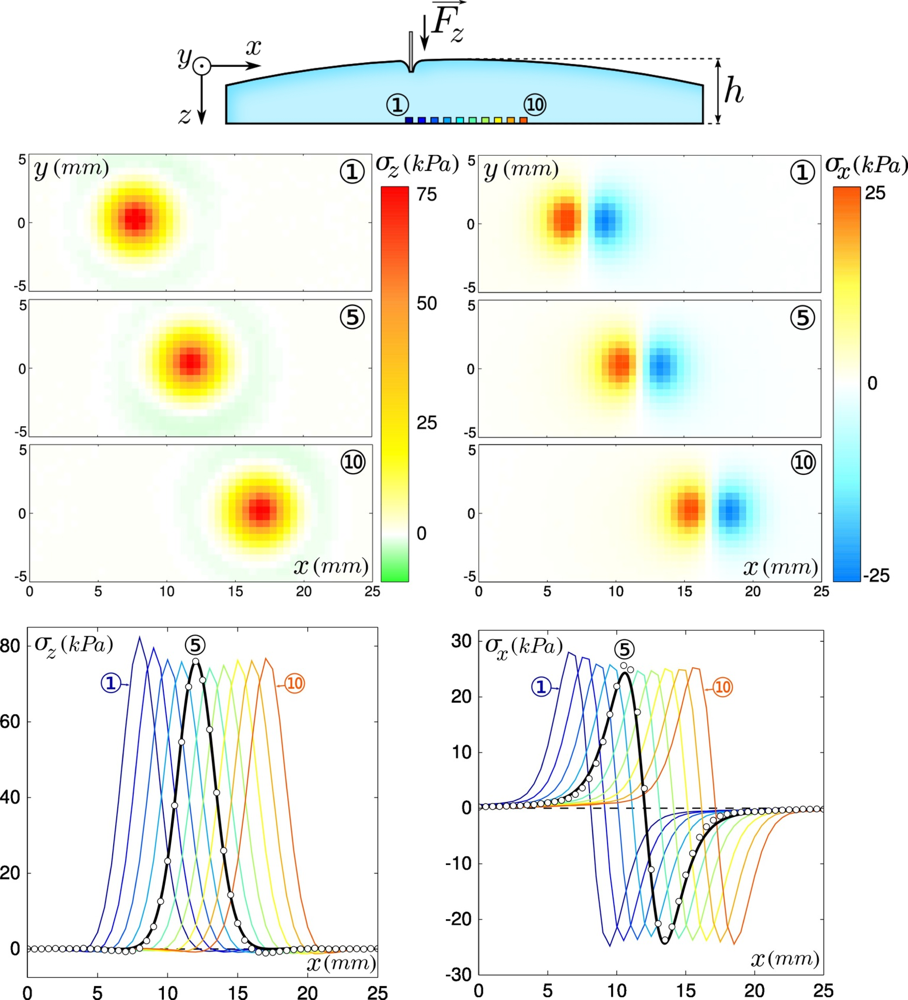
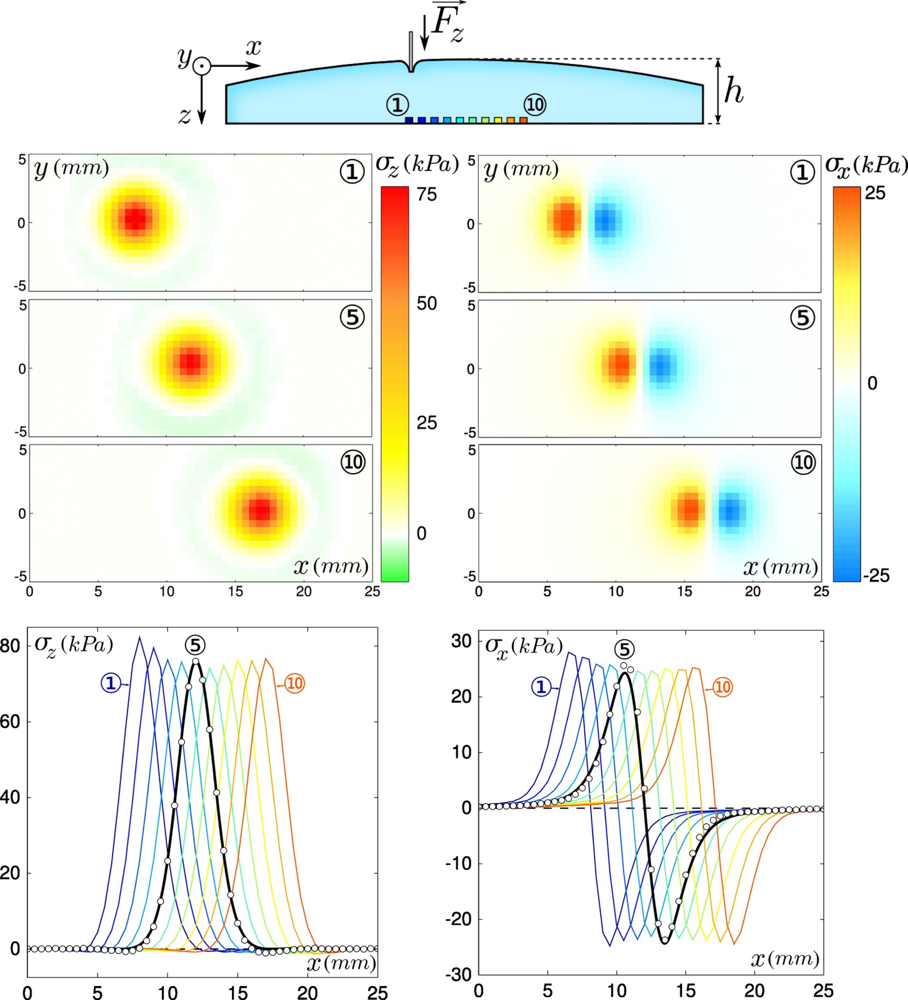
The tactile device is calibrated by applying a localized normal force at different locations on the soft layer’s surface, as depicted in the top sketch of Figure 2. A thin cylinder indentor (500 μm in diameter) is iteratively loaded normally to the elastomer surface up to a prescribed load Fz =0.4 N at every node of a 500 μm rectangular mesh covering the entire sensitive surface of the tactile device. Regardless of the indentor’s location, the micro-force sensors response varies linearly with the applied load. By analogy to the concept of receptive fields defined in neurophysiological experiments [26], we define the Intrinsic Receptive Field (IRF) of the sensor (In contrast with the exploratory receptive fields introduced in Section 4, which depend on the exploratory conditions.) as its spatial response to a localized indentation. Typical IRF’s are shown in the middle panel of Figure 2 for both the normal and tangential stress in response to a unit load (Fz =1 N) as a function of the (x, y) position of the indentor. These point-load response profiles are similar from one sensor to the next, and are centered on the sensor’s location. They are compared with the result of a Finite Elements simulation using CAST3M (CAST3M is an open source Finite Element simulation software developed at CEA, France. For additional information, see the link http://www-cast3m.cea.fr/cast3m/index.jsp. in 2D plane stress axisymmetric conditions. The stress field at the bottom of an elastic layer of finite thickness h rigidly attached to a solid plane is calculated as its surface is normally indented by a 500 μm flat cylindrical indentor. In the limit where the indentor diameter is much smaller than the layer thickness, the calculated stress field is similar to that obtained for a punctual indentor (the so-called Green function) and is a function of h only. As shown in the bottom panels of Figure 2, the measured and calculated response profiles can be correctly adjusted for both stress components. This adjustment provides a Volt-to-Pascal calibration for each micro-force sensor, as well as an estimated value of the thickness of the layer on top of each sensor. The latter is consistent with the geometry of the elastic cap since the layer thickness is found to vary continuously along the line of sensors with a maximal thickness of the layer located close to sensor ⑥. Such thickness variation can be clearly seen on Figure 2 through an inverse variation of the maxima of σz (corresponding to the point where the indentor lays right above the sensor).
3. Average Stress and Linear Model of Tactile Transduction
3.1. Stress Profiles Measurements
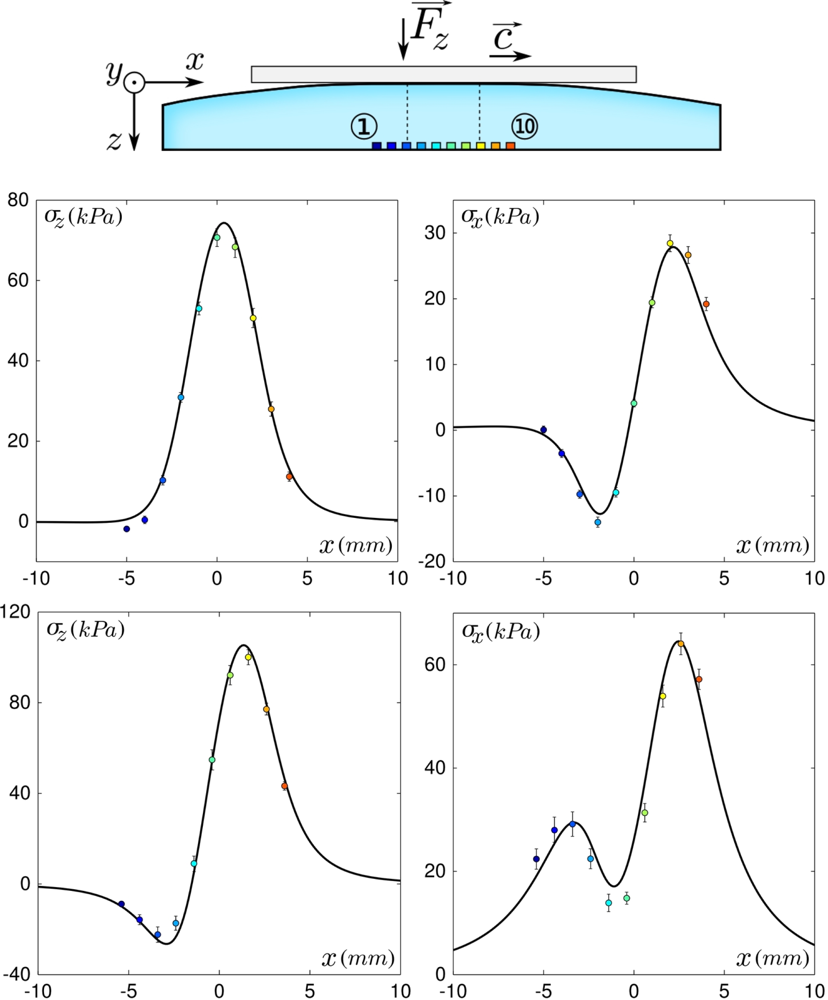
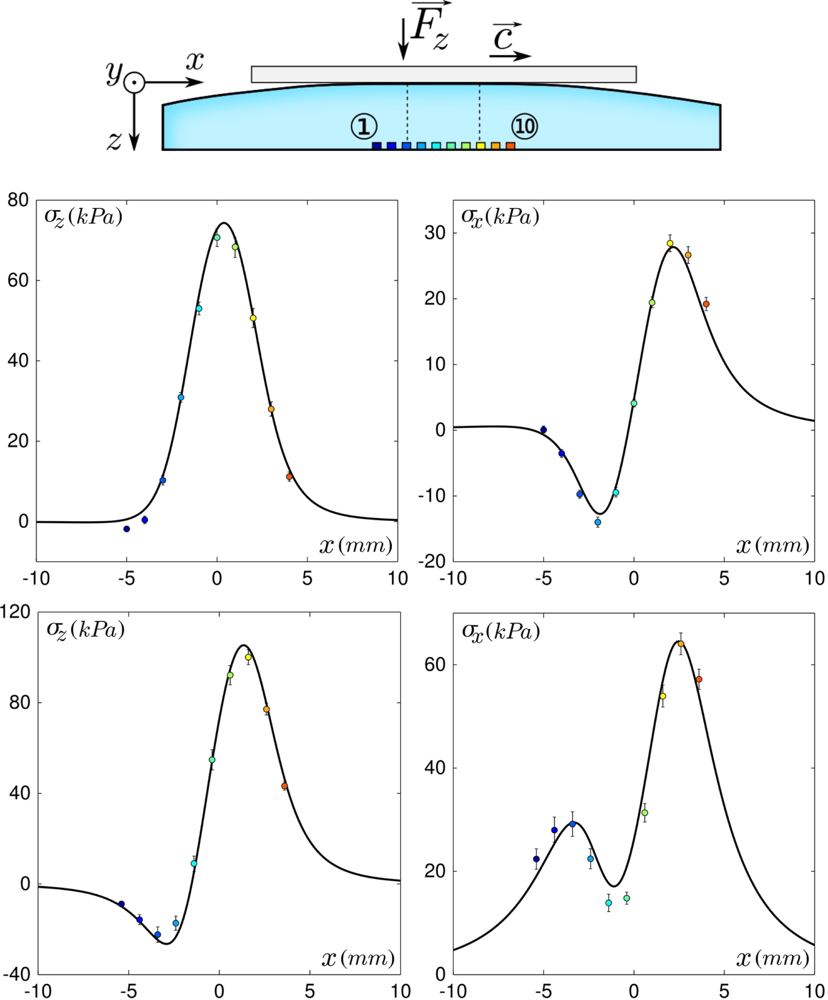
We first investigate the response of the sensing device to a smooth and flat Plexiglas substrate in both static and frictional conditions. The substrate is pressed over the device with a constant normal force Fz =0.8 N, forming a circular contact area of diameter 4–5 mm (see sketch on top of Figure 3). The interfacial contact stress field is centro-symmetric with respect to the center of the contact zone, the latter being roughly above sensor ⑥. In the lower plane where sensors are located, the normal and tangential stress fields σz and σx (middle panels of Figure 3), are respectively symmetric and antisymmetric with respect to the center of the contact zone. A slight asymmetry in the x-direction is however observed. This effect can be accounted for by the development of a minute tangential force during normal loading due to the double cantilever system. In comparison, the tangential stress field σy (not shown) is perfectly antisymmetric with respect to the x axis.
The substrate is then moved quasi-statically at constant velocity (c = 500 μ m/s) in the positive x direction (This velocity was chosen to avoid sensors breakage and skin wear. In natural physiological conditions, scanning velocities are typically in the cm/s range. However, at such velocities and for such a rigid system, the characteristic intrinsic frequencies are orders of magnitude larger than those elicited at the interface and in addition the friction coefficient for these types of materials exhibits a weak velocity dependence. One thus expects very little dynamical effects.). The average response of the micro-force sensors measured during steady sliding is shown on Figure 3, Bottom. The stress signals along the y axis (i.e., perpendicular to the direction of motion) contain very little additional physical information as compared to σx and σz, and will thus be discarded from the subsequent analysis. The steady state profiles significantly differ from their static counterparts due to the development of a tangential interfacial stress field in the contact zone.
3.2. Linear Model of Tactile Transduction
In order to interpret the subcutaneous stress profiles presented above, one first needs to calculate the stress field that develops between the elastic layer and the substrate during steady-state sliding. Unfortunately, there is no analytical solution to this mechanical problem in our confined geometry (although a solution has recently been proposed in a 2D equivalent configuration [27]). To circumvent this difficulty, we make the assumption that the normal stress field is unmodified by the application of a tangential force as would be the case in a semi-infinite configuration. Under this weakly restrictive hypotheses, an approximate semi-analytical solution can be derived whose three main ingredients are:
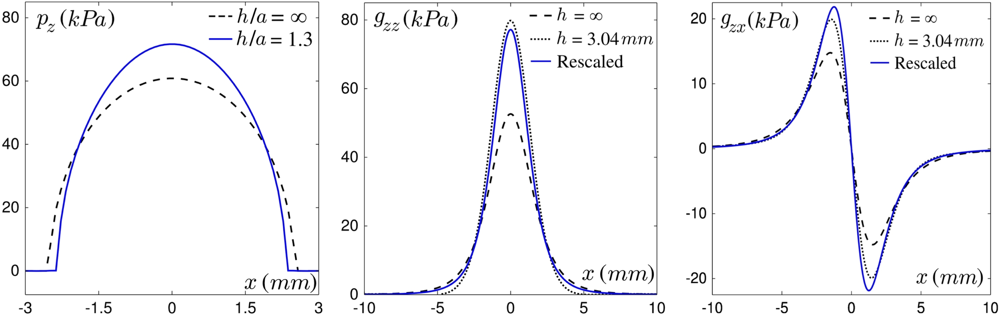
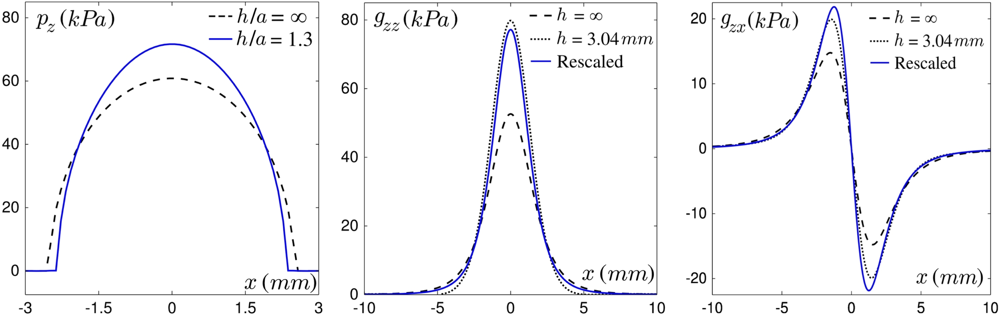
Interfacial pressure field: The interfacial pressure field at a sphere-on-plane contact is given by Hertz’ classical calculation [28]. This result is valid in the limit of infinite semi-elastic media, i.e., when the thickness of both objects is much larger than the contact radius. In our case, the latter is comparable with the elastic layer thickness. We therefore use a semi-analytical modified Hertz profile as recently proposed by Frétigny and Chateauminois [29]. As shown in Figure 4, Left, this corrected profile shows a 11% reduction in contact radius, associated with a 12% increase in maximum pressure.
Interfacial shear stress field: In steady sliding regime, we postulate that at each point within the contact zone the Amontons–Coulomb Law of friction is satisfied, i.e., that the local tangential stress and pressure are proportional, px = μd.pz, where the dynamic friction coefficient μd ≃ 3 is evaluated as the time-averaged ratio of the total tangential to normal forces Fx/Fz.
Stress propagation in the elastic media: Under linear elasticity and quasi-static hypothesis, the application of a force on the surface of an elastic material creates a bulk stress which is entirely set by the Green tensor g. The stress at point (x, y, z) in response to a force f⃗ applied at the origin (x =0, y =0, z =0) on the surface of the material is therefore given by g(x, y, z). f⃗. For a semi-infinite elastic medium the analytical solution of the Green tensor is known [28] but, again, this result has to be corrected to take into account the finite thickness of the elastic layer and its attachment to a rigid base. We have carried out a finite element simulation to obtain the stress profile generated by localized normal indentation (see Section 2). This calculation indicates that a reasonable approximation of the corrected Green tensor can be obtained with a simple rescaling of the semi-infinite solution by a numerical factor k while the spatial coordinates are rescaled by k−1/2 to ensure force conservation. Figure 4, Center shows the normal component gzz of the Green tensor for a semi-infinite (h = ∞, analytical) and a finite elastic layer (h =3.04 mm, Finite Elements calculation). The scaling of the semi-infinite solution with a factor k =1.48 is also displayed for comparison. The same factor also yields a correct approximation for the tangential component of the Green tensor gzx (see Figure 4, Right). We make the assumption that corrections to the other components of the Green tensor can be obtained with the same scaling.
These ingredients being established, the stress profiles along the sensors’ line can be obtained by convoluting the interfacial stress field with the Green tensor, so that it now reads
4. Response to Fine Topographical Features Scanned Across the Tactile Sensor: The Exploratory Receptive Field
4.1. Exploratory Receptive Fields
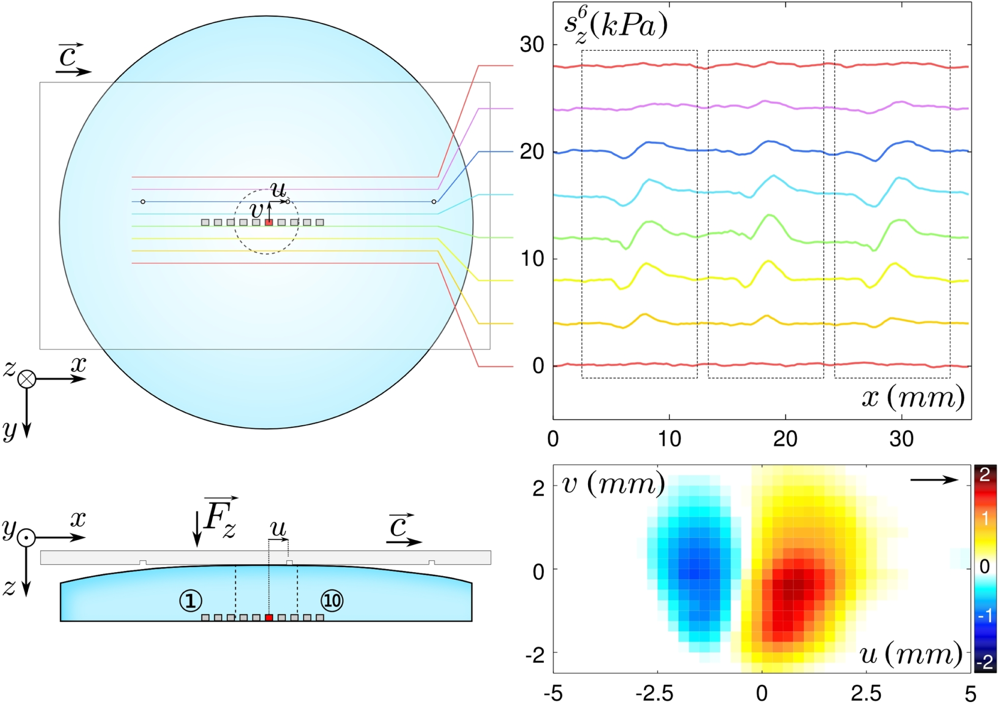
We now turn to the response of the tactile sensor to the passage of an elementary topographical defect on the substrate. The tactile sensor is scanned at constant velocity and confining force Fz across a flat surface bearing a line of discrete holes 500 μm in diameter and 1 mm in depth (The choice of using holes rather than bumps was dictated to both facilitate the fabrication of the substrates and the modelling. Upward bumps and downward holes impose different boundary conditions within the feature surface, namely a deformation for the former and a constant (zero) stress for the latter; The geometry is different from [30], since our aim here is to create a topological feature whose size is much smaller than that of the contact). Such an aspect ratio in the hole dimensions prevents the elastomer from contacting the bottom of the holes. Furthermore, the distance between neighboring holes was chosen to be larger than the contact zone diameter so that each hole produces an independent realization of the same mechanical stimulation. By scanning along adjacent parallel trajectories, one can explore the complete 2D response function associated with this elementary defect, for one given set of exploratory conditions.
A sketch of the experiment and the corresponding signals measured by a micro-force sensor are shown in Figure 5. Since the hole surface area is small compared to the contact zone area, its passage shows up as a small deviation from the base line (which correspond to the smooth substrate situation). These deviations remain however large with respect to the electro-mechanical noise of the sensor. We define the normal and shear responses and for each micro-force sensor i as the deviation of the normal and shear stress due to the presence of a defect located at position (u, v) at the interface
The spatial characteristics of the ERF can be quantitatively interpreted within the scope of the linear model of tactile transduction presented in the previous section. To a first approximation, one assumes that the presence of a small hole on the flat substrate locally cancels the normal and shear stress without modifying the Hertz-like stress field in the rest of the contact zone. Under such an assumption, the defect-induced stress variations measured by the micro-force sensors can be calculated analytically. As long as the defect’s surface remains small with respect to the contact zone area, the stress variations for a sensor i located at (xi, yi =0) writes:
4.2. The Role of Exploratory Conditions
As outlined in the introduction, the characteristics of tactile transduction depend not only on the intrinsic properties of the tactile sensor, but also on the mechanical conditions of the frictional interaction between the substrate and the sensing device. These conditions are controlled by several quantities: some of them are contextual (namely the global applied force and the skin/substrate contact location), some are intrinsic to the sensor (the skin radius of curvature and elastic moduli), and one is characteristic of the skin/substrate interfacial interaction (the friction coefficient). In this section, we systematically vary those different parameters and analyze how they affect the measured and calculated ERF’s.
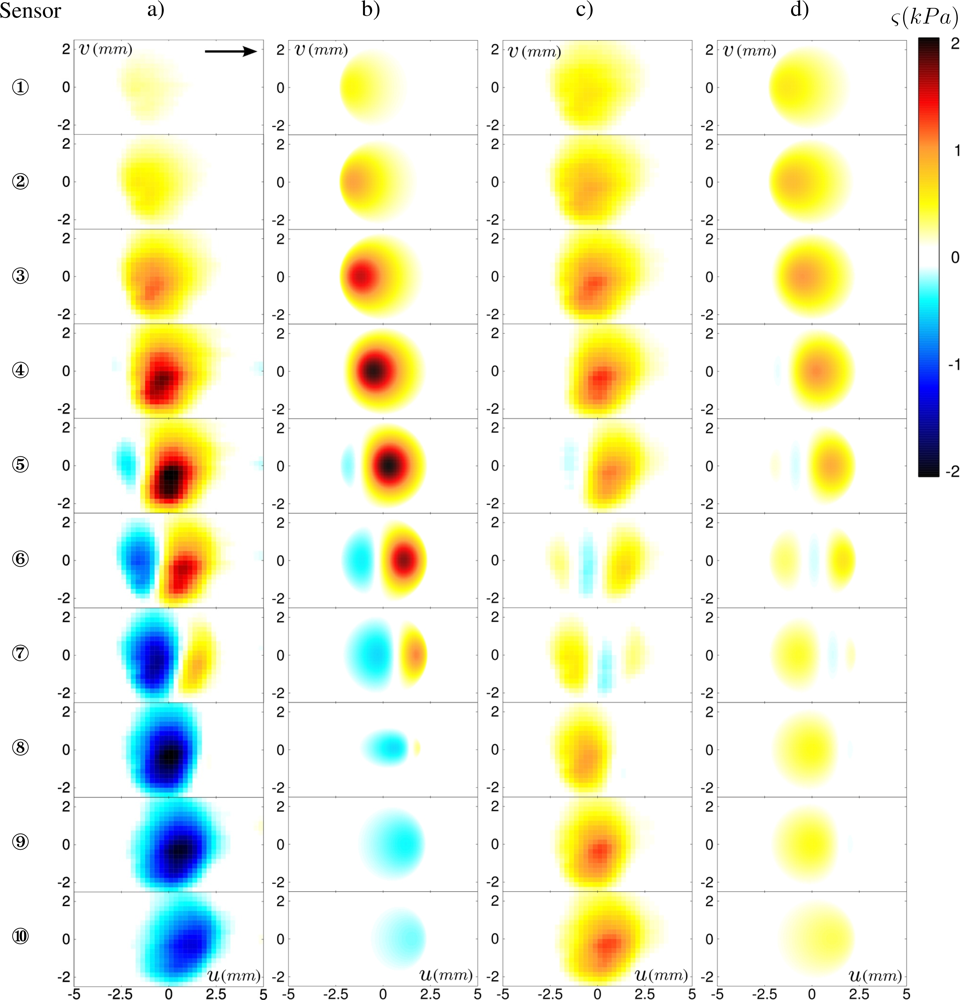
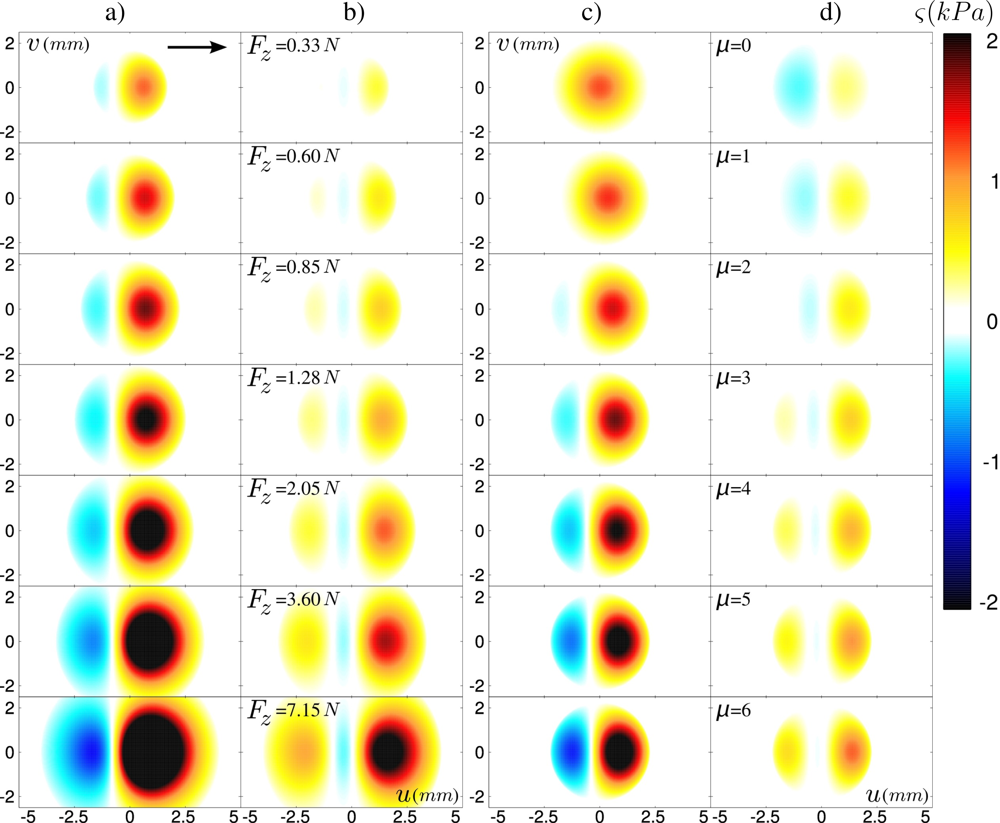
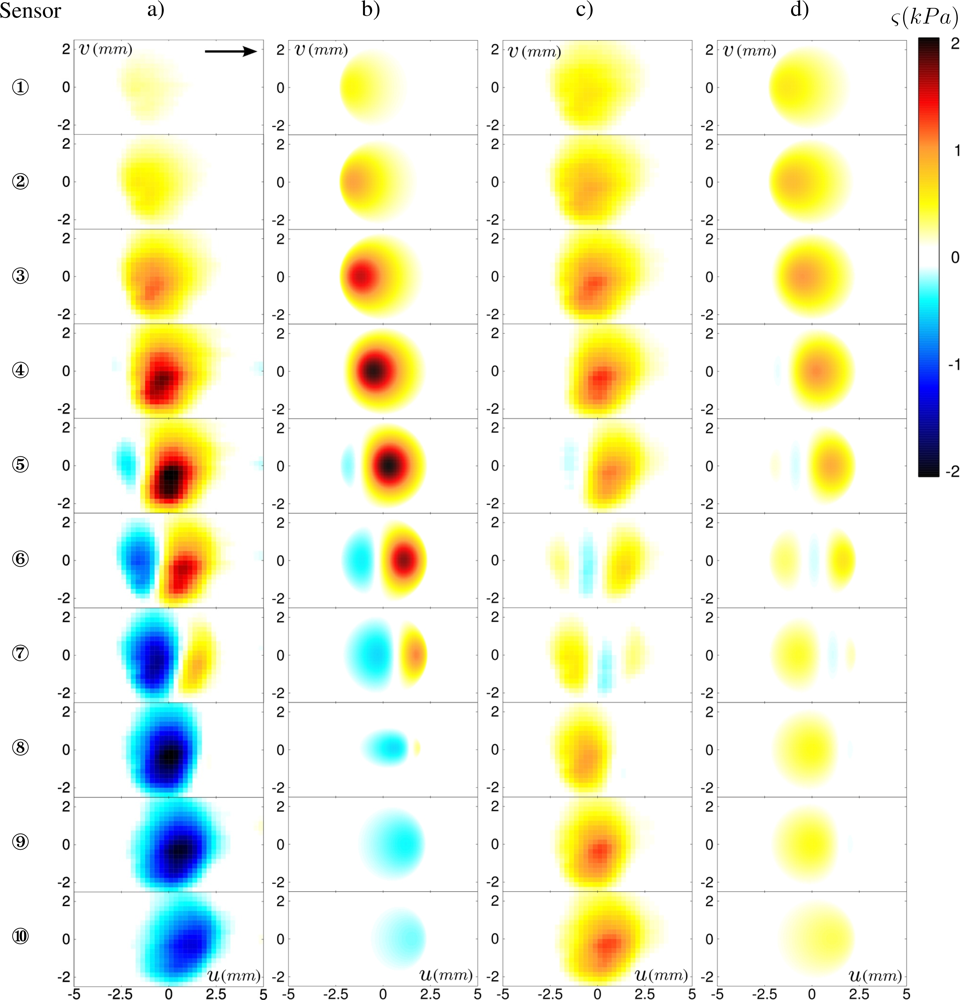
The first parameter we focus on is the position of the contact zone relative to the micro-force sensors location. Figure 6(a,c) shows the two-dimensional ERF’s for all 10 sensors for both stress components under a confining force Fz = 0.8 N. It appears that the passage of the small topographical feature produces a signature whose shape strongly depends on the precise location of the sensor. It is remarkable for instance that the normal ERF ςz(u, v) evolves from a positive spot for the most left-handed probing positions to a negative spot for the most right-handed ones. Note that the outmost sensors do respond to the defect’s passage although they lay outside of the contact zone.
The corresponding calculated profiles, displayed in Figure 6(b,d), correctly capture the spatial distribution experimentally observed for the ten sensors, as well as their amplitudes. There are however some discrepancies, in particular for the right-hand side sensors (from ⑥ to ⑩) whose amplitudes are systematically higher than expected both for the normal and shear stress. This may come from a coupling between tangential and normal stresses, ignored in our model: the friction-induced shear stress field produces a torque on the elastic layer which is balanced by a desymmetrization of the interfacial pressure profile (see [27] for a discussion of this effect in a cylinder/plane geometry).
This simple model captures the essential features of the position-dependence of the sensors’ response. It allows one in turn to interpret the origin of the observed variability in the ERF’s. Equation (1) shows that the signal measured by the sensor depends on the product of its intrinsic response function g by the time-averaged interfacial stress field (pz, px). In the sphere/plane geometry used in the experiments, the latter is given by Hertz calculation (Figure 4) which rapidly varies over the contact zone. As a result, the average stress field seen by a given sensor, and thus its ERF, is extremely sensitive to its exact location below the contact zone.
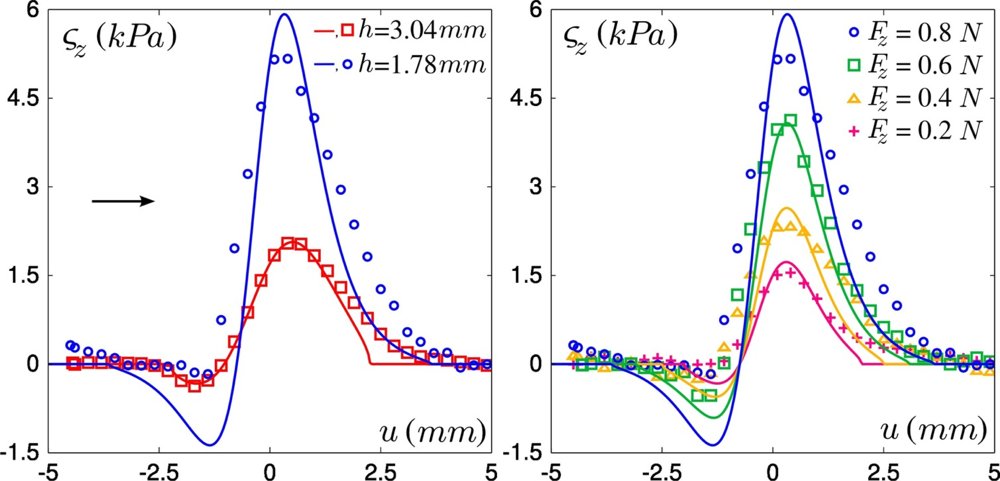
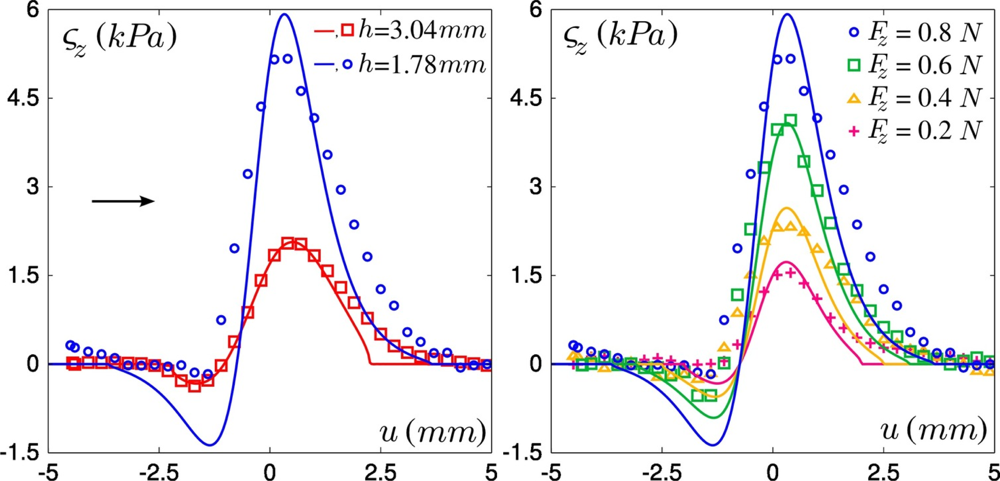
The use of two tactile devices with different layer thicknesses allows us to analyze the role of this geometrical parameter: in Figure 7, Left the recorded normal stress variations as the defect is scanned along the sensor mid-line are shown for one micro-force sensor located below the center of the contact zone, for both layers. With the thinner one, the response amplitudes are higher although the global shape of the responses is maintained. Increasing the normal applied force Fz from 0.2 to 0.8 N (see Figure 7, Right) similarly increases the stress amplitude, but also widens the profiles as the contact radius a is increased. Notice however that this parameter weakly modifies the global shape of the responses over our experimental range.
As can be seen on Figure 7, the dependence on the layer thickness and on the normal applied force are correctly captured by our model. It should be noticed however that the quality of the fit deteriorates when the thinner layer is used, e.g., in Figure 7, Left the positive peak is broadened and the amplitude of the negative peak is smaller than predicted. This may be accounted for by the narrower intrinsic receptive fields (IRF) of the thin-layer sensor, which results in a greater sensibility to short-scale details of the surface stress fields. Discrepancies between observed and calculated profiles may thus result from the crude approximation made when estimating the local modification of the interfacial stress field induced by the hole.
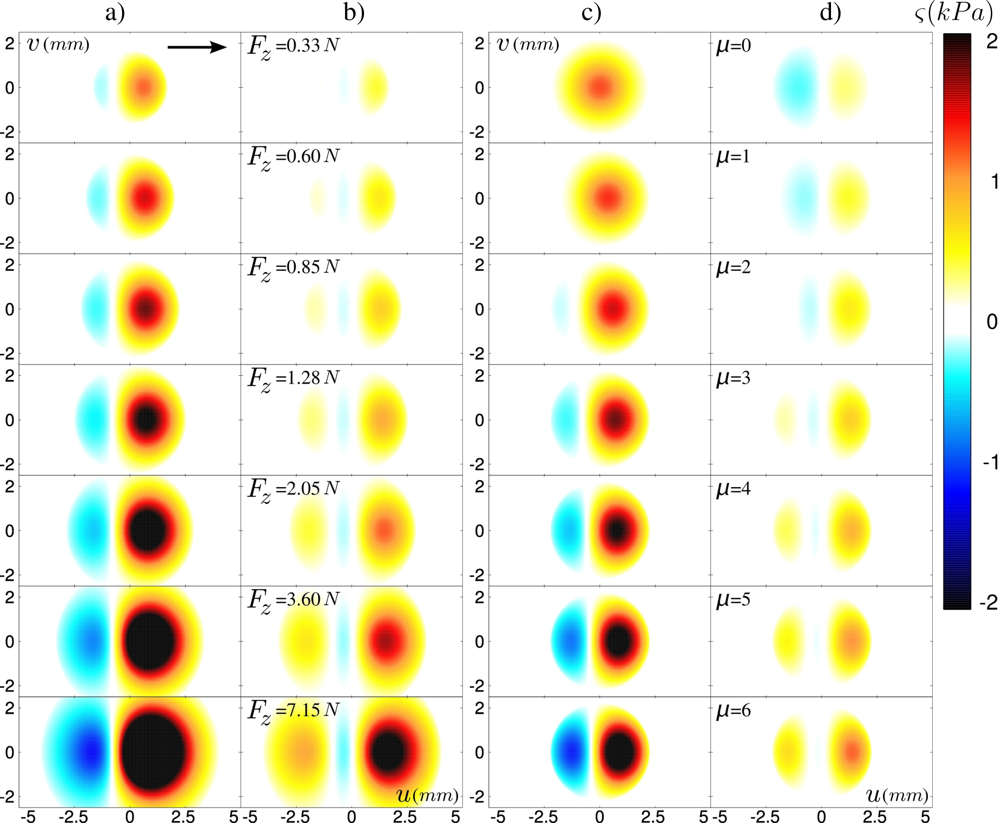
Altogether, these observations validate our model of tactile transduction. The latter can further be used to overcome some experimental limitations of our tactile device: the accessible range of normal load can be extended beyond the breakage limit of the micro-force sensors, and the dynamical friction coefficient can be varied. In Figure 8(a,b), the predicted ERF for both stress components are shown for a normal force 0.33 N < Fz < 7.15 N, a friction coefficient μd = 3 and a layer thickness of h =3.04 mm. The ERF’s are calculated for a sensor located at the center of the contact. This series of graphs corresponds to increasing values of the contact radius a from 0.75 h to 1.8 h. It appears that the increase of the applied force up to large values essentially maintains the shape of the response profile, except for a scaling factor given by the ratio a/h. It should be noted however that the modification of the ERF is more pronounced for sensors located at the edge of the contact (not shown). For those sensors, the main effect of increasing the contact area is to move the relative position of the sensor with respect to the contact zone. Figure 8(c,d) show how varying the dynamical friction coefficient μd in the 0–6 range modify the ERF of a centrally located sensor. In contrast to the normal applied force, an increase of the friction coefficient strongly affects the shape of the sensors’ response.
4.3. Discussion
In our device, the sensor base is much more rigid than its soft covering layer. This mechanical contrast complicates the calculation of both the IRF and the contact stress field. As a result, no exact scaling can be exhibited between the ERF and the various exploratory or mechanical parameters. It is therefore interesting to examine the dependence of the predicted ERF in the limit where the base and layer would have similar mechanical properties. In this case, one can show that the ERF can be written as:
This expression shows that, in this ideal situation, the ERF only depends on 3 independent parameters characterizing the exploratory conditions: F̃, μ and (x̃i, ỹi). Notice that the amplitude of the ERF increases non-linearly with the normal load and that this parameter also controls the width of the ERF. In practice, these three parameters can be extracted from the average stress profiles, like those presented in Figure 3.
The present model has been developed to account for finite-thickness elastic layers on top of a rigid plane as generally found for most robotic tactile sensors. In human skin, however, the receptors are embedded in soft tissues which can be reasonably described by a semi-infinite elastic medium. As shown in Figure 4, the finite-size effect of the elastic layer changes only marginally both the amplitude and lateral extension of the Hertz profiles and Green functions, suggesting that the results presented here should be of relevance also for e-skin devices and biological systems.
Moreover, such an approach opens possibilities of anticipating the ERF for a given set of exploratory parameters using either the model described above or machine learning techniques. Detection of fine textural features, such as individual topological defects, thus becomes conceivable by direct comparison with the measured signals.
5. Predicting the Defect’s Position
The Exploratory Receptive Fields (ERF) exhibited in the previous sections are characteristic responses of the sensors, for one given set of exploratory conditions, to the passage of an elementary surface defect. Under linear hypothesis, these fields entirely characterize the transduction of textural information from the substrate to the sensors array in this particular context of exploration. In addition of being useful building blocks for the understanding of more complex tactile inputs, the complete characterization of the ERFs for isolated defects is relevant for several practical situations, like Braille reading for instance. One may then ask how much information can be retrieved by inverting the problem, i.e., how precisely the position of the defect within the contact can be determined based on the sole signals delivered by the micro-force sensors.
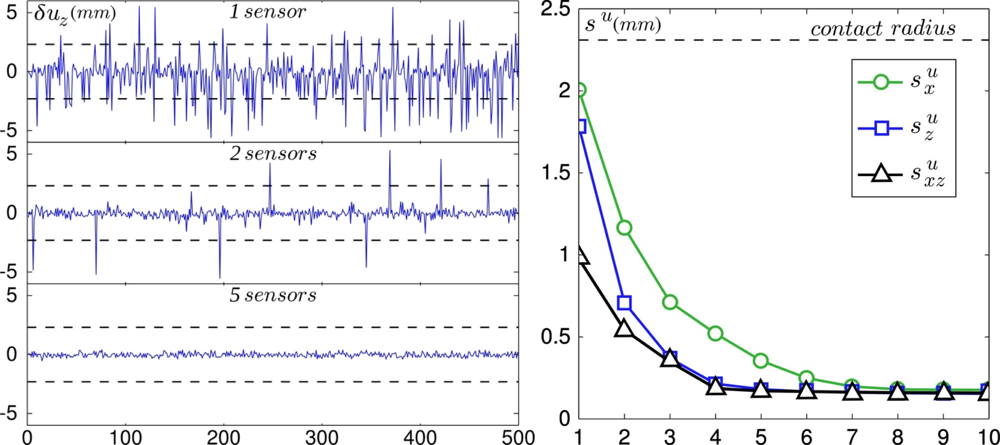
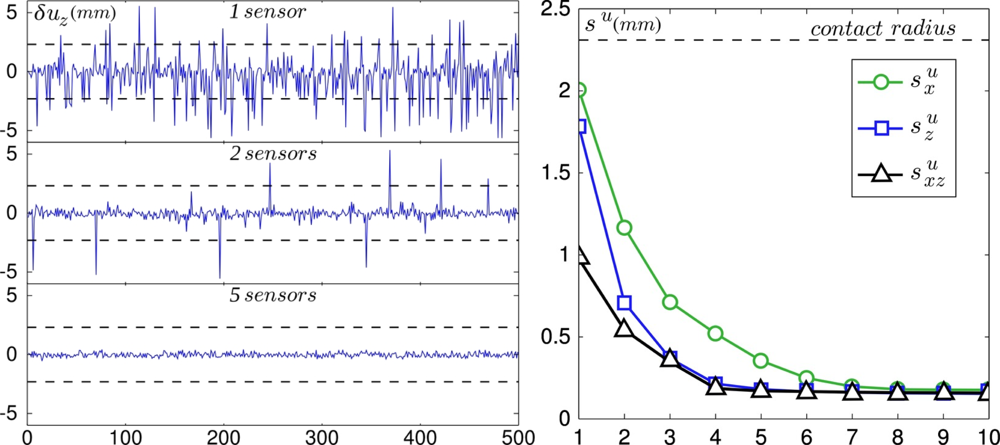
For simplicity, we focus on the prediction of the position u in the x-direction (which is both the axis of the linear array and the scanning direction) of defects scanned right above the sensors line. Our inversion procedure is based on the prior knowledge of the ERF: the averaged sensors’ response to the passage of 14 holes yields characteristic subcutaneous stress variation profiles ς̃i (u) for any position u of the hole. From this, we can now estimate the position of the hole for a given realization by evaluating the value of u that minimizes the following quantity
This graph calls for several comments. First, the spatial resolution obtained with a single sensor is of order 1–2 mm, which corresponds to the width of the IRF, i.e., the intrinsic spatial resolution of individual sensors directly related to the thickness of the overlying elastomer layer. Second, the resolution length rapidly decays as the number of sensors (or equivalently the number of components) used in the inversion procedure is increased and asymptotically reaches a minimum of order 150 μm when the total number of components reaches 5. Note that this value is an order of magnitude smaller than the intrinsic resolution length of each sensor, a situation classically referred to as hyperacuity. Finally, the normal component appears to be more efficient than the shear component in this inversion procedure as indicated by the fact that the resolution obtained using the normal component alone is systematically better than the one obtained using the shear component.
6. Conclusions
The work presented in this paper aimed at clarifying how the response of a tactile sensor scanned across a textured surface depends on the characteristics of the exploration procedure. In a typical bio-inspired tactile device, the responses of the embedded sensors to a localized indentation on the surface are similar from one to the next. These so-called IRFs are entirely controlled by the elastic layer’s thickness. However, the sensors’ response to the passage of a textural feature appears to strongly depend on their exact location within the skin/surface contact zone. This effect was evidenced by measuring the Exploratory Receptive Field of each sensor defined as its spatial response to the passage of a unique small feature (a circular hole) on the surface. A linear model of tactile transduction allowed us to correctly predict the form of these ERF based on the knowledge of the sensors’ IRF as well as on a few contextual parameters, namely the location of the sensor with respect to the contact zone, the applied normal load and the dynamic friction coefficient. This model allowed us to discuss the effect of each of these parameters in shaping the ERF.
This result has important consequences for robotic tactile sensing. In order to consistently retrieve textural information from the stress signals measured with an embedded sensor, one needs to know how to relate the topographical properties of the scanned surface with the measured signals. The present work indicates that this operation cannot be implemented based on the sole knowledge of the intrinsic properties of the sensor. In a structured environment, i.e., when the exploratory conditions are perfectly controlled and stable, one may obtain these responses empirically by measuring the sensors’ response to isolated defects. This approach, used in Section 5, allowed us to retrieve the instantaneous position of a small defect with a much higher resolution than the intrinsic resolution of the individual micro-force sensors. In a non-controlled environment however, a different approach is needed. In this context, the linear model detailed in this paper could be useful since it allows one to predict the form of the ERF based on a few contextual parameters. The latter could be obtained dynamically by analyzing the low frequency force signals whose spatial dependence are characteristics of the averaged surface stress field (see Figure 3).
The dependence of the sensors’ response to exploratory conditions obviously complicates the inversion task. However, one may argue that it could ultimately be beneficial to the efficiency of the tactile system. For a given set of exploratory conditions, each sensor is associated with a specific spatial response and is thus sensitive to a particular type of textural features. By actively varying the exploratory procedures, one may actually tune these response functions in order to extract more detailed information on the surface. This strategy may actually exist in human tactile sensing where the exploratory procedures are known to be function of the type of information one seeks to obtain and on the physical characteristics of the probed object [19–21].
This study was limited to the response to small isolated defects. It has relevance for comparisons with neurophysiological measurements for which the ERF have been measured via reverse correlation techniques [31–33]. In more complex situations, typically when several defects lay within the contact zone, elastic interactions between the defects should be taken into account. This work should therefore be considered as a first step towards an analytical understanding of interfacial transduction of texture information.
Acknowledgments
The authors would like to thank A. Chateauminois for the computation of the modified Hertz stress field, J. Scheibert and J. Frelat for their help on the finite element simulation and P. Rey for design and fabrication of the MEMS linear arrays. This work was supported by ANR TRANSTACT.
References
- Hollins, M. Somesthetic senses. Annu. Rev. Psychol 2010, 61, 243–271. [Google Scholar]
- Johansson, R; Flanagan, J. Coding and use of tactile signals from the fingertips in object manipulation tasks. Nat. Rev. Neurosci 2009, 10, 345–59. [Google Scholar]
- Westling, G; Johannson, RS. Factors influencing the force control during precision grip. Exp. Brain Res 1984, 53, 277–284. [Google Scholar]
- Dahiya, RS; Metta, G; Valle, M; Sandini, G. Tactile sensing—From humans to humanoids. IEEE Trans. Rob 2010, 26, 1–20. [Google Scholar]
- Maheshwari, V; Saraf, RF. High-resolution thin-film device to sense texture by touch. Science 2006, 312, 1501–1504. [Google Scholar]
- Someya, T; Sekitani, T; Iba, S; Kato, Y; Kawaguchi, H; Sakurai, T. A large-area, flexible pressure sensor matrix with organic field-effect transistors for artificial skin applications. Proc. Natl. Acad. Sci. USA 2004, 101, 9966–9970. [Google Scholar]
- Mannsfeld, SCB; Tee, BCK; Stoltenberg, RM; Chen, CVHH; Barman, S; Muir, BVO; Sokolov, AN; Reese, C; Bao, Z. Highly sensitive flexible pressure sensors with microstructured rubber dielectric layers. Nat. Mater 2010, 9, 859–864. [Google Scholar]
- Takei, K; Takahashi, T; Ho, JC; Ko, H; Gillies, AG; Leu, PW; Fearing, RS; Javey, A. Nanowire active-matrix circuitry for low-voltage macroscale artificial skin. Nat. Mater 2010, 9, 821–826. [Google Scholar]
- Cutkosky, R; Howe, M. Dynamic tactile sensing: perception of fine surface features with stress rate sensing. IEEE Trans. Rob. Autom 1993, 9, 140–151. [Google Scholar]
- Tanaka, M; Leveque, J; Tagami, H; Kikuchi, K; Chonan, S. The “haptic finger”—A new device for monitoring skin condition. Skin Res. Technol 2003, 9, 131–136. [Google Scholar]
- Mukaibo, Y; Shirado, H; Konyo, M; Maeno, T. Development of a Texture Sensor Emulating the Tissue Structure and Perceptual Mechanism of Human Fingers. Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 2565–2570.
- Hosoda, K; Tada, Y; Asada, M. Anthropomorphic robotic soft fingertip with randomly distributed receptors. Robot. Auton. Syst 2006, 54, 104–109. [Google Scholar]
- Wettels, N; Santos, V; Johansson, R; Loeb, G. Biomimetic tactile sensor array. Adv. Rob 2008, 22, 829–849. [Google Scholar]
- Beccai, L; Roccella, S; Arena, A; Valvo, F; Valdastri, P; Menciassi, A; Carrozza, MC; Dario, P. Design and fabrication of a hybrid silicon three-axial force sensor for biomechanical applications. Sens. Actuat. A 2005, 120, 370–382. [Google Scholar]
- Edin, B; Beccai, L; Ascari, L; Roccella, S; Cabibihan, J; Carrozza, M. Bio-Inspired Approach for the Design and Characterization of a Tactile Sensory System for a Cybernetic Prosthetic Hand. Proceedings of the 2006 IEEE International Conference on Robotics and Automation, ICRA 2006, Orlando, FL, USA, 15–19 May 2006; pp. 1354–1358.
- Beccai, L; Roccella, S; Ascari, L; Valdastri, P; Sieber, A; Carrozza, M; Dario, P. Development and experimental analysis of a soft compliant tactile microsensor for anthropomorphic artificial hand. IEEE/ASME Trans. Mechatron 2008, 13, 158–168. [Google Scholar]
- Vásárhelyi, G; Adam, M; Vazsonyi, E; Vizvary, Z; Kis, A; Barsony, I; Ducso, C. Characterization of an integrable single-crystalline 3-D tactile sensor. IEEE Sens. J 2006, 6, 928–934. [Google Scholar]
- Oddo, CM; Beccai, L; Felder, M; Giovacchini, F; Carrozza, MC. Artificial roughness encoding with a bio-inspired mems-based tactile sensor array. Sensors 2009, 9, 3161–3183. [Google Scholar]
- Klatzky, R; Lederman, S. Hand movements: A window into haptic object recognition. Cognit. Psychol 1987, 19, 342–368. [Google Scholar]
- Klatzky, R; Lederman, S; Pellegrino, J; Doherty, S; McClosky, B. Procedures for haptic object exploration vs manipulation. In Vision and Action: The Control of Grasping; Goodale, M, Ed.; Ablex: New York, NY, USA, 1990; pp. 110–127. [Google Scholar]
- Lederman, S; Klatzky, R. Action for perception: Manual exploratory movements for haptically processing objects and their features. In Hand and Brain: The Neurophysiology and Psychology of Hand Movements; Academic Press: London, UK, 1996; pp. 431–446. [Google Scholar]
- Yamada, D; Maeno, T; Yamada, Y. Artificial finger skin having ridges and distributed tactile sensors used for grasp force control. J. Rob. Mechatronics 2002, 14, 140–146. [Google Scholar]
- Scheibert, J; Leurent, S; Prevost, A; Debregeas, G. The role of fingerprints in the coding of tactile information probed with a biomimetic sensor. Science 2009, 323, 1503–1506. [Google Scholar]
- Oddo, CM; Beccai, L; Wessberg, J; Wasling, HB; Mattioli, F; Carrozza, MC. Roughness encoding in human and biomimetic artificial touch: Spatiotemporal frequency modulation and structural anisotropy of fingerprints. Sensors 2011, 11, 5596–5615. [Google Scholar]
- Wandersman, E; Candelier, R; Debregeas, G; Prevost, A. Texture-induced modulations of friction force: The fingerprint effect. Soft Condens Matter 2011. arXiv:1107.2578v1. [Google Scholar]
- Johansson, R. Tactile sensibility in human hand-receptive-field characteristics of mechanoreceptive units in glabrous skin area. J. Physiol 1978, 281, 101–123. [Google Scholar]
- Scheibert, J; Prevost, A; Debrégeas, G; Katzav, E; Adda-Bedia, M. Stress field at a sliding frictional contact: Experiments and calculations. J. Mech. Phys. Solids 2009, 57, 1921–1933. [Google Scholar]
- Johnson, KL. Contact Mechanics; Cambridge University Press: Cambridge, UK, 1985. [Google Scholar]
- Fretigny, C; Chateauminois, A. Solution for the elastic field in a layered medium under axisymmetric contact loading. J. Phys. D 2007, 40, 5418–5426. [Google Scholar]
- Levesque, V; Hayward, V. Experimental evidence of lateral skin strain during tactile exploration. Proceedings of Eurohaptics, Dublin, Ireland, July 2003; pp. 261–275.
- DiCarlo, JJ; Johnson, KO; Hsiao, SS. Structure of receptive fields in area 3b of primary somatosensory cortex in the alert monkey. J. Neurosci 1998, 18, 2626–2645. [Google Scholar]
- DiCarlo, JJ; Johnson, KO. Velocity invariance of receptive field structure in somatosensory cortical area 3b of the alert monkey. J. Neurosci 1999, 19, 401–419. [Google Scholar]
- DiCarlo, JJ; Johnson, KO. Spatial and temporal structure of receptive fields in primate somatosensory area 3b: Effects of stimulus scanning direction and orientation. J. Neurosci 2000, 20, 495–510. [Google Scholar]
© 2011 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Candelier, R.; Prevost, A.; Debrégeas, G. The Role of Exploratory Conditions in Bio-Inspired Tactile Sensing of Single Topogical Features. Sensors 2011, 11, 7934-7953. https://doi.org/10.3390/s110807934
Candelier R, Prevost A, Debrégeas G. The Role of Exploratory Conditions in Bio-Inspired Tactile Sensing of Single Topogical Features. Sensors. 2011; 11(8):7934-7953. https://doi.org/10.3390/s110807934
Chicago/Turabian StyleCandelier, Raphaël, Alexis Prevost, and Georges Debrégeas. 2011. "The Role of Exploratory Conditions in Bio-Inspired Tactile Sensing of Single Topogical Features" Sensors 11, no. 8: 7934-7953. https://doi.org/10.3390/s110807934