A Novel Sensor-Assisted RFID-Based Indoor Tracking System for the Elderly Living Alone

Abstract
: The population of elderly people is increasing rapidly in many developed nations. Providing safe and comfortable care to aging people is an important social goal. Moreover, obtaining correct activity and location information for an elderly person is an important research goal. This work proposes a novel intelligent RFID-based indoor tracking system for elderly people living alone. The proposed system uses environment information for inhabitants and received signal strength of an RFID reader to estimate the probable location of an inhabitant. The proposed system then coordinates with the wireless sensor node of a three-axis accelerometer and uses a genetic algorithm to compute the location of the inhabitant. The proposed system also uses context and gait information to improve inhabitant-tracking accuracy. Experiment results show that the accuracy of the proposed system is better than that of existing RFID-based systems.1. Introduction
Advances in medical treatment and health care have increased the population of elderly people in many nations. Many of these elderly people now live alone. However, their degenerating physical functions severely reduce their mobility. Additionally, providing timely care or treatment when indoor accidents occur is difficult. Thus, monitoring the physical location of elderly residents and the surrounding environment to prevent accidents is necessary [1–10]. Many researchers have attempted to achieve this goal by applying intelligent technologies, such as image surveillance, sound detection, or vibration sensing, to identify fall or trip hazards [11–16]. For instance, Zhou et al. tracked and identified elderly resident behavior using images [17]. Mukhopadhyay et al. created an environment equipped with sensors and robots for elderly care [18]. They monitored physiological signs and remotely monitored the surrounding environment of an elderly person to minimize risk. Using images is the easiest way to track and monitor the movements of elderly people. However, not all are willing to live under surveillance. Monitoring human daily life may invade personal privacy. Thus, an indoor tracking system that considers privacy, safety, and cost is needed.
Other sensors, such as pressure sensors, and radio frequency identification (RFID) are frequently used to detect the locations of inhabitants [19–24]. Various RFID-based localization and tracking methods have been developed [25]. Generally, RFID-based indoor localization methods are categorized as direct, distance, and hybrid measurement methods. Direct measurement directly locates an inhabitant’s position based on the existence or strength of sensor signals. The advantage of this method is that it does not require complex algorithms. However, highly accurate sensors are needed to locate an inhabitant’s position. For instance, Tesoriero et al. deployed passive RFID tags on a floor surface and used an RFID reader attached to a robot to detect the grid of tags representing a location unit [26]. Shiraishi et al. used a passive ultra-high-frequency (UHF) RFID system to locate the position of inhabitants [27]. Passive UHF tags were deployed in a grid pattern on a ceiling. Users carried RFID readers to receive signals from ceiling tags and to identify their approximate locations. Later, the clustering method and time-average clustering method were used to eliminate false tags and increase accuracy. Alippi et al. used several passive RFID readers deployed in an environment to detect the positions of inhabitants via tag signals [28]. Signal strength of passive RFID tags can vary with distance and angles between tags and readers. Using Bayesian theory, Alippi et al. located the probable positions and established a probability map for each passive RFID reader. These probability maps were then introduced to the passive RFID readers in an actual environment to identify the most probable location of a user. Jiang et al. developed a virtual route-tracking algorithm to track RFID tags and identify a resident’s path [29]. Virtual routes can determine tag paths based on the relationship between neighboring detected readers. Zah et al. designed a scout floor with embedded high-frequency and super-high-frequency RFID tags for location detection [30]. Users can carry RFID readers to locate and track the embedded tags under the floor based on the existence of signals. Distance measurement uses signal strength to determine the distance between readers and tags. Detection algorithms are then applied to identify inhabitant positions. For instance, Ni et al. developed a LANDMARC (location identification scheme based on dynamic active RFID calibration) system to detect tags in a room [31]. Several active RFID readers, reference tags, and unknown tags were deployed in a room. Euclidian distance was applied to compute differences in signal strength between reference tags and unknown tags. The k-nearest neighbor algorithm was used to search for k-reference tags with the shortest Euclidian distances. The location of the unknown tags was calculated from these reference tags. The major drawback of the LANDMARC scheme is that locations and number of readers and reference tags affect localization accuracy of unknown tags. Some researchers have improved the LANDMARC approach. For example, Jin et al. proposed a k effective reference tags algorithm to reduce LANDMARC calculation time [32]. The algorithm computes the Euclidean distance in the same manner as the LANDMARC scheme, and then selects k neighboring reference tags with the smallest weights from the area of reference tags. Finally, the approach uses triangulation to determine the average deviation of every three reference tags to find the final position. Zhao et al. proposed a new tracking method called virtual reference elimination [33]. This method uses known reference tags to establish virtual reference tags and eliminate excess readers and tags. Reference tags are deployed along a nine-patch pattern. A proximity map divides the entire sensing area into several regions, where each region represents the area of each virtual reference tag. Based on the Received Signal Strength Indication (RSSI) values of unknown tags, each reader approximates the possible regions of virtual tags and establishes its own proximity map to select the most probable map. Bekkali et al. used two active RFID readers and several active RFID tags as reference points to locate user positions [34]. The reference points and user signal strengths received by the two active RFID readers are converted into corresponding distances. The cosine law, triangulation, and a probability distribution function are applied to locate the positions of resident. Shih et al. deployed four active readers and several active tags along a grid pattern [35]. Four reference points nearest the tracking tags are spotted, and together form a square within which unknown tags are located. However, most of these LANDMARC-based approaches ignore interference in reader-to-reader, reader-to-tag, and tag-to-tag communication. In addition to using a single sensor type for localization, the hybrid measurement method uses several different sensor types to increase positioning accuracy. Yeh et al. installed a pressure sensor, ultrasound receivers, an accelerometer, a three-dimensional orientation sensor, and passive RFID readers on clogs to detect the paths and positions of a user [36]. The combination of these five devices improves localization accuracy. To further minimize detection errors, passive RFID tags are deployed in an environment, such that passive RFID readers can correct signals from tags.
However, most of these methods have problems. First, installing a large number of sensors is costly; the cost to install indoor cameras and pressure sensors is very high [25,37,38]. These devices cannot be applied to ordinary families, especially for the elderly people who live alone. Second, radio signals are adversely affected by interference and are not cost-effective. Additionally, microwave and UHF signals are susceptible to interference from water and metals. Furniture can also reduce location tracking accuracy. Third, attaching an RFID reader to an elderly person is not feasible for location tracking indoors. Finally, sensing range and the electromagnetic waves of RFID readers must be considered. Therefore, an RFID-based location system should have a limited number of sensors to locate positions cheaply and accurately. This work uses a novel sensor-assisted RFID system for indoor environments to locate elderly people living alone.
The proposed system comprises a wireless accelerometer, an active RFID reader with a signal strength function, and some RFID reference tags with environment data to identify the location of elderly people living alone. The proposed system also uses a genetic algorithm to search for the most probable intersection point in data. The wireless accelerometer determines whether a resident is walking. The RFID reader and reference tags estimate a resident’s position and identify walkable paths based on room layout. The system uses a small number of RFID reader and tags to reduce interference and deployment costs, and increases positioning accuracy by integrating contextual information and genetic operators.
The remainder of this paper is organized as follows. Section 2 introduces the proposed sensor-assisted RFID-based inhabitant tracking system. Section 3 discusses system simulation results. Section 4 presents discussions, conclusions, and directions for future work.
2. System Architecture
Figure 1 shows the architecture of the proposed sensor-assisted RFID-based indoor tracking system for elderly people living alone. The system has two modules: a data manager and positioning manager. The former filters out noise from sensor data, and determines the probable locations of a resident based on his/her current paths and number of steps. The latter calculates the actual location of residents using location information. The functionality of each module is discussed in the subsections that follow.
2.1. Data Manager
The data manager is responsible for signal filtering, walking path estimation, and counting walking steps. The data manager first uses moving average filtering to eliminate noise and smooth received signals. The moving average filter computes the average current sampling value in the sliding window, sums (2n + 1) the number of signals before and after current sampling point i, and then divides the summed value by number of signals sampled:
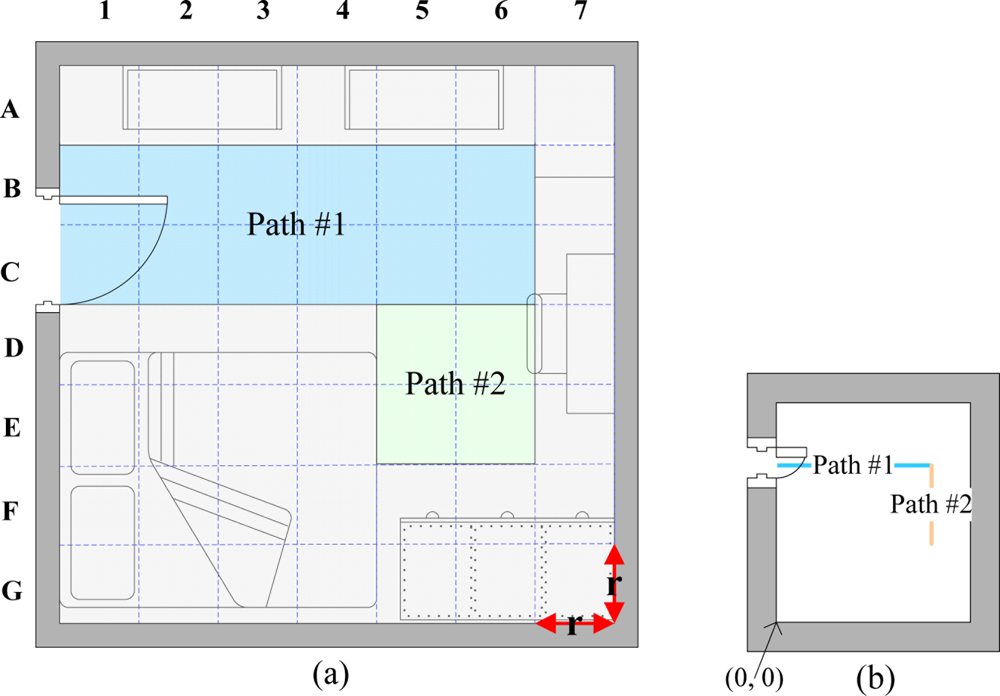
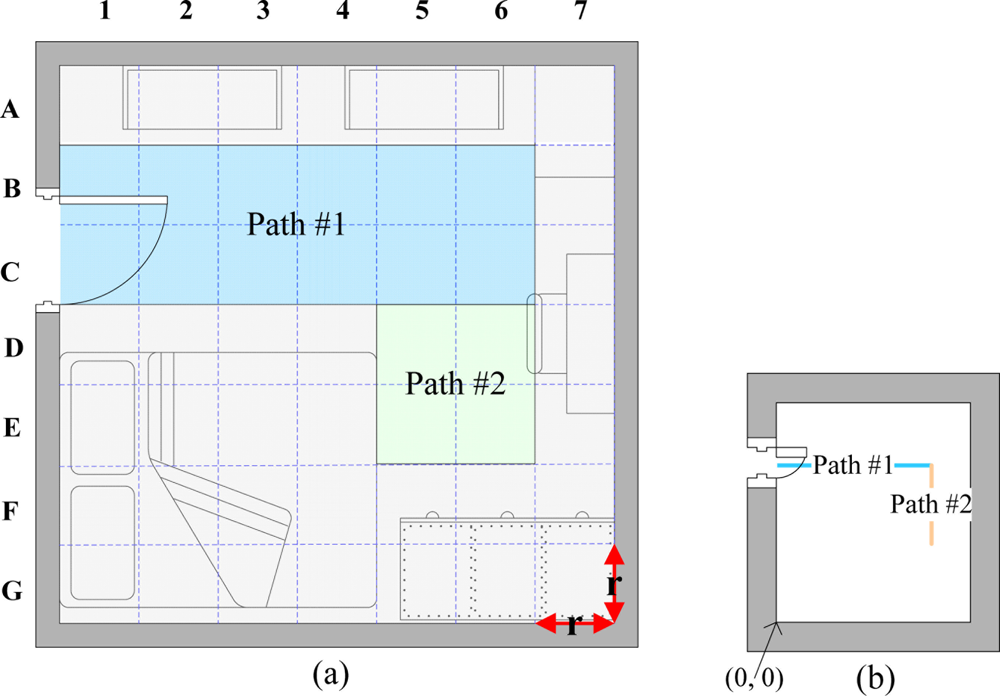
The walking path estimation is based on indoor layout and RFID data. Indoor layout encompasses the indoor activity space and defined occupied objects in the house, such as partitions, sofa, tables, chairs, and wardrobes. The activity space in a room is divided into square grids [Figure 2(a)]. The side length of each square is r units. Walking paths are composed of a number of square patterns. Straight lines are walkable paths [Figure 2(b)]. The size of a path in the figure is minaturized using the scale of 1/2r. Notably, the linear equations for paths 1 and 2 are:
The step movement uses an accelerometer to determine whether a user has taken a step:
2.2. Positioning Manager
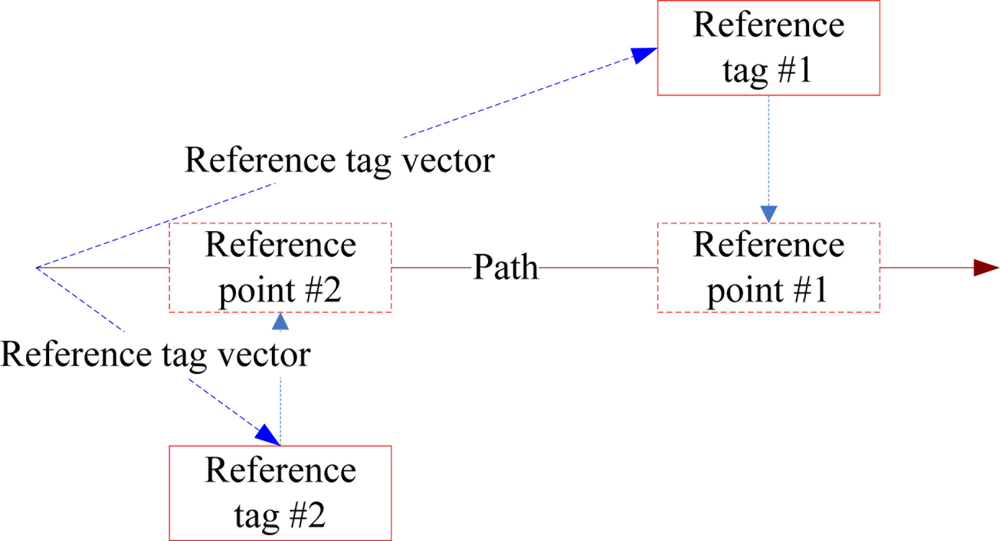
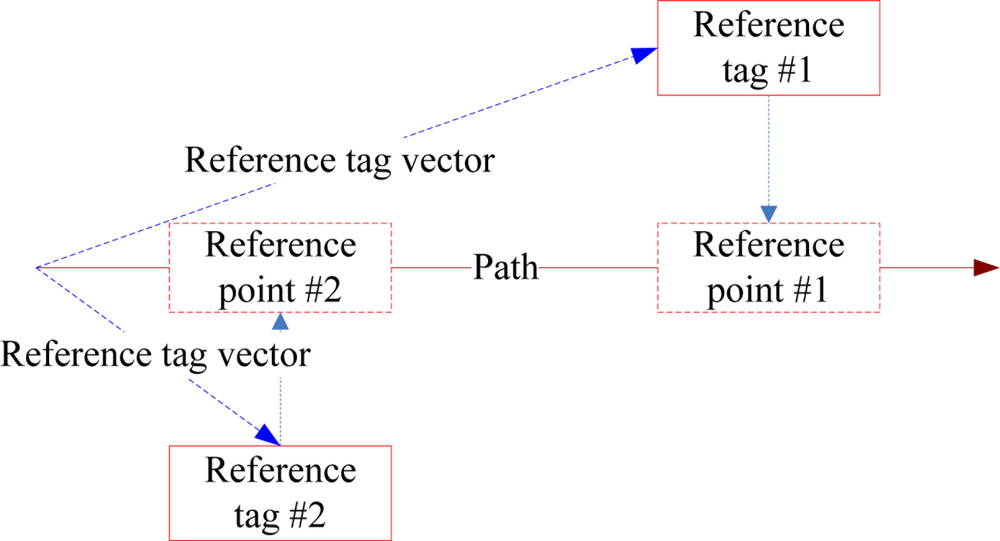
The positioning manager assesses the environment in which a resident lives and locates the positions of residents. The manager calculates the difference in signal strength between reference points and the resident’s tag. The manager then calculates the approximate location (LXY) of the resident on minified paths and estimates the resident’s probable zone (ZXY) based on the shrinkage ratio of 1/2r:
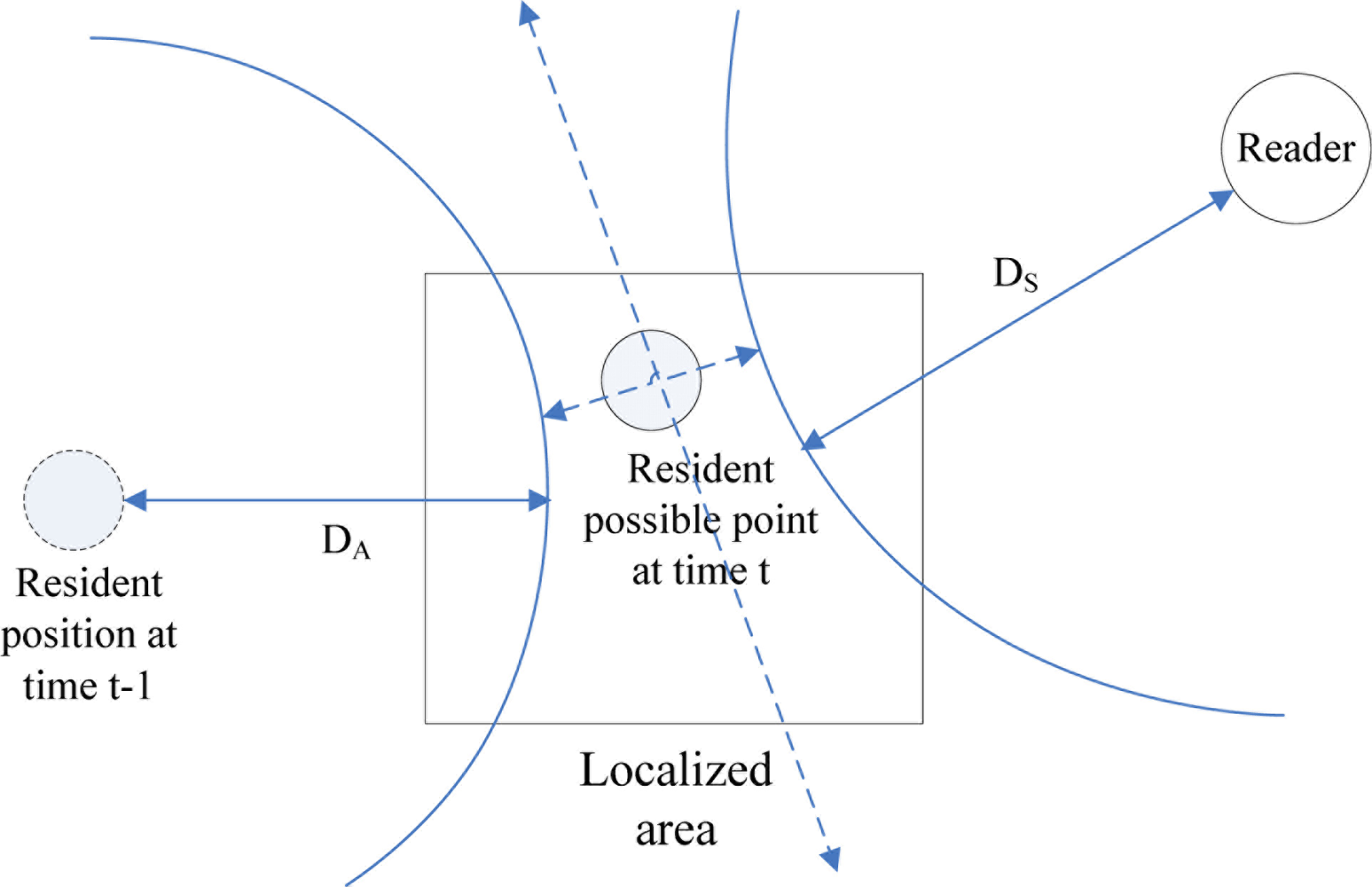
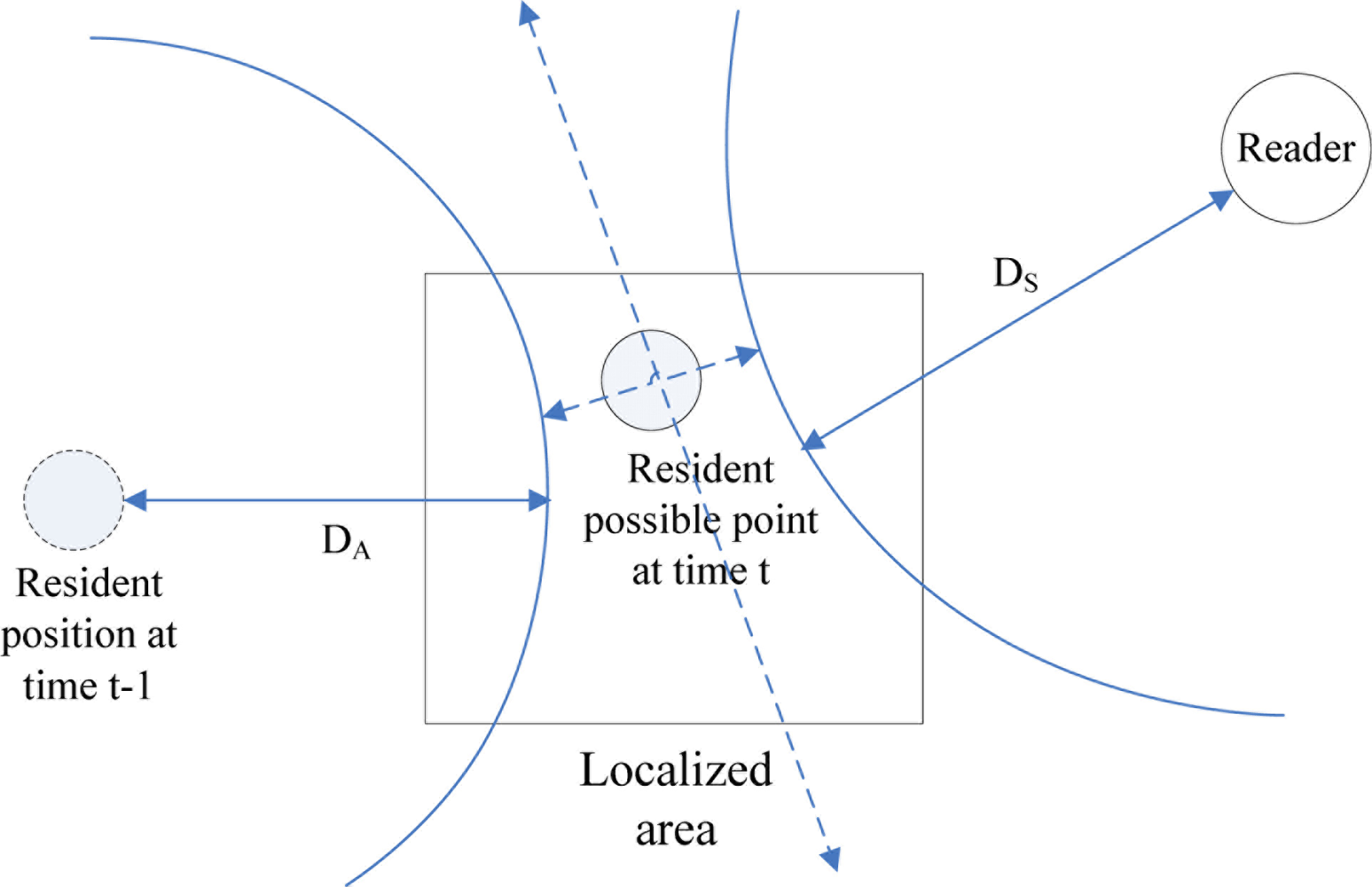
Based on information obtained through approximate location, the step size of the resident, and signal strength of the resident’s tag, the genetic algorithm calculates the probable coordinates PXY of the resident (Figure 5). The genetic algorithm encodes these probable coordinates PXY and randomly selects one among these coordinates. The algorithm makes an assessment based on the distance error between the estimated position of resident tag and RFID reader, and the distance difference between resident positions at times (t) and (t − 1):
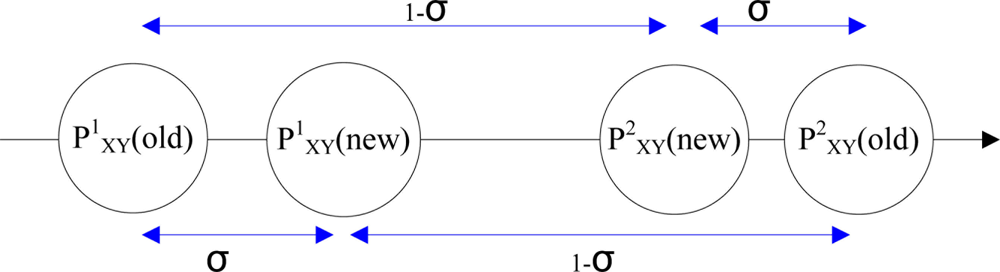
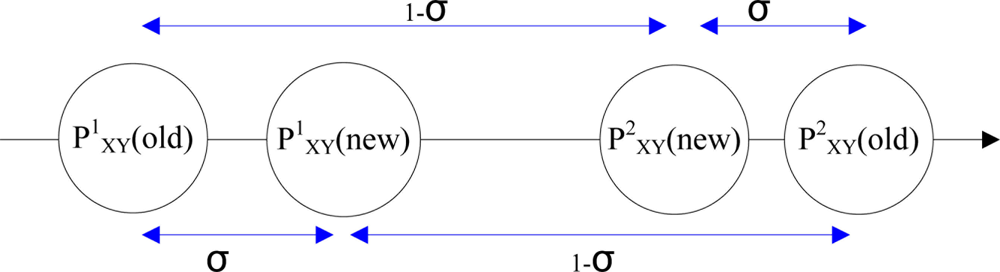
When the error of the approximate location exceeds the tolerance threshold, three possible residents’ coordinates with the largest evaluation functions are selected as parent generations for crossover. A minor shift value, σ, is added to the three chromosomes with largest evaluation value to generate six child chromosomes as probable coordinates of the resident. Figure 6 shows the cross operation for chromosomes 1 and 2:
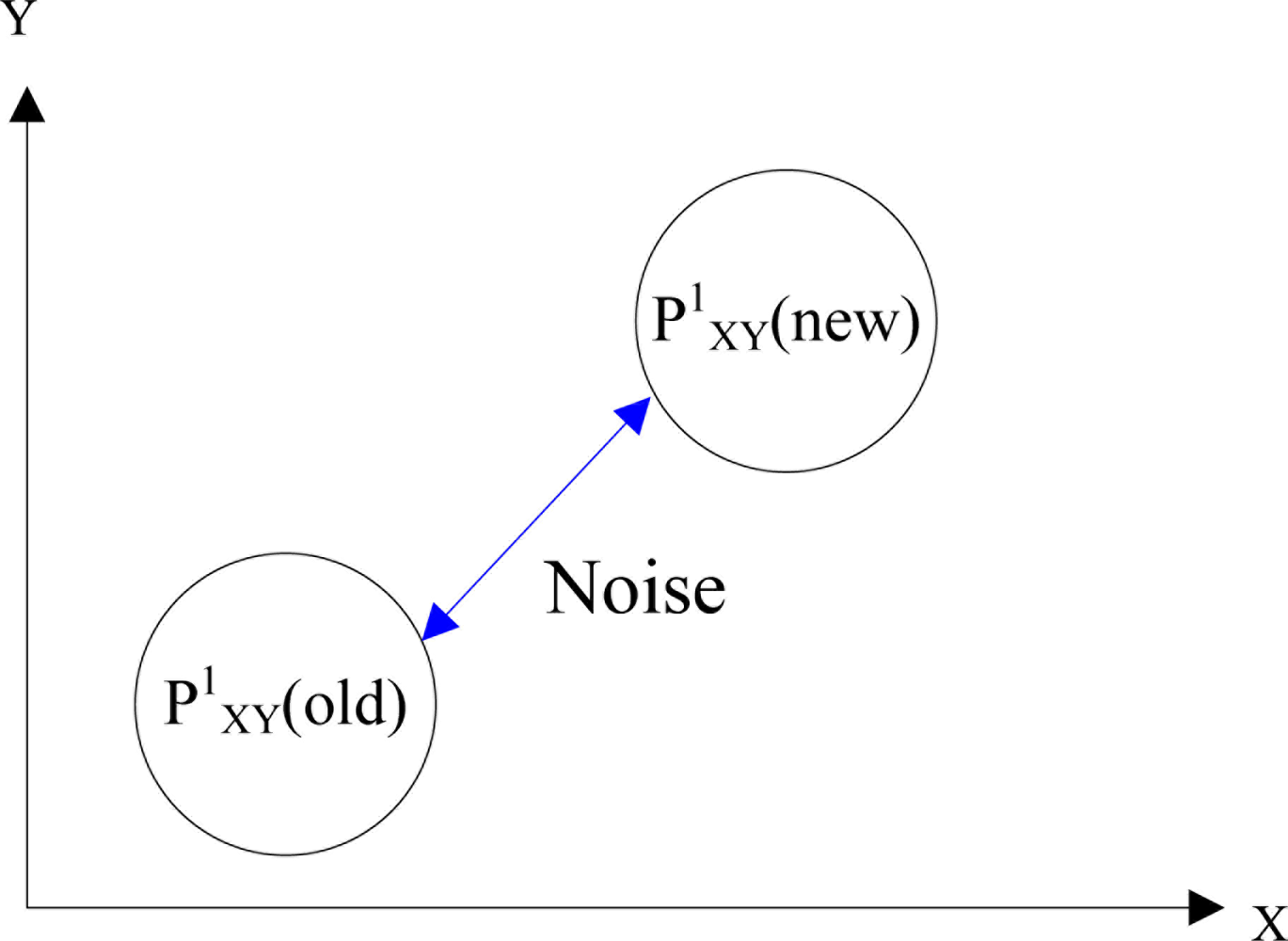
Figure 7 shows the mutation operation for chromosome 1. The crossover and mutation probabilities are 0.99 and 0.01, respectively. Finally, when the location search process converges to some positions, computing stops and the location with minimum error is selected as the resident’s location.
3. Simulation
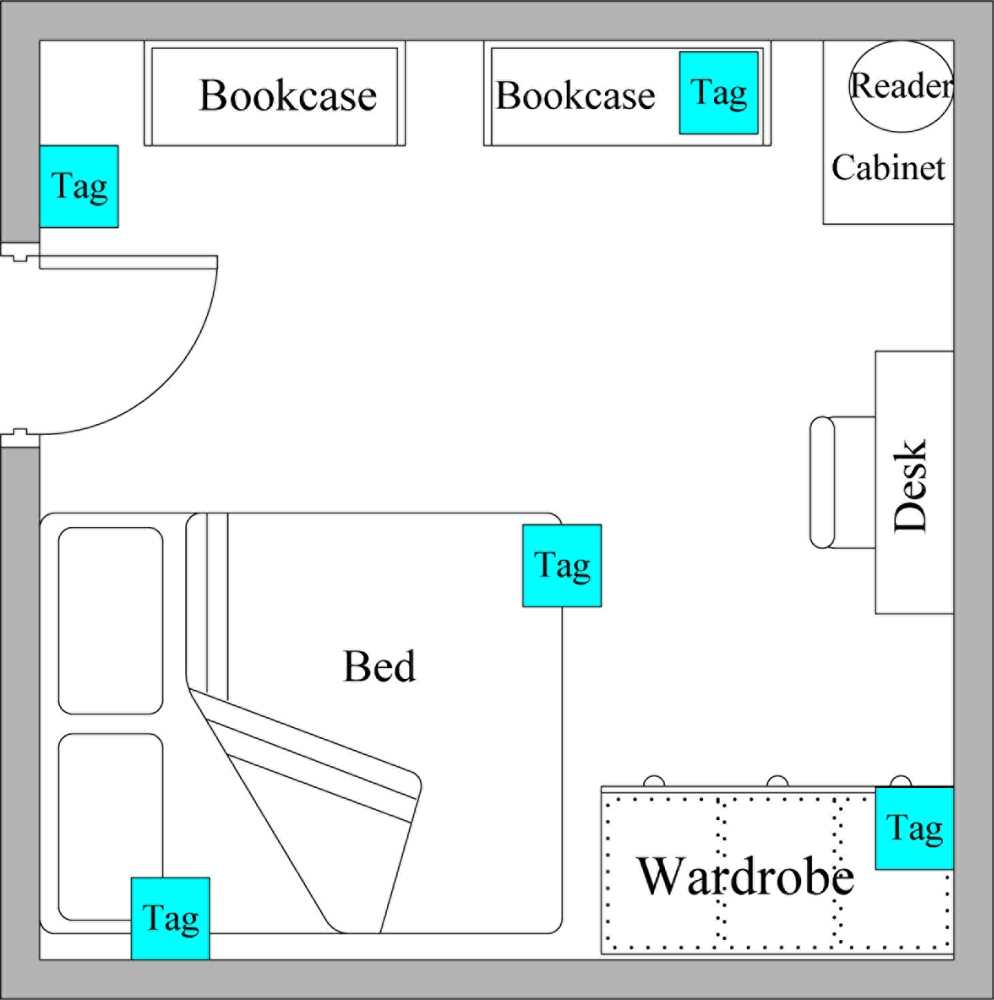
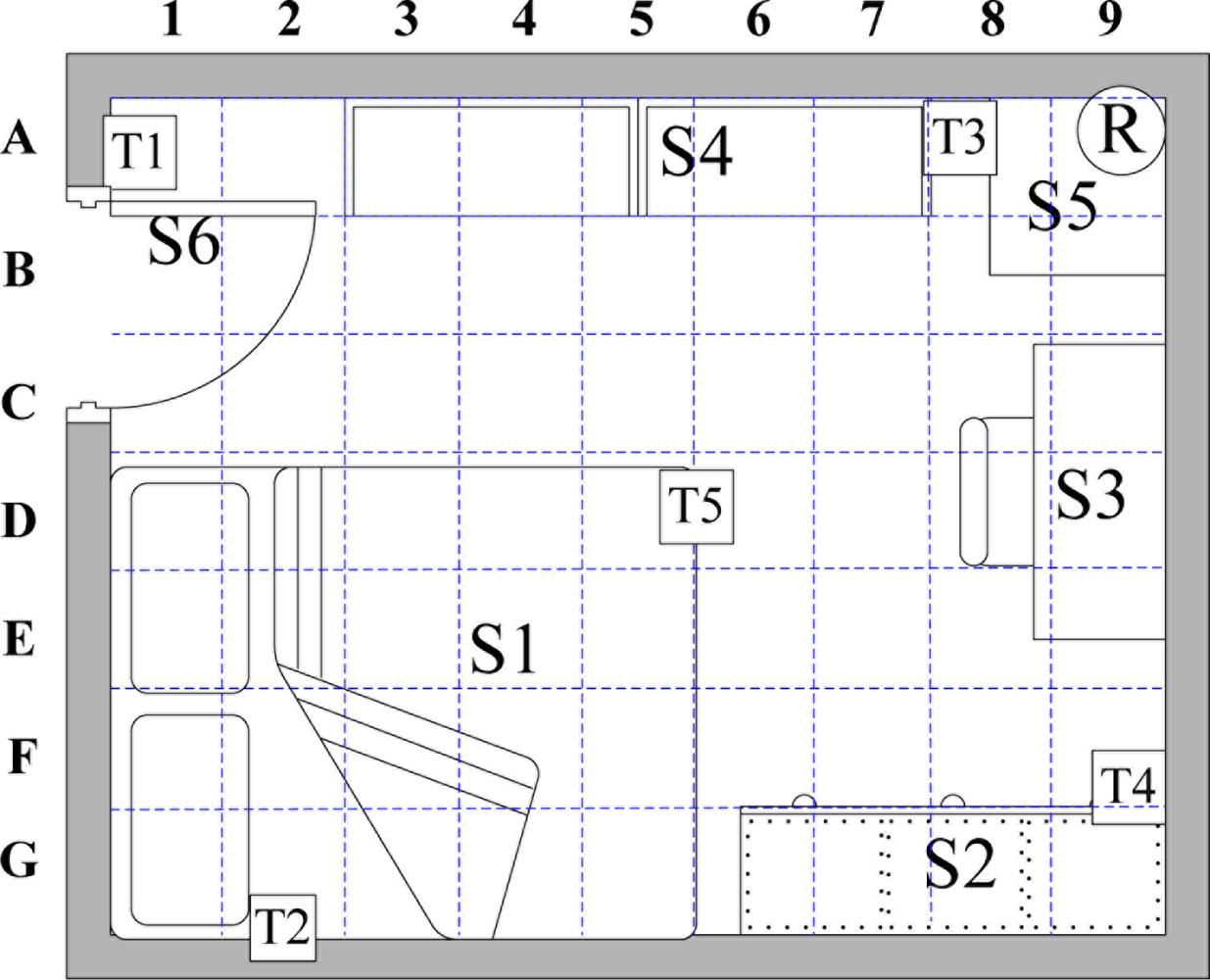
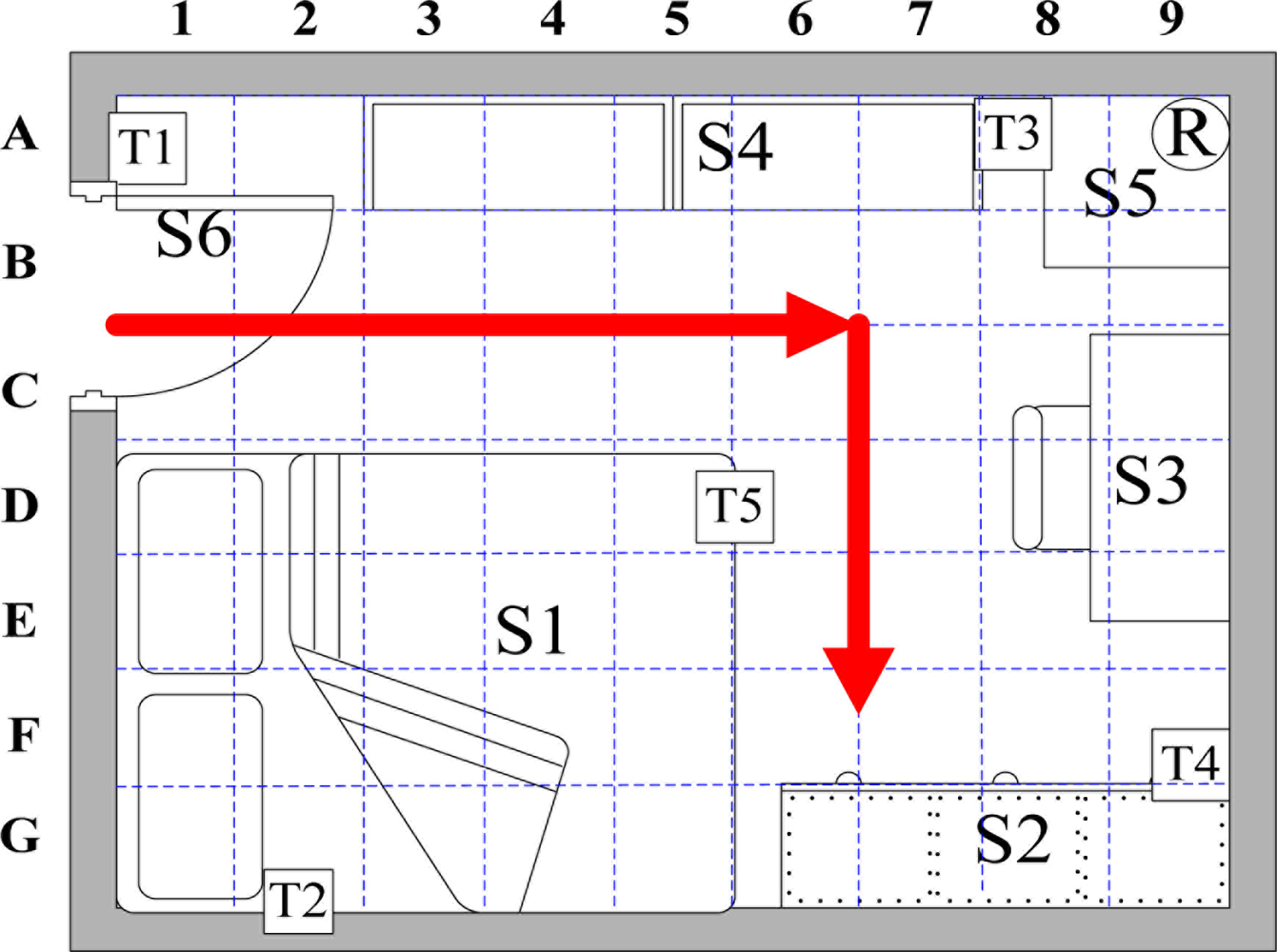
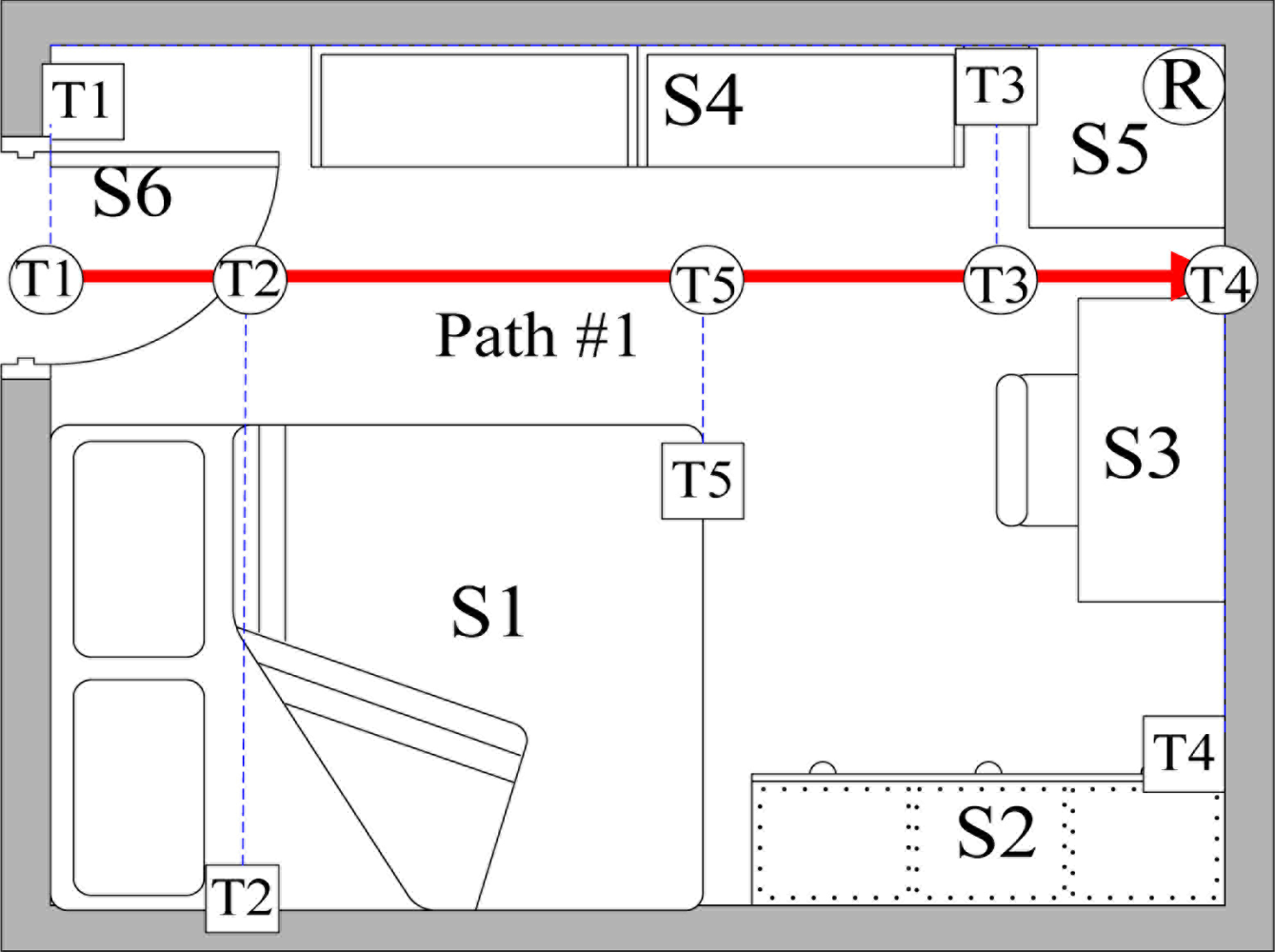
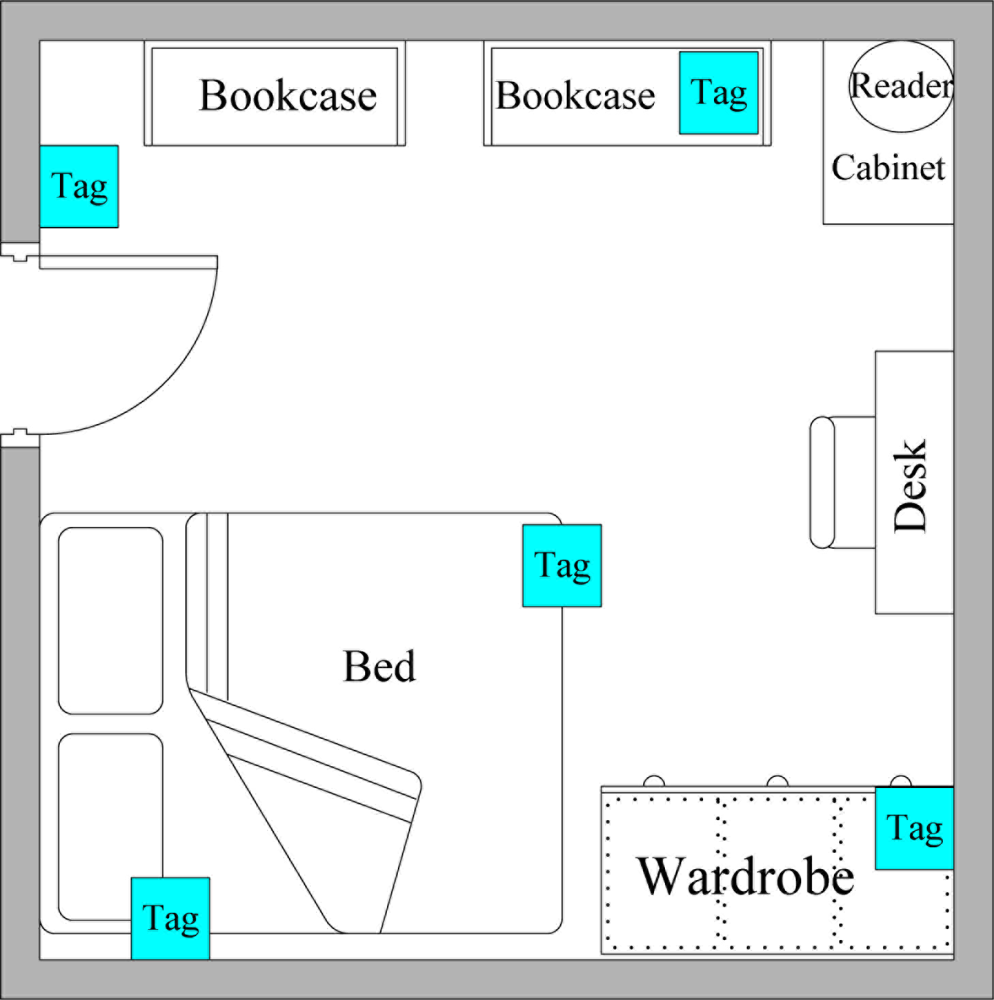
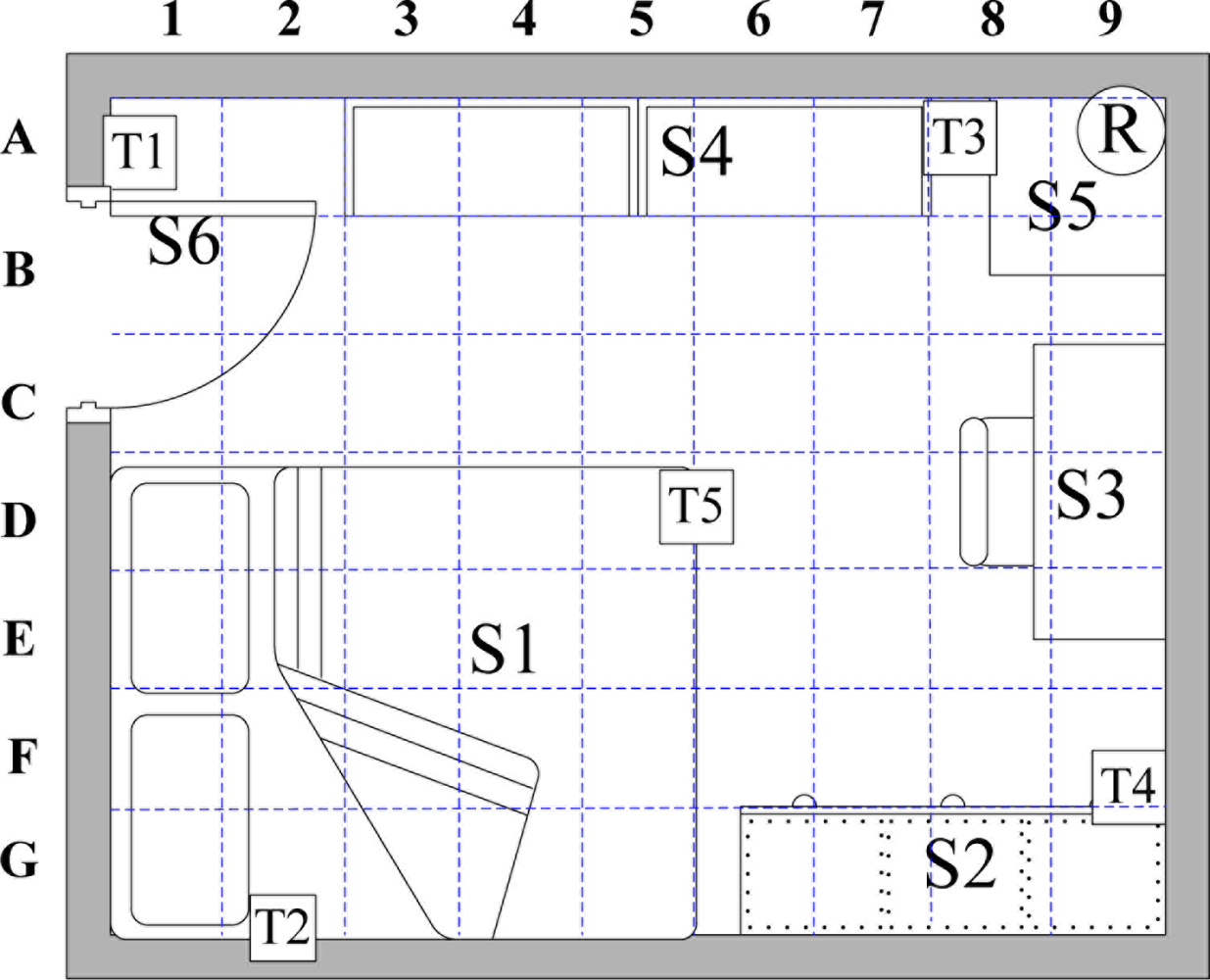
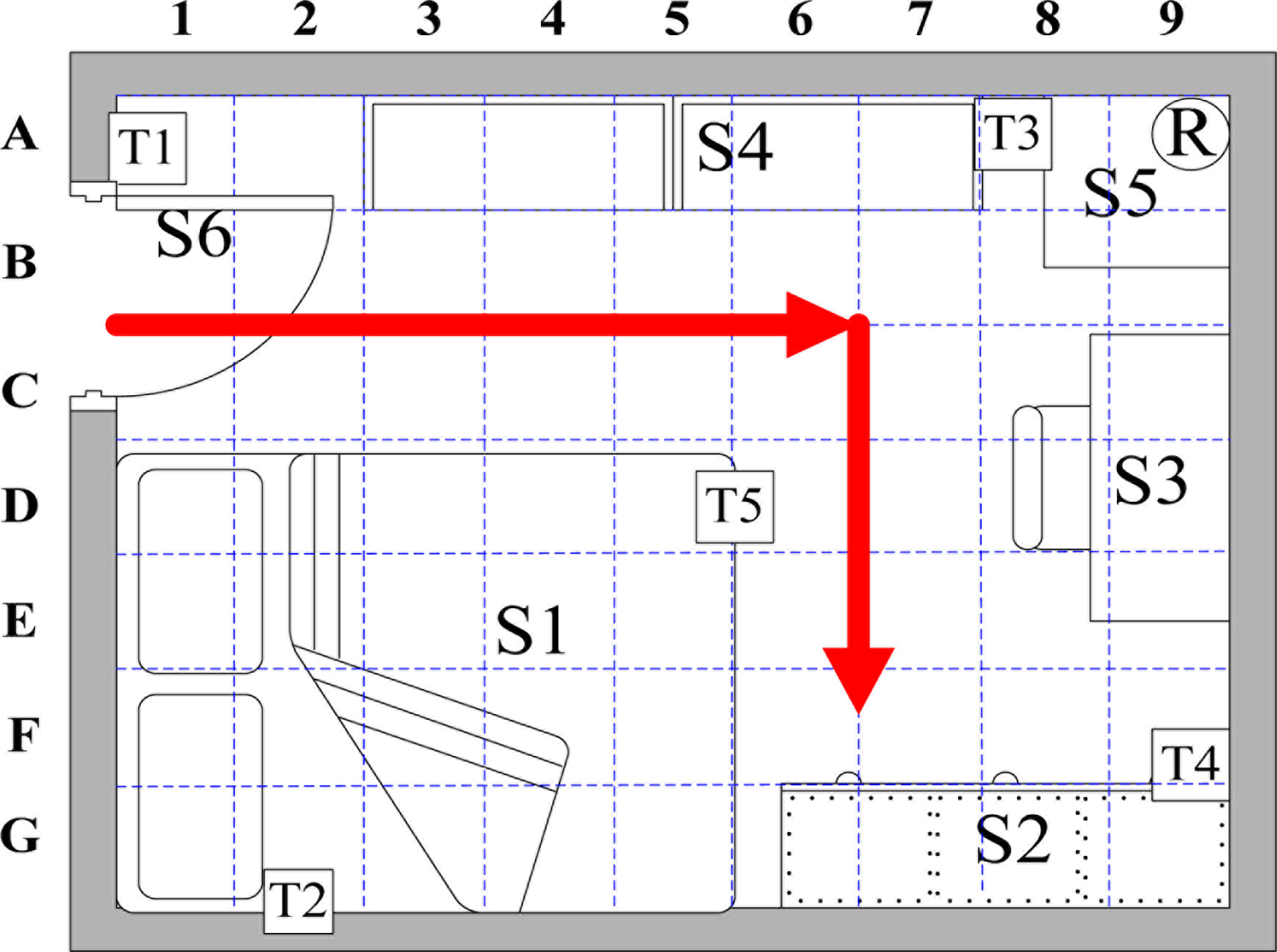
To track the movement of an elderly person living alone while considering the person’s slow movement, the proposed system monitors an elderly person’s locations in the bedroom, and considers RFID signal interference. Figure 8 and Table 1 show the bedroom layout and the corresponding number of objects in the room of each grid, respectively. The 360 cm × 280 cm bedroom is divided into 63 square grids with the area of 40 cm × 40 cm. Furniture locations are numbered for path establishment. The position of the RFID reader and tags are indicated by a coordinate. The proposed system uses 2.45 GHz active RFID reader and wireless accelerometer with model numbered Freescale ZSTAR3. The development environment is .NET Framework 3.5, C#, and MySQL running on Windows XP. Figure 9 shows the resident’s walking paths. Notably, the starting point is the bedroom entrance, and its coordinate is (0, 200). Resident step length is 40 cm.
3.1. Data Manager
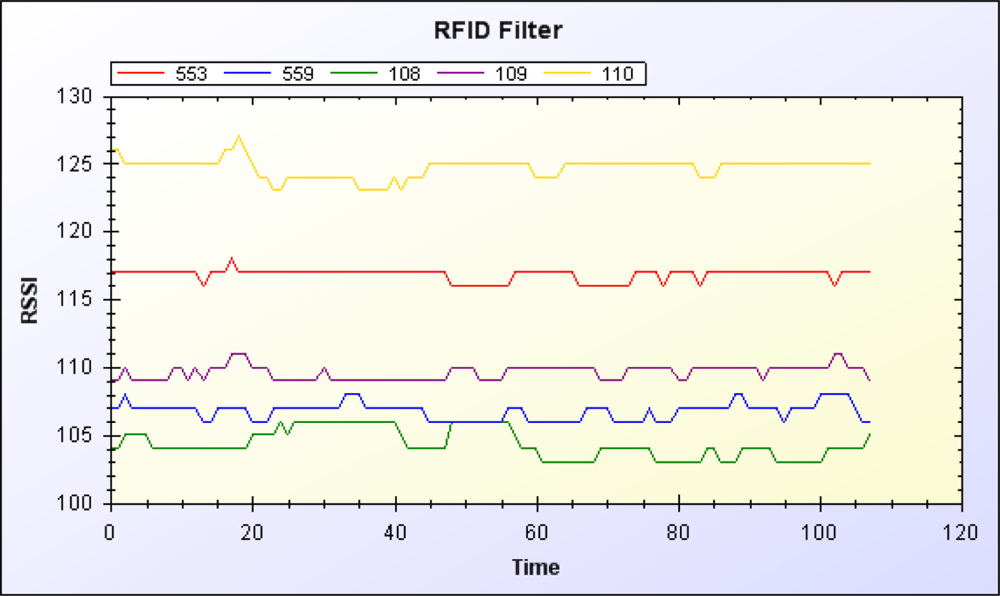
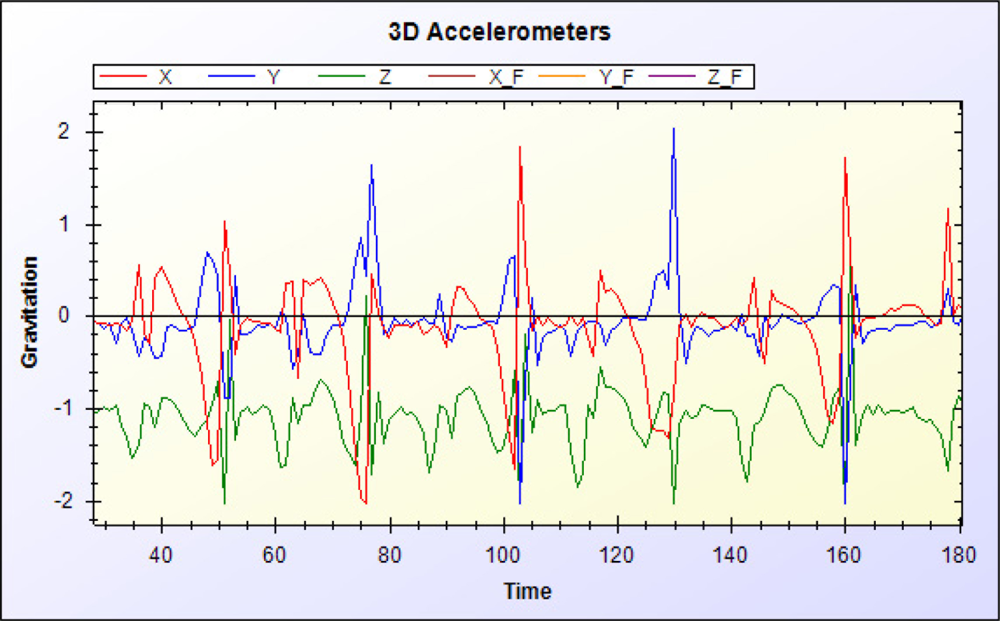
The data manager filters signals from RFID readers and the accelerometer. Figures 10 and 11 show the original RSSI value of the RFID and the RSSI value after moving average filtering, respectively. Figures 12 and 13 show the original acceleration value of the accelerometer and the acceleration value after moving average filtering, respectively. When error in the resident’s RFID signal strength is too large, the previous three signal strength variations are used for correction and to overcome signal inaccuracy. Table 2 shows the relationship of RFID signal strength and distance between RFID reader and reference tags.
The data manager establishes walking paths based on the bedroom layout. The furniture layout is in green, while walking paths are blue and orange [Figure 14(a)]. The paths are minified to the scale of 1/80 [Figure 14(b)] and presented with a linear Equation (11). Reference points and the corresponding RSSI values are calculated based on obtained paths (Table 3 and Figure 15).
The XYZ acceleration variations of the accelerometer after filtering are used to determine number of steps. Acceleration variations (VX, VY, and VZ), constant value (C1, C2) and threshold (θ) are (0.6, 0.5, −0.9), (8, −2), and 5, respectively. The step movement is computed in Equation (12):
3.2. Positioning Manager
The first step from the start point is taken as an example. The signal strength of the resident’s tag is 128. Table 4 lists the estimated values of E1, E2, E3, E4, E5, W1, W2, W3, W4, W5, and LXY. The probable zone (ZXY) of the resident is magnified 80 times in Equation (13):
The real value genetic algorithm is used to calculate the resident’s coordinates. The crossover rate is 0.99, and mutation rate is 0.01. Calculation stops after 1,000 iterations. The following nine sets of coordinates are randomly selected in the first selection: (39.2, 184), (28.2, 201), (34.2, 209), (10.2, 223), (43.2, 184), (−2.8, 236), (47.2, 218), (64.2, 239), and (71.2, 227). The evaluation function is introduced to spot coordinates that match. If no match exists, the first three coordinates with the largest evaluation functions are selected. Table 5 shows the crossover and mutation of resident coordinate encoding. The probable resident coordinate (29, 174) is obtained after 13 crossover and mutation operations. Each circulation contains nine sets of codes; the first four sets with the smallest errors are selected.
3.3. Experimental Evaluation
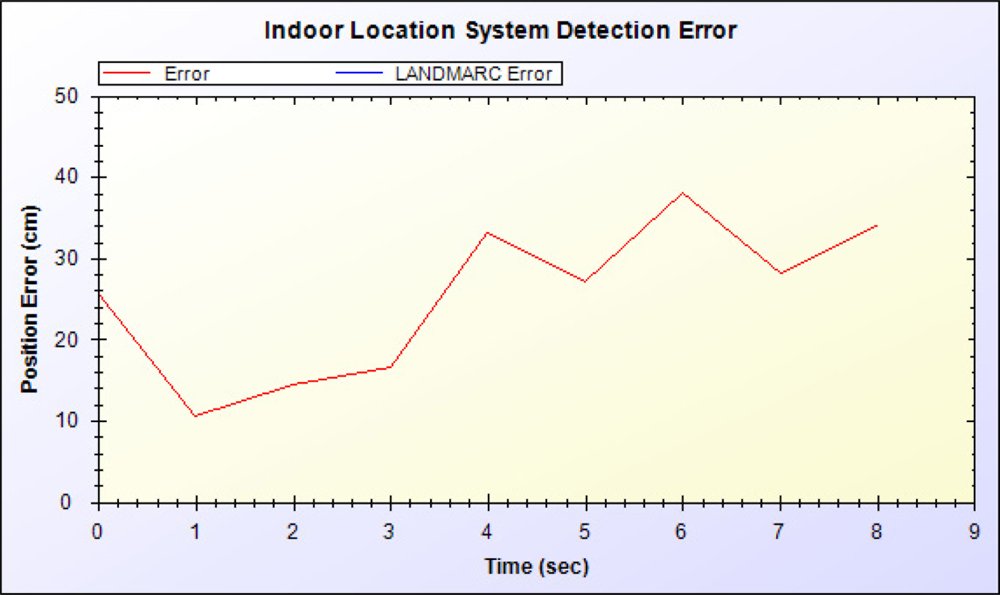
Figure 16 shows the difference (e) between the estimated location by the proposed system and actual location:
4. Discussion and Conclusions
4.1. Discussion
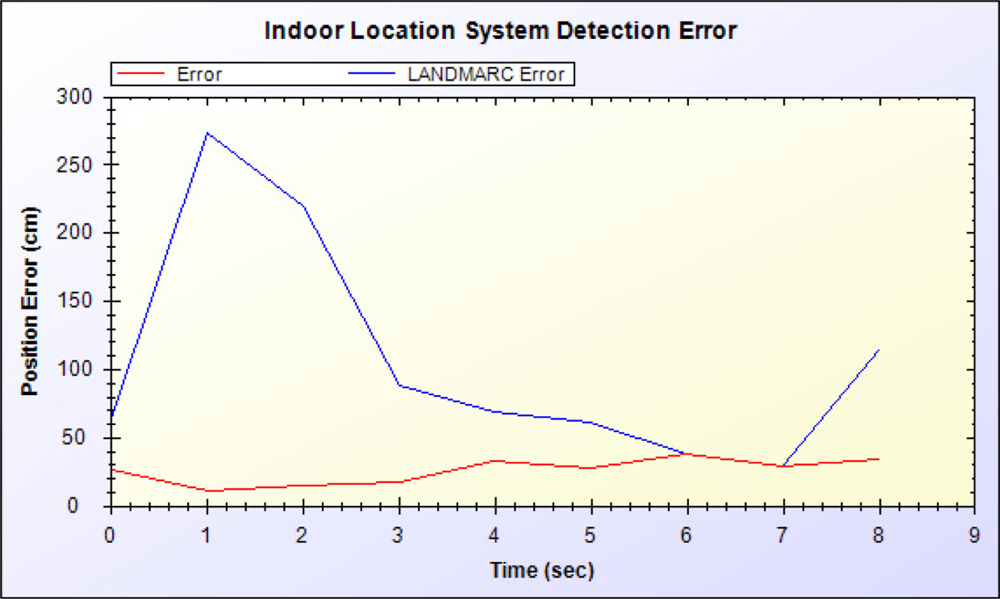
Figure 17 shows the errors between estimated location and actual location by the proposed sensor-assisted RDIF-based inhabitant tracking system and LANDMARC system. The LANDMARC approach uses only the ratio of signal strength to RFID readers for localization; thus, accuracy is unstable and a large error occurs. The proposed system uses miniaturized paths and an accelerometer to determine whether a resident is moving, thereby markedly increasing accuracy.
Various indoor localization methods exist, some apply only one sensor type and others use multiple sensor types. Direct measurement and distance measurement are the two most common measurement methods. Although direct measurement, which locates positions simply based on sensor signal strength is simple and straightforward, its cost increases as accuracy increases. Additionally, as a sensing area enlarges, the number of sensors required increases, as does cost. Distance measurement locates positions by applying signal strength to determine the error or distance relationship between RFID readers and tags. However, signal strength is susceptible to interference from both the environment and people. No effective solutions currently exist for signal interference. Although distance measurement is much cheaper than direct measurement and requires fewer sensors, the problem of signal interference remains unsolved. This work applies a novel system incorporating distance and smart measurements to correct errors and locate positions. Smart measurement locates positions with only a few sensors. Given that any measurement will inevitably generate errors, smart measurement utilizes smart algorithms for correction and reasoning, thereby improving accuracy significantly.
Table 6 shows previous RFID studies and compares these with the proposed system. Ni used the LANDMARC scheme to locate positions based on the RFID signal strength ratio [31]. Ni determined the ratio of signal strength of unknown tags to that of known tags, and then calculated locations of unknown tags based on those of known tags. The advantage of Ni’s method is that it only requires the RFID signal strength ratio for localization; however, the drawback is inaccuracy caused by too much signal interference. Jin reduced the calculation time of the LANDMARC approach by determining the locations of unknown tags based on overlapping areas of several readers, reducing the time for calculating excess signal strength [32]. Although Jin’s method reduces the calculation time required for the LANDMARC technique, its drawback is inaccuracy caused by too much signal interference. Shih used the signal strength ratio to locate the four known tags nearest unknown tags [35]. The square formed by the four known tags was divided to locate the closest area. The advantage is of this method is that it reduces the number of known tags required in the LANDMARC scheme; however, its drawback is inaccuracy caused by signal interference. Zhao reduced the number of excess known tags in the LANDMARC scheme by applying interpolation to the square formed by the four known tags to establish virtual tags [33]. Proximity maps were generated to determine the probable locations of unknown tags, and the signal strength ratio was then used for positioning. The advantage of this method is that it effectively reduces the number of known tags; however, it still suffers from signal interference. Bekkali utilized signal strength and the corresponding distance between RFID readers and tags to locate positions [24]. Bekkali calculated the angles and distances between readers and tags, and then used the cosine law to calculate the distances between known and unknown tags. Finally, triangulation was applied to obtain the locations of unknown tags and establish a probabilistic RFID map to correct locations. Although Bekkali’s method does not require an excessive number of readers and tags, it requires a large amount of reference tags for location correction.
4.2. Conclusions
This work proposes a novel sensor-assisted RFID-based indoor tracking system for elderly people living alone. The proposed system has two modules: the data manager and positioning manager. The data manager filters sensor signals by removing noise. With contextual information and XYZ acceleration values from the accelerometer, the data manager establishes walking paths and determines the number steps taken by a resident. Contextual information includes the layout of the occupied objects in the room, locations and signal strengths of RFID sensors, and XYZ acceleration values measured by the accelerometer while a resident is walking. The positioning manager uses the RSSI value of reference tags and walking paths to calculate approximate regions. Based on a resident’s RFID signal strength, number of steps, and approximate regions, the positioning manager uses the genetic algorithm to determine the probable locations of a resident.
The primary features of the proposed system are as follows. First, the system estimates probable regions of a resident, and then uses the location optimization method to find the locations with the smallest error. The proposed approach uses environment data to establish walking paths and incorporates the signal strength ratio to identify probable resident locations, thereby reducing the possibility of error and reducing the size of the probable area. With the tri-axis accelerometer, the approach corrects the coordinate of the actual location based on the number of steps taken and resident step length. Finally, the proposed scheme uses the real-value genetic algorithm to eliminate uncertain data and locate probable resident positions.
5. Future Work
The proposed intelligent RFID-based indoor tracking system only uses two sensor types, and the accelerometer determines whether a resident is walking. Therefore, little usable information for indoor tracking is generated. We suggest that future research integrate other sensors types. Additional resident information will enrich positioning data and improve the accuracy of location tracking. Furthermore, the RFID system acquires data from tags via radio frequencies. These radio frequencies can be adversely affected by interference in indoor environments. The reading rate depends markedly on the experience of an RFID system engineer placing or adjusting RFID readers and reference tags. Developing an intelligent system that automatically deploys readers and tags indoors is also a worthy research goal. Moreover, automatic collection of physiological data from elderly people living alone is another worthy research direction in modern society. Integration of RFID tags with other physiological sensors can extend the amount of time the elderly can live alone in their homes. Applications include health promotion and homecare for the elderly. For instance, the proposed system can prescribe appropriate physical exercises for the elderly according to indoor location, and monitor the indoor activity of the elderly.
Acknowledgments
The authors would like to thank the National Science Council of the Republic of China, Taiwan, for financially supporting this research under Contract No. NSC98-2220-E-030-001, NSC99-2220-E-030-001, and NSC100-2218-E-030-002.
References
- Hong, Y.J.; Kim, I.J.; Ahn, S.C.; Kim, H.G. Activity Recognition Using Wearable Sensors for Elder Care. Proceedings of the 2nd International Conference on Future Generation Communication and Networking, Sanya, Hainan, China, 13–15 December 2008; pp. 302–305.
- Hu, F.; Xiao, Y.; Hao, Q. Congestion-aware, loss-resilient bio-monitoring sensor networking for mobile health applications. IEEE J. Sel. Areas Commun 2009, 27, 450–465. [Google Scholar]
- Huang, C.Y.; Su, J.L. A Middleware of DICOM and Web Service for Home-Based Elder Healthcare Information System. Proceedings of the 6th International Special Topic Conference on Information Technology Applications in Biomedicine, Tokyo, Japan, 8–11 November 2007; pp. 182–185.
- Jimison, H.; Jessey, N.; McKanna, J.; Zitzelberger, T.; Kaye, J. Monitoring Computer Interactions to Detect Early Cognitive Impairment in Elders. Proceedings of the 1st Transdisciplinary Conference on Distributed Diagnosis and Home Healthcare, Arlington, VA, USA, 2–4 April 2006; pp. 75–78.
- Kelly, D.; McLoone, S.; Dishongh, T.; McGrath, M.; Behan, J. Single Access Point Location Tracking for In-Home Health Monitoring. Proceedings of the 5th Workshop on Positioning, Navigation and Communication, Hannover, Germany, 27 March 2008; pp. 23–29.
- Le, X.H.B.; Mascolo, M.D.; Gouin, A.; Noury, N. Health Smart Home—Towards an Assistant Tool for Automatic Assessment of the Dependence of Elders. Proceedings of the 29th IEEE Annual International Conference on Engineering in Medicine and Biology Society, Lyon, France, 23–26 August 2007; pp. 3806–3809.
- Lee, S.W.; Kim, Y.J.; Lee, G.S.; Cho, B.O.; Lee, N.H. A Remote Behavioral Monitoring System for Elders Living Alone. Proceedings of the International Conference on Control, Automation and Systems (ICCAS’07), Seoul, Korea, 17–20 October 2007; pp. 2725–2730.
- Marco, A.; Casas, R.; Falco, J.; Gracia, H.; Artigas, J.I.; Roy, A. Location-based services for elderly and disabled people. Comput. Commun 2009, 31, 1055–1066. [Google Scholar]
- Mukhopadhyay, S.C.; Gupta, G.S. Sensors and Robotic Environment for Care of the Elderly. Proceedings of the International Workshop on Robotic and Sensors Environments (ROSE’07), Ottawa, ON, Canada, 12–13 October 2007; pp. 1–6.
- Taleb, T.; Bottazzi, D.; Guizani, M.; Nait-Charif, H. Angelah: A framework for assisting elders at home. IEEE J. Sel. Areas Commun 2009, 27, 480–494. [Google Scholar]
- Alwan, M.; Rajendran, P.J.; Kell, S.; Mack, D.; Dalal, S.; Wolfe, M.; Felder, R. A Smart and Passive Floor-Vibration Based Fall Detector for Elderly. Proceedings of the IEEE International Conference on Information & Communication Technologies (ICTTA’06), Damascus, Syria, 24–28 April 2006; pp. 1003–1007.
- Aparicio, S.; Perez, J.; Bernardos, A.M.; Casar, J.R. A Fusion Method Based on Bluetooth and WLAN Technologies for Indoor Location. Proceedings of the IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems, Seoul, Korea, 20–22 August 2008; pp. 487–491.
- Ayase, R.; Higashi, T.; Takayama, S.; Sagawa, S.; Ashida, N. A Method for Supporting At-Home Fitness Exercise Guidance and At-Home Nursing Care for the Elders, Video-Based Simple Measurement System. Proceedings of the 10th International Conference on E-Health Networking, Applications and Services, Singapore, 7–9 July 2008; pp. 182–186.
- Doukas, C.; Maglogiannis, I. Advanced Patient or Elder Fall Detection Based on Movement and Sound Data. Proceedings of the 2nd International Conference on Pervasive Computing Technologies for Healthcare, Tampere, Finland, 30 January–1 Feburary 2008; pp. 103–107.
- Shieh, W.Y.; Huang, J.C. Speedup the Multi-Camera Video-Surveillance System for Elder Falling Detection. Proceedings of the International Conference on Embedded Software and Systems (ICESS’09), Hangzhou, Zhejiang, China, 25–27 May 2009; pp. 350–355.
- Wang, C.C.; Chiang, C.Y.; Lin, P.Y.; Chou, Y.C.; Kuo, I.T.; Huang, C.N.; Chan, C.T. Development of a Fall Detecting System for the Elderly Residents. Proceedings of the 2nd International Conference on Bioinformatics and Biomedical Engineering (ICBBE’08), Shanghai, China, 16–18 May 2008; pp. 1359–1362.
- Zhou, Z.; Chen, X.; Chung, Y.C.; He, Z.; Han, T.X.; Keller, J.M. Activity analysis, summarization, and visualization for indoor human activity monitoring. IEEE Trans. Circ. Syst. Video Tech 2008, 18, 1489–1498. [Google Scholar]
- Nasution, A.H.; Emmanuel, S. Intelligent Video Surveillance for Monitoring Elderly in Home Environments. Proceedings of the IEEE 9th Workshop on Multimedia Signal Processing (MMSP'07), Crete, Greece, 1–3 October 2007; pp. 203–206.
- Liau, W.H.; Wu, C.L.; Fu, L.C. Inhabitants tracking system in a cluttered home environment via floor load sensors. IEEE Trans. Autom. Sci. Eng 2008, 5, 10–20. [Google Scholar]
- Manley, E.D.; Nahas, H.A.; Deogun, J.S. Localization and Tracking in Sensor Systems. Proceedings of the IEEE International Conference on Sensor Networks, Ubiquitous, and Trustworthy Computing, Taichung, Taiwan, 5–7 June 2006; pp. 237–242.
- Rahman, M.Z.; Kleeman, L. Paired measurement localization: A robust approach for wireless localization. IEEE Trans. Mob. Comput 2009, 8, 1087–1102. [Google Scholar]
- Yim, J. Introducing a decision tree-based indoor positioning technique. Expert Syst. Appl 2008, 34, 1296–1302. [Google Scholar]
- Yim, J.; Jeong, S.; Gwon, K.; Joo, J. Improving of kalman filters for WLAN based indoor tracking. Expert Syst. Appl 2010, 37, 426–433. [Google Scholar]
- Yu, C.R.; Wu, C.L.; Lu, C.H.; Fu, L.C. Human Localization via Multi-Cameras and Floor Sensors in Smart Home. Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, Taipei, Taiwan, 8–11 October 2006; pp. 3822–3827.
- Papapostolou, A.; Chaouchi, H. RFID-assisted indoor localization and the impact of interference on its performance. J. Netw. Comput. Appl 2011, 34, 902–913. [Google Scholar]
- Tesoriero, R.; Tebar, R.; Gallud, J.A.; Lozano, M.D.; Penichet, V.M.R. Improving location awareness in indoor spaces using RFID technology. Expert Syst. Appl 2010, 37, 894–898. [Google Scholar]
- Shiraishi, T.; Komuro, N.; Ueda, H.; Kasai, H.; Tsuboi, T. Indoor Location Estimation Technique Using UHF Band RFID. Proceedings of the International Conference on Information Networking, Busan, Koera, 23–25 January 2008; pp. 1–5.
- Alippi, C.; Cogliati, D.; Vanini, G. A Statistical Approach to Localize Passive RFIDs. Proceedings of the IEEE International Symposium on Circuits and Systems (ISCAS’06), Kos, Greece, 12–14 May 2006; pp. 1–4.
- Jiang, W.; Yu, D.; Ma, Y. A Tracking Algorithm in RFID Reader Network. Proceedings of the Japan-China Joint Workshop on Frontier of Computer Science and Technology (FCST’06), Fukushima, Japan, 17–18 November 2006; pp. 164–171.
- Zah, C.H.; Fezer, S.F. Embedded Sensor Scout Flooring System by Interface Flor. Proceedings of the IEEE International Conference on Technologies for Practical Robot Applications (TePRA’08), Woburn, MA, USA, 10–11 November 2008; pp. 106–110.
- Ni, L.M.; Liu, Y.; Lau, Y.C.; Patil, A.P. LANDMARC: Indoor location sensing using active RFID. Wirel. Netw 2004, 10, 701–710. [Google Scholar]
- Jin, G.Y.; Lu, X.Y.; Park, M.S. An Indoor Localization Mechanism Using Active RFID Tag. Proceedings of the IEEE International Conference on Sensor Networks, Ubiquitous, and Trustworthy Computing (SUTC’06), Taichung, Taiwan, 5–7 June 2006; pp. 40–43.
- Zhao, Y.; Liu, Y.; Ni, L.M. VIRE: Active RFID-based Localization Using Virtual Reference Elimination. Proceedings of the International Conference on Parallel Processing (ICPP’07), Xi’an, China, 10–14 September 2007; p. 56.
- Bekkali, A.; Sanson, H.; Matsumoto, M. RFID Indoor Positioning Based on Probabilistic RFID Map and Kalman Filtering. Proceedings of the IEEE International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob’07), White Plains, NY, USA, 8–10 October 2007; pp. 21–27.
- Shih, S.T.; Hsieh, K.; Chen, P.Y. An Improvement Approach of Indoor Location Sensing Using Active RFID. Proceedings of the 1st International Conference on Innovative Computing, Information and Control (ICICIC’06), Beijing, China, 30 August–1 September 2006; pp. 453–456.
- Yeh, S.Y.; Chang, K.H.; Wu, C.I.; Chu, H.H.; Hsu, J.Y.J. GETA sandals: A footstep location tracking system. Pers. Ubiq. Comput. J 2007, 11, 451–463. [Google Scholar]
- Hsu, C.C.; Yuan, P.C. The design and implementation of an intelligent deployment system for RFID readers. Expert Syst. Appl 2011, 38, 10506–10517. [Google Scholar]
- Huang, H.P.; Chang, Y.T. Optimal layout and deployment for RFID systems. Adv. Eng. Informat 2011, 25, 4–10. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Environment layout | Number | Location |
|---|---|---|
| Bed | S1 | D1, D2, D3, D4, D5, E1, E2, E3, E4, E5, F1, F2, F3, F4, F5, G1, G2, G3, G4, G5 |
| Wardrobe | S2 | G6, G7, G8, G9 |
| Desk | S3 | C8, C9, D8, D9, E8, E9 |
| Bookcase | S4 | A3, A4, A5, A6, A7 |
| Cabinet | S5 | A8, A9, B8, B9 |
| Door | S6 | |
| Others | A1, A2, F8, F9 | |
| RFID reader | R | (360, 280) |
| Reference tag #1 | T1 | (0, 260) |
| Reference tag #2 | T2 | (60, 0) |
| Reference tag #3 | T3 | (280, 280) |
| Reference tag #4 | T4 | (360, 40) |
| Reference tag #5 | T5 | (200, 140) |
| Reference tag # | Distance between reader and tag (CM) | RSSI |
|---|---|---|
| 1 | 360 | 127 |
| 2 | 410 | 117 |
| 3 | 80 | 161 |
| 4 | 240 | 136 |
| 5 | 210 | 140 |
| Reference tag | Coordinates of reference point | Minified coordinates of reference point | Signal strength of reference point |
|---|---|---|---|
| T1 | (0, 200) | (0, 2.5) | 125.24 |
| T2 | (60, 200) | (0.75, 2.5) | 135.71 |
| T3 | (280, 200) | (3.5, 2.5) | 155.65 |
| T4 | (360, 200) | (4.5, 2.5) | 161 |
| T5 | (200, 200) | (2.5, 2.5) | 145.03 |
| E1 | E2 | E3 | E4 | E5 | L |
|---|---|---|---|---|---|
| 0.1312 | 0.1316 | 0.0013 | 0.0009 | 0.0034 | |
| W1 | W2 | W3 | W4 | W5 | (0.44, 2.5) |
| 0.4807 | 0.4986 | 0.0048 | 0.0034 | 0.0013 |
| Generation # | Location 1 | Location 2 | Location 3 | Location 4 |
|---|---|---|---|---|
| 0 | (39.2, 184) | (28.2, 201) | (34.2, 209) | (10.2, 223) |
| 1 | (37, 188) | (36, 192) | (31, 197) | (39.2, 184) |
| 2 | (35, 189) | (35, 191) | (33, 194) | (37, 188) |
| 3 | (34, 189) | (33, 190) | (35, 189) | (35, 191) |
| 4 | (32, 188) | (33, 188) | (34, 189) | (33, 190) |
| 5 | (34, 182) | (35, 183) | (32, 188) | (33, 188) |
| 6 | (32, 183) | (34, 181) | (34, 182) | (35, 183) |
| 7 | (33, 180) | (32, 183) | (32, 183) | (34, 181) |
| 8 | (31, 181) | (33, 180) | (31, 182) | (32, 183) |
| 9 | (31, 179) | (30, 180) | (31, 181) | (33, 180) |
| 10 | (31, 179) | (29, 178) | (28, 177) | (28, 177) |
| 11 | (29, 176) | (29, 176) | (31, 179) | (29, 178) |
| 12 | (31, 177) | (31, 177) | (29, 176) | (29, 176) |
| 13 | (29, 174) | (29, 174) | (29, 176) | (31, 177) |
| Feature | Proposed system | LANDMARC | Jin | Shih | Zhao | Bekkali |
|---|---|---|---|---|---|---|
| Reader# | 1 | Multiple | Multiple | 4 | Multiple | 2 |
| Tag# | Few | Many | Many | Medium | Medium | Medium |
| Interference problem | Handle | Neglect | Neglect | Neglect | Neglect | Neglect |
| Auxiliary device | Tri-axis accelerometer | None | None | None | None | None |
| RSSI reference | Yes | Yes | Yes | Yes | Yes | None |
| Reference style | Reference points | Reference tags | Reference tags | Reference tags | Reference tags | Reference tags |
| Context information | Yes | None | None | None | None | None |
© 2011 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Hsu, C.-C.; Chen, J.-H. A Novel Sensor-Assisted RFID-Based Indoor Tracking System for the Elderly Living Alone. Sensors 2011, 11, 10094-10113. https://doi.org/10.3390/s111110094
Hsu C-C, Chen J-H. A Novel Sensor-Assisted RFID-Based Indoor Tracking System for the Elderly Living Alone. Sensors. 2011; 11(11):10094-10113. https://doi.org/10.3390/s111110094
Chicago/Turabian StyleHsu, Chien-Chang, and Jun-Hao Chen. 2011. "A Novel Sensor-Assisted RFID-Based Indoor Tracking System for the Elderly Living Alone" Sensors 11, no. 11: 10094-10113. https://doi.org/10.3390/s111110094