Plant Friendly Input Design for Parameter Estimation in an Inertial System with Respect to D-Efficiency Constraints

Abstract
:1. Introduction
2. Input Friendliness Factor
- –
- A-optimality: tr(M−1), minimises the average variance of the parameters,
- –
- E-optimality: λmax(M−1), minimises the maximum eigenvalue of M−1,
- –
- D-optimality: minimises the volume of the ellipsoidal confidence region of parameter estimates.
3. Single Weighted Cost Function Method for a Time Domain Input Signal
- –
- maximise tr(M),
- –
- maximise ΦI as defined in Equation (3).
4. Plant Friendly Identification Problem Formulation
4.1. Input Friendliness Factor Formulation
4.2. The D-Efficiency Constraint Formulation
5. Plant-Friendly Identification with Respect to the Cost Function D-Efficiency Constraint
6. Experimental Results for the Inertial Case Study
7. Conclusions
Acknowledgments
Conflicts of Interest
References
- Godfrey, K. Perturbation Signals for System Identification; Prentice-Hall: Englewood Cliffs, NJ, USA, 1993. [Google Scholar]
- Ljung, L. System Identification: Theory for the User; Prentice-Hall: Englewood Cliffs, NJ, USA, 1999. [Google Scholar]
- Pintelon, R.; Schoukens, J. System Identification: A Frequency Domain Approach; John Wiley & Sons: New York, NY, USA, 2001. [Google Scholar]
- Kalaba, R.; Spingarn, K. Control, Identification, and Input Optimization; Plenum Press: New York, NY, USA, 1982. [Google Scholar]
- Mehra, R. Choice of Input Signals. In Trends and Progress in Systems Identification; Eykhoff, P., Ed.; Pergamon Press: New York, NY, USA, 1981. [Google Scholar]
- Hugo, A.J. Process controller performance monitoring and assessment. Control. Arts Inc. 2001. Available online: http://www.controlarts.com/ accessed on 20 March 2014.
- Ren, M.; Wu, D.; Zhang, J.; Jiang, M. Minimum entropy-based cascade control for governing hydroelectric turbines. Entropy 2014, 16, 3136–3148. [Google Scholar]
- Meng, Q.; Fang, F.; Liu, J. Minimum-information-entropy-based control performance assessment. Entropy 2013, 15, 943–959. [Google Scholar]
- Walter, E.; Pronzato, L. Qualitative and quantitative experiment design for phenomenological models-a survey. Automatica 1990, 26, 195–213. [Google Scholar]
- Pronzato, L.; Thierry, E. A minimum-entropy estimator for regression problems with unknown distribution of observation errors; Research Report 00–08, Laboratoire d’Informatique, Signaux et Syst’emes I3S-UMR6070-UNSA; CNRS: Sophia-Antipolis, France, 2000. Available online: http://www.i3s.unice.fr/%7Epronzato/biblio.html accessed on 20 March 2014.
- Wolsztynski, E.; Thierry, E.; Pronzato, L. Minimum-entropy estimation in semi-parametric models. Signal Process 2005, 85, 937–949. [Google Scholar]
- Indiveri, G. An entropy-like estimator for robust parameter identification. Entropy 2009, 11, 560–585. [Google Scholar]
- Zarrop, M.B. Optimal Experiment Design for Dynamic System Identification; Lecture Notes in Control and Information Sciences; Volume 21, Springer-Verlag: Berlin, Germany, 1979. [Google Scholar]
- Antoulas, A.; Anderson, B. On the choice of inputs in identification for robust control. Automatica 1999, 35, 1009–1031. [Google Scholar]
- Gevers, M.; Ljung, L. Optimal experiments designs with respect to the intended model application. Automatica 1986, 22, 543–554. [Google Scholar]
- Hildebrand, R.; Gevers, M. Identification for control: Optimal input design with respect to worst-case v-gap cost function. SIAM J. Control Optim. 2003, 41, 1586–1608. [Google Scholar]
- Pronzato, L. Optimal experimental design and some related control problems. Automatica 2008, 44, 303–325. [Google Scholar] [Green Version]
- Hussain, M. Review of the applications of neural networks in chemical process control-simulation and on-line implementation. Artif. Intell. Eng. 1999, 13, 55–68. [Google Scholar]
- Narasimhan, S.; Rengaswamy, R. Multi-objective input signal design for plant friendly identification of process systems. Proceeding of the American Control Conference, Boston, MA, USA, 30 June–2 July 2004; pp. 4891–4896.
- Narasimhan, S.; Rengaswamy, R. Multi-objective optimal input design for plant friendly identification. Proceeding of the American Control Conference Seattle, Washington, WA, USA, 11–13 June 2008; pp. 1304–1309.
- Rivera, D.; Braun, M.; Mittelmann, H. Constrained multisine inputs for plant friendly identification of chemical process. Proceeding of the IFAC World Congress, Barcelona, Spain, 21–26 July 2002.
- Rivera, D.; Lee, H.; Braun, M.; Mittelmann, H. Plant friendly system identification: A challenge for the process industries. Proceeding of the SYSID 2003, Rotterdam, The Netherlands, 27 August 2003.
- Steenis, R.; Rivera, D. Plant-Friendly Signal Generation for System Identification Using a Modified Simultaneous Perturbation Stochastic Approximation (SPSA) Methodology. IEEE Trans. Control Syst. Technol. 2011, 19, 1604–1612. [Google Scholar]
- Rivera, D.; Lee, H.; Mittelmann, H.; Braun, M. Using plant-friendly multisine signals to identify a strongly interactive process. IEEE Control Syst. Mag. 2007, 27, 72–89. [Google Scholar]
- El-Kady, M.; Salim, M.; El-Sagheer, A. Numerical treatment of multiobjective optimal control problems. Automatica 2003, 39, 47–55. [Google Scholar]
- Jakowluk, W. Design of an optimal excitation signal for identification of inertial systems in time domain. Przegląd Elektrotechniczny 2009, 85, 125–129. [Google Scholar]
- Jakowluk, W. D-Optimal Experiment Design for Estimating Parameters of Dynamic Systems. Ph.D. Dissertation, Faculty of Electrical Engineering, Bialystok University of Technology, 2008. [Google Scholar]
- Jakowluk, W. Design of an optimal actuation signal for identification of a torsional spring system. Przegląd Elektrotechniczny 2011, 87, 154–160. [Google Scholar]
- Atkinson, A.; Donev, A.; Tobias, R. Optimum Experimental Design with SAS; Oxford University Press: Oxford, UK, 2007. [Google Scholar]
- Parker, R.; Heemstra, D.; Doyle, F.; Pearson, R.; Ogunnaike, B. The identification of nonlinear models for process control using tailored “plant-friendly” input sequences. J. Process Control 2001, 11, 237–250. [Google Scholar]
- Guillaume, P.; Schoukens, J.; Pintelon, R.; Kollar, I. Crest-factor minimization using nonlinear Chebyshev approximation methods. IEEE Trans. Instrum. Measur. 1991, 40, 982–989. [Google Scholar]
- Uciński, D.; Chen, Y.Q. Sensor Motion Planning in Distributed Parameter Systems Using Turing’s Measure of Conditioning. Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, 13–15 December 2006; pp. 759–764, WeB03.6, (published on CD-ROM).
- Schwartz, A.; Polak, E.; Chen, Y. A. MATLAB toolbox for solving optimal control problems. Version 1.0 for Windows. May 1997. accessed on 20 March 2014. Available online: http://www.schwartz-home.com/RIOTS/.
- Stryk, O. User’s quide for DIRCOL, a direct collocation method for the numerical solution of optimal control problems. Version 2.1; Technische Universität Darmstadt: Germany, November 1999. accessed on 20 March 2014. Available online: http://www.sim.informatik.tu-darmstadt.de/index/leftnav.html.
- Jennings, L.; Fisher, M.; Teo, K.; Goh, C. MISER 3: Optimal control software. Version 2.0; Theory and user manual. Dept. of Mathematics, University of Western Australia: Nedlands, 2002. Available online: school.maths.uwa.edu.au/~les/miser/Misermanual.pdf accessed on 20 March 2014.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
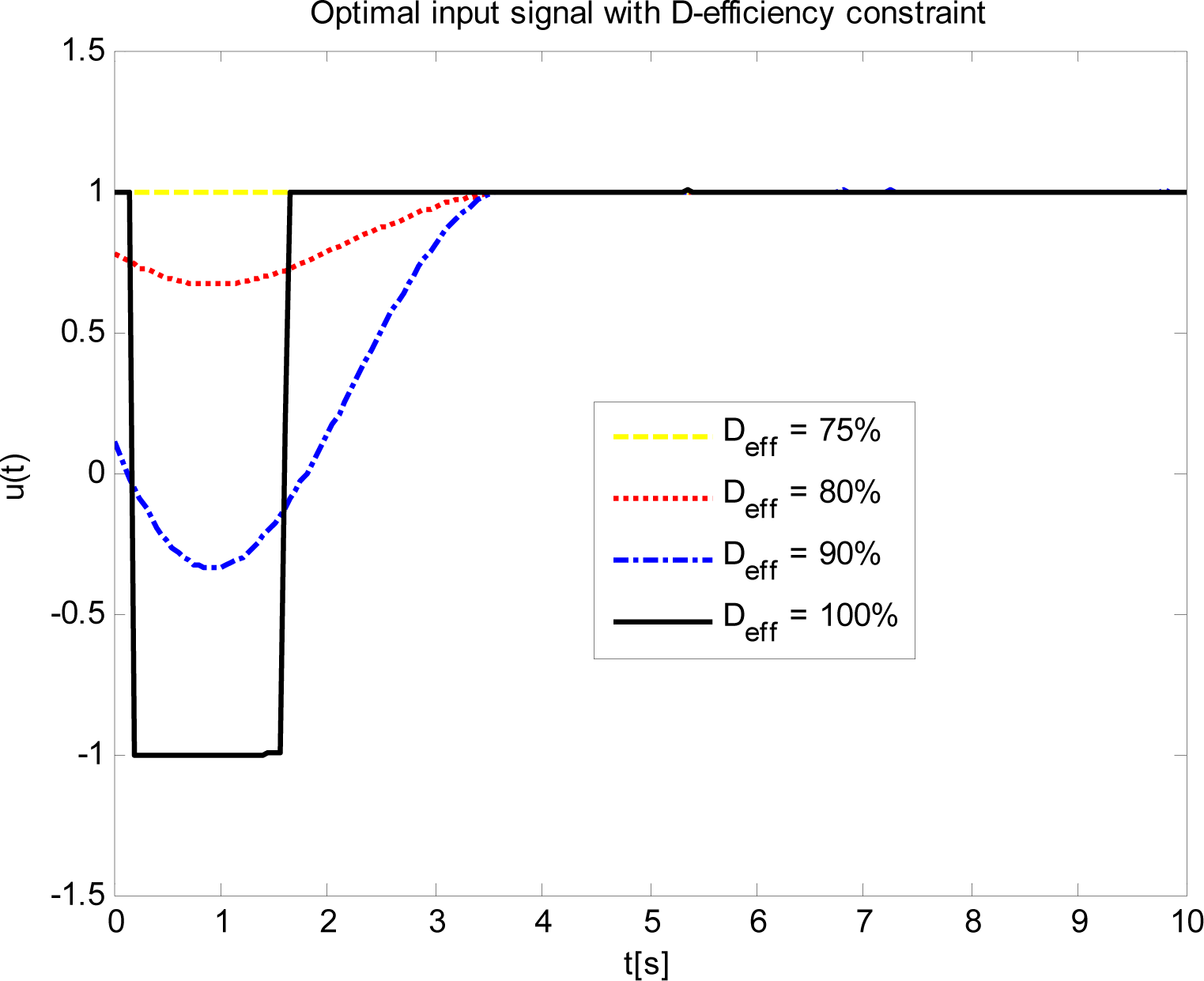
| Deff/Deff, opt | μ | D | J | Φi |
|---|---|---|---|---|
| 100% | 0.00 | — | 43.88 | — |
| 90% | 50.00 | 35.60 | 32.03 | 0.88 |
| 80% | 50.00 | 28.10 | 26.18 | 0.97 |
| 75% | 50.00 | 25.00 | 25.00 | 1.00 |
© 2014 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jakowluk, W. Plant Friendly Input Design for Parameter Estimation in an Inertial System with Respect to D-Efficiency Constraints. Entropy 2014, 16, 5822-5837. https://doi.org/10.3390/e16115822
Jakowluk W. Plant Friendly Input Design for Parameter Estimation in an Inertial System with Respect to D-Efficiency Constraints. Entropy. 2014; 16(11):5822-5837. https://doi.org/10.3390/e16115822
Chicago/Turabian StyleJakowluk, Wiktor. 2014. "Plant Friendly Input Design for Parameter Estimation in an Inertial System with Respect to D-Efficiency Constraints" Entropy 16, no. 11: 5822-5837. https://doi.org/10.3390/e16115822