Testing ZigBee Motes for Monitoring Refrigerated Vegetable Transportation under Real Conditions

Abstract
:
1. Introduction
2. Materials and Methods
2.1. ZigBee Motes
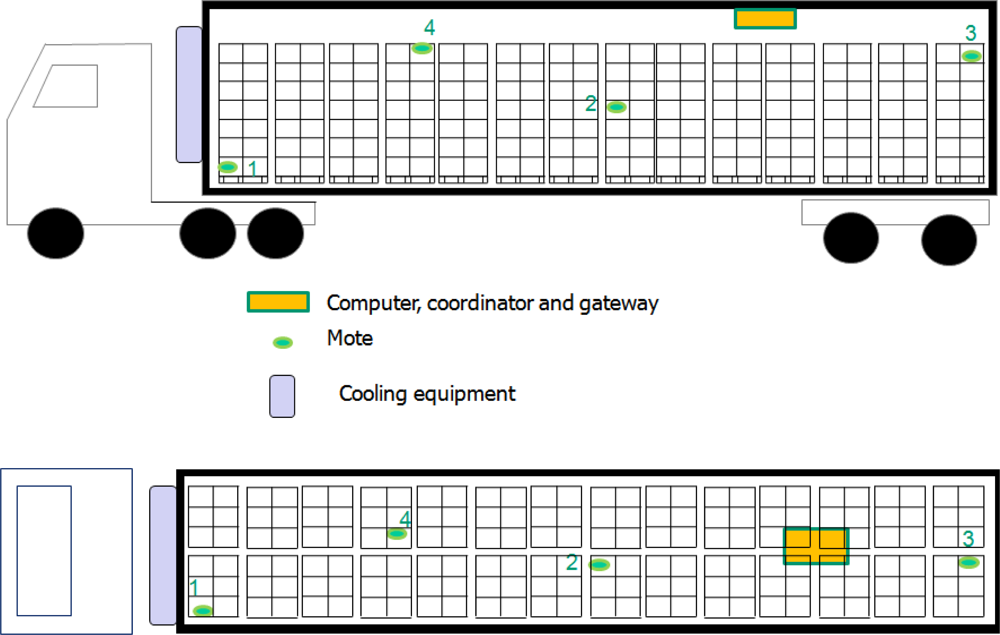
2.2. Experimental Set Up
2.3. Data Analysis
2.4. Analysis of Variance
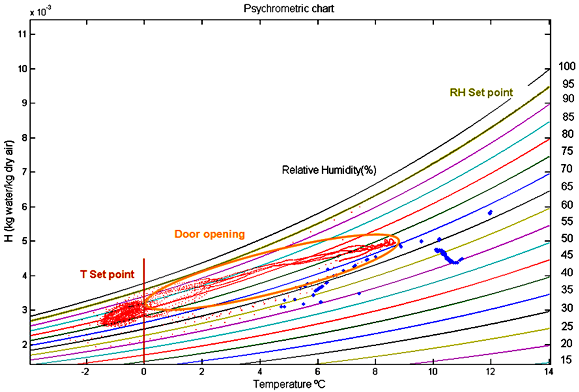
2.5. Psychrometric Data
3. Results and Discussion
3.1. Reliability of Transmission
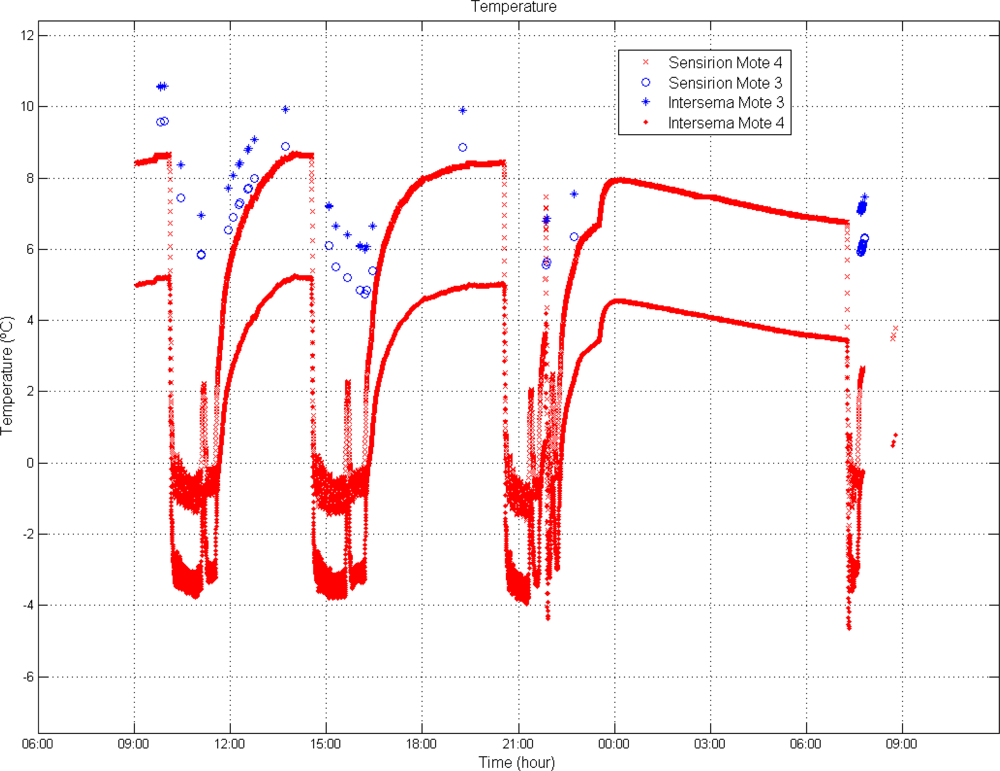
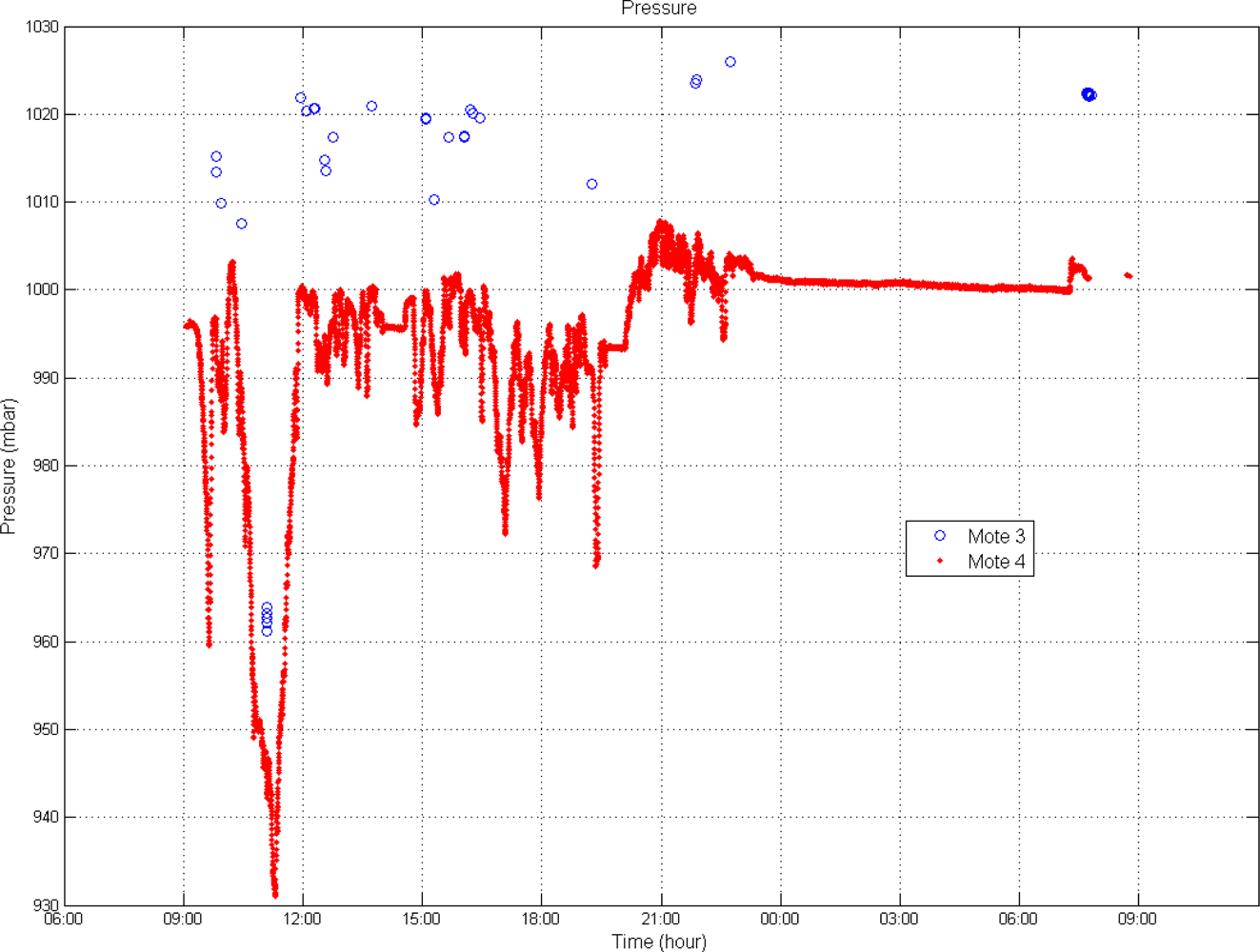
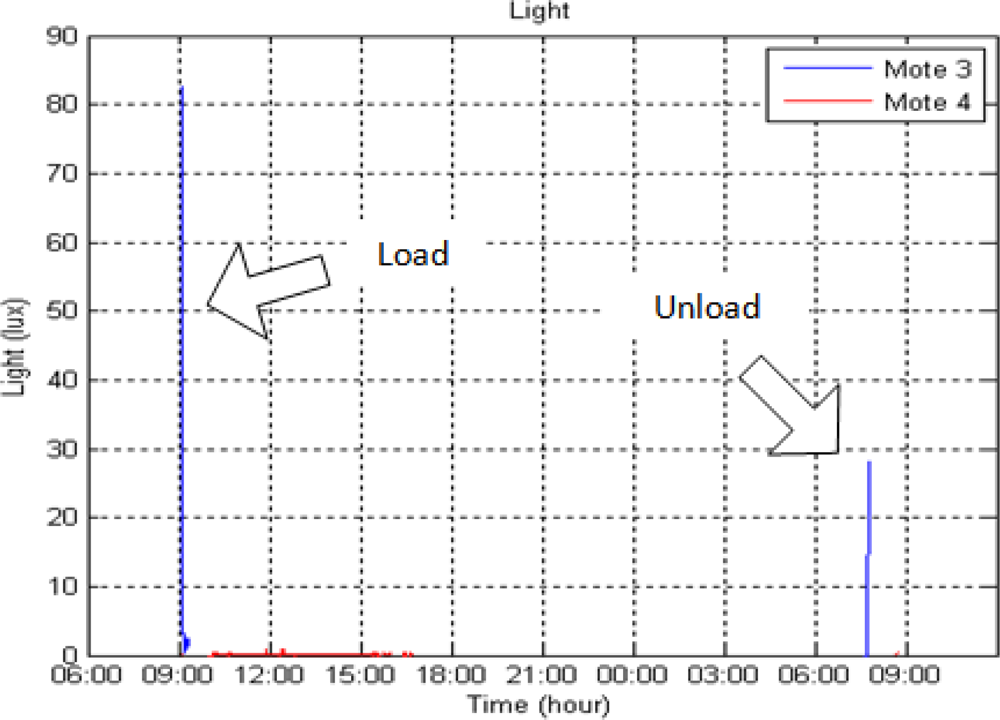
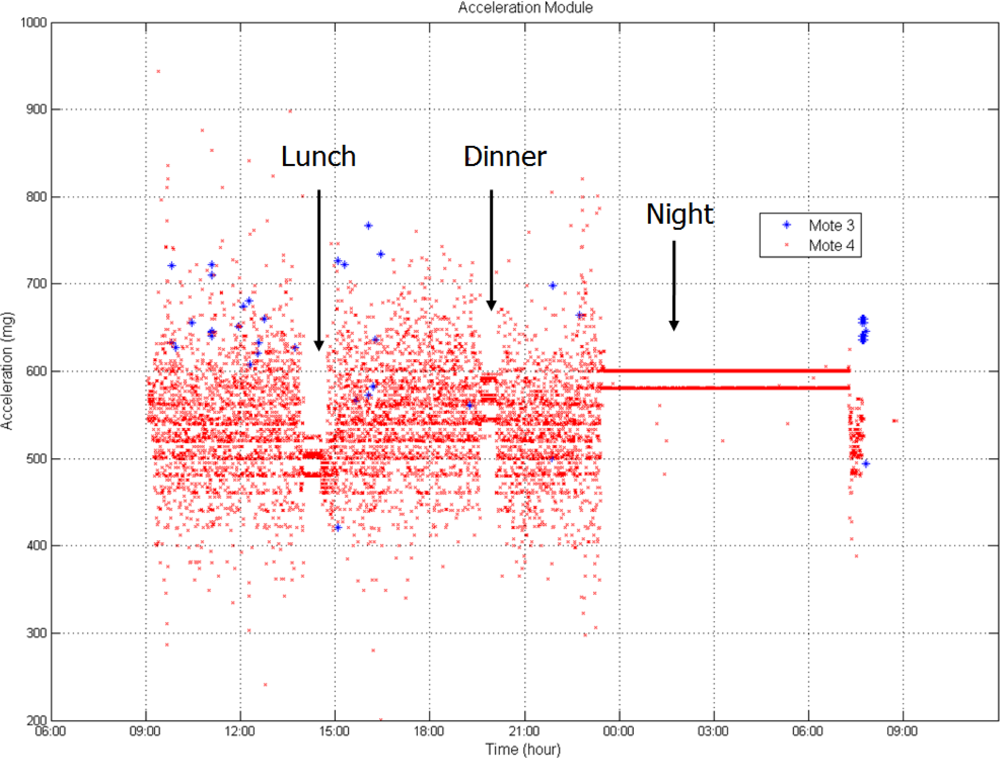
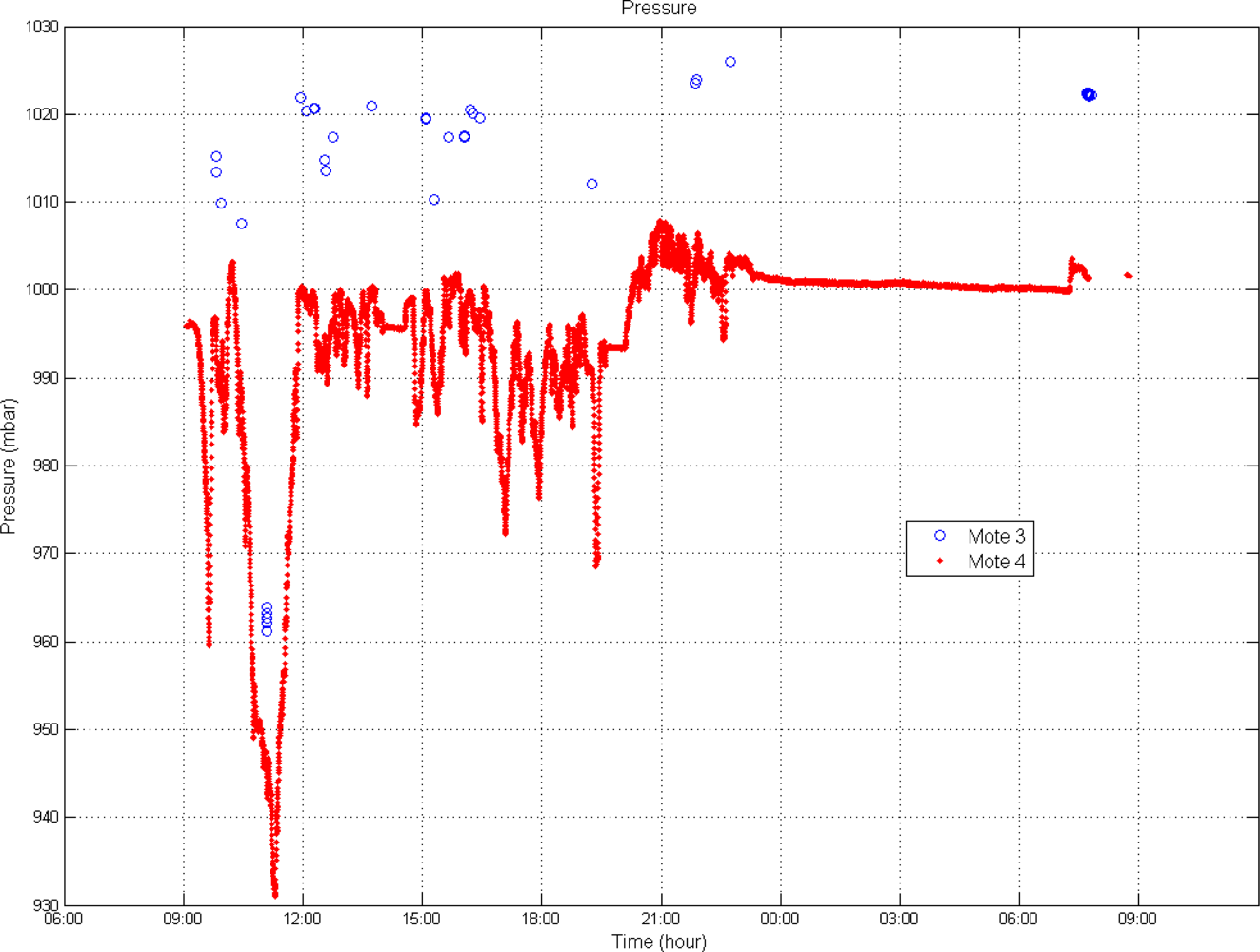
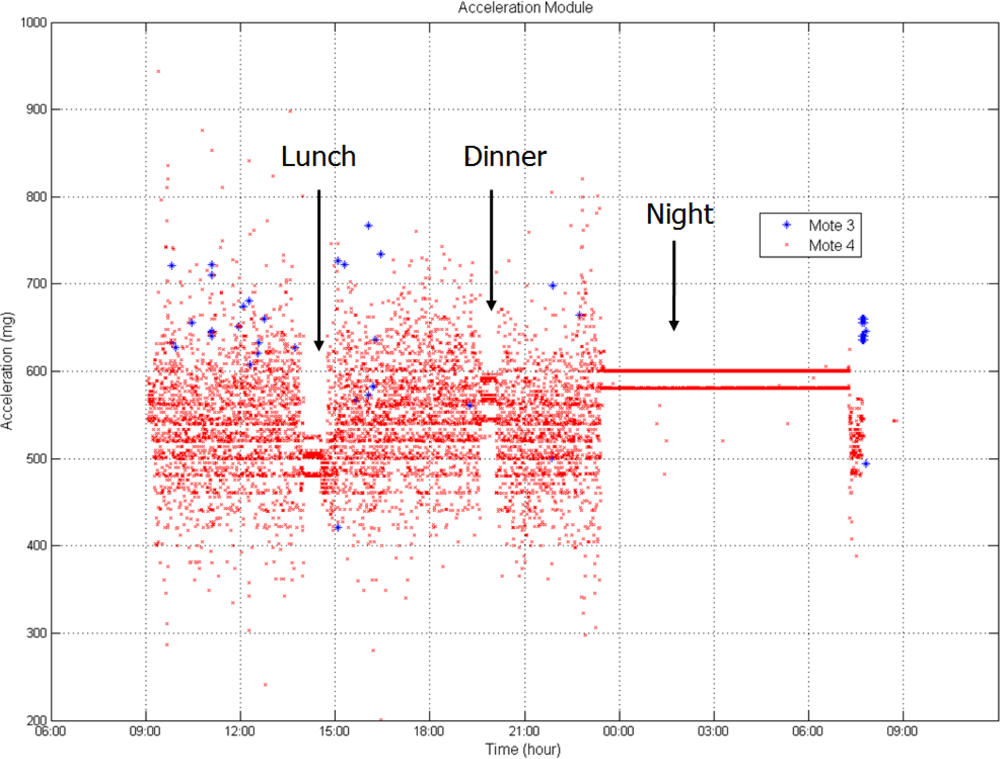
3.2. Transport Conditions
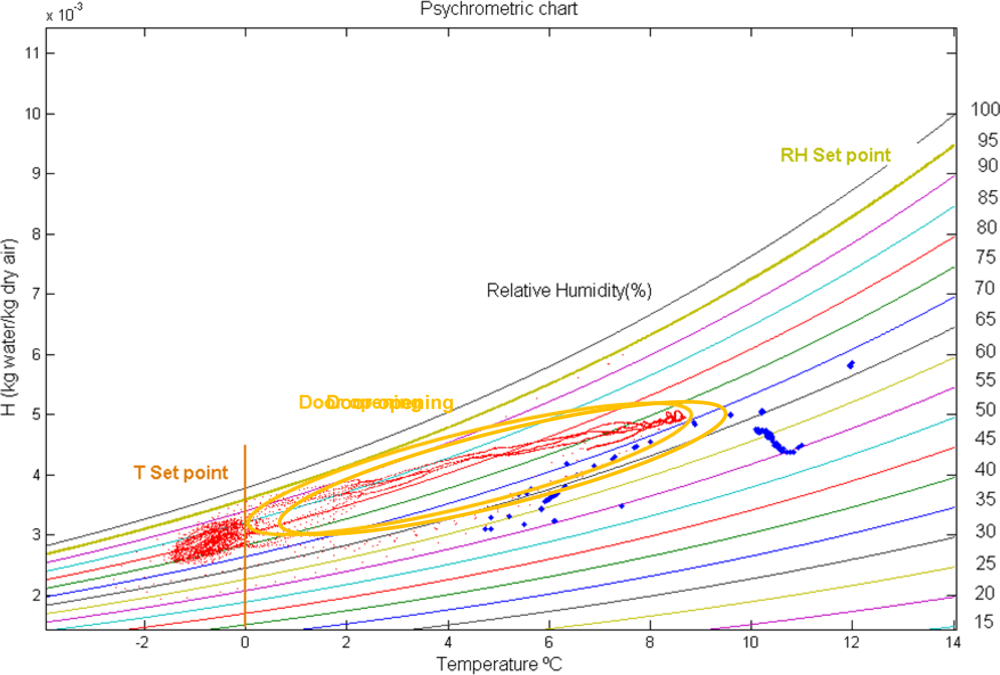
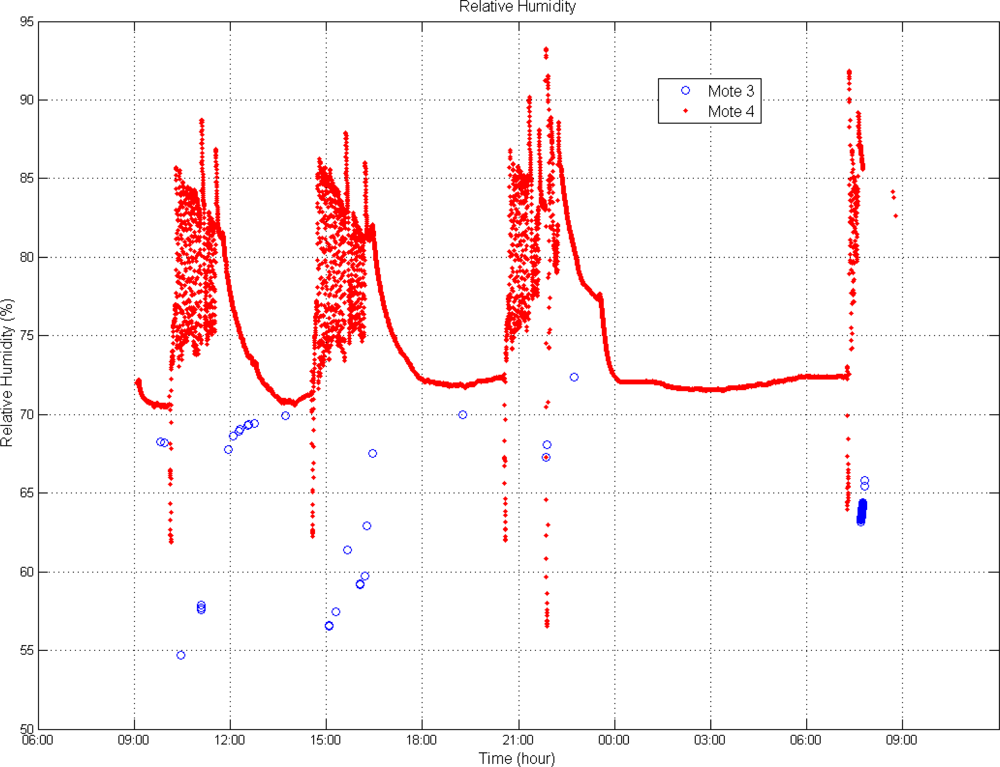
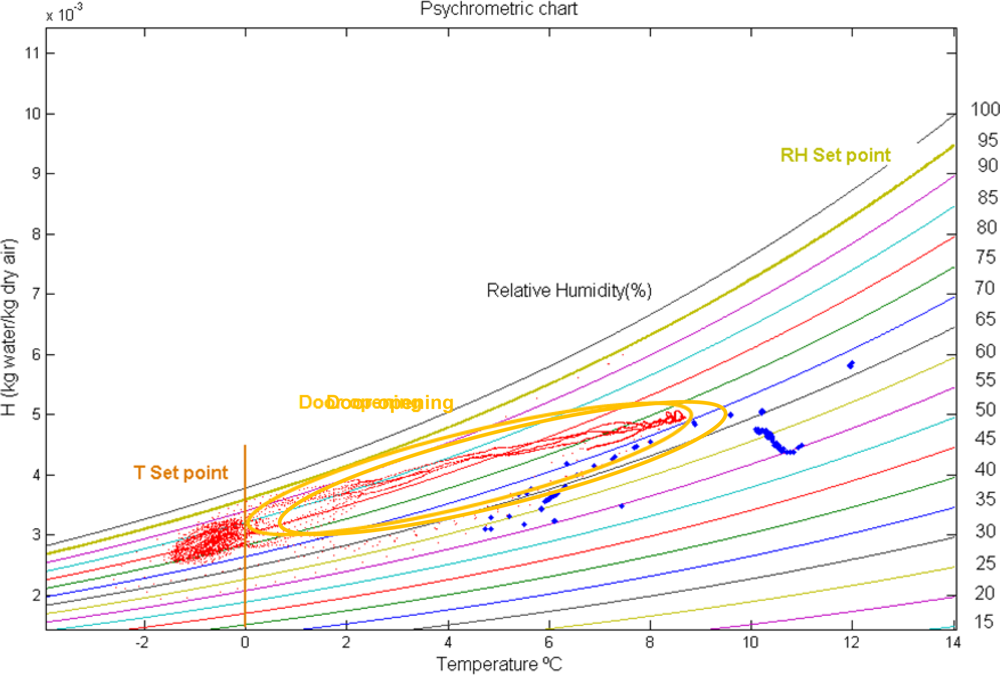
3.3. Psychrometry
4. Conclusions
Acknowledgments
References
- Tanner, D.J.; Amos, N.D. Heat and Mass Transfer-Temperature Variability during Shipment of Fresh Produce. Acta Horticulturae 2003, 599, 193–204. [Google Scholar]
- Nunes, M.C.N.; Emond, J.P.; Brecht, J.K. Brief deviations from set point temperatures during normal airport handling operations negatively affect the quality of papaya (Carica papaya) fruit. Postharvest Biol. Technol 2006, 41, 328–340. [Google Scholar]
- Rodríguez-Bermejo, J.; Barreiro, P.; Robla, J.I.; Ruiz-Garcia, L. Thermal study of a transport container. J. Food. Eng 2007, 80, 517–527. [Google Scholar]
- Ruiz-Garcia, L.; Lunadei, L. Monitoring cold chain logistics by means of RFID. In Sustainable Radio Frequency Identification Solutions; Turcu, C., Ed.; INTECH: Vienna, Austria, 2010; pp. 37–50. [Google Scholar]
- White, J. How Cold Was It? Know the Whole Story. Frozen Food Age 2007, 56, 38–40. [Google Scholar]
- Roy, P.; Nei, D.; Okadome, H.; Nakamura, N.; Shiina, T. Effects of cultivation, transportation and distribution methods on the life cycle inventory (LCI) of fresh tomato. Proceedings of ASABE/CSBE North Central Intersectional Conference, Saskatoon, SK, Canada, October 5–7, 2006.
- Tanner, D.J.; Amos, N.D. Modelling product quality changes as a result of temperature variability in shipping systems. Proceedings of International Congress of Refrigeration, Washington, DC, USA, August 17–22, 2003.
- Jedermann, R.; Ruiz-Garcia, L.; Lang, W. Spatia l temperature profiling by semi-passive RFID loggers for perishable food transportation. Comput. Electron. Agric 2009, 65, 145–154. [Google Scholar]
- Ruiz-Garcia, L.; Barreiro, P.; Rodríguez-Bermejo, J.; Robla, J.I. Monitoring intermodal refrigerated fruit transport using sensor networks: A review. Span. J. Agric. Res 2007, 5, 142–156. [Google Scholar]
- Shamaila, M. Water and its relation to Fresh produce. In Produce Degradation: Pathways and Prevention; Lamikanra, O., Imam, S.H., Eds.; CRC Press: Boca Raton, FL, USA, 2005; pp. 268–287. [Google Scholar]
- Qingshan, S.; Ying, L.; Gareth, D.; Brown, D. Wireless Intelligent Sensor Networks for Refrigerated Vehicle. Proceedings of IEEE 6th Symposium on Emerging Technologies Mobile and Wireless Communication, Shanghai, China, May 31–June 2, 2004.
- Wang, X.; Li, D. Value Added on Food Traceability: A Supply Chain Management Approach Service. Proceedings of IEEE International Conference on Service Operations and Logistics, and Informatics (SOLI’06), Shanghai, China, June 21–23, 2006; pp. 493–498.
- Jedermann, R.; Behrens, C.; Westphal, D.; Lang, W. Applying autonomous sensor systems in logistics-Combining sensor networks, RFIDs and software agents. Sens. Actuat. A-Phys 2006, 132, 370–375. [Google Scholar]
- Devore, J.L.; Farnum, N.R. Applied Statistics for Engineers and Scientists; Duxbury Press: Pacific Grove, CA, USA, 2004; pp. 394–398. [Google Scholar]
- ASABE. Psychrometric Data, ASAE D271.2, April 1979; ASABE: St. Joseph, MI, USA, 2006. [Google Scholar]
- Ruiz-Garcia, L.; Barreiro, P.; Robla, J.I. Performance of ZigBee-based wireless sensor nodes for real-time monitoring of fruit logistics. J. Food. Eng 2008, 87, 405–415. [Google Scholar]
- Montero-Garcia, F.; Brasa, A.; Montero, F. Seguimiento de Parámetros Agroambientales en Viñedo mediante Redes Inalámbricas de Sensores. Proceedings of V Congreso Nacional y II Congreso Ibérico AGROINGENIERÍA 2009, Lugo, Spain, September 28–30; 2009. [Google Scholar]
- Baggio, A. Wireless sensor networks in precision agriculture. Proceedings of Workshop on Real–World Wireless Sensor Networks (REALWSN’05), Stockholm, Sweden, June 2005.
- Haneveld, P.K. Evading Murphy: A Sensor Network Deployment in Precision Agriculture; Technical Report; Delft, The Netherlands, June 28 2007. [Google Scholar]
- Ipema, A.H.; Goense, D.; Hogewerf, P.H.; Houwers, H.W.J.; van Roest, H. Pilot study to monitor body temperature of dairy cows with a rumen bolus. Comput. Electron. Agric 2008, 64, 49–52. [Google Scholar]
- Nadimi, E.S.; Sogaard, H.T.; Bak, T.; Oudshoorn, F.W. ZigBee-based wireless sensor networks for monitoring animal presence and pasture time in a strip of new grass. Comput. Electron. Agric 2008, 61, 79–87. [Google Scholar]
- Zhou, G.; He, T.; Krishnamurthy, S.; Stankovic, J.A. Models and Solutions for Radio Irregularity in Wireless Sensor Networks. Acm Trans. Sens. Netw 2006, 2, 221–262. [Google Scholar]
- United States Frequency Allocations: The Radio Spectrum; U.S. Department of Commerce, National Telecommunications and Information Administration, Office of Spectrum Management: Washington, DC, USA, October 2003.
- ECC. The European Table of Frequency Allocations and Utilisations in the Frequency Range 9 Khz to 3000 Ghz in the Frequency Range 9 khz to 3000 Ghz; ECC (in CEPT): Copenhagen, Denmark, 2009. [Google Scholar]
- Mayer, K.; Ellis, K.; Taylor, K. Cattle health monitoring using wireless sensor networks. Proceedings of the Communication and Computer Networks Conference (CCN 2004), Cambridge, MA, USA, November 8–10, 2004.
- Yang, S.W.; Cha, H.J. An empirical study of antenna characteristics toward RF-based localization for IEEE 802.15.4 sensor nodes. Wirel. Sensor Netw. Proc 2007, 4373, 309–324. [Google Scholar]
- Cebik, L. Planar and Corner Reflectors Revisited. Available online: http://www.cebik.com/vhf/pcr.pdf/ (accessed on 9 May 2010).
- Su, W.; Alzaghal, M. Channel propagation characteristics of wireless MICAz sensor nodes. Ad Hoc. Netw 2009, 7, 1183–1193. [Google Scholar]
- Thiemjarus, S.; Yang, G. Context-aware sensing. In Body Sensor Networks; Yang, G., Ed.; Springer-Verlag London Ltd: London, UK, 2006; pp. 288–331. [Google Scholar]
- Wang, N.; Zhang, N.Q.; Wang, M.H. Wireless sensors in agriculture and food industry-Recent development and future perspective. Comput. Electron. Agric 2006, 50, 1–14. [Google Scholar]
- Craddock, R.J.; Stansfield, E.V. Sensor fusion for smart containers. Proceedings of IEEE Seminar on Signal Processing Solutions for Homeland Security, London, UK, April 5–7, 2005.
- Barchi, G.L.; Berardinelli, A.; Guarnieri, A.; Ragni, L.; Fila, C.T. Damage to loquats by vibration-simulating intra-state transport. Biosyst. Eng 2002, 82, 305–312. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| R = 22,105,649.25 |
| A = −27,405.526 |
| B = 97.5413 |
| C = −0.146244 |
| D = 0.12558 × 10−3 |
| E = −0.48502 × 10−7 |
| F = 4.34903 |
| G = 0.39381 × 10−2 |
| Mote | Type of Sensor | Type of Sensor*Mote | |
|---|---|---|---|
| Fishers’s F | 3,833.59 | 28.24 | 140.44 |
| Factor | RH | Pressure | Light | Acceleration |
|---|---|---|---|---|
| Node | 1,406.85 | 387.49 | 91.77 | 1,122.95 |
© 2010 by the authors; licensee MDPI, Basel, Switzerland. This article is an Open Access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Ruiz-Garcia, L.; Barreiro, P.; Robla, J.I.; Lunadei, L. Testing ZigBee Motes for Monitoring Refrigerated Vegetable Transportation under Real Conditions. Sensors 2010, 10, 4968-4982. https://doi.org/10.3390/s100504968
Ruiz-Garcia L, Barreiro P, Robla JI, Lunadei L. Testing ZigBee Motes for Monitoring Refrigerated Vegetable Transportation under Real Conditions. Sensors. 2010; 10(5):4968-4982. https://doi.org/10.3390/s100504968
Chicago/Turabian StyleRuiz-Garcia, Luis, Pilar Barreiro, Jose Ignacio Robla, and Loredana Lunadei. 2010. "Testing ZigBee Motes for Monitoring Refrigerated Vegetable Transportation under Real Conditions" Sensors 10, no. 5: 4968-4982. https://doi.org/10.3390/s100504968