1. Introduction
Wind power has been developing rapidly worldwide due to fossil fuel energy depletion and environmental pollution. Offshore wind power is characterized by high wind energy density, high annual utilization hours, and close proximity to a power load center, and these advantages provide an important direction for future wind power development [
1]. Although offshore wind power technology is relatively mature, the economy and reliability of wind turbines with fixed bases have decreased significantly with the expansion of wind turbine installation in deep-water areas and the associated advantages of a floating base. In 2009, the first spar-type full-scale floating offshore wind turbine, Hywind, was successfully installed and commissioned [
2]. Subsequently, additional full-scale floating offshore wind turbines have been installed worldwide [
3].
Ocean waves, ocean currents, strong winds, and the complex marine environment pose a series of problems to the normal operation of floating wind turbines. First, turbulent wind affects the inflow velocity and angle of the wind turbine blades. The inertia of large-scale wind blades is large and the individual pitch control is difficult to achieve, due to the rapidly changing aerodynamic loads under turbulent wind conditions [
4]. Second, although the wind shear coefficient is smaller offshore than on land, the influence of the wind shear on the rotor power of the wind turbine cannot be ignored because the large hub height and long blades of offshore wind turbines cause a significant difference in the wind speed at the highest and lowest points of the wheel. Third, the floating platform swings periodically in a certain direction under the influence of the waves and currents. This phenomenon produces a large negative effect on the fatigue loads of the relevant components of the wind turbine [
5]. The periodic motion of the floating foundation also causes periodic fluctuations in the rotor power, and affects the quality of the electric power output [
1]. The 5 MW floating offshore wind turbine platform built by the US National Renewable Energy Laboratory (NREL) provides reliable basic data for offshore wind energy research [
6]. Since then, research on load fluctuations and optimal control of floating wind turbines has also been conducted extensively in the industry [
7]. Research on the use of blade flaps in wind turbines [
8,
9] has indicated that the trailing-edge flap structure of the wind turbine blade has technical advantages on the floating wind turbine. The wind turbine blade flaps do not only mitigate the load fluctuation effectively, but also supplement the traditional pitch control, which results in a more flexible and robust wind turbine control system.
Most of the aerodynamic analysis software packages such as Bladed and FAST are based on the Blade Element Momentum (BEM) theory. However, the wake-induced velocity in the BEM theory is the average induced velocity, and large errors can occur in the calculations, requiring many corrections. The vortex theory provides more accurate results for the wake flow field of the wind turbine when calculating the aerodynamic performance, and the induced velocity of the flow field is obtained directly from the wake flow [
10]. Therefore, the vortex theory is suitable for calculating the unsteady aerodynamic performance of wind turbines. The free vortex wake (FVW) method is based on the vortex theory, and has been successfully applied to the aerodynamic performance calculation of wind turbines.
The main objective of this study is to propose a trailing-edge flap control strategy for a large-scale offshore floating wind turbine to mitigate the rotor power fluctuations in the turbulent wind condition. The NREL 5 MW floating wind turbine is used as an example for the calculations. The previously developed FVW model [
10,
11] is used to calculate the rotor power of the wind turbine with the proposed trailing-edge flap control.
In
Section 2, the platform motions of the floating wind turbine are described.
Section 3 describes the turbulent wind condition.
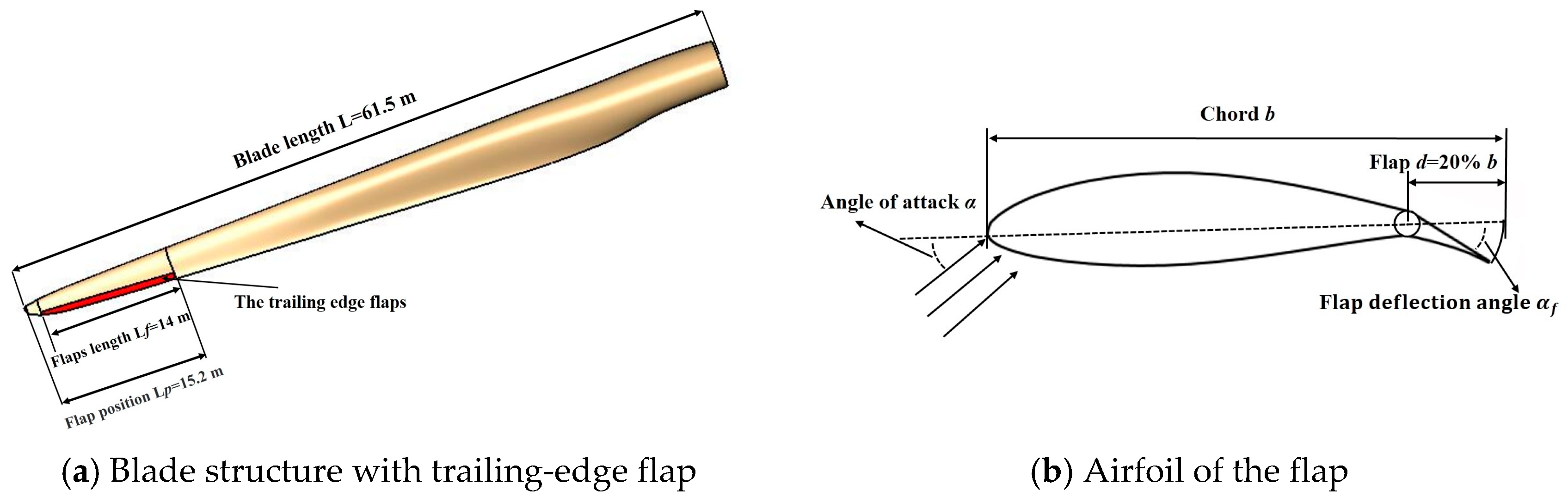
Section 4 describes the blade structure with the trailing-edge flap and control strategy for mitigating the rotor power fluctuations.
Section 5 briefly introduces the FVW method. The results are presented in
Section 6, and they include the control effect on the rotor power under different unsteady conditions. The conclusions are drawn in
Section 7.
2. Platform Motions of the Floating Wind Turbine
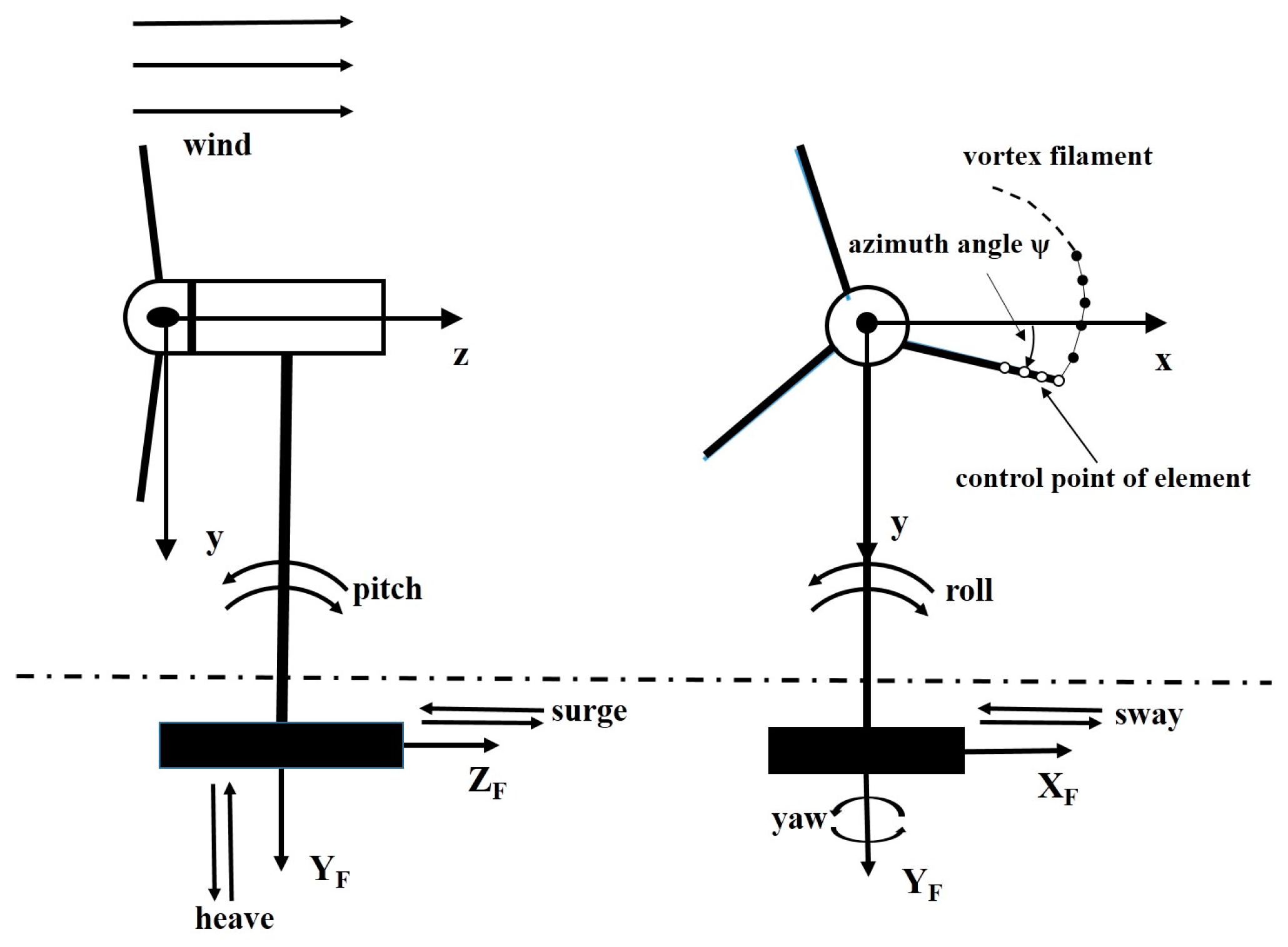
As shown in
Figure 1, the motion of the floating wind turbine platform can be described using a global coordinate system (
XF,
YF,
ZF) and a shaft coordinate system (
x,
y,
z) originating at the shaft of the turbine. Assuming that the wind turbine is a rigid structure, the floating wind turbine platform has six degree of freedom, in terms of translational and rotational motions in the global coordinate system; these are surge, sway, heave, pitch, roll, and yaw.
The NREL 5 MW wind turbine is located on a floating tension leg platform (TLP). The rated operating condition is maintained at the rated speed of 11.4 m/s and the rotor speed is 12.1 rpm. The resulting FAST-simulated platform kinematics of the TLP [
12] for the rated operating condition for a 300 s simulation was used in this study.
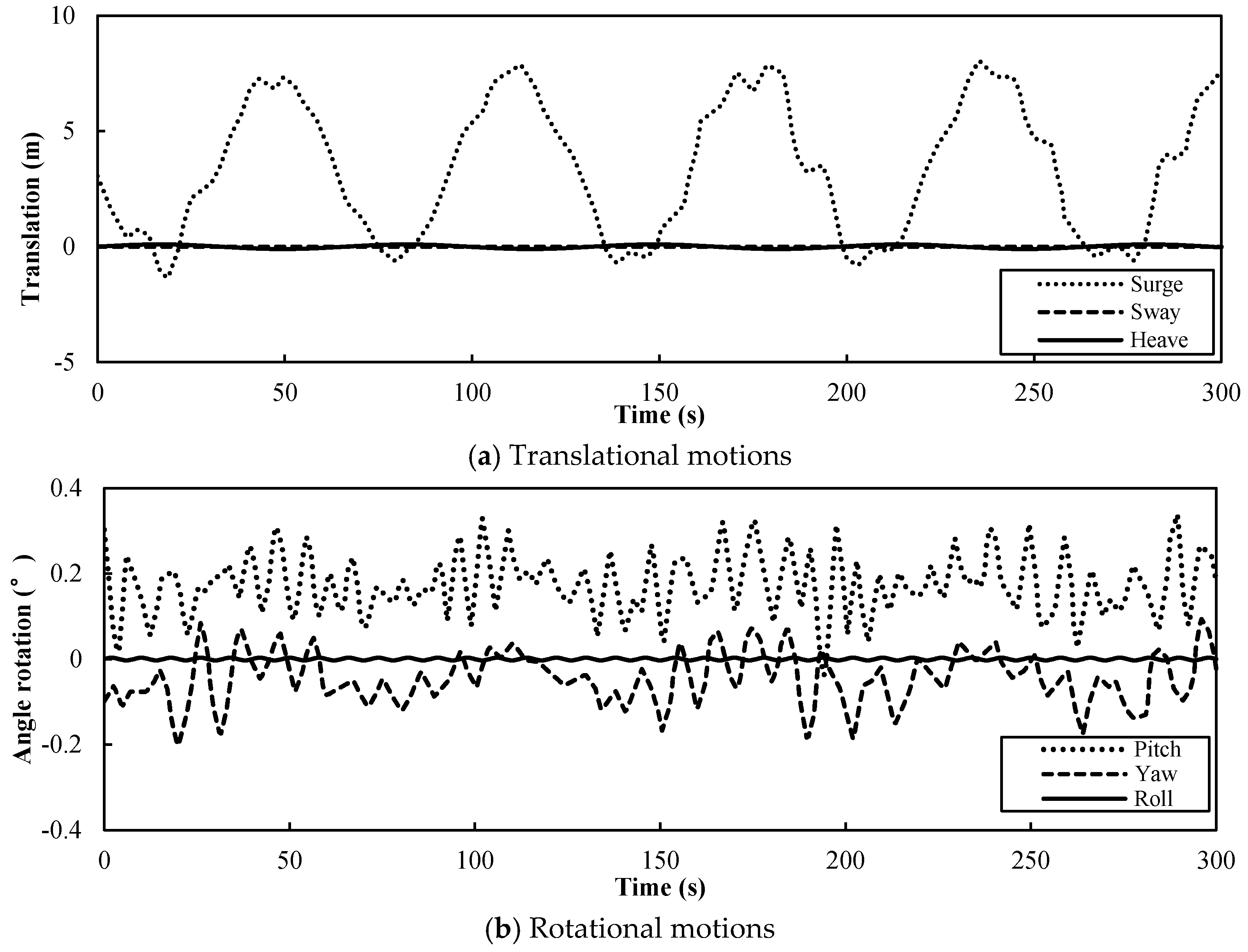
Figure 2a shows the three translational motions, and
Figure 2b shows the three rotational motions. It was observed that the mean and amplitude of the yaw, heave, and roll motions were small. The yaw motions had little effect on the wind turbine for a small angle, as the analysis of the influence of each degree-of-freedom motion on the aerodynamic performance showed. However, the pitch and surge motions had a large influence on the blade inflow of the wind turbine [
12]. Therefore, in this study, we only analyzed the influence of the pitch and surge motions on the aerodynamic performance of the floating wind turbine.
3. Turbulence Wind Condition
In land-based wind farms or offshore wind farms, the main factor affecting the load fluctuations of wind turbines, is turbulent wind. Due to the lack of relevant measured data of offshore turbulent wind, we simulated the turbulence of the offshore wind field using a turbulence model. The wavelet transform is an appropriate method to detect the local similarity in time-series data of turbulence [
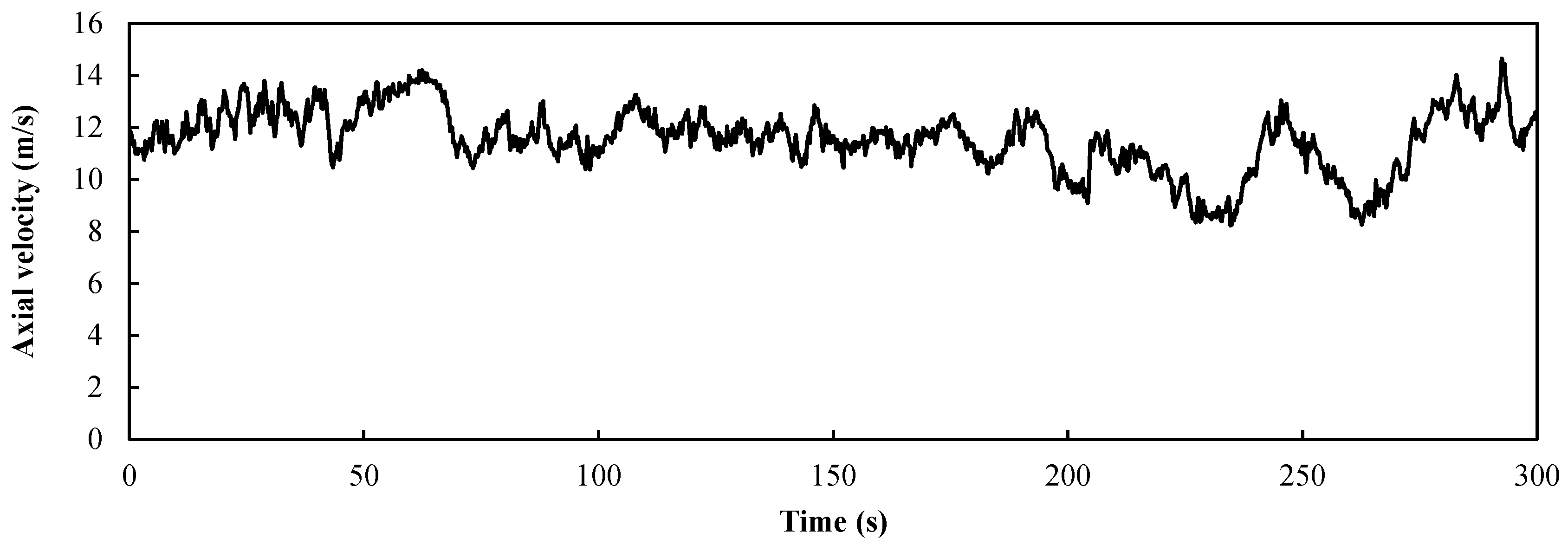
13]. In this study, a one-dimensional velocity change (axial component) was considered at the hub center height of 90 m under the turbulent condition. The wavelet inverse transformation method [
14] was used to calculate the turbulence wind field according to the advanced von Karman power density spectrum. The axial velocity varied around the rated wind speed of 11.4 m/s from 0 to 300 s, as shown in
Figure 3. The roughness of the ocean surface was 0.001 mm, and the turbulence intensity was 0.0933.
Wind shear exists in the atmosphere near the ground and sea surface because of the topography and the sea surface roughness. The oncoming boundary layer wind velocity profile is described as:
where
href is the reference height (hub center height) and
Uref is the wind speed at the reference height. The power law exponent
α is associated with the local terrain roughness.
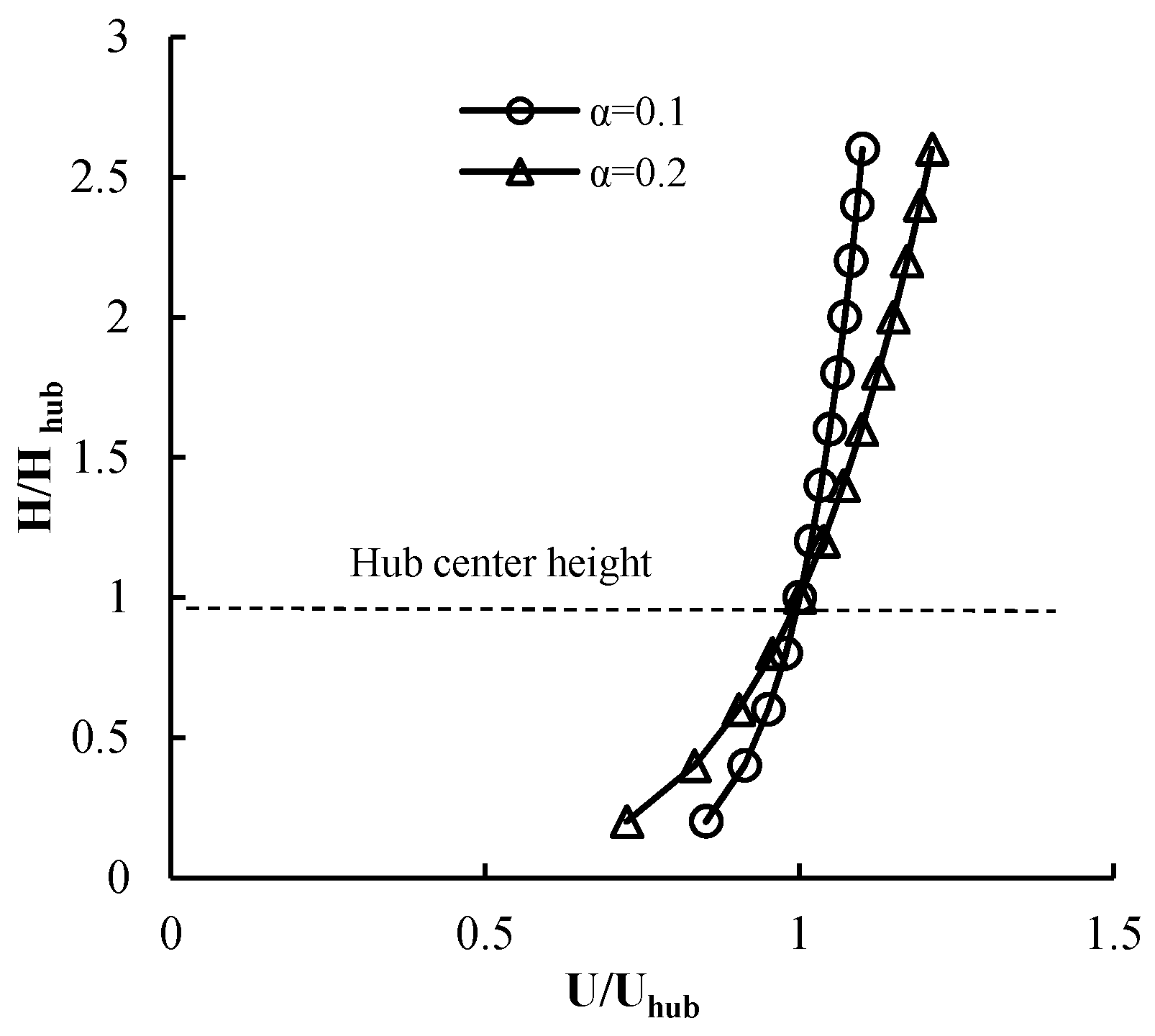
Figure 4 shows the wind shear distribution near the ground, in which
α = 0.1 is the value for the offshore sea and
α = 0.2 is the value for land. Although the power law exponent is smaller offshore, the wind turbine output force changes due to the wind shear, because the large-scale offshore wind turbine has a diameter of more than 100 m. The hub center height of the NREL 5 MW wind turbine was 90 m, and the diameter of the rotor is 126 m. At a hub wind speed of 11.4 m/s, the maximum wind speed of the wheel reached 12.02 m/s, and the lowest wind speed is 10.11 m/s.
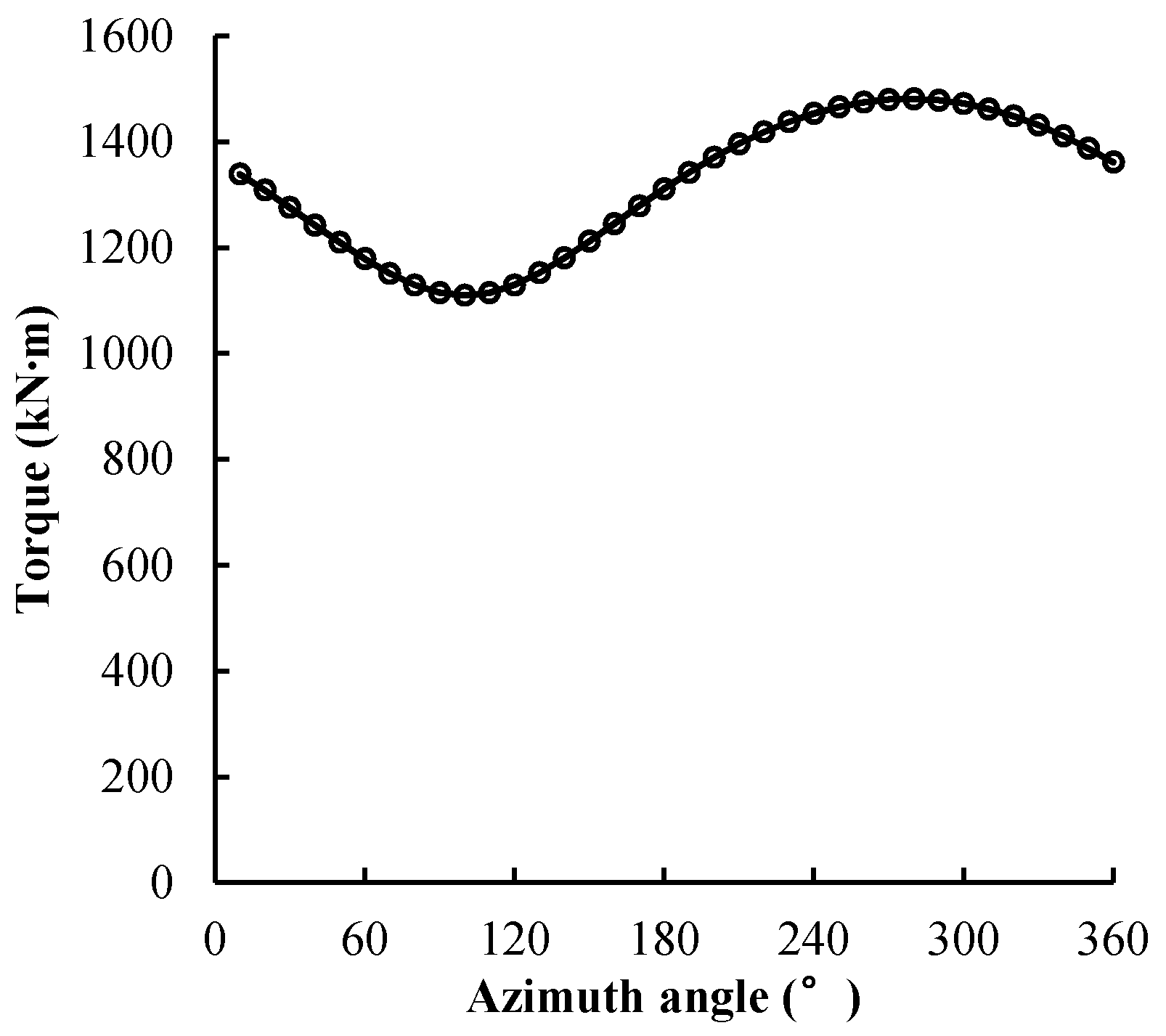
Figure 5 shows the aerodynamic torque of a single blade of the NREL 5 MW wind turbine during a rotating period under wind shear at the rated wind speed. The range of the aerodynamic torque during the period is 1110–1482 k∙Nm. The amplitude is 28% of the average. Therefore, the wind shear needs to be taken into account.
6. Results and Discussion
Appropriate flap control parameters are required to achieve a good control effect. In the following section, we discussed the influence of the control parameters on the control performance under the unsteady conditions comprised of turbulent wind, wind shear, and platform motion.
We set
a as the ratio of the flap control angle ∆
αft for the turbulence to the maximum deviation value ∆
ut of the turbulent wind (
a = ∆
αft/∆
ut). It can be seen from
Figure 3 that the maximum deviation ∆
ut of the turbulent wind was 2.6 m/s, and the power curves of the four control factors are obtained by setting ∆
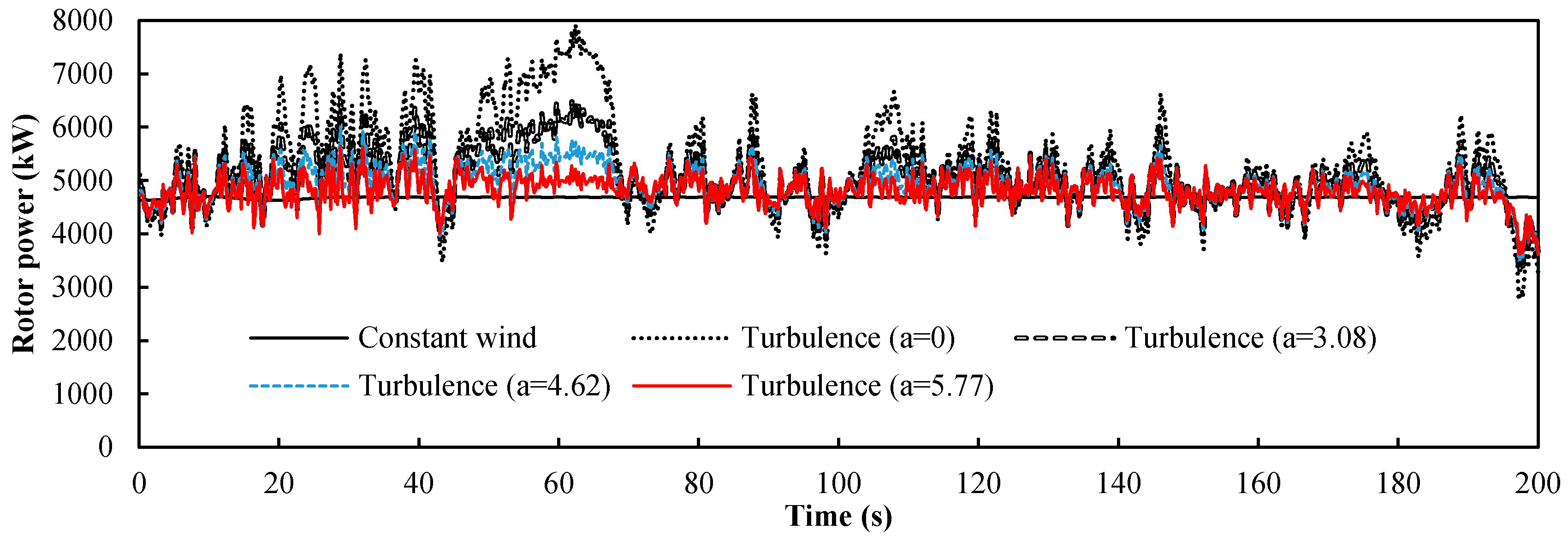
αft as 0°, 8°, 12°, and 15° respectively. The power response of the wind turbine from 0 to 200 s is shown in
Figure 8 and was based on the turbulent wind condition shown in
Figure 3. The input of the control group is a constant wind and the rotor power of the wind turbine is 4.7 MW, slightly less than the rated power. This is because the origin of the flap was −5°. It was obvious that the turbulent wind had a large influence on the stability of the wind turbine and the maximum deviation of the power fluctuation reaches 60% of the stable power when
a = 0. We present four curves with different control factors. The amplitude of the curve for the turbine with the controlled flap (
a > 0) was clearly smaller than that of the turbine with the fixed flap (
a = 0). In
Table 1, the statistical results of the rotor power with the four different control factor values of
a are summarized. It is evident that the average value varied little, but the larger the value
a, the smaller the standard deviation was, and the closer the maximum and minimum were to the mean value. This shows that the larger the value of
a, the better the flap control system worked. Therefore, the maximum value of
a (5.77) was the appropriate value for this turbulent condition.
The control factor
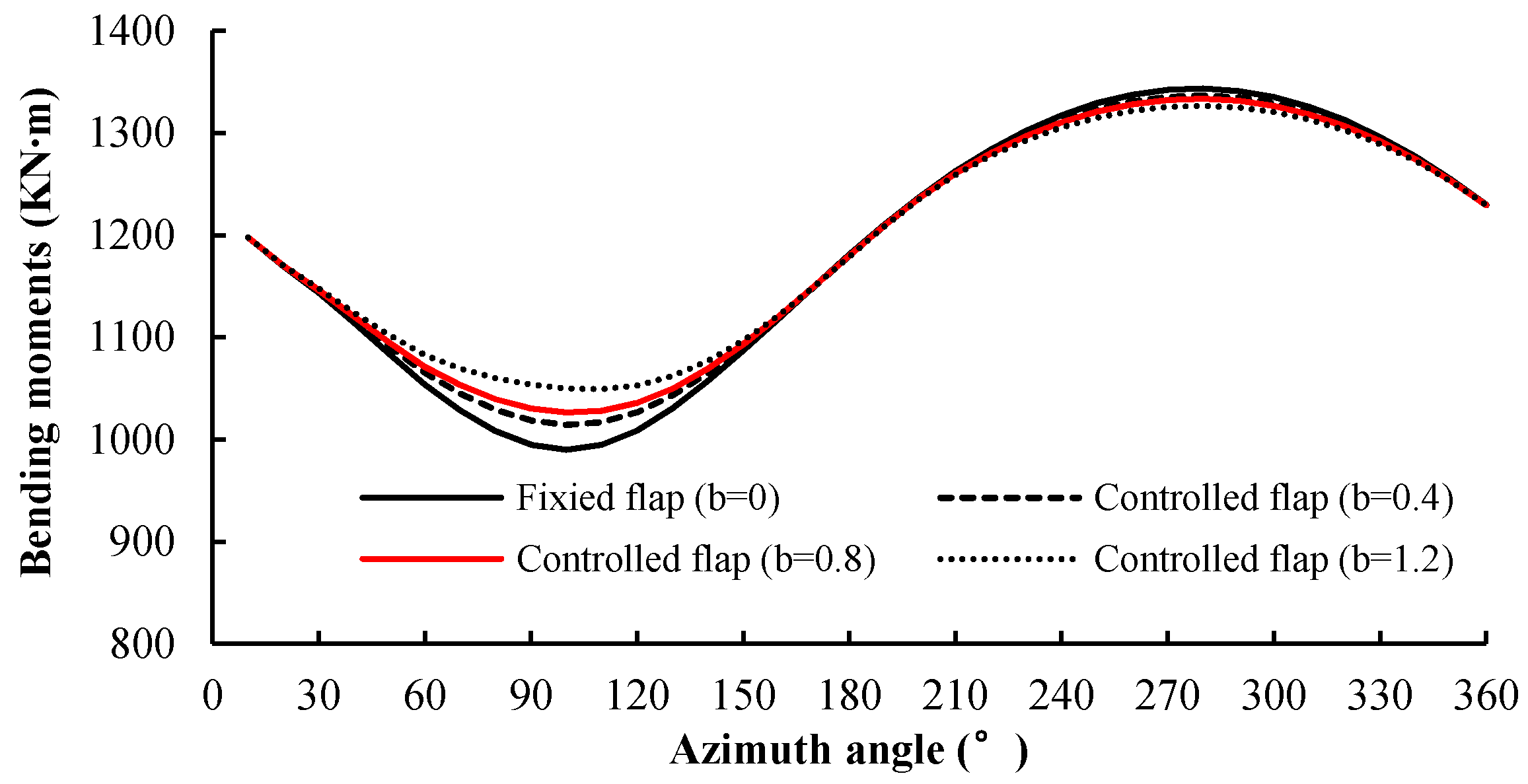
b for the wind shear was equal to the maximum flap deflection angle ∆
αfs, which was set as 0°, 0.4°, 0.8°, and 1.2°. It can be seen from
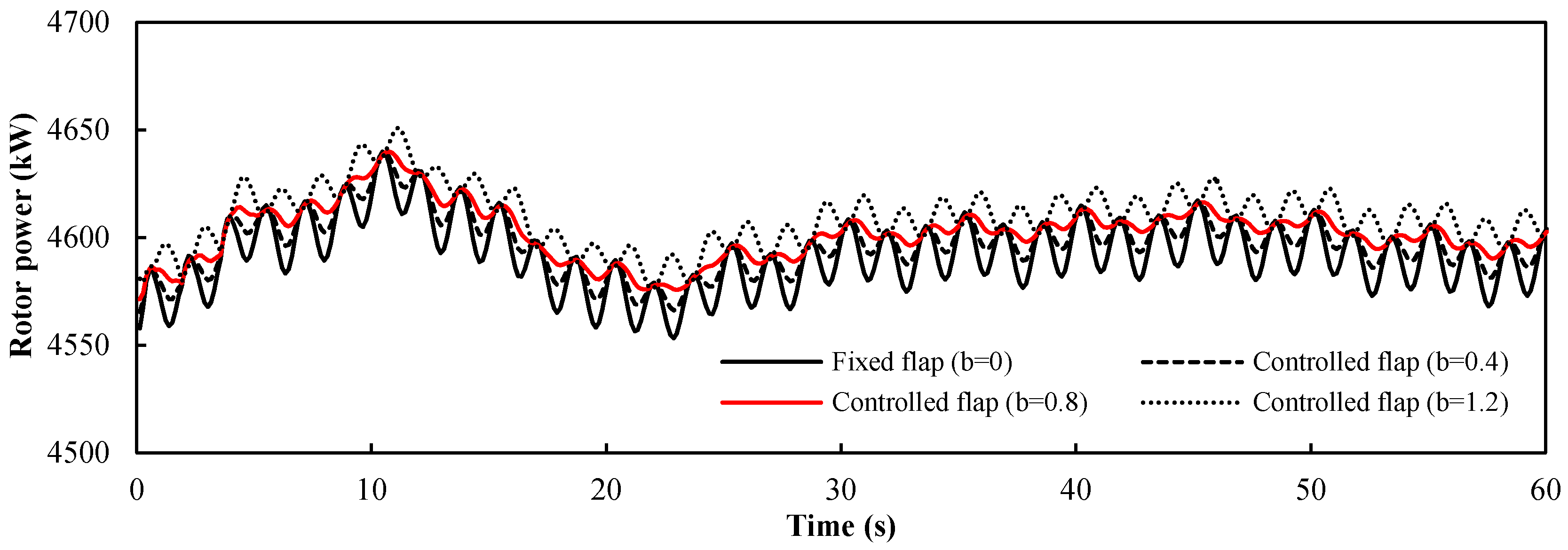
Figure 9 that the wind shear could cause obvious aerodynamic bending moment fluctuations at the root of a single blade. The control effect on the aerodynamic bending moment at the 90° azimuth angle was more obvious than that at the 270° azimuth angle, because of the different wind speed gradient. However, due to the superposition of the three blades, the total aerodynamic power of the turbine did not fluctuate as much, as shown in
Figure 10. Under the wind shear condition, the rotor power curve exhibits low-frequency fluctuations in the first 30 s. This occurs because the flow field was calculated by the constant flow field prior to time 0, and the wind shear field was calculated after time 0, and the induction of the new wake had a continuous effect on the blade load. In the four curves, the amplitude decreased as the value of
b increased, but when
b = 1.2, the amplitude of the power fluctuation reversed. The statistical metrics of the four values of the control factor
b are shown in
Table 2. The mean value of each group of data was very close, and the maximum and minimum values were very similar. The change values between the maximum and minimum values were about 70 kW. At
b = 0.8, the standard deviation reached the minimum value; therefore, 0.8 was the appropriate value of the control factor
b.
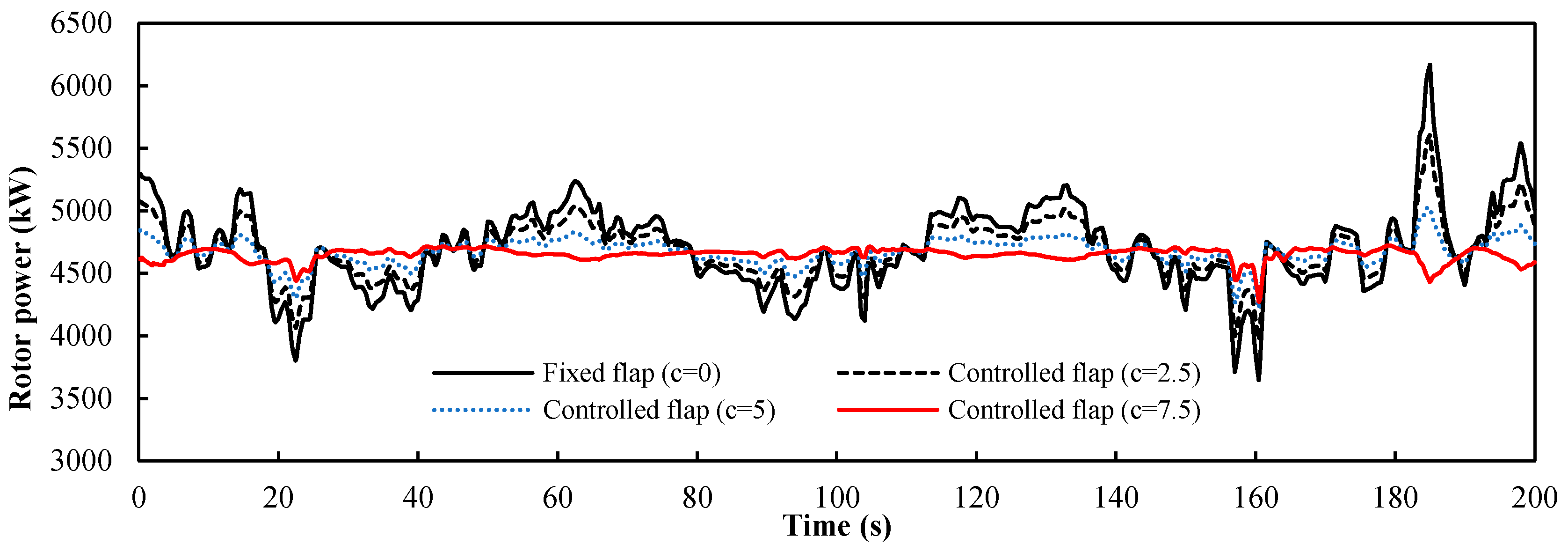
The analysis of the platform motions indicates that the influence on the wind turbine load mainly consists of pitch and surge motion. The control factor
c is set as the ratio of the maximum flap deflection angle ∆
αfp to the maximum deviation ∆
up of the axial wind velocity caused by two kinds of platform motions (
c = ∆
αfp/∆
up). Here ∆
up = 2 m/s can be obtained from the platform motion data. Four values were selected to study the influence of the control factor on the control performance.
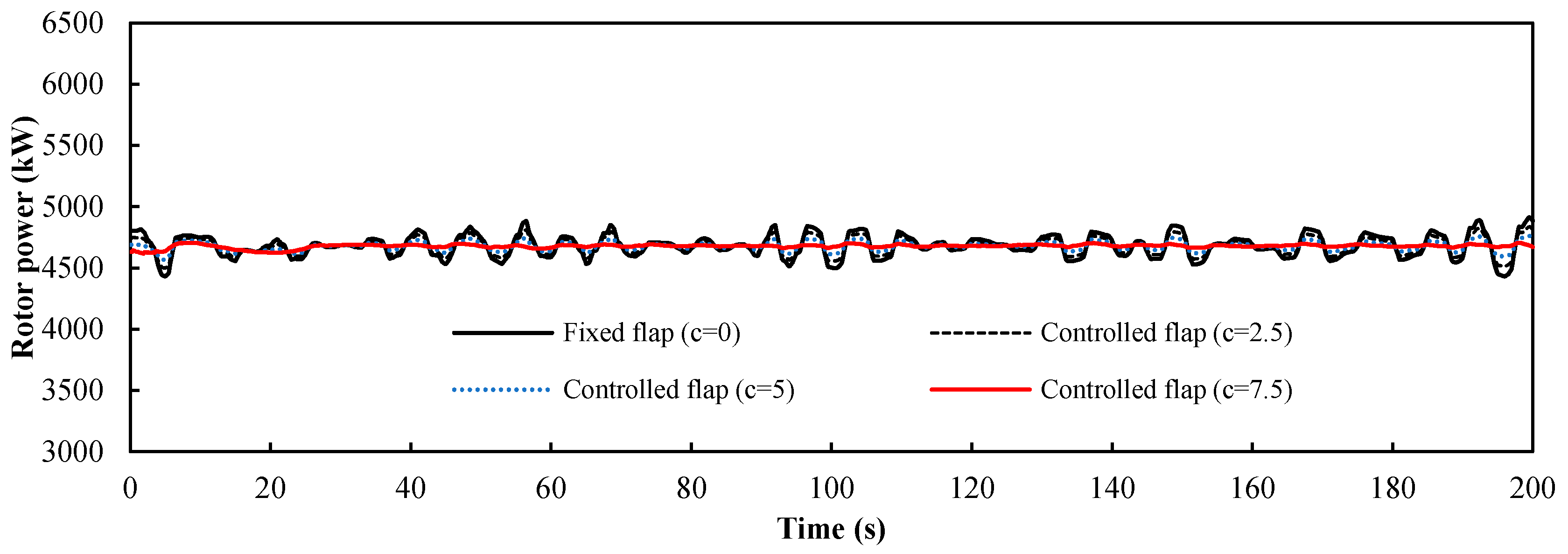
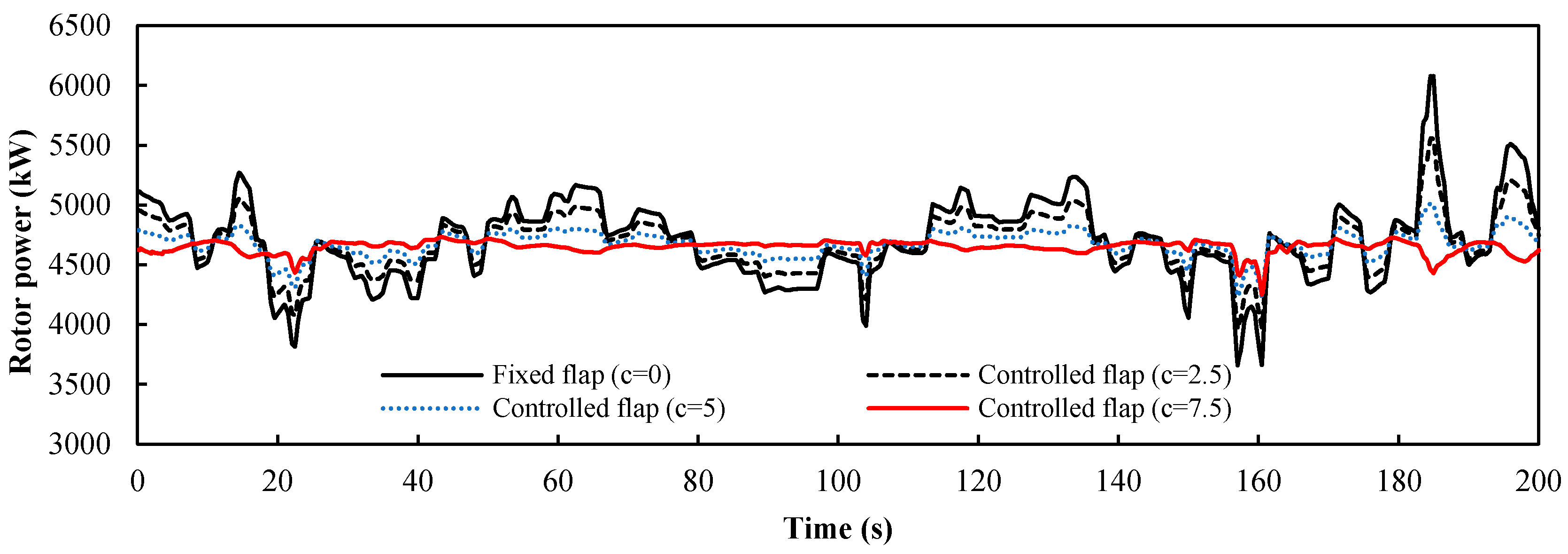
Figure 11 is the load response of the pitch motions, and
Figure 12 is the load response of the surge motions. It was evident that the power fluctuation caused by the surge motions was larger than that caused by the pitch motions for the same flap deflection angle. The frequency of the load fluctuation caused by the platform was smaller than that caused by the turbulent wind and the greater the control factor, the better the control effect is.
Figure 13 shows the load response of the wind turbine under the combined pitch and surge motions. The result is similar to the load response of the surge motion, which indicates that the surge motion is the dominant motion type. There are no apparent fluctuations when the control factor
c is equal to the maximum value 7.5, which shows that the trailing-edge flaps have a positive effect on the low-frequency fluctuations, such as the platform motion. The statistical metrics of the curves with different control factor value
c are shown in
Table 3. As
c increases, the mean value decreases only slightly but the standard deviation decreases markedly. When
c reaches the maximum value, the standard deviation reaches the minimum value. As a result, 7.5 is the optimal value of the control factor
c.
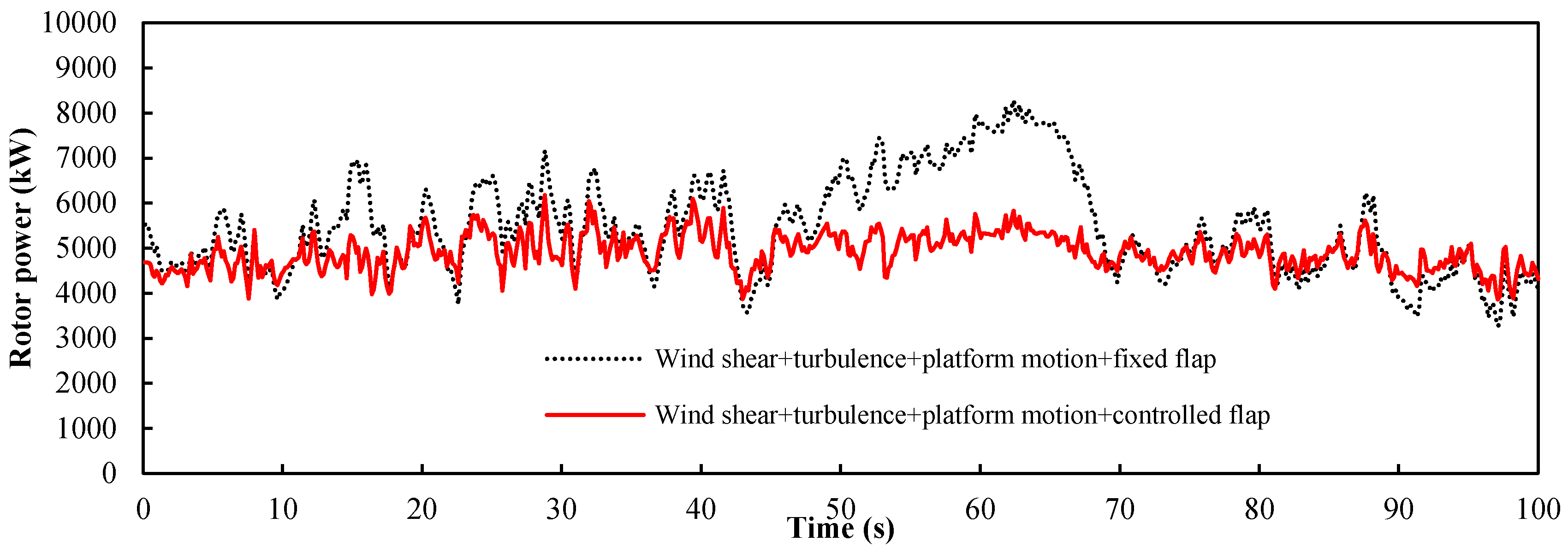
When the input wind condition is the turbulent wind, turbulent wind, wind shear and platform motions will affect the rotor power together. The above results indicated that the trailing-edge flap had a good mitigation effect on the power fluctuations caused by the three kinds of dynamic inputs when
a = 5.77,
b = 0.8, and
c = 7.5. We used these values for the three parameters to achieve the linear control of the flap.
Figure 14 shows the power response of the turbine for all three dynamic inputs.
Table 4 shows the statistical metrics of the two curves in
Figure 14. It was observed that the controlled trailing-edge flap mitigates the rotor power fluctuations of the wind turbine under these conditions. Under the combined action of the three kinds of dynamic inputs, the controlled flap reduced the standard deviation of the power fluctuations from 1095 to 404.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}