A Schedule-based Multi-channel MAC Protocol for Wireless Sensor Networks

Abstract
:1. Introduction
2. Related Works
3. Network Model, Assumption and Problem Statement
3.1. Network Model and Assumption
3.2. Problem Statement
4. Proposed Multi-channel MAC Protocol
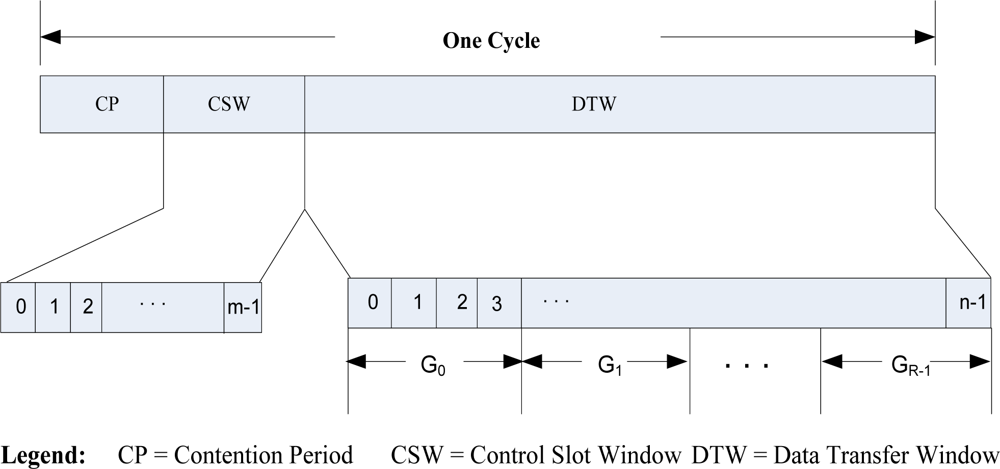
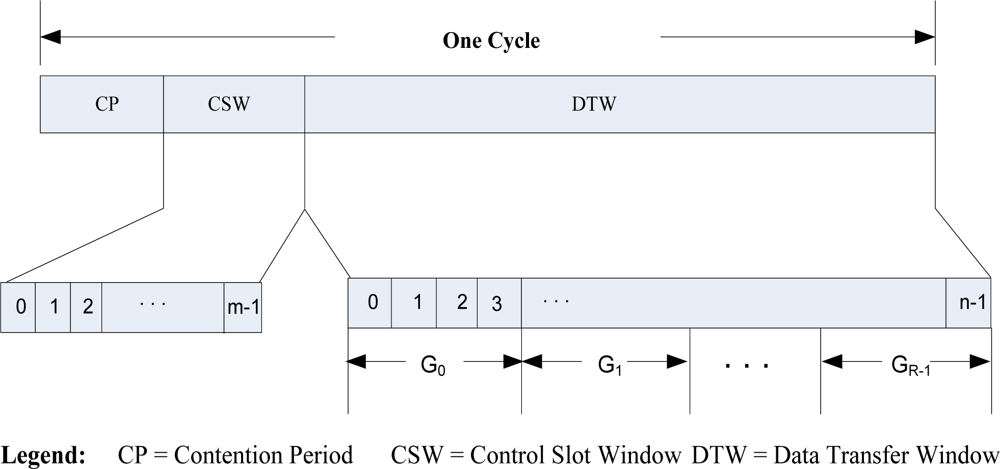
4.1. Cycle Structure
4.2. Scheduling Transmission
- Sender[n]
- Receiver[n]
- Node: stores information of a node:
- recvChannel /*receiving channel */
- s /* order in the CSW */
- channel[nc] /*nc = no of channels*/

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| y = s mod R; | /*select the group*/ |
| f = min(0≤i < m), where i mod R = y | |
| Pos = s/R; | /*Position in group*/ |
| for k = Pos–1 down to f do | |
| if noder does not have slot allocation information of any node having order k in its 2-hop neighborhood then | |
| break; | |
| end if | |
| end for | |
| NoInfo = k – f– 1; | |
| AssignSlots(nodei,Gy, NoInfo); | |
| Broadcast nodei.Channel to the one hop neighbors. | |
| start = group*Gsize; | /* Gsize = total slots in a group */ |
| SafetySpace = NoInfo*ns; | /* ns = maximum number of intended senders of a node */ |
| start = start + SafetySpace; | |
| end = start + Gsize – 1; | |
| for each receiving node noder of nodei do | |
| for slot = start to end do | |
| if neither nodei nor noder has a previous entry in slot then | |
| ch = noder.recvChannel; | |
| if there is no entry for channel ch in slot | then |
| nodei.Channel[ch].Sender[slot] = i; | |
| nodei.Channel[ch]. Receiver [slot] = r; | |
| break; | /* Try the next receiving neighbor */ |
| end if | |
| end if | |
| end for | |
| end for | |
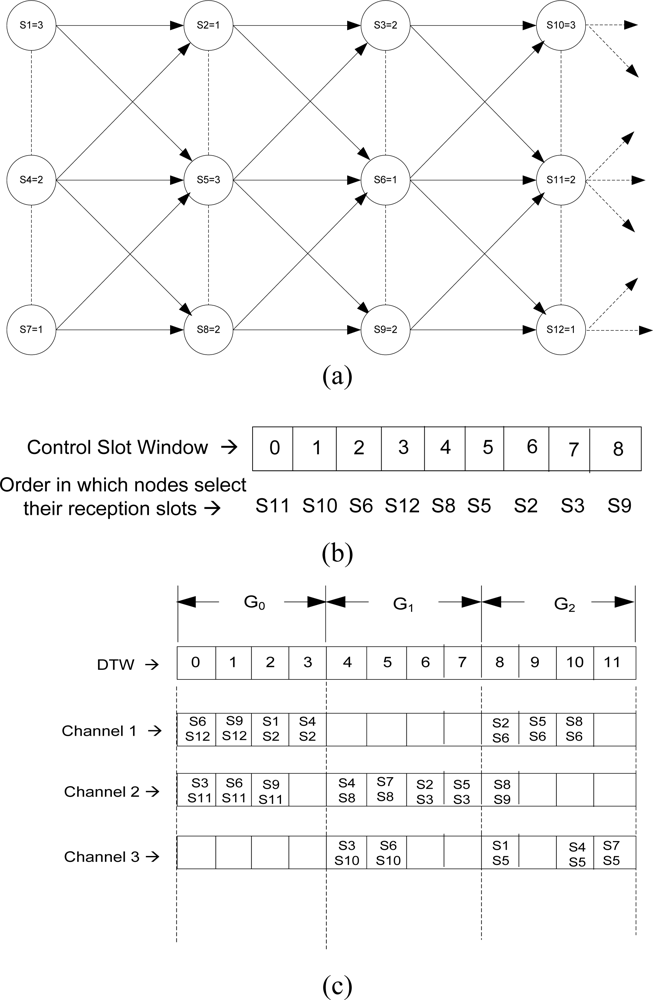
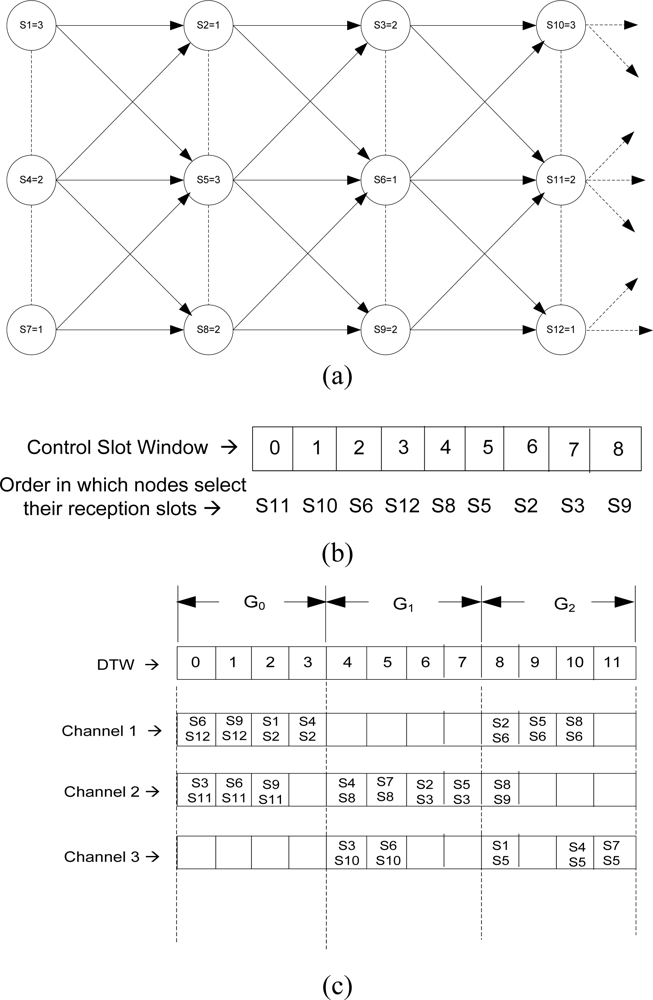
4.3. Scheduling Example
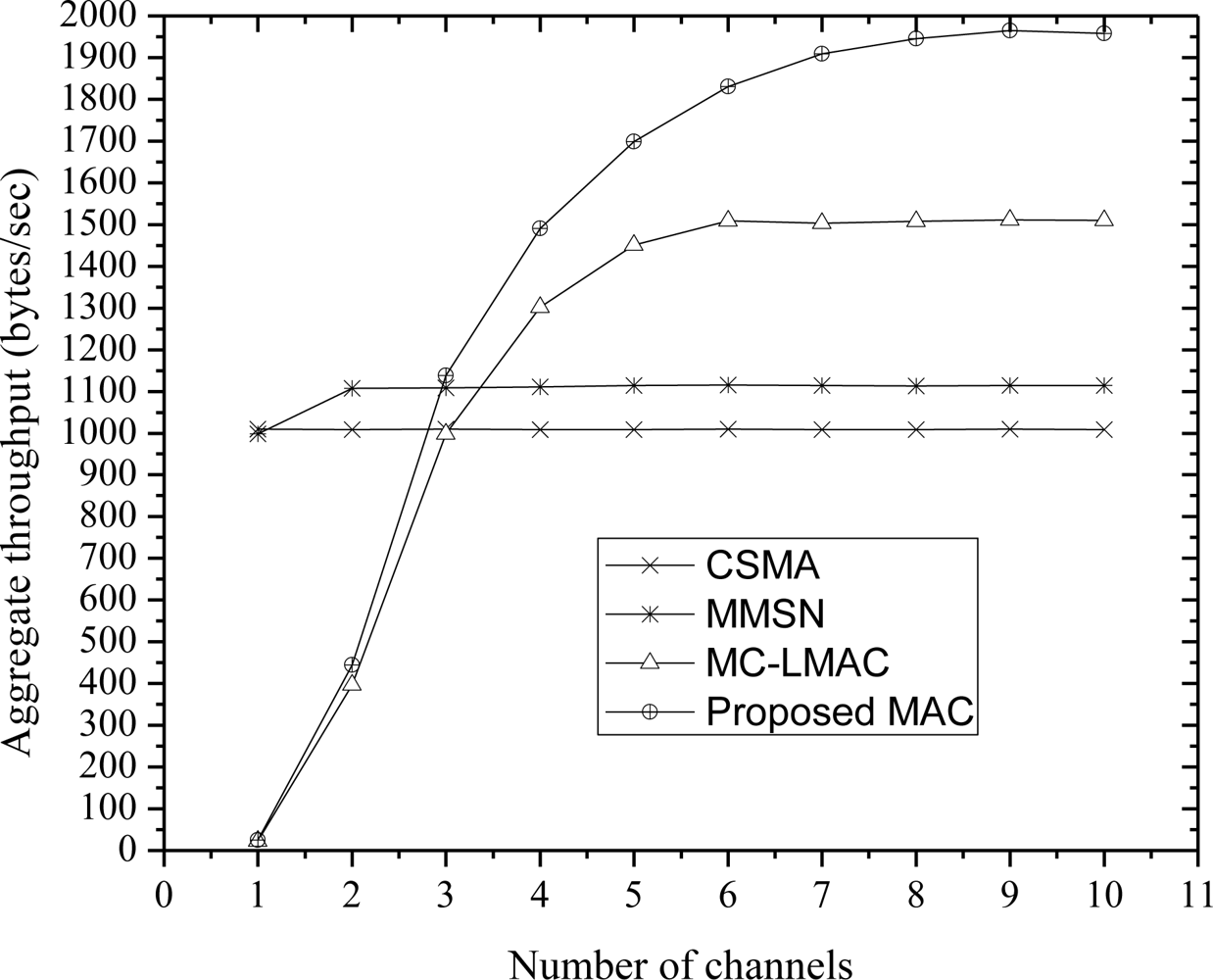
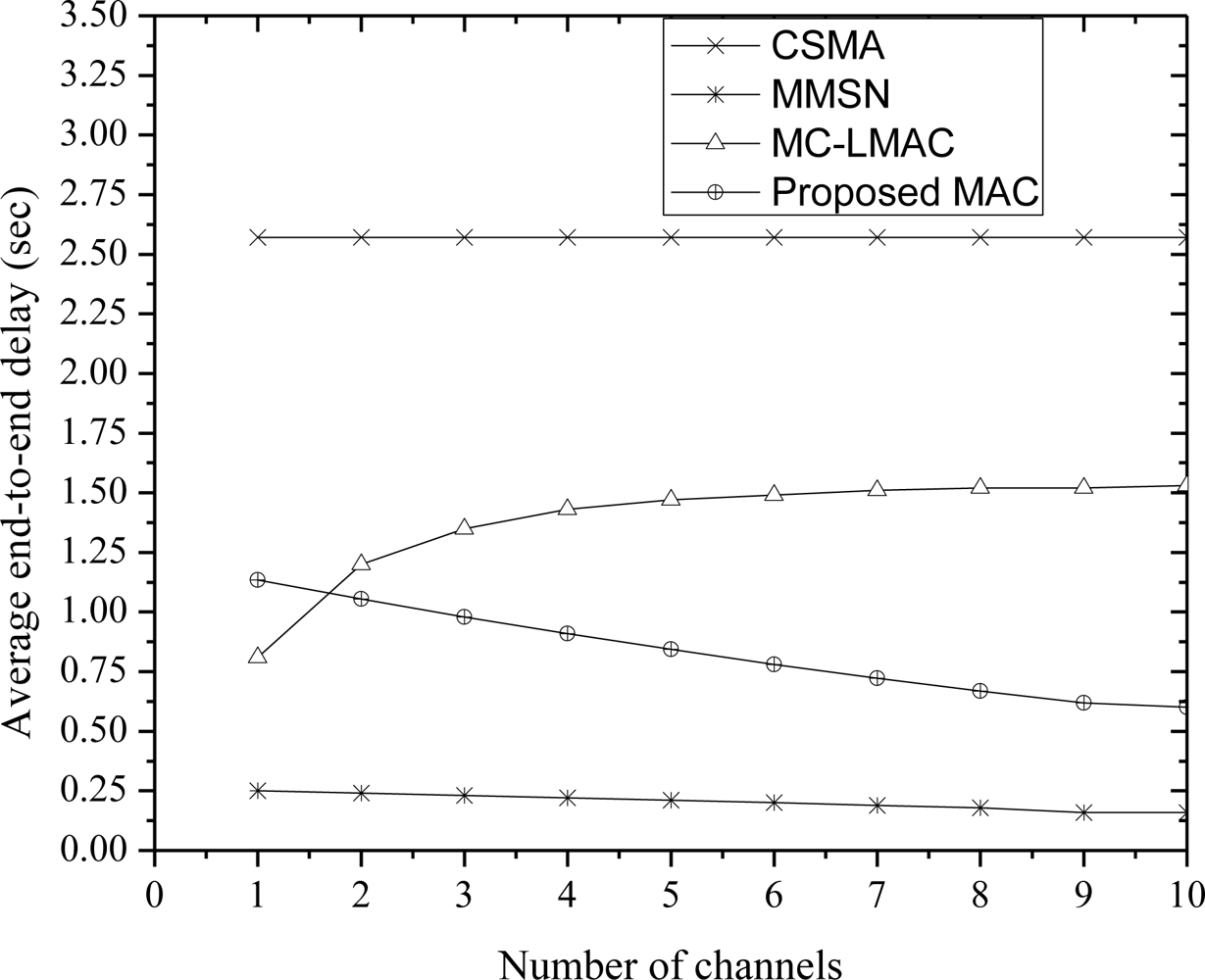
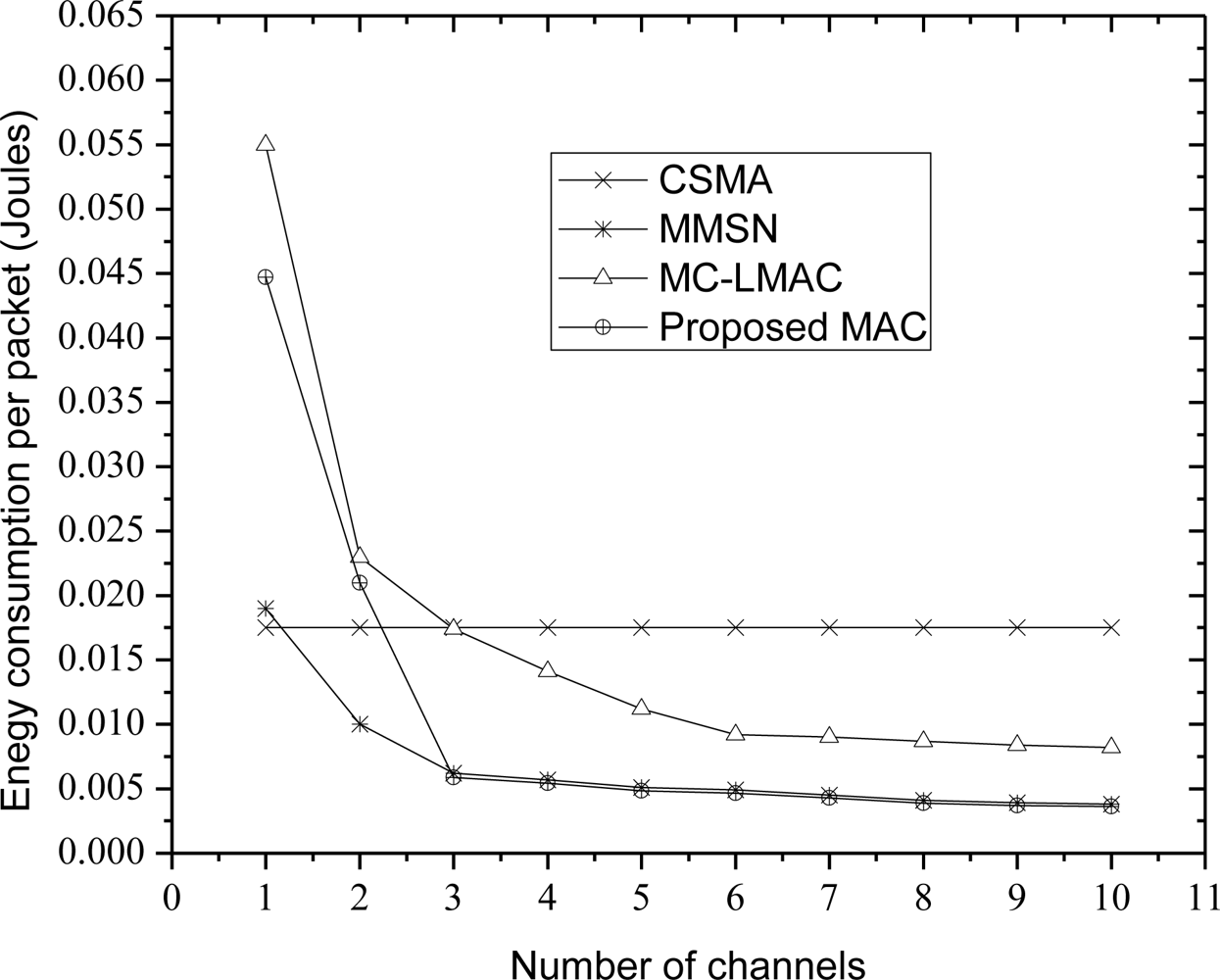
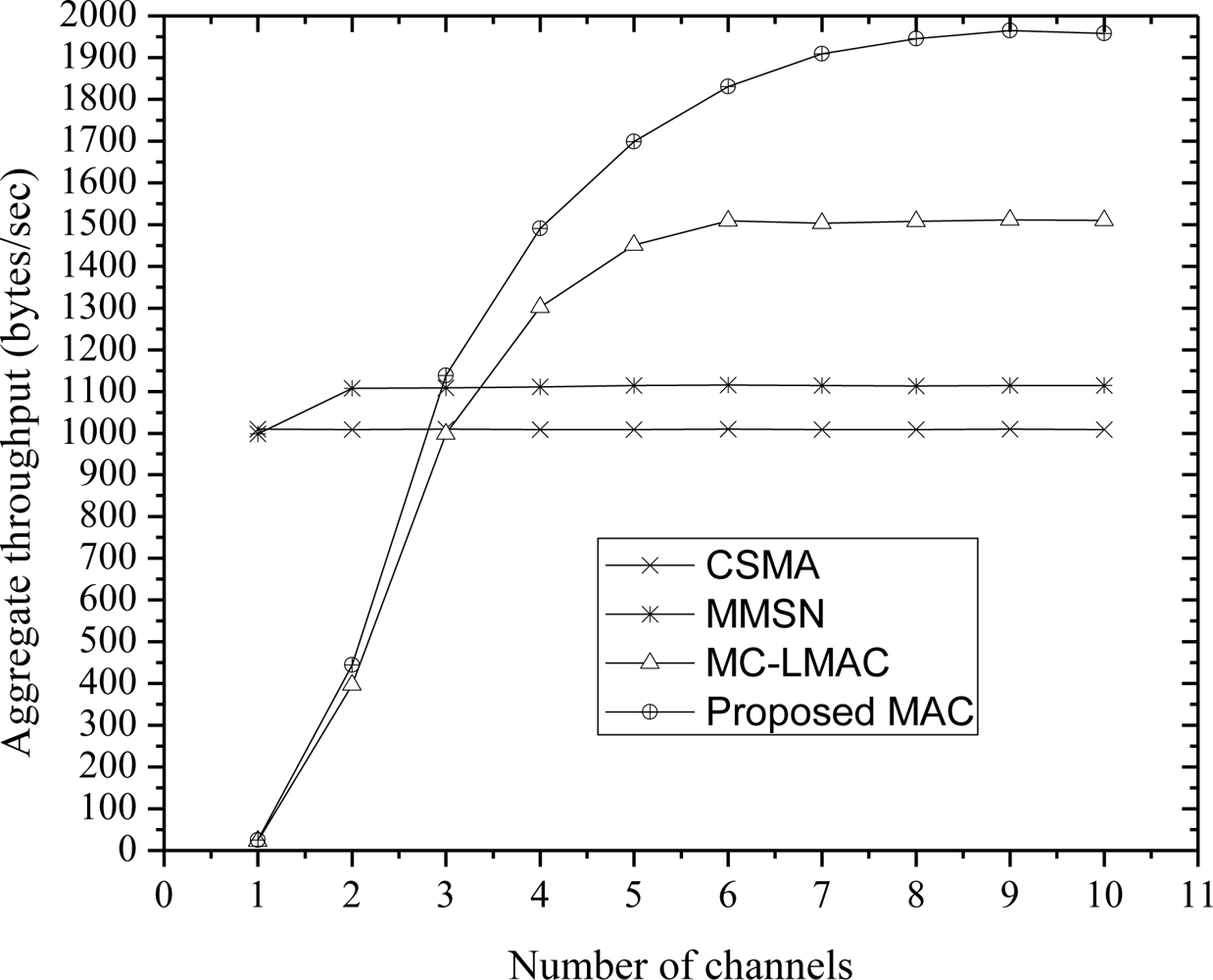
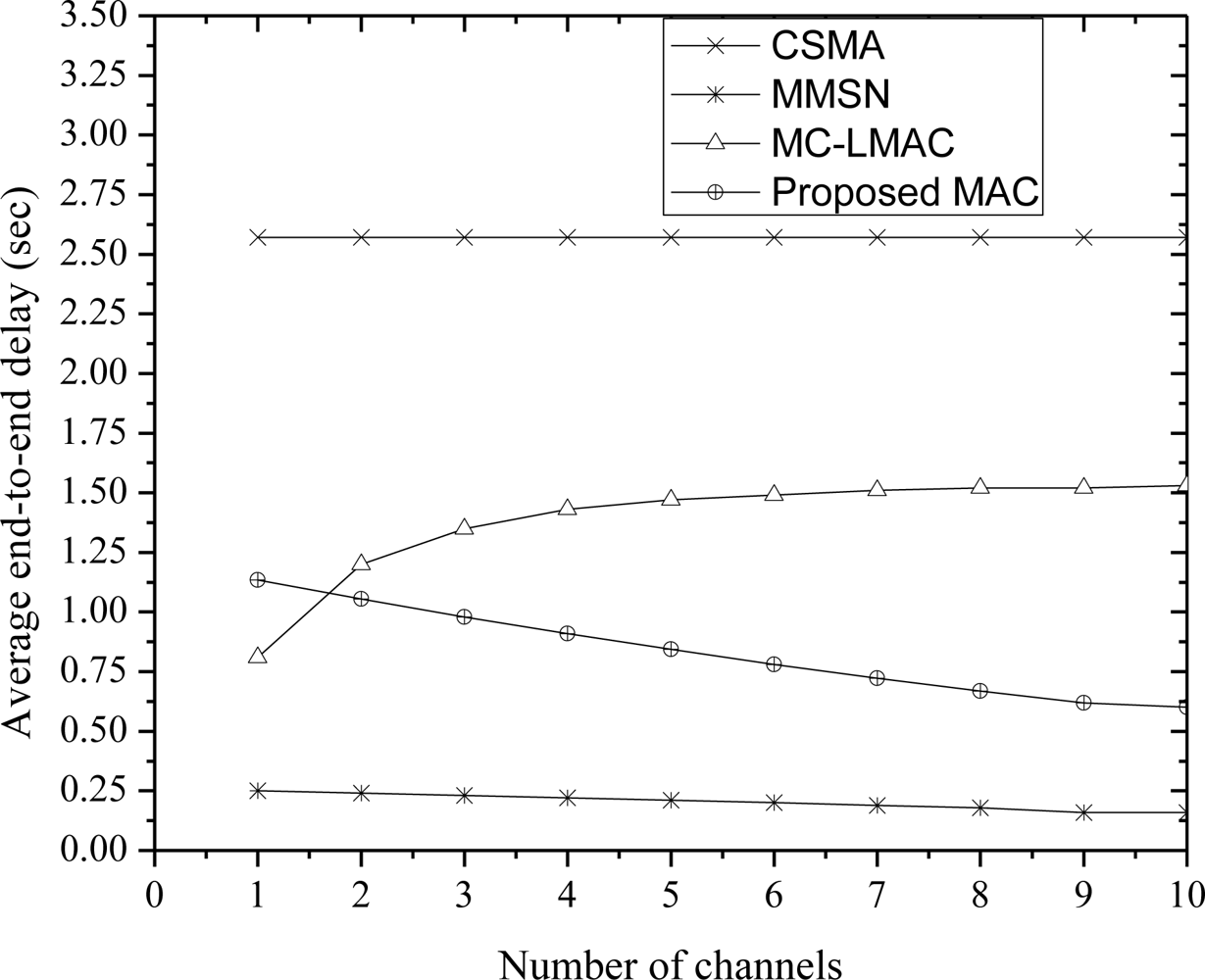
5. Performance Evaluation
6. Conclusions
Acknowledgments
References
- Akyildiz, IF; Su, W; Sankarasubramaniam, Y; Cayirci, E. Wireless sensor networks: A survey. Comput Netw 2002, 38, 393–422. [Google Scholar]
- Akyildiz, IF; Melodia, T; Chowdhury, KR. A survey on wireless multimedia sensor networks. Comput. Netw 2007, 51, 921–960. [Google Scholar]
- Gurses, E; Akan, OB. Multimedia communication in wireless sensor networks. Ann. Telecommun 2005, 60, 799–827. [Google Scholar]
- Cruller, D; Estrin, D; Srivastava, M. Overview of sensor networks. IEEE Comput 2004, 37, 41–49. [Google Scholar]
- Polastre, J; Hill, J; Culler, D. Versatile Low Power Media Access for Wireless Sensor Networks. Proceedings of ACM Conference on Embedded Networked Sensor Systems, November 3–5, 2004; Baltimore, MD, USA.
- El-Hoiyi, A; Decotignie, JD; Hernandez, J. Low Power MAC Protocols for Infrastructure Wireless Sensor Networks. Proceedings of the Fifth European Wireless Conference, Barcelona, Spain, February 24–27, 2004.
- Ye, W; Heidemann, J; Estrin, D. An Energy-Efficient MAC Protocol for Wireless Sensor Networks. Proceedings of IEEE International Conference on Computer Communications, New York, NY, USA, June 23–27, 2002; pp. 1567–1576.
- Dam, T; Langendoen, K. An Adaptive Energy-Efficient MAC Protocol for Wireless Sensor Networks. Proceedings of ACM Conference on Embedded Networked Sensor Systems, Los Angeles, CA, USA, November 5–7, 2003; pp. 171–180.
- Woo, A; Culler, D. A Transmission Control Scheme for Media Access in Sensor Networks. ACM International Conference on Mobile Computing and Networking (MobiCom), Rome, Italy, July 16–21, 2001.
- Rajendran, V; Obraczka, K; Garcia-Luna-Aceves, JJ. Energy-Efficient, Collision-Free Medium Access Control for Wireless Sensor Networks. Proceedings of ACM Conference on Embedded Networked Sensor Systems, Los Angeles, USA, November 5–7, 2003.
- van Hoesel, L; Nieberg, T; Wu, J; Havinga, P. Prolonging the lifetime of wireless sensor networks by cross layer interaction. IEEE Wirel. Commun. Mag 2005, 11, 78–86. [Google Scholar]
- Hill, J; Szewczyk, R; Woo, A; Hollar, S; Culler, D; Pister, K. System Architecture Directions for Networked Sensors. Proceedings of The 9th International Conference on Architectural Support for Programming Languages and Operating Systems, Cambridge, MA, USA, November 12–15, 2000; pp. 93–104.
- XBOW MICA2 Mote Specifications. Available online: http://www.xbow.com. (accessed on June 25, 2009).
- Polastre, J; Szewczyk, R; Culler, D. Telos: Enabling Ultra-Low Power Wireless Research. Proceedings of ACM/IEEE Fourth International Symposium on Information Processing in Sensor Networks (IPSN), Berkeley, CA, USA, April 15, 2005.
- Miller, MJ; Vaidya, NH. A MAC Protocol to Reduce Sensor Network Energy Consumption Using a Wakeup Radio. Proceedings of IEEE Transactions on Mobile Computing, Urbana, IL, USA, May–June, 2005; 4, pp. 228–242.
- So, J; Vaidya, N. Multi-Channel MAC for Ad-Hoc Networks: Handling Multi-Channel Hidden Terminals Using a Single Transceiver. Proceedings of ACM International Symposium on Mobile Ad Hoc Networking & Computing (MobiHoc), Tokyo, Japan, May 24–26, 2004.
- Tzamaloukas, A; Garcia-Luna-Aceves, JJ. A Receiver-Initiated Collision-Avoidance Protocol for Multi-Channel Networks. Proceedings of Twentieth Annual Joint Conference of the IEEE Computer and Communications Societies (IEEEINFOCOM), Anchorage, AK, USA, April 22–26, 2001.
- Zhou, G; Huang, C; Yan, T; He, T; Stankovic, J; Abdelzaher, T. MMSN: Multi-Frequency Media Access Control for Wireless Sensor Networks. Proceedings of ACM Conference on Embedded Networked Sensor Systems, Boulder, CO, USA, October 31–November 3, 2006.
- Incel, OD; Dulman, S; Jansen, P. Multi-channel Support for Dense Wireless Sensor Networking. Proceedings of European Conference on Smart Sensing and Context (EUROSSC), Enschede, The Netherlands, October 25–27, 2006; LNCS 4272. pp. 1–14.
- Chen, X; Han, P; He, QS; Tu, S; Chen, ZL. A Multi-Channel MAC Protocol for Wireless Sensor Networks. Proceedings of the Sixth IEEE International Conference on Computer and Information Technology, Seoul, Korea, September 20–22, 2006.
- Durmaz, Incel, O; Jansen, PG; Mullender, SJ. MC-LMAC: A Multi-Channel Mac Protocol for Wireless Sensor Networks. In Technical Report TR-CTIT-08-61; Centre for Telematics and Information Technology, University of Twente: Enschede, The Netherlands, 2008. [Google Scholar]
- Wu, Y; Stankovic, J; He, T; Lin, S. Realistic and Efficient Multichannel Communications in Wireless Sensor Networks. Proceedings of International Conference on Computer Communications, Phoenix, AZ, USA, April 13–18, 2008; pp. 1193–1201.
- Langendoen, K; Halkes, G. Energy-efficient Medium Access Control. In Embedded Systems Handbook; Zurawski, R, Ed.; CRC Press: London, UK, 2005; Chapter 34. [Google Scholar]
- Demirkol, I; Ersoy, C; Alagoz, F. Mac protocols for wireless sensor networks: A survey. IEEE Commun. Mag 2006, 44, 115–121. [Google Scholar]
- Rhee, I; Warrier, A; Aia, M; Min, J. Z-mac: A Hybrid Mac for Wireless Sensor Networks. Proceedings of the 3rd International Conference on Embedded Networked Sensor Systems (SenSys), New York, NY, USA, November 2–4, 2005; pp. 90–101.
- Ringwald, M; Römer, K. Burstmac: A Mac Protocol with Low Idle Overhead and High Throughput. Adjunct Proceedings of The 4th IEEE/ACM International Conference on Distributed Computing in Sensor Systems (DCOSS), Santorini Island, Greece, June 11–14, 2008.
- ElBatt, TA; Ephremides, A. Joint Scheduling and Power Control for Wireless ad hoc Networks. Proceedings of IEEE International Conference on Computer Communications, Miami, FL, USA, October 14–16, 2002; 2, pp. 976–984.
- Fussen, M; Wattenhofer, R; Zollinger, A. Interference Arises at the Receiver. Proceedings of the International Conference on Wireless Networks, Communications and Mobile Computing, Cologne, Germany, August 28–September 2, 2005; 1, pp. 427–432.
- Incel, OD; Krishnamachari, B. Enhancing the Data Collection Rate of Tree-Based Aggregation in Wireless Sensor Networks. Proceedings of IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (SECON), Salt Lake City, UT, USA, June 27–30, 2008; pp. 569–577.
- Maróti, M; Kusy, B; Simon, G; Lédeczi, Á. The Flooding Time Synchronization Protocol. Proceedings of ACM Conference on Embedded Networked Sensor Systems, Baltimore, MD, USA, November 3–5, 2004.


© 2010 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Hamid, M.A.; Abdullah-Al-Wadud, M.; Chong, I. A Schedule-based Multi-channel MAC Protocol for Wireless Sensor Networks. Sensors 2010, 10, 9466-9480. https://doi.org/10.3390/s101009466
Hamid MA, Abdullah-Al-Wadud M, Chong I. A Schedule-based Multi-channel MAC Protocol for Wireless Sensor Networks. Sensors. 2010; 10(10):9466-9480. https://doi.org/10.3390/s101009466
Chicago/Turabian StyleHamid, Md. Abdul, M. Abdullah-Al-Wadud, and Ilyoung Chong. 2010. "A Schedule-based Multi-channel MAC Protocol for Wireless Sensor Networks" Sensors 10, no. 10: 9466-9480. https://doi.org/10.3390/s101009466