1. Introduction
Recent advances in MEMS (Micro Electro Mechanical Systems) and microprocessor and wireless communication technologies have enabled the deployment of large-scale sensor networks, where thousands or even tens of thousands of small sensors are distributed over a vast field to obtain sensing data. Sensor networks have attracted significant attention as important infrastructure for data collection in an environment for pervasive computing. In this field, wireless sensor networks play a special role in home automation, environmental monitoring, military, health, and other applications.
In particular, wireless sensor networks have important applications in hazardous areas such as battle fields or disaster areas, where access by humans is difficult. However, in addition to being dangerous for humans, the hazards in these areas might also threaten sensor nodes, which are often physically fragile. Usually, sensor nodes are designed to be cheap, very small, and use very limited resources. Therefore, they should not be regarded as strong enough to resist a physical impact. This fragile characteristic of sensor nodes makes a wireless sensor network vulnerable to the hazards in such areas. If some of the sensor nodes in a wireless sensor network deployed in a hazardous area become damaged and can no longer work properly, the data from the area covered by these damaged sensor nodes cannot be collected properly. Therefore, these sensor nodes should be repaired or covered by other sensor nodes.
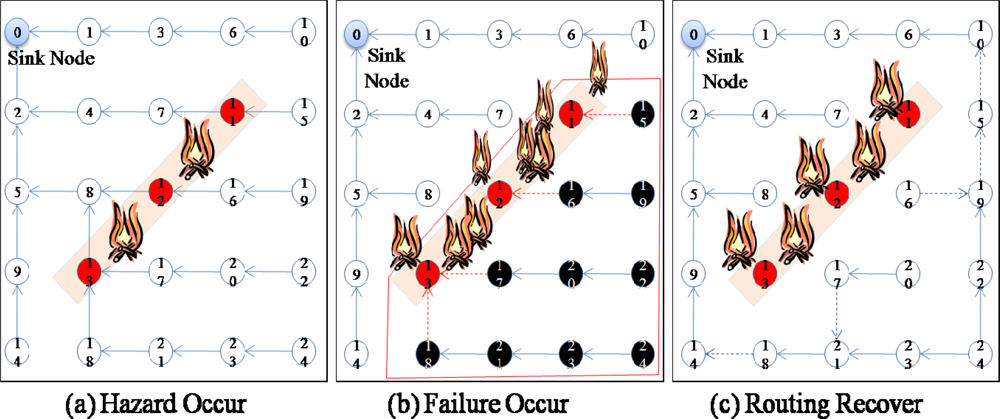
Moreover, the damaged sensor nodes could also obstruct the sink node from collecting data from behind the area of the damaged sensor nodes because these sensor nodes are not only data sources but also routing (relaying) nodes for other source nodes. For example, in
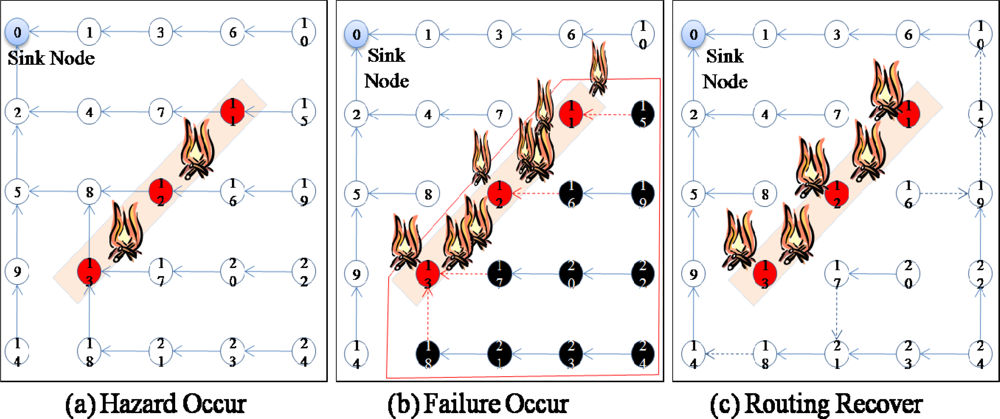
Figure 1, when a hazard (fire) occurs in the sensor network (
Figure 1a), some sensor nodes (sensor nodes 11–13) fail, and thus, these nodes are no longer able to forward data from other sensor nodes (sensor nodes 15–24) in the lower part of the routing tree (
Figure 1b). In this case, although only 3 sensor nodes (sensor nodes 11–13) fail and the child nodes (sensor nodes 15–24) of these sensor nodes are still working properly, packets from the child nodes (sensor nodes 15–24) are not able to arrive at the sink node because the parent nodes (sensor nodes 11–13) have failed. Data from the child nodes (sensor nodes 15–24) should be delivered to the sink nodes, and therefore, the routing paths should be reestablished using the available nodes connected to a sink node to recover from the failure (
Figure 1c). Hence, for reliable data transfer, routing protocols should be aware of failures and have the ability to recover from them quickly.
Node failures in a large area can be regarded as a routing hall in the geographic routing protocol which works based on the geographic coordinates and thus be recovered fast since the geographic routing protocol usually has the ability to detour the routing hall. However, the geographic routing requires that sensor nodes have to know their location on the network field. Localization of a sensor node is in need of a special device to estimate the location such as GPS or Ultra Sound Emitter which is expensive or has the limited usage. On the other hand, the tree based routing protocols doesn’t require any special device and thus can be used in any case without additional cost. As a consequence, the tree based routing protocol is still used in many area and the node failures in tree based routing can be a big problem. Therefore, we concentrate to the node failures in large area with tree based routing protocol.
Usually, routing protocols for wireless sensor networks have the ability to recover from the failure of a sensor node. In these protocols, if a sensor node cannot receive messages from surrounding nodes for a specified period of time, the sensor node is classified as a failed node and thus excluded from the routing path. In the case of the failure of a single node, this mechanism works properly without much overhead. However, if more than two sensor nodes fail in the same area, as shown in
Figure 1, this mechanism might not work because the other nodes might not find a path to the sink. Therefore, the rapid recovery from large-scale failures should be considered when designing routing protocols.
Fast recovery from large failures has mainly been studied for geographic routing protocols. In geographic routing protocols, packets are forwarded based on geographic coordinates, and therefore, node failures should not be a big problem because sensor nodes do not maintain a routing table, but just forward packets based on the coordinates and available neighbor nodes. Large-scale node failures might affect the routing process momentarily, but packets would be forwarded through normal sensor nodes toward a sink node. However, tree-based routing protocols usually only consider single node failure recovery methods, which are not scalable for large-scale failures. Tree-based routing could be much more affected by large-scale failures because sensor nodes choose the next node to forward a packet based on cumulated information. Moreover, in tree-based routing, sensor nodes do not have a view of the whole network. Therefore, sensor nodes that are confused due to failures might not be able to quickly find a new path to the correct nodes. Thus, fast recovery from large failures should also be considered in tree-based routing.
Failure recovery in tree-based routing mainly depends on the transmission intervals for routing control messages, which include information on the node and link states. The time needed to recover from the failed routing should be proportional to the interval for routing control messages. Sensor nodes should exchange routing control messages quickly in the case of failure. However, because transmitting routing control messages requires large energy consumptions by sending and receiving nodes, most routing protocols set up a long transmission interval for routing control messages to reduce the energy consumption. As a consequence, it takes a long time for a network to recover when a routing tree is collapsed by node failures in conventional tree-based routing methods. To quickly recover the collapsed routing tree in an energy-efficient manner, the transmission interval for the routing control messages should be sufficiently long to reduce the energy consumption under normal conditions, while routing control messages should be exchanged quickly enough to recover from a failed routing path when several nodes fail concurrently.
This paper proposes a routing protocol called ARF (Adaptive routing protocol for fast Recovery from large-scale Failure). This protocol is energy efficient, yet provides rapid recovery from a failed routing tree covering a large area. ARF detects a node failure by counting the packet losses from neighbor nodes. If a sensor node has not listened to its neighboring sensor nodes for a specified period, that sensor node is regarded by its neighbor sensors as a failed node and is removed from the neighbor table. In a case where the parent node of a sensor node has failed, ARF tries to find a new parent in the neighbor table. When there is no candidate for a parent in the neighbor tree, ARF labels the sensor node as an orphan and shortens the transmission interval for routing control messages to notify the neighbor nodes that it is an orphan. If a sensor node receives a routing control message with an orphan notification and it has a reliable parent, then the sensor node also shortens its routing transmission interval to aid the orphan node. If an orphan node receives a routing control message from a proper parent node, then the orphan node regards the routing control message source node as its new parent node and returns to the long transmission interval. Our experimental results indicated clearly that ARF could recover from large-area failures quickly with less packets than previous protocols. In the next section, we will review related studies. Section 3 describes ARF, and Section 4 provides a performance evaluation. We conclude the paper in Section 5.
3. ARF
3.1. Architecture
We consider a densely deployed wireless sensor network such that each sensor node has one or more sensing devices. A sensor node frequently transfers the sensed data to a sink node or gateway. Sensor nodes should control the data transmission interval in an inverse proportion to the variation in a phenomenon. A tree-based routing protocol is used to construct the path from sensor nodes to the sink node. The path to the sink node can be changed whenever the link states to the upper nodes are unreliable due to node failure or obstacles. The lower nodes in a routing tree have to compete with other nodes for an upper node in a routing tree. We assume that sensor nodes are always awake, however a sensor node can go to sleep frequently if the transition frequency is known to others with presetting or routing control message.
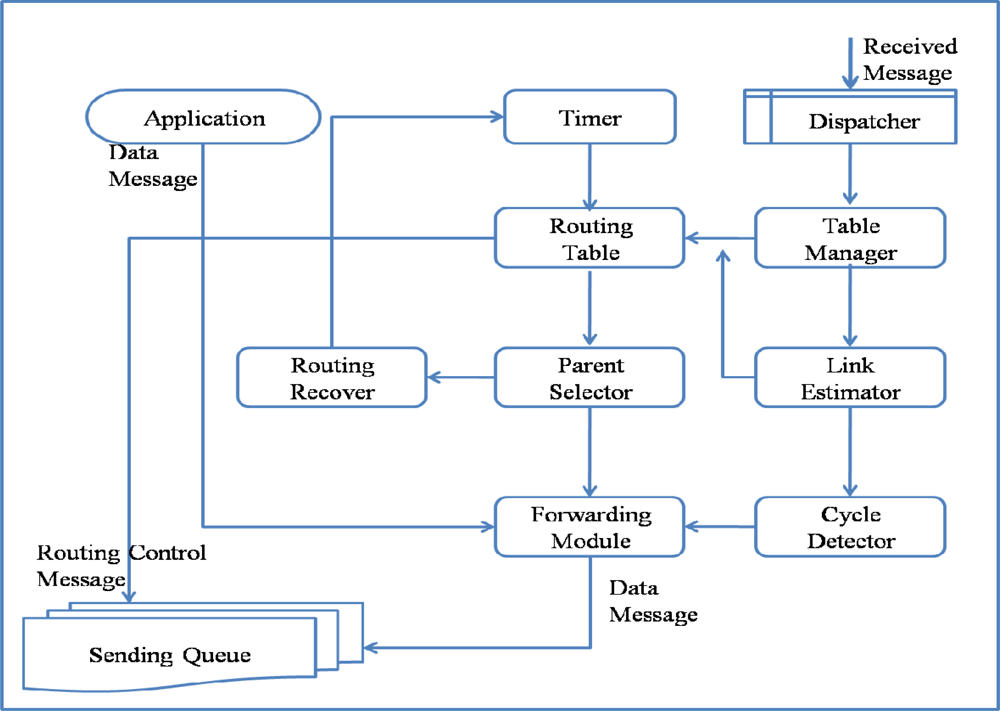
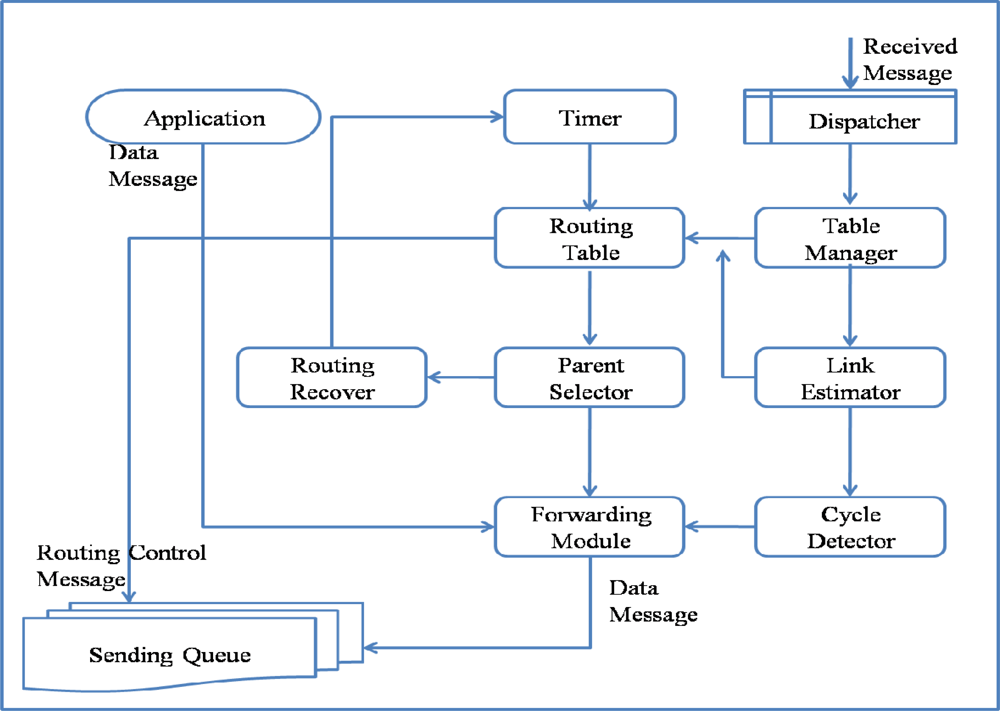
The architecture and operation of ARF is similar to other tree-based routing methods, except for its routing recovery, which is designed to allow the routing tree to recover from large-scale failures. ARF consists of a Routing Table, Table Manager, Link Estimator, Parent Selector, Cycle Detector, Forwarding Module, Routing Recoverer, Timer, and Dispatcher, as listed in
Table 1.
Routing Table maintains a list of neighbor sensor nodes, routing information, and link quality. The Routing Table in ARF consists of the Node ID, Hop Count, Parent ID, Transfer Packets, Received Packets, Packet Sequence, Lost Packets, Link Quality, and Orphan Flag, as listed in
Table 2. The Hop Count is used to find the shortest path to a sink node. A neighbor sensor node with the smallest Hop Count becomes a parent node. The Parent ID is used to detect and prevent a loop or cycle. Transfer Packets is the number of packets sent to the neighbor node successfully. Received Packets is the number of packets received from the neighbor node, which are either data messages or routing control messages. The Transferred Packets and Received Packets are used by the Link Estimator to compute the Link Quality. The Packet Sequence is updated with the sequence field of a data message and used to detect a packet loss. Whenever a packet loss is detected by comparing the sequence numbers, the number of Lost Packets increases. Orphan Flag is used to represent the Orphan state. If a sensor node does not have a parent node, the sensor node is classified as an orphan node. The Routing Table is used when the Parent Selector chooses a parent.
The Routing Table is updated by the Table Manager and Link Estimator whenever a message is received. The received message could be a data message or a routing control message. If it is a data message, the Received Packets and Packet Sequence of the Routing Table entry that contains information about the node that sent the received message are updated by the Table Manager. In addition, if the difference in the packet sequences of the current packet and last packet is more than 1, Lost Packets is updated. If it is a routing control message, it contains state information about the sending node; thus, the Table Manager not only updates the message receive count but also other attributes such as the Hop count and Parent ID. If a sensor node has not received any packet from a neighbor node, the Table Manager classifies the neighbor node as a failed node and evicts the neighbor node from the Routing Table.
The Link Estimator computes the link qualities to neighbor nodes based on the Transferred Packets, Received Packets, and Lost Packets. The Cycle Detector detects a loop or cycle. When a packet sent by the sensor node itself is received by the sensor node again, it is regarded as a loop or cycle and the packet is dropped. The Forwarding Module transfers data packets from its own higher applications or from a child node toward the parent node. For reliable transmission, the Sending Queue is used. The Timer is used to set the intervals for routing control messages, link estimation, and parent selection. The Timer interval can be changed by the Routing Recoverer. The Parent Selector chooses a parent node with the smallest hop count and highest link quality. If there is no proper node for a parent node, the Parent Selector sets the node as an Orphan and starts the Routing Recoverer. The Routing Recoverer sets up a short routing interval for the rapid spread of the orphan notification by changing the Timer period.
Figure 2 shows the operation of ARF. A packet could be a data message generated by the application layer of the node itself, a routing control message generated by the Routing Table, or a message received from a neighbor node. A data packet from the application layer is directly input to the Forwarding Module, which simply sets the parent ID field using the parent ID in the Routing Table and puts it into the Sending Queue. The Routing Table generates a routing control message at the transmission interval for routing control messages, as controlled by the Timer. A routing control message contains information extracted from the Routing Table. A routing control message is inserted directly into the Sending Queue with a broadcast address and thus could be received by neighbor nodes. A received message is dispatched by the Dispatcher from the Receive Queue and is either a routing control message or a data message. All of the messages transmitted around a sensor node should be received by overhearing for link estimation and failure detection. Both received routing and data messages are used by the Table Manager to update the Routing Table. A received data message that has passed through the Cycle Detector filter is input to the Forwarding Module and Sending Queue.
3.2. Routing Recovery
For fast routing recovery, the Parent Selector and Routing Recoverer of ARF work differently from conventional routing protocols. In a conventional routing protocol, the Parent Selector selects the sensor node with the lowest hop count and highest link quality. ARF does something similar. However, in a conventional routing protocol, if a sensor node does not receive packets from the parent node for a specified period, the parent node is removed from the Routing Table and a new parent node is selected from the remaining neighbor nodes. If all of the nodes at the upper level of the routing tree fail, conventional routing protocols choose a node at same level as the sensor node itself, or even at a lower level. If packet transmission toward all of the neighbor nodes is unsuccessful, routing is regarded as failed. As a result, it takes a long time to detect routing failures in conventional routing protocols.
On the other hand, in ARF, the Parent Selector chooses a parent only from the group of nodes with the lowest hop count. Because we assume a densely deployed sensor network, a sensor node could have several nodes with the same hop count. If all of the nodes with the lowest hop count have failed, the Parent Selector in ARF regards itself as an orphan node without a parent node and sets its parent node id and hop count to predefined maximum values. With the modified Parent Selector, ARF can detect a failure at the upper level of a routing tree faster than conventional routing protocols.
Routing recovery in ARF is simply based on the control of the transmission interval for routing control messages. In a conventional routing protocol, the transmission interval is fixed at very large value to reduce the energy consumption due to message transmission. However, a conventional routing protocol with this long fixed interval cannot recover a routing tree destroyed by large-scale failure because the notification of the routing tree’s destruction is spread very slowly. Moreover, even when notification of the routing tree destruction arrives at a sensor node with the proper routing tree, the new routing tree is implemented slowly because long intervals are used to transfer routing control messages with the proper tree information. Therefore, for fast routing recovery, routing control messages with the destruction information and proper routing tree should be transferred quickly in the case of failures.
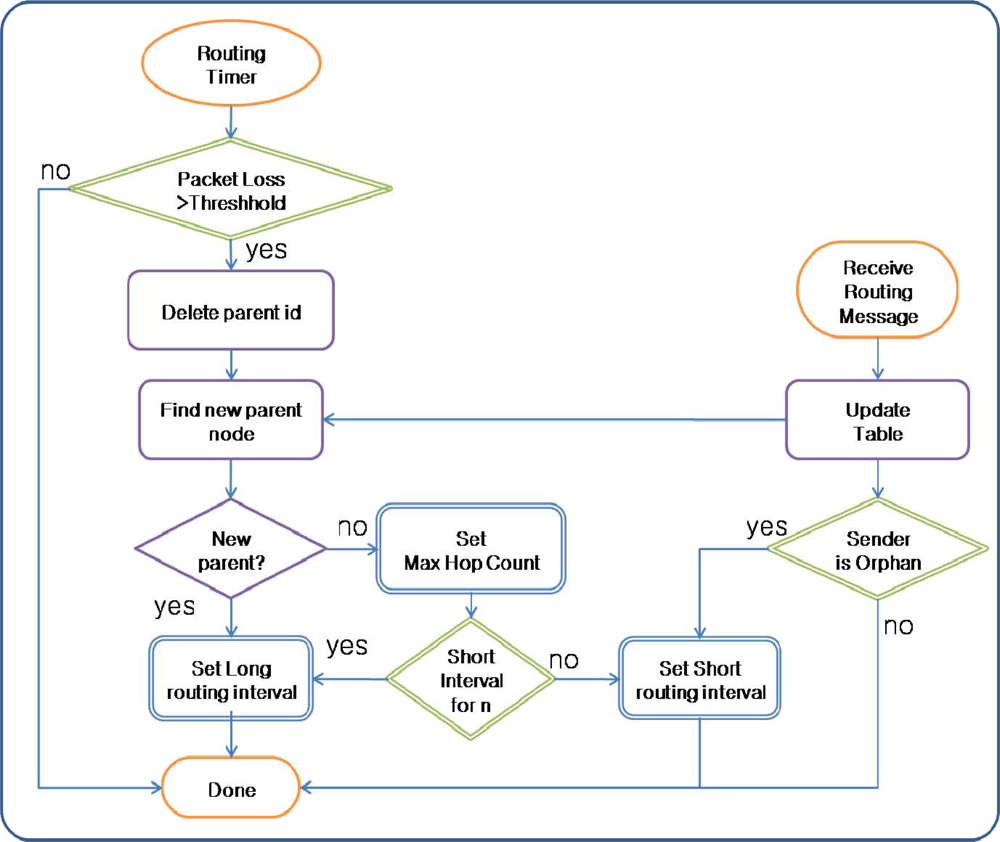
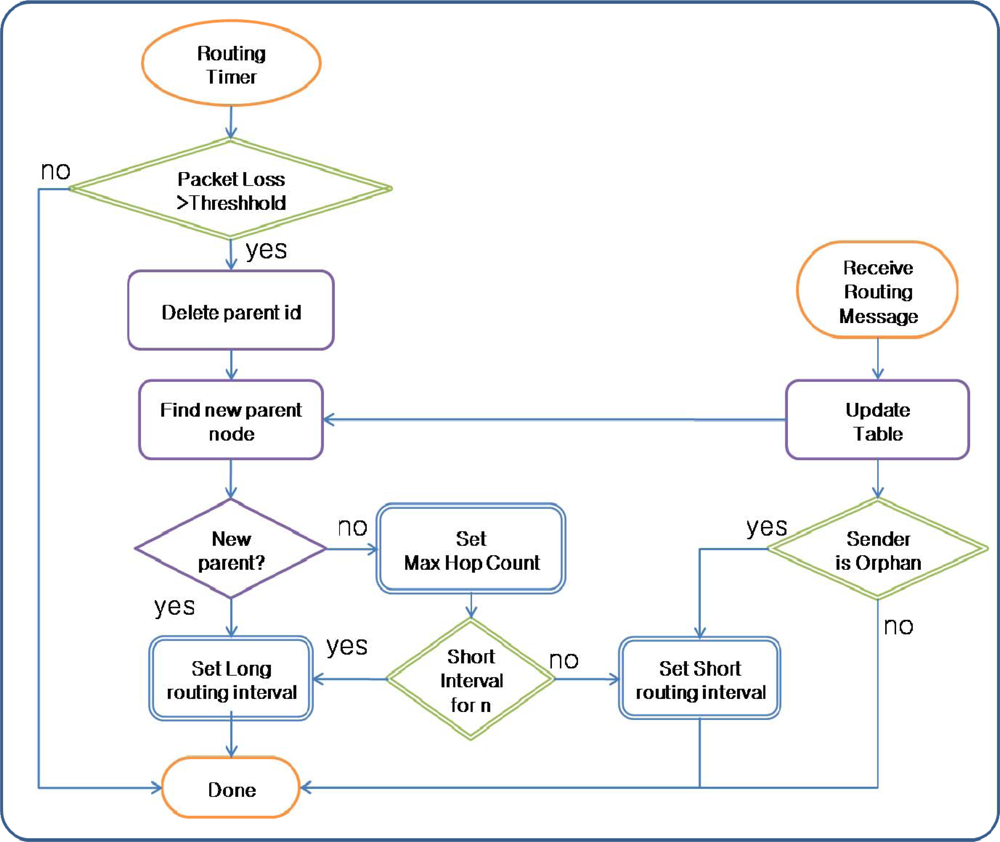
The transmission interval for routing control messages is controlled adaptively based on the routing state by the Route Recoverer in ARF. The transmission interval for routing control messages is given a long value to reduce the energy consumption under normal circumstances. If the Parent Selector cannot find a parent node in the routing table and the sensor node becomes an orphan node, the Parent Selector starts the Routing Recoverer. The Routing Recoverer sets up a short transmission interval, allowing the routing control message with the Orphan Flag to be transmitted very frequently. Therefore, the failure notification spreads to neighbor nodes quickly. However, to reduce the energy consumption, this short interval is used for a predefined count. In addition, if a sensor node with a correct parent node in the proper routing tree receives a routing control message with an orphan flag, the Routing Recoverer in the sensor node shortens the transmission interval. Therefore, the destroyed routing tree is recovered quickly.
Figure 3 shows the routing recovery in ARF.
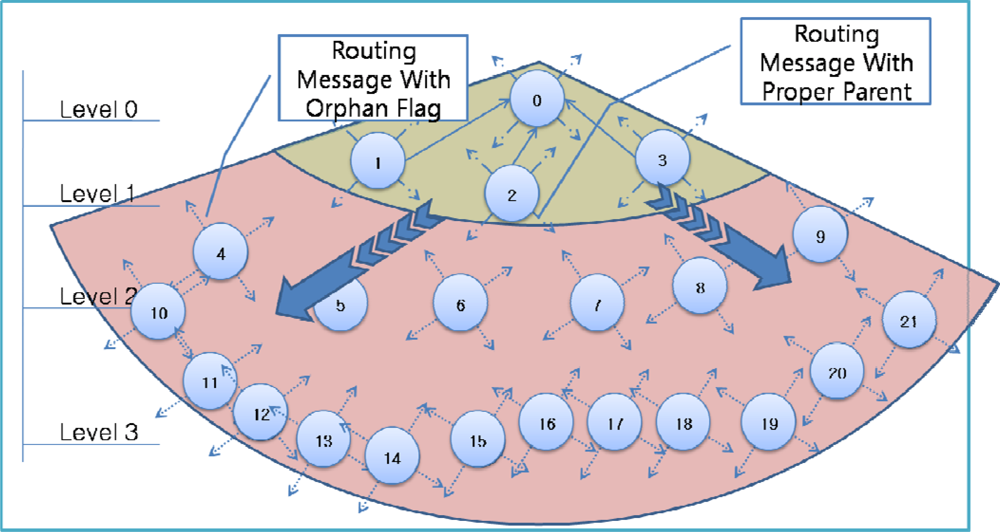
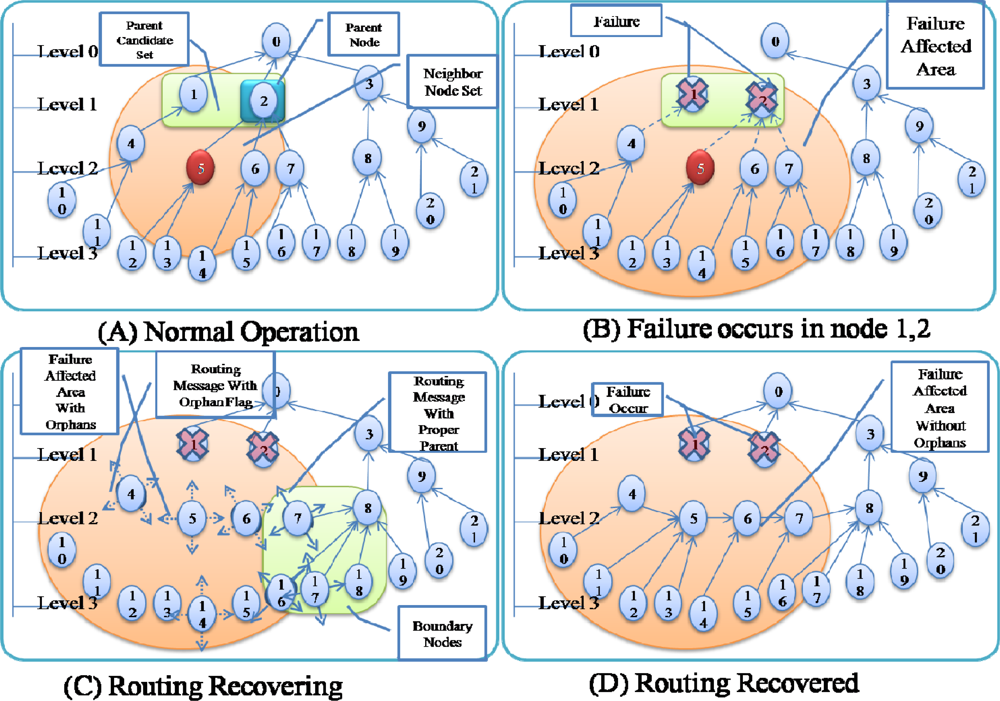
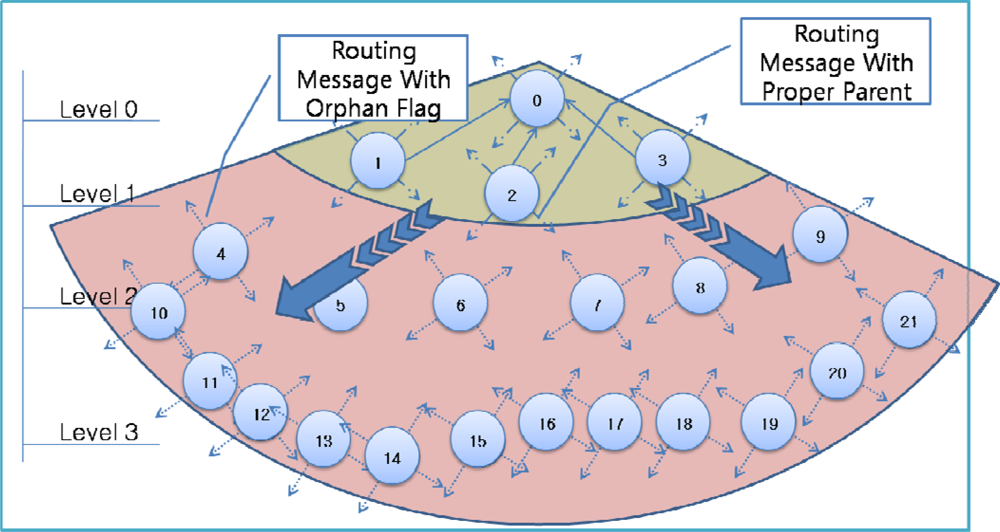
Figure 4 shows an example of failure occurrence and recovery. Node 0 is a sink node and the levels of the other nodes are based on the hop count from the sink node: nodes 1–3 are in level 1, nodes 4–9 are in level 2, and nodes 10–21 are in level 3. For example, node 5 has two nodes in the upper level (level 1)–nodes 1 and 2–as a parent candidate set and selects node 2 as a parent node (
Figure 4A). If nodes 1 and 2 in the upper level fail simultaneously, node 5 cannot find a parent node and sets itself as an orphan node (
Figure 4B). Other child nodes of nodes 1 and 2 (nodes 4, 6, 7) in the routing tree also become orphan nodes, and thus routing control messages with orphan flags from these child nodes are transmitted quickly. The child nodes of orphan nodes (nodes 10–15) also become an orphan node and thus transmit a routing control message with orphan flag. If a routing control message with an orphan flag is received by a sensor node with a proper parent node at the boundary of the area affected by the failure, the sensor node shortens its transmission interval (
Figure 4C). As routing control messages with proper routing tree information are propagated through the failure affected area, orphan nodes are able to recover the routing tree (
Figure 4D).
As shown in
Figure 4, even if only a few nodes (just 2 nodes in
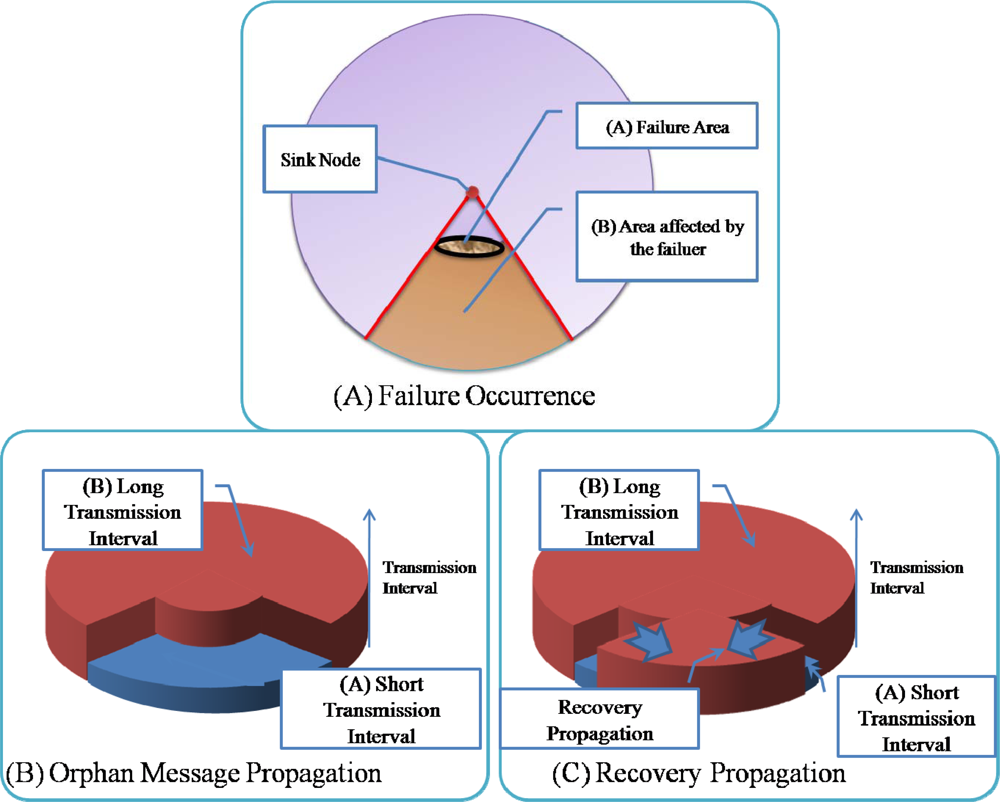
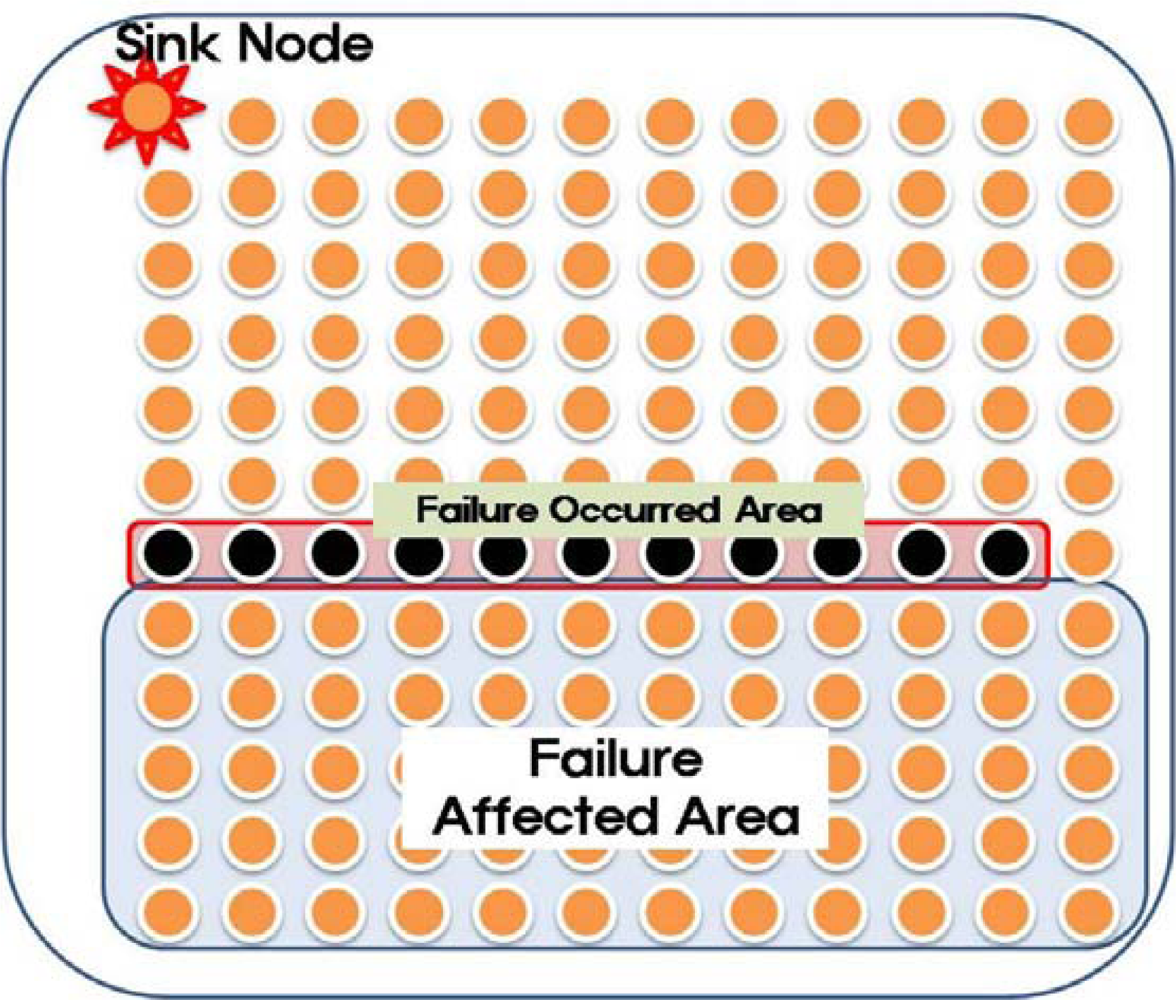
Figure 4) fail, numerous child nodes are affected. Sensor nodes at a higher level of the routing tree affect a larger area when they fail (as shown in
Figure 5A). In this case, even if routing control messages are transferred quickly from the area with the destroyed routing tree during routing recovery, the routing recovery speed would not be very great. Moreover, the increased number of routing control messages might slow down the recovery speed due to routing control message collisions. To reduce the overhead, ARF restricts the transmission of routing control messages with orphan flags by using short intervals with a predefined count. Therefore, the transmission interval in an area with a destroyed routing tree is set to a short value only while routing control messages with orphan flags are propagated (as shown in
Figure 5B). If routing control messages arrive at the boundary area, sensor nodes with proper parents begin to transmit routing control messages with short intervals, and do so until they stop receiving routing packets with orphan flags. Given routing control messages with proper parent nodes, orphan nodes near the boundary could recover from the destroyed routing tree. The boundary moves further toward the center of the affected area, and therefore, the routing tree is reconstructed from the boundary area to the center of the failure affected area (
Figure 5C).
The running time of our ARF algorithm is influenced by finding Parent node and implementation of the routing tree. The initialization of fields takes O (V) time where V is the number of average number of neighbor sensor nodes of a sensor node. The operation of computing the link quality takes O (lgV) time. The weight assignment operation takes O (1) time and in fully connected network a node has at most |V − 1| edges. The finding parent candidate Set operation in get Parent procedure takes O (lgV) time. As a node can have maximum V − 1 edges, the loop in get parent runs V − 1 times in a worst case. So the worst case running time of get Parent procedure is O (V lgV). The loop in Routing Tree Reconstruction is executed |V | times and these make a total of O (V 2lgV) running our ARF algorithm.
3.3. Fast Initialization
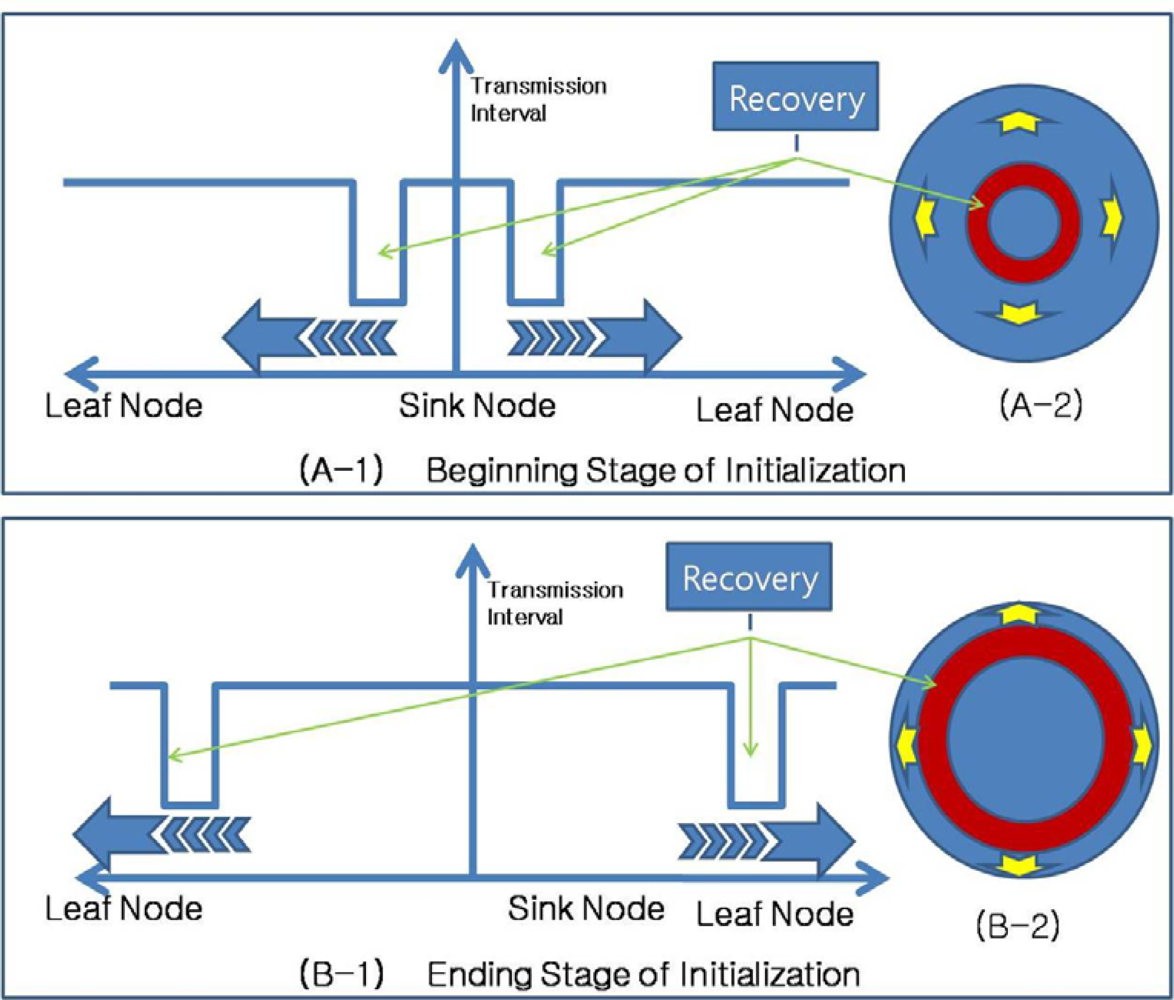
When sensor nodes are initially deployed, they do not have routing information. As routing control messages from a sink node are propagated through the network, a routing tree is constructed. With conventional routing protocols, it takes a very long time to construct a proper routing tree that includes every sensor node. This time increases in proportion to the size of the sensor network, with more sensor nodes in the network requiring more time for routing tree construction. ARF could reduce the construction time needed for a routing tree. This initial stage without a proper routing tree could be regarded as the failure of the entire sensor network. In this case, only the sink node has the proper routing tree and all of the other nodes are orphans. Therefore, the other nodes shorten their routing control message transmission intervals and propagate routing control messages with orphan flags. Sensor nodes around the sink node can receive routing control messages directly from the sink node and select the sink node as a parent node. After that, these nodes start the Routing Recoverer, which transfers routing control messages with the proper parent, as shown in
Figure 6. This operation is spread from the sink node to leaf nodes.
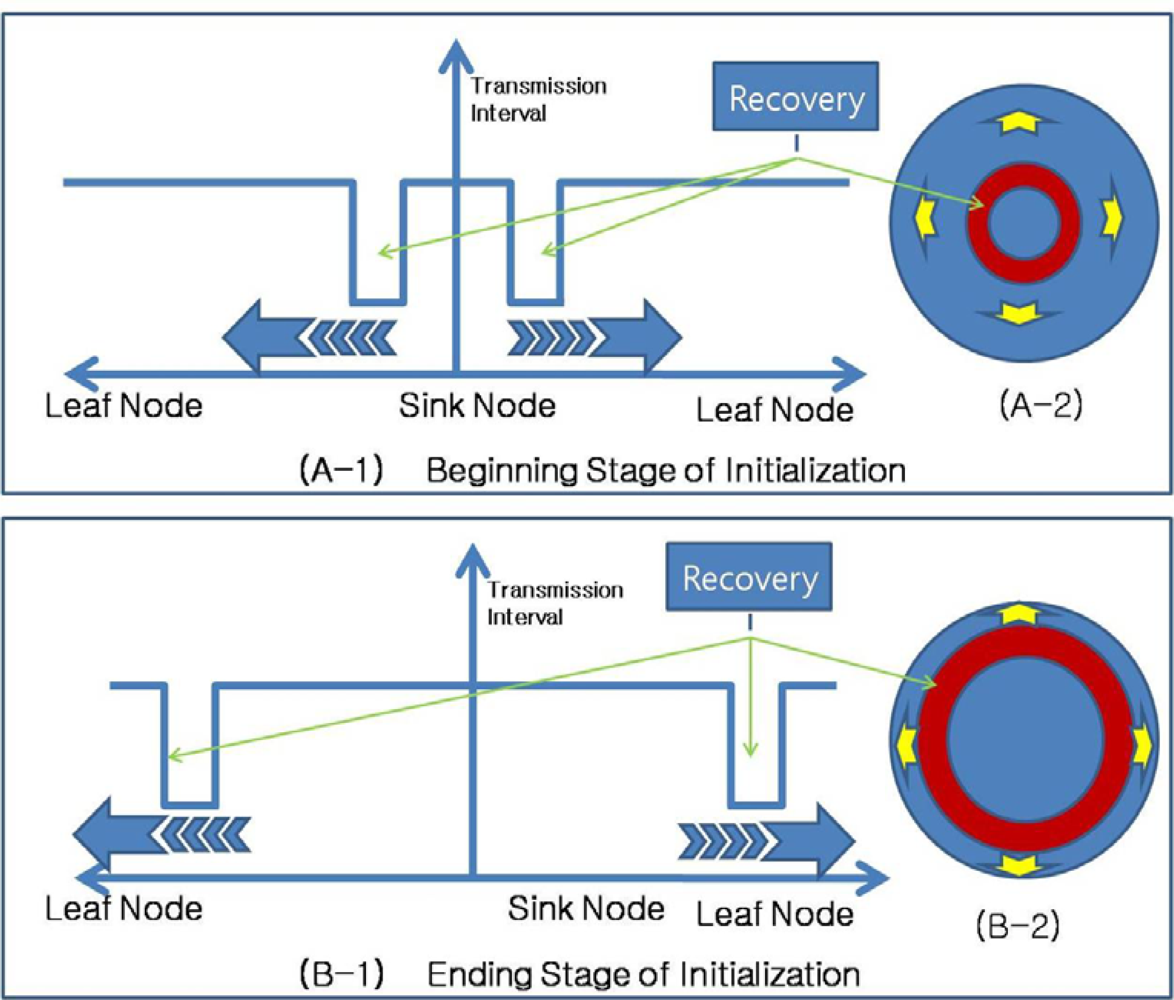
Figure 7 shows the propagation of routing recovery at network initialization, with the sink node at the center of the circle shaped network. At the beginning stage of initialization, sensor nodes near the sink node become boundary nodes and shorten their transmission intervals, while sensor nodes far from the sink node set long transmission intervals. As the routing tree is constructed, the boundary moves toward the outside of the network, and therefore, the routing recovery process using the short intervals also moves toward the outside.
For the routing control message transmissions from a sensor node to neighbor sensor nodes, CSMA is used to reserve the channel. We assume that each node knows the number of contending neighbor nodes (m) and contends the channel with the optimal probability p = 1/m. The probability that one contending node wins the channel is p
succ = (1 − 1/m)
m−1. Since the number of slots needed until the successful reservation is a geometric random variable, the average number of contending slots (ACS) is given by:
where M is the Average number of Neighbor nodes.
The transmission interval of routing control message is T, the average transmission time of routing message in single hop (ATS) is T + ACS and the total propagation time of routing control message from a sink node to a leaf sensor node in level L (TPT) is:
The initialization time of a routing tree is in proportion to the number of level L and the routing interval T and thus decreasing the routing interval T can decrease the initialization time of routing tree when the number of level L is fixed.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}